Изобретение относится к области вооружения и военной техники, в частности к области защиты наземных объектов от средств воздушного нападения.
Известна установка, которая может быть использована для защиты наземных объектов от средств воздушного нападения, включающая гранатомет и прицел ПГН-1, служащий для прицеливания и наблюдения за полем боя ночью [1].
Прицел включает электронно-оптическую систему, механизм выверки и установки углов прицеливания, механизм светофильтра, механизм защиты прицела от засветки, высоковольтный источник питания и аккумуляторную батарею.
В процессе стрельбы из гранатомета по движущейся цели осуществляют обнаружение и опознавание цели, визуальное определение дальности до цели и ее скорости.
Недостатком данной установки является низкая эффективность стрельбы по скоростным воздушным целям, обусловленная большими погрешностями глазомерного способа определения дальности до цели и ее скорости.
Наиболее близкой по технической сущности и достигаемому результату и выбранной за прототип является система защиты боевой машины от средств воздушного нападения, включающая орудие, обзорно-прицельную систему, блок управления, включающий вычислительное устройство и электрически соединенные с ним блок ввода данных и команд управления, и видеомонитор, а также источник питания. Дальность до цели определяется с помощью лазерного дальномера [2].
Перед стрельбой осуществляют: обнаружение и опознавание цели, захват цели на сопровождение, сопровождение цели прицельно-навигационной системой, определение текущих углов упреждения в вертикальной и горизонтальной плоскостях, отклонение ствола орудия в соответствии с полученными углами упреждения.
В прототипе устранена присущая предыдущему аналогу низкая эффективность стрельбы по скоростным воздушным целям, обусловленная большими погрешностями глазомерного способа определения дальности до цели и ее скорости.
Однако прототип имеет и недостатки, заключающиеся в невозможности использования данной установки для стрельбы на площадках, удобных для противовоздушной обороны, но недоступных для крупногабаритных зенитных систем, например в городских условиях на крышах зданий и т.п., а также ее демаскировка при определении дальности до цели с помощью лазерного дальномера.
Техническим результатом изобретения является расширение зон использования установок для стрельбы по скоростным низколетящим целям при сохранении высокой эффективности стрельбы, а также устранение возможности их обнаружения противником до осуществления выстрела.
Кроме того, при использовании изобретения значительно снижаются экономические затраты на создание средств защиты наземных объектов от средств воздушного нападения.
Технический результат достигается тем, что установка для стрельбы по скоростным низколетящим целям включает оружие, обзорно-прицельную систему и блок управления, включающий вычислительное устройство и электрически соединенные с ним блок ввода данных и команд управления и видеомонитор, а также источник питания.
Согласно изобретению в качестве оружия установка содержит, по крайней мере, один гранатомет, блок управления снабжен мультиплексором, а обзорно-прицельная система включает, по крайней мере, два установленных на заданном базовом расстоянии друг от друга и выполненных с возможностью формирования телевизионного сигнала прицела.
Каждый из прицелов снабжен двухкоординатным поворотным устройством и датчиком углов места и азимута их оптической оси, кроме того, по крайней мере, один из них конструктивно связан со стволом гранатомета.
Каждый из гранатометов имеет датчик углов места и азимута оси его ствола.
Выход телевизионного сигнала каждого из прицелов электрически соединен со входом телевизионного сигнала данного прицела в вычислительном устройстве. Выход датчика углов места и азимута каждого из прицелов электрически соединен со входом вычислительного устройства ввода данных о положении в пространстве данного прицела. Выход датчика угла места и азимута каждого из гранатометов электрически соединен со входом вычислительного устройства ввода данных о положении в пространстве ствола данного гранатомета. Вход двухкоординатного поворотного устройства каждого из прицелов электрически соединен с выходом управления вычислительного устройства положением в пространстве данного прицела. Вычислительное устройство электрически соединено с видеомонитором через мультиплексор.
Достижение технического результата обеспечивается использованием всей совокупности существенных признаков, присущих изобретению.
В одном из вариантов (стационарном) выполнения изобретения гранатометы могут быть установлены на опорах и иметь двухкоординатные поворотные устройства их стволов по углам места и азимута, причем вход двухкоординатного поворотного устройства ствола гранатомета в данном случае электрически соединен с выходом управления вычислительного устройства положением ствола данного гранатомета.
Гранатомет вместе с его прицелом, двухкоординатным поворотным устройством и опорой может быть установлен на автомобильном шасси. Это значительно повышает мобильность установки для стрельбы.
В другом варианте выполнения установка для стрельбы может содержать, по крайней мере два, выполненных в ручном варианте и расположенных на заданных базовых расстояниях друг от друга гранатомета, каждый из которых имеет прицел, конструктивно связанный с его стволом, и минимонитор, вход которого электрически соединен с выходом телевизионного сигнала вычислительного устройства для данного минимонитора. В этом случае блок ввода данных и команд управления включает для каждого гранатомета пульт управления, вход которого электрически соединен с выходом управления данным пультом в вычислительном устройстве. Пульт управления может быть выполнен в виде джойстика.
Применение лазерных дальномеров в прототипе позволяет средствам воздушного нападения противника обнаружить установку для стрельбы еще до осуществления выстрела. Использование же неизлучающих прицелов, как в стационарном, так и в ручном вариантах выполнения изобретения, кроме прямого назначения, также и для определения дальности до цели позволяет избежать демаскировки установки для стрельбы до осуществления выстрела.
Прицелы могут быть выполнены телевизионными, тепловизионными или двухканальными, причем в последнем случае один из каналов выполняется телевизионным, а другой канал - тепловизионным. При выполнении прицела двухканальным установка для стрельбы может быть использована в любое время суток.
Для автоматического ввода в вычислительное устройство данных о применяемом боеприпасе боеприпасы имеет штрих-код, а установка снабжена датчиком штрих-кода боеприпаса, причем выход датчика штрих-кода боеприпаса электрически соединен со входом вычислительного устройства ввода данных о типе боеприпаса. Датчик штрих-кода боеприпаса может быть размещен на стволе гранатомета. Использование штрих-кода на боеприпасах и датчиков штрих-кода боеприпаса позволяет при использовании боеприпасов разного типа минимизировать время ввода в вычислительное устройство данных о применяемом боеприпасе, что, в конечном итоге, минимизирует время прицеливания.
Изобретение иллюстрируется чертежами, где:
на фиг.1 изображена схема определения положения упрежденной точки,
на фиг.2 изображена установка в ручном варианте выполнения,
на фиг.3 изображена установка в стационарном варианте выполнения,
на фиг.4 изображено расположение гранатометов в ручном варианте выполнения.
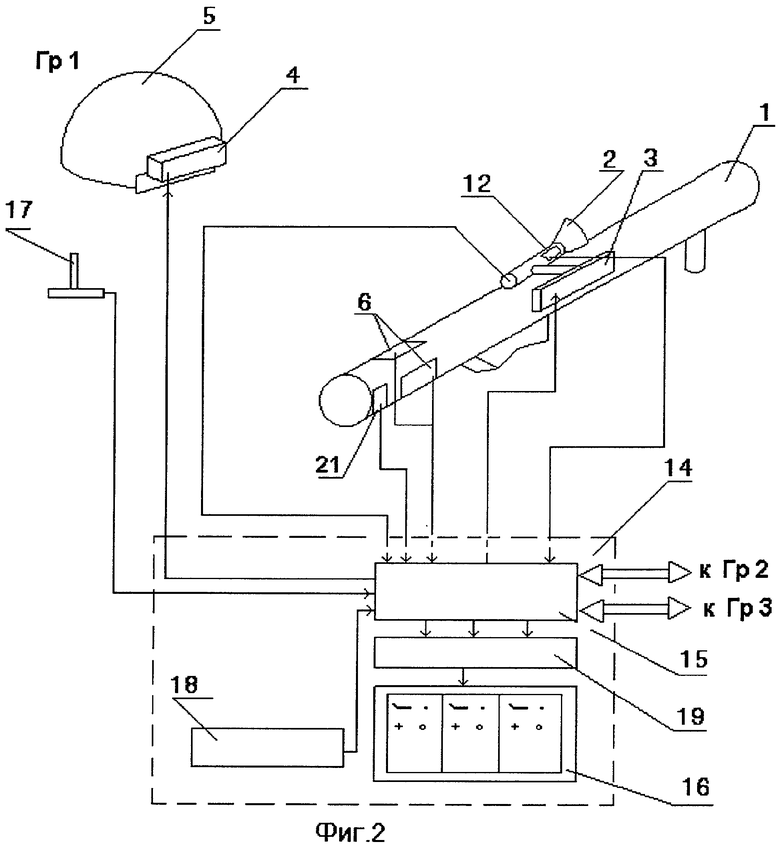
Установка для стрельбы по скоростным низколетящим воздушным целям включает (фиг.2) гранатомет 1, прицел 2 гранатомета 1, закрепленный на двухкоординатном поворотном устройстве 3, установленном на стволе гранатомета 1, и минимонитор 4 (для ручного варианта выполнения установки), закрепленный на каске 5 гранатометчика. На стволе гранатомета 1 закреплен также датчик углов места и азимута 6 оси ствола гранатомета. 1.
В варианте выполнения, который условно можно назвать стационарным (фиг.3), гранатомет имеет двухкоординатное поворотное устройство 7 его ствола по углам места и азимута, установленное на опоре 8. На заданном базовом расстоянии L от гранатомета 1 на треножнике 9 на уровне установки прицела 2 гранатомета 1 установлен дополнительный прицел 10, конструктивно не связанный с гранатометом 1 и снабженный двухкоординатным поворотным устройством 11.
Прицел 2 гранатомета 1 и дополнительный прицел 10 содержат датчики углов места и азимута соответственно 12 и 13 и выполнены с возможностью формирования телевизионного сигнала, причем прицел 2 и дополнительный прицел 10 могут быть выполнены телевизионными, тепловизионными или двухканальными. В последнем случае один из каналов выполняется телевизионным, а другой канал - тепловизионным.
Блок управления 14 содержит вычислительное устройство 15 и электрически соединенные с ним видеомонитор 16, блок ввода данных и команд управления, выполненный в виде джойстика 17 и клавиатуры, 18 и мультиплексор 19. Вычислительное устройство 15 электрически соединено с видеомонитором 16 через мультиплексор 19.
Выходы телевизионного сигнала прицелов 2 и 10 электрически соединены со входами телевизионного сигнала данных прицелов в вычислительном устройстве 15. Выходы датчиков углов места и азимута 12 и 13 прицелов 2 и 10 электрически соединены со входами вычислительного устройства 15 ввода данных о положении в пространстве данных прицелов. Выход датчика углов места и азимута 6 ствола гранатомета 1 электрически соединен со входом вычислительного устройства 15 ввода данных о положении в пространстве ствола данного гранатомета 1. Входы двухкоординатных поворотных устройств 3 и 11 прицелов 2 и 10 электрически соединены с выходами управления вычислительного устройства 15 положением в пространстве данных прицелов. Вход двухкоординатного поворотного устройства 7 ствола гранатомета 1 электрически соединен с выходом управления вычислительного устройства 15 положением ствола данного гранатомета 1. Вычислительное устройство 15 содержит программное обеспечение, образующее в совокупности с аппаратными средствами систему захвата и сопровождения цели 20.
Установка для стрельбы снабжена также датчиком штрих-кода 21 боеприпаса, установленным, например, на стволе гранатомета 1. Выход датчика штрих-кода 21 боеприпаса электрически соединен со входом вычислительного устройства 15 ввода данных о типе боеприпаса.
Гранатомет 1 вместе с прицелом 2, двухкоординатным поворотным устройством 7 ствола гранатомета 1 и опорой 8 могут быть установлены на автомобильном шасси (не показано). Установка для стрельбы снабжена также источником электропитания всех ее составных частей и аккумуляторной батареей (не показаны).
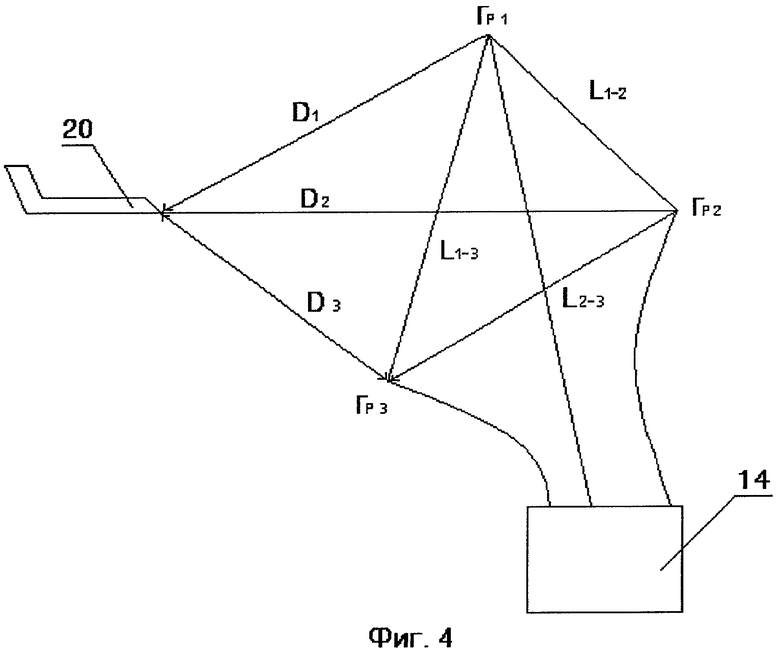
В варианте выполнения, который условно можно назвать ручным, установка для стрельбы по скоростным воздушным целям может включать в себя группу ручных гранатометов 1 (например, три) с гранатометчиками Гр1, Гр2, Гр3 и блок управления 14 с командиром (фиг.4).
Каждый из гранатометов 1 имеет прицел 2 (фиг.2), закрепленный на двухкоординатном поворотном устройстве 3, установленном на стволе гранатомета 1, минимонитор 4, закрепленный на каске 5 гранатометчика. Вход каждого из минимониторов 4 электрически соединен с выходом телевизионного сигнала вычислительного устройства 15 для данного минимонитора 4. На стволе гранатомета 1 закреплен также датчик углов места и азимута 6 оси ствола гранатомета 1. Прицел 2 гранатомета 1 содержит датчик углов места и азимута 12 прицела 2.
Блок управления 14 содержит вычислительное устройство 15, видеомонитор 16, пульты управления, один для каждого из гранатометов 1, выполненные в виде джойстиков 17, клавиатуру 18 и мультиплексор 19. Вход каждого из джойстиков 17 электрически соединен с выходом управления данным джойстиком в вычислительном устройстве 15.
Выходы телевизионного сигнала прицелов 2 гранатометов 1 электрически соединены со входами телевизионного сигнала прицелов 2 в вычислительном устройстве 15.
Входы двухкоординатных поворотных устройств 3 прицелов 2 электрически соединены с выходами управления вычислительного устройства 15 положением в пространстве данных прицелов. Выходы датчиков углов места и азимута 12 прицелов 2 электрически соединены со входами вычислительного устройства 15 ввода данных о положении в пространстве данных прицелов 2.
Гранатометы 1 гранатометчиками расположены в определенном порядке на заданных базовых расстояниях друг от друга L1-2, L2-3, L1-3. Порядок расположения гранатометов 1 и базовые расстояния между ними L1-2, L2-3, L1-3 введены в вычислительное устройство 15. Установка для стрельбы снабжена также источником питания и аккумуляторной батареей (не показаны).
Установка для стрельбы по скоростным низколетящим целям работает следующим образом.
Для поражения воздушной цели 20 стволу гранатомета 1 требуется придать в момент выстрела такое положение в пространстве, при котором граната прошла бы точку Ау (фиг.1), лежащую впереди цели 20 на пути ее движения (упрежденную точку, точку встречи), при времени движения цели 20 до точки встречи Ау, равном времени полета гранаты. В данном случае, с целью упрощения, определение упрежденной точки Ау при стрельбе по скоростным низколетящим целям 20 из гранатомета 1 основывается на предположении, что за время полета граната до упрежденной точки Ау движется прямолинейно, а цель 20 движется равномерно и прямолинейно. Однако предлагаемая установка для стрельбы при вводе в вычислительное устройство 15 дополнительных данных о снаряде и условиях его полета может поражать цель 20 и по баллистическим траекториям. Для автоматического ввода в вычислительное устройство 15 данных о применяемом боеприпасе боеприпас имеет штрих-код, а установка для стрельбы снабжена датчиком штрих-кода 21 боеприпаса.
Положение цели 20 в момент выстрела определяется дальностью до цели D0, углом азимута α0, углом места ϕ0, при этом цель 20 летит со скоростью V, курсовым углом q и углом пикирования (кобрирования) λ.
По этим исходным данным, а также времени полета гранаты до цели 20 вычислительное устройство 15 определяет положение ствола гранатомета 1 в момент выстрела, а именно упрежденный угол азимута αу и упрежденный угол места ϕу.
Дальность до цели 20 определяют методом внутрибазовой дальнометрии. Для реализации данного метода осуществляют захват и сопровождение цели 20 несколькими прицелами. В стационарном варианте это могут быть прицел 2, установленный на стволе гранатомета 1, и дополнительный прицел 10, установленный на треножнике 9. Зная величину отрезка прямой линии, соединяющего оба прицела L (фиг.3), который называют «базой», и величину углов β и δ между «базой» и линиями прицеливания обоих прицелов, определяют величины других сторон треугольника, в одной из вершин которого находится цель 20. По величинам полученных сторон треугольника вычислительное устройство 15 определяет дальность до цели D0.
Угол азимута цели α0 и угол места цели ϕ0 определяются по положению оси прицела 2 гранатомета 1 в момент прицеливания.
Скорость движения цели V, ее курсовой угол q и угол пикирования (кобрирования) λ определяют исходя из скорости и направления перемещения изображения цели 20 в кадре.
В первом стационарном варианте использования все операции по захвату и сопровождению цели 20 осуществляются в автоматическом режиме.
При использовании мультиплексора 19 видеоизображение, формируемое дополнительным прицелом 10, воспроизводится в правой части экрана видеомонитора 16, а видеоизображение, формируемое прицелом 2, воспроизводится в левой части экрана видеомонитора 16.
Кроме того, в правой части экрана видеомонитора 16 формируется перекрестье, отражающее по данным датчика углов места и азимута 13 положение в пространстве оси дополнительного прицела 10, в левой части экрана видеомонитора 16 формируется перекрестье, отражающее по данным датчика углов места и азимута 12 положение в пространстве оси прицела 2, и метка, например круг, отражающая по данным датчика углов места и азимута 6 положение в пространстве оси гранатомета 1.
В процессе отражения воздушной атаки оператор, например, через дополнительный прицел 10 осуществляет обзор воздушного пространства.
При обнаружении и опознавании воздушной цели 20 оператор с помощью джойстика 17 совмещает перекрестье правой части экрана видеомонитора 16 с изображением цели 20 и отдает команду системе на захват и сопровождение цели 20 дополнительным прицелом 10. Двухкоординатное поворотное устройство 11 дополнительного прицела 10 в соответствии с данной командой осуществляет изменение положения дополнительного прицела 10 в пространстве.
Затем оператор переключает джойстик 17 на режим управления прицелом 2 гранатомета 1 и путем его поворота по двум осям координат с помощью двухкоординатного поворотного устройства 3 осуществляет обнаружение и опознавание цели 20 с помощью прицела 2. После обнаружения и опознавания воздушной цели 20 оператор с помощью джойстика 17 совмещает перекрестье левой части экрана с изображением цели 20 и отдает команду системе на захват и сопровождение цели прицелом 2.
Двухкоординатное поворотное устройство 3 прицела 2 в соответствии с данной командой осуществляет изменение положения прицела 2 в пространстве в соответствии с изменением положения цели 20.
В процессе сопровождения цели 20 вычислительное устройство 15, используя метод внутрибазовой дальнометрии, в режиме реального времени определяет текущие значения дальности D0 до цели 20 и, кроме того, величину и направление вектора скорости V цели 20, характер будущего движения цели 20 за время полета гранаты до упреждающей точки Ay. По полученным данным вычислительное устройство 15 определяет текущие значения упрежденного угла азимута αу и упрежденного угла места ϕу ствола гранатомета 1. В соответствии с полученными значениями текущих значений упрежденного угла азимута αу и упрежденного угла места ϕу ствола гранатомета 1 вычислительное устройство 15 формирует в левой части экрана видеомонитора 16 изображение упрежденной точки Ау. Затем оператор переключает джойстик 17 на режим управления стволом гранатомета 1, совмещает метку-круг с изображением упрежденной точки Ay. Двухкоординатное поворотное устройство 7 ствола гранатомета 1 в соответствии с данной командой осуществляет изменение положения ствола гранатомета 1 в пространстве. В определенный момент времени оператор осуществляет выстрел.
Во втором ручном варианте при использовании ручных гранатометов 1 гранатометчики Гр1, Гр2, Гр3 (фиг.4) с помощью прицелов 2 гранатометов 1 и минимониторов 4, закрепленных на касках 5, наблюдают за воздушным пространством.
Гранатометы 1 с гранатометчиками Гр1, Гр2, Гр3 расположены в определенном порядке на заданных базовых расстояниях друг от друга L1-2, L2-3, L1-3. Порядок расположения гранатометов 1 и базовые расстояния L1-2, L2-3, L1-3 между их прицелами 2 введены в вычислительное устройство 15.
Экран видеомонитора 16, с использованием мультиплексора 19, разделен на три части (по числу гранатометов), на каждой из которых воспроизводится видеоизображение, формируемое прицелом 2 одного из гранатометов 1, а именно все цели 20, попавшие в каждый данный момент времени в поле зрения прицела 2 каждого из гранатометов 1, и, кроме того, в каждой из частей экрана видеомонитороа 16 формируется перекрестье, отражающее положение в пространстве оси данного прицела 2, и метка, например круг, отражающий положение в пространстве оси данного гранатомета 1. На экране каждого из минимониторов 4 дублируется видеоизображение одной из частей экрана видеомонитора 16.
Каждая цель 20 на экране видеомонитора 16 и минимониторов 4 помечается, например, определенным цветом. Командир выбирает одну из целей 20 и отдает команду гранатометчикам на ее захват и сопровождение. Гранатометчики Гр1, Гр2, Гр3 с помощью джойстиков 17 совмещают перекрестье экранов своих минимониторов 4 с изображением выбранной цели 20 и отдают команду системе на ее захват и сопровождение прицелами 2 своих гранатометов 1.
В процессе сопровождения цели 20 вычислительное устройство 15, используя метод внутрибазовой дальнометрии, в режиме реального времени определяет текущие значения дальностей D1, D2, D3 до цели 20 и, кроме того, величину и направление вектора скорости V цели, характер будущего движения цели за время полета гранаты до упреждающей точки Ау. По полученным данным вычислительное устройство 15 определяет текущие значения упрежденного угла азимута αу и упрежденного угла места ϕу стволов каждого из гранатометов 1.
В соответствии с полученными значениями текущих значений упрежденного угла азимута αу и упрежденного угла места ϕу ствола каждого из гранатометов 1 вычислительное устройство 15 формирует в каждой из трех частей экрана видеомонитора 16 и соответственно на экранах каждого из минимониторов 4 свое изображение упрежденной точки Ау.
Каждый из гранатометчиков Гр1, Гр2, Гр3, вручную, перемещая ствол своего гранатомета 1 в вертикальной и горизонтальной плоскостях, совмещают метку-круг на экране своего минимонитора 4 с изображением упрежденной точки Ау и в определенный момент времени по команде командира осуществляют выстрел.
Небольшие габариты и вес предлагаемой установки для стрельбы по скоростным низколетящим целям в совокупности с наличием системы захвата и сопровождения цели позволяют при обеспечении высокой точности стрельбы разместить ее в чрезвычайно удобных для целей противовоздушной обороны местах, что и подтверждает обеспечение достижения технического результата, а именно расширение зон использования установок для стрельбы по скоростным низколетящим воздушным целям при сохранении высокой эффективности стрельбы.
Определение дальности до цели способом, исключающим какое-либо излучение, устраняет возможность обнаружения установки для стрельбы противником до осуществления выстрела. Кроме того, значительно снижаются экономические затраты на создание средств защиты наземных объектов от средств воздушного нападения.
Источники информации
1. Фитилев Б.Н. Прицеливание установок. Приборы наземной навигации ВолгГТУ, Волгоград, 2003, стр.85-90.
2. Патент РФ №2218544, кл. МПК F 41 H 7/02, F 41 G 5/14.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| Боевой модуль с дистанционным управлением | 2018 |
|
RU2686896C1 |
| ПРИЦЕЛЬНЫЙ КОМПЛЕКС БОЕВОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2294514C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |

Изобретение относится к области вооружения и военной техники, в частности к области защиты наземных объектов от средств воздушного нападения. Техническим результатом изобретения является расширение зон использования установок для стрельбы по скоростным низколетящим целям при сохранении высокой эффективности стрельбы, а также устранение возможности их обнаружения противником до осуществления выстрела. Установка для стрельбы по скоростным воздушным целям включает оружие, обзорно-прицельную систему и блок управления, включающий вычислительное устройство и электрически соединенные с ним блок ввода данных и команд управления и видеомонитор, а также источник питания. Согласно изобретению в качестве оружия установка содержит, по крайней мере, один гранатомет, блок управления снабжен мультиплексором, а обзорно-прицельная система включает, по крайней мере, два установленных на заданном базовом расстоянии друг от друга и выполненных с возможностью формирования телевизионного сигнала прицела. Каждый из прицелов снабжен двухкоординатным поворотным устройством и датчиком углов места и азимута его оптической оси, кроме того, по крайней мере, один из них конструктивно связан со стволом гранатомета. Каждый из гранатометов имеет датчик углов места и азимута оси его ствола. В стационарном варианте выполнения устройства гранатомет установлен на опоре и имеет двухкоординатное поворотное устройство его ствола по углам места и азимута, причем вход двухкоординатного поворотного устройства ствола гранатомета электрически соединен с выходом управления вычислительного устройства положением ствола данного гранатомета. В ручном варианте выполнения установка для стрельбы содержит, по крайней мере, два выполненных в ручном варианте и расположенных на заданных базовых расстояниях друг от друга гранатомета, каждый из которых имеет прицел, конструктивно связанный с его стволом, и минимонитор, вход которого электрически соединен с выходом телевизионного сигнала вычислительного устройства для данного минимонитора, причем блок ввода данных и команд управления включает для каждого гранатомета пульт управления, вход которого электрически соединен с выходом управления данным пультом в вычислительном устройстве. 8 з.п. ф-лы, 4 ил.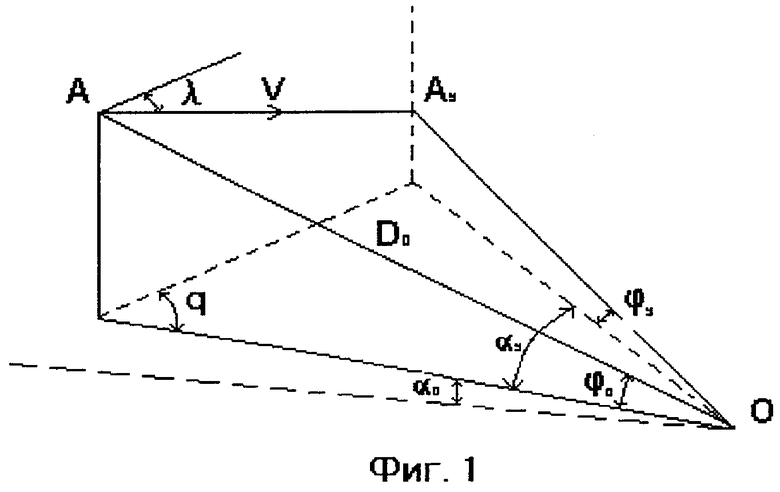
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| Дражеровочный котел | 1930 |
|
SU21653A1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| БОЕВАЯ МАШИНА | 1996 |
|
RU2108532C1 |
| DE 3103919 A1, 02.05.1985 | |||
| Аза-арил-1Н-пиразол-1-ил-сульфонамиды | 2013 |
|
RU2627268C2 |
| US 5062586 A, 05.11.1991. | |||

