Изобретение относится к области вооружения и военной техники, в частности к защите боевой машины (БМ) от средств воздушного нападения (СВН), например, с помощью пулеметных (пушечных) установок.
Известен способ стрельбы БМ, заключающийся в обнаружении и опознавании цели, захвате цели на сопровождение, сопровождении цели прицельно-навигационной системой с выдачей необходимых параметров в бортовой вычислитель, определении угловых поправок стрельбы соответственно в вертикальном и горизонтальном каналах α и β из соотношений
α *=α 0(Dy),
β *=ω цτ-z,
α =α *-β sinγ ,
β =β *+α sinγ ,
Dy=Dy(D, Δ TB, Δ v0, Δ TЗ, Δ H)
где α - угол прицеливания;
β - угол крена;
tпол - полетное время снаряда на дальность;
ω ц - относительная угловая скорость движения цели в горизонтальной плоскости;
Dy, D - соответственно упрежденная и текущая дальность до цели;
z - поправка на деривацию;
Δ TB, Δ TЗ, Δ H - отклонение соответственно температуры воздуха и заряда, давления воздуха от нормального;
Δ v0 - отклонение начальной скорости снаряда от номинального значения,
отработке этих поправок силовыми приводами пулеметной (пушечной) установки (ПУ) и стрельбе по цели /1/.
Для реализации этого способа существует подсистема, включающая прицельно-навигационную систему, бортовой аналоговый вычислитель, силовые привода, пулеметную (пушечную) установку /2/.
Недостатком этого способа и реализующей его системы является большая систематическая ошибка при стрельбе по скоростным, в частности воздушным целям, обусловленная неучетом в стрельбовом алгоритме угловой скорости линии визирования в вертикальной плоскости, неучетом скорости сближения цели с носителем.
Кроме того, при существующей приборной реализации прицелов, в частности прицела 1К13-2 /2/, сопроводительная стрельба в ближней зоне невозможна из-за ограничений по угловой скорости линии визирования (ω max=3-6 град/с) и ограничений по углу прокачки линии визирования в вертикальной плоскости (ε <30° ).
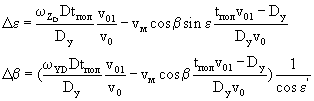
Поэтому наиболее близким техническим решением, выбранным в качестве прототипа, является способ стрельбы БМ по целям, включающий обнаружение и опознавание цели, сопровождение с определением координат и параметров цели, определение угловых поправок на движение цели и носителя из математических выражений и отклонение во время стрельбы в соответствии с вычисленными поправками ствола ПУ /3/.
Для реализации этого способа на БМ известна система огневой защиты, которая содержит обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую в свой состав устройство определения углов упреждения, содержащее, в свою очередь, блок формирования угла упреждения Δ β , блок формирования угла упреждения Δ ε , блок формирования упрежденной дальности Dy, блок формирования полетного времени tпол, блок формирования абсолютной начальной скорости v01, блок формирования скорости сближения  , а также силовые приводы установки, пулеметную или пушечную установку.
, а также силовые приводы установки, пулеметную или пушечную установку.
Недостатком приведенного способа и реализующей его системы является снижение точности стрельбы из-за резкого нарастания систематической ошибки стрельбы в ближней зоне стрельбы, в особенности при обстреле высокоскоростной цели, при пролете ее на значительных параметре и высоте.
Задачей предлагаемого способа и реализующей его системы является повышение точности и соответственно эффективности стрельбы БМ по высокоскоростным, в частности воздушным целям, в особенности в ближней зоне стрельбы.
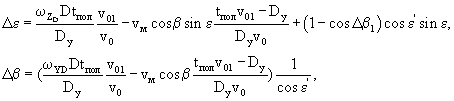
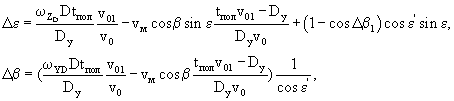
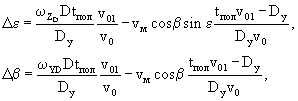
Поставленная задача решается тем, что в известном способе защиты БМ от СВН, включающем обнаружение и опознавание цели, сопровождение с определением координат и параметров цели, определение угловых поправок на движение цели и носителя из математических выражений и отклонение во время стрельбы в соответствии с вычисленными поправками ствола пушечной установки (ПУ), согласно изобретению дополнительно перед вычислением угловых поправок определяют отклонение стволов ПУ от плоскости башни в вертикальной плоскости ε ', определяют рассогласование положения стволов ПУ и линии визирования в горизонтальной плоскости прицельной системы координат ХDYDZD Δ β 1, а требуемые угловые поправки на движение цели и БМ соответственно в вертикальной и горизонтальной плоскостях прицельной системы координат определяют на момент выстрела из соотношений
где D, Dy - соответственно текущая и упрежденная дальность до цели, м;
ω YD, ω ZD - угловая скорость линии визирования относительно соответственно вертикальной (OYD) и горизонтальной (OZD) оси прицельной системы координат;
tпол - полетное время снаряда, с;
v0, v01 - соответственно относительная и абсолютная начальная скорость снаряда, м/с;
vм - скорость БМ, м/с;
β , ε - углы визирования цели соответственно в горизонтальной и вертикальной плоскостях связанной с носителем системы координат, рад;
и отклоняют во время стрельбы в соответствии с вычисленными на момент выстрела поправками стволы ПУ относительно линии визирования.
Поставленная задача решается также тем, что после определения угловых поправок Δ ε , Δ β определяют погрешность их вычисления из соотношений
δ Δ β =| Δ β -arcsinΔ β | ,
δ Δ ε =| Δ ε -arcsinΔ ε | ,
сравнивают с допустимой погрешностью и в случае превышения ее по любому из каналов определяют угловую поправку по соответствующему каналу из соотношений
Δ β =arcsinΔ β
Δ ε =arcsinΔ ε .
Поставленная задача решается также тем, что в известную систему для стрельбы БМ по скоростной цели, содержащую обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую в свой состав устройство определения углов упреждения, содержащую, в свою очередь, блок формирования угла упреждения Δ β , блок формирования угла упреждения Δ ε , блок формирования упрежденной дальности Dy, блок формирования полетного времени tпол, блок формирования абсолютной начальной скорости v01, блок формирования скорости сближения  , а также силовые привода установки, пулеметную или пушечную установку, согласно изобретению в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки ε попр, причем первый его вход соединен со вторым выходом обзорно-прицельной системы, а его второй и третий входы - соответственно с выходом блока формирования угла упреждения Δ β и выходом блока формирования угла упреждения Δ ε , а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δ ε .
, а также силовые привода установки, пулеметную или пушечную установку, согласно изобретению в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки ε попр, причем первый его вход соединен со вторым выходом обзорно-прицельной системы, а его второй и третий входы - соответственно с выходом блока формирования угла упреждения Δ β и выходом блока формирования угла упреждения Δ ε , а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δ ε .
Поставленная задача решается также тем, что согласно изобретению блок вычисления угловой поправки ε попр выполнен в виде последовательно соединенных первого сумматора (СУM1), первого косинусного преобразователя, первого (МУ1) и второго (МУ2) множительных устройств, причем второй вход МУ1 соединен с выходом СУМ2, вход которого соединен с инверсным выходом второго косинусного преобразователя, вход которого соединен с выходом блока формирования угла упреждения Δ β , второй вход МУ2 соединен с выходом синусного преобразователя, вход которого, а также второй вход СУМ1 соединены со вторым выходом прицельно-навигационной системы.
Поставленная задача решается также тем, что в известную систему для стрельбы БМ по скоростной цели, содержащую обзорно-прицельную, навигационную системы, бортовую вычислительную систему, включающую в свой состав устройство определения углов упреждения, содержащее, в свою очередь, блок формирования угла упреждения Δ β , блок формирования угла упреждения Δ ε , блок формирования упрежденной дальности Dy, блок формирования полетного времени tпол, блок формирования абсолютной начальной скорости v01, блок формирования скорости сближения  , а также силовые привода установки, пулеметную или пушечную установку, согласно изобретению в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки ε попр, причем первый-второй его входы соединены соответственно с первым-вторым выходами обзорно-прицельной системы, а его третий и четвертый входы - с выходами силовых приводов соответственно горизонтального и вертикального наведения, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δ ε .
, а также силовые привода установки, пулеметную или пушечную установку, согласно изобретению в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки ε попр, причем первый-второй его входы соединены соответственно с первым-вторым выходами обзорно-прицельной системы, а его третий и четвертый входы - с выходами силовых приводов соответственно горизонтального и вертикального наведения, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δ ε .
Именно организованная таким образом стрельба с помощью предлагаемых систем обеспечивает согласно способу повышение точности стрельбы по скоростной, в частности воздушной цели, при расширении условий боевого применения в части повышения скоростей СВН, параметров и высот их пролета относительно БМ и связанной с этим обстоятельством необходимости расширения зон возможной стрельбы БМ как в дальней, так и в ближней зоне.
Тем самым достигается цель изобретения. Это позволяет сделать вывод о том, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сопоставительный анализ заявленных решений с прототипами показывает, что заявляемый способ отличается от известного тем, что дополнительно перед вычислением угловых поправок определяют отклонение стволов ПУ от плоскости башни в вертикальной плоскости ε ', определяют рассогласование положения стволов ПУ и линии визирования в горизонтальной плоскости прицельной системы координат XDYDZDΔβ 1, а требуемые угловые поправки на движение цели и БМ соответственно в вертикальной и горизонтальной плоскостях прицельной системы координат определяют на момент выстрела из соотношений
Анализ соответствующей литературы /3, 4/ показывает, что первый разворот системы координат Xv0Yv0Zv0 на угол β '=β +Δ β производится в системе координат (с.к.) носителя, в плоскости ХHYHZH, фиг.1. И угол Δ β находится также в плоскости XHOZH. Реальный же разворот ствола оружия ОХv0 происходит в прицельной с.к. в некоторой плоскости ХDОХ , наклоненной к горизонтальной плоскости носителя XHOZH на угол ε .
, наклоненной к горизонтальной плоскости носителя XHOZH на угол ε .
Этот фактор начинает сказываться при увеличении высоты пролета цели Н, особенно в ближней зоне на малых дальностях D ( ).
).
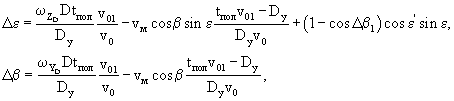
На фиг.2 и 3 для сравнения приведены зависимости промаха в картинной плоскости стрельбы соответственно в горизонтальной rz и вертикальной rу плоскости, а также вдоль направления стрельбы rх, получаемые при расчете угловых поправок Δ β , Δ ε по исходной зависимости (см. прототип) и при введении операции деления на cosε '.
Как следует из фиг.2-3, боковой промах rz, составлявший на D=1200-1000 м 11-16 м, практически устраняется.
По аналогии с вышесказанным разворот стволов оружия в вертикальной плоскости в с.к. носителя осуществляется на угол ε '=ε +Δ ε , т.е. в плоскости  . Реальный же разворот стволов в процессе сопровождения и стрельбы осуществляется в прицельной с.к. XDYDZD в плоскости
. Реальный же разворот стволов в процессе сопровождения и стрельбы осуществляется в прицельной с.к. XDYDZD в плоскости  . Очевидно, плоскости
. Очевидно, плоскости  и
и  в общем случае не совпадают, т.к.
в общем случае не совпадают, т.к. 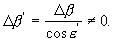
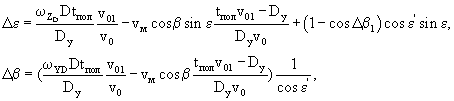
Поэтому возникает необходимость во введении корректирующей добавки в угловую поправку Δ ε доб=(1-cosΔ β )cos(ε +Δ ε )sinε .
И угловую поправку в вертикальном канале следует записать в виде 
причем ε ’=ε +Δ ε .
Однако введение поправки Δ ε доб при расчете Δ ε автоматически приводит к решению системы двух алгебраических уравнений, причем первое из них задано в неявном виде
Δ ε =Δ ε (Δ β , Δ ε ... ),
Δ β =Δ β (Δ ε ... )
и переводит решение в общем случае в класс итерационных задач.
Причем в процессе решения уже используются получаемые итерационным способом значения упрежденной дальности Dy и полетного времени tпол.
Практическим выходом из этой ситуации может быть измерение отклонения ствола ПУ от плоскости башни в вертикальной плоскости ε ' с помощью датчика положения ДП /2, стр. 17, 18/, а также измерение рассогласования положения ствола ПУ и линии визирования в горизонтальной плоскости прицельной системы координат Δ β с помощью датчика угла (ДУ) /2, стр.17-18/.
Кроме того, поскольку расчеты по стрельбовому алгоритму ведутся с высокой тактовой частотой, то можно использовать при расчете i -ого значения Δ β , Δ ε соответствующие (i-1)- ые их значения.
Поэтому далее везде значения Δ β , стоящие в правой части уравнения, будем обозначать с индексом Δ β 1. Это имеет смысл ухода от итерационного счета. Для вычисления поправки, например Δ β , используются текущие значения рассогласования Δ β , обозначаемые далее Δ β 1. А получены они могут быть либо с соответствующих датчиков, уже имеющихся в системе, например в БМП-3 - ДУ и ДП, (стр. 17-18 /2/), либо с предыдущего такта счета.
Эффект от учета этой добавки можно оценить, сравнивая фиг.2 и 4. Наблюдается снижение примерно в 2-3 раза систематической (методической) ошибки; по вертикальному каналу: на Dy=800 м rу снижается с 8 до 3 м, на Dy=1200 м - с 2 до 1,2 м.
Однако при этом следует заметить, что такое уточнение целесообразно, если одновременно будет уточнена и поправка по Δ β  см. фиг.5.
см. фиг.5.
И, наконец, дальнейшее уточнение угловых поправок Δ β , Δ ε можно осуществить, беря от них функцию arcsin-Δ β → arcsinΔ β , Δ ε → arcsinΔ ε .
На фиг.5 приведены систематические или методические ошибки вычисления угловых поправок после введения соответствующих уточнений в Δ β , Δ ε , заявляемых в п.1 формулы изобретения.
Промахи сравнительно невелики и возрастают к пролету не более чем до 2-2,5 м (в горизонтальном канале), кривые 1. Однако они могут существенно возрасти при увеличении значения самих Δ β и Δ ε при возрастании скорости цели, например до vц=300 м/с, см. пунктирные кривые, при увеличении параметра и высоты пролета, например до р=1000 м, Н=1000 м, см. штрихпунктирные кривые.
Введением же операции arcsinΔ β , arcsinΔ ε методическая ошибка устраняется вовсе: rx, rу, rz=0.
Однако такое уточнение целесообразно вводить, оценив предварительно допускаемую методическую ошибку при его неучете δ β ,ε=|Δ β (Δ ε )-arcsinΔ β (Δ ε )| и сравнив эту ошибку с допустимой в данном случае ошибкой δ β ,ε.
И если δ β ≥ δ β дoп, то определяют уточненные значения угловых поправок Δ β =arcsinΔ β .
Аналогично и для Δ ε .
Пересмотр и уточнение алгоритма расчета кинематических угловых поправок обусловлены следующими обстоятельствами:
- расширение условий боевого применения артиллерийского вооружения, используемого для защиты от СВН, в части увеличения скорости, курсового параметра р и высоты Н пролета целей, которые подлежат обстрелу;
- связанное с этим расширение зон возможной стрельбы, требующее увеличения углов прокачки линии визирования, максимальных значений угловой скорости линии визирования (в БМП-3 ε mах=30° , в БМП-4 ε max=60° ), максимальных значений угловой скорости линии визирования (в БМП-3 ω max=5-6° /c, в БМП-4 ω max=20° /c).
На фиг.6 представлены зоны возможной стрельбы БМП-3 и БМП-4.
В пользу увеличения параметра и высоты пролета целей, которые следует обстреливать БМ, говорит наметившаяся тенденция создания автоматизированных систем управления боевых подразделений. Это позволит в случае необходимости осуществлять скоординированный одновременный обстрел наиболее опасных целей с нескольких БМ.
Сравнение заявляемых технических решений с прототипами позволяет установить соответствие критерию “новизна”.
Анализ известных способов защиты объектов от СВН в данной области техники не позволил выявить в них совокупность признаков, отличающих заявляемое решение от прототипа.
Отдельные операции, входящие в заявляемый способ, широко известны. Однако при их введении в способ в указанной последовательности (связи) по предлагаемым соотношениям достигается желаемый эффект - повышение точности и эффективности стрельбы по воздушным целям.
При изучении технических решений в других областях техники признаки, отличающие заявляемое изобретение - систему стрельбы БМ по скоростной воздушной цели, также не были выявлены.
Это позволяет сделать вывод о соответствии предлагаемых решений критериям новизны и изобретательского уровня.
На фиг.1 показана ориентация визирной с.к. ХDYDZD и с.к., связанной с подвижной артиллерийской установкой Xv0Yv0Zv0, относительно связанной с носителем с.к. XHYHZH.
На фиг.2 приведены зависимости проекций систематической ошибки r(rx, rу, rz) от упрежденной дальности Dy при определении угловых поправок по зависимостям
Стрельба осуществляется ПУ по горизонтально летящей цели со скоростью vц=200 м/с на высоте Н=500 м и курсовом параметре р=500 м. Начальная скорость снаряда v0=980 м/с. Скорость носителя БМ vм=10 м/с.
На фиг.3 приведены зависимости проекций систематической ошибки r(rx, rу, rz) от упрежденной дальности Dy при введении деления Δ β на cosε ', т.е. при определении угловых поправок по зависимостям
На фиг.4 приведены зависимости проекций систематической ошибки r(rx, rу, rz) от Dy при введении поправки в Δ ε , т.е. при определении угловых поправок по зависимостям
На фиг.5 приведены зависимости проекций систематической ошибки r(rx, rу, rz) от Dy при введении рассматриваемых поправок по обоим каналам по зависимостям
Как следует из графиков, систематическая ошибка к моменту пролета цели (vц=200 м/с, р=Н=500 м) относительного носителя (БМ) не превышает ≈ 1-2 м.
Однако систематическая ошибка может существенно возрасти при увеличении скорости цели (см. пунктирные линии для vц=300 м/с и при увеличении курсового параметра и высоты пролета цели (см. штрихпунктирную линию для vц=300 м/с и р=Н=1000 м).
Введение в зависимости для Δ β , Δ ε операции arcsin (arcsin β , arcsin ε ) сводит окончательно систематические ошибки, обусловленные методическими ошибками алгоритма, в рассматриваемых условиях боевого применения, а также при отсутствии методических ошибок входных параметров алгоритма к нулю.
На фиг.6 представлены зоны поражения пушечным вооружением БМ воздушной цели, летящей со скоростью vц=200 м/с. СУ БМ соответствует БМ типа БМП-3 (максимальная угловая скорость ω mах=6 град/с, предельный угол прокачки линии визирования ε пред=30° ) и перспективной БМП (ω mах=20 град/с, ε пред=60° ).
Таким образом, снятие или смягчение ограничений, вносимых СУ перспективных БМ, предъявляет новые требования к алгоритму стрельбы в части его универсализации, расширения условий боевого применения.
На фиг.7 (7а и 7б, на 2-ух листах) представлены функциональная схема системы стрельбы БМ по цели и место в ней заявляемого блока вычисления угловой поправки в Δ ε -ε попр (пункты 3, 4 формулы изобретения).
На фиг.8 представлена структурная схема блока вычисления угловой поправки ε попр.
На фиг.9 (9а и 9б, на 2-ух листах) представлены функциональная схема системы стрельбы БМ по цели (вариант реализации) и место в ней заявляемого блока вычисления угловой поправки в Δ ε -ε попр (пункт 5 формулы изобретения).
Для подтверждения технической реализуемости заявляемого способа (и соответствующей системы) ниже приведен пример работы.
После взятия на сопровождение атакующей воздушной цели типа самолета (или вертолета) из обзорно-прицельной системы 1 в вычислительную систему (ВС) поступают непрерывно сигналы об углах визирования цели β и ε и угловых скоростях ω yD, ω ZD соответственно в двух плоскостях системы координат, связанной с носителем ХHYHZH, а также дискретные замеры дальности  . С навигационной системы в ВС поступают также данные о носителе: скорость носителя, углы тангажа, крена и т.д.
. С навигационной системы в ВС поступают также данные о носителе: скорость носителя, углы тангажа, крена и т.д.
Предварительно в ВС введены данные об оружии (баллистический коэффициент, относительная начальная скорость снаряда), а также данные о внешней среде.
На основании полученной информации в устройстве определения углов упреждения Δ β и Δ ε рассчитываются кинематические поправки, обусловленные движением цели и носителя -Δ β и Δ ε - соответственно в горизонтальной и вертикальной плоскостях прицельной системы координат XDYDZD.
Для этого предварительно определяется скорость сближения цели с носителем  в блоке формирования скорости сближения
в блоке формирования скорости сближения  , вычисляется абсолютная начальная скорость снаряда v01 в блоке формирования абсолютной начальной скорости снаряда из математического выражения, например
, вычисляется абсолютная начальная скорость снаряда v01 в блоке формирования абсолютной начальной скорости снаряда из математического выражения, например

где v0 - относительная начальная скорость снаряда, м/с,
vн - скорость носителя (БМ), м/с,
β , ε - угол визирования цели соответственно в горизонтальной и вертикальной плоскости в связанной с носителем системе координат, рад
после чего находят время полета снаряда tпол и упрежденную дальность Dy
сн=сН(Н),
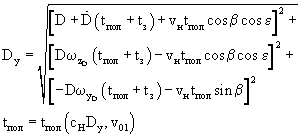
где с - баллистический коэффициент снаряда, м /кгс,
Н(Н) - относительная плотность воздуха,
D, Dy - соответственно текущая и упрежденная дальность до цели, м,
 - скорость сближения цели и носителя, м/с,
- скорость сближения цели и носителя, м/с,
ω zD, ω yD - угловая скорость линии визирования относительно соответственно вертикальной (OYD) и горизонтальной (OZD) оси прицельной с.к. XDYDZD, 1/с,
tЗ - время задержки (время между последним замером координат и параметров цели и выстрелом), с.
Кроме того, в ВС вычисляются остальные поправки, в частности, на базу (параллакс), понижение снаряда под действием силы тяжести (угол прицеливания), деривацию и т.п.
Достаточно подробно их вычисление приведено в обширной литературе, в частности /3, 5/.
Далее комбинация выработанных поправок (с учетом угла крена) по каждому из каналов поступает на вход силового привода.
Силовые приводы 14 и 15, отрабатывая управляющие сигналы с учетом сигнала обратной связи, в каждый момент времени разворачивают стволы ПУ 16 в нужном направлении.
Использование заявляемого способа и реализующей его системы обеспечит по сравнению с существующими следующие преимущества:
повышение точности стрельбы и отсюда эффективности зенитного огня БМ по высокоскоростным воздушным целям, в особенности в ближней зоне стрельбы;
появляется возможность обстрела наиболее опасной цели одновременно несколькими БМ боевого подразделения;
расширение условий боевого применения артиллерийского вооружения БМ, используемого для защиты от СВН, в части увеличения скорости, курсового параметра и высоты пролета потенциально обстреливаемых целей;
расширение спектра обстреливаемых целей в части уменьшения их размеров.
Источники информации
1. Изделие 1В539. Техническое описание ПБА 3.031.039 ТО Тула, КБП, 1985, стр. 12-16.
2. Комплекс вооружения 2К23 боевой машины пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Тула, КБП, 1991, стр. 1-10.
3. Патент России №2087832 (прототип).
4. Р.В.Мубаракшин, В.М.Балуев. "Прицелы воздушной стрельбы". Учебное пособие, М., издание ВВИА им. проф. Н.Е.Жуковского, 1968.
5. Патент России №2172463.
Изобретение относится к области вооружения и военной техники, в частности к защите боевой машины (БМ) от средств воздушного нападения (СВН), например, с помощью пулеметных (пушечных) установок. Технический результат - повышение точности и, соответственно, эффективности стрельбы БМ по высокоскоростным, в частности воздушным целям, в особенности в ближней зоне стрельбы. Сущность изобретения заключается в том, что в известном способе защиты БМ от СВН, включающем обнаружение и опознавание цели, сопровождение с определением координат и параметров цели, определение угловых поправок на движение цели и носителя из математических выражений и отклонение во время стрельбы в соответствии с вычисленными поправками ствола пушечной установки (ПУ), согласно изобретению дополнительно перед вычислением угловых поправок определяют отклонение стволов ПУ от плоскости башни в вертикальной плоскости ε', определяют рассогласование положения стволов ПУ и линии визирования в горизонтальной плоскости прицельной системы координат XDYDZD Δβ1, а требуемые угловые поправки на движение цели и БМ соответственно в вертикальной и горизонтальной плоскостях прицельной системы координат определяют на момент выстрела из заданных математических выражений. 3 н. и 2 з. п.ф-лы, 9 ил.
где D, Dy - соответственно текущая и упрежденная дальность до цели, м;
 - угловая скорость линии визирования относительно соответственно вертикальной (OYD) и горизонтальной (OZD) оси прицельной системы координат;
- угловая скорость линии визирования относительно соответственно вертикальной (OYD) и горизонтальной (OZD) оси прицельной системы координат;
tпол - полетное время снаряда, с;
v0, v01 - соответственно относительная и абсолютная начальная скорости снаряда, м/с;
vм - скорость БМ, м/с;
β, ε - углы визирования цели соответственно в горизонтальной и вертикальной плоскостях связанной с носителем системы координат, рад;
и отклоняют во время стрельбы в соответствии с вычисленными на момент выстрела поправками стволы ПУ относительно линии визирования.
δΔβ=|Δβ-arcsinΔβ|,
δΔε=|Δε-arcsinΔε|,
сравнивают с допустимой погрешностью и в случае превышения ее по любому из каналов определяют угловую поправку по соответствующему каналу из соотношений
Δβ=arcsinΔβ,
Δε=arcsinΔε
 , а также силовые привода установки, пулеметную или пушечную установку, отличающаяся тем, что в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки εпопр, причем первый его вход соединен со вторым выходом обзорно-прицельной системы, а его второй и третий входы - соответственно с выходом блока формирования угла упреждения Δβ и выходом блока формирования угла упреждения Δε, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δε.
, а также силовые привода установки, пулеметную или пушечную установку, отличающаяся тем, что в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки εпопр, причем первый его вход соединен со вторым выходом обзорно-прицельной системы, а его второй и третий входы - соответственно с выходом блока формирования угла упреждения Δβ и выходом блока формирования угла упреждения Δε, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δε. , а также силовые привода установки, пулеметную или пушечную установку, отличающаяся тем, что в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки εпопр, причем первый-второй его входы соединены соответственно с первым-вторым выходами обзорно-прицельной системы, а его третий и четвертый входы - с выходами силовых приводов соответственно горизонтального и вертикального наведений, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δε.
, а также силовые привода установки, пулеметную или пушечную установку, отличающаяся тем, что в устройство определения углов упреждения бортовой вычислительной системы дополнительно введен блок вычисления угловой поправки εпопр, причем первый-второй его входы соединены соответственно с первым-вторым выходами обзорно-прицельной системы, а его третий и четвертый входы - с выходами силовых приводов соответственно горизонтального и вертикального наведений, а выход - с дополнительно организованным одиннадцатым входом блока формирования угла упреждения Δε.| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |
| 0 |
|
SU159392A1 |

