Изобретение относится к машиностроению, а именно к определению прочностных характеристик материалов деталей машин при усталостном механизме разрушения, а также при деформировании поверхностных слоев материала трением, и может быть использовано для оценки параметров их состояния.
Известны аналогичные способы определения прочностных характеристик материалов [1, 2], заключающиеся в том, что в испытуемый материал внедряют индентор под нагрузкой, измеряют геометрические параметры отпечатков и борозды, а затем определяют прочностные характеристики материала.
Аналогичные способы реализуются отдельным устройством и поэтому пригодны только для определения ограниченного числа характеристик.
Наиболее близко по своей технической сущности в качестве прототипа подходит способ определения прочностных характеристик материала и устройство для его осуществления [3], заключающийся в том, что на подготовленную поверхность образцов индентором наносят царапины, повторяют проходы индентора, оценивают объем материала, вытесненного индентором из поверхностного слоя, затраченную энергию, затем определяют характеристику материала - энергию активации разрушения поверхностного слоя, как отношение затраченной энергии к количеству материала, вытесненного из поверхностного слоя.
Однако прототип ограничен в своих технологических возможностях, так как позволяет определять только определенные характеристики материала, ограниченные устройством.
Заявляемый способ лишен указанного недостатка.
Известны аналогичные устройства для осуществления способа определения прочностных характеристик материала [4, 5], содержащие корпус, индентор, механизм нагружения индентора, колонну, механизм продольного перемещения индентора, оптическую систему, блок обработки информации, командоаппарат, механизм закрепления образца, арретирующий узел.
Аналогичные устройства имеют недостаток: они предназначены для определенных операций, то есть у них ограничены технологические возможности, низкая производительность.
В качестве прототипа по своей технической сущности наиболее близко подходит устройство [6], содержащее корпус, колонну, индентор, механизм нагружения индентора, механизмы продольного и поперечного перемещения индентора, блок обработки информации, командоаппарат. Устройство-прототип позволяет вдавливать инструмент-индентор, наносить на испытуемую поверхность образца царапину и переходить к нанесению следующей царапины, измерять силу вдавливания инструмента-индентора, размеры царапины-борозды, величину высоты наплыва, ширины и глубины царапины. Однако устройство-прототип имеет недостаток. Оно ограничено в своих технологических возможностях. На нем невозможно осуществить все операции согласно заявляемому способу определения прочностных характеристик материала.
Указанный недостаток отсутствует в заявляемом устройстве.
Технический результат настоящего изобретения заключается в расширении технических возможностей, упрощение и ускорение операций.
Технический результат достигается тем, что на подготовленную поверхность образцов инструментом-индентором наносят царапины, повторяют проходы инструмента-индентора, оценивают объем материала, вытесненного инструментом-индентором из поверхностного слоя, затраченную энергию при заданной температуре образца, затем определяют характеристику материала - энергию активации разрушения поверхностного слоя, как отношение затраченной энергии к количеству материала, вытесненного из поверхностного слоя, при этом используют программу выбора вида исследования и его проведения из возможных нескольких автоматически реализуемых на одном и том же устройстве, как профилографирование-профилометрирование шероховатости образца; оценку микротвердости поверхности образца; оценку энергии активации пластической деформации; трибометрирование; прогнозирование остаточного ресурса (по текущему значению либо кинетике изменения энергии активации пластической деформации); профилографирование-профилометрирование волнистости поверхности образца; включают блок обработки информации персонального компьютера, загружают рабочую программу выбора вида исследования и его проведения; поворачивают ручку фиксации инструмента в положение «измерение», отводя кулачком подвеску; обезжиренный и высушенный образец размещают на столике исследуемой поверхностью перпендикулярно оси движения инструмента; устанавливают соответствующий инструмент в державке; вводят требуемые исходные данные и режимы исследования в рабочую программу выбора вида исследования и его проведения; нажимают кнопку «старт» окна рабочей программы выбора вида исследования и его проведения; опускают траверсу с инструментальной головкой до соприкосновения инструмента с исследуемой поверхностью образца, определяя его момент касания по показаниям датчика вертикальных перемещений инструмента; двигателем горизонтального перемещения каретки перемещают каретку на расстояние выхода вершины инструмента из деформированной области исследуемой поверхности до нулевых показаний датчика вертикальных перемещений инструмента; реализуют алгоритм дальнейших действий согласно результату выбора видов исследований. После выбора вида исследований - оценка микротвердости поверхности образца вводят требуемое число измерений, величину нормальной нагрузки; устанавливают инструмент - стандартный алмазный индентор Виккерса (четырехгранную пирамиду с углом при вершине 136°); включают двигатель нагружения; давят на свободный конец плоской пружины датчика нагружения подвески; одновременно строят график зависимости «нормальная нагрузка FN [Н] - величина внедрения инструмента-индентора h [мкм] в исследуемую поверхность» (h=f(FN)); одновременно вычисляют значение микротвердости по формуле 
где tэксп - длительность наработки материала в единицах времени; U0, U0 исх, U0 кр - текущее, исходное, критическое (предельно допустимое) значение энергии активации пластической деформации материала, соответственно; при прогнозировании по кинетике изменения энергии активации пластической деформации строят таблицу исходных данных, содержащих ранее найденные значения энергии активации пластической деформации исследуемого материала и соответствующие им значения наработки; выбирают вид аппроксимации (линейный или нелинейный); с помощью рабочей программы автоматически строят на экране компьютера зависимость в координатах «наработка - энергия активации пластической деформации», аппроксимированную методом наименьших квадратов и горизонтальные прямые, соответствующие начальному и критическому уровню энергии активации пластической деформации материала; определяют автоматически точку пересечения аппроксимированной зависимости с критическим значением энергии активации; значение оси в точке пересечения принимают за прогнозируемое значение наработки материала, соответствующее его разрушению, сохраняют прогнозируемое значение наработки материала в памяти блока обработки информации. После выбора вида исследований - трибометрирование, задают величину нормальной нагрузки, скорость, амплитуду и время перемещения каретки; устанавливают инструмент -сферический индентор в державку; наносят слой смазочного материала на поверхность исследуемого образца; включают автоматически двигатель нагружения; давят на инструмент - сферический индентор нормальной силой до заданной величины с фиксированием датчиком нагружения подвески нормальной силой; включают двигатель продольного перемещения в режиме возвратно-поступательного движения с заданной скоростью, амплитудой и временем испытаний; измеряют силу трения по показаниям датчика тангенциальной силы, нормальную силу, действующую на инструмент - индентор, величину перемещения инструмента-индентора относительно поверхности исследуемого образца, величину линейного износа по разности показаний датчика вертикальных перемещений инструмента-индентора; возвращают инструмент - индентор и каретку в исходное положение; сохраняют результат вычислений в памяти блока обработки информации. После выбора вида исследований - профилографирование - профилометрирование волнистости поверхности образца при выборе требуемого режима исследования задают длину трассы сканирования поверхности образца; устанавливают инструмент - алмазную иглу с углом при вершине 60° в державку; автоматически включают двигатель горизонтального перемещения столика вместе с образцом на величину длины трассы сканирования (без приложения нормальной нагрузки); одновременно с перемещением образца строят график на экране компьютера зависимости «вертикальное перемещение инструмента - горизонтальное перемещение исследуемого образца» в режиме реального времени; при задании нескольких чисел заданных измерений действие повторяют заданное число раз; выводят на экран среднюю линию профиля, линии впадин и выступов; рассчитывают параметры WZ - высоту волнистости SW - шаг волнистости; найденные значения критериев профиля волнистости исследуемой поверхности образца сохраняют в памяти блока обработки информации; возвращают каретку и инструмент - алмазную иглу в исходное положение; поворачивают ручку фиксации инструмента - алмазной иглы в положение «хранение», приподнимая при этом подвеску; сохраняют результаты вычислений в памяти блока обработки информации.
Устройство для определения прочностных характеристик материала, содержащее корпус коробчатой пустотелой формы с электродвигателем и редуктором внутри его; укрепленные на корпусе две параллельные колонны с установленной на них с возможностью перемещения по ним траверсой вместе с механизмами фиксации ее на колоннах и закрепленной на ней инструментом; инструментальной головкой, механизмом установки инструмента, механизмом подвода и отвода инструмента от поверхности образца, измерителем нормальных перемещений инструмента, датчиком нормальной силы, механизм и стол для установки и термостабилизации образца; механизм нормального нагружения инструмента; автоматизированную систему задания программы нагружения и разгружения, считывания, записи и обработки информации результатов испытаний совместно с персональным компьютером, при этом оно дополнительно снабжено механизмом тангенциального перемещения образца; механизмом поворота образца в вертикальной плоскости; механизмом тонкого перемещения образца в вертикальной плоскости; механизмом ускоренного перемещения и фиксации инструмента; датчиком измерения тангенциальной силы; механизмом вертикального перемещения траверсы; при этом механизм и стол для установки и термосабилизации образца выполнен в виде столика и плиты, установленной на корпусе устройства, соединенных между собой механизмом тангенциального перемещения образца, выполненного, в свою очередь, в виде нижнего корпуса, соединенного с плитой с возможностью перемещения по ее продольным направляющим посредством шагового электродвигателя, расположенного в нижнем корпусе, и реечной передачи, реечная шестерня которой закреплена на роторе шагового электродвигателя, а рейка - на плите, и механизмом поворота образца в вертикальной плоскости, скрепленного столиком, выполненным в виде верхнего клина и нижнего клина, установленного на верхнем корпусе с возможностью перемещения по его направляющим посредством вращения рукоятки ходового винта, закрепленного в подшипнике верхнего корпуса и связанного с резьбовым отверстием нижнего клина; причем верхний клин соединен посредством плоской и витой пружин с нижним корпусом с возможностью поворота относительно его посредством механизма поворота образца в вертикальной плоскости, состоящего из маховика-рукоятки винта, имеющего возможность вращения в гайке, закрепленной на нижнем корпусе и упираться сферическим концом в пяту, закрепленную в верхнем корпусе; а механизм вертикального перемещения траверсы выполнен в виде шагового электродвигателя, редуктора, включающего ременную передачу, промежуточный вал, двумя червяками на его концах и два червячных зубчатых колеса на двух ходовых винтах, пропущенных внутри соответствующих двух колонн и внутрь корпуса, двух ходовых гаек, закрепленных на двух жестко скрепленных с траверсой ползушках, установленных на соответствующих колоннах по подвижной посадке с возможностью фиксации на них посредством механизмов фиксации траверсы; механизм ускоренного перемещения и фиксации инструмента выполнен в виде диского кулачка и рукоятки его поворота; механизм нормального нагружения инструмента и механизм тангенциального перемещения инструмента выполнены в виде каретки, подвешенной на попарных плоско-параллельных пружинах с возможностью перемещения, в двух взаимно-перпендикулярных направлениях, посредством соответствующих двух перпендикулярно установленных линейных шаговых электродвигателей.
Отличительные признаки способа: отпадает необходимость иметь несколько разных устройств, исчезают операции по наладке и настройке каждого вида исследования из возможных шести, автоматически реализуемых на одном и том же устройстве: оценку микротвердости образца; профилографирование-профилометрирование шероховатости поверхности образца; оценку энергии активации пластической деформации; трибометрирование; прогнозирование остаточного ресурса; профилографирование-профилометрирование волнистости поверхности образца. Легко возможно перейти к любому из шести видов исследований за счет группирования одинаковых операций, общих для каждого вида исследований, чем автоматически командует командоаппарат согласно содержанию рабочей программы.
Отличительные признаки устройства: дополнительно введены механизм тангенциального перемещения образца; механизм поворота образца в вертикальной плоскости; механизм разгружающего отвода инструмента; механизм перемещения траверсы; по-иному выполнены механизм нормального нагружения инструмента и механизм тангенциального перемещения инструмента.
Сравнительный анализ способа и устройства с известными техническими решениями показывает, что в известных технических решениях отсутствуют отличительные признаки предлагаемых изобретений, позволяющих решить новую техническую задачу. Следовательно, эти признаки являются существенными.
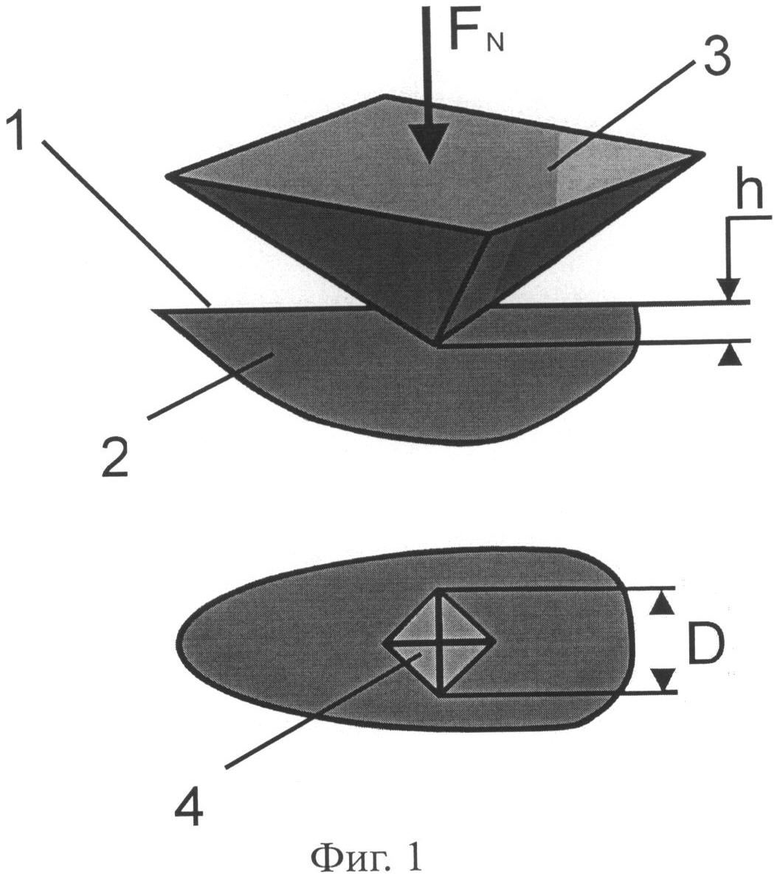
При определении твердости поверхности 1 образца 2 (Фиг.1) инструмент 3, в данном случае - индентор, под действием нормальной силы FN имеет возможность внедряться в образец 2 на величину h. Отпечаток 4 на поверхности 1 имеет прямоугольную форму с размером D диагонали. В этом случае есть возможность построить график зависимости глубины h отпечатка 4 от нормальной силы FN, передаваемой на инструмент-индентор, то есть

Индентор - четырехгранная пирамида с углом 136° (алмазный индентор Виккерса). Одновременно здесь существует возможность определить значение микротвердости Н для каждого значения h по известной формуле

где 
m=FN·10-3·g≈FN·10-2, [г] - эквивалентная масса навески для установки инструмента-индентора.
На основе (2) имеется возможность построить зависимость

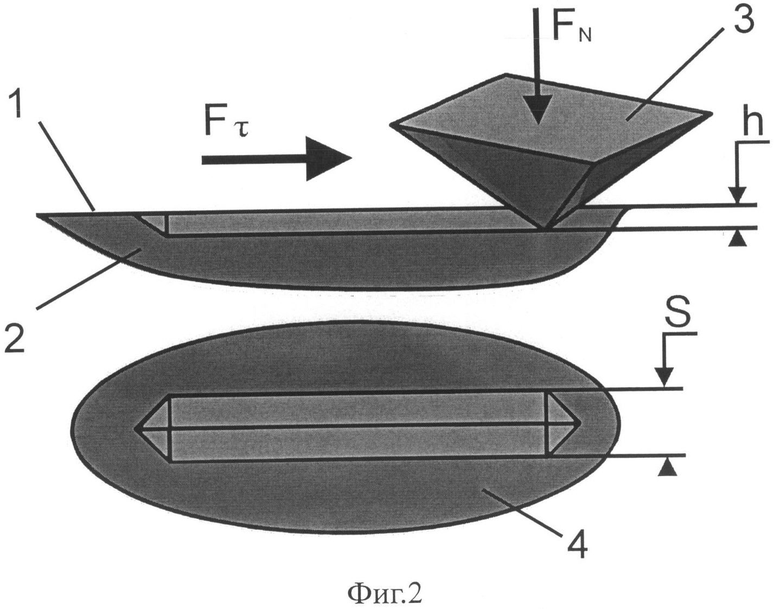
отображающей градиент механических свойств образца по глубине h отпечатка 4. При оценке энергии активации пластической деформации имеется возможность применить также стандартный алмазный индентор Виккерса 3 (Фиг.2) с углом при вершине 60° четырехгранной пирамиды. Инструменту-индентору сообщается нормальная сила FN до заданной величины. Образец 2 может перемещаться в продольном направлении. На образце 2 образуется царапина 4 заданной глубины h. Одновременно с царапанием имеется возможность измерить силу царапания F и рассчитать величину энергии активации пластической деформации.
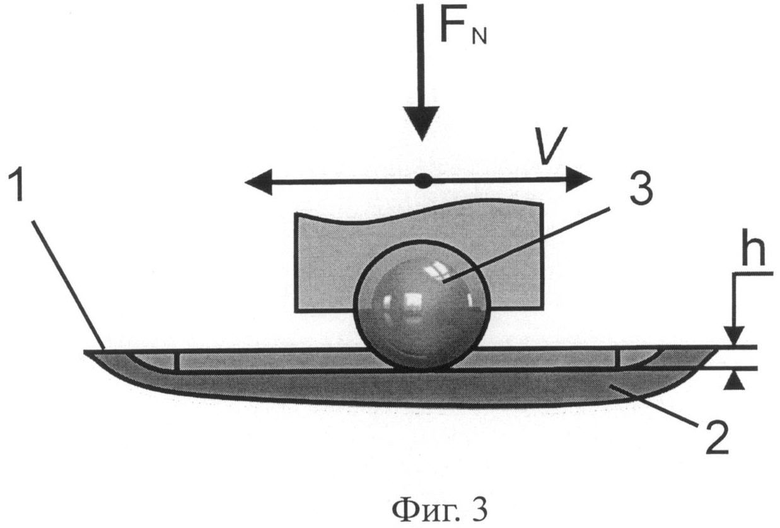
При оценке триботехнических свойств материала поверхностного слоя образца 2 инструменту 3 - сферическому индентору сообщают нормальную нагрузку FN до заданной величины. Образцу 2 (Фиг.3) сообщают заданную скорость V и амплитуду перемещения. При этом действует сила трения Fτ. На образце 2 возникает царапина глубиной h. Величину линейного износа определяют как разницу текущего и начального показаний датчика вертикальных перемещений инструмента-индентора 3.
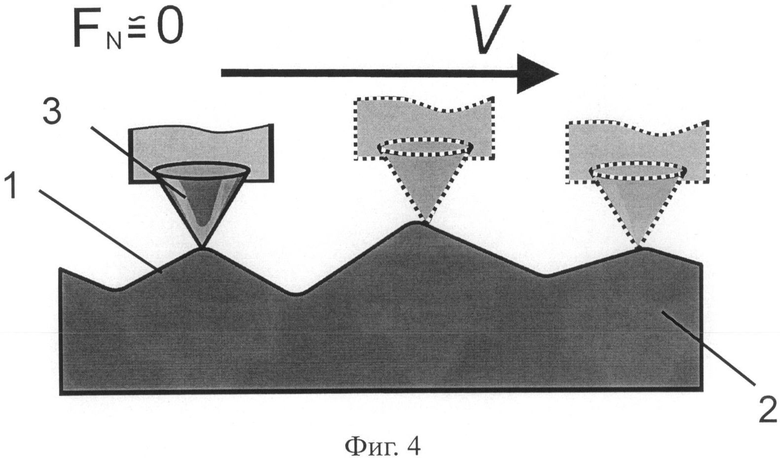
При оценке шероховатости профилограммы поверхности 1 (Фиг.4) имеется возможность использовать инструмент - алмазную иглу 3 с углом при вершине 60°. Ей могут сообщить продольное перемещение с заданной скоростью V на заданную длину, равную заданной базовой длине в интервале 0,25…8 мм. При этом нормальная сила равна нулю, то есть FN=0.
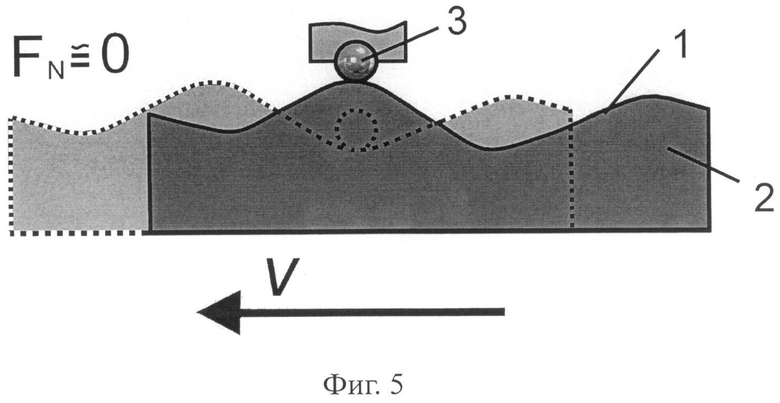
При оценке волнистости поверхности 1 образца 2 (Фиг.5) имеется возможность использовать инструмент - алмазную либо твердосплавную иглу 3 со сферическим концом. Ей могут сообщать только нормальное перемещение, а образцу 2 - продольное перемещение с заданной скоростью на всю заданную длину поверхности 1 образца 2.
При оценке прогнозирования остаточного ресурса материала поверхностного слоя образца есть возможность прогнозировать по текущему значению энергии активации пластической деформации, либо по кинематике изменения энергии активации пластической деформации.
При использовании первого варианта, то есть прогнозирования по текущему значению энергии активации пластической деформации, имеется возможность определять ожидаемое время наступления разрушения tрес и остаточный ресурс материала 5 в процентах от предшествующей наработки


где tэксп - длительность наработки материала в единицах времени; U0, 

В качестве текущего значения энергии активации пластической деформации принимается последнее измеренное значение энергии активации пластической деформации с помощью устройства.
Если прогнозировать по кинетике изменения энергии активации пластической деформации (при наличии данных о начальном участке кинетики накопления энергии активации пластической деформации испытываемого материала), то есть возможность построить таблицу исходных данных, в которую входят ранее определенные значения энергии активации пластической деформации, относящиеся к данному материалу и соответствующие им значения наработки. Имеется возможность выбора вида аппроксимации: линейный или нелинейный. Программа по экспериментальным данным таблицы имеет возможность автоматически строить на экране монитора компьютера зависимость в координатах «наработка - энергия активации пластической деформации», аппроксимированную с использованием метода наименьших квадратов. Также на экран могут выводиться горизонтальные прямые, соответствующие начальному и критическому уровням энергии активации пластической деформации материала. Точность вычисления длительности наработки - до 1 с., энергии активации - до 0,1 кДж/моль. Коэффициенты линейной аппроксимации вида Р1(x)=а0+а1·х есть возможность определить из системы уравнений:
Коэффициенты для нелинейной аппроксимации вида P2(x)=a0+a1·x+a2·x2 есть возможность найти из системы других уравнений:
где a0, a1, a2 - коэффициенты аппроксимации; n+1 - число экспериментальных точек в координатах «энергия активации пластической деформации - наработка»; x - наработка материала; у - экспериментальные значения энергии активации пластической деформации, полученные по аппроксимированным зависимостям первого и второго порядка, соответственно.
Есть возможность определить автоматически точку пересечения аппроксимированной зависимости с критическим значением энергии активации. Значение оси в точке пересечения указывает на прогнозируемое значение наработки материала, соответствующее моменту его разрушения.
Описание способа и устройства в статике.
Для реализации возможных шести операций служат измерительная и исполнительная системы устройства (Фиг.6). Измерительная система результатов воздействия на образец 1 инструмента 3 включает: датчик тангенциальной силы 5; датчик нормальной силы 6; датчик вертикальных (нормальных) перемещений 7; датчик горизонтальных (тангенциальных) перемещений 8; блок усилителей 9, на вход которого могут поступать сигналы с датчиков 5…8, аналогово-цифровой преобразователь 10, связанный на входе с выходом блока усилителей 9, а на выходе - с входом компьютера 11.
Исполнительная система содержит блок драйверов 12, имеющий возможность принимать на входе управляющие сигналы с компьютера 11, а на выходе связанный с исполнительными элементами. В качестве исполнительных элементов возможно использование шаговых двигателей, включая двигатель нормального нагружения 13, двигатель перемещения каретки 14, двигатель вертикальных перемещений траверсы 15, двигатель 16 перемещения столика 17 (двигатель 16 условно показан без редуктора).
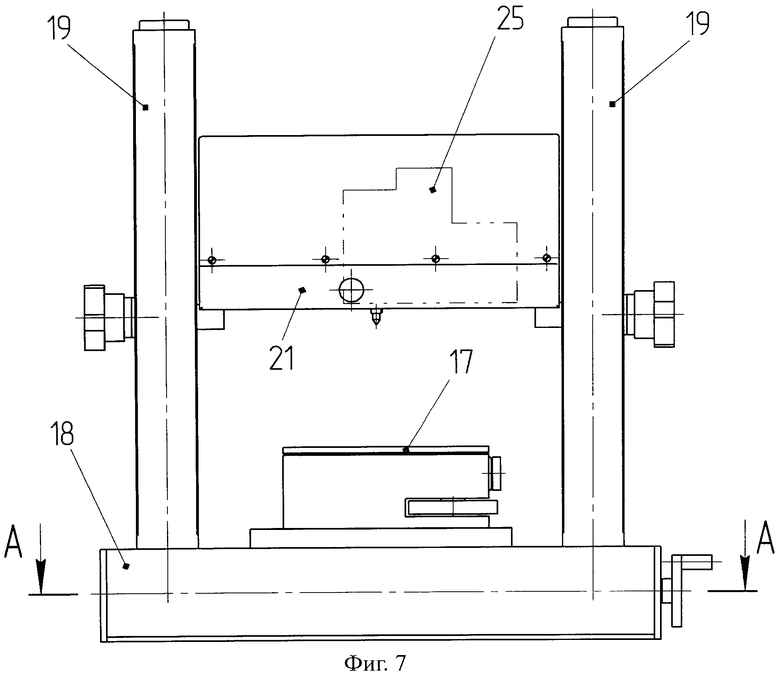
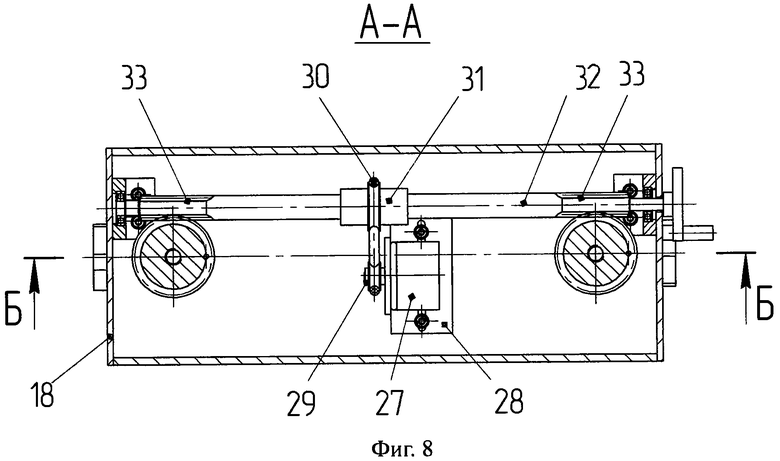
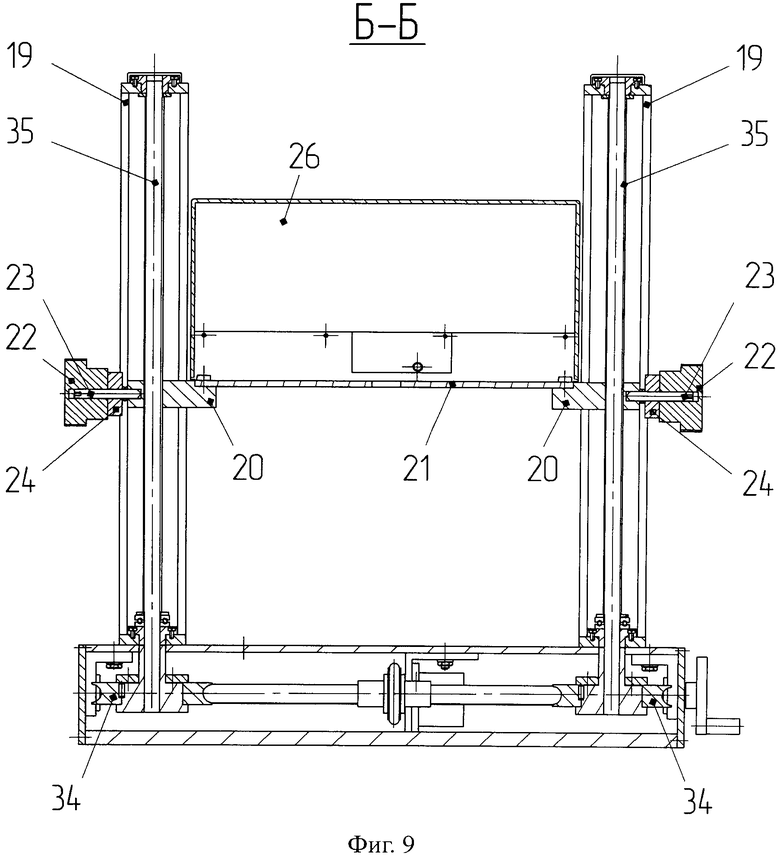
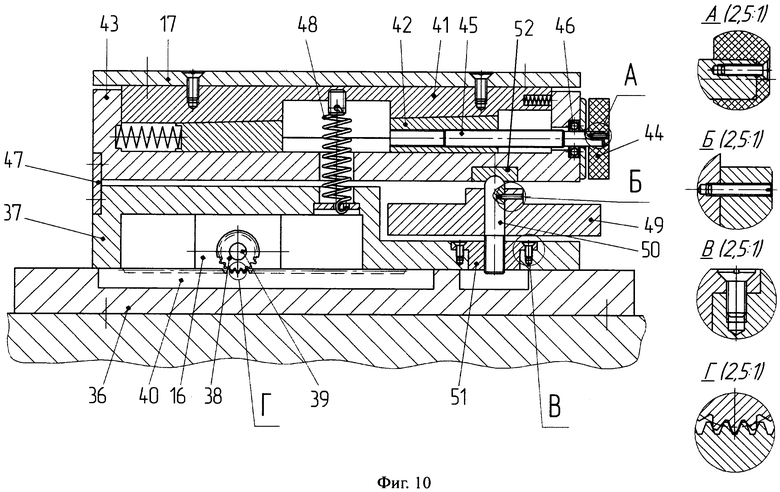
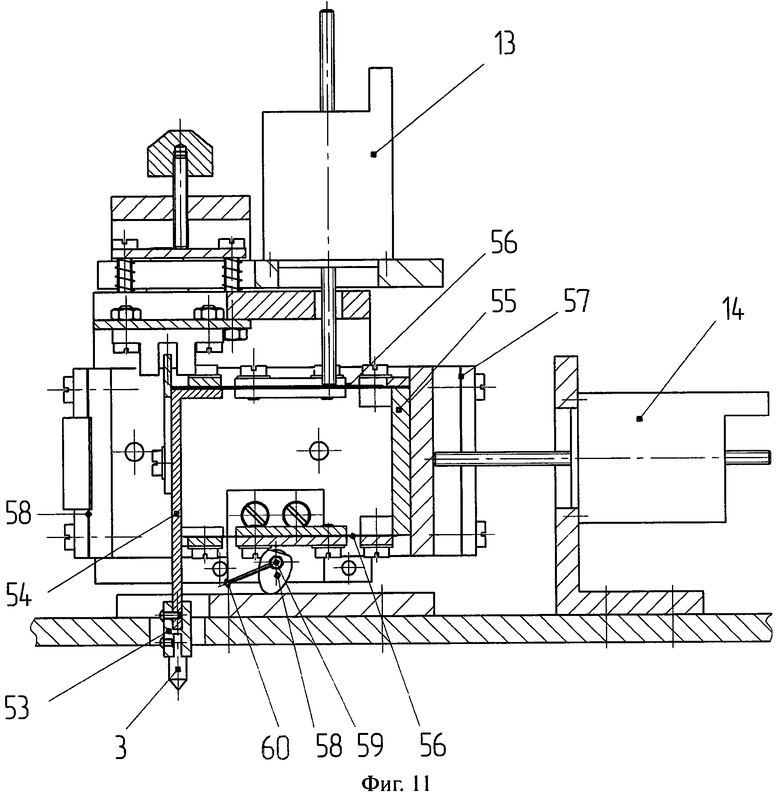
Конструктивная компоновка устройства показана на Фиг.7-11. Устройство состоит и корпуса 18 (фиг.7, 8, 9), коробчатой пустотелой формы, на которой установлены две параллельных колонны 19, пустотелые с вертикальными пазами. На колоннах 19 имеют возможность перемещаться ползушки 20 с закрепленной жестко на них траверсой 21 и механизмами фиксации траверсы 21 на колоннах 19. Механизмы фиксации траверсы 21 содержат рукоятки 22, винты 23 и обоймы 24. На траверсе 21 установлена инструментальная головка 25, закрытая кожухом 26. Корпус 18 внутри содержит привод перемещения траверсы 21 по колоннам 19, включающий шаговый электродвигатель 27, установленый на угольнике 28, ременную передачу 29, 30, 31 на вал 32 с червяками 33 на его концах, зацепляющимися с червячными зубчатыми колесами 34. Червячные зубчатые колеса 34 установлены на вертикальных винтах 35 ввинченных в резьбовые отверстия в ползушках 20. Вертикальные винты 35, установлены на подшипниках в колоннах 19 с возможностью вращения. На корпусе 18 установлена плита 36, несущая механизм и стол для установки и термо стабилизации образца (условно не показан), столик 17, механизм поворота образца в вертикальной плоскости, механизм тангенциального (продольного) перемещения образца. Механизм тангенциального перемещения образца выполнен в виде нижнего корпуса 37, соединенного с плитой 36 с возможностью перемещения по ее продольным направляющим (условно не показанным) посредством шагового электродвигателя 16, расположенного в нижнем корпусе 37, и реечной передачи, реечная шестерня 38 которой закреплена на роторе 39 шагового электродвигателя 16, а рейка 40 - на плите 36. Механизм нормального перемещения образца в вертикальной плоскости, скрепленный со столиком 17, выполнен в виде верхнего клина 41 и нижнего клина 42, установленного на верхнем корпусе 43 с возможностью перемещения по его направляющим (условно не показанным), посредством вращения рукоятки 44 ходового винта 45, закрепленного в подшипнике 46 верхнего корпуса 43 и связанного с резьбовым отверстием нижнего клина 42. В механизме поворота образца в вертикальной плоскости верхний корпус 43 соединен посредством плоской 47 и витой 48 пружин с нижним корпусом с возможностью поворота относительно его посредством механизма поворота образца в вертикальной плоскости, состоящего из маховика-рукоятки 49 винта 50, имеющего возможность вращения в гайке 51, закрепленный на нижнем корпусе 37 и упираться сферическим концом в пяту 52, закрепленную в верхнем корпусе 43. Инструментальная головка 25 предназначена для установки инструмента 3 (Фиг.11) на державке 53 посредством винтов. Державка 53 соединена с подвеской 54. Подвеска 54 упруго подвешена на каретке 55 посредством двух пар плоских пружин 56 и 57. Пружины 56 обеспечивают возможность плоско - параллельного перемещения подвески 54 в вертикальном (нормальном) направлении, а пружины 57 - в горизонтальном (тангенциальном) соответственно.
Инструмент 3 имеет возможность осуществить названные перемещения посредством двух линейных шаговый электродвигателей 13 и 14 имеющих возможность перемещать каретку 55 в двух взаимно перпендикулярных направлениях: по вертикали и по горизонтали, соответственно.
Инструментальная головка 25 снабжена механизмом нормального перемещения инструмента 3, состоящего из дискового кулачка 58, имеющего возможность поворачиваться на собственной оси 59 под действием рукоятки 60.
Описание способа и устройства в динамике.
Включают электропитание устройства от однофазной сети переменного тока промышленной частоты. Включают блок обработки информации, реализованный на базе персонального компьютера 11. Загружают рабочую программу. Поворачивают ручку 60 фиксации инструмента 3 в положение «измерение». При этом кулачок 58 отводят от подвески 54, освобождая ее. Подвеска 54 при этом подвешивается на системе из четырех плоскопараллельных пружин 56, 57.
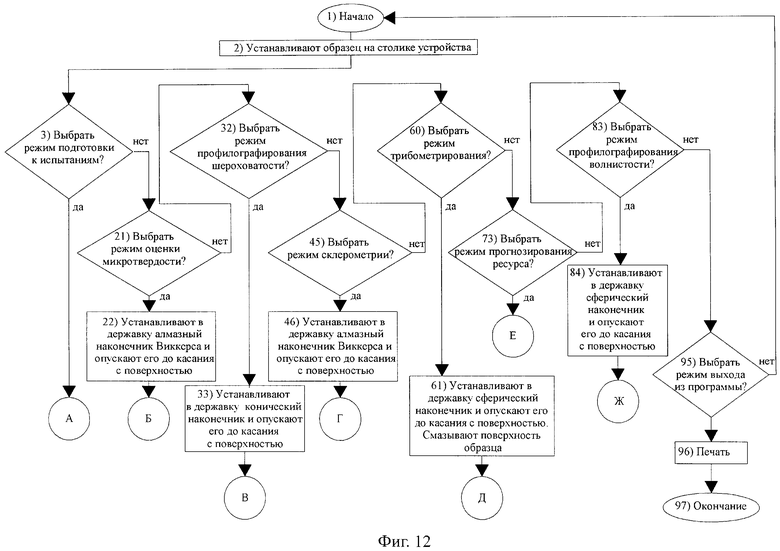
Образец 2, подлежащий испытанию, после обезжиривания и сушки устанавливают на столике 17 таким образом, чтобы исследуемая поверхность 1 с помощью механизма поворота образца в вертикальной плоскости (рукояткой 49) заняла горизонтальное положение под инструментом. С помощью рабочей программы выбирают вид испытаний из числа реализуемых устройством способов:
- подготовка к испытаниям (алгоритм частный А);
- оценка микротвердости (алгоритм частный Б);
- оценка шероховатости при профилографировании-профилометрировании (алгоритм частный В);
- оценка энергии активации пластической деформации (алгоритм частный Г);
- оценка триботехнических свойств материала (алгоритм частный Д);
- прогнозирование остаточного ресурса (алгоритм частный Е);
- оценка волнистости при профилографировании-профилометрировании (алгоритм частный Ж).
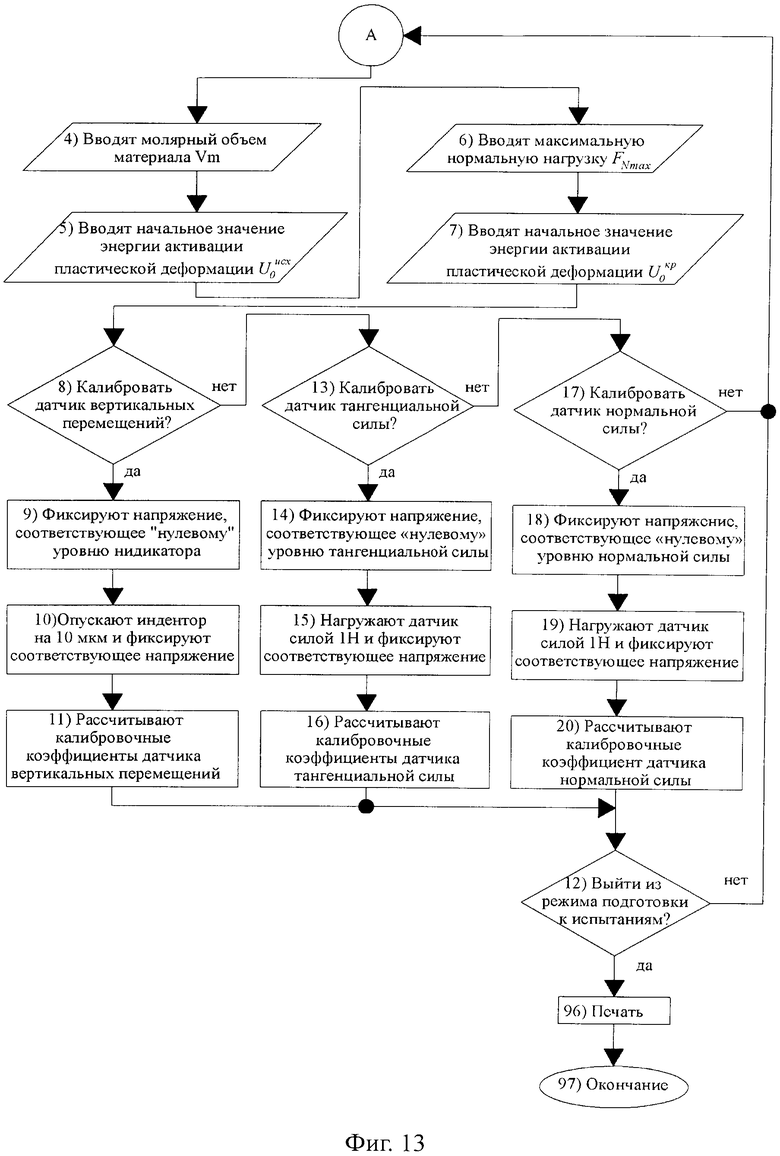
При реализации частного алгоритма А: вводят молярный объем материала Vm (блок 4); начальное значение энергии активации пластической деформации
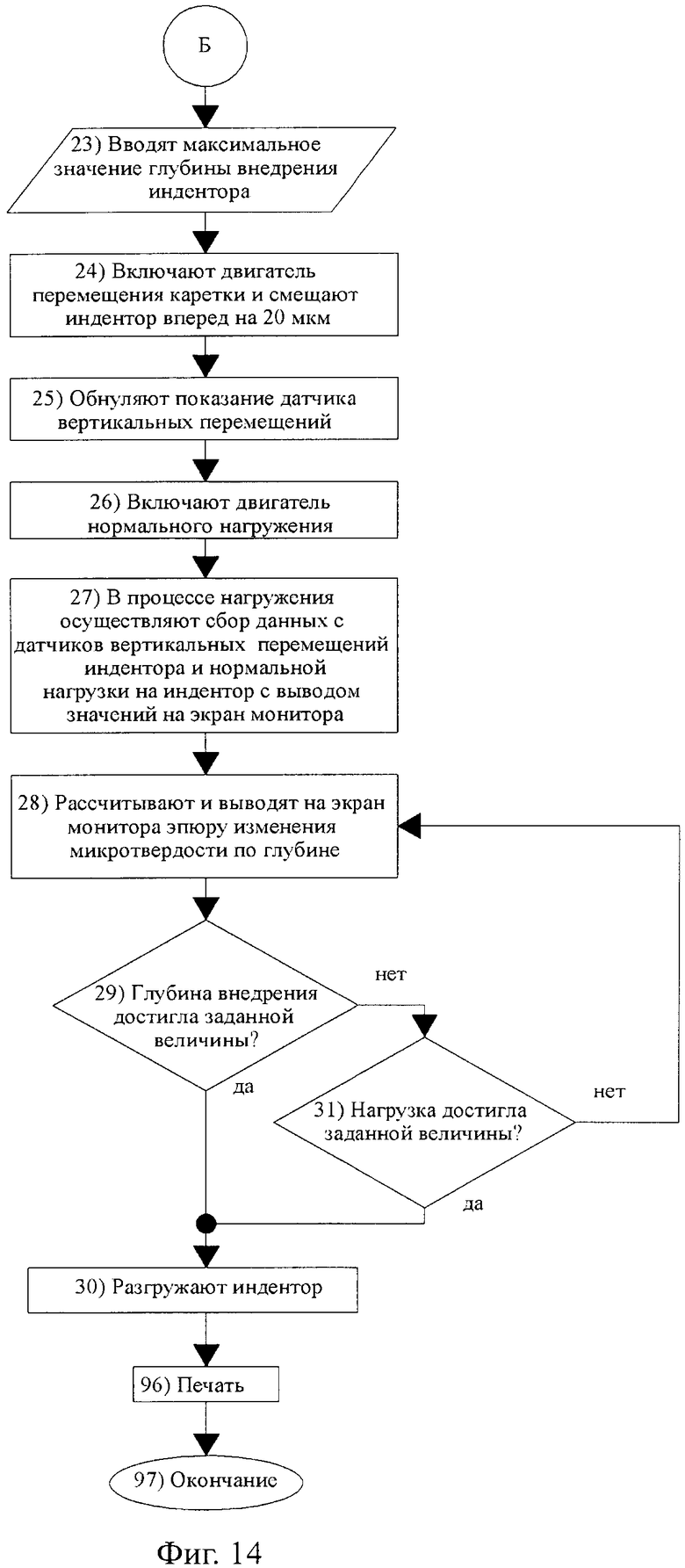
При реализации частного алгоритма Б вводят максимальное значение глубины внедрения инструмента-индентора (блок 23); включают двигатель перемещения каретки и смещают инструмент-индентор вперед на 20 мкм (блок 24); обнуляют показания датчика вертикальных перемещений (блок 25); включают двигатель нормального нагружения (блок 26); осуществляют сбор данных (в процессе нагружения) с датчиков вертикальных перемещений инструмента-индентора и нормальной нагрузки на инструмент-индентор с выводом значений на монитор (блок 27); рассчитывают и выводят на экран монитора эпюру изменения микротвердости по глубине (блок 28). Если глубина внедрения достигла заданной величины (блок 29), то разгружают инструмент-индентор (блок 30) и вывод на печать (блок 96). Если нет, то выясняют: нагрузка достигла максимальной величины? (блок 31). Если да, то разгружают инструмент-индентор (блок 30) и выводят на печать (блок 96).
Если нет, то возвращаются к расчету эпюры изменения микротвердости по глубине (блок 28).
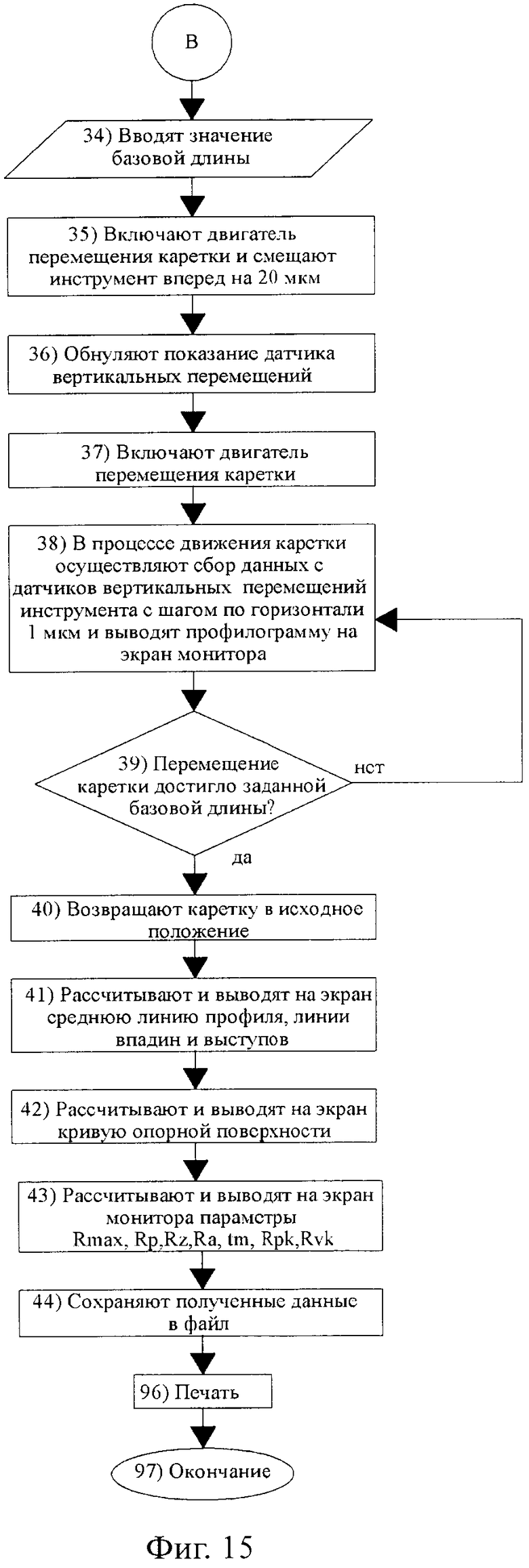
При реализации частного алгоритма В: вводят значение базовой длины (блок 34); включают двигатель перемещения каретки и смещают инструмент - алмазную иглу вперед на 20 мкм (блок 35); обнуляют показания датчика вертикальных перемещений (блок 36); включают двигатель перемещения каретки (блок 37); выполняют сбор данных с датчика вертикальных перемещений инструмента - алмазной иглы (в процессе движения каретки) с шагом по горизонтали 1 мкм и выводят профилограмму на экран монитора (блок 38). Выясняют: перемещение каретки достигло заданной базовой длины? (блок 39). Если да, то возвращают каретку в исходное положение (блок 40); рассчитывают и выводят на экран среднюю линию профиля, линии впадин и выступов (блок 41); рассчитывают и выводят на экран кривую опорной поверхности (блок 42); рассчитывают и выводят на экран монитора параметры Rmax, Rp, Rz, Ra, tm, Rpk, RVk (блок 43); сохраняют полученные данные в файле (блок 44); вывод на печать (блок 96). Если нет (блок 39), то возвращаются в блок 38.
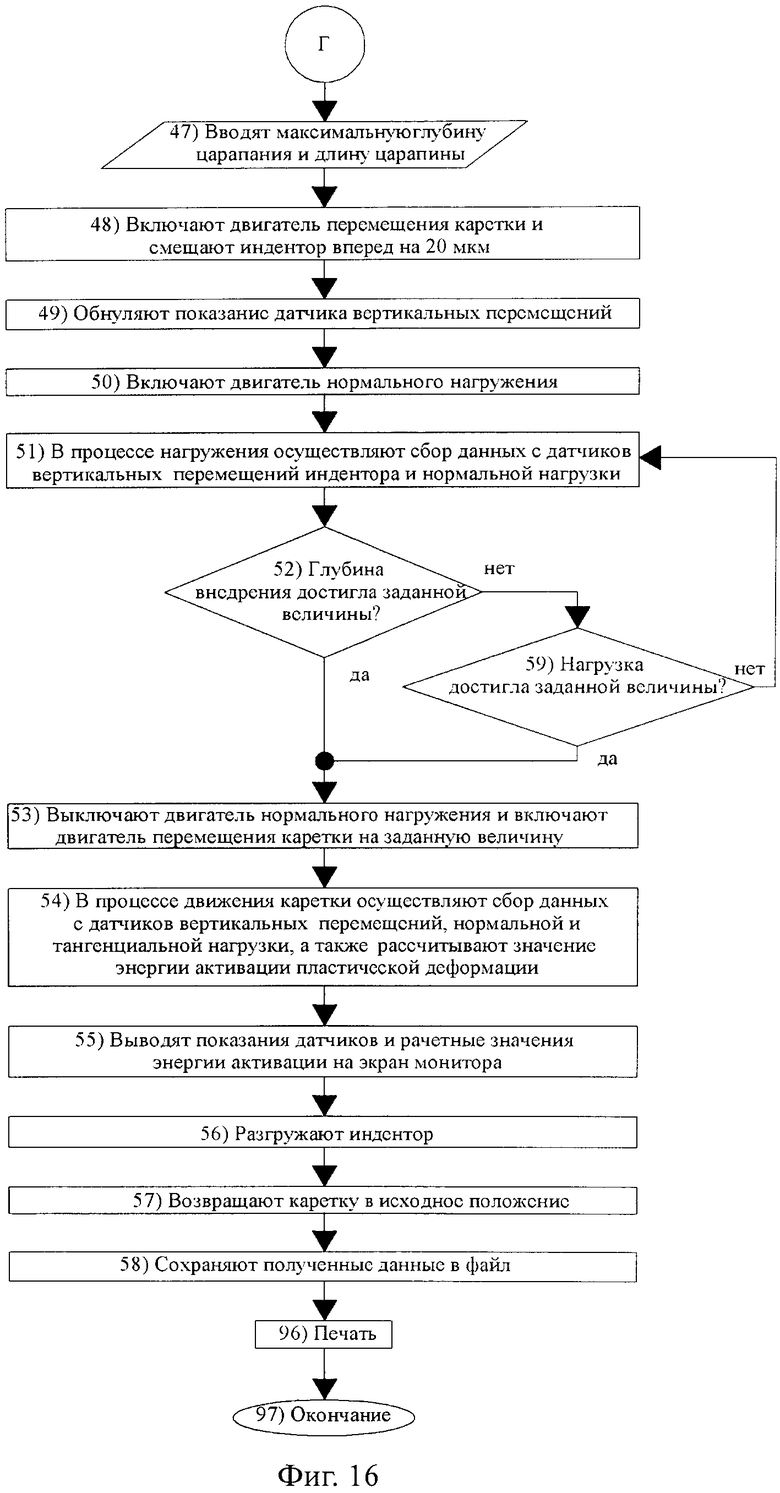
При реализации частного алгоритма Г: вводят максимальную глубину царапания и длину царапины (блок 47; включают двигатель перемещения каретки и смещают инструмент-индентор вперед на 20 мкм (блок 48; обнуляют показания датчика вертикальных перемещений инструмента-индентора (блок 49; включают двигатель нормального нагружения инструмента-индентора (блок 50); собирают данные с датчика вертикальных перемещения (в процессе нагружения) и нормальной нагрузки (блок 51); если глубина внедрения достигла заданной величины (блок 52), то выключают двигатель нормального нагружения индентора и включают двигатель перемещения каретки (блок 53); собирают данные с датчиков вертикальных перемещений, нормальной и тангенциальной нагрузки, рассчитывают значение энергии активации пластической деформации (блок 54); выводят показания датчиков и расчетные значения энергии активации на экран монитора (блок 55); разгружают инструмент-индентор (блок 56); возвращают каретку в исходное положение (блок 57); сохраняют полученные данные (блок 58); выводят на печать (блок 96). Если в блоке 52 отрицательный ответ, то при достижении нагрузки максимальной величины (блок 59) переходят в блок 53. Если в блоке 59 получают отрицательный ответ, то возвращаются в блок 51 - продолжают сбор данных.
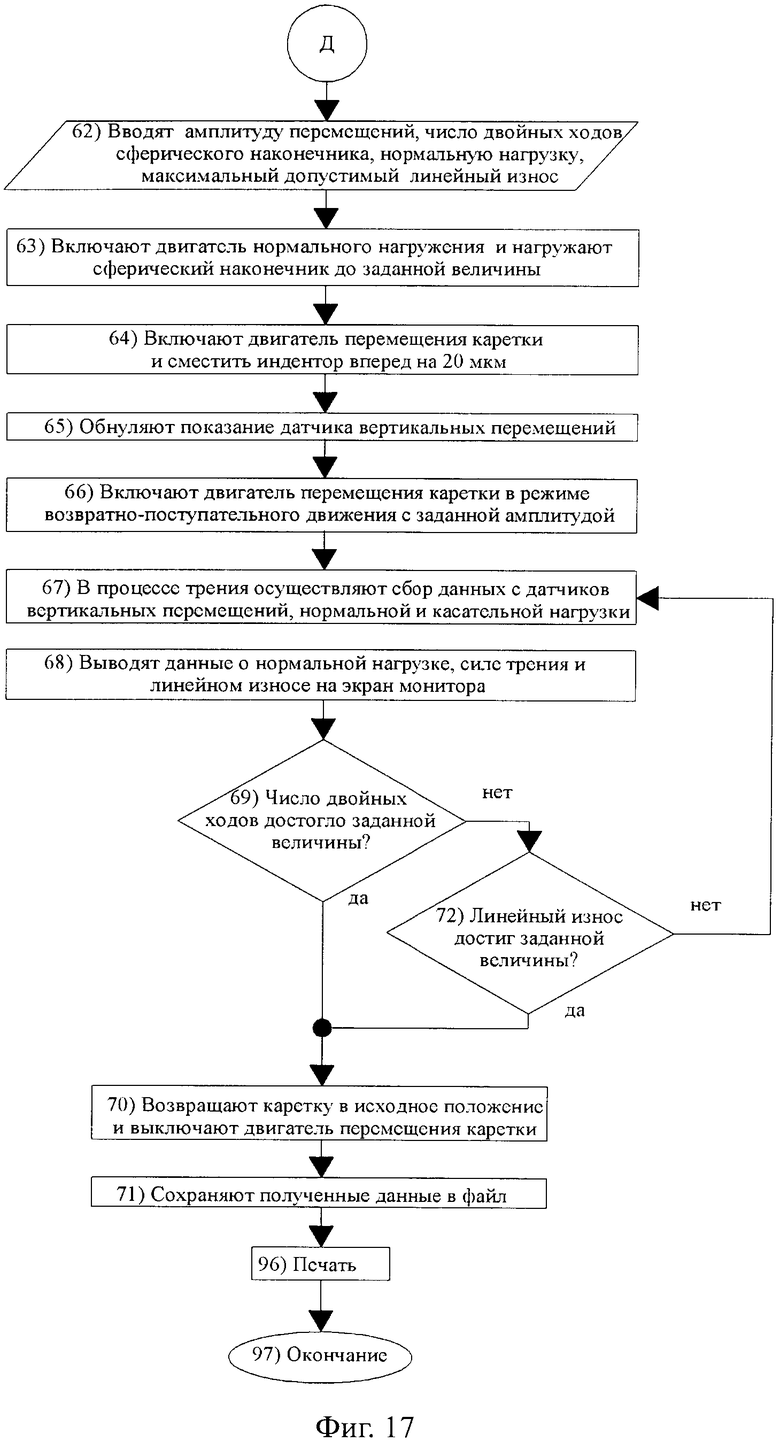
При реализации частного алгоритма Д: вводят амплитуду перемещений, число двойных ходов инструмента - сферического наконечника, нормальную нагрузку, максимальный допустимый линейный износ (блок 62); включают двигатель нормального нагружения, нагружают инструмент - сферический наконечник до заданной величины (блок 63);
включают двигатель перемещения каретки, смещают инструмент - сферический наконечник вперед на 20 мкм (блок 64); обнуляют показания датчика вертикальных перемещений (блок 65); включают двигатель перемещения каретки в режиме возвратно-поступательного движения с заданной амплитудой (блок 66); собирают данные с датчиков вертикальных перемещений, нормальной и тангенциальной нагрузки (блок 67); выводят данные о нормальной нагрузке, силе трения и линейном износе на экран монитора (блок 68); если число двойных ходов достигло заданной величины (блок 69), то возвращают каретку в исходное положение и выключают двигатель перемещения каретки (блок 70); сохраняют полученные данные в файле (блок 71); выводят на печать (блок 96); если в блоке 69 получают отрицательный ответ, то ставят второй вопрос (блок 72): линейный износ достиг заданной величины? Если да, то продолжают - возвращая каретку в исходное положение и т.д. (блок 70). Если нет, то возвращаются в блок 67.
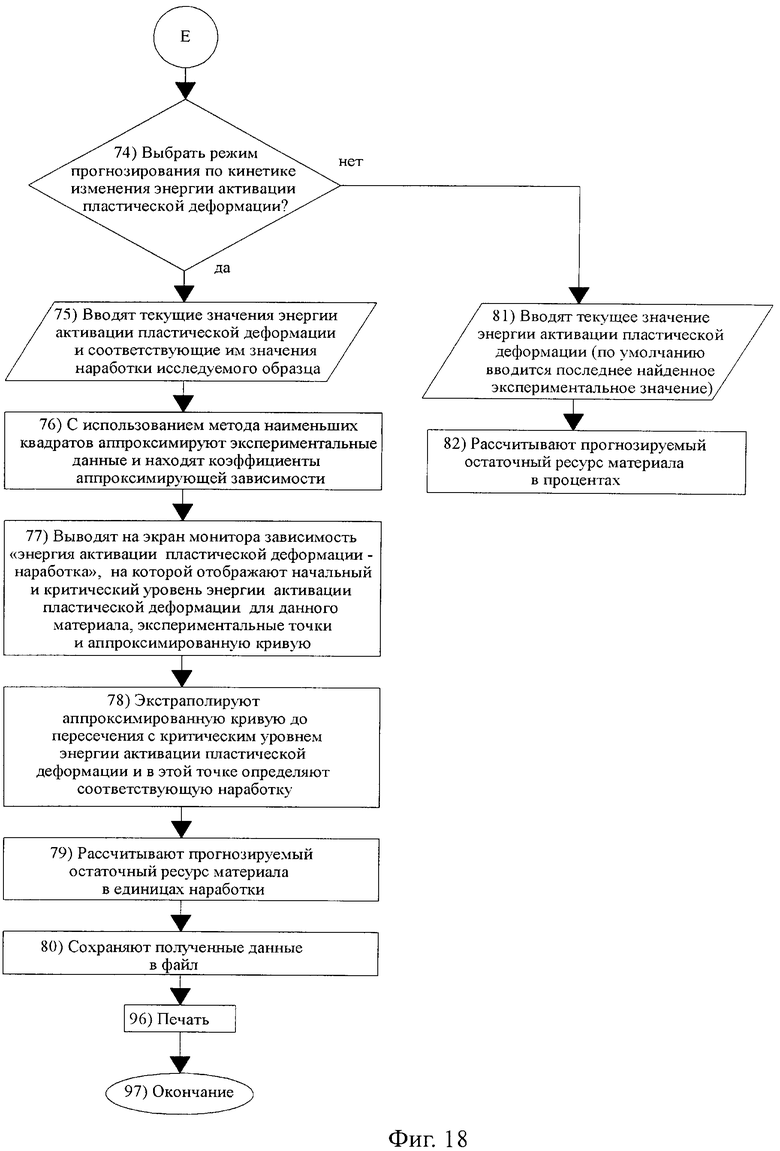
При реализации частного алгоритма Е: ставят вопрос о выборе режима прогнозирования - по кинетике изменения энергии активации пластической деформации? (блок 74). При положительном ответе вводят текущие значения энергии активации пластической деформации и соответствующие им значения наработки исследуемого образца (блок 75); аппроксимируют экспериментальные данные методом наименьших квадратов, находят коэффициенты аппроксимированной зависимости (блок 76); выводят на экран монитора зависимость «энергия активации пластической деформации - наработка», на ней отображают начальный и критический уровень энергии активации пластической деформации для данного материала, экспериментальные точки, аппроксимированную кривую (блок 77); экстраполируют аппроксимированную кривую до пересечения с критическим уровнем энергии активации пластической деформации, в этой точке находят соответствующую наработку (блок 78); рассчитывают прогнозируемый остаточный ресурс материала в единицах наработки (блок 79); сохраняют полученные данные в файле (блок 80); выводят на печать (блок 96). При отрицательном ответе в блоке 74 выводят текущее значение энергии активации пластической деформации (вводят последнее найденное экспериментальное значение - по умолчанию) (блок 81); рассчитывают прогнозируемый остаточный ресурс материала - в процентах (блок 82); переходят в блок 80 - сохранение данных в файле и печать (блок 96).
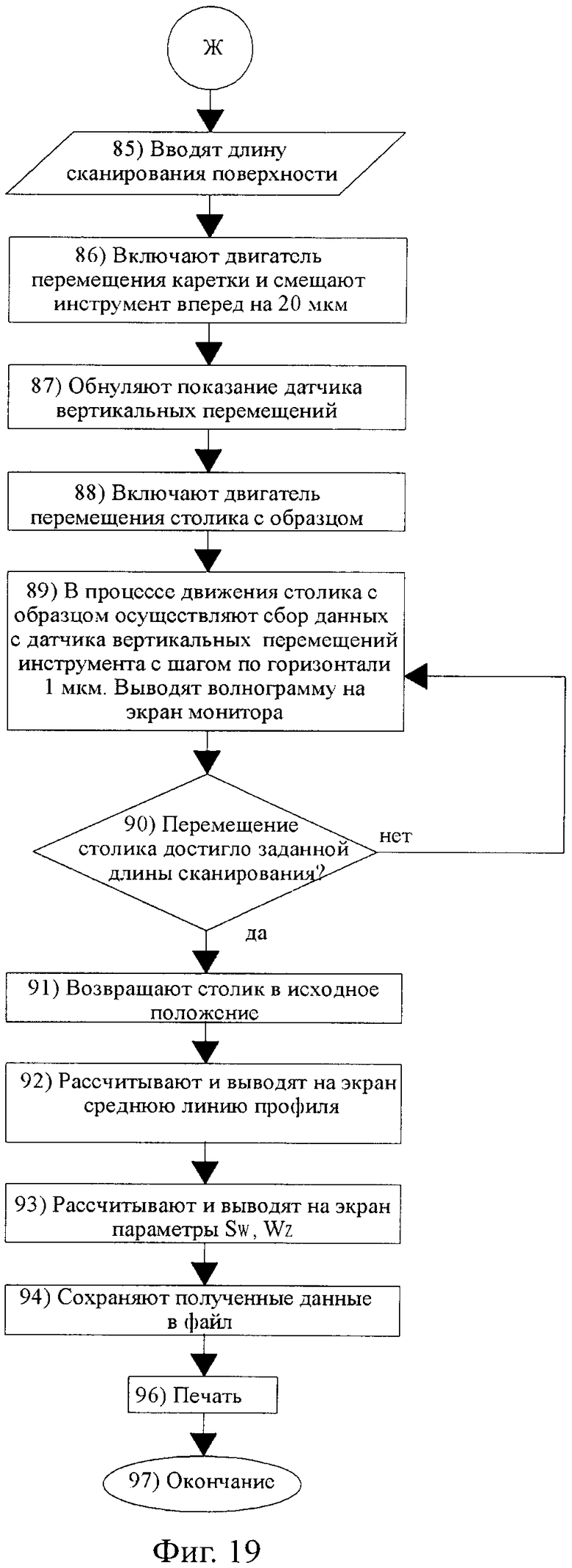
При реализации частного алгоритма Ж вводят длину сканирования поверхности (блок 85); включают двигатель перемещения каретки, смещают инструмент - алмазную иглу вперед на 20 мкм (блок 86); обнуляют показания датчика вертикальных перемещений (блок 87); включают двигатель перемещения столика с образцом (блок 88); собирают данные с датчика вертикальных перемещений инструмента - алмазной иглы с шагом по горизонтали 10 мкм, выводят волнограмму на экран монитора (блок 89); если перемещение столика с образцом достигло заданной величины? (блок 90), то возвращают стол с образцом в исходное положение (блок 91); рассчитывают и выводят на экран монитора линии вершин, среднего профиля, линию впадин (блок 92); рассчитывают и выводят на экран монитора параметры W2, SB (блок 93); сохраняют полученные данные в файле (блок 94), выводят на печать (блок 96). Если в блоке 90 получают отрицательный ответ, то возвращаются в блок 89.
Примеры реализации заявляемых способа и устройства.
Исследовали качество поверхности посеребренной бронзовой шайбы герметизированной опоры бурового долота. Покрытие - наноструктурированное серебряно-алмазное (толщина 20 мкм), основа - бериллиевая бронза БрБ2 ГОСТ 18175-78 (твердость после старения НВ 350), подслой - медь (толщина 1 мкм). Размеры шайбы: наружный диаметр - 50 мм, диаметр отверстия - 20 мм, толщина - 2,5 мм.
Установили шайбу на столике устройства, прихватив шайбу с двух противоположных сторон пластилином для исключения тангенциальных перемещений шайбы по столу при испытаниях. Включили устройство, запустили компьютер и прогрели в течение 15 минут. Запустили на компьютере рабочую программу, при этом открылось главное окно рабочей программы, на котором приведено главное меню с опциями выбора вариантов функционирования устройства: «Подготовка к испытаниям»; «Оценка микротвердости»; «Профилографирование - шероховатость»; «Склерометрирование»; «Трибометрирование»; «Прогнозирование ресурса»; «Профилографирование - волнистость»; «Закрыть программу». Опустили перекладину портала до соприкосновения индентора с поверхностью шайбы. Обнулили показание датчика вертикальных перемещений.
Пример №1 реализации частного алгоритма «А».
Включили режим подготовки к испытаниям. Ввели в соответствующие окна рабочей программы: молярный объем серебра Vm=10300 кДж/моль; начальное значение энергии активации пластической деформации uн=64 кДж/моль; максимальную нормальную нагрузку на инструмент-индентор FNmax=3 Н; критическое значение энергии активации пластической деформации u*=110 кД/моль. Сохранили введенные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №2 реализации частного алгоритма «Б».
Включили режим оценки микротвердости. Установили в державку инструмент - стандартный алмазный наконечник Виккерса с квадратным основанием и межгранным углом при вершине 136°. Ввели значение глубины внедрения инструмента - индентора h=3 мкм. Нажали на кнопку «Старт». Устройство автоматически переместило индентор на 20 мкм влево и обнулило показания датчика вертикальных перемещений. Далее автоматически включился двигатель нормального нагружения. При этом на экране компьютера начала строиться зависимость микротвердости Нµ от глубины внедрения инструмента-индентора h. После достижения заданной величины h=3 мкм двигатель нормального нагружения остановился и начал возвращаться в исходное состояние до полной разгрузки инструмента - индентора. Микротвердость на глубине 1 мкм составила 102 кгс/мм2, на глубине 2 мкм - 87 кгс/мм2, на глубине 3 мкм - 85 кгс/мм2. Сохранили полученные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №3 реализации частного алгоритма «Ж».
Включили режим профилографирования волнистости. Установили в державку инструмент - сферический стальной индентор (⌀ 3 мм). Переместили столик с образцом на 1 мм вправо относительно индентора. Выбрали в диалоговом окне режим построения волнограммы. Ввели длину сканирования поверхности L=20 мм и нажали на кнопку «Старт». Устройство автоматически переместило инструмент на 20 мкм влево и обнулило показания датчика вертикальных перемещений. Далее устройство автоматически провело сканирование профиля поверхности шайбы в течение 37 секунд (по хорде). В процессе сканирования на экране компьютера строилась волнограмма поверхности. После завершения сканирования инструмент вернулся в исходное состояние. На экране монитора автоматически построились средняя линия профиля, линии вершин и впадин и параметры волнистости поверхности шайбы: высоту волнистости WZ=4,2 мкм; шаг волнистости SW=5431 мкм. Сохранили полученные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №4 реализации частного алгоритма «В».
Включили режим профилографирования - шероховатости. Установили в державку инструмент - конический индентор с углом при вершине 60°. Переместили столик с образцом на 1 мм вправо относительно инструмента-индентора. В диалоговом окне отказались от режима построения волнограммы. Ввели базовую длину lб=1,6 мм и нажали на кнопку «Старт». Устройство автоматически провело сканирование профиля поверхности в течение 3 секунд. В процессе сканирования на экране компьютера строилась профилограмма поверхности. После завершения сканирования инструмент вернулся в исходное состояние. На экране монитора высветилась кривая опорной поверхности и параметры шероховатости поверхности шайбы: Rmax=24 мкм; Rp=1,3 мкм; RZ=1,1 мкм; Ra=0,3 мкм. Сохранили полученные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №5 реализации частного алгоритма «Г».
Включили режим склерометрирования. Установили в державку инструмент - стандартный алмазный наконечник Виккерса с квадратным основанием и межгранным углом при вершине 136°. Переместили столик с образцом на 1 мм вправо относительно инструмента - индентора. Ввели значения глубины царапания h=3 мкм, длины царапины Lц=400 мкм и нажали на кнопку «Старт». Устройство автоматически переместило инструмент-индентор на 20 мкм влево и обнулило показания датчика вертикальных перемещений. Далее автоматически включился двигатель нормального нагружения при этом на экране компьютера началось отображение показаний датчика нормальной силы. После достижения заданной величины глубины внедрения инструмента-индентора h=3 мкм двигатель нормального нагружения остановился. Далее автоматически включился двигатель перемещения каретки и начал перемещать инструмент-индентор влево на заданную величину длины царапины. При этом на экране монитора отображались графики зависимостей глубины внедрения инструмента-индентора, нормальной и тангенциальной сил от величины тангенциального перемещения инструмента-индентора, а также отображалась расчетная зависимость энергии активации пластической деформации от величины тангенциального перемещения инструмента-индентора. После достижения длины царапины заданной величины двигатель нормального нагружения инструмента-индентора возвращается в исходное состояние, разгружая инструмент-индентор, а двигатель перемещения каретки возвращает каретку в исходное состояние. В соответствующем окне высветилось усредненное значение энергии активации пластической деформации. Полученное значение энергии активации пластической деформации (um=70 кДж/моль) сохранили в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №6 реализации частного алгоритма «Д».
Включили режим трибометрирования. Установили в державку инструмент - сферический стальной наконечник (⌀ 3 мм). Смазали поверхность шайбы смазкой «Циатим-201». Ввели значение амплитуды перемещения наконечника А=1,5 мм, число двойных ходов N=1000, нормальную нагрузку FN=0,5 H, максимальный линейный износ Wh=10 мкм. Переместили столик с образцом на 1 мм вправо относительно индентора. Нажали на кнопку «Старт». Далее автоматически включился двигатель нормального нагружения до появления заданной величины нормальной нагрузки, действующей через наконечник на исследуемую поверхность.
Устройство автоматически переместило сферический наконечник на 20 мкм влево и обнулило показания датчика вертикальных перемещений. Далее автоматически включился двигатель перемещения каретки в режиме возвратно-поступательного движения с заданной амплитудой. При этом на экране компьютера начались строиться эпюры показаний датчиков нормальной и тангенциальной сил, а также вертикальных перемещений (линейного износа). После достижения заданного значения числа двойных ходов двигатель нормального нагружения разгрузил индентор. Достигнутая величина линейного износа составила Wh=6,5 мкм, амплитуда силы трения составила 0,11Н. Сохранили полученные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Пример №7 реализации частного алгоритма «Е».
Включили режим прогнозирования ресурса. Отказались от режима прогнозирования ресурса по кинетике изменения энергии активации пластической деформации. В окне ввода текущего значения энергии активации пластической деформации оставили без изменения введенное туда по умолчанию последнее измеренное значение энергии активации пластической деформации um=70 кДж/моль. Нажали на кнопку «Старт». Программа автоматически рассчитала прогнозируемый остаточный ресурс материала поверхностного слоя исследованной шайбы, который составил δ=87%. Сохранили полученные данные в памяти компьютера. Нажали на кнопку «Главное меню» и вышли в главное окно рабочей программы.
Проведенные испытания подтвердили достижение поставленных технических задач в заявленных способе и устройстве.
Экономическая эффективность заявляемого способа и устройства проявляется в двух направлениях: резкое снижение материальных затрат в связи с исключением необходимости применения нескольких разных устройств и приборов; возможность получения качественно новых результатов с затратой времени, в несколько раз меньшего по сравнению с применением известных способов, то есть при резком повышении производительности процесса испытания образцов. Графические материалы заявки содержат:
Фиг.1 - схема контактирования инструмента-индентора с поверхностью образца для оценки микротвердости;
Фиг.2 - схема контактирования инструмента-индентора с поверхностью образца для оценки энергии активации пластической деформации;
Фиг.3 - схема контактирования инструмента-индентора с поверхностью образца для оценки триботехнических свойств материала поверхностного слоя образца;
Фиг.4 - схема контактирования инструмента с поверхностью образца для оценки шероховатости;
Фиг.5 - схема контактирования инструмента с поверхностью образца для оценки волнистости;
Фиг.6 - функциональная схема измерительной и исполнительной систем устройства;
Фиг.7 - вид спереди устройства;
Фиг.8 - разрез А-А устройства;
Фиг.9 - разрез Б-Б устройства;
Фиг.10 - продольный вертикальный разрез механизмов поворота образца в вертикальной плоскости, механизма тангенциального перемещения образца;
Фиг.11 - механизмы установки и перемещения инструмента;
Фиг.12 - блок-схема алгоритма реализации операций способа определения прочностных характеристик материала (общий алгоритм);
Фиг.13 - то же, частный алгоритм «А»;
Фиг.14 - то же, частный алгоритм «Б»;
Фиг.15 - то же, частный алгоритм «В»;
Фиг.16 - то же, частный алгоритм «Г»;
Фиг.17 - то же, частный алгоритм «Д»;
Фиг.18 - то же, частный алгоритм «Е»;
Фиг.19 - то же, частный алгоритм «Ж».
Используемая литература
1. Патент РФ №2166745. Способ оценки энергии активации разрушения материала поверхностного слоя, деформированного трением / Д.Г. Громаковский, Е.В. Беленьких, И.Д. Ибатуллин и др. Опубл. 10.05.2001.
2. Патент РФ №2080581. Способ определения прочностных характеристик металлов и их сплавов / А.Е. Кубарев, Л.Х. Аннабердиев. Опубл. 27.05.1997, бюл. №15.
3. Патент РФ №2277232. Способ определения прочностных характеристик материала и устройство для его осуществления / М.Б. Бакиров, С.Ю. Ганигин, Д.Г. Громаковский, В.В. Дикоп, А.В. Дынников, И.Д. Ибатуллин и др. Опубл. 27.05.2006, бюл №15.
4. Патент РФ №2093814. Устройство для контроля технического состояния обода железнодорожного колеса / Бернар Като, Валерио Дель Фабро, Ги Стевено, Опубл. 20.10.1997, бюл. №29.
5. Патент РФ №2067753. Устройство для определения твердости шпилек паровых турбин / И.А. Пермитин, Г.А. Бологов, А.А. Азнабаев, В.А.Агафонов. Опубл. 10.10.1996, бюл. №28.
6. Матюнин В.М. Методы и средства безобразцовой экспресс-оценки механических свойств конструкционных материалов. Учебное пособие по курсу «Диагностика структурно-механического состояния металла»/ Под ред. В.Г.Борисова. - М.: Изд-во МЭИ. 2001. - 94 с. С.77-78, рис.7.12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ЭНЕРГИИ АКТИВАЦИИ ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИИ ПОВЕРХНОСТНОГО СЛОЯ И ПЕРЕНОСНОЙ СКЛЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2475720C2 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ПОВЕРХНОСТИ ОБРАЗЦА | 2012 |
|
RU2516022C2 |
| УСТРОЙСТВО ДЛЯ ТРИБОТЕХНИЧЕСКИХ ИСПЫТАНИЙ МАТЕРИАЛОВ | 2011 |
|
RU2482464C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2277232C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ ГОРНЫХ ПОРОД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2204121C2 |
| СПОСОБ ОЦЕНКИ ЭНЕРГИИ АКТИВАЦИИ РАЗРУШЕНИЯ МАТЕРИАЛА ПОВЕРХНОСТНОГО СЛОЯ | 2005 |
|
RU2327137C2 |
| МИКРОТВЕРДОМЕР | 2001 |
|
RU2231041C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2012 |
|
RU2510009C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФРИКЦИОННОЙ УСТАЛОСТИ ПОВЕРХНОСТЕЙ ПРИ ЛИНЕЙНОМ КОНТАКТИРОВАНИИ | 1997 |
|
RU2130601C1 |
| СПОСОБ ФОРМИРОВАНИЯ МИКРОРЕЛЬЕФА НА ПОВЕРХНОСТИ ДЕТАЛИ | 2005 |
|
RU2297314C2 |
Изобретение относится к машиностроению. Устройство содержит корпус с электродвигателем и редуктором внутри его; укрепленные на корпусе две параллельные колонны с установленной на них с возможностью перемещения по ним траверсой вместе с механизмами фиксации ее на колоннах и закрепленной на ней инструментом; инструментальной головкой, механизмом установки инструмента, механизмом подвода и отвода инструмента от поверхности образца, измерителем нормальных перемещений инструмента, датчиком нормальной силы, механизм и стол для установки и термостабилизации образца; механизм нормального нагружения инструмента; автоматизированную систему задания программы нагружения и разгружения, считывания, записи и обработки информации результатов испытаний совместно с персональным компьютером. Устройство дополнительно снабжено механизмом тангенциального перемещения образца; механизмом поворота образца в вертикальной плоскости; механизмом тонкого перемещения образца в вертикальной плоскости; механизмом ускоренного перемещения и фиксации инструмента; датчиком измерения тангенциальной силы; механизмом вертикального перемещения траверсы. Сущность: используют программу выбора вида исследования и его проведения из возможных нескольких автоматически реализуемых на одном и том же устройстве, как профилографирование-профилометрирование шероховатости образца; оценку микротвердости поверхности образца; оценку энергии активации пластической деформации; трибометрирование; прогнозирование остаточного ресурса; профилографирование-профилометрирование волнистости поверхности образца и осуществляют с помощью устройства выбранное исследование. Технический результат: расширение технических возможностей, упрощение и ускорение операций. 2 н. и 6 з.п. ф-лы, 19 ил.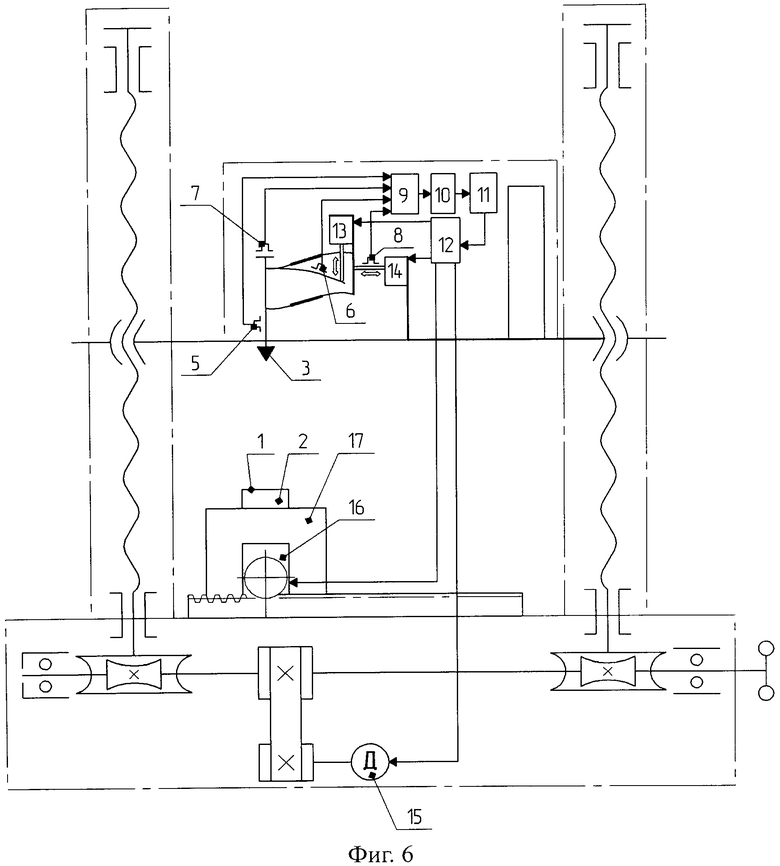
1. Способ определения прочностных характеристик материала, при котором испытание проводят на поверхности образцов, отличающийся тем, что используют программу выбора вида исследования и его проведения из возможных нескольких автоматически реализуемых на одном и том же устройстве, как профилографирование - профилометрирование шероховатости образца; оценку микротвердости поверхности образца; оценку энергии активации пластической деформации; трибометрирование; прогнозирование остаточного ресурса (по текущему значению либо кинетике изменения энергии активации пластической деформации); профилографирование - профилометрирование волнистости поверхности образца; включают блок обработки информации персонального компьютера, загружают рабочую программу выбора вида исследования и его проведения; поворачивают ручку фиксации инструмента в положение «измерение», отводя кулачком подвеску; обезжиренный и высушенный образец размещают на столике исследуемой поверхностью перпендикулярно оси движения инструмента; устанавливают соответствующий инструмент в державке; вводят требуемые исходные данные и режимы исследования в рабочую программу выбора вида исследования и его проведения; нажимают кнопку «старт» окна рабочей программы выбора вида исследования и его проведения; опускают траверсу с инструментальной головкой до соприкосновения инструмента с исследуемой поверхностью образца, определяя его момент касания по показаниям датчика вертикальных перемещений инструмента; двигателем горизонтального перемещения каретки перемещают каретку на расстояние выхода вершины инструмента из деформированной области исследуемой поверхности до нулевых показаний датчика вертикальных перемещений инструмента; реализуют алгоритм дальнейших действий согласно результату выбора видов исследований.
2. Способ по п.1, отличающийся тем, что после выбора вида исследований - оценка микротвердости поверхности образца вводят требуемое число измерений, величину нормальной нагрузки; устанавливают инструмент - стандартный алмазный индентор Виккерса (четырехгранную пирамиду с углом при вершине 136°); включают двигатель нагружения; давят на свободный конец плоской пружины датчика нагружения подвески; одновременно строят график зависимости «нормальная нагрузка FN[H] - величина внедрения инструмента-индентора h [мкм] в исследуемую поверхность» (h=f(FN)); одновременно вычисляют значение микротвердости по формуле 
3. Способ по п.1, отличающийся тем, что после выбора вида исследований - профилографирование - профилометрирование шероховатости поверхности образца при выборе требуемого режима исследования задают базовую длину трассы сканирования поверхности; устанавливают инструмент - алмазную иглу с углом при вершине 60° в державку; автоматически включают двигатель горизонтального перемещения каретки; перемещают инструмент - алмазную иглу по исследуемой поверхности в режиме сканирования (без приложения нормальной нагрузки) на величину базовой длины; одновременно на экране компьютера строят график зависимости «вертикальное перемещение инструмента - алмазной иглы - горизонтальное перемещение исследуемого образца» в режиме реального времени; при задании нескольких чисел заданных измерений действие повторяют заданное число раз; выводят на экран среднюю линию профиля, линии впадин и выступов, кривую опорной поверхности; рассчитывают и выводят на экран монитора параметры R2 - высоту шероховатости, Ra - среднеарифметическое отклонение, tm - шаг; найденные значения критериев профиля шероховатости исследуемой поверхности образца сохраняют в памяти блока обработки информации; возвращают каретку в исходное положение; поворачивают ручку фиксации инструмента - алмазной иглы в положение «хранение», приподнимая при этом подвеску; сохраняют результаты вычислений в памяти блока обработки информации.
4. Способ по п.1, отличающийся тем, что после выбора вида исследований - оценка энергии активации пластической деформации выбирают требуемый критерий измерений - по заданной величине нормальной нагрузки или внедрения инструмента-индентора; вводят в рабочую программу в зависимости от выбора требуемого критерия измерений значение нормальной нагрузки или глубины внедрения инструмента-индентора при царапании, значение молярного объема материала исследуемого образца, числа измерений, требуемой длины царапины; устанавливают инструмент - четырехгранную пирамиду с углом при вершине 136° в державку; включают двигатель нормального нагружения; нагружают подвеску по нормали до заданной величины нормальной нагрузки или до заданной величины внедрения инструмента-индентора в поверхность исследуемого образца - в зависимости от выбора требуемого критерия измерений; включают двигатель горизонтального перемещения каретки; царапают инструментом-индентором поверхность исследуемого образца на заданную величину; одновременно измеряют силу царапания; вычисляют величину энергии активации пластической деформации; возвращают каретку в исходное положение; сохраняют текущее значение энергии активации пластической деформации в памяти блока обработки информации.
5. Способ по п.1, отличающийся тем, что после выбора вида исследований - прогнозирование остаточного ресурса задают начальное значение энергии активации пластической деформации поверхностного слоя и величину энергии активации разрушения материала поверхностного слоя; выбирают вид прогнозирования (по текущему значению энергии активации пластической деформации или по кинетике изменения энергии активации пластической деформации); при прогнозировании по текущему значению энергии активации пластической деформации определяют ожидаемое время наступления разрушения tpec и остаточный ресурс материала δ по формулам:
где tэксп - длительность наработки материала в единицах времени; U0, 

6. Способ по п.1, отличающийся тем, что после выбора вида исследований - трибометрирование задают величину нормальной нагрузки, скорость, амплитуду и время перемещения каретки; устанавливают инструмент - сферический индентор в державку; наносят слой смазочного материала на поверхность исследуемого образца; включают автоматически двигатель нагружения; давят на инструмент - сферический индентор нормальной силой до заданной величины с фиксированием датчиком нагружения подвески нормальной силой; включают двигатель продольного перемещения в режиме возвратно-поступательного движения с заданной скоростью, амплитудой и временем испытаний; измеряют силу трения по показаниям датчика тангенциальной силы, нормальную силу, действующую на инструмент - индентор, величину перемещения инструмента-индентора относительно поверхности исследуемого образца, величину линейного износа по разности показаний датчика вертикальных перемещений инструмента-индентора; возвращают инструмент -индентор и каретку в исходное положение; сохраняют результат вычислений в памяти блока обработки информации.
7. Способ по п.1, отличающийся тем, что после выбора вида исследований - профилографирование - профилометрирование волнистости поверхности образца при выборе требуемого режима исследования задают длину трассы сканирования поверхности образца; устанавливают инструмент - алмазную иглу с углом при вершине 60° в державку; автоматически включают двигатель горизонтального перемещения столика вместе с образцом на величину длины трассы сканирования (без приложения нормальной нагрузки); одновременно с перемещением образца строят график на экране компьютера зависимости «вертикальное перемещение инструмента - горизонтальное перемещение исследуемого образца» в режиме реального времени; при задании нескольких чисел заданных измерений действие повторяют заданное число раз; выводят на экран среднюю линию профиля, линии впадин и выступов; рассчитывают параметры Wz - высоту волнистости Sw - шаг волнистости; найденные значения критериев профиля волнистости исследуемой поверхности образца сохраняют в памяти блока обработки информации; возвращают каретку и инструмент - алмазную иглу в исходное положение; поворачивают ручку фиксации инструмента - алмазной иглы в положение «хранение», приподнимая при этом подвеску; сохраняют результаты вычислений в памяти блока обработки информации.
8. Устройство для определения прочностных характеристик материала по п.1, содержащее корпус коробчатой пустотелой формы с электродвигателем и редуктором внутри его; укрепленные на корпусе две параллельные колонны с установленной на них с возможностью перемещения по ним траверсой вместе с механизмами фиксации ее на колоннах и закрепленной на ней инструментом; инструментальной головкой, механизмом установки инструмента, механизмом подвода и отвода инструмента от поверхности образца, измерителем нормальных перемещений инструмента, датчиком нормальной силы, механизм и стол для установки и термостабилизации образца; механизм нормального нагружения инструмента; автоматизированную систему задания программы нагружения и разгружения, считывания, записи и обработки информации результатов испытаний совместно с персональным компьютером, отличающееся тем, что оно дополнительно снабжено механизмом тангенциального перемещения образца; механизмом поворота образца в вертикальной плоскости; механизмом тонкого перемещения образца в вертикальной плоскости; механизмом ускоренного перемещения и фиксации инструмента; датчиком измерения тангенциальной силы; механизмом вертикального перемещения траверсы; при этом механизм и стол для установки и термостабилизации образца выполнен в виде столика и плиты, установленной на корпусе устройства, соединенных между собой механизмом тангенциального перемещения образца, выполненного, в свою очередь, в виде нижнего корпуса, соединенного с плитой с возможностью перемещения по ее продольным направляющим посредством шагового электродвигателя, расположенного в нижнем корпусе, и реечной передачи, реечная шестерня которой закреплена на роторе шагового электродвигателя, а рейка - на плите, и механизмом поворота образца в вертикальной плоскости, скрепленного столиком, выполненным в виде верхнего клина и нижнего клина, установленного на верхнем корпусе с возможностью перемещения по его направляющим посредством вращения рукоятки ходового винта, закрепленного в подшипнике верхнего корпуса и связанного с резьбовым отверстием нижнего клина; причем верхний клин соединен посредством плоской и витой пружин с нижним корпусом с возможностью поворота относительно его посредством механизма поворота образца в вертикальной плоскости, состоящего из маховика - рукоятки винта, имеющего возможность вращения в гайке, закрепленной на нижнем корпусе, и упираться сферическим концом в пяту, закрепленную в верхнем корпусе; а механизм вертикального перемещения траверсы выполнен в виде шагового электродвигателя, редуктора, включающего ременную передачу, промежуточный вал с двумя червяками на его концах и два червячных зубчатых колеса на двух ходовых винтах, пропущенных внутри соответствующих двух колонн и внутрь корпуса, двух ходовых гаек, закрепленных на двух жестко скрепленных с траверсой ползушках, установленных на соответствующих колоннах по подвижной посадке с возможностью фиксации на них посредством механизмов фиксации траверсы; механизм ускоренного перемещения и фиксации инструмента выполнен в виде дискового кулачка и рукоятки его поворота; механизм нормального нагружения инструмента и механизм тангенциального перемещения инструмента выполнены в виде каретки, подвешенной на попарных плоскопараллельных пружинах с возможностью перемещения, в двух взаимно перпендикулярных направлениях, посредством соответствующих двух перпендикулярно установленных линейных шаговых электродвигателей.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2277232C1 |
| СПОСОБ ОЦЕНКИ ЭНЕРГИИ АКТИВАЦИИ РАЗРУШЕНИЯ МАТЕРИАЛА ПОВЕРХНОСТНОГО СЛОЯ | 2005 |
|
RU2327137C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛОВ МЕТОДОМ ЦАРАПАНИЯ | 2008 |
|
RU2373515C1 |
| US 6301956 B1, 16.10.2001. | |||

