Изобретение относится к устройствам для исследования и определения механических свойств материалов путем приложения к ним механических усилий, а именно к микротвердомерам, реализующих автоматическую регистрацию диаграммы вдавливания индентора в материал в координатах “сила (нагрузка) - глубина отпечатка”.
Изобретение может быть использовано в лабораториях металлургических, машиностроительных, приборостроительных, авиационных, космических, судостроительных, химических и газовых предприятий для контроля, анализа и оценки микротвердости, микрохрупкости, упругости, пластичности, микроползучести и т.д.
Известен микротвердомер, включающий в себя основание со стойкой, двухкоординатный предметный столик и размещенный на стойке механизм нагружения. Последний выполнен в виде упругих направляющих (пружинный параллелограмм) со штоком, индентором и средствами измерения (датчиками) деформации пружин и перемещений индентора. Корпус средства измерения перемещений размещен на стойке (см. сб. "Новое в области испытания на микротвердость". Наука, 1974, с.100-107).
Микротвердомер не обеспечивает сохранение постоянства усилий в материале образца на стадии регистрации участка диаграммы "Выдержка под нагрузкой". Это проявляется в том, что в момент прекращения нагружения до выбранной максимальной нагрузки, испытываемый материал находится не под постоянной силой пружин, а под действием их ослабевающего действия вследствие роста глубины отпечатка. В этом случае обеспечивается методически неверная регистрация участка диаграммы микроползучести. Особенно это проявляется при испытании материалов, обладающих способностью к ползучести при комнатной температуре.
Существенным недостатком микротвердомера является неудачный выбор схемы расположения корпуса средства измерения глубины отпечатка на стойке прибора. При подобном базировании датчика измерения перемещений индентора регистрируется не только глубина отпечатка в испытываемом материале, но и контактные деформации в сочленении: алмазное зерно - оправка - испытываемый образец материала - предметный столик - основание микротвердомера. Следствием этого является получение завышенного значения размера глубины отпечатка, а следовательно, заниженной микротвердости. Возникающая в этом случае погрешность микротвердости возрастает с ростом числа механических сочленений узлов, входящих в измерительную цепь датчика перемещений индентора и с уменьшением контактной жесткости этих сочленений.
Известен прибор для определения механических свойств материалов (см. авт. свид. СССР №1147950, кл. G 01 N 3/42, 1985), содержащий измеритель глубины отпечатка, выполненный в виде охватывающей шток опоры, связанной с корпусом парой плоскопараллельных пружин и установленный с возможностью контакта с поверхностью испытываемого образца под действием силы, развиваемой плоскопараллельными пружинами.
В известном приборе не в полной мере решена задача замыкания цепи измерения глубины отпечатка (образец - предметный столик - основание прибора). Особенность способа нагружения в устройстве предполагает увеличение силы прижима опоры к поверхности образца в процессе работы на приборе. За счет возрастающего усилия, развиваемой плоскопараллельными пружинами, на которых закреплена опора, последняя со средством измерения перемещений индентора находится не в статическом, а в некотором возмущенном неустойчивом состоянии. Последнее в силу конструктивных особенностей плоскопараллельных пружин (пружинного паралеллограмма) при возрастающем давлении на нем приводит к возникновению горизонтального смещения опоры по плоскости образца, возникновению ее перекосов и поворотов. Подобное состояние приводит, как правило, к нестабильному контактированию опоры с поверхностью образца. В результате этого регистрация диаграммы деформации в координатах "сила - глубина отпечатка" происходит с нестабильным ходом кривых участков "нагружение" и "разгружение".
В известной конструкции прибора также не обеспечивается постоянство нагрузки при регистрации участка диаграммы, характеризующего процесс микроползучести материала. Запись этого участка происходит под действием ослабевающего действия пружин, несущих шток с индентором.
Частично разрешив вопрос о контактных деформациях системы "образец - предметный столик - основание прибора" в известном приборе не решена задача исключения из цепи измерения средства измерений перемещений индентора упругих деформаций как оправки индентора в посадочном отверстии штока, так и алмазного зерна вследствие нежесткости его заделки в оправке.
Наиболее близким по технической сущности и достигаемому результату к заявляемому прибору является микротвердомер, содержащий основание с предметным столиком, стойку, траверсу, установленную на стойке с возможностью вертикального перемещения, направляющую в форме стакана, с осевым отверстием в днище под индентор. В полости последнего размещен механизм нагружения. В нижней части стакана установлен магнитоуправляемый датчик перемещений индентора, постоянный магнит которого размещен на нерабочей плоскости индентора. Стакан установлен с возможностью осевого перемещения и контактирования с образцом нижней торцевой поверхностью. Каретка со сменными грузами установлена в полости стакана с возможностью вертикального перемещения посредством жесткого арретира узла привода нагружения. Последний установлен на верхней утолщенной поверхности стакана (свидетельство РФ на полезную модель №6065, 6 G 01 N 3/48, 1998).
К причинам, препятствующим достижению требуемого технического результата при использовании настоящей полезной модели, относится то, что в известном приборе (прототипе) присутствует зависимость показаний датчика перемещений, зафиксированного в корпусе стакана, от контактной жесткости сочленения между нижней торцевой плоскостью стакана и поверхностью испытываемого образца. В момент контакта на стакане сосредоточена масса каретки с механизмом нагружения и дополнительными грузами, удерживаемая арретиром механизма привода нагруженном стакана. В период работы на приборе происходит плавное и постепенное освобождения стакана от этой массы, переносимой арретиром со стакана на плоскость образца. Жесткость контакта стакана с образцом уменьшается и он испытывает упругие перемещения (восстанавливающую деформацию) в точках сочленения, образующих контурные площади контакта. Средство измерения перемещений индентора, размещенное в корпусе стакана, регистрирует эти упругие контактные перемещения. При этом в электрической цепи датчика помимо полезного сигнала, пропорционального глубине отпечатка, появляется и мешающий сигнал, пропорциональный этой восстанавливающей деформации. В результате возникает погрешность измерения глубины отпечатка и, следовательно, микротвердости. Последняя тем больше, чем больше упругие деформации, возникающие в стыке стакан - плоскость образца.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании микротвердомера с таким конструктивным выполнением, которое позволило бы исключить погрешность измерения глубины внедрения индентора в материал и повысить производительность испытания.
Поставленная задача достигается тем, что направляющая с конфигурацией стакана и установленным на нем узлом привода, нагруженном с арретиром, жестко закреплена на траверсе. При этом средство измерения перемещений индентора размещено в корпусе дополнительной направляющей опоры. В последней коаксиально установленной в стакане с возможностью вертикального движения соосно размещена каретка с узлом нагружения. Каретка установлена в опоре с возможностью вертикального перемещения арретиром механизма привода нагружением. Связь опоры с кареткой осуществлена через свободный контакт посредством второго арретирующего звена, выполненного в виде регулировочного микровинта, размещенного в верхнем торце опоры, и установленного с возможностью освобождения ее от контакта с кареткой при замыкании опоры с плоскостью образца.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном решении. Технический результат выражается в снабжении конструкции микротвердомера, во-первых, дополнительной направляющей опоры с зафиксированным на ней средством измерения перемещений индентора и установленный с возможностью контактирования с плоскостью испытываемого образца материала. При этом стакан с механизмом привода нагружением арретиром установлен на траверсе жестко, а не посредством упругой или иных связей. Во-вторых, введено дополнительное арретирующее звено, выполняющее две основные функции: задачу установки опоры на плоскость образца с последующим освобождением опоры от силовых элементов прибора и задачу регулировки необходимого гарантированного зазора между вершиной индентора механизма нагружения и нижней контактной плоскостью опоры. Следовательно, заявленный микротвердомер удовлетворяет критерию изобретения “новизна”.
Проведенный заявителем дополнительный поиск известных технических решений, обусловленных наличием в них указанных признаков, показал следующее. Не все признаки отличительной части формулы найдены в известных технических решениях. Так, направляющая опора со средством измерения перемещений при установке ее на плоскость образца оказалась развязанной от массы каретки с механизмом нагружения.
Сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства направляющей опоры со средством измерения перемещений индентора, не совпадающие со свойствами, проявляемыми указанными признаками в известном прототипе. В процессе испытания опора находится не в возмущенном (возникновение упругой реакции в месте контакта с плоскостью образа), а в статически равновесном (устойчивом) состоянии, свободном от воздействий силовых элементов прибора. Размещение на опоре второго арретирующего узла привела к возможности установки сколь угодно малого гарантированного зазора между нижней плоскостью опоры и плоскостью образца. Перечисленные свойства заявляемого решения позволили исключить из цепи датчика перемещений при записи диаграмм вдавливания мешающих контактных и иных “паразитных” деформаций и повысить производительность испытания на микротвердомере, что обусловило достижение положительного эффекта. Следовательно, заявленное техническое решение удовлетворяет критерию изобретения “существенные отличия”.
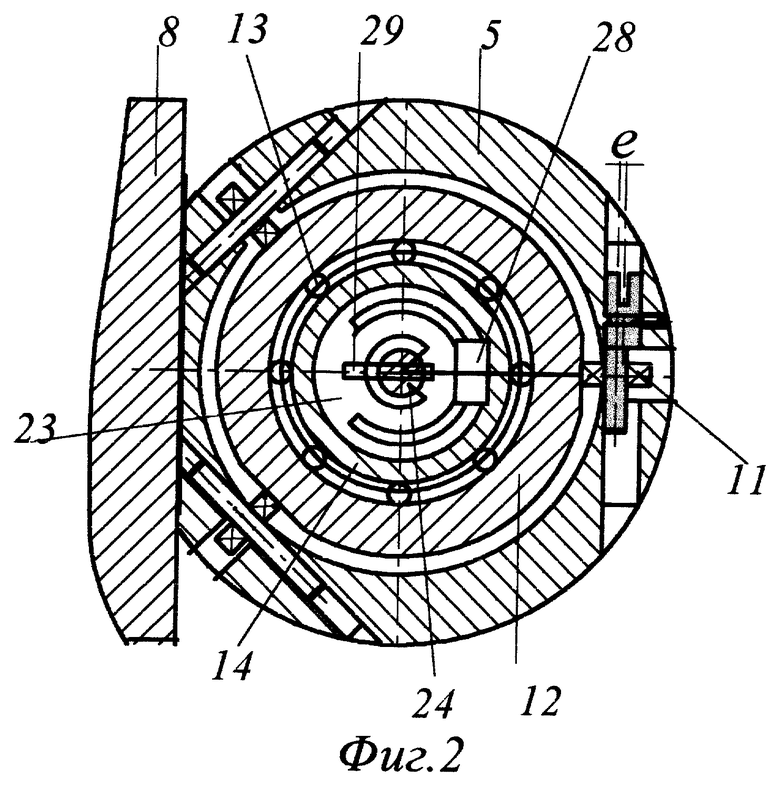
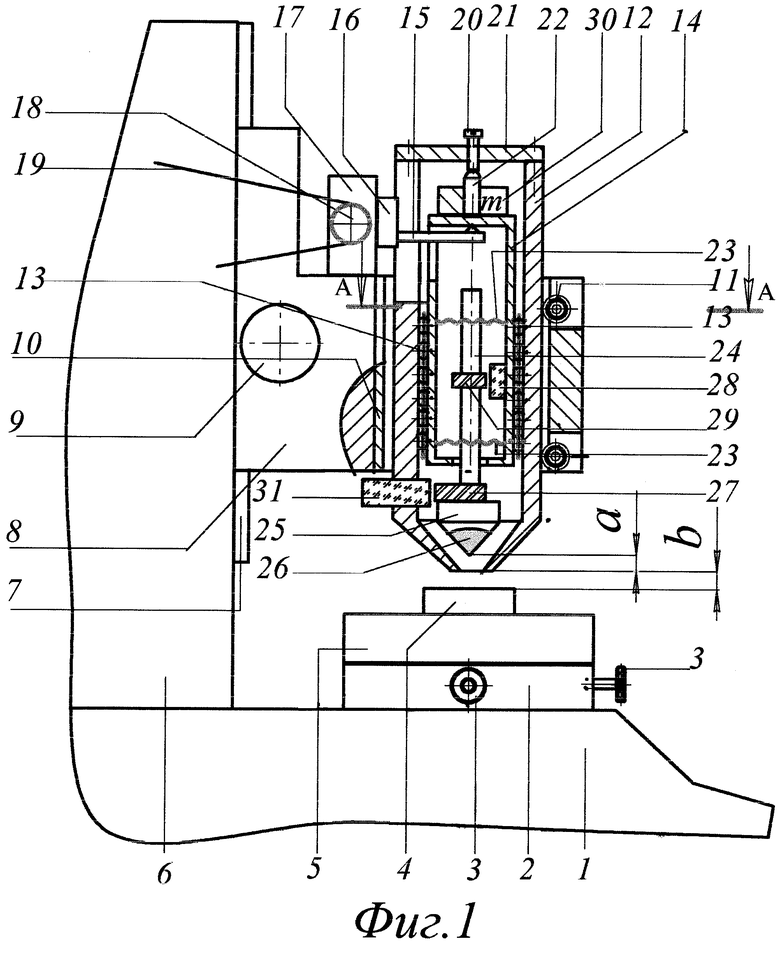
На фиг.1 представлена схема заявленного микротвердомера; на фиг.2 показан разрез по А-А фиг.1, а на фиг.3 - принцип его работы.
Микротвердомер содержит основание 1, предметный столик 2 с установочными микровинтами 3, испытываемый образец 4, размещенный на подвижной плите 5 столика, и жестко зафиксированную на основании стойку 6 с направляющей для прямолинейного движения 7. Последняя выполнена по схеме направляющей с трением скольжения конфигурации типа “ласточкин хвост” с установленной на ней траверсой 8. Перемещение траверсы по направляющей стойки осуществляется кремарьерой 9. На траверсе жестко зафиксирован стакан 10, выполненный в форме цилиндрической направляющей с трением качения на трех парах роликах 11 (фиг.1, 2), по которым осуществляется вертикальное перемещение опоры 12 с конусообразной частью в нижней ее части. Для легкости хода опоры в качестве роликов использованы шарикоподшипники. Для регулировки высокой точности ее перемещения по стакану одна из пар роликов исполнена с силовым замыканием роликов за счет эксцентриситета “е” оси с шарикоподшипником относительно основной регулировочной оси (позиция 11, фиг.2). Внутренняя полость опоры также выполнена в форме цилиндрической направляющей с трением качения на шариках 13 с сепаратором, по которым осуществляется вертикальное перемещение каретки 14. Для строго вертикального перемещения последней в конструкции этого типа направляющей предусмотрена возможность предохранения ее от поворота вокруг оси (на чертежах не показано).
Автоматический подъем и опускание каретки производится жестким арретиром 15. Последний представляет собой рычаг, один конец которого свободно контактирует с внутренней опорной поверхностью каретки, а второй жестко зафиксирован на ползуне 16 узла привода нагружением 17, корпус которого установлен на траверсе прибора. Перемещение ползуна осуществляется вращением трибки узла привода 18, соединенного ременной передачей 19 с выходным валом редуктора реверсивного электродвигателя (не показан).
В собранном виде опора 12 и каретка 14 образуют два коаксиально расположенных узла с возможностью одновременного перемещения с помощью арретира 15. При этом механическая связь опоры с кареткой реализована через свободный контакт микровинта 20, размещенным на верхней плате 21 опоры, с штырем 22 каретки.
Внутри блока каретки размещен механизм нагружения. Он состоит из двух упругих шайб 23, штока 24 и оправки 25 с алмазным индентором 26. Последний зачеканен в оправке таким образом, что имеется свободный доступ к плоской (нерабочей) грани алмаза. При этом на этой грани закреплен управляющий постоянный магнит 27 средства измерения перемещений индентора. Способ и конструктивные особенности контактирования магнита с нерабочей гранью алмазного индентора в настоящем патенте не раскрываются.
Внешние диаметры упругих шайб жестко закреплены в корпусе каретки 14, а их внутренние диаметры несут шток. Для регистрации упругих деформаций шайб (регистрация силы) применен магнитоуправляемый электронный преобразователь (МУП) 28. Его корпус установлен в каретке, а управляющий элемент (постоянный магнит) 29 размещен на штоке. В собранном виде упругие шайбы образуют упругий квазипараллелограмм с суммарной жесткостью пружин "С". Последние выполняют двоякую функцию, во-первых, они являются упругими направляющими, обеспечивающими строго вертикальное перемещение штока с алмазной пирамидой при ее внедрении в испытываемый материал, и, во-вторых, являются тем упругим динамометрическим элементом, с помощью которого производится плавное и непрерывное приложение усилий к образцу за счет упругой деформации шайб. При этом датчик вместе с шайбами проградуирован в единицах силы, а его выходной электрический сигнал подключен к координате Y регистрирующего устройства.
Общая масса каретки вместе с шайбами, штоком, оправкой, индентором и магнитом является той минимальной массой, прикладываемой к испытываемому образцу в процессе испытания при полном приложении нагрузки к образцу, которая регистрируется датчиком при выходе арретира из контакта с кареткой. Для увеличения массы применяется дополнительный сменный груз 30 массой m, прикладываемого к верхнему торцу каретки.
По своему функциональному назначению цилиндрическая опора 12 представляет собой узел регистрации перемещений индентора. Средством для регистрации этих перемещений является второй магнитоуправляемый электронный преобразователь (МУП) 31, смонтированный в корпусе опоры. Управление траекторией движения электронов в этом датчике осуществляется постоянным магнитом 27, контактирующим с зерном алмазного индентора 26. Прогадуирован МУП в микроперемещениях, а его выходной электрический сигнал подключен к координате регистрирующего устройства Х.
Перед испытанием на приборе между острием индентора 26 и нижней торцевой конусообразной частью трубки имеется зазор а. Его регулировка осуществляется микровинтом 20 подъемом или опусканием опоры 12 относительно каретки 14 таким образом, чтобы величина этого зазора была бы приблизительно в 10 раз меньше предполагаемого максимального диапазона регистрации глубины отпечатка. Расстояние b между нижней конусообразной торцевой поверхностью цилиндрической опоры и поверхностью испытываемого образца порядка 0,1-0,2 мм.
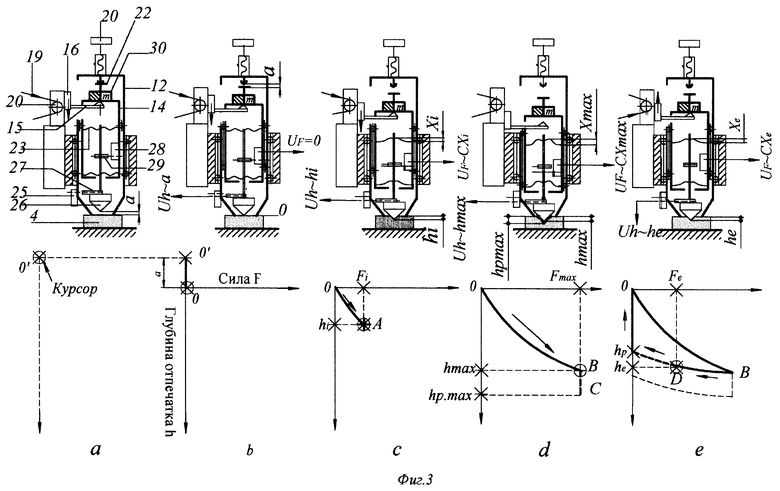
На фиг.3 показаны схемы микротвердомера, поясняющие принцип его действия на различных этапах испытания. Необходимые для описания работы прибора обозначения узлов и деталей соответствуют обозначениям на фиг.1-2.
В исходном состоянии выходные электрические цепи датчиков силы и перемещений индентора подключены к соответствующим координатам графопостроителя (или к интерфейсу АЦП компьютера). Их выходные сигналы равны нулю и в поле регистрации диаграммы зафиксировано начальное положение курсора (или пера самописца графопостроителя) 0' (фиг.3-а).
В момент включения электродвигателя ременной передачей 19 осуществляется вращение трибки 18, передающей вертикальное перемещение ползуну 16 с жестким арретиром 15. Последний передает поступательное движение к плоскости образца каретки 14, несущей с помощью микровинта 20 цилиндрическую опору 12 со средством измерения перемещений индентора 25. До момента касания опоры 12 с плоскостью образца 4, когда происходит выборка зазора b между плоскостью образца и опорой, электрические сигналы обоих датчиков, а следовательно, и курсор остаются на первоначальном нулевом уровне (точка 0', фиг.3-а).
После полной выборки зазора b и при дальнейшем перемещении арретира 15 к плоскости образца конусообразная часть цилиндрической опоры 12 всей своей массой прикладывается к поверхности образца 4 (фиг.3-а). Этот момент времени соответствует началу освобождения опоры 12 от каретки 14 с арретиром 15. Выходные сигналы средств измерений сил и перемещений к этому моменту времени остаются равными нулю, положение курсора занимает прежнее место (точка 0' на фиг.3-а), и опора всей своей массой неподвижно контактирует с поверхностью образца 4.
При дальнейшем движении арретира упор 22 каретки 14 полностью выходит из контакта с микровинтом 20 и перемещение каретки происходит до тех пор, пока не произойдет полная выборка зазора a между острием индентора 26 и поверхностью образца (фиг.3-b). В этот период времени выходной сигнал датчика силы 28 остается равным нулю (UF=0), поскольку никакие силы на упругие шайбы не действуют, а выходной сигнал датчика перемещений 25 пропорционален величине выбираемого зазора “а”. До момента касания острия индентора поверхности образца в поле регистрации диаграммы вычерчивается линия 0'0 (фиг.3-b), размер которой пропорционален величине зазора a.
В момент касания вершины индентора поверхности образца и при дальнейшем движении каретки 14 упругие направляющие 23 начинают прогибаться (фиг.3-с). Величина этого прогиба Xi фиксируется датчиком усилий 28 и в его электрической цепи появляется электрический сигнал UF=сХi. В то же время в электрической цепи датчика перемещений 25 регистрируется электрический сигнал Uh, пропорциональный перемещению hi индентора в материале. В результате в поле записи диаграммы вычерчивается кривая ОА, характеризующая процесс вдавливания индентора в поверхность испытываемого материала. При этом точка перелома кривой ОА с осью абсцисс (точка О) определяет начало отсчета глубины отпечатка hi, а точка кривой А глубину отпечатка hi, полученной от действия силы упругих шайб Fi. Величина этой силы F = CXi, где С - суммарная жесткость упругих шайб 23, а Xi - деформация этих шайб.
В момент времени, когда сопротивление со стороны испытываемого образца материала 4 уравновесится общей массой каретки 14 с грузом 30, жесткий арретир 15 выйдет из контакта с кареткой 14 (фиг.3-d). Через 2-3 секунды работа электродвигателя прекращается и между арретиром 15 и внутренней поверхностью каретки 14 образуется зазор порядка 0.25-0.5 мм. Начиная с этого момента, испытываемый материал оказывается под постоянной нагрузкой Fmах. Последняя за вычетом потерь на трение качения в направляющих каретки складывается из массы каретки 14 и массы m сменного груза 30. В случае способности испытываемого материала к микроползучести при комнатной температуре в поле записи диаграммы вычерчивается горизонтальный участок ВС (фиг.3-d), характеризующий собой процесс прироста глубины отпечатка (микроползучесть) под действием постоянной нагрузки Fmах за заданное время выдержки материала под этой нагрузкой.
Снятие нагрузки (общей массы груза и каретки) с образца материала осуществляется реверсированием электродвигателя. При этом арретир 15 входит в контакт с кареткой 14, осуществляя ее подъем, действие пружин 23 на образец материала начинает ослабевать и в цепи средства измерения сил 28 появляется выходной сигнал UF, пропорциональный степени ослабления действия пружин СХе. В поле записи происходит регистрация участка диаграммы BD, характеризующего процесс упругого восстановления глубины отпечатка (he) при уменьшении силы на инденторе от Fmax до Fe (фиг.3-е, точка D).
При дальнейшем подъеме арретиром каретки 14 происходит выход боковой поверхности индентора 26 из контакта с материалом (точка hp на диаграмме), пружины 23 возвращаются в свое исходное равновесное состояние (фиг.3-а, b), и выходной сигнал средства измерения их деформации 28 становится равным нулю (UF=0). Через определенный момент времени произойдет контакт штыря каретки 22 с установочным винтом 20 (фиг.3-а), произойдет подъем цилиндрической опоры 12 с поверхности испытываемого образца и система придет к своему исходному положению с первоначальным зазором b между поверхностью образца 4 и нижней конусообразной частью цилиндрической опоры 12 (фиг.1).
Предлагаемый микротвердомер позволяет повысить точность отсчета по диаграмме вдавливания глубины отпечака, а следовательно, и расчет микротвердости по этому параметру. Эффект достигается за счет замкнутости опоры с механическими узлами, составляющих измерительную цепь датчика перемещений в периоды нагружения и разгрузки индентора, а также сохранения устойчивости этой опоры с датчиком в эти периоды работы на микротвердомере.
При работе на приборе положение диаграммы вдавливания в поле записи графопостроителя или на экране монитора четко определено гарантированным зазором между вершиной индентора и контактной плоскостью опоры. Это обеспечено регулировочным винтом второго арретирующего звена опоры. Введение последнего позволило повысить производительность испытания. Эффект достигается непрерывной автоматической, а не ручной установкой опоры на плоскость образца с последующей выборкой гарантированного зазора и дальнейшими нагружением - разгрузкой индентора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микротвердомер | 1975 |
|
SU672540A1 |
| МИКРОЗОНД | 1992 |
|
RU2029283C1 |
| Прибор для испытаний материалов на микротвердость | 1990 |
|
SU1793294A1 |
| Микротвердомер | 1990 |
|
SU1803810A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2499246C2 |
| МИКРОТВЕРДОМЕР С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1964 |
|
SU164695A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ШПИЛЕК ПАРОВЫХ ТУРБИН | 1991 |
|
RU2067753C1 |
| Акустический способ измерения микротвердости | 1988 |
|
SU1744586A2 |
| ИНДЕНТАЦИОННОЕ УСТРОЙСТВО, АВТОМАТИЗИРОВАННАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ ИНДЕНТАЦИОННЫМ МЕТОДОМ | 2015 |
|
RU2621935C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ И ЭКСПЛУАТАЦИОННЫХ СВОЙСТВ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2128330C1 |
Изобретение относится к устройствам для исследования и определения механических свойств материалов путем приложения к ним механических усилий, а именно к микротвердомерам, регистрирующих диаграммы вдавливания индентора в материал в координатах “сила - глубина отпечатка”. Микротвердомер содержит основание с предметным столиком, стойку, установленную на стойке траверсу, первую направляющую в форме стакана с осевым отверстием под индентор, в полости которого размещен механизм нагружения с датчиком силы, и установленный в нижней части стакана магнитоуправляемый датчик перемещений индентора, постоянный магнит которого размещен на нерабочей поверхности индентора, каретку со сменными грузами, установленную в полости стакана с возможностью вертикального перемещения посредством жесткого первого арретирующего звена узла привода нагружения в виде арретира, который установлен на верхней утолщенной поверхности стакана. В микротвердомер дополнительно введены вторая направляющая, выполненная в виде опоры, коаксиально установленная в стакане с возможностью вертикального перемещения относительно него, и второе арретирующее звено, выполненное в виде регулировочного микровинта, размещенного в верхнем торце опоры, и обеспечивающего возможность освобождения опоры от контакта с кареткой при замыкании опоры с плоскостью образца, при этом стакан жестко закреплен на траверсе, магнитоуправляемый датчик перемещений индентора размещен в корпусе опоры, а каретка со сменными грузами и механизм нагружения соосно размещены в полости опоры с возможностью вертикального перемещения относительно нее. Данное изобретение направлено на создание микротвердомера, для которого исключена погрешность измерения глубины внедрения индентора в материал и повышена производительность испытания. 3 ил.
Микротвердомер, содержащий основание с предметным столиком, стойку, установленную на стойке траверсу, первую направляющую в форме стакана с осевым отверстием под индентор, в полости которого размещен механизм нагружения с датчиком силы, и установленный в нижней части стакана магнитоуправляемый датчик перемещений индентора, постоянный магнит которого размещен на нерабочей поверхности индентора, каретку со сменными грузами, установленную в полости стакана с возможностью вертикального перемещения посредством жесткого первого арретирующего звена узла привода нагружения в виде арретира, который установлен на верхней утолщенной поверхности стакана, отличающийся тем, что в микротвердомер дополнительно введены вторая направляющая, выполненная в виде опоры, коаксиально установленная в стакане с возможностью вертикального перемещения относительно него, и второе арретирующее звено, выполненное в виде регулировочного микровинта, размещенного в верхнем торце опоры и обеспечивающего возможность освобождения опоры от контакта с кареткой при замыкании опоры с плоскостью образца, при этом стакан жестко закреплен на траверсе, магнитоуправляемый датчик перемещений индентора размещен в корпусе опоры, а каретка со сменными грузами и механизм нагружения соосно размещены в полости опоры, с возможностью вертикального перемещения относительно нее.
| Двухлопастной водяной или воздушный гребной винт с поворотными лопастями | 1926 |
|
SU6065A1 |
| ПРИБОР С АВТОМАТИЧЕСКОЙ УСТАНОВКОЙ НУЛЯ | 1992 |
|
RU2079127C1 |
| Прибор для определения твердости материалов | 1934 |
|
SU43194A1 |
| Автоматический твердомер | 1980 |
|
SU945746A1 |
| Обратный клапан | 1983 |
|
SU1214864A1 |
| US 4019376 А, 26.04.1977 | |||
| Замок для соединения налегающих друг на друга деталей | 1942 |
|
SU63548A1 |
| US 5177999 А, 12.01.1993. | |||

