Область техники
Изобретение относится к системе управления транспортного средства, которая выполнена с возможностью управления характеристиками поведения или характеристиками ускорения/замедления (которые называются "характеристиками движения") транспортного средства, такими как характеристика мощности, характеристика рулевого управления и характеристика подвески транспортного средства, так что характеристики движения совпадают с окружением движения и предпочтениями, и намерениями водителя в отношении движения.
Уровень техники
Хотя поведение транспортного средства, например, скорость и направление движения транспортного средства, варьируется согласно операции ускорения/замедления водителя и операции рулевого управления, взаимосвязь между величиной операции водителя и величиной изменения поведения определяется не только посредством эффективности использования энергии, например, эффективности использования топлива, но также и посредством характеристик, таких как комфорт во время езды, бесшумность и динамические характеристики, которые требуются от транспортного средства. Тем временем окружение, в котором транспортное средство движется, включает в себя различные окрестности или типы дорог, например, городские трассы, скоростную автомагистраль, извилистую дорогу, подъем и спуск, и существует множество предпочтений и намерений водителя в отношении движения, и существует множество впечатлений, которые водитель получает из транспортного средства во время движения. Следовательно, ожидаемая характеристика движения не обязательно получается, если окружение движения изменяется или транспортное средство управляется другим водителем. Как результат, так называемая общая характеристика управляемости может ухудшаться. Таким образом, разработан один тип транспортного средства, который допускает возможность вручную выбирать характеристики движения, например, характеристику выходной мощности (или характеристику ускорения) и характеристику подвески, касающиеся поведения транспортного средства, посредством управления переключателем выбора режима. А именно, транспортное средство допускает возможность вручную выбирать режим вождения, например, из спортивного режима, в котором транспортное средство движется с превосходной способностью к ускорению, и подвеска задается в определенной степени жесткой, нормального режима, в котором транспортное средство ускоряется на относительно низкой скорости и имеет характеристику относительно мягкой подвески, и экономичного режима, в котором приоритезируется экономия или эффективность использования топлива, посредством управления переключателем.
Кроме того, предложены различные системы, которые выполнены с возможностью инструктировать и отражать общий стиль управляемости посредством управления поведением транспортного средства. Этот тип системы не требует операций переключения и разрешает изменения незначительных или подробных характеристик. Например, публикация заявки на патент Японии № 06-249007 (JP-A-06-249007) описывает устройство управления мощности приведения в движение с использованием нейрокомпьютера, выполненного с возможностью распознавать взаимосвязь между ходом акселератора и ускорением, соответствующим скорости транспортного средства, в качестве модели требуемого ускорения, и вычислять величину нажатия педали акселератора на основе разности между этой моделью и моделью второго стандартного ускорения, отражающей намерение водителя, и разности между моделью второго стандартного ускорения и моделью первого эталонного стандартного ускорения.
Технология, описанная на JP-A-06-249007, является технологией для инструктирования более точного отражения предпочтений водителя и намерения водителя посредством рабочих характеристик вождения и характеристик вождения транспортного средства. Тем не менее, технология оставляет запас для улучшения.
Это изобретение предоставляет устройство управления для транспортного средства, которое может лучше адаптировать динамические рабочие характеристики или характеристики вождения транспортного средства к намерению водителя.
Сущность изобретения
Первый аспект изобретения относится к устройству управления для транспортного средства. Устройство управления управляет частотой вращения источника мощности приведения в движение или передаточным отношением трансмиссии, соединенной с выходной стороной источника мощности приведения в движение в транспортном средстве, оснащенном источником мощности приведения в движение и трансмиссией. Устройство управления выполнено с возможностью определения индекса, который основан на состоянии движения транспортного средства, которое соответствует намерению водителя, и управления требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса.
Требуемая частота вращения или требуемое передаточное отношение могут устанавливаться заранее согласно скорости транспортного средства и индексу.
Индекс может быть определен на основе, по меньшей мере, одного из продольного ускорения и поперечного ускорения транспортного средства.
Требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, может быть определена на основе индекса, требуемое ускорение для каждой скорости транспортного средства может быть определено на основе максимального сформированного ускорения и требуемой максимальной величины ускорения для каждой скорости транспортного средства, и требуемая частота вращения или требуемое передаточное отношение может задаваться на основе требуемого ускорения.
В соответствии с изобретением, требуемое ускорение может быть сформировано в ответ на скорость транспортного средства. Следовательно, транспортное средство может легко двигаться согласно намерению водителя как на высоких, так и на низких скоростях транспортного средства.
Требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, может быть определена на основе индекса, требуемое ускорение может быть определено на основе максимального сформированного ускорения и требуемой максимальной величины ускорения в момент времени, в который индекс определяется, и требуемая частота вращения или требуемое передаточное отношение может поддерживаться при значении, при котором достигается это требуемое ускорение.
В соответствии с изобретением, требуемая частота вращения или требуемое передаточное отношение, которое ранее задано, поддерживается. Следовательно, высокие динамические рабочие характеристики и характеристики вождения могут быть получены в соответствии с намерением водителя.
Требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, может быть определена на основе индекса, и когда индекс превышает предварительно определенное значение, требуемое ускорение может быть определено на основе максимального сформированного ускорения и требуемой максимальной величины ускорения в момент времени, в который индекс определяется, и требуемая частота вращения или требуемое передаточное отношение может поддерживаться при значении, при котором достигается это требуемое ускорение.
В соответствии с изобретением, требуемая частота вращения или требуемое передаточное отношение управляется согласно индексу. Следовательно, динамические рабочие характеристики и характеристики вождения, которые не являются ни чрезмерными, ни недостаточными, могут быть получены в соответствии с намерением водителя.
Величина потребности приведения в движение для транспортного средства может быть определена, и целевая частота вращения источника мощности приведения в движение или целевое передаточное отношение трансмиссии может быть дополнительно определено на основе величины потребности приведения в движение, и источник мощности приведения в движение может управляться так, что он имеет либо требуемую частоту вращения, либо целевую частоту вращения, какая из них выше, или трансмиссия может управляться так, что она имеет либо требуемое передаточное отношение, либо целевое передаточное отношение, какое из них выше.
Скорость варьирования частоты вращения источника мощности приведения в движение в случае, если целевая частота вращения превышает требуемую частоту вращения, или скорость варьирования передаточного отношения в случае, если целевое передаточное отношение превышает требуемое передаточное отношение, задается отличающейся в зависимости от индекса.
Когда индекс на основе состояния движения транспортного средства является относительно большим, скорость варьирования частоты вращения или скорость варьирования передаточного отношения может быть выше, чем когда индекс является относительно небольшим.
В устройстве управления для транспортного средства, когда транспортное средство поворачивает, варьирование требуемой частоты вращения или требуемого передаточного отношения подавляется по сравнению со случаем, в котором транспортное средство не поворачивает.
Второй аспект изобретения относится к способу управления для транспортного средства. При этом способе управления, частота вращения источника мощности приведения в движение или передаточное отношение трансмиссии, соединенной с выходной стороной источника мощности приведения в движение, управляется в транспортном средстве, оснащенном источником мощности приведения в движение и трансмиссией. Способ управления включает определение индекса, который основан на состоянии движения транспортного средства, и управление требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса.
В соответствии с изобретением, быстрота изменения характеристик транспортного средства, которая соответствует намерению водителя, определяется на основе индекса, и требуемая частота вращения источника мощности приведения в движение или требуемое передаточное отношение для трансмиссии управляется на основе индекса. Динамические рабочие характеристики или характеристики вождения, адаптированные к намерению водителя, могут задаваться.
Дополнительно, в соответствии с изобретением, поскольку величина потребности приведения в движение, представленная посредством операции педали акселератора, выполняемой водителем, также отражается, в дополнение к индексу, который соответствует намерению водителя, в частоте вращения источника питания или передаточном отношении трансмиссии, транспортное средство может двигаться в ответ на потребность приведения в движение водителя. Кроме того, когда индекс является большим, потребность приведения в движение водителя быстро удовлетворяется. В этом отношении также можно не допускать получение ощущения дискомфорта водителем.
Краткое описание чертежей
Вышеописанные и дополнительные признаки и преимущества изобретения должны становиться очевидными из последующего описания предпочтительных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов, и на которых:
Фиг. 1 является чертежом, на котором определенные значения продольного ускорения и поперечного ускорения проиллюстрированы на круге трения шины;
Фиг. 2 показывает пример варьирований задающего SPI на основе мгновенного SPI;
Фиг. 3 иллюстрирует то, как разность между мгновенным SPI и задающим SPI интегрируется по времени, и то, как значение интеграла сбрасывается;
Фиг. 4 является картой, иллюстрирующей взаимосвязь между задающим SPI и требуемой максимальной величиной ускорения;
Фиг. 5 получается посредством добавления требуемого ускорения на основе задающего SPI к чертежу, иллюстрирующему взаимосвязь между скоростью транспортного средства и ускорением для каждой требуемой частоты вращения. Также показана процедура для определения конечной указываемой частоты вращения на основе чертежа;
Фиг. 6 получается посредством добавления требуемого ускорения на основе задающего SPI к чертежу, иллюстрирующему взаимосвязь между скоростью транспортного средства и ускорением для каждой ступени переключения передач. Также показана процедура для определения конечной указываемой ступени переключения передач на основе чертежа;
Фиг. 7 является схемой, полученной посредством добавления линии, на которой требуемое максимальное ускорение имеет постоянное значение на основе задающего SPI, к схеме, представляющей ускорение для каждой скорости транспортного средства и каждой ступени переключения передач;
Фиг. 8 является схемой, иллюстрирующей пример карты ускорения, которая может быть использована при управлении, в котором требуемое максимальное ускорение поддерживается постоянным при высоком задающем SPI и задано равным значению, соответствующему требуемой максимальной величине ускорения при низком задающем SPI;
Фиг. 9 является схемой, иллюстрирующей пример карты ускорения, которая может быть использована, когда ступень переключения передач задается посредством транспортного средства и задающего SPI;
Фиг. 10 является схемой, иллюстрирующей пример карты, которая может быть использована для того, чтобы определять указываемую частоту вращения, когда транспортное средство, оснащенное бесступенчатой трансмиссией, является объектом управления;
Фиг. 11 является временной диаграммой, иллюстрирующей, относительно случая высокого задающего SPI и случая низкого задающего SPI, режим изменения целевой частоты вращения, когда существует потребность в ускорении от водителя;
Фиг. 12 является блок-схемой управления, в котором скорректированная ступень переключения передач и скорректированная мощность приведения в движение, определенные на основе задающего SPI для транспортного средства, оснащенного многоступенчатой автоматической трансмиссией, отражаются при управлении переключением передач и управлении выходной мощностью двигателя;
Фиг. 13 является блок-схемой другого управления, в котором скорректированная ступень переключения передач и скорректированная мощность приведения в движение, определенные на основе задающего SPI для транспортного средства, оснащенного многоступенчатой автоматической трансмиссией, отражаются при управлении переключением передач и управлении выходной мощностью двигателя;
Фиг. 14 является блок-схемой еще одного другого управления, в котором скорректированная ступень переключения передач и скорректированная мощность приведения в движение, определенные на основе задающего SPI для транспортного средства, оснащенного многоступенчатой автоматической трансмиссией, отражаются при управлении переключением передач и управлении выходной мощностью двигателя; и
Фиг. 15 схематично показывает транспортное средство, которое может быть объектом управления в соответствии с изобретением.
Подробное описание вариантов осуществления изобретения
Изобретение будет подробнее описано далее. Транспортное средство, которое является объектом управления в соответствии с изобретением, принудительно ускоряется, замедляется или поворачивает посредством операций водителя, и автомобиль, имеющий двигатель внутреннего сгорания или электромотор в качестве источника мощности приведения в движение, является характерным примером такого транспортного средства. Его пример этого показывается в блок-схеме на фиг. 15. Транспортное средство 1, показанное в данном документе, имеет всего четыре колеса: два передних колеса 2, которые являются ведущими колесами, и два задних колеса 3, которые являются ведомыми колесами, и эти четыре колеса 2 и 3 монтируются на кузове транспортного средства (не показан на чертеже) посредством соответствующих подвесок 4. Аналогично широко распространенной подвеске, подвеска 4 состоит, главным образом, из пружины и амортизатора (демпфера). На фиг. 15, показаны амортизаторы 5 подвески. Амортизаторы 5, показанные в данном документе, выполнены с возможностью формировать буферное действие посредством использования гидравлического сопротивления текучей среды, например, газа или жидкости, а также выполнены так, что значение гидравлического сопротивления может быть изменено посредством актуатора, например, электромотора 6. Таким образом, когда гидравлическое сопротивление увеличивается, кузов транспортного средства не опускается легко, создается так называемое ощущение жесткости, уменьшается ощущение комфорта, и спортивное ощущение повышается в качестве характеристик движения транспортного средства. Также может быть использована конфигурация, в которой высота транспортного средства регулируется посредством подачи сжатого газа в амортизаторы 5 или выпуска газа из них.
Каждое из передних и задних колес 2 и 3 содержит тормозное устройство (не показано на чертеже), выполненное с возможностью применять тормозную силу к передним и задним колесам 2 и 3, когда водитель управляет тормозным устройством посредством нажатия педали 7 тормоза, расположенной в сиденье водителя.
Источник мощности приведения в движение транспортного средства 1 имеет традиционную конфигурацию, такую как двигатель внутреннего сгорания, электромотор или комбинация вышеозначенного. Фиг. 15 показывает пример, в котором двигатель внутреннего сгорания (двигатель) 8 устанавливается. Дроссельный клапан 10 для управления объемом всасываемого воздуха располагается во впускной патрубке 9 двигателя 8. Дроссельный клапан 10 имеет конфигурацию, называемую электронным дроссельным клапаном. Такой клапан открывается и закрывается посредством актуатора с электронным управлением 11, например, электромотора, и степень открытия клапана может регулироваться. Актуатор 11 выполнен так, что дроссельный клапан 10 регулируется до предварительно определенной степени открытия (степени открытия дросселя) согласно величине выжимания, т.е. величине нажатия педали акселератора, для педали акселератора 12, расположенной у сиденья водителя.
Взаимосвязь между величиной нажатия педали акселератора и степенью открытия дросселя может задаваться надлежащим образом, и по мере того, как эта взаимосвязь становится близкой к взаимно-однозначной взаимосвязи, так называемое прямое ощущение повышается, и характеристика поведения транспортного средства имеет спортивное ощущение. Наоборот, когда характеристики задаются так, что степень открытия дросселя становится небольшой относительно величины нажатия педали акселератора, характеристика поведения транспортного средства или характеристика ускорения имеет так называемое ощущение умеренности. Когда электромотор используется в качестве источника мощности приведения в движение, электронный регулятор, например, инвертор или преобразователь предоставляется вместо дроссельного клапана 10, электрический ток электрического контроллера регулируется согласно величине нажатия педали акселератора, и взаимосвязь между величиной электрического тока и величиной нажатия педали акселератора, т.е. характеристика поведения или характеристика ускорения, изменяется надлежащим образом. Примером случая, в котором "взаимосвязь становится близкой к взаимно-однозначной взаимосвязи", как упомянуто выше, является случай, когда направление и величина скорости варьирования величины нажатия педали акселератора практически равны направлению и величине скорости варьирования степени открытия дросселя.
Трансмиссия 13 соединяется с выходной стороной двигателя 8. Трансмиссия 13 выполнена с возможностью надлежащим образом изменять соотношение входной частоты вращения и выходной частоты вращения, т.е. передаточное отношение, и является, например, традиционной трансмиссией, такой как многоступенчатая автоматическая трансмиссия, ременная бесступенчатая трансмиссия или тороидальная бесступенчатая трансмиссия. Соответственно, трансмиссия 13 содержит актуатор (не показан на чертеже) и выполнена так, что передаточное отношение варьируется ступенчато (пошагово) или непрерывно посредством надлежащего управления актуатором. Более конкретно, карта переключения передач, на которой передаточное отношение определяется согласно состоянию транспортного средства, например, скорости транспортного средства или величине нажатия педали акселератора, подготавливается заранее, и управление переключением передач выполняется согласно карте варьирования скорости, или целевая выходная мощность вычисляется на основе состояния транспортного средства, например, скорости транспортного средства или величины нажатия педали акселератора, целевая частота вращения двигателя определяется из целевой выходной мощности и линии оптимального расхода топлива, и управление переключением передач выполняется для того, чтобы получать целевую частоту вращения двигателя.
Режим управления, нацеленный на повышение эффективности использования топлива, или режим управления, нацеленный на увеличение мощности приведения в движение, может выбираться для вышеописанного управления базовым переключением передач. В режиме управления, нацеленном на повышение эффективности использования топлива, переключение коробки передач на более высокую передачу выполняется на низкой скорости транспортного средства, или передаточное отношение на стороне высокой скорости используется на стороне низкой скорости транспортного средства, тогда как при управлении, нацеленном на увеличение мощности приведения в движение или улучшение характеристики ускорения, переключение коробки передач на более высокую передачу выполняется на высокой скорости транспортного средства, или передаточное отношение на стороне низкой скорости используется на стороне высокой скорости транспортного средства. Такое управление может выполняться посредством переключения карты переключения передач, коррекции величины потребности приведения в движение или коррекции вычисленного передаточного отношения. При необходимости трансмиссионный механизм, например, преобразователь крутящего момента, оснащенный блокировочной муфтой, может предоставляться между двигателем 8 и трансмиссией 13. Выходной вал трансмиссии 13 соединяется с задними колесами 3 через дифференциал 14, который является конечным редуктором. Выражения "низкая скорость транспортного средства (низкая скорость)" и "высокая скорость транспортного средства (высокая скорость)", используемые в данном документе, относятся к случаям, в которых скорость транспортного средства выше и ниже предварительно определенной скорости транспортного средства, соответственно.
Механизм 15 рулевого управления, который управляет передними колесами 2, поясняется ниже. Механизм рулевого управления содержит рулевой привод 17, который передает вращательное действие руля 16 на левые передние колеса и правые передние колеса 2, и усиливающий механизм 18, который усиливает угол поворота колес или силу поворота колес руля 16. Усиливающий механизм 18 содержит актуатор (не показан на чертеже) и выполнен так, что величина усиления, предоставляемая актуатором, может регулироваться.
Антиблокировочная тормозная система (ABS), система управления тягой и система управления стабильностью транспортного средства (VSC), которая осуществляет унифицированное управление этими системами, предоставляются, чтобы стабилизировать поведение или положение транспортного средства 1 (эти системы не показаны на чертежах). Эти системы являются общедоступными и выполнены так, что тормозная сила, применяемая к колесам 2 и 3, уменьшается, или тормозная сила применяется на основе разности между скоростью транспортного средства и скоростью вращения колес, и крутящий момент двигателя управляется помимо нее, тем самым предотвращая либо не допуская блокировки или проскальзывания колес 2 и 3 и стабилизируя поведение транспортного средства. Навигационная система, которая может получать данные, касающиеся дороги или запланированного маршрута, или переключатель для выбора вручную спортивного режима, нормального режима и режима с низким расходом топлива (экономичного режима), также может предоставляться, и механизм привода на четыре колеса (4WD), допускающий изменение характеристик поведения, например, рабочих характеристик вождения на подъемах, рабочих характеристик ускорения или характера рулевого управления, также может предоставляться.
Множество датчиков предоставляется, чтобы получать данные для управления вышеописанным двигателем 8, трансмиссией 13, амортизаторами 5 подвесок 4, усиливающим механизмом 18 и вышеописанными системами, которые не показаны на чертеже. Примеры таких датчиков включают в себя датчик 19 скорости вращения колес, который определяет скорость вращения передних и задних колес 2 и 3, датчик 20 величины нажатия педали акселератора, датчик 21 степени открытия дросселя, датчик 22 частоты вращения двигателя, датчик 23 выходной частоты вращения, который определяет выходную частоту вращения трансмиссии 13, датчик 24 угла поворота колес, датчик 25 продольного акселератора, который определяет продольное ускорение (Gx), датчик 26 поперечного ускорения, который определяет ускорение (поперечное ускорение Gy) в поперечном направлении (направлении слева направо), и датчик 27 скорости рыскания. Датчики 25 и 26 ускорения могут быть использованы вместе с датчиками ускорения, которые используются при управлении поведением транспортного средства, например, антиблокировочной тормозной системой (ABS) и системой управления стабильностью транспортного средства (VSC) или могут быть использованы вместе с датчиком ускорения, предоставленным для управления срабатыванием подушки безопасности в транспортном средстве, оснащенном подушкой безопасности. Дополнительно, продольные и поперечные ускорения Gx и Gy могут быть получены посредством разложения значения определения, определенного посредством одного датчика ускорения, расположенного под предварительно определенным углом (например, 45°) относительно продольного направления транспортного средства на горизонтальной плоскости, на продольное ускорение и поперечное ускорение. Продольное и поперечное ускорения Gx и Gy также могут быть найдены посредством вычислений на основе величины нажатия педали акселератора, скорости транспортного средства, нагрузки при движении и угла поворота колес, а не посредством определения с помощью датчика. Эти датчики 19-27 выполнены с возможностью передавать сигналы определения (данные) в электронный модуль 28 управления (ЭМУ), и ЭМУ 28 выполнен с возможностью осуществлять вычисления согласно этим данным, а также данным и программам, которые заранее сохранены, и выводить результаты вычисления в качестве сигналов команд управления в вышеописанные системы или их актуаторы. Составное ускорение не ограничивается ускорением, включающим в себя компоненты ускорения во множестве направлений, например, ускорением, включающим в себя компонент ускорения в продольном направлении транспортного средства и компонент ускорения в направлении ширины (поперечном направлении) транспортного средства. Ускорение только в одном направлении может использоваться в качестве составного ускорения. Например, только ускорение в продольном направлении транспортного средства может использоваться в качестве составного ускорения.
Устройство управления в соответствии с изобретением выполнено с возможностью отражать состояние движения и быстроту и резкость поведения транспортного средства (они иногда описываются ниже вместе как состояние движения) при управлении поведением транспортного средства, в частности, в динамических рабочих характеристиках или характеристике ускорения. Состояние движения транспортного средства, как упомянуто в данном документе, является состоянием, представленным посредством продольного ускорения, поперечного ускорения, ускорения рыскания или крена или ускорения, полученного посредством комбинирования этих ускорений во множестве направлений. Таким образом, с учетом того, что обычно возникают ускорения во множестве направлений, когда поведение транспортного средства возвращается в исходное состояние под влиянием окружения движения, например, дорожного покрытия, или когда транспортное средство управляется на заданной скорости или управляется в целевом направлении, состояние движения транспортного средства должно очевидно отражать до определенной степени окружение движения или намерение водителя. С учетом вышеприведенного, в соответствии с изобретением, состояние движения транспортного средства отражается при управлении поведением транспортного средства, в частности, в динамических рабочих характеристиках или характеристике ускорения.
Как описано выше, поведение транспортного средства включает в себя рабочие характеристики ускорения, характер руления (поворачиваемость), жесткость поддержки с помощью подвески 4 (т.е. степень подпрыгивания на неровностях и ее легкость) и степень крена или "галопирования", и устройство управления в соответствии с изобретением изменяет эти характеристики поведения на основе вышеописанного состояния движения. В этом случае, характеристики движения могут быть изменены посредством использования ускорения в определенном направлении или составном ускорении как есть, в качестве одного примера вышеописанного состояния движения. Тем не менее, чтобы уменьшать ощущение дискомфорта, может быть использован индекс, полученный посредством коррекции вышеуказанного ускорения или составного ускорения.
Спортивность поясняется ниже в качестве примера такого индекса. Индекс SPI спортивности является индексом, указывающим намерение водителя или состояние движения транспортного средства. Спортивность, которая может быть использована в соответствии с изобретением, является индексом, полученным посредством комбинирования ускорений (в частности, их абсолютных значений) во множестве направлений, и ускорение, полученное посредством сложения продольного ускорения Gx и поперечного ускорения Gy в качестве ускорений, непосредственно связанных с поведением относительно направления движения, является примером такого индекса. Например, индекс вычисляется посредством мгновенного SPI=(Gx2+Gy2)1/2. "Мгновенный SPI", как упомянуто в данном документе, является так называемым физическим параметром и означает индекс, который вычисляется на основе ускорений, обнаруженных в каждом направлении в каждый момент по мере того, как транспортное средство движется. Выражение "в каждый момент", как упомянуто в данном документе, означает каждое повторение, когда определение ускорения и вычисление мгновенного SPI на его основе многократно осуществляется с предварительно определенной продолжительностью цикла.
Из продольного ускорения Gx, используемого в вышеуказанном уравнении (1), по меньшей мере, одно из ускорения при увеличении скорости и ускорения при снижении скорости (т.е. замедления) может подвергаться операции нормализации или операции взвешивания. Таким образом, в типичном транспортном средстве, ускорение при снижении скорости выше ускорения при увеличении скорости, но разность на практике не ощущается и не распознается водителем, и в большинстве случаев ускорение при снижении скорости и ускорение при увеличении скорости распознаются как практически одинаковые. Операция нормализации служит для того, чтобы корректировать эту разность между фактическим значением и ощущением водителя, и включает увеличение ускорения при увеличении скорости или снижение ускорения при снижении скорости для продольного ускорения Gx. Более конкретно, в этой операции, соотношение максимальных значений соответствующих ускорений определяется, и ускорение при снижении скорости или при увеличении скорости умножается на него. Кроме того, операция взвешивания может выполняться для того, чтобы корректировать ускорение при уменьшении скорости относительно поперечного ускорения. По существу, эта операция выполняет коррекцию посредством назначения весового коэффициента для значения, по меньшей мере, в одном из прямого и обратного направления, так что максимальное ускорение в каждом направлении размещается на круге предварительно определенного радиуса, аналогично тому, когда продольная движущая сила и поперечная сила, которые могут быть сформированы посредством шин, представляются на круге трения шины. Следовательно, операция нормализации и операция взвешивания создают разность в степенях, в которых ускорение при увеличении скорости и ускорение при снижении скорости отражаются в характеристике поведения. Продольное ускорение при снижении скорости и продольное ускорение при увеличении скорости могут подвергаться операции взвешивания, в качестве одного примера операции взвешивания, так что степень влияния продольного ускорения при увеличении скорости превышает степень влияния продольного ускорения при снижении скорости.
Таким образом, в зависимости от направления ускорения, существует несоответствие между фактическим значением ускорения и ощущением водителя. Например, очевидно, что существует несоответствие между ускорением в направлении рыскания или направлении крена и продольным ускорением. Следовательно, в соответствии с изобретением, может быть использована такая конфигурация, в которой степени, посредством которых ускорения в различных направлениях отражаются в характеристике движения транспортного средства, варьируются, другими словами, степень варьирования характеристики движения на основе ускорения в любом из направлений задается отличающейся от степени варьирования характеристики движения на основе ускорения в другом направлении.
Фиг. 1 показывает пример, в котором значение датчика поперечного ускорения Gy и продольного ускорения Gx, подвергнутое вышеописанной операции нормализации и операции взвешивания, проиллюстрировано на круге трения шины. Этот пример относится к случаю, в котором транспортное средство управляется в тестовом курсе, моделирующем типичную дорогу. В качестве общей тенденции, поперечное ускорение Gy также, вероятно, становится большим, когда транспортное средство замедляется в значительной степени, и продольное ускорение Gx и поперечное ускорение Gy возникают вдоль круга трения шины.
В соответствии с изобретением, задающий SPI определяется из мгновенного SPI. Задающий SPI является индексом, используемым для управления, которое изменяет характеристику движения. Этот индекс увеличивается сразу с увеличением мгновенного SPI, который является основой для его вычисления, и снижается медленнее мгновенного SPI. В частности, задающий SPI выполнен с возможностью снижаться, когда предварительно определенное условие удовлетворяется. Фиг. 2 иллюстрирует варьирования задающего SPI, определенного на основе варьирований мгновенного SPI. В примере, показанном в данном документе, мгновенный SPI представляется посредством значений, проиллюстрированных на фиг. 1, описанном выше. В отличие от этого, задающий SPI выполнен с возможностью задания равным максимальному значению мгновенного SPI и поддержания предыдущего значения до тех пор, пока предварительно определенное условие не удовлетворяется. Таким образом, задающий SPI реализован как индекс, который изменяется быстро при увеличении и изменяется относительно медленно при снижении.
Более конкретно, во временной зоне T1 после того, как управление начато на фиг. 2, например, в случае если транспортное средство замедляется и поворачивает, мгновенный SPI, полученный на основе таких варьирований в ускорении, увеличивается/снижается, но мгновенный SPI, превышающий максимальное значение предыдущего цикла, возникает до того, как вышеуказанное предварительно определенное условие удовлетворяется, и, следовательно, задающий SPI увеличивается пошагово, и увеличенный задающий SPI поддерживается. В отличие от этого, в момент t2 времени или момент t3 времени, например, в случае если транспортное средство, которое повернуло и ускорилось, начинает двигаться прямо и ускоряться, задающий SPI снижается, поскольку условие для снижения удовлетворяется. Таким образом, условие для снижения задающего SPI удовлетворяется, когда считается, что состояние, в котором задающий SPI, поддерживаемый при предыдущем большом значении, не отражает намерение водителя, допускается. В изобретении условие удовлетворяется, когда временной интервал истекает.
Таким образом, считается, что состояние, в котором задающий SPI, поддерживаемый при предыдущем большом значении, не отражает намерение водителя, является состоянием, в котором разность между задающим SPI, который поддерживается, и мгновенным SPI, который возникает в этом процессе, является сравнительно большой, и разность постоянно является большой. Соответственно, задающий SPI не снижается вследствие мгновенного SPI, являющегося результатом, например, операции временного отпускания педали акселератора 12 водителем, например, когда транспортное средство управляется так, что оно поворачивает и ускоряется. Когда состояние, в котором мгновенный SPI, являющийся результатом, например, операции непрерывного отпускания педали акселератора 12 водителем, меньше поддерживаемого задающего SPI, продолжается в течение предварительно определенного временного интервала, например, когда транспортное средство постепенно замедляется, определяется то, что условие для снижения задающего SPI удовлетворяется. Время поддержания состояния, в котором мгновенный SPI меньше задающего SPI, может рассматриваться в качестве начального условия для снижения задающего SPI. Дополнительно, чтобы более точно отражать фактическое состояние движения в задающем SPI, начальное условие для снижения задающего SPI может рассматриваться в качестве момента времени, в который значение интеграла по времени (или накопленное значение) разности между поддерживаемым задающим SPI и мгновенным SPI достигает предварительно определенного порогового значения. Пороговое значение может задаваться надлежащим образом посредством проведения тестов или моделирования. Если значение интеграла по времени разности во втором подходе используется, задающий SPI снижается посредством принятия во внимание разности между задающим SPI и мгновенным SPI и времени. Следовательно, можно осуществлять управление изменением характеристики поведения, которое более точно отражает фактическое состояние движения или поведение.
В примере, показанном на фиг. 2, время поддержания задающего SPI до тех пор, пока вышеуказанный момент t2 времени не достигается, превышает время поддержания задающего SPI до тех пор, пока момент t3 времени не достигается, но это обусловлено конфигурацией, предоставляющей нижеописанное управление. Таким образом, в конце вышеуказанной временной зоны T1, задающий SPI увеличивается и поддерживается при предварительно определенном значении. Затем, мгновенный SPI увеличивается в момент t1 времени до того, как вышеуказанное условие начала снижения удовлетворяется, и разность между увеличенным мгновенным SPI и задающим SPI, который поддерживается, становится равной или меньшей предварительно определенного значения, которое задано заранее. Это предварительно определенное значение может быть надлежащим образом задано посредством проведения тестов или моделирования или с учетом ошибки в вычислении мгновенного SPI. Когда мгновенный SPI приближается к задающему SPI, который поддерживается, это означает то, что допускается состояние ускорения/замедления и/или состояние поворачивания или состояние, близкое к нему, при котором накладывается мгновенный SPI, выступающий в качестве основы для задающего SPI, который поддерживается. Таким образом, даже если определенный временной интервал истекает, поскольку задающий SPI увеличен до значения, при котором он поддерживается, состояние движения аппроксимирует допускаемое состояние движения до того, как этот временной интервал истек, и, следовательно, даже если допускается состояние, в котором мгновенный SPI меньше поддерживаемого задающего SPI, выполнение вышеуказанного условия начала снижения задерживается, и задающий SPI поддерживается при предыдущем значении. Управление или операция, ассоциированная с этой задержкой, могут осуществляться посредством сброса вышеописанного накопленного значения (кумулятивного значения) истекшего времени или значения интеграла разности и повторного начала накопления истекшего времени или интегрирования разности либо посредством уменьшения накопленного значения или значения интеграла посредством предварительно определенной величины и затем прерывания накопления или интегрирования в течение фиксированного времени.
Фиг. 3 является принципиальной схемой, иллюстрирующей интегрирование вышеуказанной разности и сброс интегрирования. Площадь поверхности заштрихованной части на фиг. 3 соответствует значению интеграла. В этом процессе значение интеграла сбрасывается в момент t11 времени, в который разность между мгновенным SPI и задающим SPI становится равной или меньшей предварительно определенного значения Ad, и интегрирование разности начинается снова. А именно, значение интеграла сбрасывается на основе того, равна или меньше разность между мгновенным SPI, полученным в это время, и задающим SPI, поддерживаемым при данном значении, порогового значения либо нет. Соответственно, начальное условие для снижения задающего SPI не удовлетворяется, и, поэтому, задающий SPI поддерживается при ранее полученном данном значении. Затем, если мгновенный SPI становится превышающим поддерживаемый задающий SPI после того, как интегрирование повторно начинается, задающий SPI обновляется до большого значения, соответствующего мгновенному SPI, и поддерживается при этом значении, и вышеописанное значение интеграла сбрасывается.
Когда условие для начала управления для снижения задающего SPI определяется на основе вышеописанного значения интеграла, степень или градиент снижения задающего SPI может изменяться согласно продолжительности, которая истекла до того, как это условие удовлетворяется. Поскольку вышеуказанное значение интеграла получается посредством интегрирования разности между поддерживаемым задающим SPI и мгновенным SPI по времени, когда разность является большой, значение интеграла достигает предварительно определенного значения, и условие удовлетворяется в рамках короткого временного интервала, но когда разность является небольшой, относительно большое время истекает до того, как значение интеграла достигнет предварительно определенного значения, и условие удовлетворяется. Соответственно, степень или градиент снижения задающего SPI может варьироваться, например, согласно продолжительности, которая истекла до тех пор, пока условие для начала управления для снижения задающего SPI, как описано выше, не удовлетворяется. Если условие удовлетворяется в коротком интервале, промежуток снижения мгновенного SPI относительно задающего SPI, который поддерживается, становится большим, и задающий SPI значительно отклоняется от намерения водителя в этот момент времени. Соответственно, в таком случае, задающий SPI уменьшается на высокой скорости или с высоким градиентом. Наоборот, если время, истекшее до того, как условие удовлетворяется, относительно большое, промежуток снижения мгновенного SPI относительно задающего SPI, который поддерживается, становится небольшим, и нельзя сказать, что поддерживаемый задающий SPI значительно отклоняется от намерения водителя в этот момент времени. Соответственно, в таком случае, задающий SPI медленно уменьшается на низкой скорости или с низким градиентом. За счет этого разность между задающим SPI для задания характеристики транспортного средства и намерением водителя может быть скорректирована быстро и точно, и характеристика поведения транспортного средства, приспособленная к состоянию движения, может задаваться.
Вышеописанный задающий SPI представляет состояние движения транспортного средства и включает в себя окружение движения, такое как градиент дороги или присутствие перекрестков и их кривизна, а также намерение при вождении водителя. Это обусловлено тем, что ускорение транспортного средства варьируется в зависимости от состояния пути движения, а также обусловлено тем, что транспортное средство ускоряется или замедляется водителем согласно состоянию пути движения, и ускорение дополнительно изменяется посредством этой операции ускорения/замедления. Устройство управления в соответствии с изобретением выполнено с возможностью использования задающего SPI при управлении характеристикой поведения транспортного средства. Характеристика движения в соответствии с изобретением включает в себя характеристику ускорения, характеристику поворачиваемости, характеристику подвески и т.п., и эти характеристики надлежащим образом задаются посредством варьирования вышеуказанной характеристики управления дроссельного клапана 10, характеристики переключения передач трансмиссии 13, характеристики демпфирования, предоставляемой посредством амортизатора 5 в подвеске 4, и характеристики усиления усиливающего механизма 18 посредством, соответственно, предоставляемых актуаторов. Что касается общей тенденции изменений в характеристике движения, когда задающий SPI увеличивается, характеристика изменяется так, что она предоставляет так называемый спортивный режим движения.
Пример, в котором динамические рабочие характеристики или характеристика ускорения изменяются согласно задающему SPI, поясняется ниже в качестве примера изменений в такой характеристике поведения. Требуемая максимальная величина ускорения определяется согласно задающему SPI, который задается вышеописанным способом. Пример такого определения показывается на фиг. 4. Требуемая максимальная величина ускорения, как упомянуто в данном документе, предусматривает добавочную мощность приведения в движение. Например, требуемая максимальная величина ускорения 100% представляет состояние, предоставляющее максимальное ускорение, которое может быть сформировано посредством транспортного средства, и передаточное отношение, которое обеспечивает максимальную частоту вращения двигателя, или наибольшее передаточное отношение (передаточное отношение на самой низкой скорости) задается для трансмиссии 13. Например, требуемая максимальная величина ускорения 50% представляет состояние, предоставляющее ускорение, которое составляет половину от максимального ускорения, которое может быть сформировано посредством транспортного средства, и промежуточное передаточное отношение задается для трансмиссии 13. В примере, показанном на фиг. 4, требуемая максимальная величина ускорения увеличивается с увеличением задающего SPI. Базовая характеристика, показанная посредством сплошной линии на фиг. 4, определяется посредством вычисления взаимосвязи между задающим SPI и требуемой максимальной величиной ускорения на основе данных, полученных при фактическом вождении транспортного средства, и базовая характеристика надлежащим образом корректируется посредством фактического вождения транспортного средства или проведения моделирования. Когда характеристическая линия задается для базовой характеристики на стороне, на которой требуемая максимальная величина ускорения увеличивается, ускорение транспортного средства становится относительно большим, и, следовательно, так называемая характеристика спортивного поведения или характеристика ускорения получается. Наоборот, когда характеристическая линия задается на стороне, на которой требуемая максимальная величина ускорения снижается, ускорение транспортного средства становится относительно небольшим, и, следовательно, так называемая характеристика комфортного поведения или характеристика ускорения получается. Эти виды регулирования (т.е. адаптация или настройка) могут надлежащим образом выполняться согласно сбытовым качествам, требуемым для транспортного средства. В базовой характеристике требуемая максимальная величина ускорения задается равной нулю в состоянии, в котором задающий SPI превышает нуль, чтобы обеспечивать то, что состояние, в котором транспортное средство управляется на очень низкой скорости, например, в зоне дорожной пробки или при парковке в гараже, не отражается при управлении, осуществляемом, чтобы задавать или изменять характеристику ускорения.
Управление, осуществляемое в случае, если вышеописанная требуемая максимальная величина ускорения отражается в характеристике переключения передач трансмиссии 13, и характеристика ускорения или динамическая характеристика изменяется, поясняется ниже. В транспортном средстве, оснащенном бесступенчатой трансмиссией в качестве трансмиссии 13, или в гибридном транспортном средстве, в котором частота вращения двигателя может управляться посредством электромотора, целевой вывод вычисляется на основе скорости транспортного средства или величины потребности приведения в движение, и управление осуществляется, чтобы получать частоту вращения двигателя, при которой достигается целевой вывод. Фиг. 5 показывает взаимосвязь между скоростью транспортного средства и ускорением для каждой требуемой частоты вращения. Требуемая максимальная величина ускорения, определенная из задающего SPI на основе вышеописанных данных, показанных на фиг. 4, добавляется к этой взаимосвязи. Например, сплошные жирные линии на фиг. 5 получаются посредством добавления требуемой максимальной величины ускорения в 100% и 50%. Следовательно, частота вращения, представленная посредством линии, проходящей через точку пересечения линии, указывающей требуемую максимальную величину ускорения, определенную из задающего SPI, и линии, указывающей скорость транспортного средства в текущий момент времени, является требуемой частотой вращения.
В транспортном средстве, оснащенном трансмиссией 13, например, поясненном выше со ссылкой на фиг. 15, карта базового переключения передач предоставляется, чтобы управлять передаточным отношением, которое должно задаваться посредством трансмиссии 13. Эта карта скорости транспортного средства используется, когда так называемый спортивный режим ни выбран, ни задан, и задает передаточное отношение согласно скорости транспортного средства и целевой частоте вращения двигателя для бесступенчатой трансмиссии. Управление потребностью в крутящем моменте является типичным примером такого управления передаточным отношением. Например, требуемая мощность приведения в движение находится из карты мощности приведения в движение на основе величины нажатия педали акселератора и скорости транспортного средства, выступающей в качестве величины потребности приведения в движение, и требуемая мощность двигателя определяется из требуемой мощности приведения в движение и скорости транспортного средства или частоты вращения двигателя. Целевая частота вращения двигателя, при которой требуемый вывод выводится с оптимальной эффективностью использования топлива, определяется на основе карты частоты вращения двигателя, и передаточное отношение бесступенчатой трансмиссии управляется так, что оно достигает целевой частоты вращения двигателя. Таким образом, трансмиссия 13 принудительно выступает в качестве механизма управления частотой вращения для двигателя, который является источником мощности приведения в движение. Поскольку выходная мощность двигателя может быть определена посредством произведения крутящего момента и частоты вращения, крутящий момент двигателя, при котором достигается требуемый вывод, определяется на основе вышеуказанной целевой частоты вращения двигателя или скорости транспортного средства, соответствующей ему, и степень открытия дросселя вычисляется, чтобы получать такой крутящий момент двигателя.
Средство B31 указания частоты вращения в спортивном режиме, показанное на фиг. 5, является средством для указания целевой частоты вращения, определенной на основе вышеописанного задающего SPI, и соответствует так называемому средству вычисления частоты вращения в спортивном режиме. Средство B32 указания частоты вращения в нормальном режиме является средством для указания требуемой частоты вращения, определенной посредством управления частотой вращения двигателя в обычном режиме, например, управления потребностью в крутящем моменте, и соответствует так называемому средству вычисления частоты вращения в нормальном режиме. Так называемая частота вращения в нормальном режиме и так называемая частота вращения в спортивном режиме сравниваются (регулируются) посредством средства B33 осуществления регулирования частоты вращения, и большая частота вращения выбирается. Так называемый выбор максимума выполняется. Частота вращения, которая выбрана таким образом, выводится в качестве управляющего сигнала посредством средства B34 указания конечной частоты вращения. Следовательно, поскольку величина потребности приведения в движение, например, величина нажатия педали акселератора и т.п. является небольшой, когда частота вращения в нормальном режиме ниже частоты вращения в спортивном режиме, частота вращения в спортивном режиме поддерживается. Следует отметить, что, когда запрашиваемая величина движущей силы превышает значение, соответствующее требуемому максимальному ускорению, например, когда педаль акселератора нажимается в значительной степени, осуществляется переключение коробки передач на более низкую передачу.
Такое управление является управлением переключением передач, нацеленным на передаточное отношение на стороне низкой скорости транспортного средства (большое значение передаточного отношения) в бесступенчатой трансмиссии. Как результат, мощность приведения в движение или тормозная сила двигателя увеличивается посредством увеличения передаточного отношения, поведение транспортного средства становится быстрым и резким, и получается характеристика с так называемым спортивным ощущением или характеристика, адаптированная к намерению водителя или окружению движения, например, состоянию пути движения. Такое управление, касающееся транспортного средства, оснащенного бесступенчатой трансмиссией, может выполняться, когда переключатель выбора режима устанавливается, и так называемый спортивный режим выбирается посредством переключателя, и управление может быть запрещено, когда спортивный режим не выбирается.
В отличие от этого, когда трансмиссия 13 является многоступенчатой трансмиссией, управление осуществляется, как показано на фиг. 6. Когда многоступенчатая трансмиссия подвергается управлению переключением передач, целевая ступень переключения передач устанавливается, и сигнал команды управления выводится в актуатор трансмиссии 13, чтобы задавать эту ступень переключения передач. Следовательно, взаимосвязь между скоростью транспортного средства и ускорением для каждой ступени переключения передач является такой, как показано на фиг. 6. Сплошная жирная линия, показанная на фиг. 6, получается посредством сложения линий требуемого максимального ускорения 100% и 50% в качестве требуемой максимальной величины ускорения, определенной из задающего SPI, к этой взаимосвязи. Следовательно, ступень переключения передач, представленная посредством линии ступени переключения передач, которая является ближайшей к точке пересечения линии, указывающей требуемое максимальное ускорение, определенное из задающего SPI, и линии, указывающей скорость транспортного средства в текущий момент времени, является требуемой ступенью переключения передач (требуемым передаточным отношением).
Когда управление с помощью устройства управления в соответствии с изобретением выполняется, целевая ступень переключения передач в спортивном режиме, определенная в вышеописанном фиг. 6, и целевая ступень переключения передач в нормальном режиме (например, передаточное отношение, определенное на основе операции ускорения и скорости транспортного средства) на основе схемы переключения передач, которая подготовлена заранее, сравниваются (осуществление регулирования ступени коробки переключения передач), и ступень переключения передач на стороне низкой скорости транспортного средства с высоким передаточным отношением выбирается. Это так называемый выбор минимума. Таким образом, целевая ступень переключения передач в нормальном режиме многоступенчатой трансмиссии задается на основе схемы переключения передач (карты переключения передач), которая устанавливает область каждой ступени переключения передач посредством скорости транспортного средства и величины потребности приведения в движение, к примеру, величины нажатия педали акселератора, и, следовательно, когда величина потребности приведения в движение превышает значение, соответствующее требуемому максимальному ускорению, например, когда педаль акселератора нажимается в значительной степени, переключение коробки передач на более низкую передачу выполняется, а когда скорость транспортного средства дополнительно увеличивается, переключение коробки передач на более высокую передачу может выполняться.
Средство B41 указания ступени коробки переключения передач в спортивном режиме, показанное на фиг. 6, является средством для указания ступени коробки переключения передач, определенной на основе вышеописанного задающего SPI, и средство B42 указания ступени коробки переключения передач в нормальном режиме является средством для указания ступени коробки переключения передач, определенной на основе схемы переключения передач в обычном режиме, на основе операции ускорения и скорости транспортного средства. Так называемые ступень коробки переключения передач в спортивном режиме и ступень коробки переключения передач в нормальном режиме сравниваются (регулируются) посредством средства B43 осуществления регулирования ступени коробки переключения передач, и ступень коробки переключения передач на более низкой стороне скорости (ступень коробки переключения передач с более высоким передаточным отношением) выбирается. Так называемый выбор минимума выполняется. Ступень коробки переключения передач, которая выбрана таким образом, выводится в качестве управляющего сигнала посредством средства B44 указания конечной ступени коробки переключения передач. Таким образом, трансмиссия 13 принудительно выступает в качестве механизма управления частотой вращения для двигателя, который является источником мощности приведения в движение. Следовательно, поскольку величина потребности приведения в движение, например, величина нажатия педали акселератора является небольшой, когда ступень коробки переключения передач в нормальном режиме находится на стороне скорости транспортного средства, выше стороны скорости ступени коробки переключения передач в спортивном режиме, ступень коробки переключения передач в спортивном режиме поддерживается, и ступень коробки переключения передач на стороне более низкой скорости транспортного средства (высокое передаточное отношение) задается.
Такое управление является управлением переключением передач, нацеленным на ступень коробки переключения передач на стороне низкой скорости транспортного средства (большое значение передаточного отношения) в многоступенчатой трансмиссии. Как результат, мощность приведения в движение или тормозная сила двигателя увеличивается посредством увеличения передаточного отношения, поведение транспортного средства становится быстрым и резким, и получается характеристика с так называемым спортивным ощущением или характеристика, адаптированная к намерению водителя или окружению движения, например, состоянию пути движения. Такое управление, касающееся транспортного средства, оснащенного многоступенчатой трансмиссией, может выполняться, когда переключатель выбора режима устанавливается, и так называемый спортивный режим выбирается посредством переключателя, и управление может быть запрещено, когда спортивный режим не выбирается.
Функции средств, показанных на фиг. 5, или функции средств, показанных на фиг. 6, могут быть включены в ЭМУ 28, или электронное устройство управления для управления в спортивном режиме может предоставляться, и функции могут быть включены в электронное устройство управления для управления в спортивном режиме.
В примерах, показанных на фиг. 5 и 6 выше, задающий SPI, указывающий спортивность, определяется на основе ускорения, требуемое ускорение вычисляется на основе задающего SPI и скорости транспортного средства, и частота вращения двигателя или передаточное отношение (ступень коробки переключения передач) управляется, чтобы достигать требуемого ускорения. Следовательно, требуемая частота вращения двигателя или требуемое передаточное отношение для каждой скорости транспортного средства в конечном счете определяются на основе спортивности. Дополнительно, требуемое ускорение, определенное на основе задающего SPI, может поддерживаться, т.е. требуемая частота вращения двигателя или требуемое передаточное отношение может поддерживаться.
Пример такой конфигурации поясняется ниже со ссылкой на фиг. 7. В примере, показанном в данном документе, требуемое максимальное ускорение, определенное на основе задающего SPI, составляет 50%. Если задающий SPI и требуемая максимальная величина ускорения на его основе определяются посредством переключения на спортивный режим, когда транспортное средство движется с предварительно определенной скоростью (например, 50 км/ч), ускорение согласно требуемой максимальной величине ускорения, соответствующей максимальному сформированному ускорению в этот момент времени (например, максимальное ускорение, которое может быть сформировано на ступени самой низкой скорости, которая может задаваться в этот момент времени, например, на ступени первой скорости), определяется в качестве требуемого максимального ускорения. Эта требуемая максимальная величина ускорения поддерживается, даже если скорость транспортного средства изменяется, и требуемая частота вращения двигателя или требуемое передаточное отношение управляется так, чтобы достигать этой требуемой максимальной величины ускорения независимо от значения скорости транспортного средства. На фиг. 7, линия, показывающая требуемую максимальную величину ускорения, проиллюстрирована в диапазоне высокой скорости транспортного средства, чтобы превышать максимальное ускорение, которое может быть сформировано на этой скорости транспортного средства, но на такой высокой скорости транспортного средства требуемая максимальная величина ускорения не может достигаться, ступень самой низкой скорости на соответствующей скорости транспортного средства задается, и максимальное ускорение, возможное на ступени самой низкой скорости, достигается. Если управление выполняется так, как показано на фиг. 7, избыточные динамические рабочие характеристики или характеристика избыточного ускорения могут быть получены в соответствии с намерением водителя, независимо от скорости транспортного средства. В примере, показанном на фиг. 7, транспортное средство, оснащенное многоступенчатой трансмиссией, рассматривается в качестве объекта управления, но аналогичное управление также может выполняться относительно транспортного средства, оснащенного бесступенчатой трансмиссией.
В примерах, показанных на фиг. 5 и 6 описанных выше, требуемое максимальное ускорение, определенное на основе задающего SPI, или требуемая частота вращения или требуемое передаточное отношение, при котором требуемое максимальное ускорение достигается, изменяется согласно скорости транспортного средства, тогда как в примере, показанном на фиг. 7, требуемое максимальное ускорение либо требуемая частота вращения или требуемое передаточное отношение, при котором требуемое максимальное ускорение достигается, поддерживается при начальном значении, даже если скорость транспортного средства изменяется. Поскольку эти типы управления имеют различные технические преимущества, любое управление может выполняться согласно значению задающего SPI, чтобы реализовывать соответствующее преимущество согласно состоянию движения транспортного средства.
Пример такого управления показывается на фиг. 8 относительно случая, в котором транспортное средство, оснащенное бесступенчатой трансмиссией, является объектом управления. Фиг. 8 показывает карту для задания требуемой максимальной величины ускорения на основе задающего SPI и скорости транспортного средства. Тонкие кривые линии на чертеже указывают передаточное отношение, а жирные кривые линии указывают требуемую максимальную величину ускорения для каждого задающего SPI. Таким образом, линия, указывающая требуемую максимальную величину ускорения, поднимается с увеличением значения задающего SPI, т.е. увеличением спортивности. Линия, указывающая требуемую максимальную величину ускорения, соответствующую промежуточному задающему SPI, может быть определена посредством интерполяции на основе указанного значения при низком задающем SPI и указанного значения при высоком задающем SPI. Следовательно, линии требуемых максимальных величин ускорения, показанные посредством символов L1 и L2 на фиг. 8, выбираются, когда задающий SPI относительно большой. С таким признаком, требуемая максимальная величина ускорения поддерживается при постоянном значении до тех пор, пока максимальное сформированное ускорение, соответствующее скорости транспортного средства, не достигается.
Когда требуемая максимальная величина ускорения управляется либо требуемая частота вращения двигателя или требуемое передаточное отношение управляется, чтобы достигать требуемой максимальной величины ускорения, как показано на фиг. 8, если значение задающего SPI снижается посредством низкой спортивности, требуемое ускорение задается равным ускорению в предварительно определенном соотношении с максимальным сформированным ускорением на каждой скорости транспортного средства. Как результат, избыточные динамические рабочие характеристики или характеристика избыточного ускорения, адаптированные к намерению водителя, могут быть реализованы, и одновременно можно не допускать достижения частотой вращения двигателя верхнего предела на низкой скорости транспортного средства, и можно не допускать становления чрезвычайно высоким ускорения. Дополнительно, когда значение задающего SPI является высоким, поскольку требуемая максимальная величина ускорения, которая ранее задана, поддерживается, независимо от скорости транспортного средства, высокие избыточные динамические рабочие характеристики или высокая характеристика избыточного ускорения задаются, и с этой точки зрения также могут быть получены рабочие характеристики, адаптированные к намерению водителя.
Вышеуказанный задающий SPI отражает операцию ускорения, операцию торможения или операцию рулевого управления, выполняемую водителем, и также отражает дорожные условия, такие как перекрестки или дороги с подъемами и спусками. Соответственно, операция большего ускорения-замедления формирует большее значение задающего SPI, и, следовательно, задающий SPI может заменяться потребностью в ускорении от водителя или величиной потребности приведения в движение. В соответствии с изобретением, такие технологические признаки задающего SPI могут быть использованы для того, чтобы выбирать ступень переключения передач (передаточное отношение) на основе задающего SPI.
Фиг. 9 показывает пример карты переключения передач, используемой в такой конфигурации, в которой ступень переключения передач задается на основе спортивности в транспортном средстве, оснащенном многоступенчатой автоматической трансмиссией. На чертеже скорость транспортного средства проиллюстрирована на абсциссе, и задающий SPI проиллюстрирован на ординате. На этой карте переключения передач, линия переключения коробки передач на более высокую передачу (сплошная линия на фиг. 9) и линия переключения коробки передач на более низкую передачу (пунктирная линия на фиг. 9) задаются посредством скорости транспортного средства и задающего SPI. Следовательно, когда управление переключением передач на основе фиг. 9 выполняется, если транспортное средство переключается на более высокую передачу, или задающий SPI снижается, и состояние движения, заданное посредством этой скорости транспортного средства и задающего SPI, варьируется и превышает линию переключения коробки передач на более высокую передачу, переключение коробки передач на более высокую передачу, заданное посредством линии переключения коробки передач на более высокую передачу, выполняется. В отличие от этого, если скорость транспортного средства снижается, или задающий SPI увеличивается, приводя к тому, что состояние движения, заданное посредством этой скорости транспортного средства и задающего SPI, варьируется и превышает линию переключения коробки передач на более низкую передачу, переключение коробки передач на более низкую передачу, заданное посредством линии переключения коробки передач на более низкую передачу, выполняется. Задающий SPI, как упомянуто выше, отражает ускорение, которое возникает согласно операции, выполняемой посредством привода, и также отражает состояние движения транспортного средства. Следовательно, когда управление переключением передач осуществляется согласно карте, показанной на фиг. 9, может выполняться управление переключением передач, которое отражает намерение водителя, а не потребность приведения в движение водителя в течение каждого момента.
Когда частота вращения двигателя увеличивается, или ступень коробки переключения передач изменяется на ступень коробки переключения передач на стороне низкой скорости посредством так называемого осуществления регулирования согласно увеличению величины потребности приведения в движение, предпочтительно, чтобы частота вращения двигателя или ступень коробки переключения передач на стороне низкой скорости задавалась следующим образом. Таким образом, поскольку требуемое ускорение может быть определено на основе величины потребности приведения в движение, например, величины нажатия педали акселератора или скорости транспортного средства, когда требуемое ускорение, определенное на основе величины потребности приведения в движение, превышает ускорение, определенное из скорости транспортного средства, и требуемая максимальная величина ускорения, определенная на основе вышеуказанного задающего SPI, частота вращения двигателя или ступень коробки переключения передач могут задаваться, например, так что они формируют требуемое ускорение, определенное на основе величины потребности приведения в движение, например, величины нажатия педали акселератора. Альтернативно, поскольку максимальное сформированное ускорение, которое может выводиться в момент времени, в который величина потребности приведения в движение увеличена, является значением, определенным посредством скорости транспортного средства и передаточного отношения, частота вращения двигателя или ступень коробки переключения передач могут задаваться, например, так что они формируют ускорение, полученное посредством пропорционального распределения разности между максимальным сформированным ускорением и ускорением, определенным на основе задающего SPI, например, обнаруженного из фиг. 5 или 6, посредством отношения величины потребности приведения в движение, к примеру, величины нажатия педали акселератора к ее максимальному значению. Таким образом, интерполяция между максимальным сформированным ускорением и ускорением, определенным на основе задающего SPI, например, обнаруженного из фиг. 5 или 6, может выполняться согласно величине потребности приведения в движение.
Таким образом, при переключении ускорения на основе задающего SPI на ускорение на основе величины потребности приведения в движение, предпочтительно, чтобы чувствительность к управлению этого переключения увеличивалась с увеличением задающего SPI. Другими словами, если задающий SPI уже увеличен, водитель очевидно хочет более спортивный режим движения или более быстрый и резкий режим движения, и величина потребности приведения в движение дополнительно увеличивается в этом состоянии. Следовательно, предпочтительно, чтобы частота вращения, выбранная посредством вышеуказанного выбора максимума, или ступень коробки переключения передач, выбранная посредством выбора минимума, быстро достигалась, и характеристика избыточного ускорения транспортного средства увеличивалась. Наоборот, если задающий SPI является сравнительно небольшим, так называемый умеренный режим движения очевидно запрашивается. Следовательно, требуемая частота вращения, выбранная посредством вышеуказанного выбора максимума, или ступень коробки переключения передач, выбранная посредством выбора минимума, может постепенно достигаться. В таком случае, ускорение варьируется плавно, отклонение от требуемой ускоряющей способности является небольшим, и ощущение дискомфорта может быть уменьшено.
Пример, в котором такое управление, отражающее операцию ускорения водителя, выполняется относительно транспортного средства, оснащенного бесступенчатой трансмиссией, поясняется ниже. Фиг. 10 показывает схему, полученную посредством сложения указываемой частоты вращения Nespi, соответствующей требуемому максимальному ускорению, и частоты вращения Nemax, соответствующей максимальному сформированному ускорению, в случае если предварительно определенный SPI задан на схеме, на которой ускорение, соответствующее скорости транспортного средства, показывается для каждого передаточного отношения. Когда требуемое максимальное ускорение, определенное на основе рабочей величины ускорения (т.е. величины нажатия педали акселератора), или целевая частота вращения, соответствующая требуемому максимальному ускорению, превышает требуемую частоту вращения Nespi, соответствующую задающему SPI, указываемая частота вращения, соответствующая рабочей величине ускорения, задается равной частоте вращения, полученной посредством интерполяции между требуемой частотой вращения Nespi, соответствующей задающему SPI, и частотой вращения Nemax, соответствующей максимальному сформированному ускорению, согласно рабочей величине ускорения. Таким образом, допустимый запас Nemargin увеличения частоты вращения на скорости транспортного средства в момент времени, в который обнаруживается указываемая частота вращения, соответствующая рабочей величине ускорения, вычисляется посредством следующего уравнения: Nemargin=Nemax-Nespi.
Допустимый запас Nemargin увеличения частоты вращения интерполируется из степени открытия дросселя от 0% до 100%, и статическая требуемая частота Nereq_st вращения, соответствующая степени Pa открытия дросселя в этот момент времени, определяется. В этом случае, предпочтительно, чтобы интерполяция указываемой частоты вращения на основе степени открытия дросселя отличалась в зависимости от задающего SPI, так чтобы интерполяция близко к линейной интерполяции выполнялась, когда задающий SPI большой, и нелинейная интерполяция выполнялась, когда задающий SPI небольшой. Как результат, в состоянии с высоким задающим SPI, динамические рабочие характеристики или характеристика вождения, адаптированные к намерению водителя, могут быть получены. Дополнительно, в состоянии с низким задающим SPI можно не допускать вызывание ощущения дискомфорта вследствие перехода от управления на основе задающего SPI к управлению на основе степени открытия дросселя или варьирования в поведении транспортного средства, вызываемого посредством такого перехода.
Чтобы удовлетворять потребность приведения в движение водителя, а также не допускать ощущения дискомфорта, предпочтительно, чтобы чувствительность к управлению (т.е. динамическая требуемая частота вращения) для достижения частоты вращения двигателя, соответствующей величине нажатия педали акселератора, отличалась в зависимости от задающего SPI, что является спортивностью. Пример такого управления поясняется ниже посредством использования временной диаграммы, показанной на фиг. 11. Когда транспортное средство выполняет поворот в состоянии, в котором предварительно определенный задающий SPI задан, и целевая частота вращения (двигателя), обнаруженная на основе величины нажатия педали акселератора в это время, меньше требуемой частоты вращения (двигателя), определенной на основе задающего SPI, управление, которое изменяет задающий SPI, ограничивается или запрещается, предыдущее значение задающего SPI поддерживается, и требуемая частота вращения, определенная на основе задающего SPI, рассматривается в качестве указываемой частоты вращения.
Когда транспортное средство завершает поворот, и водитель нажимает педаль акселератора в значительной степени (момент t21 времени), градиент увеличения целевой частоты вращения задается, например, так, чтобы получать целевую частоту вращения, соответствующую величине нажатия педали акселератора. Этот градиент является вышеуказанной чувствительностью к управлению. Дополнительно, когда целевая частота вращения в этом процессе является динамической требуемой частотой вращения, и задающий SPI является большим, градиент является высоким, а когда задающий SPI является низким, градиент является небольшим. После того, как целевая частота вращения, которая увеличивается при градиенте, заданном таким образом, превышает требуемую частоту вращения, определенную на основе задающего SPI, целевая частота вращения, определенная на основе степени открытия дросселя, рассматривается в качестве указываемой частоты вращения для управления частотой вращения. Таким образом, на фиг. 11, в состоянии с высоким задающим SPI управление частотой вращения на основе целевой частоты вращения выполняется в момент t22 времени и далее, а в состоянии с низким задающим SPI управление частотой вращения на основе целевой частоты вращения выполняется в момент t23 времени и далее. Когда скорость транспортного средства является высокой, управление может выполняться идентично случаю высокого задающего SPI, а когда скорость транспортного средства является низкой, управление может выполняться идентично случаю низкого задающего SPI.
Следовательно, когда высокая спортивность требуется или когда транспортное средство движется с высокой спортивностью, значительное увеличение величины потребности приведения в движение, определенной посредством операции ускорения и т.п., приводит к тому, что указываемая частота вращения увеличивается быстро и на высокой скорости варьирования. Как результат, чувствительность к управлению ускорением является высокой, и режим движения, адаптированный к намерению водителя, становится возможным. Наоборот, в состоянии, в котором движение в так называемом умеренном комфортном режиме требуется, или транспортное средство движется в таком режиме, когда ускорение выполняется на основе операции ускорения, такой как степень открытия дросселя, ускорение, налагаемое посредством операции, которая требует ускорения, постепенно выполняется. Следовательно, аналогично, режим движения, адаптированный к намерению водителя, становится возможным.
Пример, в котором частота вращения или передаточное отношение управляется на основе задающего SPI, определенного вышеописанным способом, поясняется ниже. В примере, показанном на фиг. 12, целевая ступень переключения передач и целевой крутящий момент двигателя определяются из требуемой мощности приведения в движение. В базовой конфигурации такого управления, во-первых, требуемая мощность приведения в движение вычисляется из скорости транспортного средства и величины нажатия педали акселератора (этап B1). Поскольку требуемая мощность приведения в движение определяется посредством веса транспортного средства и динамической эффективности, предоставляемой для колес, вычисление на этапе B1 выполняется посредством подготовки карты, на которой требуемая мощность приведения в движение ассоциирована со скоростью транспортного средства и величиной нажатия педали акселератора, и требуемая мощность приведения в движение определяется на основе карты. Ступень переключения передач (ступень коробки переключения передач) вычисляется на основе требуемой мощности приведения в движение (этап B2). Управление переключением передач многоступенчатой трансмиссии выполняется на основе схемы переключения передач, на которой области ступени переключения передач или линия переключения коробки передач на более высокую передачу и линия переключения коробки передач на более низкую передачу задаются посредством рассмотрения скорости транспортного средства и требуемой мощности приведения в движение в качестве параметров. Следовательно, вычисление ступеней переключения передач на этапе B2 выполняется на основе схемы переключения передач, которая подготовлена заранее. Требуемая ступень переключения передач, определенная таким образом, выводится в качестве сигнала команды управления в устройство управления переключением передач (ECT) B3, и управление переключением передач в трансмиссии 13 выполняется. Когда блокировочная муфта (LU) предоставляется в силовой передаче транспортного средства 1, зацепление-расцепление LU определяется на основе карты, которая подготовлена заранее, и сигнал команды управления, который управляет зацеплением и расцеплением, также выводится.
Между тем, требуемый крутящий момент двигателя вычисляется на основе требуемой мощности приведения в движение, определенной на этапе B1, и фактической ступени переключения передач в трансмиссии 13 (этап B4). Таким образом, поскольку частота вращения двигателя определяется на основе ступени переключения передач и скорости транспортного средства, требуемый крутящий момент двигателя может быть вычислен на основе частоты вращения двигателя и требуемой мощности приведения в движение. Двигатель (ENG) 8 управляется так, чтобы формировать крутящий момент двигателя, который определен таким образом (этап B5). Более конкретно, степень открытия дросселя управляется.
Как описано выше, в устройстве управления в соответствии с изобретением, когда продольное ускорение Gx, поперечное ускорение Gy или составное ускорение, в котором комбинируются два вышеозначенных ускорения, является высоким, задающий SPI увеличивается, и требуемое максимальное ускорение увеличивается, соответственно. Требуемое максимальное ускорение отражается при управлении переключением передач, как пояснено со ссылкой на фиг. 6, и если ступень переключения передач, определенная на основе задающего SPI в спортивном режиме (спортивная), является ступенью переключения передач на стороне скорости транспортного средства, более низкой, чем скорость транспортного средства ступени переключения передач в (обычном) нормальном режиме, эта ступень переключения передач на стороне низкой скорости транспортного средства становится конечной указываемой ступенью переключения передач. В базовой конфигурации, поясненной со ссылкой на фиг. 12, выполняется управление переключением передач в нормальном режиме. Следовательно, когда конечная указываемая ступень переключения передач на основе задающего SPI является ступенью переключения передач на стороне низкой скорости транспортного средства, она рассматривается на этапе B2 и допускается в качестве требуемой ступени переключения передач. Как результат, относительно высокое передаточное отношение задается, и, следовательно, рабочие характеристики ускорения увеличиваются в качестве характеристики поведения транспортного средства.
Дополнительно, чтобы получать характеристику ускорения, соответствующую задающему SPI, мощность, выведенная посредством двигателя 8, может повышаться или понижаться, и при этом управлении скорректированная мощность приведения в движение вводится на вышеуказанном этапе B1, и требуемая мощность приведения в движение, определенная в вышеуказанной базовой конфигурации, повышается или понижается посредством скорректированной мощности приведения в движение. Скорректированная мощность приведения в движение может быть выполнена с возможностью определения на основе вышеуказанного задающего SPI. Например, можно устанавливать взаимосвязь между задающим SPI и скорректированной мощностью приведения в движение посредством тестов или моделирования, подготавливать эту взаимосвязь заранее в качестве данных в форме карты и т.п. и определять скорректированную мощность приведения в движение из данных, к примеру, карты скорректированной мощности приведения в движение и задающего SPI, полученного во время приведения в движение.
В примере, показанном на фиг. 13, ступень переключения передач (ступень коробки переключения передач) и требуемая мощность приведения в движение определяются параллельно из скорости транспортного средства и величины нажатия педали акселератора. Как описано выше, передаточное отношение многоступенчатой трансмиссии управляется на основе схемы переключения передач, на которой ступени переключения передач или линия переключения коробки передач на более высокую передачу и линия переключения коробки передач на более низкую передачу задаются посредством скорости транспортного средства и величины нажатия педали акселератора. Следовательно, с одной стороны, ступень переключения передач вычисляется из скорости транспортного средства и величины нажатия педали акселератора (этап B12), и с другой стороны, требуемая мощность приведения в движение вычисляется из скорости транспортного средства и величины нажатия педали акселератора (этап B11). Такое вычисление требуемой мощности приведения в движение является аналогичным вычислению, выполняемому на вышеуказанном этапе B1, показанном на фиг. 12.
Требуемая ступень переключения передач, определенная на этапе B12, передается в ECT B13, и управление переключением передач в трансмиссии 13 выполняется. Когда LU предоставляется в силовой передаче транспортного средства 1, зацепление-расцепление LU определяется на основе карты, которая подготовлена заранее, и сигнал команды управления, который управляет зацеплением и расцеплением, также выводится.
Между тем, требуемый крутящий момент двигателя вычисляется на основе требуемой мощности приведения в движение, определенной на этапе B11, и фактической ступени переключения передач в трансмиссии 13 (этап B14), и двигатель (ENG) 8 управляется так, чтобы формировать крутящий момент двигателя, который определен таким образом (этап B15). Управление на этапе B14 является аналогичным управлению на вышеописанном этапе B4, показанном на фиг. 12, и управление на этапе B15 является аналогичным управлению на вышеописанном этапе B5, показанном на фиг. 12.
В конфигурации, показанной на фиг. 13, когда конечная указываемая ступень переключения передач на основе задающего SPI является ступенью переключения передач на стороне более низкой скорости транспортного средства, она рассматривается на этапе B12 и допускается в качестве требуемой ступени переключения передач. Как результат, сравнительно высокое отношение переключения передач задается, и, следовательно, рабочие характеристики ускорения увеличиваются в качестве характеристики поведения транспортного средства. Дополнительно, скорректированная мощность приведения в движение, соответствующая задающему SPI, вводится на вышеописанном этапе B11, и требуемая мощность приведения в движение, определенная в вышеописанной базовой конфигурации, повышается или понижается посредством скорректированной мощности приведения в движение.
Дополнительно, в примере, показанном на фиг. 14, трансмиссия 13 и двигатель 8 управляются независимо друг от друга на основе величины нажатия ускорения и скорости транспортного средства. Таким образом, ступень переключения передач вычисляется на основе скорости транспортного средства и величины нажатия педали акселератора (этап B22), требуемая ступень переключения передач, определенная посредством таких вычислений, передается в ECT B23, и управление переключением передач в трансмиссии 13 выполняется. Это управление является аналогичным управлению на этапе B12 и этапе B13, показанном на фиг. 13. Дополнительно, степень открытия дросселя вычисляется на основе величины нажатия педали акселератора (этап B24), и двигатель 8 управляется в ответ на степень требуемого открытия дросселя (этап B25). Когда электронный дроссельный клапан предоставляется, взаимосвязь между величиной нажатия педали акселератора и степенью требуемого открытия дросселя, в общем, нелинейная, а когда величина нажатия педали акселератора является относительно небольшой, величина варьирования степени открытия дросселя меньше величины варьирования величины нажатия педали акселератора. Когда величина нажатия педали акселератора является относительно большой, величина варьирования величины нажатия педали акселератора и величина варьирования степени открытия дросселя находятся близко к взаимно-однозначной взаимосвязи.
В базовой конфигурации, например, показанной на фиг. 14, когда конечная указываемая ступень переключения передач на основе задающего SPI является ступенью переключения передач на стороне более низкой скорости транспортного средства, она также рассматривается на этапе B22 и допускается в качестве требуемой ступени переключения передач. Как результат, относительно высокое передаточное отношение задается, и, следовательно, рабочие характеристики ускорения увеличиваются в качестве характеристики поведения транспортного средства. Дополнительно, скорректированная степень открытия дросселя, соответствующая задающему SPI, вводится на вышеуказанном B24, и требуемая степень открытия дросселя, определенная в вышеуказанной базовой конфигурации, повышается или понижается посредством скорректированной степени открытия дросселя.
Как описано выше, в устройстве управления в соответствии с изобретением, если ускорение увеличивается согласно намерению ускорять/замедлять или поворачивать транспортное средство, аналогично случаю, когда водитель выжимает педаль акселератора 12, чтобы ускорять транспортное средство, выжимает педаль 7 тормоза, чтобы замедлять транспортное средство, или вращает руль 16, чтобы поворачивать транспортное средство, задающий SPI сразу увеличивается согласно увеличению ускорения. Рабочие характеристики избыточного ускорения увеличиваются согласно увеличению задающего SPI, и получается характеристика движения, которая предоставляет так называемый спортивный режим движения согласно намерению водителя. Когда потребность в ускорении на основе операции педали акселератора водителя превышает потребность в ускорении на основе задающего SPI, эта операция водителя отражается в рабочих характеристиках ускорения, и транспортное средство ускоряется, или мощность приведения в движение увеличивается на основе операции педали акселератора водителя и скорости транспортного средства. Дополнительно, поскольку вышеуказанная операция водителя обычно выполняется так, что транспортное средство движется согласно окружению движения, к примеру, градиенту пути движения, вышеописанное изменение в характеристике движения в конечном счете отражает все намерения водителя и все окружение движения.
Дополнительно, в соответствии с изобретением, чтобы стабилизировать поведение транспортного средства во время поворота или улучшать общую характеристику управляемости во время поворота, в случае если поворот транспортного средства определяется, частота вращения или передаточное отношение на основе задающего SPI может поддерживаться, и дополнительно, в этом случае, даже если требуемая частота вращения или требуемое передаточное отношение, определенное на основе величины потребности приведения в движение, например, величины нажатия педали акселератора, изменяется, частота вращения или передаточное отношение, определенное на основе задающего SPI, может поддерживаться.
Хотя настоящее изобретение описано со ссылкой на примерные варианты осуществления, следует понимать, что изобретение не ограничено описанными вариантами осуществления. Наоборот, изобретение имеет намерением охватывать различные модификации и эквивалентные компоновки. Помимо этого, хотя различные элементы раскрытого изобретения показаны в различных примерных комбинациях и конфигурациях, другие комбинации и конфигурации, включающие в себя большее, меньшее число или только один элемент, также находятся в рамках объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670503C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2705867C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОЙ НАЖАТИЯ ПЕДАЛИ АКСЕЛЕРАТОРА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527652C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДЛЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2016 |
|
RU2712713C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ РЕЖИМА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2669660C1 |
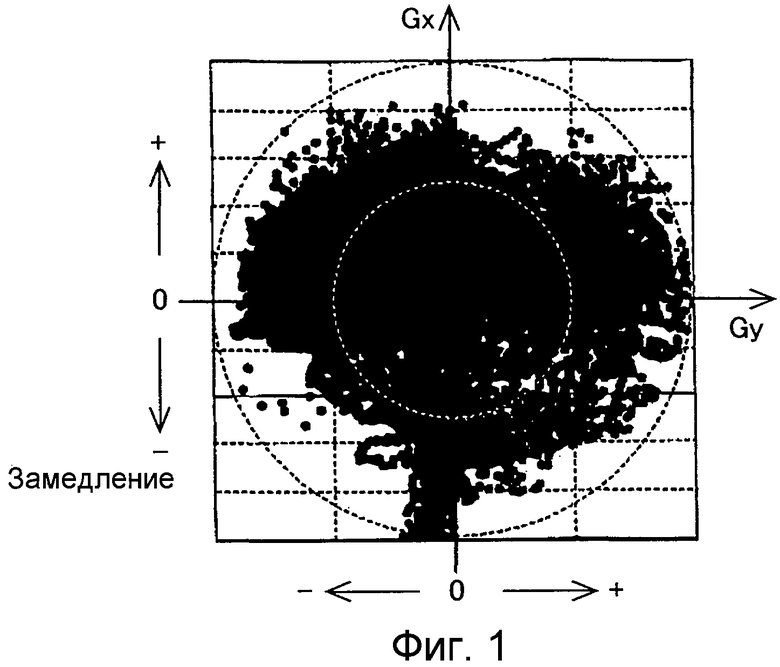
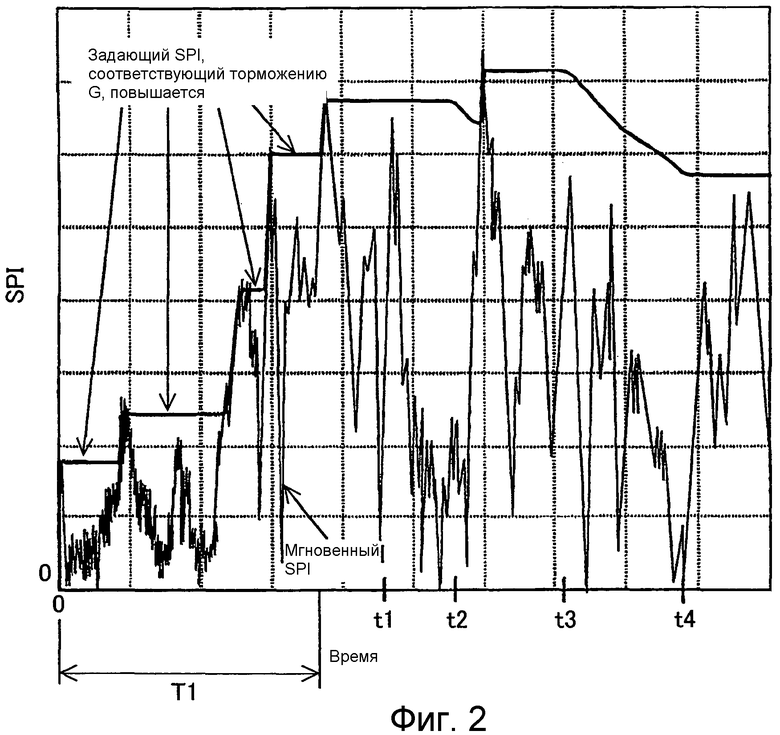
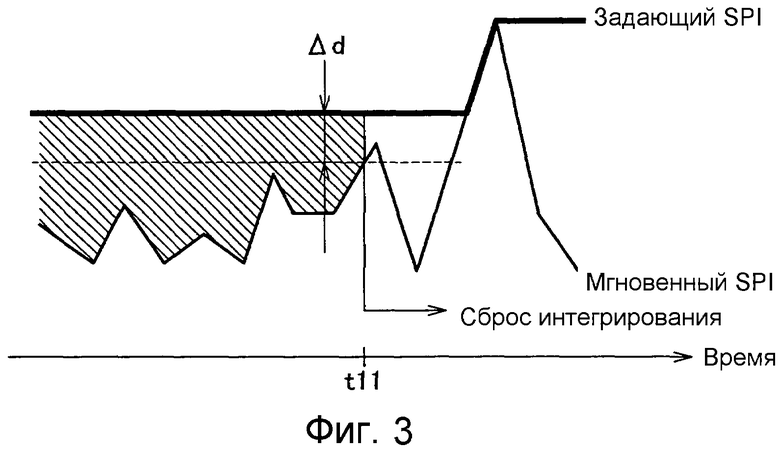
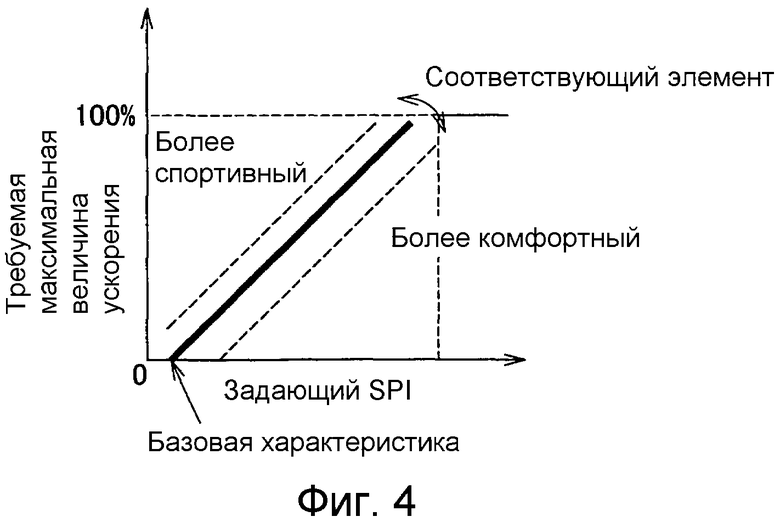
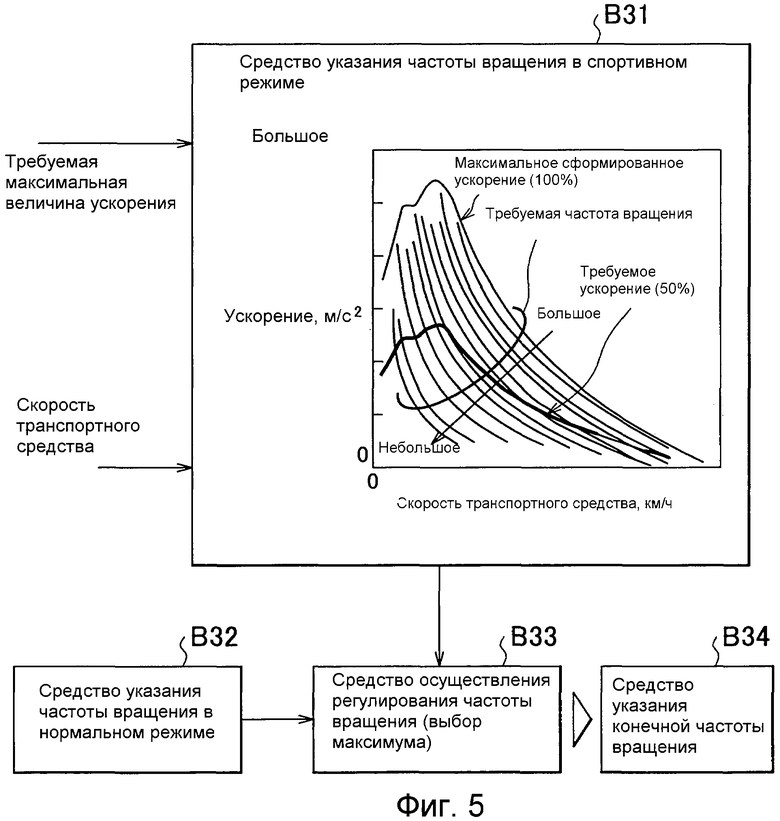

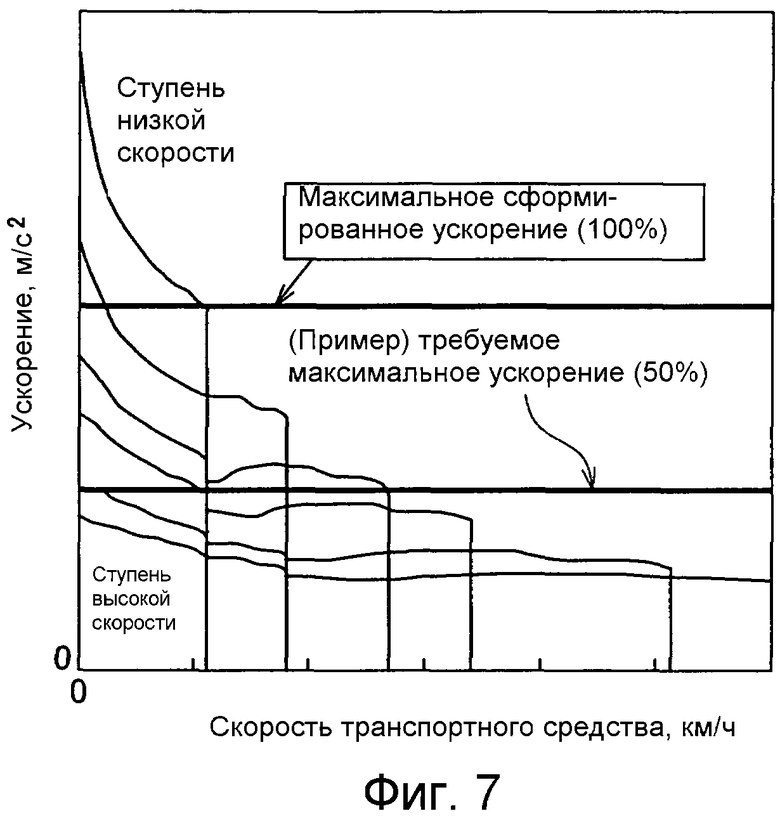
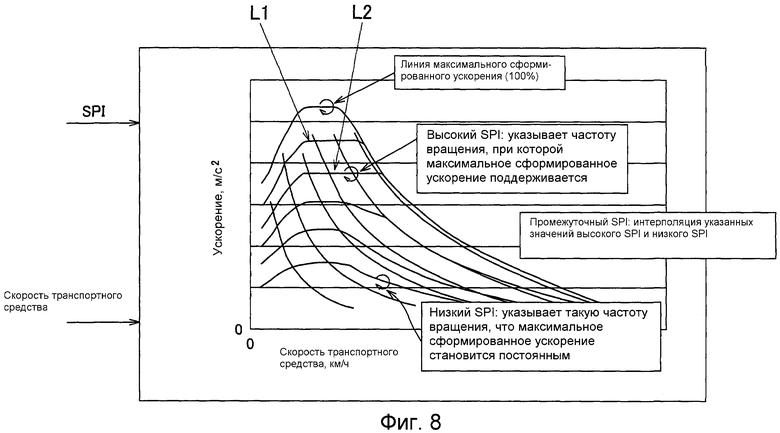
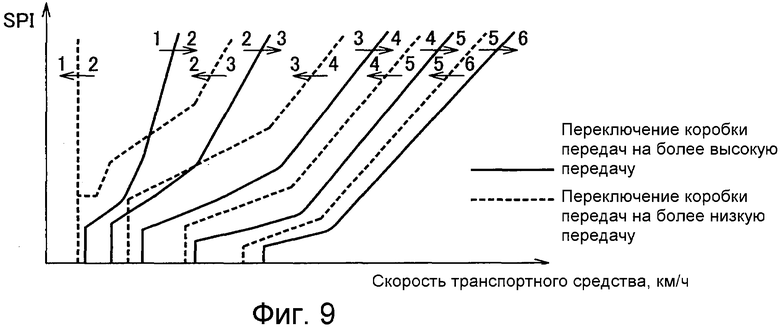
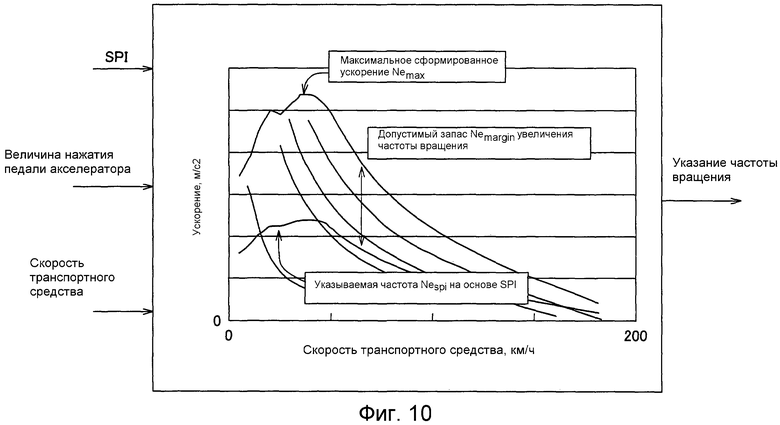
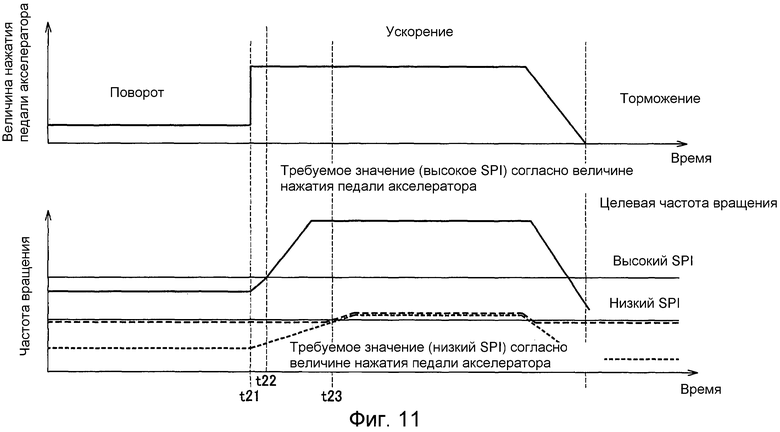
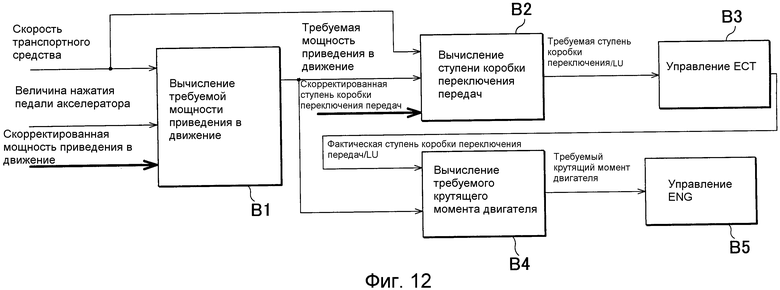
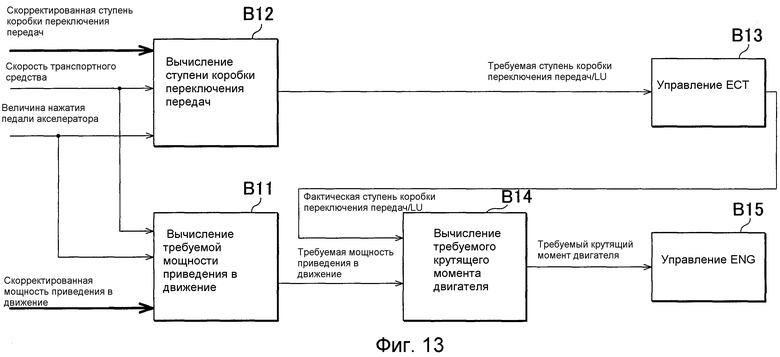
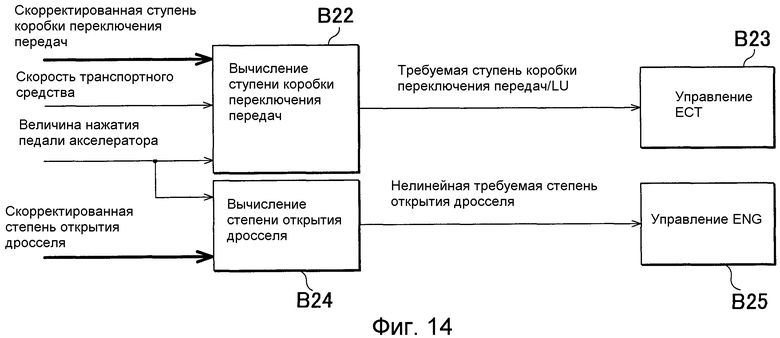
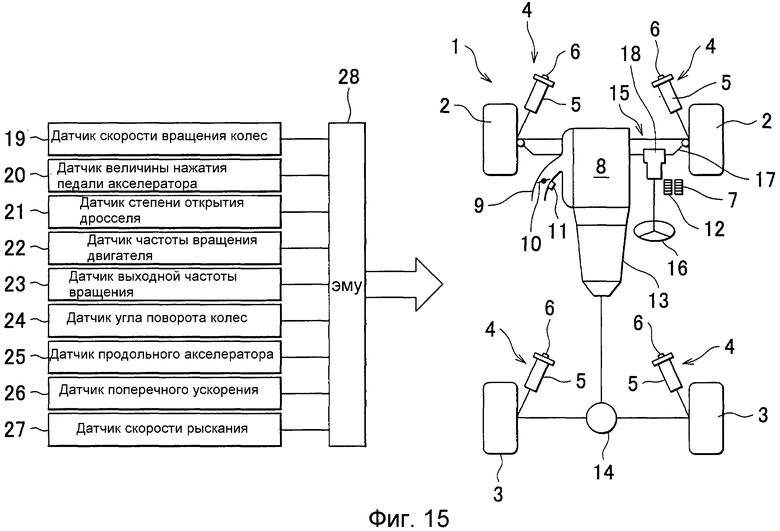
Группа изобретений относится к способу и устройству управления для транспортного средства. Устройство управления выполнено с возможностью определения индекса, управления требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса. Индекс представляет ускорение или составное ускорение. Индекс основан на состоянии движения транспортного средства, которое соответствует намерению водителя. Способ управления заключается в том, что определяют индекс и управляют требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса. Требуемая частота вращения устанавливается заранее согласно скорости транспортного средства и индексу. Технический результат заключатся в обеспечении адаптивного управления транспортным средством. 2 н. и 8 з.п. ф-лы, 15 ил.
1. Устройство управления для транспортного средства, которое управляет частотой вращения источника мощности приведения в движение или передаточным отношением трансмиссии, соединенной с выходной стороной источника мощности приведения в движение в транспортном средстве, оснащенном источником мощности приведения в движение и трансмиссией, причем устройство управления выполнено с возможностью определения индекса, который представляет ускорение или составное ускорение и который основан на состоянии движения транспортного средства, которое соответствует намерению водителя, и управления требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса, при этом требуемая частота вращения устанавливается заранее согласно скорости транспортного средства и индексу.
2. Устройство по п.1, в котором индекс определяется на основе, по меньшей мере, одного из продольного ускорения и поперечного ускорения транспортного средства.
3. Устройство по п.1, в котором требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, определяется на основе индекса, и требуемое ускорение для каждой скорости транспортного средства определяется на основе максимального сформированного ускорения и требуемой максимальной величины ускорения для каждой скорости транспортного средства, и требуемая частота вращения или требуемое передаточное отношение задаются на основе требуемого ускорения.
4. Устройство по п.1, в котором требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, определяется на основе индекса, и требуемое ускорение определяется на основе максимального сформированного ускорения и требуемой максимальной величины ускорения в момент времени, в который индекс определяется, и требуемая частота вращения или требуемое передаточное отношение поддерживаются при значении, при котором достигается это требуемое ускорение.
5. Устройство по п.1, в котором требуемая максимальная величина ускорения, которая устанавливается заранее согласно индексу, определяется на основе индекса и, когда индекс превышает предварительно определенное значение, требуемое ускорение определяется на основе максимального сформированного ускорения и требуемой максимальной величины ускорения в момент времени, в который индекс определяется, и требуемая частота вращения или требуемое передаточное отношение поддерживается при значении, при котором достигается это требуемое ускорение.
6. Устройство по п.1, в котором величина потребности приведения в движение для транспортного средства определяется и целевая частота вращения источника мощности приведения в движение или целевое передаточное отношение трансмиссии дополнительно определяется на основе величины потребности приведения в движение, и источник мощности приведения в движение управляется так, что он имеет либо требуемую частоту вращения, либо целевую частоту вращения, какая из них выше, или трансмиссия управляется так, что она имеет либо требуемое передаточное отношение, либо целевое передаточное отношение, какое из них выше.
7. Устройство по п.6, в котором скорость варьирования частоты вращения источника мощности приведения в движение в случае, если целевая частота вращения превышает требуемую частоту вращения, или скорость варьирования передаточного отношения в случае, если целевое передаточное отношение превышает требуемое передаточное отношение, задается отличающейся в зависимости от индекса.
8. Устройство по п.7, в котором, когда индекс на основе состояния движения транспортного средства является относительно большим, скорость варьирования частоты вращения или скорость варьирования передаточного отношения выше, чем когда индекс является относительно небольшим.
9. Устройство по п.1, в котором, когда транспортное средство поворачивает, варьирование требуемой частоты вращения или требуемого передаточного отношения подавляется по сравнению со случаем, в котором транспортное средство не поворачивает.
10. Способ управления для транспортного средства для управления частотой вращения источника мощности приведения в движение или передаточного отношения трансмиссии, соединенной с выходной стороной источника мощности приведения в движение в транспортном средстве, оснащенном источником мощности приведения в движение и трансмиссией, отличающийся тем, что определяют индекс, который основан на состоянии движения транспортного средства, и управляют требуемой частотой вращения источника мощности приведения в движение или требуемым передаточным отношением для трансмиссии на основе индекса, при этом требуемую частоту вращения устанавливают заранее согласно скорости транспортного средства и индексу.
| US 2008097674 A1, 24.04.2008 | |||
| JP 10269499 A, 09.10.1998 | |||
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2338653C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ ИЛИ РЕГУЛИРОВАНИЯ МОЩНОСТИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С НАДДУВОМ | 1996 |
|
RU2167325C2 |

