Область техники, к которой относится изобретение
Изобретение относится к технологии для транспортного средства, содержащего электродвигатель, который приводит в движение передние колеса, и электродвигатель, который приводит в движение задние колеса.
Уровень техники
Обычно предлагают транспортное средство, содержащее электродвигатель, который осуществляет привод передних колес, и электродвигатель, который осуществляет привод задних колес. Также было предложено транспортное средство, которое содержит электродвигатель для привода передних колес и электродвигатель для привода задних колес, как описано выше, и также содержит двигатель для привода передних колес (см., например, Патентную литературу 1).
Список литературы
Патентная литература
Патентная литература 1: Публикация № 2004-112956 KOKAI заявки на японский патент
Сущность изобретения
Техническая задача
Используя структуру, в соответствии с Патентной литературой 1, двигатель и вспомогательные устройства для двигателя, а также электродвигатель для привода передних колес предусмотрены в передней части транспортного средства. Поэтому, существует трудность выделения места для установки в нем электродвигателя, и транспортное средство становится тяжелым.
С другой стороны, что касается электромобиля, с приводом от электродвигателя, было предложение уменьшить размеры электродвигателя. Для компенсации уменьшения крутящего момента из-за уменьшения размеров электродвигателя, увеличивают коэффициент уменьшения скорости редуктора скорости, соединенного с электродвигателем для поддержания крутящего момента, который воздействует на ось. Кроме того, для компенсации уменьшения скорости вращения оси, для поддержания крутящего момента, предусмотрена система усиления, которая усиливает напряжение, подаваемое в аккумуляторную батарею, между электродвигателем и аккумуляторной батареей, которая подает в электродвигатель электроэнергию. Это позволяет осуществлять привод электродвигателя с высокой скоростью, и, поэтому, позволяет транспортному средству перемещаться в диапазоне движения с высокой скоростью.
Однако в системе усилителя используется крупная индуктивная катушка, которая повышает стоимость. Увеличение стоимости не является предпочтительным.
Цель изобретения состоит в том, чтобы предоставить транспортное средство с приводом на передние и задние колеса, в котором обеспечивалось бы уменьшение веса и снижение стоимости при поддержании возможностей движения в диапазоне движения с высокой скоростью.
Решение задачи
В транспортном средстве с приводом на передние и задние колеса, в соответствии с изобретением по пункту 1 формулы изобретения, осуществляется привод передних и задних колес. Транспортное средство с приводом на передние и задние колеса содержит первый приводной электродвигатель, который осуществляет привод одних из передних и задних колес; второй приводной электродвигатель, который осуществляет привод других из передних и задних колес и имеет максимальный крутящий момент, больший, чем максимальный крутящий момент первого приводного электродвигателя; первый редуктор скорости, который уменьшает скорость вращения первого приводного электродвигателя и передает уменьшенное вращение на одни из передних и задних колес; второй редуктор скорости, который уменьшает скорость вращения второго приводного электродвигателя с коэффициентом уменьшения скорости, меньшим, чем коэффициент уменьшения скорости первого редуктора скорости, и передает уменьшенную скорость вращения на другие из передних и задних колес. Коэффициенты уменьшения скорости первого и второго редукторов скоростей установлены таким образом, чтобы максимальная частота вращения других из передних и задних колес, соответствующая максимальной скорости вращения второго приводного электродвигателя, была больше чем максимальная скорость вращения одних из передних и задних колес, соответствующих максимальной скорости вращения первого приводного электродвигателя.
Транспортное средство с приводом на передние и задние колеса, в соответствии с изобретением, содержит электродвигатель, который осуществляет привод одних из передних и задних колес; элемент фрикционного соединения, который передает и прерывает подачу мощности от электродвигателя в одни из передних и задних колес; и контроллер элемента фрикционного соединения, который управляет элементом фрикционного соединения. Контроллер элемента фрикционного соединения обеспечивает соединение элемента фрикционного соединения, приблизительно при скорости транспортного средства, соответствующей максимальной частоте вращения первого приводного электродвигателя, и передает, таким образом, силу привода двигателя на одни из передних и задних колес.
В транспортном средстве с приводом на передние и задние колеса, в соответствии с изобретением, вращение электродвигателя передают в одни из передних и задних колес с помощью редуктора скорости, имеющего фиксированное передаточное число.
В транспортном средстве с приводом на передние и задние колеса, в соответствии с изобретением, одно из передних и задних колес представляют собой переднее колесо транспортного средства, и другое из передних и задних колес представляет собой заднее колесо транспортного средства.
В транспортном средстве с приводом передних и задних колес, в соответствии с изобретением, максимальная частота вращения первого приводного электродвигателя больше, чем максимальная частота вращения второго приводного электродвигателя.
В транспортном средстве с приводом передних и задних колес, в соответствии с изобретением, максимальная скорость вращения первого приводного электродвигателя больше, чем максимальная скорость вращения второго приводного электродвигателя.
В транспортном средстве с приводом передних и задних колес, в соответствии с изобретением, максимальная скорость вращения первого приводного электродвигателя больше, чем максимальная скорость вращения второго приводного электродвигателя.
В транспортном средстве с приводом передних и задних колес, в соответствии с изобретением, максимальная скорость вращения первого приводного электродвигателя больше, чем максимальная скорость вращения второго приводного электродвигателя.
Предпочтительные эффекты изобретения
В соответствии с настоящим изобретением, вес и стоимость транспортного средства могут быть уменьшены при поддержании возможности движения в диапазоне высоких скоростей.
Краткое описание чертежей
На фиг. 1 схематично показан вид, представляющий транспортное средство c передним и задним приводом в соответствии с первым вариантом осуществления изобретения.
На фиг. 2 показан график, представляющий характеристику переднего электродвигателя, показанного на фиг. 1.
На фиг. 3 показан график, представляющий крутящий момент, который действует на ось передних колес, в зависимости от скорости транспортного средства, показанного на фиг. 1.
На фиг. 4 показан график, представляющий характеристику заднего электродвигателя, показанного на фиг. 1.
На фиг. 5 показан график, представляющий крутящий момент, который действует на ось заднего колеса, в зависимости от скорости транспортного средства, показанного на фиг. 1.
На фиг. 6 показан график, представляющий взаимосвязь между скоростью автомобиля транспортного средства, показанного на фиг. 1 и общим крутящим моментом, действующим на ось переднего колеса, и крутящим моментом, действующим на ось заднего колеса.
На фиг. 7 схематично показан вид, представляющий транспортное средство с приводом на передние и задние колеса, в соответствии со вторым вариантом осуществления изобретения.
На фиг. 8 показан график, представляющий взаимосвязь между скоростью транспортного средства, показанного на фиг. 7, и общим крутящим моментом, действующим на ось переднего колеса транспортного средства, и крутящим моментом, действующим на ось заднего колеса.
Подробное описание изобретения
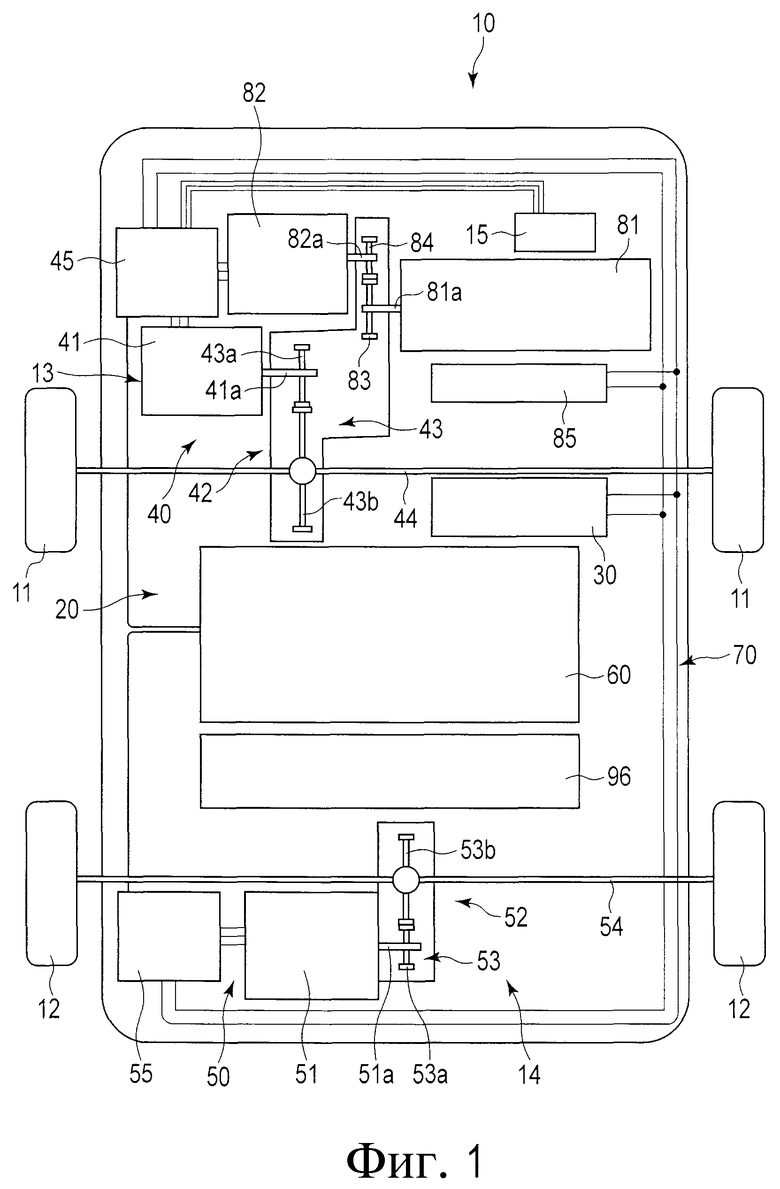
Транспортное средство с приводом на передние и задние колеса, в соответствии с изобретением, будет описано со ссылкой на фиг. 1-6. На фиг. 1 показана схема, представляющая транспортное средство 10. Транспортное средство 10 представляет собой пример транспортного средства с приводом на передние и задние колеса, в соответствии с первым вариантом осуществления изобретения.
Как показано на фиг. 1, в примере, транспортное средство 10 выполнено с возможностью его привода от переднего электродвигателя 41 и от заднего электродвигателя 51, которые будут описаны ниже. Транспортное средство 10 содержит пару передних колес 11 и пару задних колес 12 и может двигаться вперед и назад в направлениях вперед и назад транспортного средства. Передние колеса 11 предусмотрены на переднем участке 13 транспортного средства 10, как пример одного из переднего и заднего колес, на которые ссылаются в изобретении. Задние колеса 12 предусмотрены в задней части 14 транспортного средства 10, как пример других передних и задних колес, упомянутых в изобретении.
Транспортное средство 10 содержит систему 20 привода "передних и задних колес", которая выполняет привод передних колес 11 и задних колес 12, и контроллер 30 транспортного средства.
Система 20 привода передних и задних колес содержит модуль 40 привода переднего колеса, модуль 50 привода заднего колеса и аккумуляторную батарею 60.
Модуль 40 привода переднего колеса содержит передний электродвигатель 41, который может осуществлять привод передних колес 11, и механизм 42 передачи передних колес, который передает вращение переднего электродвигателя 41 на передние колеса 11. Передний электродвигатель 41 представляет собой электродвигатель, содержащий статор и ротор, и формирует трехфазный двигатель, который генерирует крутящий момент, при вращении ротора относительно статора, хотя это не показано, как пример структуры. Передний электродвигатель 41 представляет собой пример первого приводного электродвигателя, как упомянуто в изобретении. Передний электродвигатель 41 предусмотрен на переднем участке 13 транспортного средства. Например, отсек для двигателя, который содержит передний электродвигатель 41, сформирован в переднем участке 13 транспортного средства 10, и передний электродвигатель 41 может содержаться в отсеке для двигателя. Этот отсек для двигателя закрыт, так, что его можно открывать/закрывать относительно внешнего пространства транспортного средства элементом капота, который не показан.
Механизм 42 трансмиссии передних колес содержит редуктор 43 скорости передних колес и ось 44 переднего колеса. Редуктор 43 скорости передних колес уменьшает скорость вращения переднего электродвигателя 41 и передает вращение с уменьшенной скоростью на оси 44 передних колес во время вращения переднего электродвигателя 41. Редуктор 43 скорости передних колес представляет собой пример первого редуктора скорости, упомянутого в изобретении.
Редуктор 43 скорости передних колес содержит первое зубчатое колесо 43a, которое предусмотрено как одно целое с выходным валом 41a (соединен с не показанным ротором, вращение которого передают) переднего электродвигателя 41, и вращается как одно целое с выходным валом 41a, и второе зубчатое колесо 43b, которое предусмотрено на оси 44 передних колес и вращается как одно целое с осью 44 передних колес. Первое зубчатое колесо 43a и второе зубчатое колесо 43b зацеплены друг с другом.
Ось 44 передних колес соединена с передними колесами 11 и передает вращение, передаваемое на оси передних колес и далее на передние колеса. Вращение переднего электродвигателя 41 передают в каждое из передних колес 11 через первые и вторые зубчатые колеса 43a и 43b и ось 44 передних колес.
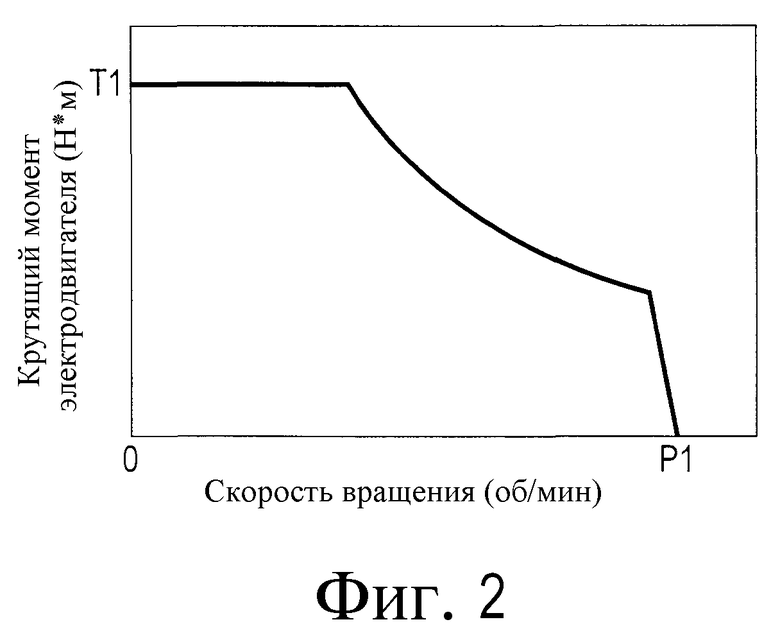
На фиг. 2 показан график, представляющий характеристику переднего электродвигателя 41. На фиг. 2 на горизонтальной оси представлена скорость вращения переднего электродвигателя 41. На горизонтальной оси отмечены единицы количества оборотов в минуту (об/мин). Продолжение вправо вдоль горизонтальной оси графика выражает увеличение количества оборотов вращения. На фиг. 2 на вертикальной оси представлен крутящий момент переднего электродвигателя 41. Единицы Н*м обозначены на вертикальной оси. Продолжение вверх вдоль вертикальной оси на графике выражает увеличение крутящего момента. Как показано на фиг. 2, максимальный крутящий момент переднего электродвигателя 41 составляет T1 Н*м. Максимальная скорость вращения переднего электродвигателя 41 составляет P1 об/мин.
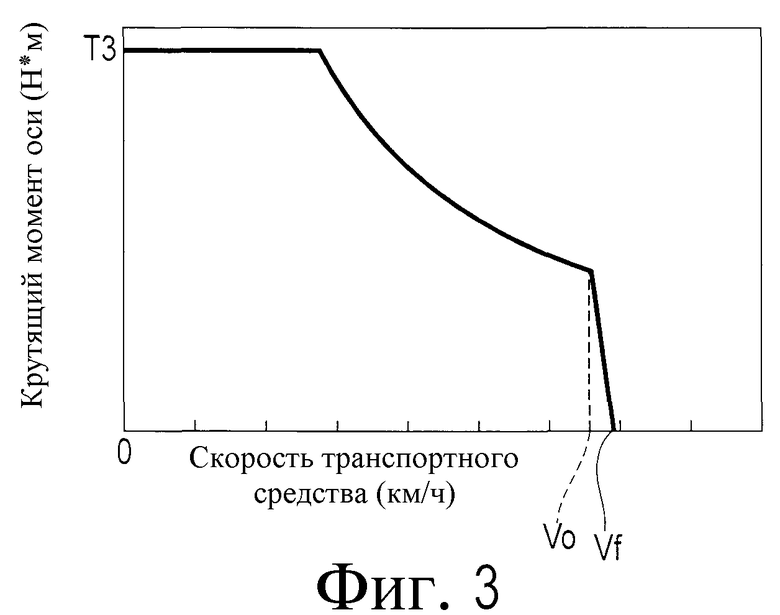
На фиг. 3 показан график, представляющий крутящий момент, который действует на ось 44 передних колес, в зависимости от скорости транспортного средства 10. На фиг. 3 по горизонтальной оси представлена скорость транспортного средства для транспортного средства 10. Используются единицы км/ч. Продолжение вправо вдоль горизонтальной оси графика выражает увеличение скорости транспортного средства. На фиг. 3 на вертикальной оси представлен крутящий момент, который действует на ось 44 передних колес. Здесь отложены единицы Н*м. Продолжение вверх вдоль вертикальной оси графика выражает увеличение крутящего момента.
Как показано на фиг. 3, передний электродвигатель 41 может быть приведен во вращение и может вращаться со скоростью Vf в час в пределах нормального диапазона привода транспортного средства 10, в качестве примера, в соответствии с настоящим вариантом осуществления. Vf представляет собой, например, по существу, 140 км/ч. Таким образом, диапазон скоростей возможного привода в движение переднего электродвигателя 41 составляет от нуля, до, по существу, 140 км/ч. Упомянутый выше диапазон скоростей возможного привода переднего электродвигателя 41 представляет собой диапазон скоростей транспортного средства 10, который может поддерживаться (в котором может быть передано вращение) от переднего электродвигателя 41. Даже когда выполняют привод только заднего электродвигателя в диапазоне скоростей за пределами 140 км/ч, передний электродвигатель переходит в холостой режим и вращается в состоянии пассивного вращения.
Передний электродвигатель 41, двигатель 81, описанный ниже, и генератор 82, также описанный ниже, предусмотрены на переднем участке 13 транспортного средства 10, и пространство для установки отдельных устройств здесь трудно выделить. Поэтому, в настоящем варианте осуществления, передний электродвигатель 41 имеет размер, который позволяет осуществлять привод в движение в диапазоне нормального диапазона движения, который требуется для транспортного средства 10. В этом отношении, конкретное описание будет представлено ниже.
Нормальный диапазон движения представляет собой другой диапазон, чем диапазон движения с высокой скоростью для выполнения движения с высокой скоростью на автотрассе, и включает в себя, например, диапазон, включающий в себя скорости для перемещения в городской черте. Нормальный диапазон движения представляет собой диапазон, вплоть до, по существу, 140 км, описанный выше, в качестве примера настоящего варианта осуществления. Популярный электродвигатель установлен с возможностью вращения в диапазоне движения с высокой скоростью, за пределами нормального диапазона передвижения, и поэтому выполнен большим. Однако, от переднего электродвигателя 41 требуется обеспечить возможность вращения только в нормальном диапазоне движения, и, поэтому, он выполнен малым.
В настоящем варианте осуществления диапазон скоростей возможного привода переднего электродвигателя 41 устанавливают, например, для нормального диапазона движения, установленного в транспортном средстве 10. Нормальный диапазон движения и диапазон движения с высокой скоростью устанавливают произвольно в транспортном средстве 10. Например, нормальный диапазон движения устанавливают от нуля до 120 км/ч, и диапазон движения с высокой скоростью устанавливают, как скорости, превышающие 120 км/ч. В этом случае передний электродвигатель может иметь размер, достаточный для обеспечения вращения до скорости 120 км/ч (включая в себя 120 км/ч). В этом случае значение Vf равняется 120 км/ч.
В настоящем варианте осуществления коэффициент уменьшения скорости для редуктора 43 скорости передних колес (первое и второе зубчатые колеса 43a и 43b) установлен таким образом, что максимальное значение крутящего момента, который действует на ось 44 передних колес, представляет собой максимальное значение T3 крутящего момента Н*м, которое установлено, как требуется для транспортного средства 10. T3 больше, чем T1 (T3>T1).
Как показано на фиг. 3, крутящий момент, который действует на ось 44 передних колес, постепенно уменьшается, в соответствии с увеличением скорости транспортного средства до момента непосредственно перед тем, как скорость транспортного средства достигает Vf. Когда скорость транспортного средства превышает Vo (исключая Vo), крутящий момент резко уменьшается. Vo представляет собой значение непосредственно перед Vf и представляет собой, например, 130 км/ч в настоящем варианте осуществления.
Передний электродвигатель 41 установлен с возможностью вращения таким образом, что, после уменьшения скорости с помощью редуктора скорости, максимальный крутящий момент, который действует на ось 44 переднего колеса, становится T3 Н*м, и скорость транспортного средства для транспортного средства 10 находится в пределах диапазона от нуля до, по существу, 140 км.
Обратный преобразователь 45 переднего электродвигателя предусмотрен на переднем участке 13. Обратный преобразователь 45 переднего электродвигателя соединен с передним электродвигателем 41 и управляет вращением переднего электродвигателя 41. В транспортном средстве 10 предусмотрена сеть 70 передачи данных, такая как, например, CAN. Обратный преобразователь 45 переднего электродвигателя соединен с сетью 70 передачи данных. Обратный преобразователь 45 переднего электродвигателя соединен с контроллером 30 транспортного средства, описанным ниже, через сеть 70 передачи данных.
Обратный преобразователь 45 переднего электродвигателя предусмотрен рядом с передним электродвигателем 41 на переднем участке 13. Обратный преобразователь 45 переднего электродвигателя преобразует постоянный ток, подаваемый от аккумуляторной батареи 60, в трехфазный переменный ток и подает этот ток в передний электродвигатель 41 для вращения переднего электродвигателя 41 в соответствии с запросом из контроллера 30 транспортного средства. Кроме того, транспортное средство 10 содержит кондиционер 15 воздуха. Кондиционер 15 воздуха соединен с обратным преобразователем 45 переднего электродвигателя и в него подают электроэнергию через обратный преобразователь 45 переднего электродвигателя.
Далее будет описан модуль 50 привода заднего колеса. Как показано на фиг. 1, модуль 50 привода заднего колеса содержит задний электродвигатель 51, который может осуществлять привод задних колес 12, механизм 52 трансмиссии задних колес, который передает вращение заднего электродвигателя 51 на задние колеса 12, и обратный преобразователь 55 заднего электродвигателя.
Задний электродвигатель 51 предусмотрен на заднем участке 14. Например, отсек для двигателя, который может содержать передний электродвигатель 51, сформирован на заднем участке 14, и задний электродвигатель 51 может быть установлен в отсеке для электродвигателя. Такой отсек для электродвигателя закрывается так, что его можно открывать/закрывать относительно внешнего пространства транспортного средства, например, с помощью элемента капота.
Задний электродвигатель 51 представляет собой электродвигатель, содержащий статор и ротор, и формирует трехфазный двигатель, который генерирует крутящий момент, при вращении ротора относительно статора, хотя это не показано, как пример конструкции. Задний электродвигатель 51 представляет собой пример электродвигателя для привода задних колес, как упомянуто в изобретении. Задний электродвигатель 51 соединен с обратным преобразователем 55 заднего электродвигателя, и им управляют так, что он вращается от обратного преобразователя 55 заднего электродвигателя. Задний электродвигатель 51 представляет собой пример второго приводного электродвигателя, как упомянуто в изобретении.
Обратный преобразователь 55 заднего электродвигателя предусмотрен рядом с задним электродвигателем 51 на заднем участке 14. Обратный преобразователь 55 заднего электродвигателя соединен с сетью 70 передачи данных. Обратный преобразователь 55 заднего электродвигателя преобразует постоянный ток, подаваемый от аккумуляторной батареи 60, в трехфазный переменный ток, и подает в передний электродвигатель 51 ток для вращении переднего электродвигателя 41, в ответ на запрос из контроллера 30 транспортного средства.
Механизм 52 передачи задних колес содержит редуктор 53 скорости задних колес, который уменьшает скорость вращения заднего электродвигателя 51, и ось 54 заднего колеса. Редуктор 53 скорости задних колес содержит третье зубчатое колесо 53a, которое предусмотрено на выходном валу 51a (на который передается вращение не показанного ротора) заднего электродвигателя 51, и вращается совместно с выходным валом 51a, и четвертое зубчатое колесо 53b, которое предусмотрено на оси 54 заднего колеса и вращается совместно с осью заднего колеса 54. Третье зубчатое колесо 53a и четвертое зубчатое колесо 53b зацеплены друг с другом. Редуктор 53 скорости заднего колеса представляет собой пример второго редуктора скорости, как упомянуто в изобретении.
Ось 54 заднего колеса соединена с парой задних колес 12 и передает вращение, передаваемое на ось заднего колеса, далее на задние колеса 12. Вращение заднего электродвигателя 51 передают на задние колеса 12 с помощью третьего и четвертого зубчатых колес 53a и 53b.
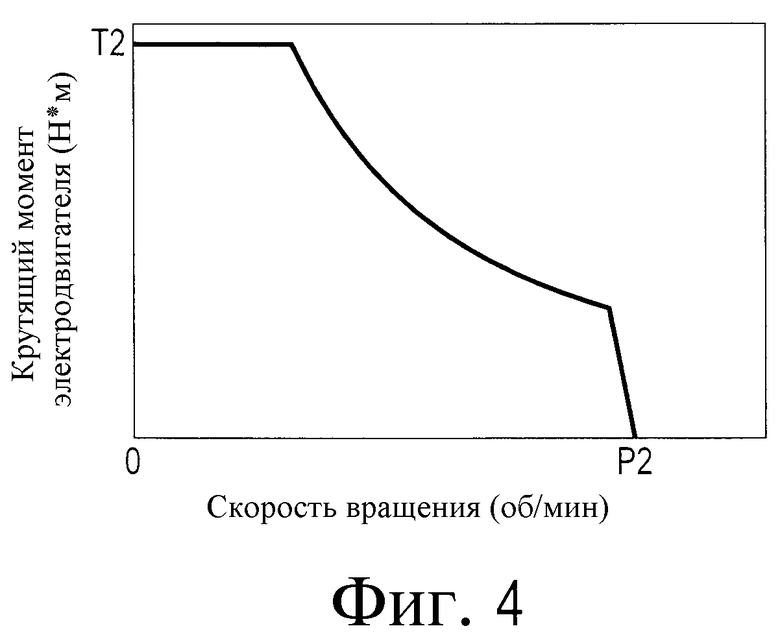
На фиг. 4 показан график, представляющий характеристику заднего электродвигателя 51. На фиг. 4, на горизонтальной оси представлена скорость вращения заднего электродвигателя 51.
Здесь обозначена единица rpm (обороты в минуту). Продолжение вправо вдоль горизонтальной оси на графике выражает увеличение скорости вращения. На фиг. 4, на вертикальной оси представлен крутящий момент заднего электродвигателя 51. Используется единица Н*м. Продолжение вверх вдоль вертикальной оси графика выражает увеличение крутящего момента. Как показано на фиг. 4, максимальный крутящий момент заднего электродвигателя 51 составляет T2 Н*м.
T2 больше, чем T1 (T2>Т1). Таким образом, электродвигатель, максимальный крутящий момент которого больше, чем у переднего электродвигателя 41, используется, как задний электродвигатель 51. Передний электродвигатель 41 и задний электродвигатель 51, каждый имеет структуру, содержащую ротор и статор, как описано выше. Поэтому, задано T2>Т1, и, соответственно, задний электродвигатель 51 выполнен более крупным, чем передний электродвигатель 41. Кроме того, максимальная скорость вращения заднего электродвигателя 51 меньше, чем максимальная скорость вращения P1 в об/мин переднего электродвигателя 41. Максимальная скорость вращения заднего электродвигателя 51 составляет P2 об/мин. P1>P2.
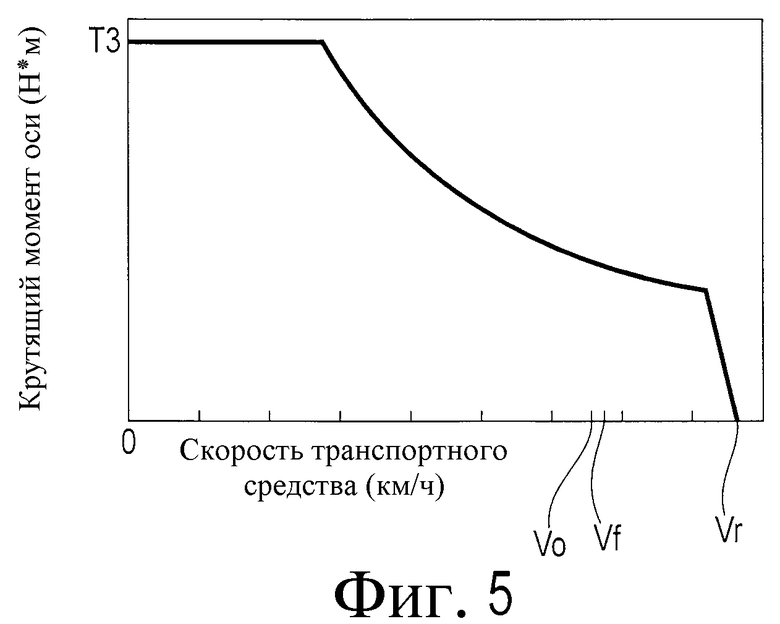
На фиг. 5 показан график, представляющий взаимосвязь между скоростью транспортного средства, для транспортного средства 10, и крутящим моментом, который действует на ось 54 заднего колеса. В настоящем варианте осуществления коэффициент уменьшения скорости для редуктора 53 скорости заднего колеса (третье и четвертое зубчатые колеса 53a и 53b) установлен таким образом, чтобы максимальное значение крутящего момента, который действует на ось 54 заднего колеса, составляло максимальное значение T3 крутящего момента Н*м, которое установлено, как требуется для транспортного средства 10 (T3>T2).
В настоящем варианте осуществления коэффициент уменьшения скорости редуктора 53 скорости заднего колеса меньше, чем у редуктора 43 скорости переднего колеса. Коэффициенты уменьшения скорости редуктора 43 скорости передних колес и редуктора скорости 53 заднего колеса установлены таким образом, что максимальное значение крутящего момента, который действует на ось 44 переднего колеса, равно максимальному значению крутящего момента, который действует на ось 54 заднего колеса, даже, когда максимальный крутящий момент переднего электродвигателя 41 отличается от максимального крутящего момента заднего электродвигателя 51.
Как показано на фиг. 5, задний электродвигатель 51 установлен с возможностью вращения, даже когда скорость транспортного средства 10 находится в диапазоне движения с высокой скоростью. В настоящем варианте осуществления задний электродвигатель 51 может вращаться до тех пор, пока не будет достигнута скорость в Vr в час. Vr, по существу, равняется 170 км/ч, в качестве примера в настоящем варианте осуществления. В настоящем варианте осуществления диапазон скоростей движения заднего электродвигателя 51 составляет от нуля до, по существу, 170 км/ч. Упомянутый выше диапазон скоростей движения для заднего электродвигателя 51 составляет диапазон скоростей транспортного средства 10, который может поддерживаться (в котором может быть передано вращение) с помощью заднего электродвигателя 51. Таким образом, максимальная скорость вращения задних колес 12 установлена большей, чем максимальная скорость вращения передних колес 11.
Взаимосвязь между передним электродвигателем 41 и задним электродвигателем 51, как описано выше, установлена так, чтобы удовлетворять взаимосвязи, включающей в себя пункты 1-3, представленные ниже.
1. Максимальная скорость вращения переднего электродвигателя 41 больше, чем у заднего электродвигателя 51.
2. Коэффициент уменьшения скорости редуктора 53 скорости задних колес меньше, чем у редуктора 43 скорости передних колес, и максимальные значения крутящих моментов, которые, соответственно, действуют на ось 44 переднего колеса, и ось 54 заднего колеса могут быть равны.
3. Максимальная скорость вращения задних колес 12, соответствующая максимальной скорости вращения заднего электродвигателя 51, больше, чем максимальная скорость вращения передних колес 11, соответствующая максимальной скорости вращения переднего электродвигателя 41. Упомянутая выше взаимосвязь максимальной скорости вращения задних колес 12, которая больше, чем у передних колес 11, выражает то же самое, что и взаимосвязь максимальной скорости Vr в час заднего электродвигателя 51, которая больше, чем максимальная скорость Vf в час переднего электродвигателя 41.
Транспортное средство 10 содержит двигатель 81, генератор 82 и контроллер 85 двигателя. Двигатель 81, генератор 82 и контроллер 85 двигателя имеют функцию заряда аккумуляторной батареи 60. Аккумуляторная батарея 60 предусмотрена, по существу, в центре транспортного средства 10. Двигатель 81 предусмотрен в передней части 13. Двигатель 81 может быть установлен в отсеке для двигателя, например, так же, как передний электродвигатель 41. Вращение двигателя 81 передают к генератору 82 через четвертое и пятое зубчатые колеса 83 и 84. Генератор 82 предусмотрен на переднем участке 13.
Четвертое зубчатое колесо 83 предусмотрено на выходном валу 81a двигателя 81 и вращается как одно целое с выходным валом 81a. Пятое зубчатое колесо 84 предусмотрено на валу 82a вращения генератора 82, и вращается как одно целое с валом 82a вращения. Четвертое и пятое зубчатые колеса 83 и 84 зацеплены друг с другом.
Двигателем 81 управляют с помощью контроллера 85 двигателя. Контроллер 85 двигателя соединен с сетью 70 передачи данных и осуществляет привод двигателя 81 под управлением контроллера 30 транспортного средства, описанного ниже.
Когда топливо подают из топливного бака 96, и двигатель 81 приведен во вращение, вращение двигателя 81 передают на генератор 82, который генерирует электроэнергию. Топливный бак 96 предусмотрен, по существу, в центре транспортного средства 10. Генератор 82 предусмотрен рядом с обратным преобразователем 45 переднего электродвигателя в переднем модуле. Генератор 82 соединен с обратным преобразователем 45 переднего электродвигателя, и электроэнергией, генерируемой генератором 82, заряжают аккумуляторную батарею 60 через обратный преобразователь 45 переднего электродвигателя.
Контроллер 30 транспортного средства соединен с сетью 70 передачи данных. Контроллер 30 транспортного средства соединен с датчиком педали ускорения, который не показан, и определяет степень нажатия ногой на педаль ускорения.
Контроллер 30 транспортного средства передает сигнал в обратный преобразователь 45 переднего электродвигателя и в обратный преобразователь 55 заднего электродвигателя для вращения переднего электродвигателя 41 и заднего электродвигателя 51 в соответствии со степенью нажатия ногой на педаль ускорения (для вращения в соответствии со скоростью транспортного средства, требуемой для транспортного средства 10). Контроллер 30 транспортного средства определяет результат детектирования датчика транспортного средства скорости, который не показан, и, соответственно, скорость транспортного средства для транспортного средства 10.
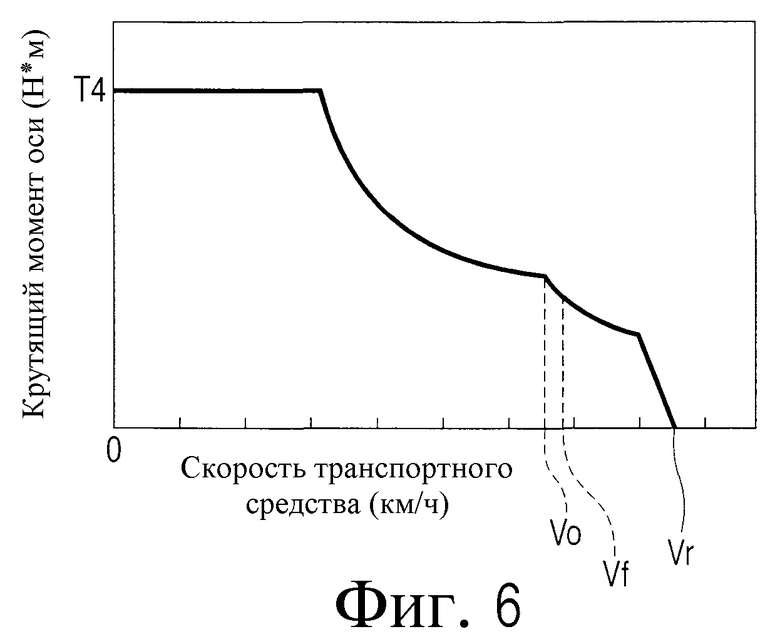
На фиг. 6 показан график, представляющий взаимосвязь между скоростью транспортного средства для транспортного средства 10 и суммарным крутящим моментом, воздействующим на ось 44 передних колес, и крутящим моментом, воздействующим на ось 54 заднего колеса. Другими словами, на фиг. 6 показана скорость транспортного средства для транспортного средства 10, и крутящие моменты, которые действуют на транспортное средство 10. На фиг. 6, по горизонтальной оси представлена скорость транспортного средства для транспортного средства 10. Здесь отмечены единицы км/ч. В направлении вправо на графике выражено увеличение скорости транспортного средства. На фиг. 6, на вертикальной оси представлен суммарный крутящий момент, действующий на ось 44 передних колес, и крутящий момент, действующий на ось 54 заднего колеса. Отмечены единицы Н*м. Направление вверх на графике выражает увеличение крутящего момента.
На фиг. 6, в диапазоне скоростей вращения, в котором передний электродвигатель 41 может вращаться (от нуля до скорости Vf в час в диапазоне нормального движения, в соответствии с настоящим вариантом осуществления), передний электродвигатель 41 и задний электродвигатель 51 работают одновременно, и транспортное средство 10, поэтому, имеет привод на четыре колеса. Максимальное значение крутящего момента, который действует на ось 44 переднего колеса, и максимальное значение крутящего момента, который действует на ось 54 заднего колеса, установлены равными по значению. Поэтому, в нормальном диапазоне движения степень свободы при управлении может быть улучшена, когда крутящими моментами, действующими на передние колеса 11 и на задние колеса 12, управляют для адаптации к движению.
Когда скорость транспортного средства превышает нормальный диапазон движения (когда максимальная скорость вращения переднего электродвигателя 41 превышена, то есть, превышено Vf на фигуре, исключая Vf), только задний электродвигатель 51 приводят во вращение, и, поэтому, выполняют движение с приводом задних колес. Максимальное значение крутящего момента, который действует на транспортное средство 10, составляет T4 Н*м. T4 в два раза больше, чем T3.
Когда величина электрического заряда аккумуляторной батареи 60 становится малой, контроллер 30 транспортного средства затем осуществляет привод двигателя 81. Когда выполняют привод от двигателя 81, вращение выходного вала 81a двигателя 81 передают в генератор 82. Генератор 82 принимает значение вращения двигателя 81 и генерирует электрическую мощность. Электрическую мощность, генерируемую генератором 82, заряжают в аккумуляторной батарее 60 через обратный преобразователь 45 переднего электродвигателя.
Далее будет описана работа транспортного средства 10. Когда водитель нажимает ногой на педаль ускорения, которая не показана, для начала движения транспортного средства 10, контроллер 30 транспортного средства затем передает запрос на вращение в передний электродвигатель 41 и запрос на вращение в задний электродвигатель 51, в соответствии со степенью нажатия ногой. Вместо запроса на вращение может быть передан запрос на крутящий момент.
Обратный преобразователь 45 переднего электродвигателя преобразует постоянный ток, подаваемый от аккумуляторной батареи 60 в трехфазный переменный ток и подает в передний электродвигатель 41 ток для вращения переднего электродвигателя 41 с частотой вращения, в соответствии с запросом, принятым из контроллера 30 транспортного средства.
Обратный преобразователь 55 заднего электродвигателя преобразует постоянный ток, подаваемый из аккумуляторной батареи 60, в трехфазный переменный ток, и подает в задний электродвигатель 51 ток для вращения заднего электродвигателя 51 со скоростью вращения, в соответствии с запросом, принятым из контроллера 30 транспортного средства.
Как показано на фиг. 6, до тех пор, пока скорость транспортного средства для транспортного средства 10 не превысит диапазон скоростей движения переднего электродвигателя 41, то есть пока скорость транспортного средства для транспортного средства 10 не превысит диапазон нормального движения, транспортное средство 10 выполняет привод на четыре колеса, при котором передние и задние колеса 11 и 12 приводят в движение с помощью переднего электродвигателя 41 и заднего электродвигателя 51.
Когда скорость транспортного средства для транспортного средства 10 превышает диапазон скоростей движения переднего электродвигателя 41, то есть, когда превышен нормальный диапазон движения, контроллер 30 транспортного средства передает сигнал на остановку привода переднего электродвигателя 41. Обратный преобразователь 45 переднего электродвигателя принимает этот сигнал и затем прекращает подачу тока в передний электродвигатель 41. Когда диапазон скорости движения переднего электродвигателя 41 превышен, привод транспортного средства 10 осуществляется только от заднего электродвигателя 51.
Когда определяют, что величина электрического заряда аккумуляторной батареи 60 мала, контроллер 30 транспортного средства затем осуществляет привод от двигателя 81.
В транспортном средстве 10, выполненном таким образом, диапазон скоростей движения переднего электродвигателя 41 установлен, как нормальный диапазон движения (диапазон от нуля до, по существу, 140 км/ч, в качестве примера, в настоящем варианте осуществления), и только задний электродвигатель 51 осуществляет привод в диапазоне высокой скорости движения. Поэтому, передний электродвигатель 41 может быть выполнен меньшим по размерам, и вес транспортного средства 10 может быть уменьшен, при поддержании возможности движения в диапазоне движения с высокой скоростью.
Кроме того, электродвигатель, имеющий малый диапазон скоростей движения, используется, как передний электродвигатель 41, и передний электродвигатель 41 может быть выполнен меньшим по размерам на переднем участке 13, где предусмотрены двигатель 81 и генератор 82. В соответствии с этим, передний электродвигатель 41 может быть удовлетворительно расположен даже на переднем участке 13, в котором имеется относительно мало места. Кроме того, степень свободы компоновки улучшается.
Другими словами, в результате использования одних из передних и задних колес, которые обозначены в изобретении, в качестве передних колес, может быть улучшена степень свободы компоновки переднего участка 13, где предусмотрен электродвигатель для привода передних колес.
Поскольку не требуется система усилителя, обеспечивающая вращение переднего электродвигателя 41 в диапазоне движения с высокой скоростью, можно исключить существенное увеличение стоимости транспортного средства 10.
Даже когда максимальная скорость вращения переднего электродвигателя 41 больше, чем у заднего электродвигателя 51, то есть когда задний электродвигатель 51 больше, чем передний электродвигатель 41, максимальная скорость вращения задних колес 12, соответствующая максимальной скорости вращения заднего электродвигателя 51, может быть сделана большей, чем максимальная скорость вращения передних колес 11, соответствующая максимальной скорости вращения переднего электродвигателя 41, в результате уменьшения коэффициента понижения скорости редуктора 53 скорости задних колес, который должен быть меньше, чем у редуктора 43 скорости передних колес.
В настоящем варианте осуществления передние колеса 11 используются, как пример одних из передних и задних колес, как упомянуто в изобретении, и задние колеса 12 используются, как пример других из передних и задних колес, как упомянуто в изобретении. Передний электродвигатель 41 используется, как пример первого приводного электродвигателя, как упомянуто в изобретении, и задний электродвигатель 51 используется, как пример второго приводного электродвигателя, как упомянуто в изобретении.
Однако, даже при другой структуре, уменьшение веса и снижение стоимости могут быть достигнуты при поддержании способности движения даже в диапазоне движения с высокой скоростью. Например, задние колеса 12 могут представлять собой другой пример одних из передних и задних колес, как упомянуто в изобретении, и задний электродвигатель 51 может использоваться, как другой пример первого приводного электродвигателя. Передние колеса 11 могут представлять собой другой пример других одних из передних и задних колес, как упомянуто в изобретении, и передний электродвигатель 41 может использоваться, как другой пример второго приводного электродвигателя. В этом случае, задний электродвигатель 51 может быть выполнен меньшим по размерам, и, поэтому, степень свободы компоновки заднего участка 14 транспортного средства 10 может быть улучшена.
Далее транспортное средство с приводом на передние и задние колеса, в соответствии со вторым вариантом осуществления изобретения, будет описано со ссылкой на фиг. 7-8.
Части конфигурации, которые имеют те же функции, что и представленные в первых вариантах осуществления, обозначены теми же номерами ссылочных позиций, что и в первом варианте осуществления, и будут исключены из представленного ниже описания.
В настоящем варианте осуществления двигатель 81 используется для обеспечения движения транспортного средства 10, путем вращения передних колес 11, в дополнение к использованию привода для заряда электричества. Таким образом, в настоящем варианте осуществления транспортное средство 10 представляет собой гибридный электромобиль, который также может быть приведен в движение от переднего электродвигателя 41, заднего электродвигателя 51 и двигателя 81. Настоящий вариант осуществления отличается от первого варианта осуществления тем, что двигатель 81 используется для движения, как описано выше. Другие структуры являются теми же, что и в первом варианте осуществления.
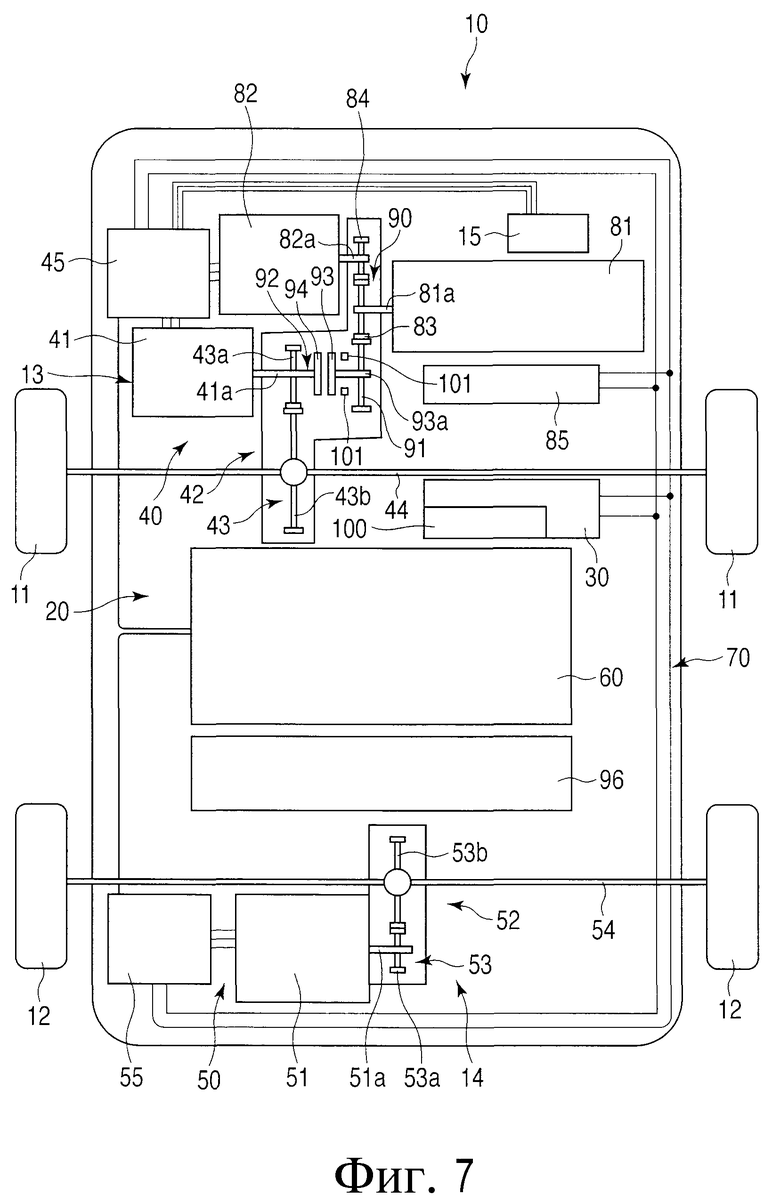
На фиг. 7 схематично показан вид, представляющий транспортное средство 10, в соответствии с настоящим вариантом осуществления. Как показано на фиг. 7, механизм 42 трансмиссии передних колес содержит редуктор 90 скорости двигателя, который передает вращение от двигателя 81 на передние колеса 11 для того, чтобы двигатель 81 мог вращать передние колеса 11. В настоящем варианте осуществления, двигатель 81 также выполняет функцию части модуля 40 привода передних колес. Редуктор 90 скорости двигателя имеет постоянный и неизменный коэффициент замедления скорости. Он представляет собой пример редуктора скорости, имеющего постоянное передаточное число, как упомянуто в изобретении.
Редуктор 90 скорости двигателя содержит четвертое зубчатое колесо 83, предусмотренное на выходном валу 81a двигателя 81, шестое зубчатое колесо 91 и механизм 92 сцепления. Шестое зубчатое колесо 91 зацеплено с четвертым зубчатым колесом 83. Механизм 92 сцепления представляет собой пример элемента фрикционного соединения, как упомянуто в изобретении.
Механизм 92 сцепления содержит пластину 94 и диск 93 сцепления. Часть 93a вала предусмотрена на конце диска 93 сцепления таким образом, что шестое зубчатое колесо 91 вращается, как единое целое с частью 93a вала. Поэтому шестое зубчатое колесо 91 и диск 93 сцепления вращаются как единое целое. Пластина 94 предусмотрена как одно целое на конце выходного вала 41a переднего электродвигателя 41 и вращается как одно целое с выходным валом 41a.
Элемент 101 привода предусмотрен рядом с диском 93 сцепления. На диск 93 сцепления нажимают с помощью элемента 101 привода, вводя его в контакт с пластиной 94. Кроме того, элемент 101 привода перемещает диск 93 сцепления в положение на расстоянии от пластины 94.
Соединенное состояние механизма 92 сцепления означает, что механизм 92 сцепления прижат в контакт с пластиной 94, и диск 93 сцепления, и пластина 94 вращаются, как единое целое. Разъединенное состояние механизма 92 сцепления означает, что диск 93 сцепления и пластина 94 не находятся в контакте друг с другом, но находятся на расстоянии друг от друга, и, поэтому, вращение любого одного из диска 93 сцепления и пластины 94, не передают на другое.
Операцией элемента 101 привода управляют с помощью контроллера 100 механизма включения сцепления. Контроллер 100 механизма сцепления предусмотрен в контроллере 30 транспортного средства. Контроллер 100 механизма сцепления представляет собой пример контроллера элемента фрикционного соединения, как упомянуто в изобретении.
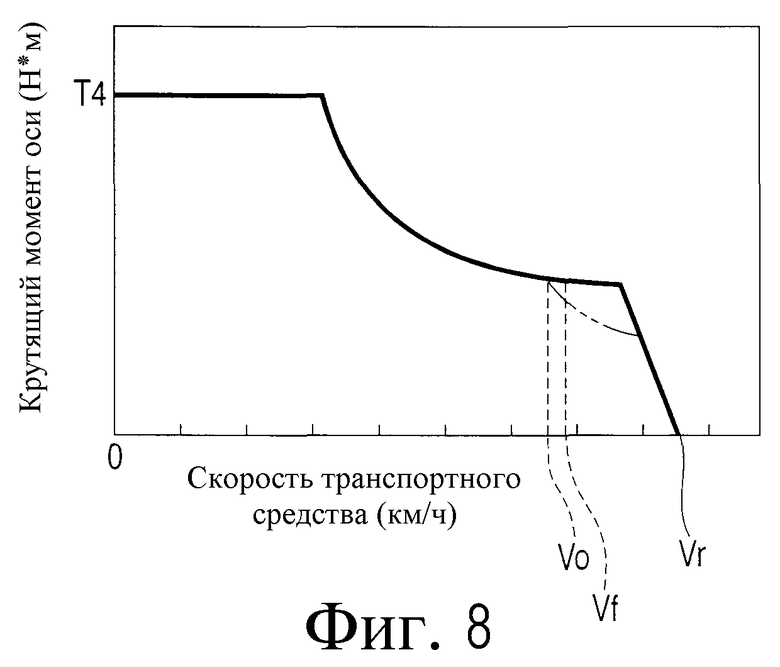
Далее будет описана работа транспортного средства 10. На фиг. 8 показан график, представляющий взаимосвязь между скоростью транспортного средства для транспортного средства 10 и суммарным крутящим моментом, действующим на ось 44 передних колес, и крутящим моментом, действующим на ось 54 задних колес. Другими словами, на фиг. 8 показана взаимосвязь между скоростью транспортного средства и крутящими моментами, действующими на транспортное средство 10. На фиг. 8, на горизонтальной оси представлена скорость транспортного средства для транспортного средства 10. Здесь отмечены единицы км/ч. Направление вправо на графике выражает увеличение скорости транспортного средства. На фиг. 8, на вертикальной оси представлен суммарный крутящий момент, действующий на ось 44 передних колес, и крутящий момент, действующий на ось 54 задних колес. Отмечены единицы Н*м. Направление вверх вдоль вертикальной оси на графике выражает увеличение крутящего момента.
Как показано на фиг. 8, передний электродвигатель 41 и задний электродвигатель 51 вращаются до тех пор, пока скорость транспортного средства для транспортного средства 10 не превысит скорость Vo в час, начиная от которой крутящий момент переднего электродвигателя 41 резко падает. В это время контроллер 85 двигателя выводит механизм 92 сцепления в разъединенное состояние. Вращение переднего электродвигателя 41, поэтому, не передается на двигатель 81. Даже, когда двигатель 81 приводят во вращение для электрического заряда аккумуляторной батареи 60, вращение двигателя 81 не передается на передние колеса 11.
Когда скорость Vo в час, начиная от которой крутящий момент переднего электродвигателя 41 резко падает, будет превышена, контроллер 30 транспортного средства передает сигнал для прекращения подачи электроэнергии в передний электродвигатель 41 для прекращения привода в движение от переднего электродвигателя 41. Обратный преобразователь переднего электродвигателя 45 принимает сигнал из контроллера 30 транспортного средства и затем останавливает подачу в передний электродвигатель 41 трехфазного переменного тока.
Затем, когда скорость транспортного средства превышает скорость Vo в час, контроллер 30 транспортного средства передает сигнал для привода двигателя 81. Контроллер 85 двигателя принимает сигнал из контроллера 30 транспортного средства, и затем выполняет привод двигателя 81. Когда двигатель 81 приводят в движение, контроллер 100 механизма включения сцепления затем устанавливает механизм 92 сцепления в соединенное состояние. Вращение выходного вала 81a двигателя 81, таким образом, передается на передние колеса 11 с помощью механизма 42 передачи на передние колеса, и передние колеса 11, поэтому, вращаются.
Как показано на фиг. 8, крутящий момент, который воздействует на передние колеса 11, принимает значения, которые формируют плавную непрерывную кривую крутящего момента. Эта особенность будет, в частности, описана ниже. На фиг. 8, кривая крутящего момента, в случае, когда крутящий момент двигателя 81 не действует на передние колеса 11, будет представлен, как пунктирная линия с двумя точками. Случай, когда крутящий момент двигателя 81 не действует на передние колеса 11, является тем же, что и кривая крутящего момента, показанная на фиг. 6, используемая в первом варианте осуществления.
Как обозначено пунктирной линией с двумя точками, в случае, когда крутящий момент двигателя 81 не действует на передние колеса 11, крутящий момент, действующий на транспортное средство 10, резко падает, когда скорость Vo в час, начиная с которой крутящий момент переднего электродвигателя 41 резко падает, будет превышен. В настоящем варианте осуществления, крутящий момент двигателя 81 действует таким образом, что не происходит такое резкое понижение крутящего момента, что делает кривую крутящего момента плавной. Другими словами, двигатель 81 осуществляет привод таким образом, что он не подает такой крутящий момент, который делает кривую крутящего момента плавной.
Когда скорость транспортного средства 10 становится не больше, чем скорость Vo в час, контроллер 30 транспортного средства прекращает привод двигателя 81 и передает сигнал на начало привода передних колес 11 от переднего электродвигателя 41.
Контроллер 85 двигателя принимает сигнал и прекращает привод от двигателя 81, и контроллер 100 механизма сцепления переводит механизм 92 сцепления в разъединенное состояние. Обратный преобразователь 45 переднего электродвигателя начинает подачу трехфазного переменного тока, для привода переднего электродвигателя 41.
Также, в настоящем варианте осуществления, работа в случае электрического заряда аккумуляторной батареи 60 является той же, что и в первом варианте осуществления.
В настоящем варианте осуществления могут быть достигнуты те же эффекты, что и в первом варианте осуществления, и может быть ограничено резкое падение крутящего момента, воздействующего на транспортное средство 10.
Редуктор 90 скорости двигателя имеет структуру, в которой коэффициент уменьшения скорости является постоянным.
Поэтому структура редуктора 90 скорости двигателя может быть упрощена, и он может быть выполнен меньшим. Кроме того, редуктор 90 скорости двигателя предусмотрен на переднем участке 13, и поэтому степень свободы компоновки переднего участка 13 может быть улучшена.
Во втором варианте осуществления, когда скорость транспортного средства превышает скорость, начиная с которой крутящий момент переднего электродвигателя 41 резко падает, двигатель 81 приводят во вращение, вместо переднего электродвигателя 41, и им управляют так, чтобы сделать кривую крутящего момента транспортного средства 10 плавной. Скорость Vo в час, начиная с которой резко падает крутящий момент, находится рядом со скоростью Vf в час, как скорость транспортного средства, соответствующая максимальной частоте вращения переднего электродвигателя 41. Таким образом, перевод механизма 92 сцепления в соединенное состояние и привод во вращение 81 одновременно, на скорости Vo в час, начиная с которой резко падает крутящий момент, представляют собой примеры зацепления элемента фрикционного соединения рядом со скоростью транспортного средства, соответствующей максимальной частоте вращения первого приводного электродвигателя и передачи силы привода двигателя в одно из переднего и заднего колес, используя контроллер элемента фрикционного соединения, как упомянуто в изобретении.
Однако, вариант осуществления не ограничен этим. Например, когда скорость транспортного средства превышает скорость Vo в час, передний электродвигатель 41 может быть приведен во вращение. В этом случае, начиная от скорости Vo в час до скорости Vf в час (включая в себя Vf), передние колеса 11 транспортного средства 10 приводят во вращение передний электродвигатель 41 и двигатель 81. Двигателем 81 управляют таким образом, чтобы скорость вращения диска 93 сцепления была равна скорости вращения переднего электродвигателя 41 и чтобы кривая крутящего момента транспортного средства 10 была плавной.
В качестве альтернативы, когда скорость транспортного средства достигает скорости Vf в час, соответствующей максимальной скорости вращения переднего электродвигателя 41, двигатель 81 может быть приведен во вращение, и механизм 92 сцепления может быть переведен в соединенное состояние.
В настоящем варианте выполнения передние колеса 11 используются, как пример одного из передних колес, как упомянуто в изобретении, и задние колеса 12 используются, как пример другого из переднего и заднего колес, как упомянуто в изобретении. Передний электродвигатель 41 используется как пример первого приводного электродвигателя, как упомянуто в изобретении, и задний электродвигатель 51 используется как пример второго приводного электродвигателя, как упомянуто в изобретении.
Однако, даже в другой конструкции, уменьшение веса и снижение стоимости могут быть достигнуты при поддержании возможности движения даже в диапазоне движения с высокими скоростями. Например, задние колеса 12 могут представлять собой другой пример одного из переднего и заднего колес, как упомянуто в изобретении, и задний электродвигатель 51 может использоваться, как другой пример первого приводного электродвигателя. Передние колеса 11 могут представлять собой другой пример вторых колес, каждое из которых упомянуто в изобретении, и передний электродвигатель 41 может использоваться, как другой пример второго приводного электродвигателя. В этом случае задний электродвигатель 51 может быть выполнен более малым, и поэтому степень свободы компоновки заднего участка 14 транспортного средства 10 может быть улучшена.
Изобретение не является точно ограниченным представленными выше вариантами осуществления, но может быть воплощено с модифицируемыми его компонентами, в пределах диапазона, не выходящего за пределы предмета изобретения в практических фазах. Различные изобретения могут быть выведены из соответствующих комбинаций множества компонентов, раскрытых в предшествующих вариантах осуществления. Например, несколько компонентов могут быть удалены из всех компонентов, раскрытых в представленных выше вариантах осуществления. Кроме того, компоненты могут быть соответствующим образом скомбинированы среди разных вариантов осуществления.
Список ссылочных позиций
10 - Транспортное средство (транспортное средство c приводом на передние и задние колеса), 11 - Переднее колесо (одно из переднего и заднего колес), 12 - Заднее колесо (второе колесо), 41 - Передний электродвигатель (первый приводной электродвигатель), 43 - Редуктор скорости переднего колеса (первый редуктор скорости), 51 - Задний электродвигатель (второй приводной электродвигатель), 53 - Редуктор скорости заднего колеса (второй приводной электродвигатель), 81 - Двигатель, 92 - Механизм сцепления (элемент фрикционного соединения), 100 - Контроллер механизма сцепления (контроллер элемента фрикционного соединения).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2671115C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2013 |
|
RU2623284C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2615083C1 |
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2721861C1 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2492068C1 |
| СИСТЕМА ПОДАЧИ МОЩНОСТИ ДВИГАТЕЛЯ С УСТРОЙСТВОМ ОБХОДА ЗУБЧАТОЙ ПЕРЕДАЧИ ТРАНСМИССИИ | 2019 |
|
RU2763799C2 |
| КОНТРОЛЛЕР ДЛЯ ГИБРИДНОЙ СИСТЕМЫ | 2020 |
|
RU2754594C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА, СНАБЖЕННОГО СУПЕРКОНДЕНСАТОРНОЙ ИЛИ ИОНИСТОРНОЙ БАТАРЕЕЙ | 2018 |
|
RU2704459C1 |
| СИСТЕМА ПРИВОДА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2531540C2 |
Изобретение относится к транспортному средству с приводом на передние и задние колеса. Транспортное средство содержит первый и второй приводные электродвигатели, первый и второй редукторы скорости. Первый редуктор скорости уменьшает скорость вращения первого приводного электродвигателя. Второй редуктор скорости уменьшает скорость вращения второго приводного электродвигателя с коэффициентом уменьшения скорости, меньшим, чем коэффициент уменьшения скорости первого редуктора скорости. Коэффициенты уменьшения скорости первого и второго редукторов установлены таким образом, чтобы максимальная частота вращения других из передних и задних колес, была больше, чем максимальная скорость вращения одних из передних и задних колес. Технический результат заключается в снижении массогабаритных показателей привода. 3 з.п. ф-лы, 8 ил.
1. Транспортное средство с приводом на передние и задние колеса, который приводит в движение передние и задние колеса, отличающееся тем, что содержит первый приводной электродвигатель, который осуществляет привод одних из передних и задних колес, второй приводной электродвигатель, который осуществляет привод других из передних и задних колес и имеет максимальный крутящий момент, больший, чем максимальный крутящий момент первого приводного электродвигателя, и максимальная частота вращения первого приводного электродвигателя больше, чем максимальная частота вращения второго приводного электродвигателя, первый редуктор скорости, который уменьшает скорость вращения первого приводного электродвигателя и передает уменьшенное вращение на одни из передних и задних колес, второй редуктор скорости, который уменьшает скорость вращения второго приводного электродвигателя с коэффициентом уменьшения скорости, меньшим, чем коэффициент уменьшения скорости первого редуктора скорости, и передает уменьшенную скорость вращения на другие из передних и задних колес, в котором коэффициенты уменьшения скорости первого и второго редукторов скоростей установлены таким образом, чтобы максимальная частота вращения других из передних и задних колес, соответствующая максимальной скорости вращения второго приводного электродвигателя, была больше, чем максимальная скорость вращения одних из передних и задних колес, соответствующих максимальной скорости вращения первого приводного электродвигателя.
2. Транспортное средство по п.1, отличающееся тем, что содержит электродвигатель, который осуществляет привод одних из передних и задних колес, элемент фрикционного соединения, который передает и прерывает подачу мощности от электродвигателя в одни из передних и задних колес, и контроллер элемента фрикционного соединения, который управляет элементом фрикционного соединения, в котором контроллер элемента фрикционного соединения обеспечивает соединение элемента фрикционного соединения, приблизительно при скорости транспортного средства, соответствующей максимальной частоте вращения первого приводного электродвигателя, и передает, таким образом, силу привода двигателя на одни из передних и задних колес.
3. Транспортное средство по п.2, отличающееся тем, что вращение электродвигателя передают в одни из передних и задних колес с помощью редуктора скорости, имеющего фиксированное передаточное число.
4. Транспортное средство по любому из пп.1-3, отличающееся тем, что одно из передних и задних колес представляет собой переднее колесо транспортного средства, и другое из передних и задних колес представляет собой заднее колесо транспортного средства.
| EP 0622264 A2, 02.11.1994 | |||
| JP 2009142036 A, 25.06.2009 | |||
| US 2003183431 A1, 02.10.2003 | |||
| US 2009088914 A1, 02.04.2009 | |||
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |

