Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для электрического транспортного средства с приводом на четыре колеса, в котором источник приведения в движение имеет электромотор-генератор, и сцепление с электронным управлением предоставляется в тракте передачи мощности приведения в движение, идущем от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне.
Уровень техники
[0002] Традиционно известна 4WD-система, содержащая сцепление с электронным управлением на тракте передачи мощности приведения в движение от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) № 2003-327000
Сущность изобретения
Задача, решаемая изобретением
[0004] Тем не менее, в вышеописанной 4WD-системе, имеется проблема в том, что в случае электрического транспортного средства, содержащего электромотор-генератор в качестве источника приведения в движение, если рекуперативное торможение выполняется с использованием электромотора-генератора, может возникать толчок вследствие флуктуации в передаваемом крутящем моменте.
Иными словами, если рекуперативное управление вмешивается в состоянии, в котором возникает остаточный крутящий момент за счет крутящего момента приведения в движение в сцеплении с электронным управлением, когда нажимается тормоз после операции отпускания педали акселератора, крутящий момент при движении по инерции (крутящий момент в обратном направлении относительно крутящего момента приведения в движение) вводится в сцепление с электронным управлением, и возникает флуктуация крутящего момента.
[0005] С учетом проблемы, описанной выше, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления для электрического транспортного средства с приводом на четыре колеса, которое позволяет предотвращать возникновение толчка вследствие вмешательства рекуперативного управления в состоянии с приводом на четыре колеса.
Средство, используемое для решения задачи
[0006] Чтобы достигать цели, описанной выше, настоящее изобретение содержит, в источнике приведения в движение, электромотор-генератор и содержит сцепление с электронным управлением на тракте передачи мощности приведения в движение от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне.
Это устройство управления для электрического транспортного средства с приводом на четыре колеса содержит средство управления распределением мощности привода на четыре колеса, которое выводит в сцепление с электронным управлением значение команды управления передаваемым крутящим моментом, чтобы приводить к состоянию с приводом на четыре колеса, в соответствии с состоянием транспортного средства.
Средство управления распределением мощности привода на четыре колеса имеет контроллер координирования вмешательства рекуперативного управления, который, когда рекуперативное управление посредством электромотора-генератора вмешивается во время состояния с приводом на четыре колеса, доводит передаваемый крутящий момент сцепления с электронным управлением до нуля перед инициированием рекуперативного управления.
Преимущества изобретения
[0007] Таким образом, когда рекуперативное управление посредством электромотора-генератора вмешивается во время состояния с приводом на четыре колеса, выполняется совместное управление, чтобы доводить передаваемый крутящий момент сцепления с электронным управлением до нуля.
Иными словами, остаточный крутящий момент сцепления с электронным управлением (крутящий момент приведения в движение) становится нулевым до того, как крутящий момент при движении по инерции, возникающий вследствие вмешательства рекуперативного управления, вводится в сцепление с электронным управлением. Соответственно, передача крутящего момента сцепления с электронным управлением подавляется, даже если рекуперативное управление вмешивается.
Как результат, можно предотвращать возникновение толчка вследствие вмешательства рекуперативного управления при работе в состоянии с приводом на четыре колеса.
Краткое описание чертежей
[0008] Фиг. 1 является общим системным видом, иллюстрирующим гибридное транспортное средство с базовым приводом на четыре колеса FF-типа (один пример электрического транспортного средства с приводом на четыре колеса), к которому применяется устройство управления первого варианта осуществления.
Фиг. 2 является схематичным видом, иллюстрирующим сцепление с электронным управлением, которое предоставляется в системе привода на задние колеса гибридного транспортного средства с приводом на четыре колеса, к которой применяется устройство управления первого варианта осуществления.
Фиг. 3 является видом в перспективе, иллюстрирующим кулачковый механизм сцепления с электронным управлением.
Фиг. 4 является блок-схемой, иллюстрирующей систему управления распределением мощности привода на четыре колеса, имеющую контроллер координирования вмешательства рекуперативного управления в модуле 4WD-управления первого варианта осуществления.
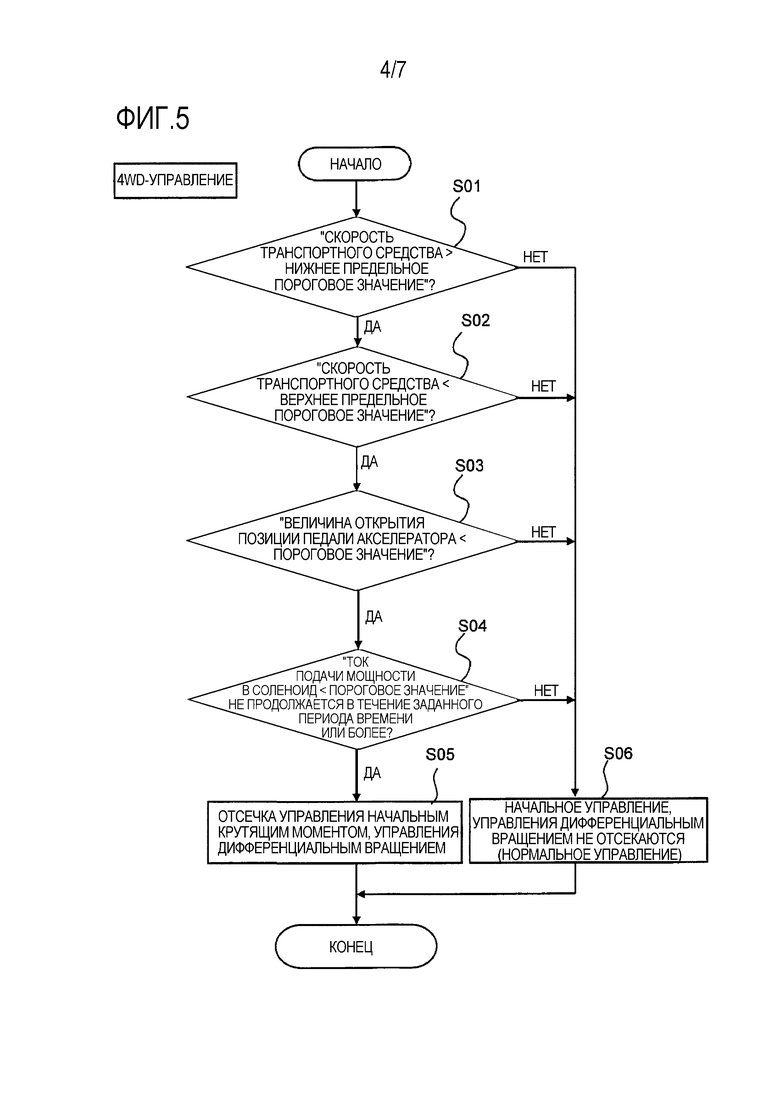
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций этапов прогнозирующего определения вмешательства рекуперативного управления, которые выполняются в блоке прогнозирующего определения вмешательства рекуперативного управления контроллера координирования вмешательства рекуперативного управления.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций этапов ожидания начала рекуперативного управления согласно запросу на запрещение рекуперативного управления, из видов рекуперативного управления, которые выполняются посредством гибридного модуля управления первого варианта осуществления.
Фиг. 7 является пояснительным видом, иллюстрирующим механизм формирования толчка/анормального шума, которые формируются в кулачковом механизме сцепления с электронным управлением, когда нажимается тормоз после операции отпускания педали акселератора.
Фиг. 8 является временной диаграммой, иллюстрирующей каждую характеристику из вертикального G сцепления/рекуперативного крутящего момента/командуемого крутящего 4WD-момента/фактического крутящего момента/тока сцепления/скорости транспортного средства/тормоза/акселератора, во время вмешательства рекуперативного управления, когда нажимается тормоз после операции отпускания педали акселератора, в сравнительном примере.
Фиг. 9 является временной диаграммой, иллюстрирующей каждую характеристику из вертикального G сцепления/рекуперативного крутящего момента/командуемого крутящего 4WD-момента/фактического крутящего момента/тока сцепления/скорости транспортного средства/тормоза/акселератора, во время вмешательства рекуперативного управления, когда нажимается тормоз после операции отпускания педали акселератора, в первом варианте осуществления.
Варианты осуществления изобретения
[0009] Ниже описывается предпочтительный вариант осуществления для реализации устройства управления для электрического транспортного средства с приводом на четыре колеса настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация.
Ниже отдельно описываются "общая конфигурация системы", "подробная конфигурация сцепления с электронным управлением" и "управление координированием вмешательства рекуперативного управления" относительно конфигурации гибридного транспортного средства с базовым приводом на четыре колеса FF-типа (одного примера электрического транспортного средства с приводом на четыре колеса), к которому применяется устройство управления первого варианта осуществления.
[0011] Общая конфигурация системы
Фиг. 1 иллюстрирует полную систему гибридного транспортного средства с базовым приводом на четыре колеса FF-типа.
Ниже описывается общая конфигурация системы гибридного транспортного средства с базовым приводом на четыре колеса FF-типа на основе фиг. 1.
[0012] Система привода на передние колеса гибридного транспортного средства с базовым приводом на четыре колеса FF-типа содержит стартерный электромотор 1, поперечно расположенный двигатель 2, первую муфту 3 (сокращенно "CL1"), электромотор-генератор 4 (сокращенно "MG"), вторую муфту 5 (сокращенно "CL2") и ременную бесступенчатую трансмиссию 6 (сокращенно "CVT"), как проиллюстрировано на фиг. 1. Выходной вал ременной бесступенчатой трансмиссии 6 соединяется с возможностью приведения в движение с левым и правым передними колесами 10R, 10L, через конечную редукторную передачу 7, дифференциал 8 и левый и правый ведущие валы 9R, 9L.
[0013] Стартерный электромотор 1 представляет собой стартер, имеющий шестерню, которая вводится в зацепление с шестерней запуска двигателя, предоставленной для коленчатого вала поперечно расположенного двигателя 2, и которая вращательно приводит в действие коленчатый вал во время запуска двигателя. Этот стартерный электромотор 1 приводится в действие с помощью 12-вольтового аккумулятора 22 в качестве источника мощности.
[0014] Поперечно расположенный двигатель 2 представляет собой двигатель, расположенный в переднем отсеке с направлением коленчатого вала в качестве направления ширины транспортного средства, содержащий электрический водяной насос 12 и датчик 13 вращения коленчатого вала, который определяет обратное вращение поперечно расположенного двигателя 2.
[0015] Первая муфта 3 представляет собой нормально открытую сухую многодисковую фрикционную муфту с гидравлическим приводом, которая размещается между поперечно расположенным двигателем 2 и электромотором-генератором 4, при этом полное зацепление/зацепление в состоянии проскальзывания/расцепление управляются посредством гидравлического давления первой муфты.
[0016] Электромотор-генератор 4 представляет собой синхронный электромотор с постоянными магнитами трехфазного переменного тока, который соединяется с поперечно расположенным двигателем 2 через первую муфту 3. Этот электромотор-генератор 4 использует аккумулятор 21 с высоким уровнем мощности, описанный ниже, в качестве источника мощности, и инвертор 26, который преобразует постоянный ток в трехфазный переменный ток во время подачи мощности и преобразует трехфазный переменный ток в постоянный ток во время рекуперации, соединяется с обмоткой статора через жгут 27 проводов переменного тока.
[0017] Вторая муфта 5 представляет собой нормально открытую сухую многодисковую фрикционную муфту с гидравлическим приводом, которая размещается между электромотором-генератором 4 и левым и правым передними колесами 10R, 10L, которые представляют собой ведущие колеса, при этом полное зацепление/зацепление в состоянии проскальзывания/расцепление управляются посредством гидравлического давления второй муфты. Вторая муфта 5 первого варианта осуществления сконфигурирована посредством отведения муфты 5a переднего хода и тормоза 5b заднего хода, предоставленных для механизма переключения переднего/заднего хода ременной бесступенчатой трансмиссии 6, сконфигурированной посредством шестерни планетарной передачи. Иными словами, муфта 5a переднего хода используется в качестве второй муфты 5 во время переднего хода, и тормоз 5b заднего хода используется в качестве второй муфты 5 во время заднего хода.
[0018] Ременная бесступенчатая трансмиссия 6 представляет собой трансмиссию, которая достигает бесступенчатого передаточного отношения посредством изменения диаметра намотки ремня посредством приложения гидравлического давления смещения к первичной масляной камере и вторичной масляной камере. Эта ременная бесступенчатая трансмиссия 6 содержит главный масляный насос 14 (механический привод), вспомогательный масляный насос 15 (привод электромотора) и непроиллюстрированный регулирующий клапанный блок, который формирует гидравлическое давление первой и второй муфты и гидравлическое давление переключения передач, с использованием давления PL в магистрали, сформированного посредством регулирования давления на выходе из насоса из главного масляного насоса 14 в качестве исходного давления. Главный масляный насос 14 вращательно приводится в действие посредством вала электромотора для электромотора-генератора 4 (входного трансмиссионного вала). Вспомогательный масляный насос 15 в основном используется в качестве вспомогательного насоса для формирования смазочного и охлаждающего масла.
[0019] Приводная система с одним электромотором и двумя муфтами сконфигурирована посредством первой муфты 3, электромотора-генератора 4 и второй муфты 5, и эта приводная система содержит "EV-режим" и "HEV-режим" в качестве основных режимов приведения в движение. "EV-режим" представляет собой режим электрического транспортного средства, в котором первая муфта 3 расцепляется, и вторая муфта 5 зацепляется, и в котором электромотор-генератор 4 представляет собой единственный источник приведения в движение; движение посредством этого "EV-режима" упоминается в качестве "EV-движения". "HEV-режим" представляет собой режим гибридного транспортного средства, в котором первая и вторая муфты 3, 5 зацепляются, и в котором поперечно расположенный двигатель 2 и электромотор-генератор 4 представляют собой источники приведения в движение; движение посредством этого "HEV-режима" упоминается в качестве "HEV-движения".
[0020] Совместный рекуперативный тормозной блок 16 на фиг. 1 представляет собой устройство, которое управляет полным тормозным крутящим моментом, согласно такому факту, что работа в рекуперативном режиме выполняется в принципе во время операции нажатия педали тормоза. Этот совместный рекуперативный тормозной блок 16 содержит педаль тормоза, усилитель отрицательного давления, который использует отрицательное давление на впуске поперечно расположенного двигателя 2, и главный цилиндр. Затем во время операции нажатия педали тормоза, блок выполняет совместное управление величиной рекуперации/величиной давления жидкости, так что величина, полученная посредством вычитания рекуперативной тормозной силы из запрашиваемой тормозной силы на основе рабочей величины нажатия педали, выделена гидравлической тормозной силе.
[0021] Система привода на передние колеса гибридного транспортного средства с базовым приводом на четыре колеса FF-типа содержит раздаточную коробку 40, карданный вал 41, сцепление 42 с электронным управлением, главную передачу 43, ведущие валы 44R, 44L левого и правого задних колес и левое и правое задние колеса 11R, 11L, как проиллюстрировано на фиг. 1.
[0022] Когда сцепление 42 с электронным управлением зацепляется, раздаточная коробка 40 передает крутящий момент приведения в движение из дифференциала 8 на задние колеса 11R, 11L через карданный вал 41, сцепление 42 с электронным управлением, главную передачу 43 и ведущие валы 44R, 44L левого и правого задних колес. Ниже описывается подробная конфигурация сцепления 42 с электронным управлением.
[0023] Система электропитания гибридного транспортного средства FF-типа содержит аккумулятор 21 с высоким уровнем мощности в качестве источника мощности электромотора-генератора и 12-вольтовый аккумулятор 22 в качестве источника мощности 12-вольтовой системной нагрузки, как проиллюстрировано на фиг. 1.
[0024] Аккумулятор 21 с высоким уровнем мощности представляет собой аккумуляторную батарею, смонтированную в качестве источника мощности электромотора-генератора 4, и, например, для этого используется литий-ионный аккумулятор, в котором модуль гальванических элементов, сконфигурированный из определенного числа гальванических элементов, задается в кожухе аккумуляторного источника мощности. Распределительная коробка, которая агрегирует релейную схему для выполнения подачи/отсечки/распределения сильного тока, встроена в этот аккумулятор 21 с высоким уровнем мощности, и к нему дополнительно присоединены охлаждающий вентиляторный блок 24, имеющий функцию охлаждения аккумулятора, и контроллер 86 литиевого аккумулятора, который отслеживает зарядную емкость аккумулятора (SOC аккумулятора) и температуру аккумулятора.
[0025] Аккумулятор 21 с высоким уровнем мощности и электромотор-генератор 4 соединяются со жгутом 25 проводов постоянного тока и инвертором 26 через жгут 27 проводов переменного тока. Контроллер 83 электромотора для выполнения управления подачей мощности/рекуперацией присоединяется к инвертору 26. Иными словами, инвертор 26 преобразует постоянный ток из жгута 25 проводов постоянного тока в трехфазный переменный ток в жгут 27 проводов переменного тока во время подачи мощности, когда электромотор-генератор 4 приводится в действие посредством разряда аккумулятора 21 с высоким уровнем мощности. Помимо этого, инвертор преобразует трехфазный переменный ток из жгута 27 проводов переменного тока в постоянный ток в жгут 25 проводов постоянного тока, во время рекуперации для заряда аккумулятора 21 с высоким уровнем мощности с выработкой электрической мощности посредством электромотора-генератора 4.
[0026] 12-вольтовый аккумулятор 22 представляет собой аккумуляторную батарею, смонтированную в качестве источника мощности 12-вольтовой системной нагрузки, которая представляет собой вспомогательное оборудование; например, используется свинцовый аккумулятор, смонтированный на транспортном средстве с двигателем и т.п. Аккумулятор 21 с высоким уровнем мощности и 12-вольтовый аккумулятор 22 соединяются через жгут 25a проводов ветви постоянного тока, преобразователь 37 постоянного тока и жгут 38 проводов аккумулятора. Преобразователь 37 постоянного тока служит для преобразования нескольких сотен вольт из аккумулятора 21 с высоким уровнем мощности в 12 В, который сконфигурирован так, чтобы управлять величиной заряда 12-вольтового аккумулятора 22 посредством управления этим преобразователем 37 постоянного тока с помощью гибридного модуля 81 управления.
[0027] Система управления гибридным транспортным средством FF-типа содержит гибридный модуль 81 управления (сокращенно: "HCM") в качестве интегрированного средства управления, имеющего функцию для того, чтобы надлежащим образом управлять энергопотреблением всего транспортного средства, как проиллюстрировано на фиг. 1. Модуль 82 управления двигателем (сокращенно: "ECM"), контроллер 83 электромотора (сокращенно: "MC"), модуль 84 CVT-управления (сокращенно: "CVTCU"), модуль 85 4WD-управления (сокращенно: "4WDCU") и контроллер 86 литиевого аккумулятора (сокращенно: "LBC") предоставляются в качестве средств управления, которые соединяются с этим гибридным модулем 81 управления. Эти средства управления, включающие в себя гибридный модуль 81 управления, соединяются таким образом, чтобы допускать обмен двунаправленной информацией посредством линии 90 CAN-связи (CAN является сокращением для "контроллерной сети").
[0028] Гибридный модуль 81 управления выполняет различные виды управления на основе входной информации из каждого из средства управления, переключателя 91 зажигания, датчика 92 величины открытия позиции педали акселератора, датчика 93 скорости транспортного средства и т.п. Модуль 82 управления двигателем выполняет управление впрыском топлива, управление зажиганием, управление отсечкой топлива и т.п. поперечно расположенного двигателя 2. Контроллер 83 электромотора выполняет управление подачей мощности, рекуперативное управление и т.п. электромотора-генератора 4 посредством инвертора 26. Модуль 84 CVT-управления выполняет управление гидравлическим давлением для зацепления первой муфты 3, управление гидравлическим давлением для зацепления второй муфты 5, управление гидравлическим давлением смещения ременной бесступенчатой трансмиссией 6 и т.п. Контроллер 86 литиевого аккумулятора управляет SOC аккумулятора, температурой аккумулятора и т.п. для аккумулятора 21 с высоким уровнем мощности.
[0029] Модуль 85 4WD-управления принимает сигналы из переключателя 94 4WD-режима, датчика 95 скорости вращения колес, датчика 96 угла поворота при рулении, датчика 97 скорости относительно вертикальной оси, G-датчика 98, тормозного переключателя 99 и т.п. Затем модуль управления выводит значение команды управления передаваемым крутящим моментом в сцепление 42 с электронным управлением после выполнения предварительно определенных этапов вычисления. Например, когда автоматический (AUTO) выбирается в переключателе 94 4WD-режима, модуль управления выбирает конечный командуемый крутящий момент из числа этапов вычисления начального крутящего момента, этапов вычисления крутящего момента дифференциального вращения и этапов вычисления крутящего момента распределения движущей силы посредством выбора высокого уровня и управляет распределением движущей силы на передние колеса 10R, 10L и задние колеса 11R, 11L. Коэффициент распределения движущей силы, который должен управляться, является бесступенчатым коэффициентом распределения, в котором (коэффициент распределения на передние колеса:коэффициент распределения на задние колеса) получается из (100%:0%, привод на передние колеса) – (50%:50%, привод с распределением на четыре колеса и т.д.,).
[0030] Подробная конфигурация сцепления с электронным управлением
Фиг. 2 является схематичным видом, иллюстрирующим сцепление 42 с электронным управлением, и фиг. 3 является видом в перспективе, иллюстрирующим кулачковый механизм сцепления 42 с электронным управлением. Ниже описывается подробная конфигурация сцепления 42 с электронным управлением на основе фиг. 2 и фиг. 3.
[0031] Сцепление 42 с электронным управлением содержит соленоид 45, входной вал 46 сцепления, выходной вал 47 сцепления, корпус 48 муфты, якорь 49, муфту 50 управления, кулачок 51 управления, главный кулачок 52, шарик 53, главную муфту 54 и паз 55 кулачка, как проиллюстрировано на фиг. 2 и фиг. 3.
[0032] Один конец входного вала 46 сцепления соединяется с карданным валом 41, а другой конец прикрепляется к корпусу 48 муфты. Выходной вал 47 сцепления прикрепляется к входной шестерне главной передачи 43.
[0033] Муфта 50 управления представляет собой муфту, которая размещается между корпусом 48 муфты и кулачком 51 управления. Главная муфта 54 представляет собой муфту, которая размещается между корпусом 48 муфты и выходным валом 47 сцепления.
[0034] Кулачковый механизм сконфигурирован из кулачка 51 управления, главного кулачка 52 и шарика 53, размещенного посередине между пазами 55, 55 кулачка, сформированными в двух кулачках 51, 52, как проиллюстрировано на фиг. 3.
[0035] Здесь, описывается операция зацепления сцепления 42 с электронным управлением. Во-первых, когда ток прикладывается к соленоиду 45 посредством команды из модуля 85 4WD-управления, вокруг соленоида 45 формируется магнитное поле, которое притягивает якорь 49 к стороне муфты 50 управления. Момент трения формируется в муфте 50 управления за счет прижатия посредством этого притягиваемого якоря 49, и момент трения, который формируется в муфте 50 управления, передается в кулачок 51 управления кулачкового механизма. Крутящий момент, который передается в кулачок 51 управления, усиливается/преобразуется в крутящий момент в осевом направлении через пазы 55, 55 кулачка и шарик 53 и прижимает главный кулачок 52 в направлении вперед. Главный кулачок 52 прижимает главную муфту 54, и момент трения, пропорциональный значению тока, формируется в главной муфте 54. Крутящий момент, который формируется в главной муфте 54, проходит выходной вал 47 сцепления и передается в главную передачу 43 в качестве крутящего момента приведения в движение.
[0036] Подробная конфигурация управления координированием вмешательства рекуперативного управления
Фиг. 4 является блок-схемой, иллюстрирующей систему управления распределением мощности привода на четыре колеса, имеющую контроллер координирования вмешательства рекуперативного управления в модуле 85 4WD-управления. Ниже описывается конфигурация системы управления распределением мощности привода на четыре колеса, имеющей контроллер координирования вмешательства рекуперативного управления, на основе фиг. 4.
[0037] Система управления распределением мощности привода на четыре колеса содержит процессор B01 начального крутящего момента на основе скорости транспортного средства, процессор B02 крутящего момента дифференциального вращения на основе дифференциального вращения между передней и задней частью и процессор B03 крутящего момента распределения движущей силы на основе величины открытия позиции педали акселератора и движущей силы, как проиллюстрировано посредством блока со сплошной линией на фиг. 4. Затем предоставляется секция B04 выбора конечного командуемого крутящего момента, которая выбирает из крутящих моментов из процессоров B01, B02, B03 посредством выбора высокого уровня. Дополнительно предусмотрены секция B06 ограничения темпа изменения при уменьшении конечного командуемого крутящего момента, которая ограничивает темп изменения при уменьшении выбранного конечного командуемого крутящего момента на основе блока B05 вычисления (низкого градиента) в нормальное время, и блок B07 задания конечного командуемого крутящего момента, который задает крутящий момент с ограниченным темпом изменения при уменьшении в качестве конечного командуемого крутящего момента.
[0038] Контроллер координирования вмешательства рекуперативного управления содержит блок B08 прогнозирующего определения вмешательства рекуперативного управления, блок B09 переключения крутящего момента, блок B10 вычисления (высокого градиента) во время определения управления и блок B11 переключения градиента, как проиллюстрировано посредством пунктирного блока на фиг. 4.
[0039] Блок B08 прогнозирующего определения вмешательства рекуперативного управления принимает величину открытия позиции педали акселератора, скорость транспортного средства и значение соленоидного тока и выводит сигнал прогнозирующего определения вмешательства рекуперативного управления, когда скорость транспортного средства находится в области рекуперативных скоростей транспортного средства, величина открытия позиции педали акселератора составляет пороговое значение или ниже, и ток подачи мощности в соленоид поддерживается меньшим порогового значения в течение заданного периода времени (фиг. 5).
[0040] При приеме сигнала прогнозирующего определения вмешательства рекуперативного управления из блока B08 прогнозирующего определения вмешательства рекуперативного управления блок B09 переключения крутящего момента задает крутящий момент из процессора B01 начального крутящего момента равным нулю (отсекает) и задает крутящий момент из процессора B02 крутящего момента дифференциального вращения равным нулю (отсекает).
[0041] При приеме сигнала прогнозирующего определения вмешательства рекуперативного управления из блока B08 прогнозирующего определения вмешательства рекуперативного управления, блок B11 переключения градиента переключается с градиента уменьшения (низкого градиента) в нормальное время из блока B05 вычисления (низкого градиента) в нормальное время на градиент уменьшения (высокий градиент) во время определения управления из блока B10 вычисления (высокого градиента) во время определения управления.
[0042] Фиг. 5 иллюстрирует последовательность операций этапов прогнозирующего определения вмешательства рекуперативного управления, которые выполняются в блоке B08 прогнозирующего определения вмешательства рекуперативного управления модуля 85 4WD-управления. Ниже описывается каждый этап на фиг. 5.
[0043] На этапе S01, определяется то, превышает или нет скорость транспортного средства нижнее предельное пороговое значение для выполнения рекуперации во время операции нажатия педали тормоза. Если "Да" ("скорость транспортного средства > нижнее предельное пороговое значение"), этапы переходят к этапу S02, а если "Нет" ("скорость транспортного средства < нижнее предельное пороговое значение"), этапы переходят к этапу S06.
[0044] На этапе S02, после определения того, что "скорость транспортного средства > нижнее предельное пороговое значение", на этапе S01, определяется то, меньше или нет скорость транспортного средства верхнего предельного порогового значения для выполнения рекуперации во время операции нажатия педали тормоза. Если "Да" ("скорость транспортного средства < верхнее предельное пороговое значение"), этапы переходят к этапу S03, а если "Нет" ("скорость транспортного средства > верхнее предельное пороговое значение"), этапы переходят к этапу S06.
[0045] На этапе S03, после определения того, что "скорость транспортного средства < верхнее предельное пороговое значение", на этапе S02, определяется то, меньше или нет величина открытия позиции педали акселератора порогового значения. Если "Да" ("величина открытия позиции педали акселератора < пороговое значение"), этапы переходят к этапу S04, а если "Нет" ("величина открытия позиции педали акселератора > пороговое значение"), этапы переходят к этапу S06.
Здесь, пороговое значение величины открытия позиции педали акселератора составляет пороговое значение для определения открытия позиции акселератора и по существу равно нулю, но задается равным небольшому вводному значению, которое учитывает шум датчика и т.п.
[0046] На этапе S04, после определения того, что "величина открытия позиции педали акселератора < пороговое значение", на этапе S03, определяется то, продолжается или нет "ток подачи мощности в соленоид < пороговое значение" в течение заданного периода времени или более. Если "Да" (длительность того, что "ток подачи мощности в соленоид < пороговое значение", меньше заданного периода времени), этапы переходят к этапу S05, а если "Нет" (длительность того, что "ток подачи мощности в соленоид < пороговое значение", равна или выше заданного периода времени), этапы переходят к этапу S06.
Здесь, пороговое значение тока подачи мощности в соленоид составляет пороговое значение для определения того, что ток подачи мощности в соленоид является нулевым, и по существу равно нулю, но задается равным небольшому значению тока, которое учитывает незначительные флуктуации в токе. Помимо этого, заданный период времени задается на основе результатов измерений, полученных посредством измерения времени, требуемого для становления передаваемого крутящего момента нулевым, когда операции расцепления муфты 50 управления и главной муфты 54 завершаются после задания тока подачи мощности в соленоид в сцепление 42 с электронным управлением равным нулю.
[0047] На этапе S05, после определения того, что длительность того, что "ток подачи мощности в соленоид < пороговое значение", меньше заданного периода времени на этапе S04, выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, управление начальным крутящим моментом и управление дифференциальным вращением отсекаются на основе вывода этого сигнала прогнозирующего определения вмешательства рекуперативного управления, градиент уменьшения тока подачи мощности в соленоид переключается с уменьшения согласно низкому градиенту в нормальное время на уменьшение согласно высокому градиенту, и этапы переходят к концу.
Здесь, когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, запрос на запрещение рекуперативного управления выводится в секцию управления рекуперацией гибридного модуля 81 управления.
[0048] На этапе S06, после определения "Нет" на любом из этапа S01, этапа S02, этапа S03 и этапа S04, нормальное управление, в котором управление начальным крутящим моментом и управление дифференциальным вращением не отсекаются, выполняется в состоянии, в котором прекращается вывод сигнала прогнозирующего определения вмешательства рекуперативного управления, и этапы переходят к концу.
Здесь, когда этапы переходят к этапу S06, когда выводится запрос на запрещение рекуперативного управления, управление начальным крутящим моментом и управление дифференциальным вращением возвращаются к нормальному управлению на основе прекращения вывода сигнала прогнозирующего определения вмешательства рекуперативного управления. Затем градиент уменьшения тока подачи мощности в соленоид возвращается из уменьшения согласно высокому градиенту к уменьшению согласно низкому градиенту в нормальное время. Помимо этого, прекращается вывод запроса на запрещение рекуперативного управления в секцию рекуперативного управления гибридного модуля 81 управления.
[0049] Фиг. 6 иллюстрирует последовательность операций этапов ожидания начала рекуперативного управления согласно запросу на запрещение рекуперативного управления, из видов рекуперативного управления, которые выполняются посредством гибридного модуля 81 управления. Ниже описывается каждый этап на фиг. 6.
[0050] На этапе S11 определяется то, превышает или нет сила нажатия педали тормоза пороговое значение. Если "Да" ("сила нажатия педали > пороговое значение"), этапы переходят к этапу S12, а если "Нет" (сила нажатия педали < пороговое значение), этапы переходят к концу.
Здесь, пороговое значение силы нажатия педали задается равным значению для определения того, что выполнена операция нажатия педали тормоза.
[0051] На этапе S12, после определения того, что "сила нажатия педали > пороговое значение", на этапе S11, определяется то, превышает или нет скорость транспортного средства нижнее предельное пороговое значение и находится в диапазоне рекуперативного управления, который меньше верхнего предельного порогового значения. Если "Да" ("нижнее предельное пороговое значение < скорость транспортного средства < верхнее предельное пороговое значение"), этапы переходят к этапу S13, а если "Нет" ("скорость транспортного средства < нижнее предельное пороговое значение" или "скорость транспортного средства > верхнее предельное пороговое значение"), этапы переходят к концу.
[0052] На этапе S13, после определения того, что "нижнее предельное пороговое значение < скорость транспортного средства < верхнее предельное пороговое значение", на этапе S12, определяется то, отсутствует или нет запрос на запрещение рекуперативного управления. Если "Да" (отсутствует запрос на запрещение рекуперативного управления), этапы переходят к этапу S14, а если "Нет" (присутствует запрос на запрещение рекуперативного управления), этапы переходят к концу.
Здесь, запрос на запрещение рекуперативного управления вводится посредством этапов прогнозирующего определения вмешательства рекуперативного управления из модуля 85 4WD-управления.
[0053] На этапе S14, после определения того, что запрос на запрещение рекуперативного управления отсутствует на этапе S13, рекуперативное управление начинается, и этапы переходят к концу.
[0054] Далее описываются операции.
Ниже отдельно описываются операция формирования толчка/анормального шума во время вмешательства рекуперативного управления и операция подавления толчка/анормального шума во время вмешательства рекуперативного управления, относительно операций в устройстве управления для гибридного транспортного средства с базовым приводом на четыре колеса FF-типа первого варианта осуществления.
[0055] Операция формирования толчка/анормального шума во время вмешательства рекуперативного управления
Фиг. 7 иллюстрирует механизм формирования толчка/анормального шума, которые формируются в кулачковом механизме сцепления 42 с электронным управлением, когда нажимается тормоз после операции отпускания педали акселератора. Ниже описывается механизм формирования толчка/анормального шума во время вмешательства рекуперативного управления на основе фиг. 7.
[0056] Секция (1) представляет собой секцию, в которой состояние является состоянием вождения с включенным акселератором, крутящий момент передается от источника приведения в движение до ведущих колес, и крутящий момент на карданном валу постепенно увеличивается; в этой секции (1) шарик 53 размещается посередине между пазами 55, 55 кулачка, которые формируются в кулачке 51 управления и главном кулачке 52, и главная муфта 54 зацепляется согласно небольшой передаче крутящего момента (движение).
[0057] Секция (2) представляет собой секцию, в которой выполняется включение-выключение акселератора, после чего тормоз включается, чтобы формировать рекуперативный крутящий момент; крутящий момент на карданном валу за счет этого быстро увеличивается, затем быстро уменьшается, но остаточный крутящий момент 4WD-сцепления находится в состоянии положительного приведения в движение. В этой секции (2) шарик 53 размещается посередине между пазами 55, 55 кулачка, которые формируются в кулачке 51 управления и главном кулачке 52, и главная муфта 54 зацепляется согласно большой передаче крутящего момента (движение).
[0058] Секция (3) представляет собой секцию, в которой крутящий момент крутящего момента на карданном валу уменьшается в состоянии отрицательного движения по инерции вследствие увеличения рекуперативного крутящего момента. В этой секции (3) шарик 53 поддерживается размещенным посередине между пазами 55, 55 кулачка, которые формируются в кулачке 51 управления и главном кулачке 52, и главная муфта 54 зацепляется согласно большой передаче крутящего момента (движение по инерции). Иными словами, состояние становится состоянием передачи крутящего момента при движении по инерции перед инверсией кулачка.
[0059] Секция (4) представляет собой секцию, в которой если крутящий момент на карданном валу находится в состоянии отрицательного движения по инерции, кулачок 51 управления начинает изменять направление перемещения на противоположное с удовлетворением "рекуперативный крутящий момент > крутящий момент в сцеплении", и шарик 53 между пазами 55, 55 кулачка переключается из зажатого состояния в свободное состояние. В этой секции (4), посредством прекращения приложения крутящего момента сразу и перехода в состояние нейтрали, большой крутящий момент при движении по инерции быстро флуктуирует к нулевому крутящему моменту, и толчок и анормальный шум формируются посредством этой флуктуации крутящего момента.
[0060] Фиг. 8 является временной диаграммой, иллюстрирующей каждую характеристику во время вмешательства рекуперативного управления, когда нажимается тормоз после операции отпускания педали акселератора, в сравнительном примере. Ниже описывается операция формирования толчка/анормального шума во время вмешательства рекуперативного управления в сравнительном примере на основе фиг. 8.
[0061] Пример, в котором совместное управление не выполняется между управлением передаваемым крутящим моментом для сцепления с электронным управлением во время операции нажатия педали акселератора и управлением рекуперативным крутящим моментом во время операции нажатия педали тормоза, которые независимо управляются, должен представлять собой сравнительный пример. В случае этого сравнительного примера, операция нажатия педали акселератора выполняется во время t1, нога убирается с акселератора во время t2, и операция нажатия педали тормоза выполняется во время t3. В это время t3, тогда как предусмотрено формирование рекуперативного крутящего момента в соответствии с операцией нажатия педали тормоза, крутящий момент уменьшается посредством постепенного наклона до времени t4. Соответственно, как описано выше в механизме формирования, при переходе в состояние нейтрали посредством изменения направления перемещения на противоположное кулачка 51 управления во время t4, фактический крутящий момент резко изменен с большого крутящего момента при движении по инерции на нулевой крутящий момент, как проиллюстрировано посредством характеристики фактического крутящего момента, указываемой посредством стрелки A. Затем согласно этому резкому изменению в фактическом крутящем моменте, формируется толчок/анормальный шум, как проиллюстрировано посредством характеристики вертикального G сцепления стрелки B.
[0062] Операция подавления толчка/шума во время вмешательства рекуперативного управления
Ниже описывается операция подавления толчка/шума во время вмешательства рекуперативного управления в первом варианте осуществления на основе фиг. 4-6.
[0063] Ниже описывается управление распределением движущей силы в модуле 85 4WD-управления.
Когда условие по рекуперативной скорости транспортного средства ("нижнее предельное пороговое значение < скорость транспортного средства < верхнее предельное пороговое значение") удовлетворяется, условие открытия позиции педали акселератора ("величина открытия позиции педали акселератора < пороговое значение") удовлетворяется, и длительность того, что "ток подачи мощности в соленоид < пороговое значение", меньше заданного периода времени, этапы продолжаются в порядке "этап S01 -> этап S02 -> этап S03 -> этап S04 -> этап S05" на блок-схеме последовательности операций способа по фиг. 5. На этапе S05, выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, отсекаются управление начальным крутящим моментом и управление дифференциальным вращением, и градиент уменьшения тока подачи мощности в соленоид переключается с уменьшения согласно низкому градиенту в нормальное время на уменьшение согласно высокому градиенту.
Иными словами, при приеме сигнала прогнозирующего определения вмешательства рекуперативного управления из блока B08 прогнозирующего определения вмешательства рекуперативного управления, блок B09 переключения крутящего момента задает крутящий момент как из процессора B01 начального крутящего момента, так и из процессора B02 крутящего момента дифференциального вращения равным нулю (отсекает), как проиллюстрировано на фиг. 4. Помимо этого, при приеме сигнала прогнозирующего определения вмешательства рекуперативного управления из блока B08 прогнозирующего определения вмешательства рекуперативного управления, блок B11 переключения градиента переключается с градиента уменьшения (низкого градиента) в нормальное время на градиент уменьшения (высокий градиент) во время определения управления. Помимо этого, запрос на запрещение рекуперативного управления выводится в секцию рекуперативного управления гибридного модуля 81 управления, в то время как выводится сигнал прогнозирующего определения вмешательства рекуперативного управления.
[0064] Затем если длительность того, что "ток подачи мощности в соленоид < пороговое значение", становится равной или превышающей заданный период времени, этапы продолжаются в порядке "этап S01 -> этап S02 -> этап S03 -> этап S04 -> этап S06" на блок-схеме последовательности операций способа по фиг. 5. На этапе S06, прекращается вывод сигнала прогнозирующего определения вмешательства рекуперативного управления, управление возвращается к нормальному управлению, при котором управление начальным крутящим моментом и управление дифференциальным вращением не отсекаются, и градиент уменьшения тока подачи мощности в соленоид переключается с уменьшения согласно высокому градиенту на уменьшение согласно низкому градиенту в нормальное время. Когда этапы переходят к этапу S06, когда выводится запрос на запрещение рекуперативного управления, запрос на запрещение рекуперативного управления в секцию рекуперативного управления гибридного модуля 81 управления извлекается на основе прекращения вывода сигнала прогнозирующего определения вмешательства рекуперативного управления.
[0065] Далее описывается рекуперативное управление в гибридном модуле 81 управления.
Когда условие по силе нажатия педали тормоза ("сила нажатия педали > пороговое значение") и условие по рекуперативной скорости транспортного средства ("нижнее предельное пороговое значение < скорость транспортного средства < верхнее предельное пороговое значение") удовлетворяются, этапы продолжаются в порядке "этап S11 -> этап S12 -> этап S13" на блок-схеме последовательности операций способа по фиг. 6. На этапе S13, определяется то, отсутствует или нет запрос на запрещение рекуперативного управления; если запрос на запрещение рекуперативного управления присутствует, этапы переходят к концу, и начало рекуперативного управления откладывается, даже если условие по рекуперативному управлению во время торможения удовлетворяется. Затем если определено то, что запрос на запрещение рекуперативного управления отсутствует, на этапе S13, этапы переходят к этапу S14, и рекуперативное управление начинается на этапе S14. Иными словами, в то время как выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, начало рекуперативного управления откладывается, даже если выполняется операция нажатия педали тормоза.
[0066] Фиг. 9 является временной диаграммой, иллюстрирующей каждую характеристику во время вмешательства рекуперативного управления, когда нажимается тормоз после операции отпускания педали акселератора, в первом варианте осуществления. Ниже описывается операция формирования толчка/анормального шума во время вмешательства рекуперативного управления в первом варианте осуществления на основе фиг. 9.
[0067] В случае первого варианта осуществления, аналогично сравнительному примеру, операция нажатия педали акселератора выполняется во время t1, нога убирается с акселератора во время t2, и операция нажатия педали тормоза выполняется во время t3. Во время t2, когда нога убирается с акселератора, градиент уменьшения командуемого крутящего 4WD-момента (фактического крутящего момента) является высоким градиентом, как проиллюстрировано посредством характеристики командуемого крутящего 4WD-момента (характеристики фактического крутящего момента) стрелки C на фиг. 9. Соответственно, командуемый крутящий 4WD-момент (фактический крутящий момент) становится нулевым во время t2', которое идет сразу после времени t2.
[0068] Затем проверяется длительность, в течение которой ток сцепления поддерживается нулевым, как проиллюстрировано посредством характеристики тока сцепления стрелки D на фиг. 9. Затем когда условие длительности операции нажатия педали тормоза после времени t3 удовлетворяется, рекуперативное управление начинается при возвращении к нормальному 4WD-управлению, как проиллюстрировано посредством характеристики рекуперативного крутящего момента и характеристики командуемого крутящего 4WD-момента стрелки E на фиг. 9. Таким образом, поскольку остаточный крутящий момент сцепления 42 с электронным управлением задается равным нулю, и рекуперативное управление начинается во время операции нажатия педали тормоза после операции отпускания педали акселератора, формирование толчка/анормального шума подавляется, как проиллюстрировано посредством характеристики вертикального G сцепления стрелки F на фиг. 9.
[0069] Как описано выше, в первом варианте осуществления, используется конфигурация, в которой во время операции нажатия педали тормоза после операции отпускания педали акселератора, выполняется совместное управление посредством вмешательства рекуперативного управления, при котором передаваемый крутящий момент сцепления 42 с электронным управлением задается равным нулю, перед началом рекуперативного управления посредством электромотора-генератора 4.
Иными словами, остаточный крутящий момент (крутящий момент приведения в движение) сцепления 42 с электронным управлением становится нулевым до того, как крутящий момент при движении по инерции, возникающий вследствие вмешательства рекуперативного управления, вводится в сцепление 42 с электронным управлением. Соответственно, передача крутящего момента сцепления 42 с электронным управлением подавляется, даже если рекуперативное управление вмешивается.
Как результат, формирование толчка посредством вмешательства рекуперативного управления может предотвращаться, когда нажимается тормоз после операции нажатия педали акселератора.
[0070] В первом варианте осуществления, используется конфигурация, в которой блок B08 прогнозирующего определения вмешательства рекуперативного управления выводит сигнал прогнозирующего определения вмешательства рекуперативного управления, когда удовлетворяются условие по рекуперативной скорости транспортного средства и условие открытия позиции педали акселератора, и когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, градиент уменьшения значения команды управления передаваемым крутящим моментом из блока B11 переключения градиента задается равным более крутому градиенту, чем градиент уменьшения в нормальное время, имеющий задержку отклика.
Иными словами, в течение нормального времени, в которое отсутствует вмешательство рекуперативного управления, при задании значения команды управления передаваемым крутящим моментом для сцепления 42 с электронным управлением равным нулю посредством операции отпускания педали акселератора, значение команды управления передаваемым крутящим моментом уменьшается посредством градиента постепенного уменьшения, чтобы предотвращать быстрое изменение распределения движущей силы. Тем не менее, если значение команды управления передаваемым крутящим моментом уменьшается посредством градиента постепенного уменьшения в случае, в котором ожидается вмешательство рекуперативного управления, время, требуемое для становления передаваемого крутящего момента (остаточного крутящего момента) сцепления 42 с электронным управлением нулевым, становится длинным.
Напротив, поскольку значение команды управления передаваемым крутящим моментом уменьшается посредством крутого градиента уменьшения в случае, в котором ожидается вмешательство рекуперативного управления, быстрое изменение распределения движущей силы в течение нормального времени может предотвращаться, при одновременной возможности задавать передаваемый крутящий момент сцепления 42 с электронным управлением равным нулю за короткий период времени в случае, в котором ожидается вмешательство рекуперативного управления. Помимо этого, время ожидания для начала рекуперативного управления сокращается, и рекуперативная эффективность может быть повышена по сравнению со случаем, в котором градиент уменьшения не изменяется.
[0071] В первом варианте осуществления, используется конфигурация, в которой запрос на запрещение рекуперативного управления выводится в течение предварительно определенного времени от вывода сигнала прогнозирующего определения вмешательства рекуперативного управления, и когда условие по рекуперативной скорости транспортного средства удовлетворяется, когда тормоз нажимается, начало рекуперативного управления посредством электромотора-генератора 4 задерживается, в то время как выводится запрос на запрещение рекуперативного управления.
Иными словами, рекуперативное управление посредством электромотора-генератора 4 представляет собой быстро реагирующее управление, и крутящий момент при движении по инерции формируется сразу, когда начинается рекуперативное управление. Соответственно, если ожидается вмешательство рекуперативного управления, рекуперативное управление начинается после того, как передаваемый крутящий момент сцепления 42 с электронным управлением надежно становится нулевым, посредством задержки начала рекуперативного управления посредством электромотора-генератора 4 до тех пор, пока не истечет предварительно определенное время с прогнозного времени.
Следовательно, если ожидается вмешательство рекуперативного управления, формирование толчка вследствие вмешательства рекуперативного управления может надежно предотвращаться, когда нажимается тормоз после операции отпускания педали акселератора, посредством задержки начала рекуперативного управления на стороне рекуперативного управления.
[0072] В первом варианте осуществления, используется конфигурация, в которой когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, управление начальным крутящим моментом и управление крутящим моментом дифференциального вращения отсекаются, и когда предварительно определенное время истекло с момента вывода значения команды управления, чтобы задавать передаваемый крутящий момент сцепления 42 с электронным управлением равным нулю, отсечка управления начальным крутящим моментом и управления крутящим моментом дифференциального вращения прекращается и возвращается к нормальному управлению.
Иными словами, поскольку передаваемый крутящий момент сцепления 42 с электронным управлением задается равным нулю, если ожидается вмешательство рекуперативного управления, необходимо отсекать управление начальным крутящим моментом и управление крутящим моментом дифференциального вращения. Тем не менее, желательно восстанавливать управление отсеканием на ранней стадии. Таким образом, управление восстанавливается, когда предварительно определенное время истекло с момента вывода значения команды управления с нулевым передаваемым крутящим моментом в сцепление 42 с электронным управлением.
Следовательно, передаваемый крутящий момент может формироваться посредством нормального управления распределением движущей силы на четыре колеса во время рекуперативного управления посредством электромотора-генератора 4.
[0073] В первом варианте осуществления, используется конфигурация, в которой сцепление 42 с электронным управлением содержит муфту 50 управления, кулачковый механизм, сконфигурированный из шарика 53, который размещается посередине между пазами 55, 55 кулачка, сформированными в кулачке 51 управления и главном кулачке 52, и главную муфту 54.
Следовательно, толчок, возникающий вследствие вмешательства рекуперативного управления при работе в состоянии с приводом на четыре колеса, может предотвращаться при одновременном предотвращении формирования анормального шума посредством кулачкового механизма.
[0074] Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться за счет устройства управления для гибридного транспортного средства с базовым приводом на четыре колеса FF-типа согласно первому варианту осуществления.
[0075] (1) Устройство управления для электрического транспортного средства с приводом на четыре колеса (гибридного транспортного средства с базовым приводом на четыре колеса FF-типа), в котором источник приведения в движение имеет электромотор-генератор 4 и сцепление 42 с электронным управлением, предоставляется в тракте передачи мощности приведения в движение, идущем от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне, содержащее:
- средство управления распределением мощности привода на четыре колеса (модуль 85 4WD-управления), которое выводит в сцепление 42 с электронным управлением значение команды управления передаваемым крутящим моментом, чтобы приводить к состоянию с приводом на четыре колеса, в соответствии с состоянием транспортного средства, при этом:
- средство управления распределением мощности привода на четыре колеса (модуль 85 4WD-управления) имеет контроллер координирования вмешательства рекуперативного управления (фиг. 5), который, когда рекуперативное управление посредством электромотора-генератора 4 вмешивается во время состояния с приводом на четыре колеса, доводит передаваемый крутящий момент сцепления 42 с электронным управлением до нуля перед инициированием рекуперативного управления.
Соответственно, можно предотвращать возникновение толчка вследствие вмешательства рекуперативного управления при работе в состоянии с приводом на четыре колеса.
[0076] (2) Содержит средство рекуперативного управления (гибридный модуль 81 управления), которое выводит значение команды управления рекуперативным крутящим моментом в электромотор-генератор 4 в соответствии с величиной операции нажатия педали тормоза во время операции нажатия педали тормоза, при этом:
- средство управления распределением мощности привода на четыре колеса (модуль 85 4WD-управления) выводит значение команды управления передаваемым крутящим моментом, которое изменяет передаваемый крутящий момент передних и задних колес в соответствии с рабочей величиной нажатия педали акселератора во время операции нажатия педали акселератора в сцепление 42 с электронным управлением, и
- контроллер координирования вмешательства рекуперативного управления (фиг. 5) задает передаваемый крутящий момент сцепления 42 с электронным управлением равным нулю перед началом рекуперативного управления посредством электромотора-генератора 4, во время операции нажатия педали тормоза после операции отпускания педали акселератора.
Соответственно, помимо преимущества (1), формирование толчка посредством вмешательства рекуперативного управления может предотвращаться, когда нажимается тормоз после операции нажатия педали акселератора.
[0077] (3) Средство управления распределением мощности привода на четыре колеса (модуль 85 4WD-управления) содержит секцию инструктирования передаваемого крутящего момента (блок B11 переключения градиента), которая уменьшает значение команды управления передаваемым крутящим моментом с предварительно определенной задержкой отклика при уменьшении значения команды управления передаваемым крутящим моментом после уменьшения рабочей величины нажатия педали акселератора, и
- контроллер координирования вмешательства рекуперативного управления (блок B08 прогнозирующего определения вмешательства рекуперативного управления) выводит сигнал прогнозирующего определения вмешательства рекуперативного управления, когда удовлетворяются условие по рекуперативной скорости транспортного средства и условие открытия позиции педали акселератора, и когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, градиент уменьшения значения команды управления передаваемым крутящим моментом из секции инструктирования передаваемого крутящего момента (блока B11 переключения градиента) задается равным более крутому градиенту, чем градиент уменьшения в нормальное время, имеющий задержку отклика (фиг. 4).
Соответственно, помимо преимуществ (2), быстрое изменение распределения движущей силы в течение нормального времени может предотвращаться при одновременной возможности задавать передаваемый крутящий момент сцепления 42 с электронным управлением равным нулю за короткий период времени в случае, в котором ожидается вмешательство рекуперативного управления.
[0078] (4) Контроллер координирования вмешательства рекуперативного управления (блок B08 прогнозирующего определения вмешательства рекуперативного управления) выводит запрос на запрещение рекуперативного управления в течение предварительно определенного периода времени после вывода сигнала прогнозирующего определения вмешательства рекуперативного управления, и
- когда условие по рекуперативной скорости транспортного средства удовлетворяется, когда тормоз нажимается, средство рекуперативного управления (гибридный модуль 81 управления) задерживает начало рекуперативного управления посредством электромотора-генератора 4, в то время как выводится запрос на запрещение рекуперативного управления (фиг. 6).
Соответственно, помимо преимущества (3), формирование толчка посредством вмешательства рекуперативного управления может надежно предотвращаться, когда нажимается тормоз после операции нажатия педали акселератора.
[0079] (5) Средство управления распределением мощности привода на четыре колеса (модуль 85 4WD-управления) выполняет управление начальным крутящим моментом на основе скорости транспортного средства (процессор B01 начального крутящего момента), управление крутящим моментом дифференциального вращения на основе дифференциального вращения между передними и задними колесами (процессор B02 крутящего момента дифференциального вращения) и управление крутящим моментом распределения движущей силы на основе величины открытия позиции педали акселератора (процессор B03 крутящего момента дифференциального вращения), и
- когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, контроллер координирования вмешательства рекуперативного управления (блок B08 прогнозирующего определения вмешательства рекуперативного управления, блок B09 переключения крутящего момента) отсекает управление начальным крутящим моментом и управление крутящим моментом дифференциального вращения, и когда предварительно определенное время истекло с момента вывода значения команды управления, чтобы задавать передаваемый крутящий момент сцепления 42 с электронным управлением равным нулю, отсечка управления начальным крутящим моментом и управления крутящим моментом дифференциального вращения прекращается и возвращается к нормальному управлению (фиг. 4).
Соответственно, помимо преимуществ (3) или (4), передаваемый крутящий момент может формироваться посредством нормального управления распределением движущей силы на четыре колеса во время рекуперативного управления посредством электромотора-генератора 4.
[0080] (6) Сцепление 42 с электронным управлением представляет собой сцепление, содержащее муфту 50 управления, которая зацепляется посредством значения тока снаружи соленоиду 45, кулачковый механизм, сконфигурированный из шарика 53, который размещается посередине между пазами 55, 55 кулачка, сформированными в кулачке 51 управления и главном кулачке 52, и главную муфту 54, которая зацепляется через кулачковый механизм (фиг. 2, 3).
Соответственно, помимо преимуществ (1)-(5), толчок, возникающий вследствие вмешательства рекуперативного управления при работе в состоянии с приводом на четыре колеса, может предотвращаться при одновременном предотвращении формирования анормального шума посредством кулачкового механизма.
[0081] Устройство управления для электрического транспортного средства с приводом на четыре колеса настоящего изобретения описано выше на основе первого варианта осуществления, но его конкретные конфигурации не ограничены этим первым вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0082] В первом варианте осуществления, показан пример сцепления, имеющего муфту 50 управления, кулачковый механизм и главную муфту 54 в качестве сцепления 42 с электронным управлением. Тем не менее, при условии, что сцепление управляет распределением движущей силы на передние и задние колеса посредством команды извне, сцепление с электронным управлением может представлять собой многодисковую муфту и т.п., которая работает посредством управляющего давления масла.
[0083] В первом варианте осуществления, показан пример, в котором устройство управления настоящего изобретения применяется к гибридному транспортному средству с базовым приводом на четыре колеса FF-типа. Тем не менее, устройство управления настоящего изобретения не ограничено гибридным транспортным средством с базовым приводом на четыре колеса FF-типа и также может применяться к гибридному транспортному средству с базовым приводом на четыре колеса FR-типа. Помимо этого, устройство управления не ограничено гибридным транспортным средством с приводом на четыре колеса и также может применяться к электрическому транспортному средству с приводом на четыре колеса. Вкратце, настоящее изобретение может применяться к любому электрическому транспортному средству с приводом на четыре колеса, в котором источник приведения в движение имеет электромотор-генератор, и сцепление с электронным управлением предоставляется в тракте передачи мощности приведения в движение, идущем от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне.






Изобретение относится к электрическим транспортным средствам. Устройство управления для электрического транспортного средства с приводом на четыре колеса посредством электромотора-генератора содержит средство управления распределением мощности, которое выводит в сцепление с электронным управлением значение команды управления передаваемым крутящим моментом для приведения к состоянию с приводом на четыре колеса. Средство управления распределением мощности привода имеет контроллер координирования вмешательства рекуперативного управления, который, когда рекуперативное управление посредством электромотора-генератора вмешивается во время состояния с приводом на четыре колеса, доводит крутящий момент сцепления с электронным управлением до нуля перед инициированием рекуперативного управления. Предотвращается рывок при рекуперативном управлении. 6 з.п. ф-лы, 9 ил.
1. Устройство управления для электрического транспортного средства с приводом на четыре колеса, в котором источник приведения в движение имеет электромотор-генератор, и сцепление с электронным управлением предоставляется в тракте передачи мощности приведения в движение, идущем от источника приведения в движение на передние и задние колеса, которое управляет распределением мощности передних и задних колес посредством команды извне, содержащее:
- средство управления распределением мощности привода на четыре колеса, которое выводит в сцепление с электронным управлением значение команды управления передаваемым крутящим моментом, чтобы приводить к состоянию с приводом на четыре колеса, в соответствии с состоянием транспортного средства, при этом:
- средство управления распределением мощности привода на четыре колеса имеет контроллер координирования вмешательства рекуперативного управления, который, когда рекуперативное управление посредством электромотора-генератора вмешивается во время состояния с приводом на четыре колеса, доводит передаваемый крутящий момент сцепления с электронным управлением до нуля перед инициированием рекуперативного управления.
2. Устройство управления для электрического транспортного средства с приводом на четыре колеса по п.1, содержащее:
- средство рекуперативного управления, которое выводит значение команды управления рекуперативным крутящим моментом в электромотор-генератор в соответствии с величиной операции нажатия педали тормоза во время операции нажатия педали тормоза, при этом:
- средство управления распределением мощности привода на четыре колеса выводит значение команды управления передаваемым крутящим моментом, которое изменяет передаваемый крутящий момент передних и задних колес в соответствии с рабочей величиной нажатия педали акселератора во время операции нажатия педали акселератора в сцепление с электронным управлением, и
- контроллер координирования вмешательства рекуперативного управления задает передаваемый крутящий момент сцепления с электронным управлением равным нулю перед началом рекуперативного управления посредством электромотора-генератора во время операции нажатия педали тормоза после операции отпускания педали акселератора.
3. Устройство управления для электрического транспортного средства с приводом на четыре колеса по п.2, в котором:
- средство управления распределением мощности привода на четыре колеса содержит секцию инструктирования передаваемого крутящего момента, которая уменьшает значение команды управления передаваемым крутящим моментом с предварительно определенной задержкой отклика при уменьшении значения команды управления передаваемым крутящим моментом после уменьшения рабочей величины нажатия педали акселератора, и
- контроллер координирования вмешательства рекуперативного управления выводит сигнал прогнозирующего определения вмешательства рекуперативного управления, когда удовлетворяются условие по рекуперативной скорости транспортного средства и условие открытия позиции педали акселератора и когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, градиент уменьшения значения команды управления передаваемым крутящим моментом из секции инструктирования передаваемого крутящего момента задается равным более крутому градиенту, чем градиент уменьшения в нормальное время, имеющий задержку отклика.
4. Устройство управления для электрического транспортного средства с приводом на четыре колеса по п.3, в котором:
- контроллер координирования вмешательства рекуперативного управления выводит запрос на запрещение рекуперативного управления в течение предварительно определенного периода времени после вывода сигнала прогнозирующего определения вмешательства рекуперативного управления, и
- когда условие по рекуперативной скорости транспортного средства удовлетворяется, когда тормоз нажимается, средство рекуперативного управления задерживает начало рекуперативного управления посредством электромотора-генератора, в то время как выводится запрос на запрещение рекуперативного управления.
5. Устройство управления для электрического транспортного средства с приводом на четыре колеса по п.3 или 4, в котором:
- средство управления распределением мощности привода на четыре колеса выполняет управление начальным крутящим моментом на основе скорости транспортного средства, управление крутящим моментом дифференциального вращения на основе дифференциального вращения между передними и задними колесами и управление крутящим моментом распределения движущей силы на основе величины открытия позиции педали акселератора, и
- когда выводится сигнал прогнозирующего определения вмешательства рекуперативного управления, контроллер координирования вмешательства рекуперативного управления отсекает управление начальным крутящим моментом и управление крутящим моментом дифференциального вращения, и когда предварительно определенное время истекло с момента вывода значения команды управления, чтобы задавать передаваемый крутящий момент сцепления с электронным управлением равным нулю, отсечка управления начальным крутящим моментом и управления крутящим моментом дифференциального вращения прекращается и возвращается к нормальному управлению.
6. Устройство управления для электрического транспортного средства с приводом на четыре колеса по любому из пунктов 1-4, в котором:
- сцепление с электронным управлением представляет собой сцепление, содержащее управляемую муфту, которая зацепляется посредством значения тока снаружи соленоиду, кулачковый механизм, сконфигурированный из шарика, который размещается посередине между пазами кулачка, сформированными в кулачке управления и главном кулачке, и главную муфту, которая зацепляется через кулачковый механизм.
7. Устройство управления для электрического транспортного средства с приводом на четыре колеса по п. 5, в котором:
- сцепление с электронным управлением представляет собой сцепление, содержащее управляемую муфту, которая зацепляется посредством значения тока снаружи соленоиду, кулачковый механизм, сконфигурированный из шарика, который размещается посередине между пазами кулачка, сформированными в кулачке управления и главном кулачке, и главную муфту, которая зацепляется через кулачковый механизм.
| JP 2003327000 A, 19.11.2003 | |||
| JP 2000043696 A, 15.02.2000 | |||
| JP H10304509 A, 13.11.1998 | |||
| JP 2012105461 A, 31.05.2012. |

