Изобретение относится к измерительной технике, в частности к устройствам для измерения деформаций и перемещений и предназначено для измерения статических или плавно меняющихся перемещений. Кроме того оно может быть использовано для измерения параметров перемещения пишущего узла при записи и исследовании рукописных текстов.
Известно «Звуковое перо для считывания рукописной информации» (SU №460552 от 27.03.75 G06K 9/00), содержащее корпус, в котором укреплены излучатель и пишущий узел. Невысокая точность этого устройства в силу физических проблем распространения звуковых колебаний не позволяет использовать его для считывания рукописной информации.
Известно «Перо для ввода рукописных символов» (SU №638988 от 28.12.78 г. G06K 9/00), содержащее корпус с размещенным в нем пишущим стержнем, пьезоэлектрическими пластинами, расположенными вдоль стержня, инерционными элементами для учета ускорения движения устройства. Недостатком устройства является то, что снимаемый сигнал отражает интегральную характеристику движения пера, но не фиксирует особенности почерка, а именно частные признаки почерка, в том числе и усилие давления на пишущий узел.
Наиболее близким к заявляемому техническому решению является «Многокомпонентный датчик перемещений» (RU №2422785 от 27.06 2011, G01L 1/04), который снабжен силоприемным элементом, выполненным в виде упругого цилиндрического стержня, жестко защемленного во внутренней проточке корпуса датчика, а чувствительный элемент выполнен в виде двух полых конусов, сопряженных своими основаниями большого диаметра с цилиндрическим кольцом и разрезанных по образующим на ряд упругих секций, при этом первый полый конус жестко скреплен своим малым основанием с корпусом и посредством контакта боковой внешней конической поверхностью с внутренней конической поверхностью цанги, установленной с возможностью осевого перемещения и фиксируемой с помощью прижимной втулки, второй полый конус, состоящий из упругих секций с тензодатчиками, установленными в области наибольших деформаций, соединен с первым полым конусом с помощью цилиндрического кольца, ограничивающего перемещение цанги, каждая из упругих секций представляет собой сдвоенные балки, размещенные по кольцу, защемленные с одной стороны во внутренней проточке корпуса, а с другой стороны, контактирующие с цилиндрической поверхностью силоприемного элемента посредством ограничительного пружинного кольца. Недостатком приведенного решения является сложность конструктивного исполнения, сложность и длительность тарировки датчика и проведения измерений, невозможность измерения осевого перемещения.
Задачей изобретения является расширение функциональных возможностей устройства, за счет избирательного, по всем направлениям пространства, измерения статических или плавно меняющихся перемещений с их последующей оцифровкой.
Задача изобретения решается тем, что цифровой многокомпонентный датчик перемещений выполнен следующим образом: упругий корпус датчика выполнен в виде моноблока из композитного материала путем навивки ленты из термопластичного материала с последующей полимеризацией слоев, с размещением в слоях его тензодатчиков деформаций, токопроводящих элементов и контактных групп, смонтированных в слоях корпуса, вышеуказанный моноблок корпуса имеет следующую структуру слоев различающихся по выполняемым функциям в составе корпуса, считая снаружи внутрь, защитный слой, защищающий элементы датчика от воздействия внешней среды, выравнивающий толщину слой, содержащий отверстия и углубления под выступающие части последующего слоя, приборный слой, содержащий тензодатчики, токопроводящие элементы и контактные группы, опорный слой, воспринимающий нагрузку при написании рукописного текста, элемент передачи осевого давления пишущего узла выполнен в виде полого стержня с установленным в нем пишущим узлом и соединен торцом с чувствительным элементом, выполненным в виде упругой мембраны, защемленной в корпусе датчика, причем элемент передачи осевого перемещения пишущего узла выполнен в виде шарика, контактирующего с пьезоэлементом, в качестве которого использован пьезоэлемент прямого эффекта перемещений, причем ось чувствительности пьезоэлемента совпадает с продольной осью датчика, защитный слой корпуса может быть выполнен в виде тонкостенного металлического чехла, скрепленного с композитной оболочкой корпуса, ограничивающего изгибные деформации корпуса.
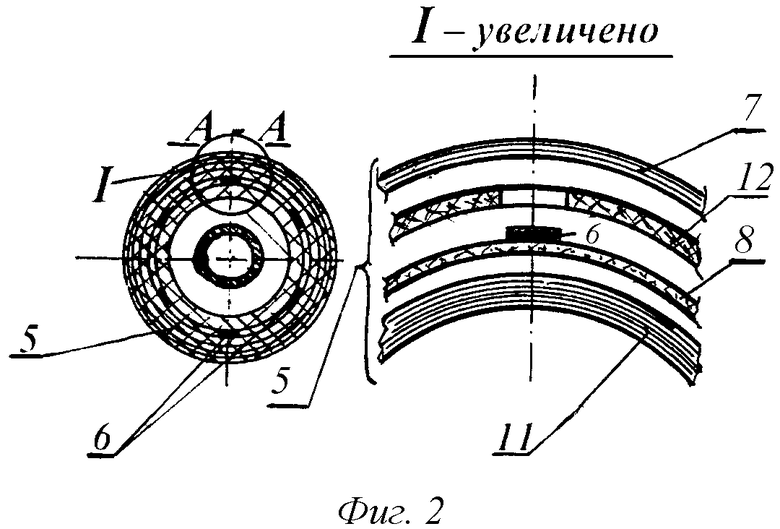
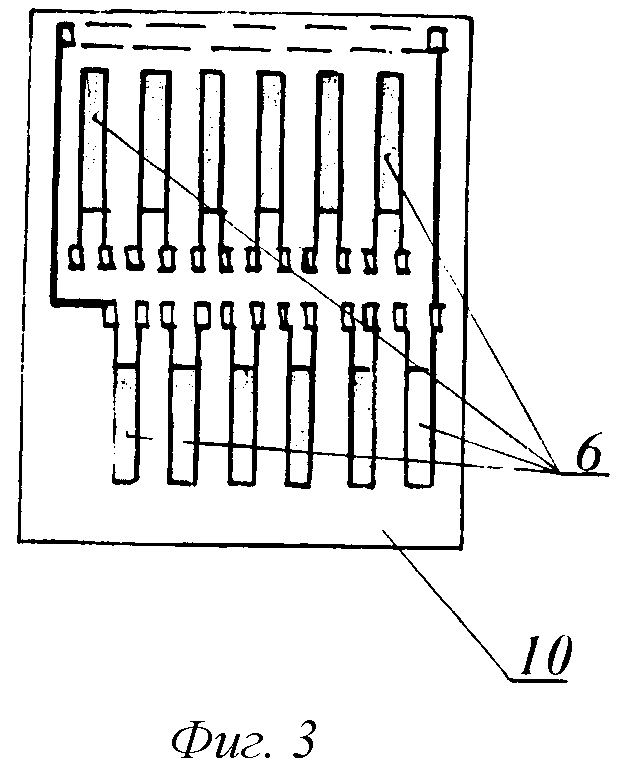
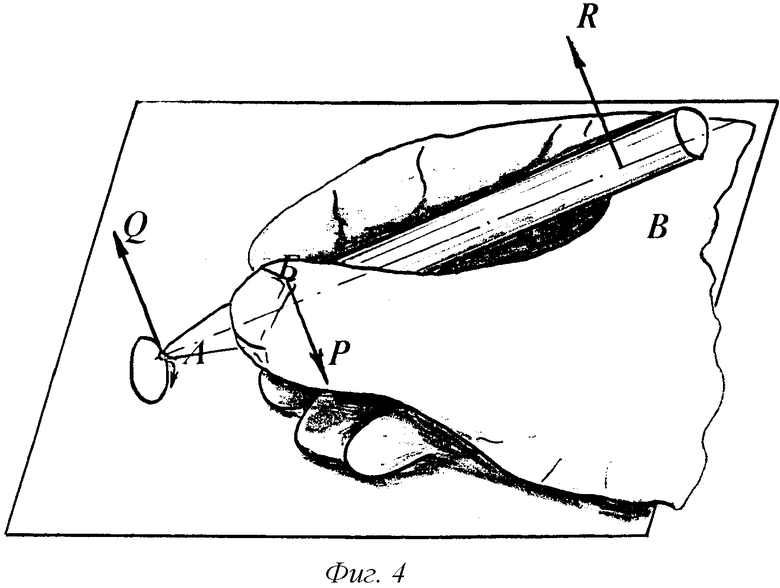
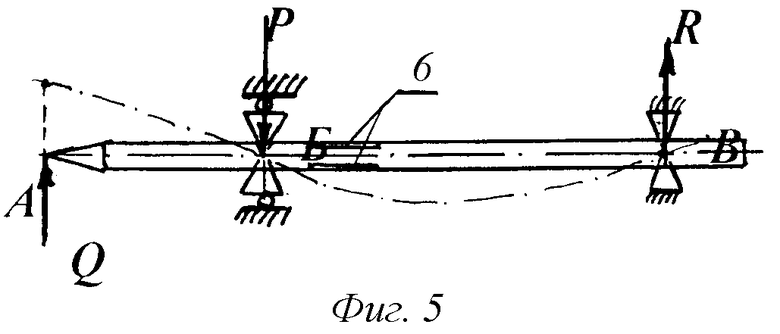
На фиг.1 представлен датчик в разрезе, на фиг.2 - элементы корпуса по слоям в увеличенном виде; на фиг.3 - развертка опорного слоя композитной оболочки корпуса по месту расположения тензодатчиков; на фиг.4 - положение датчика при написании текста; на фиг.5 - схема распределения нагрузок при написании текста; на фиг.6 - структурно-функциональная схема устройства.
Датчик (фиг.1) содержит корпус 1 многослойной конструкции из композитного материала, с крышкой 2, элемент 3 передачи осевой нагрузки, выполненный в виде полого цилиндрического стержня, с размещенным в его внутренней полости пишущим узлом 4. Крышка 2 соединяется с корпусом резьбой. Чувствительным элементом, воспринимающим нагрузки при написании текста, в данной конструкции датчика является упруго-податливая оболочка 5 корпуса 1, снабженная тензодатчиками 6, расположенными в толще между слоями композитной конструкции в зоне наибольших изгибных деформаций. По своим функциональным предназначениям слои корпуса выполняют разные функции. Если рассматривать их последовательно с верхнего наружного слоя внутрь корпуса, то можно ограничиться четырьмя слоями. Наружный слой 7, самый тонкий, выполняет защитную функцию, защищая последующие слои: выравнивающий толщину 12 и приборный 8, содержащий тензодатчики 6 радиальных перемещений, проводящие элементы, контактные группы от повреждений при избыточных нагрузках и неблагоприятного воздействия внешней среды. Этот слой может быть выполнен в виде защитного чехла 9, в виде тонкостенной цилиндрической оболочки, скрепленной с композитным корпусом. Следующим слоем является выравнивающий толщину слой 12, который в конструкции многослойной оболочки корпуса 1 является технологическим элементом. Он содержит технологические отверстия, углубления под выступающие элементы нижележащего слоя 8, защищая элементы этого слоя от технологических повреждений при навивке последующих слоев. Приборный слой 8 является слоем, выполняющим основную функцию датчика, он содержит тензодатчики, проводящие элементы, контактные группы и другие элементы. Выполненный в виде микросхемы на гибкой полимерной пленке 10 (фиг.3) он приклеивается к опорному слою 11, собственно к чувствительному элементу датчика. Последним является опорный слой 11, являющийся собственно чувствительным элементом датчика, он определяет деформационные свойства датчика, ибо его изгибные напряжения при написании рукописного текста определяют чувствительность датчика, его надежность и неизменность характеристик. При написании рукописного текста корпус 1 датчика опирается в точке контакта пишущего узла 4 (А) (фиг.4), в месте зажима корпуса пальцами руки (Б) и в месте опирания корпуса датчика о кисть руки (В). В силовой схеме датчика (фиг.5) его корпус представляет собой консольную балку цилиндрического сечения, нагружаемую со стороны пишущего узла и пальцев руки сосредоточенными радиальными нагрузками при контакте пишущего узла о поверхность листа бумаги или другой поверхности. При написании рукописного текста передача нагрузок от пишущего узла на тонкостенную упругую оболочку корпуса 1, которая выступает в роли чувствительного элемента, происходит через пальцы пользователя, держащего корпус датчика (фиг.4). Тонкостенная оболочка чувствительного элемента упруго деформируется, в зависимости от характера прилагаемой нагрузки, а поэтому каждый датчик 6, включенный в силовую схему корпуса, нагружается по-разному. Для каждого направления радиального перемещения пишущего узла, со смонтированным в конструкцию корпуса тензодатчиком собирается отдельный измерительный полумост, включенный в электрическую схему. Для вывода проводников с тензодатчиков в корпусе используется приборный слой 8, содержащий тензодатчики, проводящие элементы и контактные группы, внутренняя полость с контактными элементами выходит в полость крышки 2 корпуса (на чертежах не показана). Входящая в состав приборного слоя микросхема 10 может, например, обеспечивать обмен данными с отдельной системой, выполняющей автоматическую запись измеряемых перемещений. Для раздельного измерения давления пишущего узла 4 в осевом направлении, в него введен пьезодатчик 13 осевого перемещения, смонтированный в днище упругой мембраны 14, защемленной в задней части корпуса 1. Пьезоэлемент 13 выполнен в виде диска из пьезокерамики с электродами на торцах диска [1, 2]. Электроды пьезодатчика 13 электрически связаны с входом измерительной схемы, а механически посредством полого стержня 3 и шарика 15 - с источниками статической и переменной нагрузок. При преобразовании сигнала осевого перемещения в электрические сигналы использован способ, прямого пьезоэффекта, когда сигнал перемещения воздействует на пьезоэлемент и вызывает изменение электрического сигнала на выходе пьезодатчика. Для этого в конструкции датчика пьезоэлемент 13 предварительно поджат с помощью винта 16 и пружины 17, а измеряемое осевое давление пишущего узла 4 прикладывается через упругую мембрану 14. Пружина 17 с винтом 16 и шариком 15 предназначены для создания первоначального нерабочего усилия в контакте с пьезоэлементом 13 датчика осевого давления. При ввинчивании регулировочного винта 16 прогибается мембрана 14 и создается усилие, пропорциональное перемещению винта 16, от этого усилия в зоне соприкосновения шарика 15 и пьезоэлемента 13 возникает напряжение, пропорциональное предварительному нагружению.
Устройство работает следующим образом. После сборки в единое устройство происходит настройка измерительной аппаратуры и тарировка тензодатчиков 6 изгибных напряжений и пьезодатчика 13 осевого давления пишущего узла 4. Индивидуальная тарировка датчика каждого направления позволяет устранить погрешность измерений из-за технологических погрешностей изготовления композитного корпуса и отклонения параметров тензо- и пьезоэлементов. Каждый канал измерений тарируется индивидуально. Пьезодатчик 13 нагружается с помощью винта 16 предварительного нагружения. При совместном ввинчивании винта 16 и крышки 2 корпуса осевая нагрузка передается через шарик 15 на пьезоэлемент и мембрану 14, прогибается упругая мембрана 14, ее прогиб фиксируется регистрирующим прибором, уровень нагружения пьезоэлемента 13 определяется сжатием пружины 17. Так фиксируется степень предварительного нагружения датчика осевого давления пишущего узла. Устройство по всем направлениям радиальных перемещений работает идентично, поэтому подробно рассмотрим его работу в направлении одной силочувствительной оси (плоскость чертежа на фиг.5). При перемещении пишущего узла 4 датчика, связанного посредством контакта с плоскостью листа бумаги или любой ровной поверхности при написании произвольного текста, например, в вертикальном направлении, оболочка корпуса 1 упруго изгибается, при этом тензодатчики 6, включенные в силовую схему оболочки и находящиеся в зоне наибольших изгибных деформаций деформируются по-разному, в зависимости от места нахождения датчика на образующей оболочки опорного слоя 11. Тензодатчики 6 реагируют на этот изгиб изменением сопротивления и соответствующим изменением выходного напряжения в измерительной диагонали полумоста, которое регистрируется прибором. При написании текста, в зависимости от особенностей почерка, погружение тензодатчиков 6 изгибных деформаций упругого корпуса 11 и пьезодатчика 13 осевого давления пишущего узла вызывает появление электрических сигналов на входе в электрическую схему устройства. Электрический сигнал по каждому каналу усиливается в многоканальном тензоусилителе 18 типа «Топаз-3(4)» и попадает на вход фильтра 19, в котором подавляются высокочастотные помехи. Электрический сигнал с выхода фильтра подается на вход аналогово-цифрового преобразователя (АЦП) 20, в котором происходит оцифровка полезного сигнала с необходимой дискретностью во времени. Оцифрованный сигнал поступает на микроконтрол-лер21 и далее посредством преобразователя интерфейса (UART/RS-485) 22 на ПЭВМ 23 для создания массива данных в цифровой форме для последующей обработки.
Техническая реализуемость изобретения. Для изготовления корпуса датчика с включенными в его конструкцию датчиками, токопроводящими элементами, контактными группами, выполненными в виде гибкой микросхемы используется следующий технологический процесс [3]. В операциях этого процесса спиральной намоткой на оправку ленты из полимерного материала изготавливается опорный слой 11 корпуса. К примеру, ленту шириной 40 мм и толщиной 0,30 мм из полиэфирной ткани предварительно пропитывают с помощью каландра, валки которого нагреты до температуры 130°C термопластичным полимерным материалом - суспензионным поливинилхлоридом по ГОСТ 14332-78. Перед пропиткой поливинилхлорид нагревают до температуры 120°C и смешивают с 3% диактилфталата по ГОСТ 8729-88 и 0,5% стеарата бария марки С-17 ТУ 6-09-4803-79. Полимерный материал разогревается и после прохождения ленты под прижимным роликом осуществляется сварка соседних, контактирующих витков ленты. Сварку ведут при следующих параметрах - частота ультразвуковых колебаний 23 кГц, мощность - 120 Вт. После навивки и полимеризации опорного слоя 11 корпуса, обеспечивающего необходимую прочность и жесткость производится ручная укладка термопластичной пленки 10 [4], содержащей тензодатчики 6, токопроводящие элементы и контактные группы, прикрепленные к одной из поверхностей пленки 10, выполненной в виде гибкой микросхемы и выравнивающий толщину слой 12. Выравнивающий толщину слой 12 покрывает гибкую пленку 10 вокруг микросхемы, содержащей тензодатчики, токопроводящие элементы и контактные элементы. Слой, содержащий электронные компоненты может, например, включать интегральные схемы, такие как микропроцессоры или микроконтроллеры, катушки, аккумуляторы и др. Толщина пленки, содержащей электронные компоненты, достигает 30-50 мкм. После полимеризации получается многослойная композитная трубка - заготовка корпуса, содержащая необходимые приборные компоненты, монолитизированные в слое корпуса. После этого корпус снимается с оправки и обрабатывается точением. Во внутреннюю полость корпуса вставляют стержень с пишущим узлом, а сам корпус помещается в защитный чехол, который снабжен крышкой. Предлагаемое техническое решение обладает рядом преимуществ, обеспечивающих положительный эффект:
- позволяет создать малогабаритное устройство в виде пишущей ручки;
- позволяет снимать характеристики перемещения пишущего узла при написании рукописного текста для последующей статистической обработки;
- по сравнению с прототипом обладает большей надежностью, так как в монолитном многослойном корпусе датчики защищены от неблагоприятных. условий внешней среды, кроме этого при изготовлении корпуса в его слоях может быть размещено избыточное количество датчиков, которые, при необходимости могут быть перестроены.
Таким образом, в расширении функциональных возможностей устройства за счет избирательного, по всем направлениям пространства, измерения перемещений пишущего узла с их последующей оцифровкой конкретно выражается положительный эффект предлагаемого устройства.
Источники информации
1. Фесенко Е.Г. и др. Новые пьезокерамические материалы. - Ростов на Дону: изд. Ростовского ГУ, 1983. - с.18.
2. Пьезоэлектрический преобразователь (RU №2189668 от 20.09.2002 H01L 41/08).
3. Способ изготовления изогнутых деталей из термопластичного композиционного материала (RU №2431566 от 20.10.2011 B29C 70/50).
4. Ламинирующая пленка со встроенной микросхемой (RU №2429975 от 27.09.2011 B32B 27/04, C08J 5/12, H01L 21/70).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2475842C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПИШУЩЕГО УЗЛА | 2011 |
|
RU2475699C2 |
| РУЧКА ДЛЯ ВВОДА РУКОПИСНОЙ И ГРАФИЧЕСКОЙ ИНФОРМАЦИИ В ЭВМ "SHELPEN" (ВАРИАНТЫ) | 1992 |
|
RU2073907C1 |
| РУЧКА ДЛЯ РУКОПИСНОГО ВВОДА ДАННЫХ В КОМПЬЮТЕР | 2001 |
|
RU2235362C2 |
| РУЧКА ДЛЯ ВВОДА РУКОПИСНОЙ И ГРАФИЧЕСКОЙ ИНФОРМАЦИИ В КОМПЬЮТЕР "SHELPEN III" | 1998 |
|
RU2166796C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2476838C2 |
| Перо для ввода рукописных символов | 1988 |
|
SU1695340A1 |
| Устройство для ввода рукописной информации | 1987 |
|
SU1411790A1 |
| Способ реализации и устройство чувствительного элемента для контроля параметров движения в составе многоуровневого многокристального модуля | 2019 |
|
RU2702401C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
Изобретение относится к измерительной технике, в частности к устройствам для измерения деформаций и перемещений, и предназначено для измерения статических или плавно меняющихся перемещений. Цифровой многокомпонентный датчик перемещений, содержащий корпус, пишущий узел, чувствительный элемент с датчиками перемещений, включенными в электрическую схему, отличающийся тем, что упругий корпус датчика выполнен в виде моноблока из композитного материала путем навивки ленты из термопластичного материала с последующей полимеризацией слоев, с размещением в слоях его тензодатчиков деформаций, токопроводящих элементов и контактных групп, смонтированных в слоях корпуса, вышеуказанный моноблок корпуса имеет следующую структуру слоев, различающихся по выполняемым функциям в составе корпуса, считая снаружи внутрь, защитный слой, защищающий элементы датчика от воздействия внешней среды, выравнивающий толщину слой, содержащий отверстия и углубления под выступающие части последующего слоя, приборный слой, содержащий тензодатчики, токопроводящие элементы и контактные группы, опорный слой, воспринимающий нагрузку при написании рукописного текста, элемент передачи осевого давления пишущего узла выполнен в виде полого стержня с установленным в нем пишущим узлом и соединен торцом с чувствительным элементом, выполненным в виде упругой мембраны, защемленной в корпусе датчика, причем элемент передачи осевого перемещения пишущего узла выполнен в виде шарика, контактирующего с пьезоэлементом, в качестве которого использован пьезоэлемент прямого эффекта перемещений, причем ось чувствительности пьезоэлемента совпадает с продольной осью датчика. Технический результат изобретения заключается в расширении функциональных возможностей устройства за счет избирательного, по всем направлениям, пространства, измерения статических или плавно меняющихся перемещений с их последующей оцифровкой, в частности создание малогабаритного устройства в виде пишущей ручки; снятие характеристики перемещения пишущего узла при написании рукописного текста для последующей статистической обработки; получение большей надежности, так как в монолитном многослойном корпусе датчики защищены от неблагоприятных условий внешней среды, кроме этого, при изготовлении корпуса в его слоях может быть размещено избыточное количество датчиков, которые при необходимости могут быть перестроены. 1 з.п. ф-лы, 6 ил.
1. Цифровой многокомпонентный датчик перемещений, содержащий корпус, пишущий узел, чувствительный элемент с датчиками перемещений, включенными в электрическую схему, отличающийся тем, что упругий корпус датчика выполнен в виде моноблока из композитного материала путем навивки ленты из термопластичного материала с последующей полимеризацией слоев, с размещением в слоях его тензодатчиков деформаций, токопроводящих элементов и контактных групп, смонтированных в слоях корпуса, вышеуказанный моноблок корпуса имеет следующую структуру слоев различающихся по выполняемым функциям в составе корпуса, считая снаружи внутрь, защитный слой, защищающий элементы датчика от воздействия внешней среды, выравнивающий толщину слой, содержащий отверстия и углубления под выступающие части последующего слоя, приборный слой, содержащий тензодатчики, токопроводящие элементы и контактные группы, опорный слой, воспринимающий нагрузку при написании рукописного текста, элемент передачи осевого давления пишущего узла выполнен в виде полого стержня с установленным в нем пишущим узлом и соединен торцом с чувствительным элементом, выполненным в виде упругой мембраны, защемленной в корпусе датчика, причем элемент передачи осевого перемещения пишущего узла выполнен в виде шарика, контактирующего с пьезоэлементом, в качестве которого использован пьезоэлемент прямого эффекта перемещений, причем ось чувствительности пьезоэлемента совпадает с продольной осью датчика.
2. Датчик по п.1, отличающийся тем, что защитный слой корпуса выполнен в виде тонкостенного металлического чехла, скрепленного с композитной оболочкой корпуса и ограничивающего изгибные деформации корпуса.
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2422785C1 |
| Перо для ввода рукописных символов | 1977 |
|
SU638988A1 |
| Устройство для контроля сопротивления изоляции электрических цепей | 1977 |
|
SU868644A1 |

