Изобретение относится к измерительной технике, в частности к устройствам для измерения деформаций и перемещений, и предназначено для измерения статических или плавно меняющихся радиальных перемещений.
Известен «Датчик силы» (SU №1723468 A1, 30.03.1992, G01L 1/22), содержащий корпус с закрепленным в нем упругим элементом, выполненным в виде соосно расположенных колец, соединенных между собой радиальными перемычками, на которых размещены тензодатчики, при этом радиальные перемычки упругих элементов выполнены со встречным углом наклона к центральной оси датчика. Недостатком этой конструкции является взаимовлияние упругих элементов при их совместной деформации, ухудшающее качество датчика по показателю нелинейности.
Наиболее близким к изобретению по технической сущности и достигаемому результату является «Упругий элемент устройства для измерения радиальных давлений» (RU №2293294 C2, 10.02.2007, G01L 1/22), содержащий полое тело цилиндрической формы с расположенными прорезями минимальной ширины, а перемычки между ними представляют собой консольные балки с закрепленными на них тензорезисторами. Недостатками данного технического решения является сложность тарирования датчика, зависимость деформаций упругих элементов от перекоса датчика.
Задачей изобретения является расширение функциональных возможностей устройства за счет непрерывного измерения составляющих радиальных перемещений по всем направлениям.
Задача изобретения решается тем, что многокомпонентный датчик перемещений выполнен следующим образом. Силоприемный элемент выполнен из двух продольно соединенных упругих стержней, соединенных торцами посредством шарового шарнира, на котором размещен элемент передачи усилий в виде шарикоподшипника, установленного внутренним кольцом на силовоспринимающем элементе в зоне наибольшего прогиба, чувствительный элемент выполнен в виде деформируемого внешнего кольца упомянутого шарикоподшипника, расположенного концентрично внутреннему кольцу, на внутренней поверхности деформируемого кольца выполнены окна для размещения пьезоэлементов, причем сепаратор подшипника фиксирован от кольцевого перемещения относительно опорного кольца так, что каждый шарик подшипника соприкасается с рабочей поверхностью пьезоэлемента, так что центры шариков совпадают с направлением радиальных перемещений чувствительного элемента датчика, при этом все пьезоэлементы, расположенные во внешнем кольце чувствительного элемента в области его меньшей жесткости, ориентированы и подключены в электрические схемы таким образом, что выходной сигнал каждой схемы зависит лишь от одной составляющей перемещения, которую измеряет данный канал, а упомянутый силоприемный элемент выполнен из двух стержней разной жесткости, причем первый стержень малой жесткости защемлен в резьбовой втулке корпуса с возможностью осевого перемещения, а второй стержень, с одной стороны, скреплен с первым стержнем с помощью шарового шарнира и посредством контакта с чувствительным элементом с возможностью радиальных перемещений, а с другой стороны, шарнирно закреплен в выходной части корпуса с помощью конической резьбовой втулки.
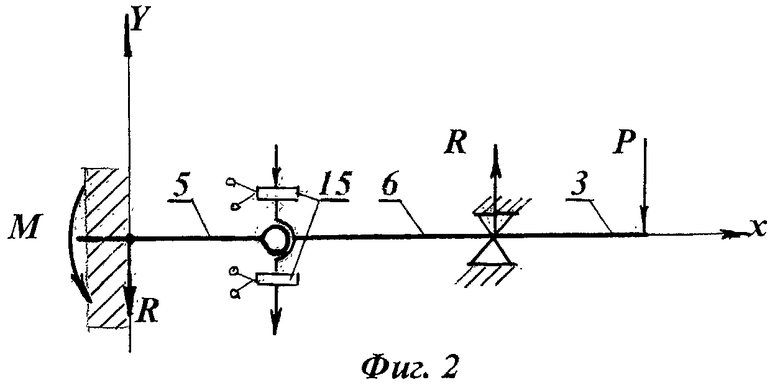
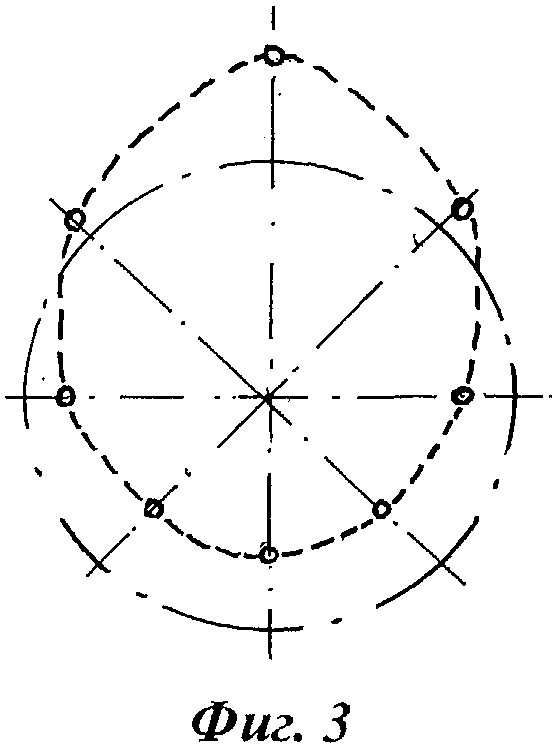
На фиг.1 представлено устройство в разрезе, на фиг.2 - силовая схема датчика, а на фиг.3 - распределение радиальных перемещений при нагружении в направлении оси OY.
Устройство содержит разъемный цилиндрический корпус 1, резьбовую втулку 2, размещенную в торце корпуса с возможностью перемещения вдоль продольной оси корпуса и фиксируемую с помощью стопорной гайки, силоприемный элемент 3, выполненный в виде составного упругого цилиндрического стержня. В своей передней части, контактирующей с силоприемным элементом 3, корпус 1 имеет коническую разрезную втулку 4 для крепления силоприемного элемента 3. Упругий стержень 3 выполнен из двух стержней 5, 6, соединенных торцами с помощью шарового шарнира 7. Первый стержень 5 малой жесткости защемлен в резьбовой втулке 2 корпуса с возможностью осевого перемещения. Его назначение - ограничить прогиб силоприемного элемента 3 в зоне максимального прогиба с целью предотвращения разрушения пьезоэлементов. Второй стержень 6 собственно является силоприемным элементом датчика. В крайней левой части его, в зоне максимальных прогибов на корпусе шарового шарнира 7 размещен элемент передачи усилий к чувствительному элементу в виде шарикоподшипника качения 8, который внутренним опорным кольцом 9 запрессован на левой оконечности стержня 6. Сепаратор 10 подшипника 8 зафиксирован относительно опорного кольца 9. Собственно силопередающим элементом являются шарики 11 подшипника 8, передающие усилие от опорного кольца 9 к чувствительному элементу. Чувствительным элементом датчика является наружное деформируемое кольцо 12 подшипника 8, расположенное концентрично внутреннему опорному кольцу 9. Наружное деформируемое кольцо 12 состоит из внешней тонкостенной металлической втулки 13 и скрепленной с ней посредством контакта обоймы 14, из диэлектрического материала, в которой выполнены сквозные окна для размещения пьезодатчиков перемещения 15.
В качестве датчиков перемещений 15 использованы пьезоэлементы прямого пьезоэффекта [1], включенные в измерительную схему, причем электрическая ось пьезоэлемента совпадает с силочувствительной осью, проходящей через центр каждого шарика 11, точку контакта пьезоэлемента и шарика до пересечения с продольной осью датчика. Пьезодатчики 15 установлены с равным шагом дискретности соосно с шариками 11 в окнах обоймы 14. При преобразовании сигналов перемещения в электрические сигналы применяют способ, основанный на использовании прямого пьезоэффекта, когда сигнал перемещения воздействует на пьезоэлемент и вызывает изменение электрического сигнала на выходе пьезоэлемента [2]. Для этого в конструкции датчика пьезоэлементы предварительно поджаты с помощью винтов 16, а измеряемое перемещение прикладывается через упругий преобразователь, которым является тонкостенная втулка 13. При ввинчивании регулировочного винта 16 его концевая часть прогибает оболочку тонкостенной втулки 13 и создает усилие, пропорциональное перемещению, от этого усилия в зоне соприкосновения шарика 11 и пьезоэлемента 15 возникает усилие предварительного нагружения. С помощью выводов каждый пьезодатчик 15 соединяется с внешней электрической схемой, не показанной на чертеже. Индивидуальная тарировка каждого пьезоэлемента позволяет устранить погрешность измерений из-за технологических погрешностей сборки и отклонения параметров пьезоэлементов.
Устройство работает следующим образом. При закреплении силоприемного элемента 3 в корпусе 1 коническая разрезная втулка 4 и резьбовая втулка 2 обеспечивают совместную деформацию изгиба упругих цилиндрических стержней 5, 6 под действием сил, приложенных к измерительной консоли силоприемного элемента 3 датчика.
Перед началом испытаний датчик тарируется по каждому каналу измерений, для этого каждый пьезодатчик нагружается с помощью регулировочных винтов 16. При ввинчивании винта 16 его концевая часть прогибает оболочку тонкостенной втулки 13 и создает усилие, пропорциональное перемещению, что фиксируется регистрирующим прибором. Датчик по всем направлениям перемещений работает идентично, поэтому рассмотрим его работу в направлении одной из осей. На фиг.2 показан совместный прогиб упругих стержней 5 и 6, передача усилия на пьезодатчики перемещений 15, лежащие в плоскости чертежа. При перемещении иглы силоприемного элемента 3, связанной посредством контакта с исследуемым объектом, в радиальном направлении, например в направлении оси Y (на фиг.2 показано стрелкой), правая консольная часть силоприемного стержня 6 изгибается относительно узла шарнирного закрепления, а элемент передачи усилия в виде подшипника 8 перемещается вверх, при этом усилие через шарик 11 передается на верхний пьезодатчик 15, который сжимается вдоль силочувствительной оси, а нижний пьезодатчик 15 разгружается относительно усилия предварительного нагружения, остальные датчики нагружаются промежуточными усилиями. Нагружение пьезодатчиков 15 вызывает появление электрических сигналов на выходе пьезоэлемента, пропорциональных радиальному перемещению. Максимальный коэффициент преобразования достигается при приложении усилия в направлении силочувствительной оси пьезоэлемента. Электрические сигналы с пьезодатчиков 15 каждого измерительного канала регистрируются и записываются регистрирующим прибором. На диаграмме (фиг.3) показано распределение сигналов при нагружении в направлении оси OY.
Предлагаемое техническое решение обладает рядом преимуществ, обеспечивающих положительный эффект:
- предотвращает выход из строя пьезоэлементов чувствительного элемента, ограничивая радиальные деформации;
- обеспечивает удобство тарировки пьезоэлементов;
- позволяет создать датчик перемещений с малыми габаритами.
Наряду с этим устройство сохраняет положительные свойства прототипа, а именно может быть использовано для измерения перемещений по выбранным направлениям, кроме этого, производит измерение радиальных составляющих перемещений независимо от ориентации датчика в пространстве.
Таким образом, в расширении функциональных возможностей устройства за счет избирательного по всем направлениям пространства измерения радиальных перемещений конкретно выражается положительный эффект предлагаемого устройства.
Литература
1. Фесенко Е.Г. и др. Новые пьезокерамические материалы. - Ростов-на-Дону: Изд. Ростовского ГУ, 1983. - С.18.
2. Джагупов Р.Г., Ерофеев А.А. Пьезокерамические элементы в приборостроении. - Л.: Машиностроение, 1986. - С.185.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПИШУЩЕГО УЗЛА | 2011 |
|
RU2475699C2 |
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2475842C1 |
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2500986C2 |
| Тензометрический датчик сил | 1978 |
|
SU714188A1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2422785C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА (ВАРИАНТЫ) | 2006 |
|
RU2326802C1 |
| СТРУННЫЙ ДАТЧИК СИЛЫ | 1992 |
|
RU2042121C1 |
| СИЛОМЕТРИЧЕСКАЯ ПЛАТФОРМА | 1999 |
|
RU2185094C2 |
Изобретение относится к измерительной технике, в частности к устройствам для измерения деформаций и перемещений, и предназначено для измерения статических или плавно меняющихся радиальных перемещений. Многокомпонентный датчик перемещений содержит корпус, чувствительный элемент с пьезодатчиками. Силоприемный элемент выполнен из двух продольно соединенных упругих стержней, соединенных торцами посредством шарового шарнира, на котором размещен элемент передачи усилий в виде шарикоподшипника, установленного внутренним кольцом на силовоспринимающем элементе в зоне наибольшего прогиба, чувствительный элемент выполнен в виде деформируемого внешнего кольца упомянутого подшипника, расположенного концентрично внутреннему кольцу. На внутренней поверхности деформируемого кольца выполнены окна для размещения пьезоэлементов, а сепаратор подшипника фиксирован от кольцевого перемещения относительно опорного кольца так, что каждый шарик подшипника соприкасается с рабочей поверхностью пьезоэлемента, так что центры шариков совпадают с направлением радиальных перемещений чувствительного элемента датчика. Техническим результатом, достигаемым от реализации заявленного изобретения, является расширение функциональных возможностей устройства. 3 ил.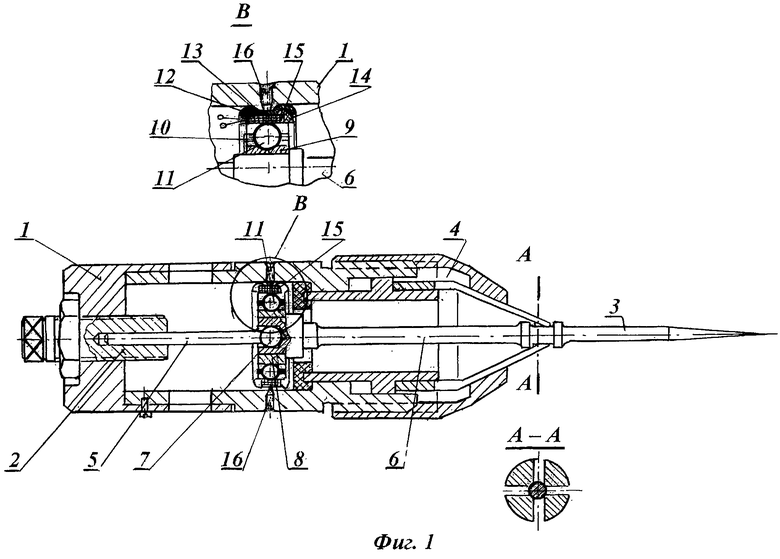
Многокомпонентный датчик перемещений, содержащий корпус, силоприемный элемент, чувствительный элемент с пьезодатчиками, отличающийся тем, что силоприемный элемент выполнен из двух продольно соединенных упругих стержней, соединенных торцами посредством шарового шарнира, на котором размещен элемент передачи усилий в виде шарикоподшипника, установленного внутренним кольцом на силовоспринимающем элементе в зоне наибольшего прогиба, чувствительный элемент выполнен в виде деформируемого внешнего кольца упомянутого шарикоподшипника, расположенного концентрично внутреннему кольцу, на внутренней поверхности деформируемого кольца выполнены окна для размещения пьезоэлементов, причем сепаратор подшипника фиксирован от кольцевого перемещения относительно опорного кольца так, что каждый шарик подшипника соприкасается с рабочей поверхностью пьезоэлемента, так что центры шариков совпадают с направлением радиальных перемещений чувствительного элемента датчика, при этом все пьезоэлементы, расположенные во внешнем кольце чувствительного элемента в области его меньшей жесткости, ориентированы и подключены в электрические схемы таким образом, что выходной сигнал каждой схемы зависит лишь от одной составляющей перемещения, которую измеряет данный канал, а упомянутый силоприемный элемент выполнен из двух стержней разной жесткости, причем первый стержень малой жесткости защемлен в резьбовой втулке корпуса с возможностью осевого перемещения, а второй стержень с одной стороны скреплен с первым стержнем с помощью шарового шарнира и посредством контакта с чувствительным элементом с возможностью радиальных перемещений, а с другой стороны шарнирно закреплен в выходной части корпуса с помощью резьбовой конической втулки.
| Датчик силы | 1990 |
|
SU1723468A1 |
| УПРУГИЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ДАВЛЕНИЙ | 2005 |
|
RU2293294C2 |
| RU 2003106298 A, 10.09.2004. | |||

