Область изобретения относится к спутниковым навигационным системам, а более конкретно к области техники, предоставляющей пользователю средства доверия к информации о коррекции ошибки, поступающей от спутниковой системы.
Под термином “спутниковая навигационная система” подразумевается в настоящем описании любая система, обеспечивающая навигацию в широкой зоне, например, такая, как существующие системы GNSS (“Глобальная навигационная спутниковая система”), носящие название GPS, ГЛОНАСС или создаваемая система GALILEO, а также и все эквивалентные им и построенные на их базе.
Специалистам хорошо известен принцип определения местоположения спутниковых навигационных систем. Так, например, в системе GPS, сигнал радиочастоты, испускаемый спутником, кодируется и время, необходимое этому сигналу для достижения им приемника, местоположение которого необходимо определить, используется для определения расстояния между указанным спутником и этим приемником, предпочтительно называемого псевдо-расстоянием.
Для улучшения существующих спутниковых систем относительно точности, целостности, непрерывности, а также их эксплуатационной готовности, используются так называемые вспомогательные системы. Характеристика целостности имеет особое значение, так как она определяет собой работу систем, от которых зависит безопасность пользователей. Европейская вспомогательная спутниковая система EGNOS улучшает характеристику двух спутниковых систем GPS и GLONASS. Она передает пользователю сообщения целостности, которые позволяют ему оценить насколько он может доверять координатам своего местоположения и в итоге позволяют ему принять соответствующее решение. Система EGNOS передает, в виде стандартных отклонений, корректировки псевдо-расстояний и их уточнения и корректирует:
- погрешности, связанные с прохождением в ионосфере и тропосфере электромагнитных волн;
- погрешности, связанные с спутниками GPS и геостационарными спутниками (медленные корректировки: орбитальные погрешности и часовые погрешности);
- быстро изменяющиеся погрешности, такие как часовые, обусловленные селективным доступом -Selective Availability SA-(быстрые корректировки).
Можно привести в качестве рассчитанных данных по погрешностям в определении псевдо-расстояния данные, именуемые по-английски сокращенно SREW: “Satellite residual Error for the Worst User Location”. Эти данные представляют собой орбитальную и часовую погрешности спутника для наименее благополучного пользователя в зоне обслуживания. Данные, именуемые по-английски сокращенно UDRE ("User Differential Range Error") представляют собой мажорантную оценку данных SREW. Можно привести также ионосферные погрешности, именуемые по-английски сокращенно GIVD “Grid Ionospheric Vertical Delay”. Ионосферный слой был поделен посредством сетки на отдельные участки. Для каждой точки указанной сетки, передается оценка соответствующей ей ионосферной задержки. Пользователь, измерение которого маловероятно определить точно в указанной точке сетки, должен произвести интерполяцию величин, предоставляемых ему для каждой из 4 точек сетки, соседних по отношению к точке, в которой было определено местоположение пользователя. В то же время пользователь не обязательно увидит спутник вертикально, но, скорее всего, это будет наклонный замер.
Продолжают действовать только те источники погрешностей, которые связаны с приемником (часовая погрешность, эксцентриситет, многочисленные маршруты). Пользователь рассчитывает затем свое «вспомогательное» положение то есть, то положение, которое улучшено в результате корректировок псевдо-расстояния. Точность этого положения оценивается путем его сравнения с опорным положением. Корректировки псевдо-расстояния позволяют пользователю рассчитывать в реальном времени точность своего положения, посредством распространения погрешности. В гражданской авиации устанавливают, например, исходя из точности положения, уровни защиты. Эти уровни представляют собой интервалы строгого доверия. Указанные уровни защиты не должны превышать аварийного уровня, предусмотренного для фазы полета. Целостность, эксплуатационная готовность и непрерывность действия навигационной системы оцениваются по погрешности положения, уровням защиты и уровням тревоги.
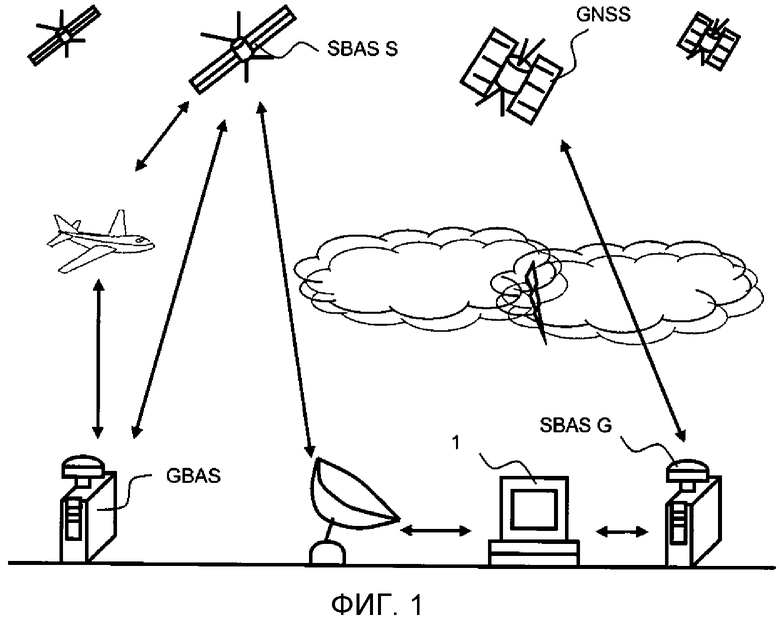
На фиг. 1 показаны структура спутниковой навигационной системы, содержащей систему GNSS дифференциального позиционирования и вспомогательные системы SBAS (“Satellite Based Augmentation System”) и GBAS (“Ground Based Augmentation System”). Летательные аппараты имеют на борту приемники, связанные со вспомогательными системами.
EGNOS представляет собой систему типа SBAS, содержащую наземную инфраструктуру SBAS G и геостационарные спутники SBAS S. Наземная инфраструктура включает в себя большое число наземных приемных станций, распределенных в широкой географической зоне, которые получают данные от спутников GNSS и определяют псевдо-расстояния, а также центральную станцию 1 контроля и обработки, которая на основании псевдо-расстояний, переданных приемными станциями SBAS G, определяет корректировки и целостность, которые сгруппированы в сигнале SBAS. Геостационарные спутники транслируют этот сигнал от центральной станции к приемникам летательных аппаратов.
Система GBAS содержит наземные радиомаяки, предназначенные для удовлетворения местных потребностей, в том случае, если необходима более высокая точность определения в заданном радиусе действия. Указанные наземные радиомаяки расположены, например, в зонах аэропорта. Система GBAS содержит также приемники, устанавливаемые на борту летательных аппаратов. Система GNSS выдает летательным аппаратам и наземным радиомаякам информацию для расчета псевдо-расстояний. Наземный радиомаяк выдает для каждого спутника GNSS, находящегося в зоне видимости, информацию о корректировке псевдо-расстояний и информацию о целостности дифференциального позиционирования. Радиомаяки GBAS выдают более точные корректировки по сравнению с корректировками центральной станции SBAS. Кроме того, радиомаяки GBAS находятся под контролем службы воздушного контроля, которая может, таким образом, контролировать передачу указанными радиомаяками в соответствии с требующимися целостностью и точностью положения.
Известно большое число способов выявления нарушения целостности спутниковых систем, но, ни один из них не способен предоставить индикацию целостности системы в реальном времени для событий очень низкой вероятности, то есть, вероятности порядка 10-7. В качестве примера можно привести патент US 7,089,452 B2, в котором описана техника оценки целостности спутниковой системы GPS, основанной на применении средства оценки, использующего технику моментов. Современные технологии способны лишь определять, соблюдают или нет спутниковые системы условия сертификации. Они выполняют лишь апостериори контроль уровня целостности системы. Основным недостатком этого типа решения является то, что оператор имеет возможность только дезактивировать систему, как только будет пройден определенный критический порог. Эти технологии не позволяют контролировать эволюцию состояния целостности спутниковой навигационной системы и в итоге предвидеть аварийную ситуацию.
Известно, что спутниковые системы, работающие со вспомогательными системами, способны отвечать техническим требованиям для событий очень низкой вероятности. Эти проверки проводились на стадии разработки с применением трудоемких и монотонных способов. Причем на стадии применения систем было уже невозможно вновь провести эти проверки. При использовании современных технологий для выполнения этих проверок потребуется провести измерения, продолжительность тестирования которых будет стремиться к бесконечности. В самом деле, при выполнении измерений запасов целостности методами классической инферентной статистики, последняя пытается смоделировать поведение случайной переменной в доступной наблюдению области реализаций. Для получения релевантной статистики необходимо получить достаточно декоррелированные данные с тем, чтобы не производить измерение излишней информации. Считаем, что необходимо выполнять дискретизацию с интервалом, равным приблизительно 5 минутам между каждым измерением. А принимая во внимание низкую вероятность событий, которые необходимо обнаружить, это потребует собрать миллиарды образцов на протяжении тысяч лет измерений.
Кроме того, спутниковые системы были сертифицированы на уровне целостности, соответствующем 10-7, для передачи информации в комплекс спутниковой системы и в отдельную систему. Современные технологии не позволяют производить измерение целостности на уровне 10-7 для всего комплекса жизненного цикла спутниковой системы и не учитывают влияние возмущающих факторов, сопутствующих каждому определению местоположения.
Изобретение имеет, таким образом, целью улучшить технологию контроля навигационных систем для индикаций целостности относительно событий очень низкой вероятности с тем, чтобы лучше проводить оценку запаса целостности в соответствии со строгими техническими требованиями и в частности в случае систем, применяющихся в авиационной промышленности.
Более конкретно изобретение относится к вычислительному устройству, предоставляющему средства оценки индикации целостности спутниковой навигационной системы, отличающемуся тем, что оно содержит средства оценки в реальном времени, путем измерения данных, рассчитанных навигационной системой, индикации целостности системы относительно погрешностей определения местоположения очень низкой вероятности, причем указанные средства содержат:
- средство приема данных, рассчитанных системой определения местоположения,
- средство оценки модели распределения погрешностей определения местоположения,
- средство оценки параметров, характеризующих модель распределения,
- вычислительное средство, применяющее теорию экстремальных величин в зависимости от параметров, характеризующих модель распределения, позволяющее смоделировать распределение погрешностей определения местоположения очень низкой вероятности,
-средство оценки в реальном времени индикации целостности для погрешностей определения местоположения очень низкой вероятности,
- средство передачи в реальном времени индикации целостности.
Изобретение дает решение проблемы оценки запаса целостности спутниковой навигационной системы для событий выхода из строя очень низкой вероятности. Изобретение предлагает подход, отличный от решений, основанных на использовании инферентных статистических методов, ввиду того, что с их помощью нельзя выдавать индикацию в реальном времени о событиях низкой вероятности. Под термином «событие низкой вероятности» понимаются погрешности положения, вероятность появления которых должна быть ниже 10-7 для периода, продолжительностью в 150 секунд. Анализ экстремальных событий значительно отличается от классической инферентной статистики уже в силу самой природы изучаемых переменных. В самом деле, последняя пытается предсказать поведение “в хвосте распределения”. Распределение же экстремальных величин происходит, как известно, асимптотически и аппроксимация с помощью асимптотического закона представляется эффективной. Используя распределение элементов в наблюдаемой области, можно смоделировать в реальном времени распределение элементов хвоста, принадлежащих области очень низкой вероятности появления, и квалифицировать таким образом запас целостности. Изобретение предоставляет средство оценки в реальном времени эволюции характеристик спутниковой навигационной системы. Таким образом, имеется возможность предсказать ухудшение характеристик системы и в конечном результате предвосхитить случаи выхода из строя.
Изобретение и другие его преимущества можно будет лучше понять после ознакомления с нижеследующим описанием, не носящем ограничительного характера, приведенным с приложением фигур, среди которых:
На фиг. 1 представлена структура спутниковой навигационной системы со вспомогательной системой. На ней показаны два типа вспомогательных систем предоставляющих индикации целостности спутниковой навигационной системы: космический сегмент типа SBAS, как, например, EGNOS, и наземный сегмент типа GBAS.
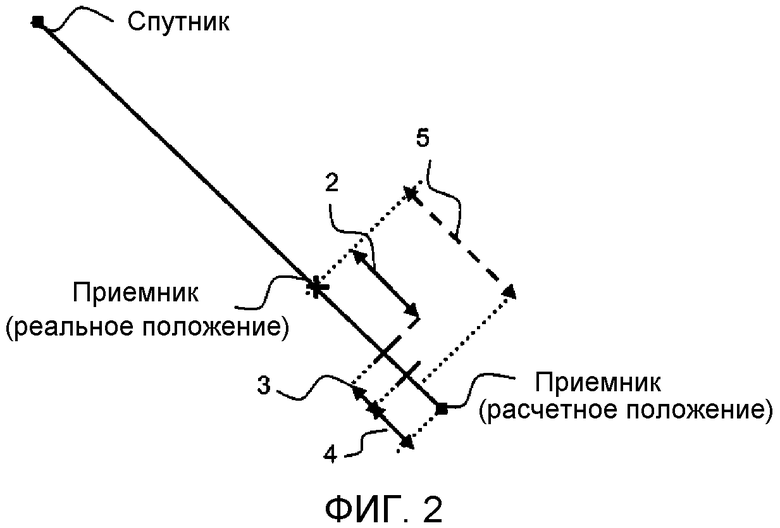
На фиг. 2 представлен принцип определения информации о целостности спутниковой навигационной системы, использующей в качестве исходных данных данные псевдо-расстояния.
На фиг. 3 представлено распределение остаточных погрешностей, наблюдаемых в расчетах положения спутниковой навигационной системы. Хвост распределения представляет остаточные погрешности очень низкой вероятности и он смоделирован путем применения теории экстремальных величин к оцениваемой модели распределения.
Изобретение, как это показано на фиг. 1, относится к счетным устройствам, предоставляющим индикации целостности спутниковой навигационной системы. Изобретение предназначено, в частности, для наземной станции расчета типа GBAS спутниковой навигационной системы, снабженной вспомогательной системой, которая в частности применяется в аэропортах, но может применяться и на станциях контроля и обработки вспомогательных систем типа SBAS.
Станция расчета целостности навигационной системы содержит средство измерения остаточной погрешности положения, рассчитанной навигационной системой. Исходные данные для выполнения расчета индикации целостности могут поступать:
- из области положений, использующей погрешности положений, нормализованных радиусом уровней защиты;
- из области псевдо-расстояний, использующей корректировки погрешности, рассчитанные центральной станцией контроля и обработки.
На фиг. 2 схематически представлен принцип определения величины погрешности положения. В качестве примера, не носящего ограничительного характера, станция расчета целостности согласно изобретению содержит приемники радиочастотных сигналов дифференциального позиционирования спутниковой системы, причем указанные приемники определяют расчетное положение станции. Станция расчета содержит также приемник, в который поступает величина корректировок 3 и 4, что позволяет определить, таким образом, величину скорректированного положения станции. Станция расчета содержит также средство хранения, хранящее величину реального положения станции расчета, величину, определенную техническими геодезическими средствами. Вычислитель рассчитывает, таким образом, разницу между реальным и расчетным положением станции. Указанная разница 2 носит название “остатка” и позволяет определить целостность навигационной системы. Пороговая величина целостности 5 определена и вероятность того, что эта пороговая величина целостности 5 окажется ниже остатка 2 должна быть ниже уровня 10-7.
Станция расчета, согласно изобретению, содержит вычислительное средство, позволяющее оценить распределение остатков, измеренных в реальном времени. На основании указанного распределения получают параметры, которые затем используются вычислительным средством для применения теории экстремальных величин. В качестве примера, не носящего ограничительного характера, как это показано на фиг. 3, используется модель распределения в виде гауссового распределения. Изобретение не ограничивается исключительно этим средством оценки и в различных адаптированных способах применения изобретения могут использоваться и другие средства оценки. Специалистам в рассматриваемой области техники известны средства оценки типа Pickands, методика максимума правдоподобия или метод моментов. Параметры, используемые впоследствии для применения теории экстремальных величин, зависят от конкретной используемой модели распределения.
Изобретение относится также к способу, позволяющему оценить индикацию целостности навигационной системы, отличающемуся тем, что в нем используется устройство, согласно изобретению, для выполнения следующих этапов в реальном времени, чтобы оценить индикацию целостности системы относительно погрешностей определения местоположения х, которые должны быть очень низкой вероятности:
- измерение данных x, рассчитанных системой определения местоположения,
- расчет модели распределения H погрешностей расчета определения местоположения x системы,
- определение параметров (a, b, c) , характеризующих модель распределения H, где “a” - параметр, определяющий самую вероятную величину распределения , “b” - параметр, указывающий на разброс экстремальных значений, а “с” - параметр, указывающий на значимость экстремальных значений в распределении,
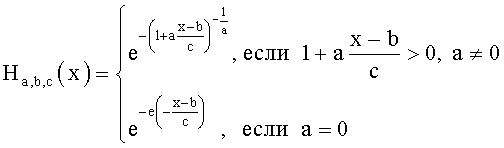
- моделирование в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от параметров (a, b, c), применяемых в теории экстремальных величин следующим образом:
- сравнение в реальном времени распределения погрешностей определения местоположения с порогом допуска 22 , позволяющего выдавать индикацию целостности,
- передача в реальном времени индикации целостности 11 системы определения местоположения.
Надежность моделирования хвоста распределения зависит от параметров a, b и c. Указанные параметры поступают от средства оценки, определяющего модель распределения исходных данных, где “x” - представляет собой исходные данные и соответствует измерениям погрешности определения местоположения. Параметр “a” представляет собой параметр определения местоположения и он непосредственно связан с самой вероятной величиной закона; он указывает, таким образом, приблизительно где находится центр распределения. Параметр “b” представляет собой - параметр разброса; он указывает разброс экстремальных значений. Параметр “c” носит название показателя разброса. Чем больше этот показатель по своей абсолютной величине, тем выше значимость экстремальных значений в первоначальном распределении. Указанный параметр представляет собой основной индикатор поведения хвоста распределения, и когда:
-c>0: область соответствует распределению Фреше, то есть распределению неограниченных значений x и затуханию типа полиномиального;
- c=0: область соответствует распределению Гамбела, то есть, распределению x , представляющему затухание типа по экспоненте в хвосте распределения;
- c<0: область соответствует распределению Вейбулла, то есть, распределению ограниченных значений x.
Согласно первому способу реализации изобретения измеряют погрешности положения по отношению к опорному положению для того, чтобы рассчитать модель распределения погрешностей расчета определения местоположения системы.
Согласно второму способу реализации изобретения, измеряют погрешности псевдо-расстояний по отношению к реальному расстоянию для того, чтобы рассчитать модель распределения погрешностей расчета определения местоположения системы.
Исходные данные для расчета индикации целостности могут поступать из любой навигационной системы, а также из любой связанной с ней вспомогательной системы. Изобретение позволяет выдавать в реальном времени индикацию целостности для событий очень низкой вероятности, базирующуюся на данных, переданных в реальном времени, и не базирующуюся на данных, полученных в результате анализов системы в какой-то момент времени и в конкретных условиях. Информация о целостности для вероятности 10-7 также не базируется на данных, определенных в период разработки системы для какой-то конкретной структуры. Преимуществом изобретения является то, что оно выдает индикацию целостности независимо от рассматриваемой спутниковой навигационной системы.
Преимуществом изобретения является то, что средство приема станции расчета индикации целостности измеряет в реальном времени данные, рассчитанные навигационной системой таким образом, что образцы оказываются достаточно декоррелированными для того, измерять отчетливые данные. В самом деле, необходимо, чтобы частота дискретизации данных была достаточно распределена во времени с тем, чтобы совокупность дискретов была репрезентативной. Методы классической инферентной статистики не позволяют измерять остатки очень низкой вероятности, которые мы как раз и стремимся обнаружить и это по причине их очень низкой вероятности появления.
Преимуществом изобретения является то, что моделируют в реальном времени запас между расчетной остаточной погрешностью и допустимой остаточной погрешностью при очень низкой вероятности появления, то есть вероятности, равной приблизительно 10-7. Как это показано на фиг. 3, номером 21 обозначена на оси абсцисс остаточная погрешность, оцениваемая с вероятностью 10-7. Цифрой 22 обозначена порог допуска целостности. Для применений в авиации, необходимо, чтобы вероятность того, что “22 ниже x” то есть “P(22<x)<10-7”, была ниже 10-7. Заштрихованная зона представляет собой “P(21<x)” и меньше 10-7 и из этого, таким образом, следует, что “P(22<x)<10-7”. При уровне целостности системы, соответствующем 10-7, соблюдается порог допуска 22 и промежуток 11 между 21 и 22 представляет собой запас целостности. Современные технологии не позволяют предоставлять в реальном времени для событий очень низкой вероятности указанную индикацию целостности. Их возможности ограничиваются только апостериорной индикацией превышении порога. Индикация запаса целостности, согласно изобретению, может оказаться полезной в применениях в авиации, и в частности, при оценке степени доверия в навигационной системе на этапах захода на посадку, когда погрешность становится критичной. Изобретение особенно предназначена для использования в наземных станциях типа GBAS, установленных в зонах аэропортов, но оно может найти свое применение вообще в любой системе расчета целостности спутниковой навигационной системы.
Согласно другому способу представления индикации целостности, моделируют в реальном времени остаточную погрешность 22 расчета позиционирования системы с очень низкой вероятностью появления, то есть порядка 10-7 и передают в реальном времени величину остаточной погрешности. Индикация целостности может представляться в виде абсолютной величины остатка для событий очень низкой вероятности. Как это показано на фиг. 3, цифрой 21 обозначается остаточная погрешность на уровне 10-7, а цифрой 22 - порог допуска. 21 меньше 22, таким образом, система демонстрирует целостность.
Изобретение предназначается в частности для наземной станции расчета типа GBAS спутниковой навигационной системы, снабженной вспомогательной системой, реализующей способ согласно изобретению.
Изобретение относится к области радиотехники, а именно к спутниковым навигационным системам, и может быть использовано для предоставления средства оценки индикации целостности (11) спутниковой навигационной системы. Технический результат заключается в решении проблемы оценки запаса целостности спутниковой навигационной системы для событий выхода из строя очень низкой вероятности, ниже или равной приблизительно 10-7. Для этого, чтобы оценить индикацию целостности (11) системы относительно погрешностей определения местоположения (2), которые должны быть очень низкой вероятности, ниже или равной приблизительно 10-7, реализуют в реальном времени этапы: измерения данных, рассчитанных системой; расчета модели распределения Н погрешностей расчета определения местоположения (2) системы; определения параметров, характеризующих модель распределения (H); моделирования в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от упомянутых параметров, применяемых в теории экстремальных чисел; сравнения в реальном времени распределения погрешностей определения местоположения с порогом допуска, позволяющим представить индикацию целостности; и передачи в реальном времени индикации целостности (11) системы. 2 н. и 5 з.п. ф-лы, 3 ил.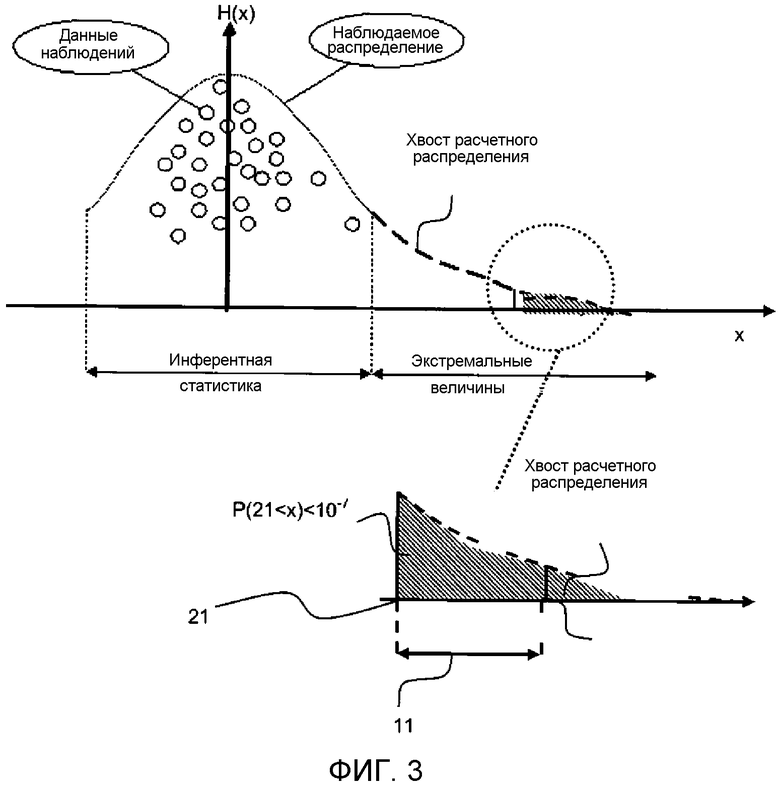
1. Способ оценки индикации целостности спутниковой навигационной системы, предоставляющий средства оценки индикации целостности спутниковой навигационной системы, отличающийся тем, что он реализует следующие этапы в реальном времени, чтобы оценить индикацию целостности (11) системы относительно погрешностей определения местоположения (2), которые должны быть очень низкой вероятности, ниже или равной приблизительно 10-7:
измерение данных, рассчитанных системой,
расчет модели распределения Н погрешностей расчета определения местоположения (2) системы,
определение параметров (a, b, c), характеризующих модель распределения (H), где "a" - параметр, определяющий самую вероятную величину распределения, "b" - параметр, указывающий на разброс экстремальных значений, а "c" - параметр, указывающий на значимость экстремальных значений в распределении,
моделирование в области вероятностей хвоста распределения H(x) вычислительным средством в зависимости от параметров (a, b, c), применяемых в теории экстремальных чисел следующим образом:
сравнение в реальном времени распределения погрешностей определения местоположения с порогом допуска, позволяющим представить индикацию целостности,
передача в реальном времени индикации целостности (11) системы.
2. Способ согласно п.1, отличающийся тем, что измеряют погрешности положения относительно опорного положения для расчета модели распределения погрешностей расчета определения местоположения системы.
3. Способ согласно п.1, отличающийся тем, что измеряют погрешности псевдо-расстояний относительно реального расстояния для расчета модели распределения погрешностей расчета определения местоположения системы.
4. Способ согласно п.2, отличающийся тем, что измеряют в реальном времени данные, рассчитанные навигационной системой таким образом, что дискреты оказываются достаточно декоррелированными для того, чтобы измерить остатки очень низкой вероятности, ниже или равной приблизительно 10-7.
5. Способ согласно п.1, отличающийся тем, что моделируют в реальном времени запас (11) между расчетной остаточной погрешностью (21) и остаточной допустимой погрешностью (22) с очень низкой вероятностью, ниже или равной приблизительно 10-7, появления.
6. Способ согласно п.1, отличающийся тем, что моделируют в реальном времени остаточную погрешность (21) расчета позиционирования системы с очень низкой вероятностью, ниже или равной приблизительно 10-7, появления.
7. Наземная станция расчета спутниковой навигационной системы, отличающаяся тем, что она реализует способ согласно п.1.
| Rife J | |||
| и др | |||
| Core Overbounding and its Implications for LAAS Integrity, ION GPS/GNSS, XX, XX, 21.09.2004, c.2810-2821 | |||
| RU 13104 U1, 20.03.2000 | |||
| US 2005015680 A1, 20.01.2005 | |||
| Kannemans H | |||
| "An integrity, availability and continuity test method for EGNOS/WAAS", Vliegproeven en Instrumentatiesystemen Satellietnavigatie, Сентябрь 2007 | |||
| US 6373432 B1, 16.04.2002. |

