Изобретение относится к области навигации и топопривязки, в частности к способам инерциально-спутниковой навигации и определения топогеодезических данных, и предназначено для определения навигационно-топогеодезических параметров для наземных подвижных объектов.
Известен способ определения параметров навигации (см. патент №2338160 С1, G01С 23/00, опубл. 10.11.2008 г.), принятый за прототип. Способ заключается в осуществлении комплексирования сигналов спутниковой и инерциальной навигационных систем. Определяют скорректированные параметры навигации и величины ошибок значений, вырабатываемых инерциальной навигационной системой. Осуществляют передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ею в последующие моменты времени параметров навигации. Комплексирование осуществляют на основе информации от одного навигационного спутника. Находят скорректированные параметры навигации, а разницу между текущими параметрами навигации, вырабатываемыми инерциальной навигационной системой и скорректированными значениями параметров навигации, принимают за величины ошибок инерциальной навигационной системы.
Недостатками прототипа являются:
- отсутствие возможности работы в полях различных космических навигационных систем;
- недостаточная точность и надежность работы навигационной системы, не обеспечивающей доступность, непрерывность и целостность навигационных определений по сигналам навигационных космических аппаратов;
- отсутствие возможности использования сигналов различных космических навигационных систем в совместном режиме и в режиме селективного доступа;
- отсутствие возможности коррекции навигационной информации, поступающей от навигационных космических аппаратов;
- отсутствие возможности выдачи параметров навигации, топопривязки и корректирующей информации от навигационных космических аппаратов внешним потребителям;
- отсутствие возможности работы навигационной системы, реализующей данный способ, в режиме опорной контрольно-корректирующей станции;
- отсутствие информации по определению высоты точек местности на маршруте подвижного объекта относительно исходного пункта маршрута движения с известным значением высоты над уровнем моря;
- отсутствие возможности автоматической прокладки маршрута по заданным точкам, выбираемым с учетом рельефа местности, погодных условий, времени года и суток;
- отсутствие четкого алгоритма работы системы навигации в целом;
- низкий уровень автоматизации принятия решений аппаратурой навигационной системы, реализующей данный способ;
- отсутствие возможности реализации сервисных задач.
Предлагаемым изобретением решается задача по повышению точности и эффективности системы инерциально-спутниковой навигации и расширению ее функциональных возможностей.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа автоматизированного определения навигационно-топогеодезических параметров, обеспечивающего автоматизированный режим определения и регистрации выходных навигационных данных в соответствии с алгоритмом функционирования системы в целом, возможность совместного и селективного режимов работы в полях различных космических навигационных систем, достижение высокой точности и надежности с учетом информации по определению высоты точек местности на маршруте за счет доступности, непрерывности обслуживания и целостности навигационных определений по сигналам навигационных космических аппаратов, коррекцию навигационной информации, поступающей от навигационных космических аппаратов, в режиме опорной контрольно-корректирующей станции, реализацию сервисных задач по топогеодезическому обеспечению и выдачу выходных параметров навигации и корректирующей информации от навигационных космических аппаратов внешним потребителям.
Указанный технический результат достигается тем, что в предлагаемом способе автоматизированного определения навигационно-топогеодезических параметров, включающем получение информации о параметрах навигации от инерциальной и спутниковой навигационных систем, комплексирование сигналов спутниковой и инерциальной навигационных систем, в результате которого находят скорректированные параметры навигации и величины ошибок значений, вырабатываемых инерциальной навигационной системой, передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ей в последующие моменты времени параметров навигации, новым является то, что прием спутниковой навигационной информации осуществляется путем совместного или селективного режимов работы в полях различных космических навигационных систем, комплексирование проводится с учетом информации о параметрах высоты точек местности на маршруте подвижного объекта, одновременно в инерциальной навигационной системе проводится коррекция навигационной информации, поступающей от навигационных космических аппаратов, выполняемая в режиме опорной контрольно-корректирующей станции, имеющей собственное программно-математическое обеспечение, реализация способа осуществляется в автоматизированном режиме в соответствии с алгоритмом функционирования (специальным программным обеспечением), охватывающим все элементы системы в целом, выполненным с возможностью осуществления автоматической прокладки маршрута по заданным точкам, реализации сервисных задач по топогеодезическому обеспечению и выдачи выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных.
Обеспечение приема спутниковой навигационной информации путем совместного или селективного режимов работы в полях различных космических навигационных систем позволяет:
- производить автоматическое определение (расчет) трех текущих координат местоположения, вектора путевой скорости, азимута движения подвижного объекта, дирекционного угла и текущего времени;
- вести автоматический поиск, прием и обработку радиосигналов, излучаемых навигационными космическими аппаратами:
1) космической навигационной системы ГЛОНАСС;
2) космической навигационной системы GPS;
3) по совмещенной группировке навигационных космических аппаратов этих систем;
- вести автоматическую работу одновременно по радиосигналам 12 навигационных космических аппаратов (ГЛОНАСС и/или GPS);
- вести автоматический прием, хранение, обновление альманахов систем ГЛОНАСС и GPS;
- получать отображение текущих координат местоположения в виде геодезических эллипсоидальных (В, L, Н) или в виде плоских прямоугольных в проекции Гаусса-Крюгера;
- в зависимости от качества данных по той или иной навигационной системе автоматически выбирать режим работы;
- за счет совместного использования GPS и ГЛОНАСС:
1) фактически увеличить суммарное количество видимых спутников, расширить зону перекрытия навигационным сигналом;
2) т.к. GPS и ГЛОНАСС работают в разных частотных диапазонах, повысить устойчивость совместного приемника к вероятному узкочастотному глушению навигационного сигнала;
3) обеспечить доступность, непрерывность обслуживания и целостность навигационных определений по сигналам навигационных космических аппаратов;
- в конечном итоге повысить точность и надежность навигационных определений, в т.ч. в экстремальных ситуациях.
Проведение комплексирования поступающей навигационной информации с учетом информации о параметрах высоты точек местности на маршруте подвижного объекта позволяет:
- производить автоматическое определение высоты точек местности на маршруте относительно исходного (начального) пункта маршрута;
- использовать полученную информацию для получения окончательных навигационных и топогеодезических параметров;
- повысить точностные характеристики окончательной навигационной информации.
Осуществление коррекции навигационной информации, поступающей от навигационных космических аппаратов, выполняемой в режиме опорной контрольно-корректирующей станции, позволяет:
- вести измерение по всем видимым навигационным космическим аппаратам ГЛОНАСС и GPS разности между моментом приема фрагмента сигнала, отсчитанным по шкале времени приемника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженной на скорость света (псевдодальностей) с их временной привязкой к системной шкале ГЛОНАСС (GPS);
- вести непрерывный мониторинг целостности систем ГЛОНАСС и GPS (контроль качества их навигационных полей);
- вести формирование, регистрацию и выдачу потребителю информации о качестве навигационных полей и качестве корректирующей информации;
- в конечном итоге повысить точность и надежность навигационных определений.
Собственное программно-математическое обеспечение опорно-корректирующей станции позволяет:
- осуществлять управление составными частями опорно-корректирующей станции;
- в соответствии с программой расчета видимости отображать в графическом и цифровом виде параметры навигационных спутниковых систем для планирования возможных навигационных сеансов и расчета зон видимости каждого отдельного навигационного космического аппарата;
- в соответствии с программой апостериорной обработки производить вычисление оценки местоположения опорно-корректирующей станции.
Реализация способа в автоматизированном режиме в соответствии с алгоритмом функционирования (специальным программным обеспечением), охватывающим все элементы системы в целом, позволяет:
- обеспечить автоматический прием и обработку навигационной информации, поступающей от инерциальной и спутниковой навигационных систем, комплексирование их сигналов, получение скорректированных параметров навигации и величины ошибок, передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ею в последующие моменты времени параметров навигации;
- обеспечить работу с геодезической информационной системой "Интеграция", позволяющей работать с цифровой картой местности и осуществлять автоматическую прокладку маршрута по заданным точкам;
- осуществить координацию работы всех систем, контроль технического состояния, режим технического обслуживания и автоматический обмен информацией с потребителями по автономному каналу передачи данных;
- исключить в максимальной мере влияние «человеческого фактора» на получение окончательных навигационных параметров;
- обеспечить архивирование всей получаемой и обработанной информации.
Осуществление по данному способу автоматической прокладки маршрута по заданным точкам позволяет:
- обеспечить для предварительной оценки предполагаемого маршрута просмотр установленных цифровых карт местности;
- определить местоположение (координаты и высоту) подвижного объекта по цифровой карте местности и выбрать маршрут движения;
- определить координаты любой точки на цифровой карте местности;
- определить оптимальный вариант маршрута движения с учетом рельефа местности, погодных условий, времени года и суток.
Осуществление возможности реализации сервисных задач по топогеодезическому обеспечению позволяет:
- производить автоматическое выполнение математических расчетов для решения прикладных топогеодезических задач;
- расширить функциональные возможности системы навигации и топопривязки.
Выдача выходных параметров навигации и корректирующей информации от навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных позволяет:
- обеспечить информационный обмен скорректированной навигационной информацией между системой навигации и топопривязки подвижного объекта и сопрягаемыми объектами;
- обеспечить совместимость с техническими средствами взаимодействующих объектов;
- обеспечить автоматизированное плановое распределение навигационной информации по всем абонентам;
- расширить зону обслуживания и сократить количество средств навигации и топогеодезического обеспечения, работающих в одно районе.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
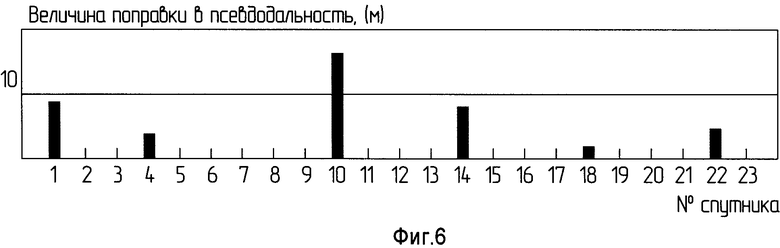
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема алгоритма реализации данного способа; на фиг.2 - примерный график распределения ожидаемого количества видимых на небосклоне спутников при использовании двух космических навигационных систем; на фиг.3 - схема комплексирования навигационной информации; на фиг.4 - пример, график результатов расчета временных зон видимости навигационных космических аппаратов; на фиг.5 - пример, график расчета геометрического фактора; на фиг.6 - пример, график оценки распределения величин поправок в псевдодальность.
Алгоритм реализации способа автоматизированного определения навигационно-топогеодезических параметров реализуется следующим образом.
1. На первоначальном этапе для повышения точности и надежности (доступности, непрерывности обслуживания и целостности) навигационных определений спутниковых навигационных систем (СНС) выбирается режим взаимодействия системы навигации с навигацинными полями ГЛОНАСС и GPS. Сигналы ГЛОНАСС и GPS используются совместно (по умолчанию), а введение селективного доступа по системе GPS отслеживается программным детектором таксонометрическим методом с учетом весовых коэффициентов, и в зависимости от характера погрешности для группировки GPS и качества данных по ГЛОНАСС СНС автоматически либо переключается в режим работы только по группировке ГЛОНАСС либо рассчитывает эти ошибки для навигационных космических аппаратов системы GPS и компенсирует их при дальнейшей работе по совместной группировке.
СНС имеют высокий уровень технических характеристик, которые обеспечивают наибольшую точность временной и координатной привязки потребителей. Однако надежность и достоверность определения местоположения с помощью этих спутников зависит от степени их работоспособности в сложных условиях космического пространства на высотах над Землей до 20000 км.
Уравнение для определения погрешности дальномерных измерений до навигационного спутника выглядит следующим образом:

где δНС - погрешность формирования бортовой шкалы времени, вносимая на навигационном спутнике;
δТР - погрешность при прохождении сигнала на трассе распространения сигнала от спутника до антенны приемной аппаратуры потребителя;
δАП - погрешность, вносимая приемной аппаратурой потребителя;
δПР - прочие погрешности дальномерных измерений, имеющие в основном случайный характер.
Погрешность δНС обусловлена несовершенством частотно-временного и эфемеридного обеспечения навигационных спутников. Погрешности частотно-временного обеспечения возникают вследствие несовершенства процедур сверки и хранения бортовой шкалы времени. Эфемеридные погрешности навигационно-временных определений вызваны неточностью определения параметров орбиты и непрогнозируемыми смещениями спутника относительно экстраполированной орбиты.
Погрешность δТР вызвана неточным знанием условий распространения радиоволн в атмосфере Земли. В атмосфере выделяют несколько слоев, отличающихся своими свойствами. Эти слои оказывают заметное влияние на качество навигационных измерений, которое проявляется в дополнительных задержках сигнала, возникающих из-за рефракции сигналов спутника (искривления трассы распространения радиоволн) при прохождении атмосферы Земли.
К погрешности δАП, обусловленной аппаратурой потребителя, относится погрешность слежения за моментом прихода (временного положения) сигнала спутника.
В этом случае на первый план выступают энергетические характеристики СНС. Ослабление электромагнитных волн рассчитывается по известной формуле [Вестник Днепропетровского университета, серия «Физика. Радиотехника». 2007, вып.14, №12/1; Липкин И.А. Спутниковые навигационные системы. - М., - 2001, 336 с.:

где R - расстояние между спутником и потребителем навигационной информации;
λ - длина волны, соответствующая рабочей частоте.
Совместное использование ГЛОНАСС и GPS позволяет снизить влияние ослабления электромагнитных волн и обеспечивает повышение производительности работ. При совместной работе ГЛОНАСС и GPS минимальное количество видимых спутников возрастает, исчезают срывы инициализации, т.к. нет потери времени на ее возобновление, появляется возможность работать в ранее недоступных местах и в неблагоприятные временные периоды, при потере инициализации совместная система GPS+GLONASS повторно инициализируется быстрее, чем просто GPS или ГЛОНАСС. Примерный график распределения ожидаемого количества видимых на небосклоне спутников при использовании двух космических навигационных систем приведен на фиг.2.
2. На следующем этапе (в реальном режиме времени) осуществляется формирование и выдача автономной инерциальной навигационной информации (ИНИ). В основе автономного канала навигации лежит метод счисления пути (измерении пройденного расстояния) при известном (по компасу с хранителем) направлении, позволяющий получать непрерывную информацию о местоположении движущегося подвижного объекта.
Ошибка определения координат объекта при помощи инерциальных навигационных систем складывается из методических и инструментальных погрешностей. Первые обусловлены неточным математическим описанием формы Земли, ее гравитационного поля, упрощением математического обеспечения, реализуемого в системе. Инструментальные ошибки вызваны погрешностями работы отдельных элементов системы (акселерометров, гироскопов). Общая погрешность системы рассматривается как сумма всех ее составляющих, если предположить, что они являются постоянными величинами, или как суммарная среднеквадратическая, если предположить, что они - случайные величины, где σxi(t) и σyj(t) - дисперсия отдельных составляющих погрешности, вызванные i-м и j-м источниками погрешностей, соответствующие моменту времени t:
Результаты оценки погрешности системы показывают [Вестник Днепропетровского университета, серия «Физика. Радиотехника». 2007, вып.14, №12/1; Гироскопические системы. Проектирование гироскопических систем (в 2 ч.) / Под ред. Д.С.Пельпора. Учебное пособие для ВУ3ов. - М., 1977. - 216 с.], что ошибка возрастает пропорционально времени работы инерциальной навигационной системы (для движущегося объекта - пропорционально пройденному пути). Ошибка определения координат при движении подвижного объекта в течение длительного времени достигает значительной величины без корректировок при помощи специальных средств. Поэтому инерциальные навигационные системы нуждаются в корректировке показаний в процессе движения за счет привлечения информации от других источников (например, системы спутниковой навигации, системы определения параметров высоты, устройств, выдающих корректирующую информацию по самим космическим навигационным полям), обеспечив при этом непрерывность определения местоположения объекта.
3. На следующем этапе (в реальном режиме времени) для повышения точности навигационной информации определяется информация о параметрах высоты (ИПВ) точек местности на маршруте подвижного объекта и в том числе об атмосферном давлении и температуре за бортом подвижного объекта.
Работа системы определения высоты основана на относительном методе измерения высоты точек местности, заключающемся в измерении атмосферного давления и температуры воздуха в измеряемой точке и в исходной (начальной) точке и вычислении по результатам измерений разности высот.
4. Далее для обеспечения требуемой точности определения навигационной информации проводится комплексирование инерциальной навигационной информации (ИНИ), информации о параметрах высоты (ПВ) подвижного объекта со спутниковой навигационной информацией (СНИ) посредством фильтра Калмана в автономном режиме навигации, что позволяет производить обработку информации, полученной от источников, работа которых построена на различных физических принципах.
Простота реализации способствовала широкому применению алгоритма фильтра Калмана в навигационных системах гибридной природы [Применение фильтра Калмана в навигационной аппаратуре. Статья подготовлена по материалам, опубликованным в журнале GPS World. Сентябрь, 1997 Advanstar Communications, 859 Willamette Street, Eugene, OR 97401, USAPhone+(541) 343-1200, Fax+(541) 984-5333, E-mail: editorial-gps@gpsworld.com. Перевод выполнен "Навгеоком" © 2000 Ларри Леви (Larry J. Levy, The Johns Hopkins University, Applied Physics Laboratory)].
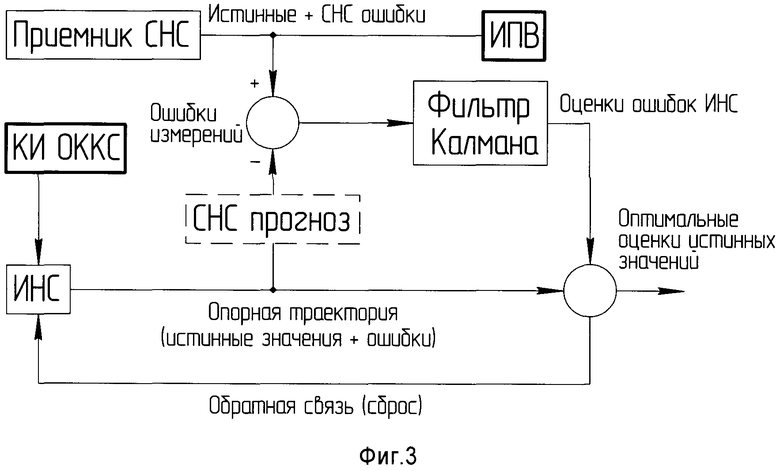
Сочетание спутниковой и инерциальной навигационных систем совместно с фильтром Калмана позволяет повысить точность навигационных определений. Измерения, полученные инерциальной системой, с одной стороны, характеризуются низким уровнем случайных ошибок, с другой стороны, результаты спутниковых определений не подвержены подобным сдвигам системы координат, однако в большей степени отягощены случайными погрешностями. Располагая характеристиками инструментальных ошибок обеих систем, фильтр Калмана сводит к минимуму их влияние на выходные навигационные данные. Поскольку большинство реальных инерциальных и спутниковых навигационных систем нелинейны, возникает задача линеаризации их моделей. Такой подход к совместному использованию обеих навигационных систем иллюстрирует фиг.3 (изображение в тонких линиях).
Истинные значения навигационных данных, вырабатываемые каждой из систем, поступают на вход фильтра Калмана с обратными знаками, компенсируя друг друга. В данном случае моделированию подлежат только инструментальные погрешности. В большинстве случаев можно считать, что траектория, выдаваемая инерциальной системой, принимаемая в качестве опорной, достаточно близка к истинной, и несмотря на то, что система в целом нелинейна, фильтр Калмана работает в линейной области совместных погрешностей обоих навигационных методов. К ошибкам спутниковой аппаратуры относятся: нестабильность частоты генератора приемника и спутникового стандарта частоты, задержки сигнала, вызванные влиянием тропо- и ионосферы, эффект многолучевости и неточности в эфемеридном обеспечении. Погрешности инерциальной системы включают ошибки начальных условий, уход гироскопов, а также ошибки, вносимые акселерометрами. Если при совместном применении инерциальной и спутниковой навигационных систем последняя предоставляет положение объекта, то считается, что такая гибридная система построена по схеме со слабой связью составляющих ее частей. Примером тесной связи может служить задействование в гибридной системе величин, непосредственно измеряемых при спутниковых определениях, в этом случае опорная траектория, получаемая инерциальным методом, вместе с эфемеридной информацией используются для прогноза спутниковых измерений, таким образом, место локализации моделируемых погрешностей переместится из области вычисляемых координат в область измеряемых псевдодальностей и фаз несущей. Схема тесной связи предпочтительнее, поскольку результирующая система менее чувствительна к срывам приема спутникового сигнала. Приведение в действие контура обратной связи может рассматриваться как расширение фильтрации по Калману (см. фиг.3, изображение тонкими линиями).
Исходя из вышеизложенного, для повышения точности выходной навигационной информации проводится коррекция навигационной информации, поступающей от навигационных космических аппаратов, выполняемая в режиме опорной контрольно-корректирующей станции (ОККС), имеющей собственное программно-математическое обеспечение.
Контрольно-корректирующая станция является функциональным дополнением к космическим навигационным системам ГЛОНАСС и GPS и представляет из себя комплекс радиотехнических и программно-вычислительных средств, осуществляющий формирование корректирующей информации (КИ) по системам ГЛОНАСС/GPS и контролирующий качество их функционирования в объявленной рабочей зоне.
Основной задачей станции является формирование корректирующей информации, включающей дифференциальные поправки, и контроль качества сформированных дифференциальных поправок.
Программно-математическое обеспечение служит целям управления функционирования аппаратуры, выполнения задач индикации и обеспечения информационного обмена между составными частями опорной станции. Программно-математическое обеспечение состоит из следующих основных элементов: программы управления составными частями, программы расчета видимости, программы для вычисления оценки местоположения опорной станции и ряда обслуживающих программ.
Ввиду того, что система навигации работает с различными СНС, опорная станция выполняет преобразование координат из одной координатной системы в другую.
Преобразования пространственных прямоугольных координат выполняют по формуле:

где А и В - системы координат;
dX, dY, dZ - линейные элементы трансформирования, [м];
Wx, Wy, Wz - угловые элементы трансформирования, [угловые секунды];
m - дифференциальное различие масштабов систем координат, выраженное в единицах 6-го знака.
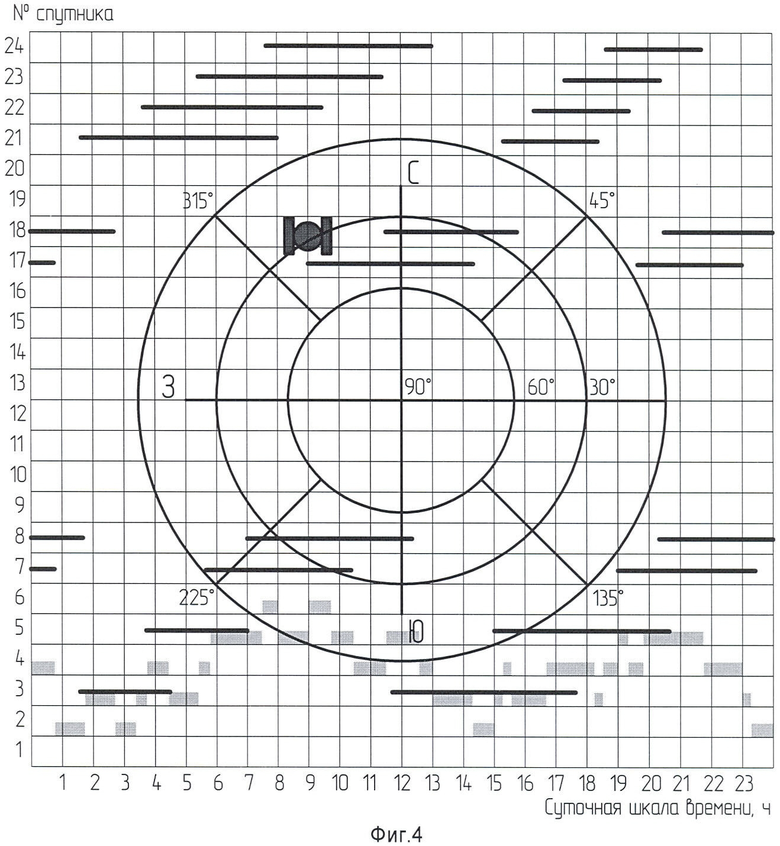
Пример результатов расчета временных зон видимости представлен на графике (см. фиг.4). Горизонтальные линии, расположенные напротив номера спутника, определяют временную зону видимости данного спутника для пункта с установленными координатами. Широкой чертой отмечено изменение количественного состава спутников визируемых созвездий на суточном интервале времени. В центре окна на мишени, имитирующей небесную сферу над пунктом с установленными координатами, отображено пространственное расположение выбранного навигационного космического аппарата.
Пример результатов оценки изменения полного геометрического фактора визируемых созвездий навигационных космических аппаратов на суточном интервале времени, позволяющих оценить возможность проведения и точностные характеристики навигационных сеансов, представлен на графике (см. фиг.5). Составляющие полного геометрического фактора: координатная составляющая, плановая (горизонтальная) составляющая, высотная составляющая.
На графике (см. фиг.6) приведен пример представления характеристики качества выработанных на опорной станции дифференциальных поправок по системе ГЛОНАСС. Кроме графических данных по дифференциальным поправкам предоставляются данные в цифровом виде.
5. В реальном формате времени в автоматизированном режиме происходит окончательная обработка и распределение навигационной информации, что позволяет осуществить автоматическую прокладку маршрута по заданным точкам с отображением маршрута движения на цифровой карте местности, выполнять сервисные задачи по топогеодезическому обеспечению и выдачу выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных (АКПД).
Реализация способа осуществляется в автоматизированном режиме и обеспечивается бортовым вычислительным комплексом подвижного объекта в соответствии с алгоритмом функционирования (специальным программным обеспечением), охватывающим все элементы системы в целом.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа автоматизированного определения навигационно-топогеодезических параметров, обеспечивающего автоматизированный режим определения и регистрации выходных навигационных данных в соответствии с алгоритмом функционирования системы в целом, возможность совместного и селективного режимов работы в полях различных космических навигационных систем, достижение высокой точности и надежности с учетом информации по определению высоты точек местности на маршруте за счет доступности, непрерывности обслуживания и целостности навигационных определений по сигналам навигационных космических аппаратов, коррекцию навигационной информации, поступающей от навигационных космических аппаратов, в режиме опорной контрольно-корректирующей станции, реализацию сервисных задач по топогеодезическому обеспечению и выдачу выходных параметров навигации и корректирующей информации от навигационных космических аппаратов внешним потребителям.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКИЙ КОМПЛЕКС НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2010 |
|
RU2428660C1 |
| Способ приема и передачи топопривязчиком дифференциальных поправок | 2017 |
|
RU2657337C1 |
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |


Изобретение относится к области приборостроения и может быть использовано в спутниковых навигационных системах. Технический результат - повышение точности и эффективности систем навигации. Для достижения данного результата способ включает получение информации о параметрах навигации от инерциальной и спутниковой навигационных систем путем совместного или селективного режимов работы в полях различных космических навигационных систем, комплексирование сигналов спутниковой и инерциальной навигационных систем, в результате которого находят скорректированные параметры навигации и величины ошибок значений, вырабатываемых инерциальной навигационной системой. Комплексирование проводится с учетом информации о параметрах высоты точек местности на маршруте подвижного объекта. Затем осуществляют передачу величин ошибок в инерциальную навигационную систему для коррекции вырабатываемых ей в последующие моменты времени параметров навигации. Коррекция выполняется в режиме опорной контрольно-корректирующей станции, имеющей собственное программно-математическое обеспечение. 6 ил.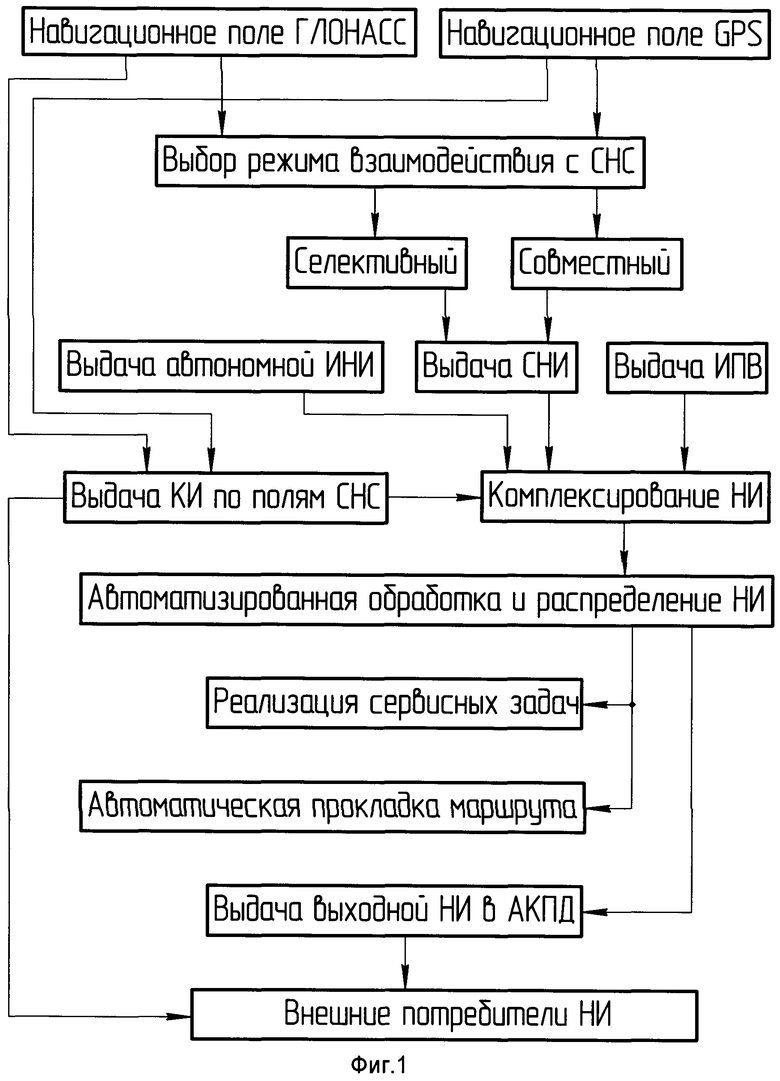
Способ автоматизированного определения навигационно-топогеодезических параметров, включающий получение информации о параметрах навигации от инерциальной и спутниковой навигационных систем, комплексирование сигналов спутниковой и инерциальной навигационных систем, в результате которого находят скорректированные параметры навигации и величины ошибок значений, вырабатываемых инерциальной навигационной системой, передачу величин этих ошибок в инерциальную навигационную систему для коррекции вырабатываемых ей в последующие моменты времени параметров навигации, отличающийся тем, что прием спутниковой навигационной информации осуществляется путем совместного или селективного режимов работы в полях различных космических навигационных систем, комплексирование проводится с учетом информации о параметрах высоты точек местности на маршруте подвижного объекта, одновременно в инерциальной навигационной системе проводится коррекция навигационной информации, поступающей от навигационных космических аппаратов, выполняемая в режиме опорной контрольно-корректирующей станции, имеющей собственное программно-математическое обеспечение, реализация способа осуществляется в автоматизированном режиме в соответствии с алгоритмом функционирования (специальным программным обеспечением), охватывающим все элементы системы в целом, выполненным с возможностью осуществления автоматической прокладки маршрута по заданным точкам, реализации сервисных задач по топогеодезическому обеспечению и выдачи выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАВИГАЦИИ | 2007 |
|
RU2338160C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2000 |
|
RU2173835C1 |
| СОЛОВЬЕВ Ю.А | |||
| Системы спутниковой навигации | |||
| - М.: КТЦ-"Эко-Трендз", 2000, с.368 | |||
| Кинематика инерциальных систем навигации | |||
| ЗАХАРИН М.И., ЗАХАРИН Ф.Ш | |||
| - М.: Машиностроение, 1968, с.236 | |||
| БОТУЗ С.П | |||
| Обработка многомерной числовой информации при исследовании и разработке | |||

