Объектом изобретения является бортовая система содействия пилотированию летательного аппарата, известная под англо-саксонским сокращением GLS (GNSS Landing System). В частности, изобретение касается содействия пилотированию в фазе захода на посадку, то есть в фазе, предшествующей приземлению летательного аппарата.
Изобретение относится к области систем содействия пилотированию, основанных на применении систем GNSS.
Система содействия пилотированию типа GLS предоставляет отклонения углового и метрического наведения вдоль траектории захода на посадку летательного аппарата в направлении посадочной полосы аэропорта с точностью, достаточной для обеспечения приземления и автоматического руления самолета в условиях почти нулевой видимости.
Эти отклонения вырабатывают на основании трехмерного позиционирования летательного аппарата, получаемого при помощи системы GNSS (Global Navigation Satellite System) и связанной с ней системы типа GBAS (Ground Based Augmentation System). Позиционирование, обеспечиваемое системой GBAS, приводят к идеальной трехмерной траектории, которой должен следовать самолет, чтобы довести его до посадочной полосы.
В зависимости от уровня видимости при приземлении определяют несколько категорий захода на посадку. Так называемый заход категории I не позволяет следовать до самого приземления, а только приблизиться к зоне приземления до так называемой высоты принятия решения в 100 футов. Заход на посадку категории I должен удовлетворять требованиям безопасности, количественно определяемым в виде риска получения необнаруженных ошибочных выходных данных менее 10-7 в час.
При так называемом заходе на посадку категории III, происходящем вблизи земли и в условиях видимости, которые могут быть очень ограниченными, система GLS должна гарантировать уровень необнаруженных ошибочных выходных данных ниже 10-9 в час. Под выходными данными следует понимать все измерения отклонений наведения, предоставляемые системой GLS для содействия навигации в фазе захода на посадку.
Следовательно, существует потребность в разработке системы GLS с очень высоким гарантированным уровнем достоверности, совместимым с потребностями фазы захода на посадку категории III.
Известные технические решения для реализации систем GLS чаще всего совместимы только с процедурами захода на посадку категории I, то есть они не позволяют гарантировать достаточно низкий уровень необнаруженных ошибок на выходе.
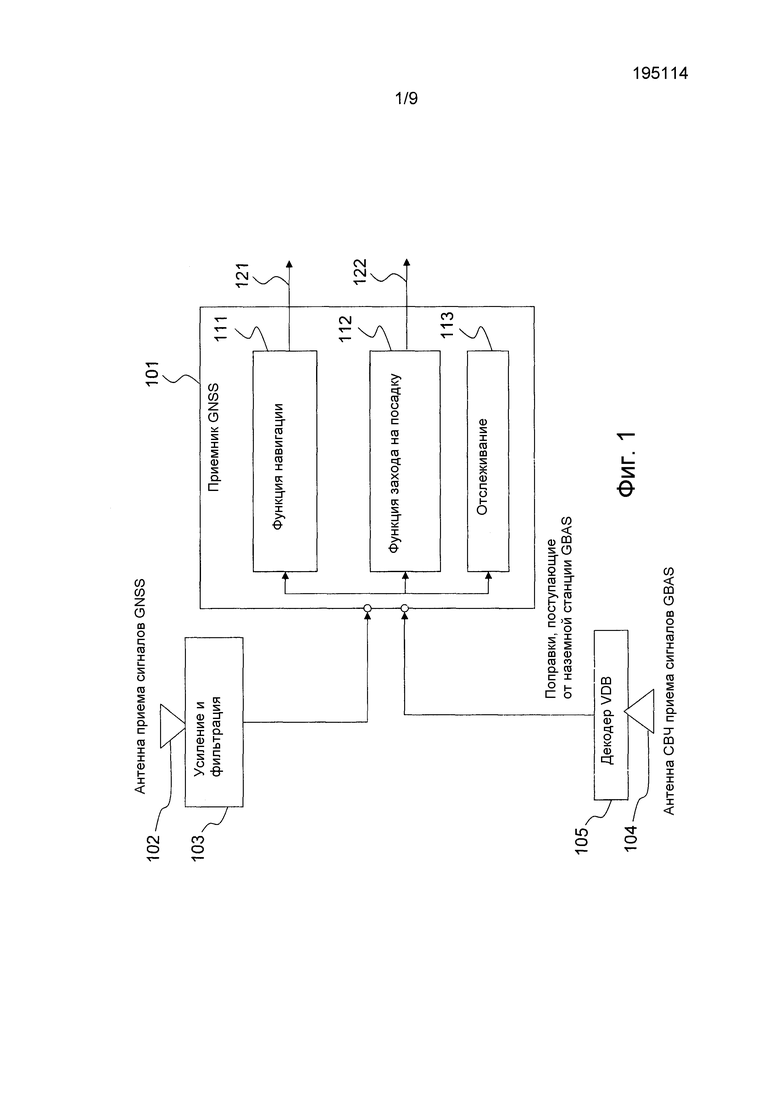
Различают два типа архитектуры известных систем GLS. Первый тип архитектуры на основе одноканального приемника GNSS показан на фиг. 1. Она в основном содержит приемник GNSS 101, например, типа GPS или GPS/SBAS (Satellite Based Augmentation System), соединенный, с одной стороны, через средства 103 усиления и фильтрации с антенной 102 приема спутниковых радионавигационных сигналов GPS или GPS/SBAS и, с другой стороны, с декодером 105 типа VDB (VHF Data Broadcast), который принимает через антенну СВЧ 101 сигналы типа GBAS (Ground Based Augmentation System), передаваемые наземной станцией. Декодер VDB 105 передает в приемник GNSS 101 набор поправок, называемых также данными дополнения, которые позволяют повысить надежность сигналов GNSS, принимаемых через антенну 102. На основании сигналов GNSS и поправок GBAS приемник GNSS 101 реализует, с одной стороны, функцию 111 навигации и, с другой стороны, функцию 112 захода на посадку, а также функцию 113 отслеживания. Функция 111 навигации выдает на выходе набор измерений положения, скорости и времени, обеспечивая содействие навигации.
Функция 112 захода на посадку выдает на выходе набор аналогичных измерений или отклонений, обеспечивая содействие при посадке в фазе захода на посадку.
Наконец, функцию 113 отслеживания применяют, чтобы гарантировать риск достоверности, соответствующий операциям ограниченной критичности, например, операциям типа “Major” для навигации или “Hazardous” для захода на посадку. Для операций этого типа риск достоверности, связанный с материальной неисправностью приемника, должен быть ограничен до 10-7/час, как было указано выше.
Решение одноканального типа, представленное на фиг. 1, не позволяет удовлетворять требованиям безопасности операций с более высоким уровнем риска достоверности, например, операций, относящихся к типу “catastrophic”, для которых риск достоверности должен быть ниже 10-9/час. Действительно, чтобы отвечать таким требованиям безопасности, необходимо, чтобы вероятность того, что простой отказ влечет ошибки достоверности, была ничтожной по отношению к риску достоверности 10-9/час. Если взять коэффициент 1000, то вероятность появления простой неисправности, влияющей на достоверность, должна быть ниже 10-12/час, что является недостижимым. Решения, основанные на применении одного канала, не защищены от простой неисправности, так как они не предполагают наличия внешнего средства мониторинга, позволяющего обнаружить эту неисправность. Заходы на посадку категории III относятся к типу “catastrophic” и, следовательно, не могут применяться при помощи этого типа одноканального решения.
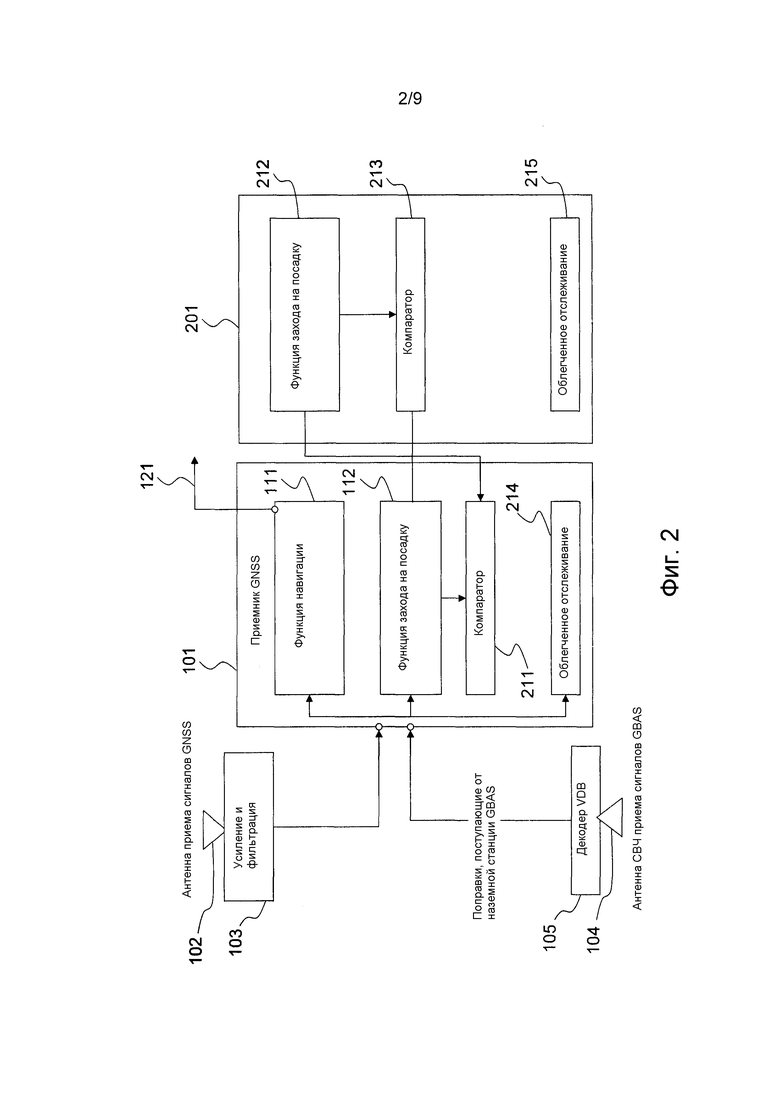
Второй тип архитектуры, основанный на двухканальном механизме модулей GNSS, представлен на фиг. 2. Идентичные элементы архитектуры на фиг. 1 и 2 обозначены одинаковыми позициями.
Второй модуль GNSS 201, называемый также вторым каналом, связан с первым приемником GNSS 101 для повышения уровня достоверности всей системы. Для этого при помощи двух компараторов 211, 213 осуществляют перекрестное сравнение выходных данных каждой функции захода на посадку 112, 212. Простой критерий позволяет исключить измерения отклонений наведения, которые слишком различаются между двумя модулями. В каждом модуле GNSS 101, 201 осуществляют облегченное отслеживание 214, 215, но оно позволяет гарантировать соответствующий риск достоверности только для операций категории I.
Второй канал 201 образует механизм внешнего контроля первого канала 101, однако это решение не обеспечивает независимости обоих каналов. Действительно, параллельное использование двух каналов без обеспечения их непохожести защищает только от ошибок достоверности, связанных с разнообразием компонентов по их изготовлению и степени надежности, но не гарантирует обнаружения ошибок достоверности, связанных с концептуальными погрешностями, проявляющимися при одном и том же внешним событии. В качестве примеров внешних событий, не обнаруживаемых при помощи решения, представленного на фиг. 2, можно указать:
- отказ электронных компонентов, связанный со специфической средой вибрации, ускорения или температуры: в приемниках GNSS чувствительными к этим явлениям являются фильтры, генераторы колебаний, усилители, которые могут привести к ошибкам достоверности,
- отказ функций питания, связанный с нарушениями в работе каскадов первичного питания двух приемников 101, 201,
- отказ функций GNSS, связанный со специфической конфигурацией, неожиданной для приемника системы GNSS, например, касающейся модуляции сигнала, доплеровского эффекта, ощущаемого приемником, специфической геометрии группировки спутников или конкретного момента приема сигналов,
- отказ функций GNSS, связанный со специфической конфигурацией, неожиданной для приемника самолета,
- отказ функций GNSS, связанный со специфической средой (динамика, положение в полете, расчетное место, текущее время…), неожиданной для приемника помех и/или множественных путей,
- отказ функций захода на посадку, связанный со специфической конфигурацией, неожиданной для приемника наземной станции и приемника передаваемых поправок (идентификация, аутентификация, сегмент захода на посадку (FAS), передаваемые поправки…).
Для всех представленных выше примеров единое событие может свидетельствовать об одинаковом конструктивном дефекте на двух каналах 101, 201, что не позволяет применить функции сравнения, так как оба канала могут выдавать очень похожую ошибку достоверности, которую поэтому не может обнаружить простой компаратор.
Этот недостаток недопустим при операциях захода на посадку категории III типа “Catastrophic” по двум причинам. Прежде всего простая неисправность может привести к ошибке, не обнаруженной на выходе двойного канала. С другой стороны, зависимость двух каналов от общих неисправностей значительно ограничивает выигрыш, достигаемый в отношении риска достоверности, и не позволяет добиться желаемого уровня 10-9/час не обнаруживаемых неисправностей.
Эту проблему можно проиллюстрировать при помощи следующего уравнения с использованием следующих переменных:
- HMI - обеспечиваемый риск достоверности,
- HMIC - риск достоверности, общий для обоих приемников и связанный с конструктивным дефектом,
- HMIRx1 - риск достоверности, характерный для первого приемника 101,
- HMIRx2 - риск достоверности, характерный для второго приемника 201,
- Р - вероятность необнаружения ошибки достоверности при сравнении результатов, выдаваемых двумя приемниками 101, 201.
Таким образом:
HMI=HMIC+P·(HMIRx1+HMIRx2+HMIRx1·HMIRx2)
Это уравнение отражает от факт, что принцип двойного канала позволяет снизить только риски достоверности HMIRx1, HMIRx2, независимые между двумя приемниками 101, 201, воздействуя на вероятность Р. С другой стороны, невозможно исключить общие риски достоверности HMIC.
Таким образом, существующие решения не позволяют ограничить риск достоверности до уровня безопасности, необходимого при операции захода на посадку категории III.
Задачей изобретения является разработка системы GLS, которая позволяет получать уровень достоверности, достаточный, чтобы гарантировать риск выдачи не обнаруживаемой ошибочной информации на уровне, необходимом для операций захода на посадку категории III.
Изобретение позволяет также избежать ситуации, когда простая неисправность влечет за собой не обнаруживаемую ошибочную информацию.
Таким образом, объектом изобретения является устройство приема радионавигационных сигналов для содействия пилотированию летательного аппарата, отличающееся тем, что содержит несхожие первый ведущий модуль GNSS и второй ведомый модуль GNSS, при этом первый ведущий модуль GNSS содержит первое средство обработки сигналов и первое средство вычисления данных наведения на основании измерений, поступающих от упомянутого первого средства обработки сигналов, при этом второй ведомый модуль GNSS содержит второе средство обработки радионавигационных сигналов и второе средство вычисления данных наведения на основании измерений, поступающих от упомянутого второго средства обработки сигналов, при этом каждый модуль GNSS дополнительно содержит средство сравнения между выходами Xg1, Xg2 упомянутых первого и второго средств вычисления данных наведения, выполненное с возможностью исполнения следующего теста достоверности:

и вывода об ошибке достоверности, если упомянутый тест подтверждается, при этом Kg является порогом обнаружения, заранее установленным таким образом, чтобы получить заданную вероятность Pnd обнаружения погрешности, влияющую на одно или другое или одновременно на оба измерения Xg1, Xg2, и заданную вероятность Pfa ложной тревоги.
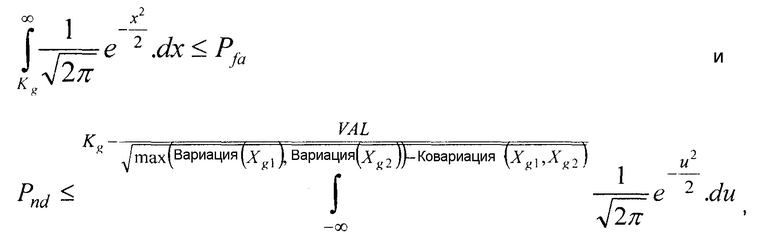
Согласно отличительному признаку изобретения, порог обнаружения Kg определяют при помощи следующих двух неравенств:
где VAL является допустимым предельным значением погрешности по двум измерениям Xg1, Xg2, ниже которого гарантирована достоверность упомянутых измерений.
Согласно другому отличительному признаку изобретения, общие источники погрешности между первым ведущим модулем GNSS и вторым ведомым модулем GNSS исключены из вычисления вариации разности между выходами Xg1, Xg2 упомянутых первого и второго средств вычисления данных наведения.
В частном варианте выполнения изобретения данные наведения, по меньшей мере, равны одной из следующих данных: горизонтальное положение, боковое отклонение, боковое прямолинейное отклонение, вертикальное отклонение, вертикальное прямолинейное отклонение или расстояние до порога полосы.
В версии выполнения изобретения средство сравнения предварительно осуществляет этап компенсации асинхронности между первым ведущим модулем GNSS и вторым ведомым модулем GNSS по данным наведения горизонтального положения.
Асинхронность компенсируют, например, вычисляя разность ΔPOS горизонтальных положений Pa, Pb, выдаваемых первым и вторым средствами вычисления данных наведения, следующим образом:
ΔPOS=Pb-Pa-Va⋅(Tb-Ta),
где Va является измерением скорости, выдаваемым первым средством вычисления данных наведения, Ta является измерением времени, выдаваемым первым средством вычисления данных наведения, и Tb является измерением времени, выдаваемым вторым средством вычисления данных наведения.
Асинхронность можно также компенсировать, синхронизируя вычисленные данные наведения по характеристической составляющей принятого радионавигационного сигнала.
Согласно другому отличительному признаку изобретения, первый и второй модули GNSS имеют материальную и/или программную несхожесть.
Согласно еще одному отличительному признаку изобретения, первый и второй модули GNSS сходны материально, но используют следующие несхожие виды цифровой обработки: разную цифровую фильтрацию, разные корреляторы, назначение разных частотных планов.
В версии выполнения устройство в соответствии с изобретением содержит отдельные антенну и предварительный усилитель для питания каждого модуля GNSS таким образом, чтобы ограничить общие источники ошибки достоверности.
В другой версии выполнения изобретения тест достоверности изменяют следующим образом:

где b является систематической погрешностью измерения, вычисляемой на основании априорного знания расстояния между двумя антеннами.
В другой версии выполнения устройство в соответствии с изобретением содержит антенну, средство деления мощности сигнала, принимаемого антенной, и два отдельных предварительных усилителя для питания каждого модуля GNSS таким образом, чтобы ограничить общие источники ошибки достоверности.
Объектом изобретения является также многорежимный приемник для содействия навигации летательного аппарата, содержащий систему посадки по приборам ILS и заявленное устройство приема радионавигационных сигналов для применения функции содействия посадке GLS в фазе захода на посадку.
Объектом изобретения является также гибридная система содействия навигации, содержащая многорежимный приемник, содержащий систему посадки по приборам ILS и гибридизационную инерциальную систему GNSS-IRS, включающую в себя инерциальную систему IRS, выдающую инерциальные данные, и средство гибридизации навигационных данных GNSS при помощи упомянутых инерциальных данных, отличающаяся тем, что дополнительно содержит заявленное устройство приема радионавигационных сигналов, первый ведущий модуль GNSS которого встроен в упомянутую инерциальную систему для выдачи упомянутых навигационных данных GNSS, а второй ведомый модуль GNSS встроен в упомянутый многорежимный приемник.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - архитектура известной одноканальной системы GLS.
Фиг. 2 - архитектура известной двухканальной системы GLS для операций захода на посадку категории I.
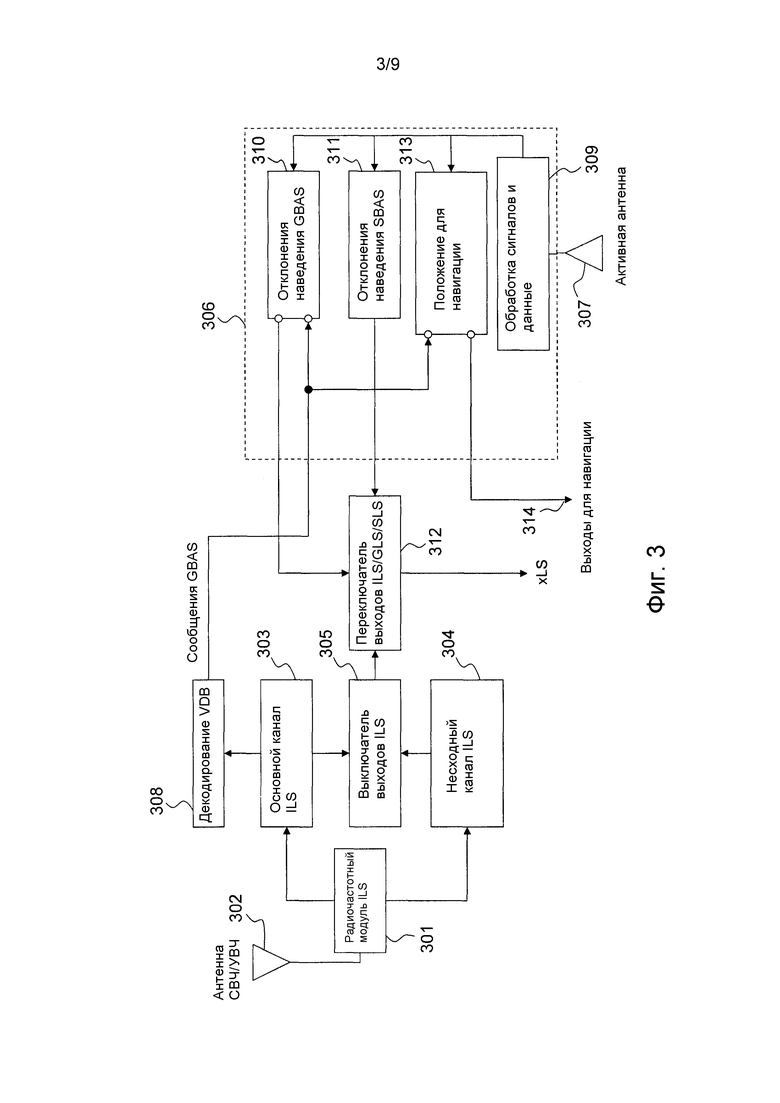
Фиг. 3 - архитектура известного оборудования MMR.
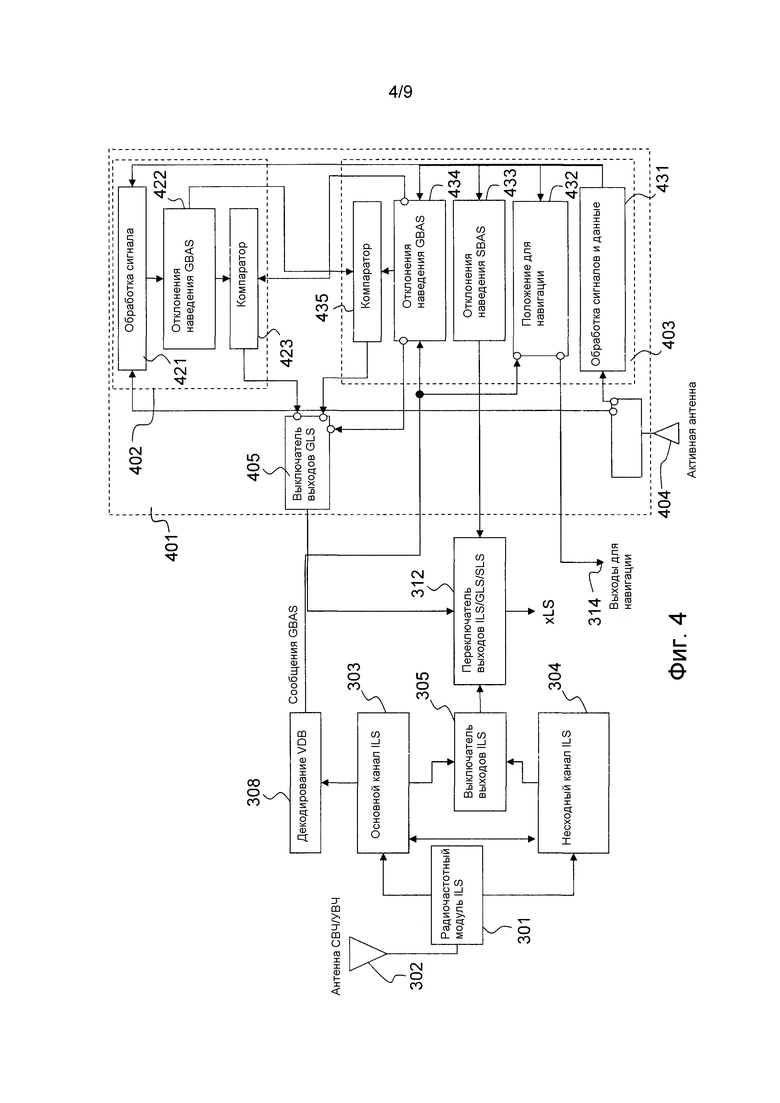
Фиг. 4 - архитектура заявленной системы GLS в первом варианте выполнения, касающемся ее применения в оборудовании MMR.
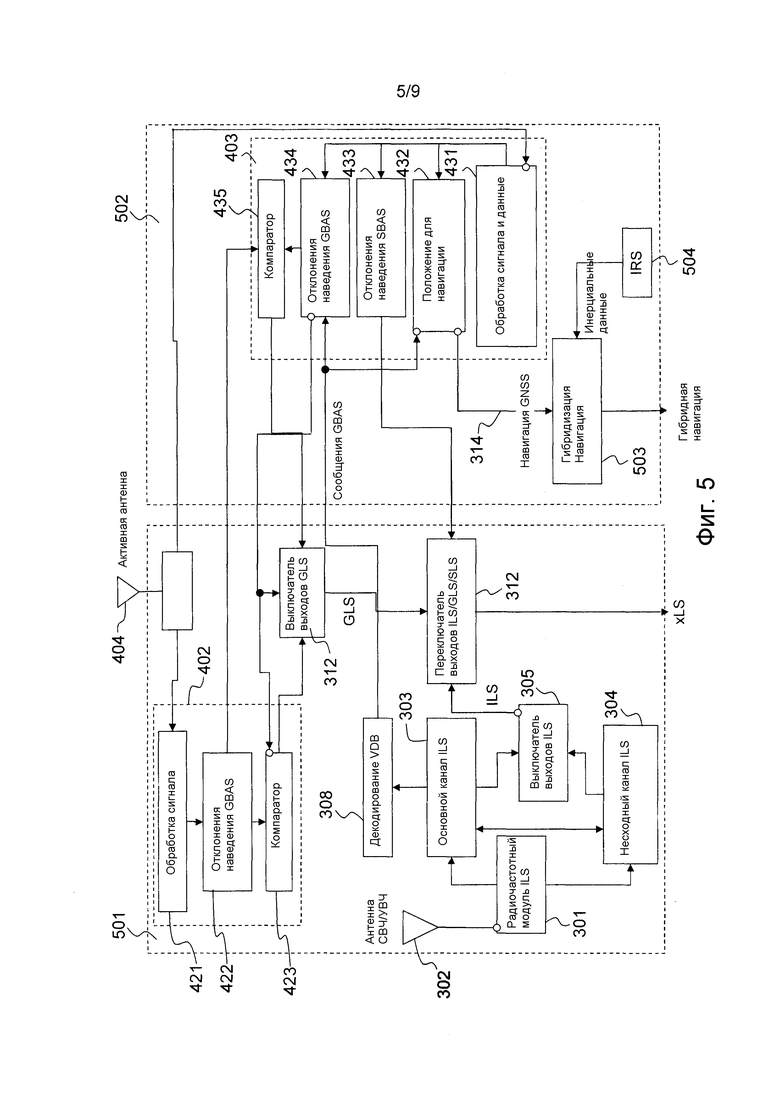
Фиг. 5 - архитектура заявленной системы GLS во втором варианте выполнения, касающемся ее применения в оборудовании GIRS.
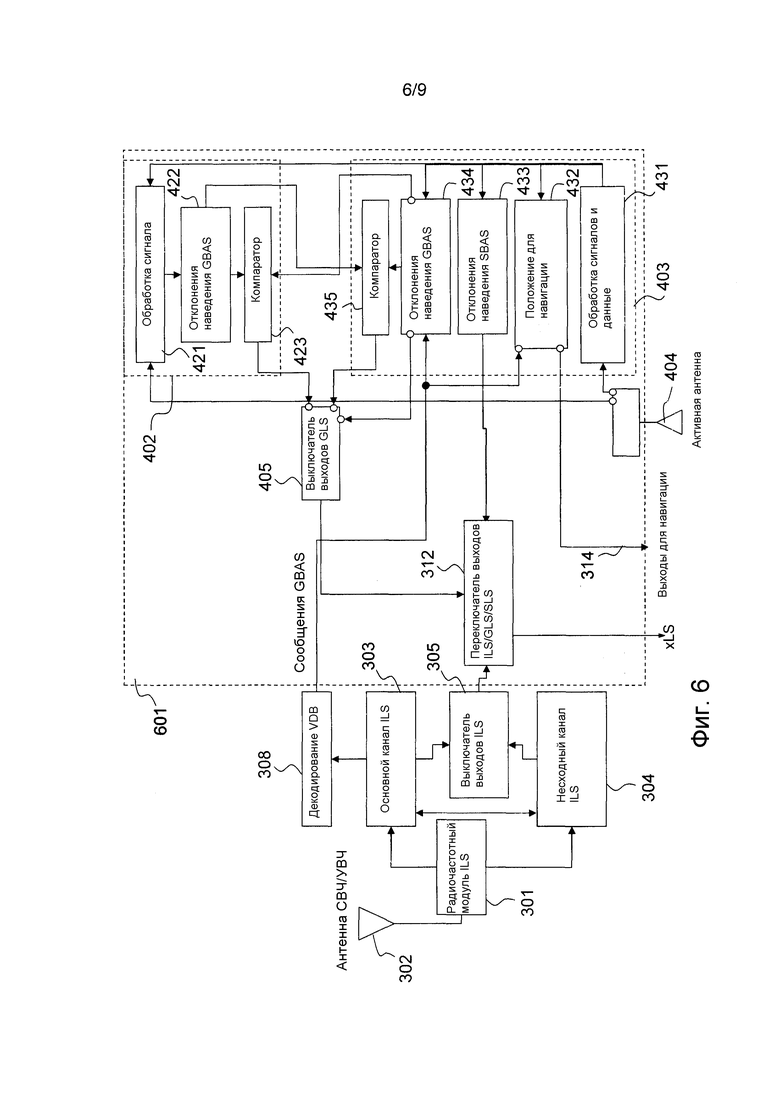
Фиг. 6 - архитектура заявленной системы GLS в третьем варианте выполнения, касающемся ее применения в автономном приемнике GNSS.
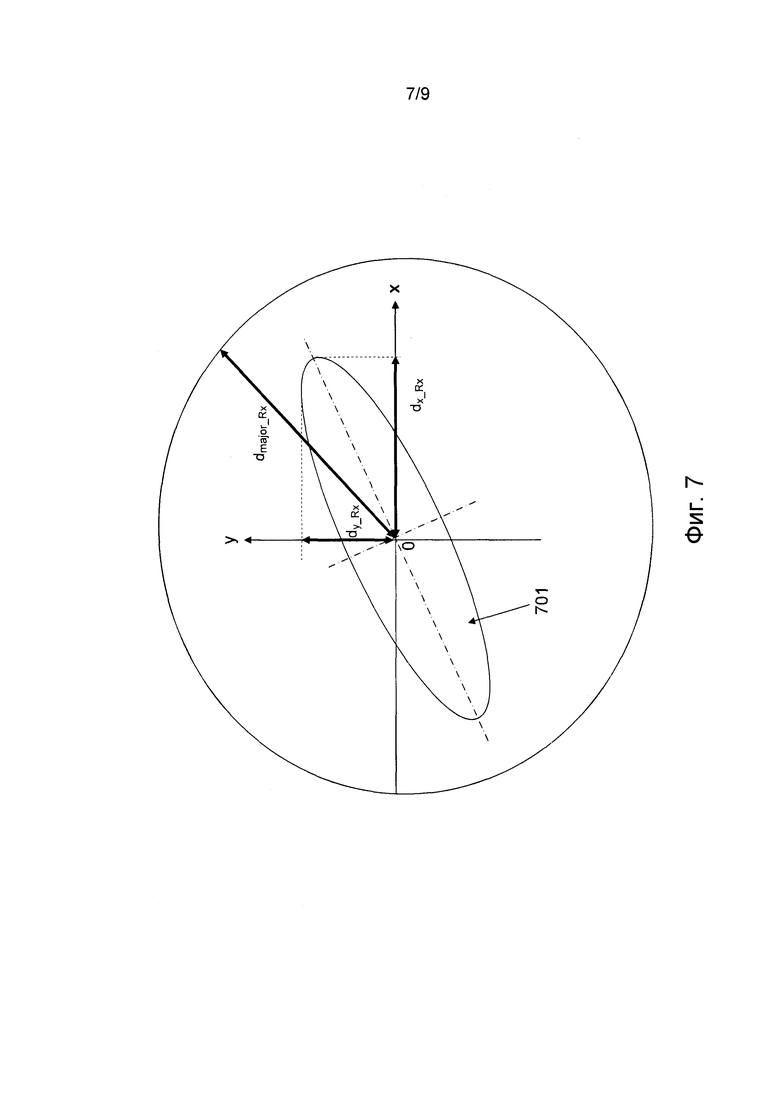
Фиг. 7 - схема вычисления вариации погрешности на горизонтальном положении для применения функции сравнения данных наведения, выдаваемых каждым каналом GNSS заявленной системы.
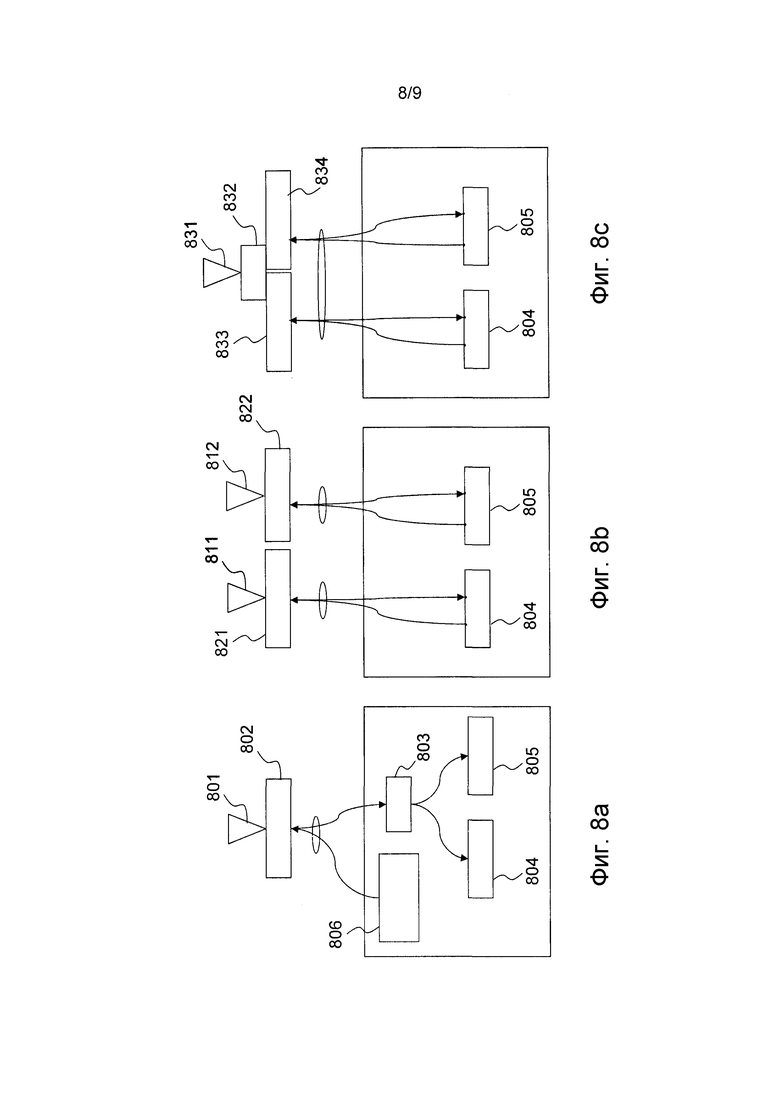
Фиг. 8а, 8b, 8с - три примера архитектур с одной и с двумя антеннами для одноканальной или двухканальной системы GLS.
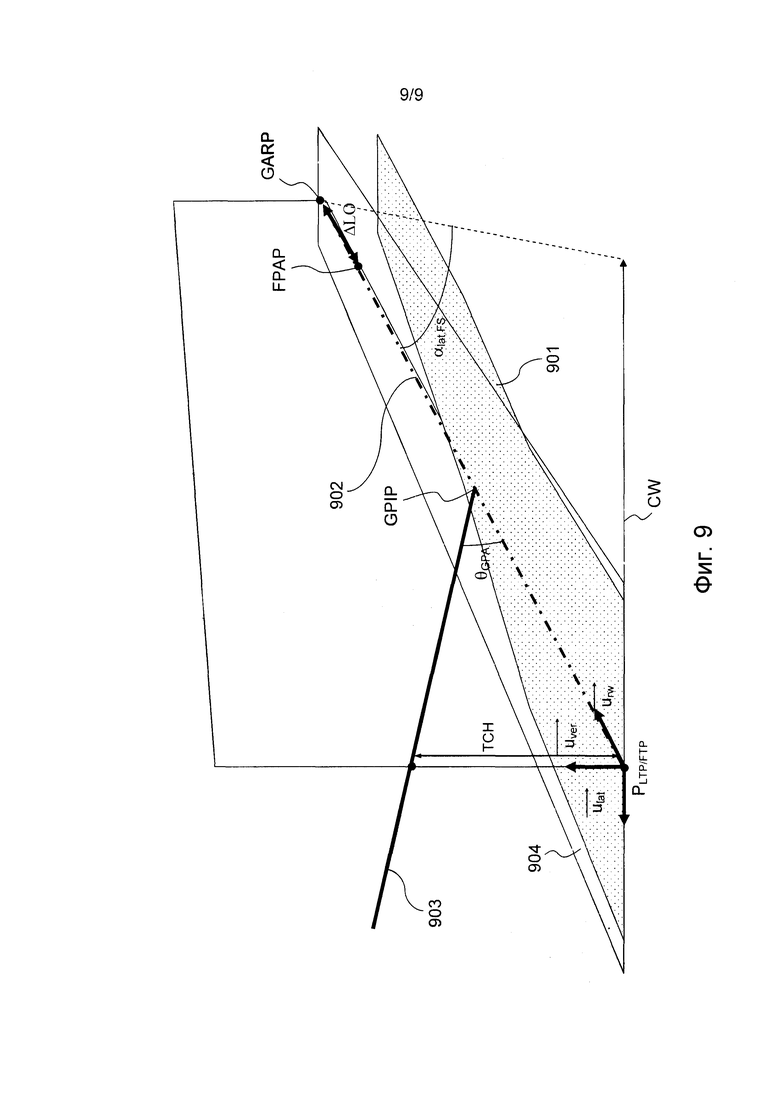
Фиг. 9 иллюстрирует параметры, необходимые для подготовки фазы захода на посадку.
Известная архитектура многорежимного приемника MMR, применяющего функцию содействия заходу на посадку GLS
На фиг. 3 схематично представлена известная архитектура многорежимного приемника MMR для осуществления функций содействия навигации и посадки, в частности, в фазе захода на посадку.
Получение отклонения наведения, позволяющее осуществлять автоматическое управление самолетом для фаз захода на посадку и приземления категории III, в настоящее время возможно только путем обработки на борту самолета радиоэлектрических сигналов, передаваемых наземными маяками в рамках механизмов посадки типа ILS (Instrument Landing System) или MLS (Microwave Landing System). Эти сигналы проходят обработку в приемниках сигналов СВЧ (сверхвысокой частоты) и УВЧ (ультравысокой частоты), состоящих из аналогового приемного модуля 301, который позволяет преобразовывать и оцифровывать радиоэлектрические сигналы, принимаемые антенной СВЧ или УВЧ 302, и из вычислительного модуля 303, 304, который позволяет трансформировать оцифрованные сигналы в измерения отклонения наведения, передаваемые на системы-пользователи через цифровую шину связи. Эти модули обработки встроены в устройство, называемое MMR (Multi Mode Receiver - многорежимный приемник).
Чтобы гарантировать достоверность выходного сигнала с учетом ограниченной надежности цифровых вычислительных элементов, как правило, модуль вычисления отклонений наведения состоит из двух разных вычислительных устройств 303, 304, элементы которого непрерывно сравниваются компаратором 305 для обнаружения аномалий работы. Чтобы избежать риска режима, общего для двух вычислительных устройств 303, 304, в конструкцию этих двух устройств вносят материальную и программную несхожесть.
Кроме того, устройство MMR предназначено также для осуществления функции содействия посадке GLS. Для этого оно дополнительно содержит модули, необходимые для предоставления данных наведения в режиме ILS или MLS, модуль GNSS 306, который принимает сигналы, передаваемые радионавигационными спутниками, через спутниковую антенну 307, а также модуль VDB 308, который позволяет принимать сообщения от наземной станции GBAS.
Автономная локализация, осуществляемая при приеме спутниковых сигналов, не имеет достаточных характеристик, чтобы наводить самолет во время фазы захода на посадку и приземления. Роль наземной станции GBAS в основном сводится к передаче сообщений коррекции, необходимых для функционального дополнения автономного приемника GNSS, а также для передачи траекторий захода на посадку, используемых в аэропорту в данный момент.
Функцию GLS применяют в современных системах только для поддержки операций захода на посадку категории I, которые характеризуются меньшей критичностью, чем операции категории III, и для которых требования безопасности является менее строгими. Поэтому функцию GLS поддерживает одноканальное вычислительное устройство GNSS, содержащее аналоговый радиочастотный модуль (не показан), позволяющий усиливать и оцифровывать радиоэлектрические сигналы, передаваемые спутниками, и вычислительный модуль 309, позволяющий выделять из оцифрованных сигналов данные, передаваемые спутниками, и измерения расстояния до этих спутников, чтобы получить измерения отклонения наведения 310. В альтернативном варианте можно также применять спутниковую систему функционального дополнения SBAS для получения альтернативных измерений отклонений наведения 311. Выбор осуществляет пользователь при помощи переключателя выходов 312, которые позволяет переключаться на измерения отклонений наведения, соответственно выдаваемые системой ILS, системой GLS, дополняемой через систему GBAS, или системой GLS, дополняемой через систему SBAS. Наконец, приемник GNSS 313 содержит также модуль 313 вычисления положения для навигации, который использует также поправки, предоставляемые системами GBAS или SBAS. Однако предоставляемые навигационные измерения не касаются фазы захода на посадку и вводятся лишь в качестве информационного сопровождения.
Сообщения от системы функционального дополнения GBAS, передаваемые через наземную станцию, содержат, в частности, следующие данные в специфическом случае радионавигационной системы GPS:
- поправки, передаваемые одночастотной L1 наземной станцией GPS, которые при их применении к сигналам GPS с частотой L1, принимаемым на борту самолета, позволяют гарантировать точность и требуемую достоверность для заходов на посадку категории I-III,
- данные, определяющие путь, которому должен следовать самолет в фазе захода на посадку и приземления. Этот путь использует приемник GPS для определения бокового и вертикального отклонения между вычисленным положением самолета и предназначенным для следования путем.
Эти сообщения GBAS передаются на частоте СВЧ, их принимает антенна СВЧ 302 системы MMR, демодулирует аналоговый модуль 301 и декодирует декодер VDB 308.
Приемник выдает боковое и вертикальное отклонения наведения “GLS GAST-C” (для заходов на посадку категории I) или “GLA GAST-D” (для заходов на посадку категории I-III).
При помощи переключателя 312 приемник MMR делает выбор между различными источниками отклонения наведения по команде пилота самолета между отклонениями, вычисленными на основании системы ILS (или MLS), отклонений, вычисленных на основании спутниковых данных GPS, скорректированных спутниковыми данными SBAS (SLS), и отклонениями, вычисленными на основании спутниковых данных GPS, скорректированных данными наземной станции аэропорта GBAS (GLS).
Приемник GNSS 306 выдает выходные данные для навигации 314, включающие в себя горизонтальное положение для локализации самолета и скорость, используемую функциями ADS-B (“Automatic Dependent Surveillance Broadcast) самолета. В настоящее время эти выходные навигационные данные 314 вычисляют на основании принимаемых одночастотных L1 сигналов GPS, корректируемых либо данными наземной станции GBAS, либо спутниковыми данными SBAS в зависимости от их доступности.
Новые спутниковые группировки, например, входящие в состав европейской системы GALILEO, и новые частоты передачи спутников (частота L5 в дополнение к частоте L1) позволяют улучшить доступность, точность, непрерывность и достоверность локализации и скорости самолета.
Как было указано выше, одноканальная архитектура, показанная на фиг. 3, относительно функции GLS не позволяет выдавать сигналы с высоким уровнем достоверности, способные обеспечивать поддержку заходов на посадку категории III, учитывая риск не обнаруживаемой погрешности модуля GNSS 306.
Архитектура многорежимного приемника MMR, применяющего функцию содействия заходу на посадку GLS с высоким уровнем достоверности в соответствии с изобретением
На фиг. 4 представлена архитектура приемника MMR в соответствии с изобретением, применяющая функцию содействия навигации GLS. Элементы, общие для архитектур, показанных на фиг. 3 и 4, обозначены одинаковыми позициями.
Приемник GNSS 306 с архитектурой, показанной на фиг. 3, заменен приемником GNSS 401 в соответствии с изобретением, который встроен в обычную структуру существующего устройства MMR, чтобы сделать его совместимым с требованиями захода на посадку и приземления в режиме GLS категории III.
Приемник GNSS 401 содержит два несхожих модуля GNSS 402, 403, работающих в соответствии с конфигурацией «ведущий-ведомый».
Приемник GNSS 401 выполнен на основе платы, на которой физически расположены оба модуля GNSS 402, 403 и которая выполняют роль механического и электрического интерфейса модуля с устройством, в котором он установлен. Под электрическим интерфейсом следует понимать, в частности, линии питания модуля, соединение с антенной, шину цифровых данных и дискретные цифровые входы/выходы. Эта плата содержит выключатель 405 на цифровой шине, который направляет вычисленные данные для нужд функции содействия посадке GLS. Активацию этого выключателя осуществляют при помощи «логического ИЛИ» дискретных команд, выдаваемых каждым из модулей GNSS 402, 403.
Первый ведущий модуль GNSS 403 выполнен с возможностью приема и обработки сигналов GNSS, поступающих от нескольких группировок радионавигационных спутников, например, группировок системы GPS или системы GALILEO, и передаваемых на нескольких разных частотах. Он содержит, по меньшей мере, модуль 431 обработки радионавигационного сигнала и выделения из него радионавигационных данных GNSS или данных GNSS, дополненных системой SBAS. На основании измерений, выдаваемых этим первым модулем 431 обработки сигнала, второй модуль 432 выдает данные о положении, необходимые для содействия навигации, третий модуль 433 выдает данные наведения на основании измерений GNSS, дополненных поправками, получаемыми от системы функционального дополнения SBAS, и четвертый модуль 434 выдает данные наведения на основании измерений GNSS, дополненных поправками, получаемыми от наземной системы функционального дополнения GBAS.
Изобретение касается именно четвертого модуля 434, выходы которого используют для осуществления функции содействия процедуре захода на посадку GLS.
Второй модуль GNSS 402, работающий в режиме ведомого модуля по отношению к первому модулю GNSS 403, тоже содержит модуль 421 обработки радионавигационного сигнала и выделения из него радионавигационных данных GNSS и модуль 422, который выдает данные наведения на основании измерений GNSS, дополненных поправками, получаемыми от наземной системы функционального дополнения GBAS.
Предпочтительно второй модуль GNSS 402 является модулем, совместимым только с одним типом группировок GNSS и только с одной частотой. Главной функцией этого ведомого модуля 402 является контроль первичного канала 403 функции захода на посадку GLS.
Каждый модуль GNSS дополнительно содержит компаратор 435, 423, выполненный с возможностью сравнения данных наведения, выдаваемых каждым модулем. После осуществления такого перекрестного сравнения каждый компаратор 435, 423 выдает информацию в направлении выключателя 405, касающуюся достоверности измерения, выдаваемого модулем 434 вычисления данных наведения ведущего модуля GNSS 403. Перекрестное сравнение осуществляют для того, чтобы обезопасить себя от неисправности, которая может возникнуть в одном из двух компараторов 423, 435. В случае применения только одного компаратора его неисправность может привести к отсутствию указания на ошибку достоверности на выходе данных наведения.
Предпочтительно ведущий модуль GNSS 403 передает на ведомый модуль 402 набор данных, позволяющих ему работать в ведомом режиме.
Плата приемника GNSS 401 в соответствии с изобретением обеспечивает также связь между всеми функциями, установленными между двумя модулями GNSS 402, 403.
Виды обработки, необходимые для работы ведущего модуля GNSS 403
Ведущий модуль GNSS 403 осуществляет все виды обработки, необходимые для автономной работы приемника GNSS. В частности, он производит сбор и отслеживание сигналов на разных частотах и от разных группировок, декодирование сообщений GNSS, вычисление положения для навигации, а также вычисление положения и отклонений наведения GBAS.
Для выработки отклонений наведения GBAS ведущий модуль GNSS 403 должен применять набор перечисленных ниже стандартных видов обработки. В частности, он должен производить фильтрацию, усиление и дискретизацию принятого радионавигационного сигнала, идентификацию списка спутников GNSS, видимых для приемника, на основании данных, находящихся в распоряжении приемника (альманахи или эфемериды, получаемые из декодированных сообщений, передаваемых спутниками GNSS, известное расчетное положение самолета…). Кроме того, ведущий модуль GNSS 403 должен выявлять и отслеживать сигналы GNSS видимых спутников GNSS при помощи локальной копии принимаемого сигнала, вырабатывать измерения псевдорасстояния, необходимые для вычисления данных положения, скорости и времени, называемых также данными PVT, на основании несущей фазы и кодовой фазы локальной копии, приведенной в соответствие с принятым сигналом, демодулировать и извлекать сообщения, переданные при помощи сигналов GNSS, которые содержат параметры, необходимые для вычисления точного положения передающего спутника (эфемериды и параметры спутникового времени), проверять достоверность декодированных сообщений при помощи данных, содержащихся в сообщении VDB, корректировать и идентифицировать достоверные псевдорасстояния при помощи данных, содержащихся в сообщении VDB, вычислять и подтверждать решение данных PVT (положение, скорость и время) на основании скорректированных псевдорасстояний, оценивать погрешность в вычисленных данных PVT, вычислять боковое и вертикальное отклонение между вычисленным решением PVT и путем захода на посадку, описанном в сообщении VDB. Наконец, компаратор 435 должен контролировать достоверность измерения отклонения посредством сравнения данных, вычисленных ведущим приемником 403, с данными, вычисленными ведомым приемником 402.
Работа в режиме «ведущий-ведомый» между двумя модулями GNSS 402, 403
Ведущий модуль GNSS 403 передает на ведомый модуль GNSS 402 некоторые данные таким образом, чтобы ему не нужно было производить избыточную обработку, уже осуществленную ведущим модулем. В частности, на ведомый модуль передается список видимых спутников, а также сообщения, выделенные из принятых сигналов GNSS, такие как эфемериды и параметры спутникового времени.
На основании этой информации ведомый модуль GNSS 402 осуществляет следующие виды обработки: фильтрацию, усиление и дискретизацию частотной полосы GNSS, поиск и отслеживание сигналов GNSS от видимых спутников в зависимости от данных, передаваемых ведущим модулем 403, и при помощи локальной копии принимаемого сигнала. Затем ведомый модуль вырабатывает измерения псевдорасстояний, необходимые для вычисления PVT для функции GLS на основании несущей фазы и кодовой фазы локальной копии, приведенной в соответствие с принятым сигналом. Он проверяет достоверность сообщений, поступающих от ведущего модуля 403, при помощи данных, содержащихся в сообщении VDB, корректирует и идентифицирует достоверные расстояния при помощи данных, содержащихся в сообщении VDB, вычисляет и подтверждает измерения PVT на основании скорректированных псевдорасстояний, оценивает погрешность, влияющую на вычисленные измерения PVT, вычисляет боковое и вертикальное отклонение между вычисленным измерением PVT и путем захода на посадку, описанным в сообщении VDB, и, наконец, контролирует достоверность бокового отклонения, сравнивая 423 данные, вычисленные этим ведомым модулем 402, с данными, вычисленными ведущим модулем 403.
Для обеспечения оптимальной работы избыточная обработка между двумя модулями GNSS исключена. В частности, виды обработки, осуществляемые ведомым модулем GNSS 402, служат только для проверки достоверности выдаваемых данных наведения GLS с временем подачи тревожного сигнала, меньшим заранее определенного времени порядка двух секунд.
В частности, можно ослабить требования фильтрации (по ширине полосы, по крутизне режекции за пределы полосы, по изменению группового времени в полосе) и требования к коррелятору, используемому для согласования локальных сигналов, генерируемых приемником, с сигналами GNSS, передаваемыми спутниками. Кроме того, требование к периоду обновления вычислений измерения PVT и отклонения тоже можно ослабить и привести к периоду, совместимому с временем подачи тревожного сигнала в две секунды.
Таким образом, второй модуль GNSS 402 производит только те виды обработки, которые необходимы для выработки второго набора данных наведения для сравнения с первым набором, выдаваемых первым модулем 403, чтобы повысить достоверность этих измерений.
Каждый из двух модулей 402, 403 осуществляет перекрестное сравнение выдаваемых измерений для управления выключателем 405 передачи отклонений GLS.
Предложенная архитектура остается в силе как для случая, когда приемник выдает отклонения GLS сразу, так и для случая, когда приемник выдает дифференциальные положения, корректируемые при помощи данных GBAS. В этом последнем случае вычисление отклонений и контроль вычисленных отклонений осуществляют соответственно вычислительные устройства 303, 304 системы ILS.
Предпочтительно приемник GNSS 401 выполнен с возможностью интегрирования в многорежимное устройство MMR, архитектура которого описана со ссылками на фиг. 4.
В других версиях выполнения изобретения, описанных со ссылками на фиг. 5 и 6, его можно также интегрировать в гибридную систему GNSS с инерциальным устройством типа GIRS, или он может работать как автономный приемник GNSS.
На фиг. 5 схематично представлена архитектура объединенной системы MMR и GIRS. Общие элементы, уже описанные на фиг. 3 и 4, обозначены теми же позициями.
Ведущий приемник GNSS 403 параллельно осуществляет две функции: с одной стороны, функцию навигации GNSS 433, выходы которой можно сочетать с инерциальными системами (IRS) для повышения характеристик доступности, достоверности и непрерывности навигации и, с другой стороны, функцию захода на посадку GNSS 434, выходы которой переключатель 312 выбирает или не выбирает в зависимости от запрашиваемого пользователем типа захода на посадку, то есть ILS, MLS или GLS.
Для приложения типа MMR, описанного со ссылками на фиг. 4, интегрирование двойного канала GNSS в соответствии с изобретением в устройство MMR позволяет оптимизировать применение функции захода на посадку GNSS, которая находится вблизи функций захода на посадку ILS/MLS и вычислительного устройства 312 выбора данных. Вместе с тем, оно не оптимизирует применения функции навигации по причине отсутствия близости с внешней инерциальной системой IRS.
Архитектура, представленная на фиг. 5, предназначена для приближения навигационной функции GNSS 434 к инерциальной системе IRS 504. Комплекс, образованный ведущим модулем GNSS 403, инерциальной системой IRS 504, а также вычислительным устройством 502 гибридизации навигационных данных, представляет собой устройство 502, называемое GIRS (GNSS-Inertial Reference System). Преимуществом этой архитектуры является оптимизация достоверности, непрерывности и доступности навигационного решения за счет приближения функции GNSS с инерциальной функции. Совместное использование устройства 502 GIRS и устройства 501 MMR позволяет обеспечить несхожесть видов обработки GNSS, необходимую для операций захода на посадку категории III. Это позволяет оптимизировать функцию захода на посадку GNSS за счет ее размещения вблизи устройства MMR и функцию навигации за счет ее размещения вблизи инерциальной системы 504. Эта архитектура является версией осуществления изобретения.
На фиг. 6 схематично представлена другая версия выполнения изобретения, в которой заявленный приемник GNSS 601 разработан для автономной работы. В этом случае устройства, относящиеся к системе ILS, являются внешними по отношению к самому приемнику GNSS 601. Отличие от применения в устройстве MMR состоит в том, что переключатель 312 находится внутри приемника GNSS 601, тогда как он был внешним в случае применения в многорежимной системе MMR.
Применение функции сравнения данных GLS каждого модуля GNSS
Далее следует более детальное описание применения компаратора 423, 435 данных, выдаваемых каждым модулем GNSS 402, 403. Целью этого сравнения является ограничение количества необнаруженных неисправностей, когда они влияют на тот или иной из модулей, а также когда на эти модули одновременно влияет ошибка, имеющая общий источник.
Данными, выдаваемыми каждым модулем GNSS, достоверность которых необходимо контролировать, являются, в частности, но не ограничительно следующие данные: дифференциальное горизонтальное положение GBAS, курс на выбранную посадочную полосу, линеаризованное боковое отклонение, линеаризованное вертикальное отклонение, вертикальное расстояние до LTP/FTP, боковое отклонение, вертикальное отклонение, расстояние до порога полосы и параметры захода на посадку, такие как угол захода на посадку, выбранная посадочная полоса, или активное обслуживание GBAS захода на посадку.
В дальнейшем под данными наведения следует понимать совокупность данных, выдаваемых каждым модулем GNSS, в частности, представленных в вышеуказанном списке, достоверность которых необходимо контролировать.
Когда оба канала обработки GNSS используют одинаковые сигналы GNSS и, следовательно, одинаковые спутниковые измерения, ошибки, связанные с дефектами, общими для обоих каналов, взаимно уничтожаются, когда вычисляют разность между данными наведения, выдаваемыми двумя каналами.
Однако каждый из двух модулей GNSS имеет свое собственное время или локальную базу времени, и осуществляемые вычисления происходят в независимые моменты. Таким образом, когда вычисляют разность между данными наведения, выдаваемыми каждым каналом, появляется остаточная погрешность, вытекающая из асинхронности измерений, производимых каждым модулем.
Например, в случае, когда данными наведения является горизонтальное положение, в разность ΔPOS между двумя вычисленными горизонтальными положениями вкрадывается погрешность, которая связана с этой асинхронностью и с динамикой самолета и которую можно количественно определить при помощи следующего отношения:
 ,
,
где V является горизонтальной скоростью самолета, а является горизонтальным ускорением самолета, j является дополнительным горизонтальным ускорением самолета, ε является остаточной динамикой более высокой степени, которую можно считать ничтожной, и ΔТ является временной разницей, появляющейся по причине асинхронности вычислений между двумя модулями GNSS.
На практике разница ΔТ составляет около 100 мс, что может привести к погрешности между двумя измеренными положениями, которое может достигать 41,2 м для навигации и 12,8 м при заходе на посадку.
Далее следует описание двух методов, позволяющих компенсировать остаточную погрешность (ΔPOS).
Первый метод состоит в применении вычисленной горизонтальной скорости для компенсации временной разницы между двумя вычисленными горизонтальными положениями.
Для этого, если первый модуль GNSS выдает набор навигационных данных PaVaTa и второй модуль GNSS выдает набор навигационных данных PbVbTb, где Ра, Pb обозначают измерение положения, Va, Vb обозначают измерение скорости, и Ta, Tb обозначают измерение времени, разность ΔPOS необходимо вычислять следующим образом:

то есть разность между двумя положениями компенсируется членом Va(Tb-Ta), который содержит информацию, необходимую для компенсации временного смещения между измерениями, осуществляемыми каждым каналом.
Согласно второму методу, убеждаются, что данные наведения PVT, вычисляемые каждым каналом, являются синхронными с характеристической составляющей принимаемого сигнала GNSS. Например, в случае сигнала GPS присутствующий в сигнале рисунок, обычно обозначаемый сокращением 1PPS, можно использовать для синхронизации данных наведения с заранее определенным максимальным смещением, например, равным 500 мкс. Таким образом, временное смещение между двумя каналами гарантировано в значении плюс или минус 1 мс, что приводит к максимальному отклонению между двумя положениями, связанному с динамикой самолета и составляющему примерно 4 см, которым можно пренебречь по сравнению с ожидаемой вариацией на отклонении между положениями ΔPOS.
Преимуществом этого второго метода является то, что его осуществляют без учета спорости Va, вычисляемой первым модулем GNSS, достоверность которой не всегда может быть гарантирована.
Компенсация погрешности в разности ΔPOS между двумя горизонтальными положениями позволяет скорректировать асинхронность между двумя модулями GNSS для всех рассматриваемых данных наведения, так как все они зависят от горизонтального или вертикального положения самолета.
Далее следует более подробное описание применения функции перекрестного сравнения навигационных данных. При этом предполагается, что предварительно был использован один или другой из описанных выше методов для компенсации асинхронности вычислений между двумя модулями GNSS.
Сначала будет описано применение функции сравнения для конкретных данных наведения, таких как горизонтальное положение.
В данном случае функция сравнения состоит в сравнении нормы разности двух вычисленных горизонтальных положений с критерием, равным произведению заданного порога обнаружения Kpos и квадратного корня вариации этой разности. Отношение (1) иллюстрирует этот критерий:


Предпочтительно вариацию разности горизонтальных положений можно вычислить из следующих отношений, проиллюстрированных на фиг. 7.

где при х=1 или 2, 



Переменные s1,j и s2,j являются составляющими взвешенной матрицы проекции, используемой для вычисления положения.
Переменная σRx,i, выраженная в метрах, соответствует мажоранте типового отклонения остаточной погрешности расстояния между i-ым видимым спутником и приемной антенной GNSS, используемой для вычисления положения каждым модулем GNSS, обозначенным индексом х, при этом х меняется от 1 до 2. Эта остаточная погрешность происходит от источников ошибок, влияющих на работу самого модуля GNSS, но не от источников ошибок, влияющих на сигнал GNSS, передаваемый спутником, таких как ошибки, связанные с распространением сигнала. Таким образом, обнаружение неисправности между двумя каналами становится более точным и не повышает возможность ложных тревог, так как источники ошибок, влияющие на сигнал GNSS, воспринимаются обоими каналами идентично и взаимно уничтожаются во время вычисления разности положений, выдаваемых каждым каналом. Отказ от включения этих источников ошибок в отслеживание разности положений не повышает степени подачи ложной тревоги.
Оценочное значение типового отклонения σRx,i выдают соответствующие модули 421, 431 обработки сигнала каждого модуля GNSS.
Остаточная погрешность, измеряемая при помощи этой вариации, связана, в частности, с тремя источниками, что показано следующим отношением:




В частности, при вычислении вариации отклонения положений не учитывают следующие источники ошибок:
- остаточная погрешность после применения поправок, полученных из данных дополнения GBAS. Эта погрешность является общей для обоих модулей GNSS, которые используют один и тот же источника для получения данных дополнения,
- остаточная погрешность, связанная с влиянием распространения спутниковых сигналов в тропосфере. Эта погрешность является общей для обоих модулей GNSS, которые используют одну и ту же антенну или две близкие антенны,
- остаточная погрешность, связанная с влиянием распространения спутниковых сигналов в ионосфере. Эта погрешность является общей для обоих модулей GNSS, которые используют одну и ту же антенну или две близкие антенны.
Таким образом, все источники ошибок, общие для двух модулей, исключены из вычисления вариации с целью улучшения критерия сравнения, выраженного отношением (1), чтобы учитывать только источники ошибок, декоррелированные между двумя модулями.
Таким образом, функция сравнения 423, 435, применяемая в каждом модуле GNSS, осуществляет следующие этапы:
- вычисление разности горизонтальных положений,
- вычисление вариации этой разности на основании типовых отклонений погрешности σRx,i, оцениваемых каждым модулем обработки сигнала GNSS,
- применение критерия обнаружения ошибки, определенного отношением (1),
- если критерий оказывается положительным, делают вывод о присутствии ошибки достоверности, и включается тревожный сигнал, в противном случае делают вывод о достоверности вычисленных навигационных данных.
На практике заранее определяют порог обнаружения Kpos, чтобы минимизировать вероятность подачи ложной тревоги и максимизировать вероятность обнаружения ошибки на одном из двух каналов. Для этого, согласно одной из возможностей, предполагают, что разность ΔPOS является гауссовой переменной, и порог Kpos определяют на основании известной кривой Гаусса. Эта кривая классически дает для гауссовой переменной Х значение выбираемого порога К таким образом, чтобы соотношение между нормой Х и квадратным корнем Х превышало данное значение в процентах.
Иначе говоря, определение порога обнаружения Kpos осуществляют таким образом, чтобы достичь компромисса между потерей характеристики непрерывности функции сравнения при слишком низком пороге Kpos, который может привести к ложным тревогам (обнаружение ошибки там, где ее нет), и потерей характеристики достоверности функции сравнения при слишком высоком пороге, который может привести к отсутствию обнаружения ошибки.
Таким образом, определение порога Kpos должно быть основано на анализе надежности работы, которая позволяет соблюдать как требование непрерывности (отсутствие потери функции во время критической фазы захода на посадку), так и требование достоверности выходных данных.
Чтобы привести пример вычисления этого порога, предположим, что система захода на посадку самолета допускает только вероятность потери непрерывности, равную 10-5, за время влияния в 1 минуту (продолжительность фазы захода на посадку/приземления) и что вероятность необнаруженной ошибки горизонтального положения превышает заданное значение VAL, например, равное 10 м, и должна быть ниже 10-9 за это же время влияния.
Чтобы удовлетворить эти требования, на первом этапе производят анализ материальных сбоев и их последствий для определения вероятности появления неисправности, которая может привести к нарушению работы функции захода на посадку, принимая во внимание все задействованные элементы (антенна СВЧ, приемник VDB, антенна GPS, один из каналов приема GPS, питание энергией…). Предположим, что этот анализ привел к вероятности неисправности в 5·10-6 за минуту. Предположим также, что этот анализ привел к выводу, что только 10% идентифицированных неисправностей могут привести к ошибке достоверности выходов одного из двух каналов GNSS.
Если считать, что нарушение непрерывности происходит в случае неисправности, либо в случае ложной тревоги механизма отслеживания, требование непрерывности в 10-5/мин и степени неисправности в 5·10-6/мин предполагает, что эта степень ложной тревоги должны быть ниже 5·10-6/мин (=10-5/мин - 5·10-6/мин).
Если считают, что существует ошибка достоверности по причине неисправности и что эта неисправность приводит к ошибке достоверности на одном из двух выходов и что эта ошибка не обнаруживается механизмом отслеживания, значит, чтобы достичь вероятности необнаруженной погрешности 10-9/мин, необходимо, чтобы степень обнаружения ошибки горизонтального положения превышала 2·10-3/мин (=10-9/мин/(5·10-6/мин*10%).
Фильтрации, применяемые в приемниках GNSS, приводят к сильной корреляции выходных данных при заходе на посадку: таким образом статистически рассматривают только один отдельный цикл для определения вероятности ложной тревоги или необнаруженной ошибки за общую продолжительность влияния в одну минуту.
Устанавливают порог Kpos, чтобы выдерживать вероятность ложной тревоги в значении 5·10-6. Для нормализованного гауссова распределения это соответствует определению порога Kpos, превышающего или равного 4,6:
В целом порог обнаружения Kpos должен проверять условие, определенное следующим неравенством
 ,
,
где Pfa является искомой вероятностью ложной тревоги.
В случае ошибки β на одном из двух каналов, приводящей к ошибке достоверности (то есть β≥10 м), распределение отклонения горизонтального положения мажорируют при помощи гауссовой кривой с центром на β и типового отклонения
При этом вероятность необнаружения выражают следующими формулами:
Чтобы удерживать степень обнаружения ошибки в значении, превышающем 2·10-3, необходимо зафиксировать порог Kpos при помощи следующего отношения:
 .
.
С точки зрения характеристик системы GNSS получаем:

HDOPmax определяют в стандартах GPS в значении 1,5, рассматривая спутники с возвышением более 5° и номинальную группировку из 24 спутников GPS и рассматривая 99% возможных положений на земле и во времени.
При рассмотрении спутников с возвышением более 5° стандарты GPS определяют:
- max(σdiv,i)=0,25 м
- max(σnoise,i)=0,15 м
- max(σmultipath,i)=0,45 м
Таким образом, max(σRx,i)=0,54 м и, следовательно, max(
Таким образом, чтобы соблюдать требования непрерывности и достоверности, необходимо брать пороговое значение Kpos в интервале [4,6; 9,4]. Например, можно взять значение в середине интервала Kpos=7.
Эквивалентный метод применяют для проверки достоверности других типов данных наведения. В частности, предложен критерий обнаружения ошибок, эквивалентный критерию, выражаемому отношением (1), для частного случая горизонтального положения.
Далее следует описание выработки этого критерия для проверки достоверности измерений бокового, бокового прямолинейного, вертикального, вертикального прямолинейного отклонений, а также расстояния до порога посадочной полосы.
На фиг. 9 схематично представлены параметры, применяемые во время процедуры захода на посадку с целью приземления на полосе 901 по оси приземления 902. Эти параметры поступают от станции GBAS через линию связи VDB. Летательный аппарат следует по пути 903 захода на посадку, определяемому углом θGPA между направлением, образованным этим путем 903, и локальной плоскостью посадочной полосы 901 в точке PLTP/FTP, которая соответствует порогу полосы в системе координат, неподвижной относительно Земли, например, в системе координат ECEF (Earth Centered Earth Fixed). Кроме того, финальную фазу захода на посадку определяют следующими параметрами: точка FPAP (Flight Path Alignment Point), точка GARP конца полосы, расстояние ΔLO между точками FPAP и GARP, высота ТСН пути захода на посадку над точкой PLTP/FTP, параметр CW (Course Width), используемый для нормализации бокового отклонения в масштабе значений, используемом в системе ILS, и точка GPIP пересечения между путем 903 захода на посадку и горизонтальной плоскостью 904. От точки PLTP/FTP образуют прямую ортогональную систему координат (PLTP/FTP,



Боковое отклонение αlat,Rx вычисляют на основании параметров захода на посадку при помощи следующего отношения:
 ,
,
где
 .
.
PRx является измерением положения в системе координат на Земле, вычисляемым каждым модулем GNSS.
Разность между боковыми отклонениями, вычисляемыми каждым модулем GNSS, получают при помощи следующего отношения:

Вариацию этой разности получают при помощи следующего отношения:
 ,
,
где


 и θ является курсовым углом полосы относительно направления на Север, вычисленным на основании параметров, передаваемых системой GBAS.
и θ является курсовым углом полосы относительно направления на Север, вычисленным на основании параметров, передаваемых системой GBAS.
Чтобы проверить достоверность измерений бокового отклонения, осуществляемых каждым модулем GNSS, согласно критериям, аналогичным критериям, используемым для случая горизонтального положения, определяют порог обнаружения Klat таким образом, чтобы минимизировать вероятность ложной тревоги и максимизировать вероятность обнаружения ошибки вычисления бокового отклонения на одном из двух каналов. Таким образом, срабатывает тревожный сигнал ошибки достоверности по боковому отклонению, если соблюдается следующий критерий
 ,
,
который можно выразить более просто

На основании параметров захода на посадку можно также вычислить боковое прямолинейное отклонение следующим образом

Аналогично, чтобы проверить достоверность измерений бокового прямолинейного отклонения, определяют порог обнаружения Krectlat таким образом, чтобы минимизировать вероятность ложной тревоги и максимизировать вероятность обнаружения ошибки вычисления бокового отклонения на одном из двух каналов, и срабатывает тревожный сигнал ошибки достоверности по боковому отклонению, если соблюдается следующий критерий:
 ,
,
который может также записать в виде:
 .
.
Критерии проверки достоверности данных наведения, касающихся вертикального отклонения, вертикального прямолинейного отклонения и расстояния до порога полосы, устанавливают аналогично при помощи отношений (4), (5) и (6):
Отношение (4) можно также записать в виде:
 ,
,
где
Отношение (5) можно также записать в виде
 ,
,
где  .
.
Отношение (6) можно также записать в виде:
 ,
,
где  .
.
Что касается курса θ выбранной посадочной полосы, разность между измерениями курса, вычисленными двумя каналами, должна приводить к тревожному сигналу достоверности без допуска на отклонение между двумя измерениями, так как оба канала должны использовать одинаковые данные GBAS.
В целом критерий проверки достоверности данных наведения Xg, два измерения Xg1, Xg2 которой выдают соответственно первый ведущий модуль GNSS и второй ведомый модуль GNSS двухканального устройства в соответствии с изобретением, можно установить при помощи следующего общего отношения (7)

Kg является порогом обнаружения, заранее определенным таким образом, чтобы минимизировать вероятность ложной тревоги Pfa, то есть вероятности того, то сработает тревожный сигнал достоверности, тогда как измерения Xg1, Xg2 являются достоверными, и одновременно максимизировать вероятность обнаружения реальной ошибки, влияющей на то или иное или на оба измерения Xg1, Xg2 одновременно.
В частном варианте выполнения изобретения, указанном выше для частного случая измерения горизонтального положения, порог обнаружения Kg определяют при помощи следующих двух отношений:
 и
и

где Pnd является вероятностью необнаружения ошибки, и VAL является предельным значением ошибки на одном из измерений Xg1, Xg2, сверх которого считают, что существует ошибка достоверности в выходных данных Xg1, Xg2 одного из двух модулей.
Иначе говоря, значение VAL является допустимым предельным значением ошибки на одном из измерений Xg1, Xg2, ниже которого предполагается, что достоверность упомянутых измерений гарантирована.
Критерий проверки достоверности (7) позволяет, в частности, улучшить характеристики по вероятности обнаружения для ошибок, общих для обоих измерений Xg1, Xg2.
Согласно изобретению, тревожный сигнал достоверности срабатывает, если подтверждается отношение (7).
Предпочтительно вариацию погрешности между двумя измерениями Xg1, Xg2 можно определить на основании параметров процедуры захода на посадку и минимизировать посредством исключения ошибок, общих для двух каналов, и коррекции асинхронности двух каналов.
Методы, обеспечивающие несхожесть двойной архитектуры «ведущий-ведомый» согласно изобретению
Чтобы повысить уровень достоверности системы GLS, согласно изобретению, осуществляют перекрестное сравнение измерений наведения, выдаваемых каждым модулем GNSS, чтобы исключить ошибочные измерения, когда ошибка касается только одного или другого из модулей. Однако даже при осуществлении такого перекрестного сравнения не обнаруживаются некоторые ошибки, которые влияют одновременно на два модуля. Чтобы решить эту проблему, предложено решение, согласно которому вводят несхожесть между двумя каналами обработки GNSS, чтобы максимально ограничить появление ошибок, связанных с источниками, общими для обоих каналов.
Ниже следует описание нескольких методов, позволяющих сделать несходной двойную архитектуру в соответствии с изобретением.
Следующие элементы могут быть затронуты дефектом, который может повлечь за собой ошибку достоверности в измерениях наведения, выдаваемых на выходе приемником GNSS:
- блок фильтрации, состоящий из фильтров на частоте приема сигнала GNSS, а также на промежуточных частотах,
- средства синтеза частоты приемника GNSS, в частности, опорный генератор колебаний, осуществляющие синтез компоненты локальных генераторов колебаний и тактового генератора дискретизации на основании опорного генератора колебаний, аналоговый микшер для транспонирования частоты GNSS в промежуточные частоты перед дискретизацией, средства питания аналоговых частей с нежелательным эффектом генерирования паразитных полос, по-разному влияющих на прием сигналов GNSS,
- средства питания предварительного усилителя антенны GNSS с нежелательным эффектом генерирования паразитных полос на входе схемы приема GNSS,
- средства питания цифровой части приемника с нежелательным эффектом генерирования ошибок при выполнении обработок, необходимых для вычисления, и на выходе отклонений,
- функция генерирования локальных сигналов, корреляции и отслеживания сигналов, поступающих от спутников GNSS, с нежелательным эффектом необнаруживаемых систематических погрешностей при определении псевдорасстояний и, следовательно, потенциально на вычисляемых отклонениях,
- программные алгоритмы, определенные нормами стандартов GNSS, такие как алгоритмы подтверждения эфемерид и временных данных GNSS; определения, фильтрации, коррекции и подтверждения псевдорасстояний между наблюдаемыми спутниками и приемником; вычисления; подтверждения и оценки точности измерений положения, скорости и времени PVT; вычисления и выдачи отклонений на выходе.
Среди вышеупомянутых дефектов часть из них может привести к одновременной погрешности на обоих каналах GNSS, которая может быть не обнаружена при взаимном контроле каналов между собой. В частности, речь идет о следующих дефектах:
- дефект материальной конструкции, приводящий к одинаковой чувствительности к специфической механической или термической среде: в основном это относится к аналоговым компонентам и, в частности, к фильтрам и компонентам синтеза частоты,
- дефект материальной конструкции, вытекающий из дефекта общего электрического питания обоих каналов,
- дефект программирования, связанный с конфигурацией группировки GNSS и со специфическими характеристиками передаваемого сигнала GNSS,
- концептуальный дефект, проявляющийся в конкретной среде интерференции и множественных путей сигнала GNSS, например, связанный с отражениями сигнала GNSS от препятствий, окружающих антенну,
- дефект программирования, связанный с конкретной конфигурацией данных, передаваемых наземной станицей GBAS (данные идентификации, аутентификации, коррекции, описания пути захода на посадку…),
- дефект программирования, связанный с конкретным случаем положения самолета и текущего времени.
Для обработки вышеперечисленных общих источников неисправности необходимо обеспечить несхожесть реакции двух каналов, чтобы их можно было отслеживать при помощи совместного механизма контроля между каналами.
Первый метод состоит в разном выполнении двух каналов с точки зрения материальных и/или программных средств.
Что касается материальных средств, несхожести можно достичь посредством использования разных компонентов, в частности, что касается компонентов, являющихся источником погрешности достоверности. Компонентами, которые предпочтительно следует выполнять по-разному между двумя каналами, являются компоненты, осуществляющие питание аналоговых частей, опорных генераторов колебаний, синтезаторов частоты, смесителей, аналоговых фильтров и процессоров цифровой обработки сигнала.
Что касается программных средств, несхожести можно достичь посредством привлечения разных групп разработчиков, использования разных языков программирования или разных инструментов и компиляционных вариантов, разных методов топографии (mapping) памяти, в частности, для памяти программирования, памяти данных или энергонезависимой памяти данных.
Другим элементом двухканального приемника GNSS в соответствии с изобретением, который может быть общим источников ошибки достоверности, является антенна приема сигналов GNSS и, в частности, питание предварительного усилителя антенны.
На фиг. 8а, 8b и 8с схематично представлены три возможные архитектуры, в которых используют одну или две антенны для связи с двумя модулями GNSS заявленного приемника.
На фиг. 8а показана архитектура 801 с одной антенной, в корой используют делитель 803 для деления мощности, поступающей от предварительного усилителя 802 антенны 801, с целью питания каждого модуля GNSS 804, 805 двухканального приемника в соответствии с изобретением.
В архитектуре, показанной на фиг. 8а, предварительный усилитель 802 антенны 801 является общим источником ошибки достоверности для обоих модулей GNSS 804, 805.
Чтобы ввести несхожесть на входе схемы обработки радионавигационного сигнала, предложена архитектура, показанная на фиг.8b, в которой две отдельные антенны 811, 812 соединены, каждая, с одним из модулей GNSS 804, 805 через два отдельных предварительных усилителя 821, 822, которые, таким образом, не наводят общих ошибок.
В архитектуре, показанной на фиг. 8b, поскольку обе антенны выполнены раздельно, механизм перекрестного отслеживания должен учитывать различие между выходами двух антенн, связанное с их разными положениями. Для этого можно применять два метода. Первый метод состоит в том, что к критерию отслеживания, выраженному отношением (7), добавляют максимальную систематическую погрешность b, вычисляемую на основании априорного знания расстояния между двумя антеннами. Преимуществом этого метода является то, что он использует только абсолютное значение расстояния между двумя антеннами. Отношение (7) принимает вид:

при этом b предпочтительно можно определить на основании параметров процедуры захода на посадку.
Для отслеживания горизонтального положения, расстояния до порога полосы, а также вертикальных и горизонтальных прямолинейных отклонений систематическую погрешность b можно принять равной абсолютному расстоянию между двумя антеннами, в дальнейшем обозначаемому dant.
Для отслеживания боковых отклонений систематическую погрешность b можно вычислить при помощи следующего отношения:

Для отслеживания вертикальных отклонений систематическую погрешность b можно вычислить при помощи следующего отношения:
Второй метод, применяемый для архитектуры, показанной на фиг. 8b, состоит в перемещении оценочного положения к общей точке отсчета летательного аппарата. Относительные положения двух антенн и общей точки отсчета известны из приемников в системе координат летательного аппарата и могут быть проецированы в системе координат GNSS с использованием данных высоты полета, поступающих в приемники от бортовой инерциальной системы. При этом оба приемника могут использовать вектор, соединяющий их антенну с общей точкой отсчета, для коррекции данных наведения до сравнения их разности с К-кратным оценочным значением их типового отклонения. Преимуществом этого метода по сравнению с первым является то, что он позволяет не ослаблять критерии отслеживания и сохранять вероятность обнаружения ошибки на одном из двух каналов.
Альтернатива этой архитектуры с двойной антенной показана на фиг. 8с. Она состоит в использовании только одной антенны 831, на выходе которой располагают делитель 832, который делит принятый сигнал и направляет его соответственно на два предварительных усилителя 833, 834. Преимуществом этой архитектуры является то, что она позволяет минимизировать источники ошибок, общие между двумя каналами, и одновременно избегать дополнительных сложностей в механизмах отслеживания за счет использования одной и той же пассивной антенны и, следовательно, одного опорного значения положения, вычисленного двумя каналами приема GNSS.
Использование разных материальных и/или программных средств для каждого модуля GNSS является первым методом введения несхожести в двухканальный приемник в соответствии с изобретением.
Второй метод позволяет использовать одни и те же материальные компоненты между двумя каналами. Он состоит в конфигурировании работы каждого из каналов по-разному, чтобы механизм отслеживания между каналами обнаруживал общий дефект на одном из материальных компонентов, идентифицированных как потенциальный источник погрешности достоверности.
Для обеспечения несхожести можно реализовать следующие конфигурации на каждом канале обработки GNSS. Приемный цифровой фильтр каждого модуля GNSS можно конфигурировать по-разному. Например, полосу пропускания фильтра ведущего модуля можно конфигурировать на широкополосный прием, тогда как полосу пропускания фильтра ведомого модуля можно конфигурировать на узкополосный прием.
В каждом модуле GNSS метод корреляции сигнала GNSS с локальной копией может быть разным. Например, для ведущего модуля GNSS можно использовать узкий коррелятор опережения-запаздывания или узкий коррелятор дубль-дельта, тогда как для ведомого модуля GNSS используют более широкий коррелятор опережения-запаздывания.
Наконец, между двумя приемными модулями GNSS можно использовать два разных частотных плана посредством конфигурирования частотных синтезов локальных генераторов колебаний и частоты дискретизации. Согласно конструкции, использование двух разных частотных планов позволяет гарантировать, что паразитные полосы, генерируемые аналоговыми компонентами изменения частоты и дискретизации, присутствуют на разных для каждого модуля частотах, фазах и амплитудах на уровне функции корреляции зашумленного принимаемого сигнала с локальным сигналом.
Учитывая, что эффект паразитной полосы зависит от ее фазы и от ее частоты, связанной с принимаемым полезным сигналом, нарушение отслеживания этого сигнала и оцениваемых псевдорасстояний является разным для двух каналов. Таким образом, сравнение между двумя каналами позволяет обнаружить такое несоответствие и избежать потенциально ошибочных отклонений на выходе.
Изобретение позволяет установить критерий отслеживания схожести выходных результатов двух каналов GNSS двухканального приемника. Критерий отслеживания определяют таким образом, чтобы минимизировать количество ложных тревог, которое создает проблему доступности функции захода на посадку, и максимизировать степень обнаружения погрешностей достоверности, которые делают неэффективным двухканальный механизм. Одной из целей изобретения является максимальное понижение критерия сравнения, не затрагивая при этом степени срабатывания ложных тревог. Исключение общих источников ошибок между двумя каналами при определении порога обнаружения и коррекция асинхронности между двумя каналами позволяют снизить порог обнаружения, не увеличивая степени срабатывания ложных тревог.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ В ЗАХОДЕ НА ПОСАДКУ С НАВЕДЕНИЕМ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2362976C1 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ДАННЫЙ МОМЕНТ И КОНТРОЛЯ ДОСТОВЕРНОСТИ ПОЛОЖЕНИЯ УПОМЯНУТОГО ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2010 |
|
RU2513551C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДСКАЗАНИЯ ЭФФЕКТИВНОСТИ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2008 |
|
RU2467352C2 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ И УСТРОЙСТВО ОБЪЕДИНЕНИЯ/КОНСОЛИДАЦИИ С МНОЖЕСТВОМ МОДУЛЕЙ ОБРАБОТКИ | 2014 |
|
RU2634693C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
Группа изобретений относится к устройству приема радионавигационных сигналов, многорежимному приемнику для содействия навигации летательного аппарата, гибридной системе содействия навигации. Устройство приема радионавигационных сигналов содержит два модуля GNSS, каждый из которых содержит средство обработки радионавигационных сигналов, средство вычисления данных наведения и средство сравнения данных обоих модулей. Многорежимный приемник для содействия навигации летательного аппарата содержит систему посадки по приборам ILS и устройство приема радионавигационных сигналов. Гибридная система содействия навигации содержит многорежимный приемник с системой посадки по приборам ILS с гибридизационной инерциальной системой GNSS-IRS, где IRC – инерциальная система, а GNSS – средство гибридизации навигационных данных, устройство приема радионавигационных сигналов. Обеспечивается точность приземления и автоматического руления самолета в условиях недостаточной видимости. 3 н. и 11 з.п. ф-лы, 9 ил. 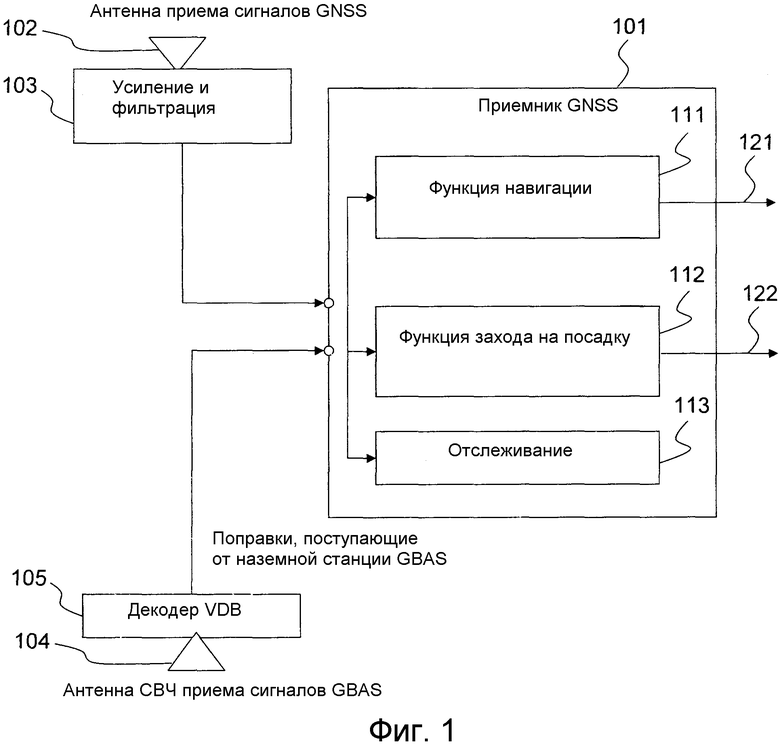
1. Устройство (401, 601) приема радионавигационных сигналов для содействия пилотированию летательного аппарата, отличающееся тем, что содержит несхожие первый ведущий модуль GNSS (403) и второй ведомый модуль GNSS (402), при этом первый ведущий модуль GNSS (403) содержит первое (431) средство обработки радионавигационных сигналов и первое средство (434) вычисления данных наведения (Xg) на основании измерений, поступающих от упомянутого первого средства (431) обработки сигналов, при этом второй ведомый модуль GNSS (402) содержит второе средство (421) обработки радионавигационных сигналов и второе средство (422) вычисления данных наведения (Xg) на основании измерений, поступающих от упомянутого второго средства (421) обработки сигналов, при этом каждый модуль GNSS (403, 402) дополнительно содержит средство (435, 423) сравнения между выходами Xg1, Xg2 упомянутых первого и второго средств (434, 422) вычисления данных наведения, выполненное с возможностью осуществления следующего теста достоверности:

и вывода об ошибке достоверности, если упомянутый тест достоверности подтверждается, при этом Kg является порогом обнаружения, заранее установленным таким образом, чтобы получить заданную вероятность Pnd
обнаружения погрешности, влияющую на одно или другое или одновременно на оба измерения Xg1, Xg2, и заданную вероятность Pfa ложной тревоги.
2. Устройство (401, 601) приема радионавигационных сигналов по п. 1, в котором порог обнаружения Kg определяют при помощи следующих двух неравенств:
где VAL является допустимым предельным значением погрешности по одному из измерений Xg1 Xg2, ниже которого гарантирована достоверность упомянутых измерений
3. Устройство (401, 601) приема радионавигационных сигналов по п.1, в котором общие источники погрешности между первым ведущим модулем GNSS (403) и вторым ведомым модулем GNSS исключены из вычисления вариации разности между выходами Xg1, Xg2 упомянутых первого и второго средств вычисления (434, 422) данных наведения.
4. Устройство (401, 601) приема радионавигационных сигналов по п. 1, в котором данные наведения (Xg) по меньшей мере равны одному из следующих данных: горизонтальное положение, боковое отклонение, боковое прямолинейное отклонение, вертикальное отклонение, вертикальное прямолинейное отклонение или расстояние до порога полосы.
5. Устройство (401, 601) приема радионавигационных сигналов по п.1, в котором средство (435, 423) сравнения предварительно осуществляет этап компенсации асинхронности между первым ведущим модулем GNSS (403) и вторым ведомым модулем GNSS по данным наведения горизонтального положения.
6. Устройство (401, 601) приема радионавигационных сигналов по п.5, в котором асинхронность компенсируют, вычисляя разность ΔPOS горизонтальных положений Pa, Pb, выдаваемых первым и вторым средством (434, 422) вычисления данных наведения, следующим образом
ΔPOS=Pb-Pa-Va⋅(Tb-Ta),
где Va является измерением скорости, выдаваемым первым средством (434) вычисления данных наведения, Ta является измерением времени, выдаваемым первым средством (434) вычисления данных наведения, и Tb является измерением времени, выдаваемым вторым средством (422) вычисления данных наведения.
7. Устройство (401, 601) приема радионавигационных сигналов по п.5, в котором асинхронность компенсируют, синхронизируя вычисленные данные наведения (Xg1, Xg2) по характеристической составляющей принятого радионавигационного сигнала.
8. Устройство (401, 601) приема радионавигационных сигналов по п.1, в котором первый и второй модули GNSS (403, 402) имеют материальную и/или программную несхожесть.
9. Устройство (401, 601) приема радионавигационных сигналов по п.1, в котором первый и второй модули GNSS (403, 402) сходны с точки зрения материальных средств, но используют следующие несхожие виды цифровой обработки: разную цифровую фильтрацию, разные корреляторы, назначение разных частотных планов.
10. Устройство (401, 601) приема радионавигационных сигналов по п.8, в котором устройство содержит отдельные антенну (811, 812) и предварительный усилитель (721, 722) для питания каждого модуля GNSS (403, 402) таким образом, чтобы ограничить общие источники ошибки достоверности.
11. Устройство (401, 601) приема радионавигационных сигналов по п.10, в котором тест достоверности изменяют следующим образом
 ,
,
где b является систематической погрешностью измерения, вычисляемой на основании априорного знания расстояния между двумя антеннами (811, 812).
12. Устройство (401, 601) приема радионавигационных сигналов по п.8, в котором устройство содержит антенну (831), средство (832) деления мощности сигнала, принимаемого антенной (831), и два отдельных предварительных усилителя (833, 834) для питания каждого модуля GNSS (403, 402) таким образом, чтобы ограничить общие источники ошибки достоверности.
13. Многорежимный приемник для содействия навигации летательного аппарата, содержащий систему посадки по приборам ILS и устройство (401, 601) приема радионавигационных сигналов по п.1 для применения функции содействия посадке GLS в фазе захода на посадку.
14. Гибридная система содействия навигации, содержащая многорежимный приемник (501), содержащий систему посадки по приборам ILS и гибридизационную инерциальную систему GNSS-IRS (502), включающую в себя инерциальную систему IRS (504), выдающую инерциальные данные, и средство (503) гибридизации навигационных данных GNSS при помощи упомянутых инерциальных данных, отличающаяся тем, что дополнительно содержит устройство приема радионавигационных сигналов по п.1, первый ведущий модуль GNSS (403) которого встроен в упомянутую инерциальную систему (502) для выдачи упомянутых навигационных данных GNSS, а второй ведомый модуль GNSS (402) встроен в упомянутый многорежимный приемник (501).
| US 5945943 A1, 31.08.1999 | |||
| US 20030130771 A1, 10.07.2003 | |||
| 0 |
|
SU100836A1 | |
| US 20110231038 A1, 22.09.2011 | |||
| УСТРОЙСТВО ПОМОЩИ В ЗАХОДЕ НА ПОСАДКУ С НАВЕДЕНИЕМ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2362976C1 |

