Область техники, к которой относится изобретение
Изобретение относится к устройству и способу управления скоростью перемещения транспортных средств для оптимизации коэффициента энергоэффективности, в частности к «облачным» вычислениям для определения оптимальных профилей скорости на основании идентифицированного маршрута и соответствующих дорожных условий, например уклона дороги.
Уровень техники
Производители транспортных средств стремятся минимизировать потребление энергии при управлении транспортным средством (например, за счет увеличения расстояния, проходимого с использованием единицы топлива для бензиновых транспортных средств или единицы электрического заряда для электрических транспортных средств). Значительное влияние на эффективность оказывает скорость, с которой двигается транспортное средство, изменение уклона дороги на маршруте и дорожная обстановка. Использование систем автоматического управления скоростью (например, круиз-контроля) может благоприятно сказаться на экономии топлива, благодаря уменьшению времени, затрачиваемого на разгон транспортного средства, в частности при движении по автомагистрали. Однако при поддержании постоянной скорости во время подъемов и спусков потребляется больше топлива, чем если скорость движения транспортного средства можно изменять с учетом различного уклона дороги для оптимизации расхода топлива. Если о предстоящих изменениях уклона известно заранее (например, при использовании GPS-карт или предварительного составления маршрута), то при настройке скорости можно ввести временные поправки, что позволит значительно снизить энергопотребление. При приближении к новому уклону может быть идентифицировано и использовано изменение скорости для уменьшения количества энергии, потребляемой при прохождении данного участка. Однако из-за ограничений масштаба и горизонта системы для изменения скорости транспортного средства, известные из уровня техники, на основании ближайших изменений уклона могли достичь лишь небольшого улучшения эффективности.
Раскрытие изобретения
В изобретении предложена система управления скоростью, которая использует информацию, полученную от водителя (например, пункт назначения и выбранный маршрут), вместе с другой доступной информацией от бортовых и внешних баз данных (например, географических и дорожных данных). С использованием этой информации можно получить электронный горизонт или предварительный просмотр пути, предстоящего автомобилю, и оптимальный профиль скорости для снижения энергопотребления на всем маршруте. Для получения необходимой информации могут использоваться внешние источники, например, V2V (от автомобиля к автомобилю), интеллектуальные транспортные системы (ITS) и общедоступные сайты (например, для получения данных о дорожной обстановке в реальном времени). В связи с высокой вычислительной нагрузкой для применения полученных данных к моделям прогнозирования энергопотребления транспортного средства используют внешние вычислительные ресурсы. Сочетание всех доступных источников информации с полученными от водителя данными о пункте назначения и желаемом времени нахождения в пути позволяет сформировать рекомендуемый профиль скорости транспортного средства, что позволяет оптимизировать эффективность использования топлива между текущим положением и пунктом назначения. Выбор маршрута может быть основан на предполагаемом расходе топлива для различных возможных маршрутов.
Настоящее изобретение предполагает выполнение расчета оптимального профиля скорости транспортного средства с использованием динамического программирования, чтобы определить оптимальный профиль скорости на предварительно заданном маршруте, учитывая обусловленную информацию о плотности и скорости движения и различных характеристиках дороги (например, дорожном уклоне) на протяжении пути, причем эту информацию применяют к модели расхода топлива транспортного средства. Поскольку динамическое программирование требует большого объема вычислений, превышающего вычислительную мощность бортового компьютера, изобретение предлагает использование ресурсов, доступных по беспроводной связи (например, через интернет) и скачивание результатов для дальнейшего использования в системе управления скоростью. Использование оптимального профиля скорости увеличивает экономию топлива в большей степени, чем традиционные системы управления скоростью, задающие постоянную скорость.
В одном аспекте изобретения предложена система для оптимизации потребления энергии транспортным средством, которая включает в себя устройство для расчета (калькулятор) маршрута для объединения всех участков пути в один маршрут от исходной точки до пункта назначения. Генератор профилей скорости расположен, по крайней мере частично, за пределами транспортного средства и для расчета оптимального профиля скорости использует модель энергопотребления вместе с данными об уклоне дороги. Профиль скорости определяет целевые скорости для соответствующих участков маршрута для прохождения пути с оптимальным уровнем потребления энергии. Для определения оптимального профиля скорости генератор профилей скорости сравнивает уровни потребления энергии для множества возможных траекторий профилей скорости между максимальной траекторией и минимальной траекторией. Устройство корректировки скорости реагирует на текущее положение транспортного средства и оптимальный профиль скорости, чтобы задать необходимую скорость для текущего положения.
Краткое описание чертежей
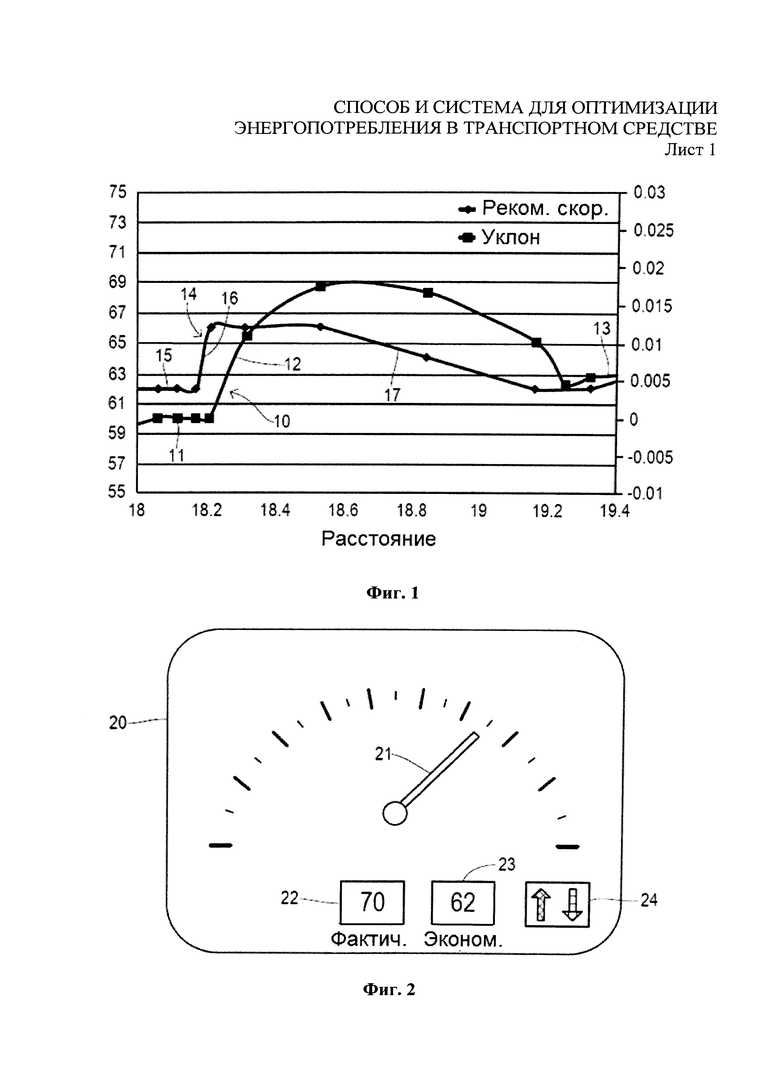
На Фиг.1 представлен график, демонстрирующий зависимость профиля скорости от изменения дорожного уклона, где профиль скорости обеспечивает большую экономию топлива по сравнению с движением с постоянной скоростью.
На Фиг.2 показан человеко-машинный интерфейс для предоставления водителю информации о рекомендуемом профиле скорости.
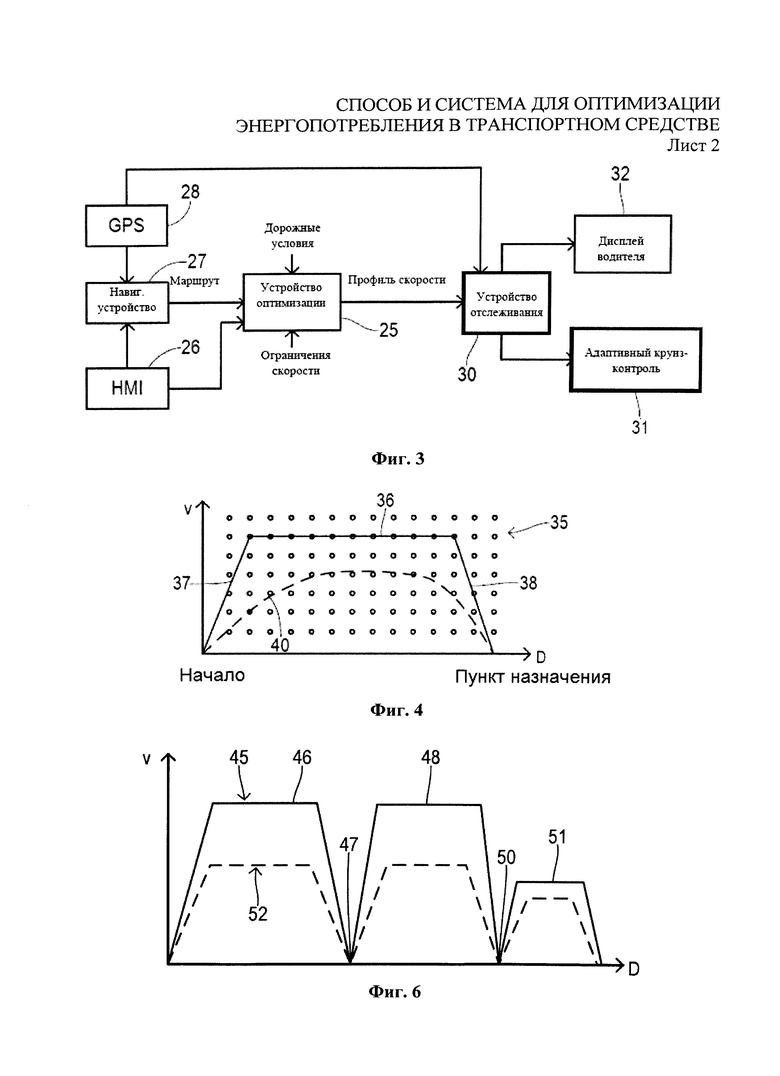
Фиг.3 представляет собой блок-схему, показывающую один из предпочтительных вариантов реализации системы по изобретению.
На Фиг.4 представлена графическая схема области, которая показывает область, содержащую возможные профили скорости.
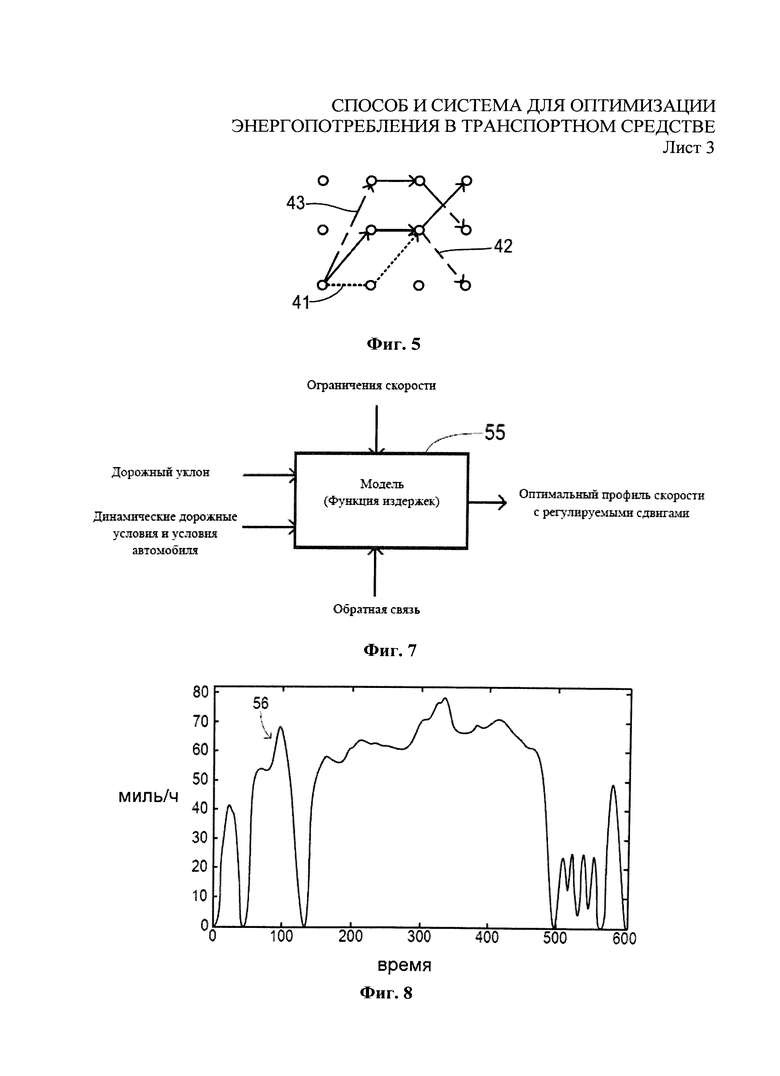
На Фиг.5 представлен участок схемы, показывающий несколько вариантов профилей скорости для их сравнения.
Фиг.6 представляет собой график, показывающий верхние и нижние ограничения профиля скорости, включая предполагаемые остановки на протяжении всего маршрута.
На Фиг.7 изображена модель энергопотребления и функция издержек, рассчитываемые в рамках настоящего изобретения.
Фиг.8 представляет собой график оптимального профиля скорости.
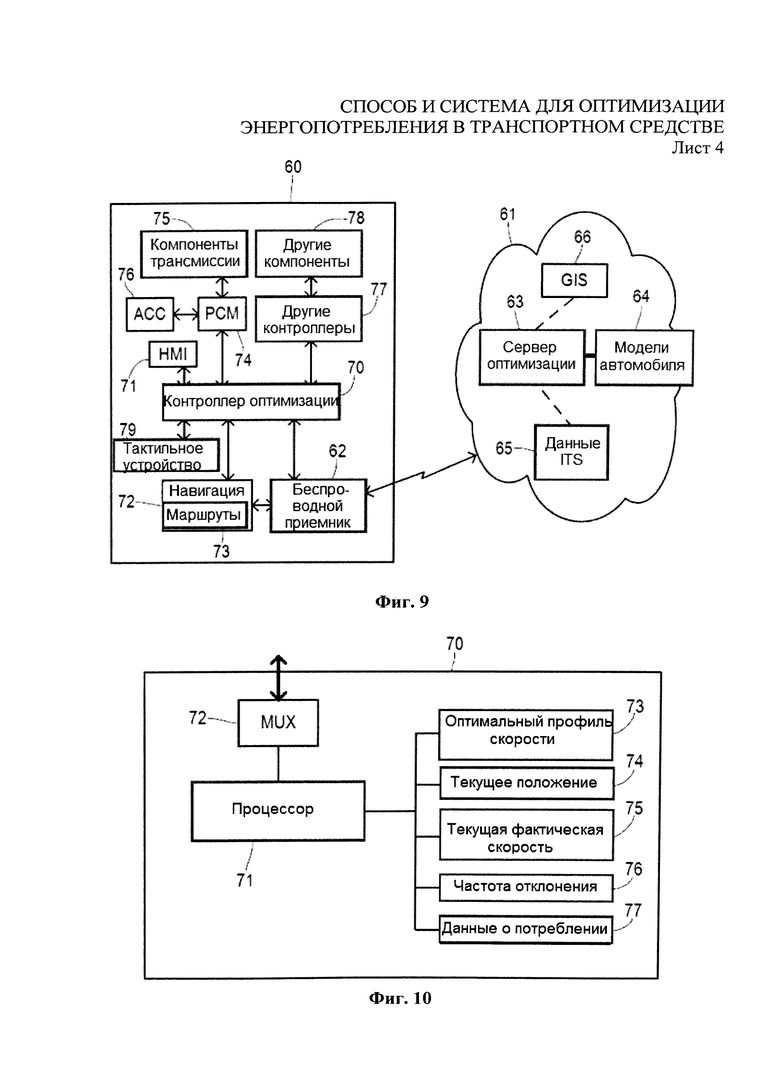
На Фиг.9 представлена блок-схема бортовых и внешних источников для реализации изобретения.
На Фиг.10 показана подробная блок-схема контроллера оптимизации.
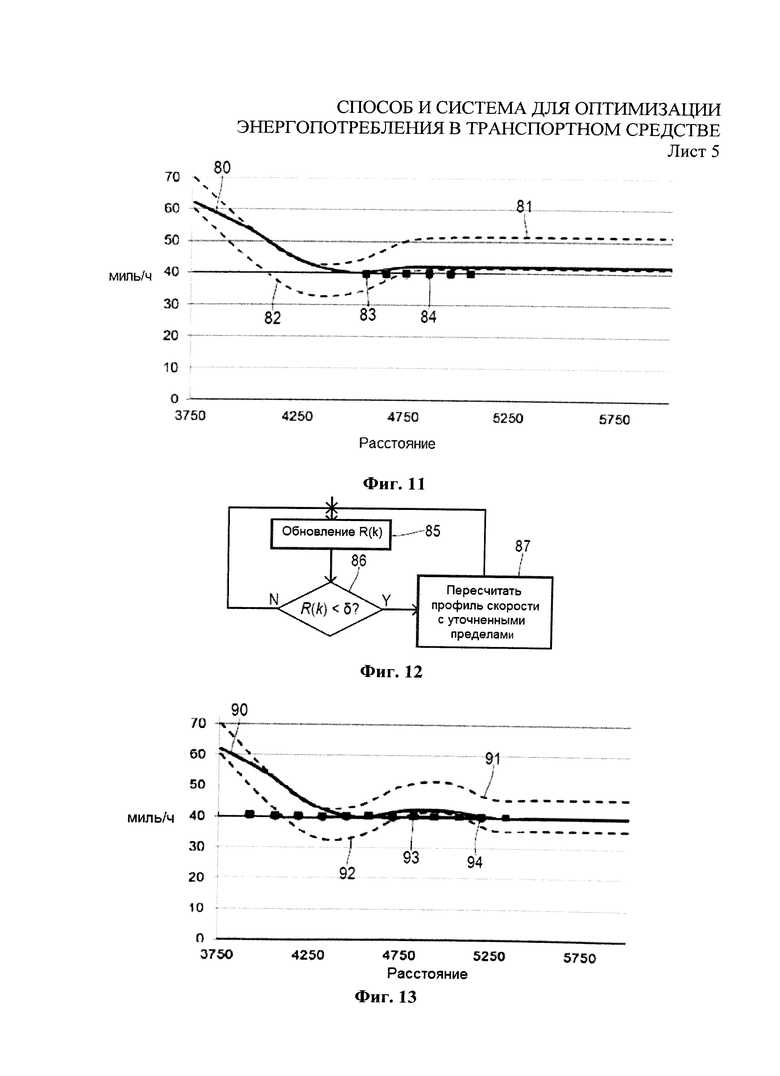
На Фиг.11 представлен график, показывающий оптимальный профиль скорости вместе с фактической скоростью, с которой движется транспортное средство, и область принятия для определения того, следует ли водитель рекомендуемому профилю.
Фиг.12 представляет собой логическую схему способа обновления профиля скорости, если текущий профиль отклонен водителем.
На Фиг.13 представлен график, иллюстрирующий профиль скорости, пересмотренный для увеличения вероятности его использования водителем.
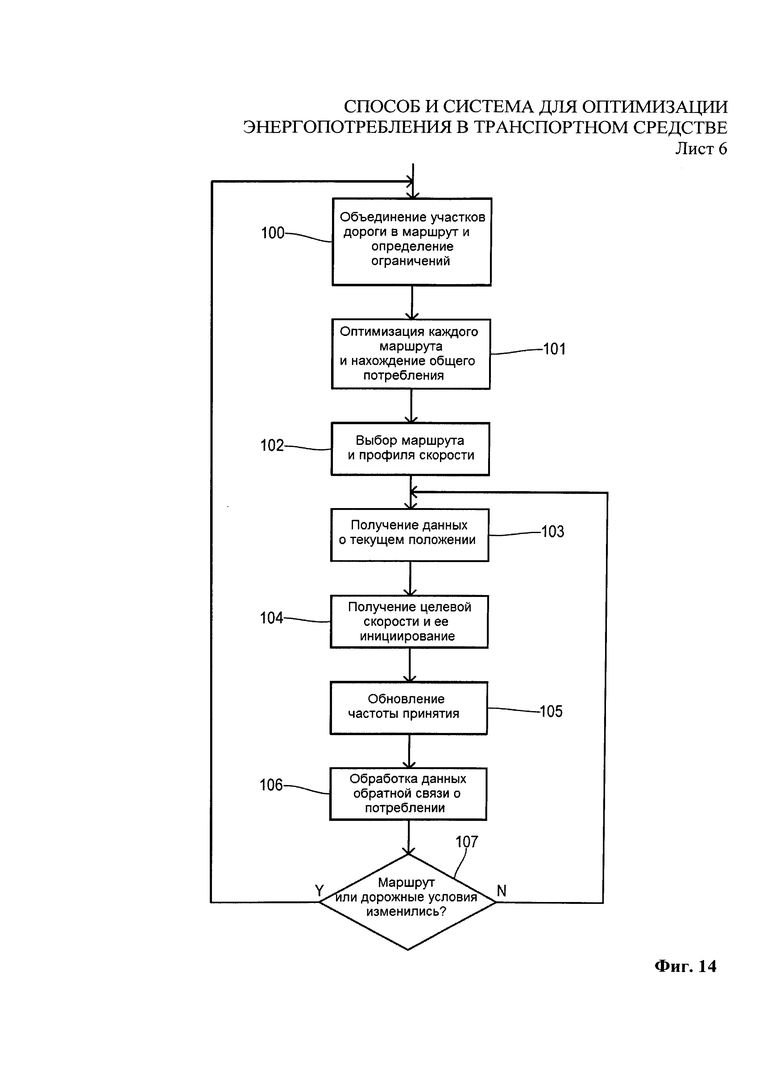
На Фиг.14 приведена логическая схема предпочтительного способа по изобретению.
Осуществление изобретения
Настоящее изобретение является оптимальным средством выдачи рекомендаций, касающихся экономии топлива, которое использует «облачные» ресурсы для определения оптимального профиля скорости, способствующего увеличению реальной экономии топлива. Для определения профиля скорости, повышающего экономию топлива, изобретение предполагает использование в процессе динамического программирования или любых других технологиях оптимизации различных типов доступной информации, в том числе данных маршрута, уклона дороги, дорожной обстановки и информации о транспортном средстве. Точное значение рекомендуемой целевой скорости используется для применения как непосредственно в системах адаптивного круиз-контроля, так и для отображения рекомендуемой скорости водителю через панель управления на лобовом стекле, приборе тактильной навигации или других средствах, воздействующих на органы чувств. Профиль скорости, используемый на протяжении всего маршрута до пункта назначения, учитывает все факторы с целью достижения максимальной экономии топлива.
На Фиг.1 представлена кривая 10, показывающая изменение дорожного уклона, который имеет относительно ровный (0% уклон) участок 11 перед участком 12 с крутым подъемом. Затем увеличивается отрицательный уклон и имеет место плавный спуск, заканчивающийся подъемом на участке 13. Если следовать профилю 14, дорожный уклон может быть пройден транспортным средством с меньшим энергопотреблением (по сравнению со случаем, когда поддерживается постоянная скорость). Сначала транспортное средство поддерживает постоянную скорость на участке 15. Прежде чем достичь участка 12 с подъемом, профиль 14 скорости увеличивается на участке 16 для прохождения дорожного уклона, чтобы выйти на подъем с более высокой скоростью. При прохождении подъема профиль скорости на участке 17 постепенно понижается, таким образом обеспечивая снижение энергопотребления при движения транспортного средства.
Из уровня техники известно определение приближающегося дорожного уклона на основании текущего положения транспортного средства, но в таких системах учитывается только ограниченное расстояние или определенные признаки приближающегося дорожного уклона. Следовательно, с помощью таких систем невозможно найти наилучший возможный способ снижения энергопотребления. Если учитывать дорожный уклон на всем пути к пункту назначения и многие другие параметры, влияющие на расход топлива, как в настоящем изобретении, можно обеспечить значительно большей экономии топлива.
На Фиг.2 показан спидометр 20, который может представлять собой аналоговый манометр 21 и/или цифровой манометр 22 для отображения текущей скорости транспортного средства водителю. В некоторых вариантах реализации изобретения рекомендуемая скорость может быть показана водителю, чтобы он мог регулировать скорость вручную. Дисплей 23, показывающий экономичную скорость, выводит цифровое значение рекомендуемой установленной скорости. В качестве альтернативы или в дополнение к цифровому дисплею может быть использован дисплей 24 регулировки скорости, отображающий значки, соответствующие рекомендациям увеличения или уменьшения скорости. Дисплеи 23 и 24 могут быть включены в приборную панель транспортного средства или, предпочтительнее, могут быть выведены на панель приборов на лобовом стекле (HUD). Человеко-машинный интерфейс (HMI) для вывода заданной скорости или относительного изменения скорости водителю может также включать в себя другие тактильные устройства, например, вибрирующую контактную поверхность (например, тактильную педаль газа или руль) или приборы управления с усилителем, известные из уровня техники.
Основная система для реализации настоящего изобретения представлена на Фиг.3. Устройство 25 оптимизации генерирует профиль скорости на основании входных данных, в том числе дорожных условий, маршрута, ограничений скорости и данных, вводимых пользователем на человеко-машинном интерфейсе 26. Маршрут может быть определен при помощи человеко-машинного интерфейса 26, навигационного устройства 27 и GPS-приемника 28.
Рекомендуемый профиль скорости передается на устройство 30 отслеживания местонахождения, которое определяет текущее положение транспортного средства (например, используя GPS-приемник 28), а также заданную скорость в оптимальном профиле скорости, соответствующую текущему положению. Заданная скорость передается на адаптивную систему 31 круиз-контроля для использования в качестве установленного значения для достижения рекомендуемой заданной скорости, или выводится на дисплей водителя или интерфейс 32, чтобы помочь водителю достичь заданной скорости с помощью регулировки приборов управления.
Устройство 25 оптимизации, расположено, по крайней мере частично, за пределами транспортного средства (т.е. используя «облачные» технологии), как и различные элементы баз данных или данные, предоставляющие ресурсы, используемые устройством 25 оптимизации. Многочисленные доступные вычислительные операции могут быть использованы при вычислении оптимального профиля скорости на основании моделей потребления энергии с использованием данных о дорожном уклоне и другой информации. Одна из предпочтительных процедур показана на Фиг.4, где сетка 35 обозначает варианты различных скоростей транспортного средства в каждой точке всего маршрута от исходной точки до пункта назначения. Пошаговое увеличение скорости и расстояния имеет дискретные этапы, что позволяет получить достаточно высокое разрешение для достижения стабильных результатов и надежной оптимизации. Стандартным разрешением может быть скорость, равная одной миле в час, и расстояние, равное 30 метрам. Область допустимых скоростей может быть определена с помощью сетки 35 на основании участков 36 с максимально допустимой скоростью, участка 37 с максимальным разгоном и участка 38 с максимальным снижением скорости. Профиль скорости на участках 37, 36, и 38 представляет собой максимально быструю поездку, которая определяет границы вокруг конечного пространства, внутри которого может быть найдено оптимальное решение экономии топлива. Таким образом, оптимальный профиль скорости показан в виде кривой 40, который расположен в пределах области возможных траекторий. Для того чтобы определить оптимальный профиль скорости, можно использовать динамическое программирование на основе принципа оптимальности Беллмана, который оценивает каждую из возможных траекторий между пунктом отправления и пунктом назначения, а затем сравнивает результаты для определения оптимального профиля, или на основе любой другой технологии оптимизации. Как показано на Фиг.5, каждая из траекторий 41, 42 и 43 оценивается в результате очень ресурсоемкого процесса, который требует использования внешних вычислительных ресурсов. Способ динамического программирования описан, например, в книге Bertsekas «Dynamic Programming and Optimal Control)), Third Edition (Бертсекас, Динамическое программирование и оптимальное управление, 3-е издание), Athena Scientific, 2005.
В дополнение к ограничениям максимальной скорости и ограничениям, учитывающим меняющиеся дорожные условия, например дождь (т.е. как практическим, так и правовым), использует также минимальное ограничение скорости для обеспечения того, что время, затраченное на поездку, не будет ниже определенного фиксированного значения (также соответствующего законодательным ограничениям). Кроме того, стандартный маршрут может включать в себя вынужденные остановки на регулируемых перекрестках, обусловленные указателями остановки и светофорами. Ограничения скорости могут принять форму, показанную на Фиг.6. Траектория 45 максимальной скорости демонстрирует первый максимум 46, последующую остановку 47 и следующий максимум 48. После другой остановки 50 достигается третий максимум 51, имеющий меньшую величину в соответствии с ограничением скорости, предусмотренным на данном участке дороги. В качестве дальнейшего ограничения оптимального профиля скорости на тех же участках дороги предусмотрена траектория 52 минимальной скорости на основе аналогичных факторов, например, установленной минимальной скорости, желаемого времени нахождения в пути и устройства для регулирования движения.
Траектории 45 и 52 максимальной и минимальной скорости задают границы конечного множества возможных профилей скорости, которые при определении оптимального профиля скорости могут быть проанализированы с помощью динамического программирования или любой другой обусловленной технологии оптимизации. Это достигается путем использования модели 55 с Фиг.7, которая математически отображает функцию издержек для определения уровня энергопотребления в соответствии со скоростью, дорожным уклоном и выбранным набором динамических условий маршрута и транспортного средства. Для ограничения возможных анализируемых траекторий в модели 55 использованы ограничения скорости. Функция издержек и минимизация могут быть реализованы так, как объяснено в книге Wollaeger et al., «Cloud-Computing Based Velocity Profile Generation for Minimum Fuel Consumption: A Dynamic Programming Based Solution)) (Воллегер и др., Получение профиля скорости на основе облачных вычислений для минимизации расхода топлива. Решение, основанное на динамическом программировании), American Control Conference (АСС), 2012, стр.2108-2113, июнь 2012, включенных в настоящее описание в качестве ссылки. Например, конкретная марка/модель транспортного средства с двигателем внутреннего сгорания может быть воспроизведена вычислительной моделью, которая соотносит крутящий момент и скорость с определенным уровнем расхода топлива. Среди переменных, которые желательно учитывать при оценке расхода топлива, можно указать скорость, дорожный уклон, интенсивность движения, погодные условия, условия дорожного покрытия (т.е. гладкость и сцепление), высота дороги над уровнем моря (т.е. давление воздуха), режим переключения передач и параметры преобразователя крутящего момента. Модель расхода топлива может быть рассчитана, в первую очередь, на основе функции зависимости крутящего момента двигателя от частоты вращения двигателя с точками переключения передач при заданных скоростях вращения двигателя, которые, как правило, разрабатывают для калибровки алгоритмов контроля двигателя. Запрашиваемую мощность транспортного средства рассчитывают на основе того, сколько энергии необходимо для движения транспортного средства и преодоления других нагрузок, таких как аэродинамическое сопротивление, сопротивление качению, неэффективность преобразователя крутящего момента, собственные нагрузки и изменения уклона или другие динамические условия дороги и транспортного средства, чаще всего связанные с погодными условиями. После расчета расхода топлива для каждой возможной траектории скорости внутри допустимого пространства выбирается оптимальный профиль скорости. Профиль скорости может также определить время для запланированных переключений передач и/или изменения различных настроек подвески в конкретное время или в конкретном месте на маршруте, для дополнительной оптимизации потребления энергии - при условии, что функция издержек модели использует данные переменные.
На Фиг.8 приведен график, отображающий оптимальный профиль скорости, определенный для конкретного маршрута при конкретных динамических условиях окружающей среды и транспортного средства. Для каждого положения и момента времени на всем маршруте график 56 определяет заданную скорость для прохождения пути с оптимальным уровнем потребления энергии.
Один из предпочтительных вариантов разделения системы согласно настоящему изобретению между транспортным средством 60 и внешним облаком 61 показан на Фиг.9. Транспортное средство 60 и облако 61 задают отдельные области, соединенные беспроводным приемопередатчиком 62 (например, с помощью сотовой связи, V2I и т.д.). Генератор профилей скорости или устройство оптимизации по изобретению полностью или по крайней мере частично встроен в сервер 63 оптимизации, расположенный в облаке 61. Модель, включающая в себя соответствующую функцию издержек для транспортного средства 60, хранится в базе данных 64 моделей транспортного средства, соединенной с или расположенной на сервере 63 оптимизации. Переменные, которые будут вводиться в соответствующую вычислительную модель сервером 63 оптимизации, могут быть взяты из многих источников, включая транспортное средство 60, источник 65 данных интеллектуальной транспортной системы (ITS) и географическую информационную систему (GIS) 66.
Группа ресурсов, расположенная в транспортном средстве 60, передает на сервер 63 динамическую информацию оптимизации, включая исходный пункт маршрута (т.е. текущее положение), пункт назначения, промежуточные точки на маршруте, и динамические данные транспортного средства, включая настройки компонентов подвески, компонентов трансмиссии и других систем транспортного средства, способные повлиять на модель расхода топлива. Контроллер 70 оптимизации выполнен с возможностью взаимодействовать с сервером 63 оптимизации с помощью беспроводного приемопередатчика 62. Контроллер 70 оптимизации соединен с HMI 71 и навигационной системой 72, позволяя водителю определить необходимый пункт назначения. Навигационная система 72 работает как устройство расчета маршрута для оценки множества возможных маршрутов и выбора оптимального маршрута на основании критерия, указанного водителем (или предлагая водителю несколько возможных маршрутов на выбор). Одним из критериев, который может быть использован для выбора оптимального маршрута, является общее потребление энергии для различных маршрутов, при этом уровень расхода определяется в соответствии с информацией, приведенной в настоящем документе.
Если водитель не указывает маршрут, он может быть автоматически проложен навигационной системой 72 путем сравнения текущего пути, пройденного транспортным средством, с привычными маршрутами, ранее сохраненными в базе данных 73 маршрутов (которая может храниться в транспортном средстве или в облаке). Подобные маршруты являются уникальными для транспортного средства 60 и основаны на предыдущих действиях водителя. Используя маршрут и другие данные, передаваемые от контроллера 70 оптимизации и беспроводного приемопередатчика 62 к серверу 63 оптимизации, рассчитывается оптимальный профиль скорости, который затем передается для реализации обратно на контроллер оптимизации. Поскольку транспортное средство 60 двигается по установленному маршруту, контроллер 70 оптимизации определяет текущее положение транспортного средства 60, используя соединение с навигационной системой 72 (которая может включать в себя GPS-приемник и/или систему счисления пути) для определения заданной скорости, соответствующей текущему положению. Соответствующая заданная скорость подается или на блок 74 управления трансмиссией (PCM), содержащий систему регулирования скорости, или на HMI 71 для отображения водителю задаваемой скорости.
PCM 74 соединен с элементом 75 трансмиссии, таким как дроссель, для такой регулировки работы трансмиссии, которая позволит обеспечить заданную скорость, если это возможно. PCM 74 также может быть соединен с адаптивной системой 76 круиз-контроля для мониторинга движущихся рядом транспортных средств, как известно специалистам в данной области техники.
Контроллер 70 оптимизации дополнительно взаимодействует с другими контроллерами 77 системы транспортного средства, например, контроллерами коробки передач или подвески, контролирующими соответствующие компоненты 78. Например, оптимальный профиль скорости может включать в себя точки переключения коробки передач или настройки подвески, инициируемые с помощью контроллера 77.
В дополнение к визуальному или другому отображению для водителя заданной скорости с помощью HMI 71, с контроллером 70 оптимизации может быть соединено тактильное устройство 79 обратной связи (например, рулевое колесо или вибрационная система педали), которые позволяют сообщить водителю о необходимости обновления скорости (т.е. увеличения или снижения) для достижения заданной скорости.
Контроллер 70 оптимизации более подробно изображен на Фиг.10. Процессор 71 может быть соединен с мультиплексной шиной через узловую точку 72, известную из уровня техники. Процессор 71 оперирует различными сохраненными величинами, например, оптимальным профилем 73 скорости, текущим контролируемым положением 74 транспортного средства, текущей скоростью 75, коэффициентом 76 отклонения и историей 77 энергопотребления. Оптимальный профиль 73 скорости рассчитывается, как описано выше. Процессор 71 использует текущее положение 74 транспортного средства для получения соответствующей заданной скорости из профиля 73 для связи с другими устройствами через узел 72. Когда генерируется указание для водителя в соответствии с изменением относительной скорости, необходимым для движения транспортного средства на заданной скорости, процессор 71 использует текущую скорость 75 транспортного средства при сравнении с заданной скоростью с целью генерации надлежащего сообщения для водителя.
В вариантах изобретения, где не используется прямой контроль скорости транспортного средства, заданная скорость указывается водителю в качестве рекомендации для регулировки оптимального профиля скорости, как описано ниже, используя коэффициент 76 отклонения. Водитель может не следовать рекомендуемой заданной скорости по многим причинам, в том числе при наличии условий, связанных с интенсивностью движения и безопасностью, которые не позволяют двигаться с заданной скоростью, или просто потому, что водителя не устраивает рекомендуемая скорость. Разные водители по-разному воспринимают рекомендации оптимальной скорости. Также возможно возникновение непредвиденных дорожных условий, включая дождь или гололед, которые заставят водителя снизить скорость до уровня ниже рекомендуемого значения. Кроме того, если водитель постоянно отклоняется от заданной скорости, ранее рассчитанный оптимальный профиль скорости постепенно теряет свою значимость. Более того, желательно регулировать профиль скорости в соответствии с условиями или стилем вождения для регулировки скорости движения и повышения экономии энергии. Таким образом, настоящее изобретение включает в себя вариант, в котором система постоянно оценивает, следует ли водитель рекомендуемой скорости, и регулирует ограничения скорости в соответствии с адаптивным алгоритмом, который изучает восприятие водителем рекомендуемой скорости и наблюдает за его поведением относительно следования рекомендациям.
Принятие или отклонение рекомендаций заданной скорости определяется путем отслеживания частоты их выдачи. Принятие или отклонение являются дополняющими событиями, таким образом можно вычислить частоту принятия и отклонения рекомендаций. Рекурсивный процесс расчета, определяющий взвешенную частоту принятия (наделяя большим весом более поздние наблюдения), может быть выполнен с помощью применения фильтра нижних частот, использующего экспоненциальное сглаживание следующим образом:
R(k)=(1-α)R(k-1)+α, если νmin<ν(k)<νmax,
R(k)=(1-α)R(k-1), если ν(k)<νmin или ν(k)>νmax
где α - постоянный коэффициент забывания, 0<α≤1, а νmin и νmax определяют зону принятия вокруг заданной скорости. Коэффициент забывания α контролирует скорость обновления среднего взвешенного значения R случаев принятия рекомендаций системы.
На Фиг.11 показан рекомендуемый оптимальный профиль 80 скорости, который рассчитывается между максимальной траекторией 81 и минимальной траекторией 82 для определенного маршрута. Несколько квадратов, представляющих собой точки замера фактической скорости, включают в себя скорость 83 транспортного средства, достигаемую в ситуациях, когда водитель следует рекомендациям заданной скорости. После этого скорость 84 транспортного средства остается на том же уровне (например, 40 миль/ч), хотя рекомендуемая заданная скорость выше. Помимо отклонения от рекомендуемой заданной скорости, расположенной в зоне приема (не показано), скорость на этапе 84 также ниже ранее допустимой минимальной траектории 82 скорости. Если отклонение от рекомендуемой скорости длится в течение продолжительного периода времени, необходимо отрегулировать профиль для компенсации.
На Фиг.12 показан способ непрерывного мониторинга частоты принятия рекомендуемой скорости во время движения по маршруту. На этапе 85 частота принятия R постоянно обновляется (например, используя формулу, описанную выше). На этапе 86 частоту принятия сравнивают с пороговым значением δ. Если частота принятия не меньше порогового значения δ, тогда на этапе 85 происходит возврат для обновления в соответствии с будущими точками данных. Если частота принятия ниже δ, на этапе 87 профиль скорости пересчитывается с учетом регулируемых ограничений скорости. Новые ограничения скорости (максимальная и минимальная траектории) могут быть выбраны на основании установленных ограничений скорости и ранее используемой скорости транспортного средства на текущем маршруте.
Результат регулировки профиля скорости во время движения по маршруту приведен на Фиг.13. Показан оптимальный профиль 90 скорости между максимальной траекторией 91 и минимальной траекторией 92. Транспортное средство продолжает поддерживать скорость 40 миль/ч при каждом замере. После измерения 93 скорости транспортного средства частота принятия падает ниже порогового уровня, таким образом инициируя процесс перерасчета оптимального профиля скорости, что приводит к сдвигу максимальной и минимальной траекторий 91 и 92 после измерения 93 скорости (по сравнению с Фиг.11). На основании пересчитанного профиля скорости с момента измерения 94 скорости достигаются заданные значения, которые более соответствуют рекомендуемым. С учетом новых ограничений, в соответствии с пересмотренными заданными значениями в новых условиях может быть достигнута оптимальная топливная эффективность.
Другой вариант реализации способа по изобретению показан на Фиг.14. После того как водитель укажет пункт назначения и/или несколько точек, должен быть построен маршрут. Исходной точкой маршрута может служить текущее положение, автоматически определяемое GPS-приемником или указанное водителем. На основании таких указанных водителем критериев, как наименьшее время или наименьшее расстояние, оцениваются различные возможные маршруты, и выбирается маршрут, в большей степени отвечающий критериям водителя. В этом варианте одним из критериев выбора маршрута может служить общее потребление энергии для прохождения маршрута. На этапе 100 участки дороги из базы данных карт объединяются в различные возможные маршруты и определяются ограничения скорости для каждого маршрута. На этапе 101 оптимизируется профиль скорости для каждого маршрута с целью определения общего потребления энергии. На этапе 102 водитель выбирает наиболее подходящий маршрут на основании всех критериев. Выбранный профиль скорости, соответствующий выбранному маршруту, загружается в транспортное средство для использования в периодическом обновлении индикатора рекомендуемой скорости на протяжении маршрута. После начала движения бортовое устройство оптимизации на этапе 103 получает данные о текущем положении транспортного средства на маршруте. На этапе 104 оно вызывает значение заданной скорости и инициирует эту скорость, передавая на устройство корректировки скорости. Устройство корректировки скорости может представлять собой систему круиз-контроля, которая принимает заданную скорость в качестве установленной, или HMI, который выводит заданную скорость, или направление, и/или величину изменения скорости, необходимую для достижения заданной скорости.
На этапе 105 контроллер оптимизации обновляет частоту принятия. Кроме того, на протяжении всего маршрута контроллер транспортного средства обрабатывает информацию о текущем расходе энергии (например, используемом топливе) и сохраняет ее в лог-файле. Данные о расходе могут периодически передаваться к внешней модели транспортного средства и серверу оптимизации с целью сравнения текущего потребления энергии с расчетным уровнем потребления энергии в соответствии с используемой моделью. Разница между текущим и расчетным уровнем потребления энергии может быть использована для поэтапного улучшения функции издержек модели.
На этапе 107 выполняется проверка соблюдения маршрута или изменения дорожных условий, например, интенсивности движения или неблагоприятных погодных условиях, способных повлиять на действительность оптимального профиля скорости. Если нет, происходит возврат на этап 103 для продолжения обновления заданной скорости в профиле скорости. Если условия изменились, происходит возврат к внешним вычислительным ресурсам для расчета нового оптимального профиля скорости на основании изменившихся условий. Хотя показан возврат к этапу 100, при перерасчете могут быть выполнены только небольшие корректировки существующего маршрута или других вводимых переменных в функции издержек модели без перерасчета всего маршрута. В любом случае профиль скорости может периодически обновляться на протяжении всего маршрута в результате изменений интенсивности движения, несоблюдения заданной скорости водителем или других факторов оптимизации общей экономии энергии во избежание чрезмерной загрузки линий связи и вычислительных нагрузок.
Настоящее изобретение также предполагает альтернативный вариант воплощения, который не требует постоянного соединения транспортного средства с сетью во время поездки, а только в определенном месте, дома или на рабочем месте. В этом варианте часто повторяемые маршруты сохраняются в историю GPS-местоположений, с указанием соответствующего времени суток во время поездки, и загружаются в облако, когда транспортное средство имеет доступ в сеть. Облачная составляющая системы использует данную информацию вместе с базой данных карт для определения часто повторяемых маршрутов и составления базы данных общих маршрутов с указанием соответствующего времени суток. Затем она рассчитывает оптимальный профиль скорости для каждого маршрута и времени суток, используя географические данные и известные из практики данные, относящиеся к динамическим условиям вождения на протяжении маршрута (например, среднее значение дорожного потока, погоду и т.д.). Вычисления могут быть выполнены для отдельных оптимальных профилей скорости с различными значениями параметров, меняющихся со временем, например, погодных условий или интенсивности движения. Когда транспортное средство имеет доступ в сеть, оптимальные профили скорости загружаются из облака и сохраняются в системе транспортного средства. Во время поездки устройство оптимизации проверяет местоположение транспортного средства для определения, находится ли оно на одном из часто повторяемых маршрутов. После обнаружения сохраненного маршрута транспортное средство загружает соответствующий оптимальный профиль скорости и предлагает водителю оптимальную скорость. Если обнаруженный маршрут имеет более одного профиля скорости с учетом меняющихся условий, определяются текущие условия и выбирает соответствующий профиль.
В изобретении использованы преимущества сетевых сервисно-ориентированных вычислительных платформ, которые позволяют использовать большие базы данных, алгоритмы контролируемого обучения, модели силового агрегата транспортного средства, оптимизацию большой размерности и многие другие значимые алгоритмы, для которых в настоящее время необходимы стационарные вычислительные платформы. Характеристики компьютеров современных транспортных средств ограничены относительно низкой мощностью, небольшим объемом обрабатываемых данных и отсутствием доступа к данным, созданным с момента производства транспортного средства. Ограниченное использование ресурсов снижает масштабируемость для большого количества транспортных средств. Достижения в области мобильной связи между транспортным средством и вычислительной облачной инфраструктурой позволяют использовать новые неограниченные классы электронных функций.
Беспроводное соединение, доступное для транспортного средства, часто характеризуется регулируемой полосой пропускания, переменным временем ожидания и нерегулярным соединением. Бортовой компьютер или ECU характеризуется высокой надежностью, продолжительным сроком службы, устойчивым откликом в реальном времени, низким временем обработки и небольшим объемом памяти (в частности, энергонезависимой памяти). ECU представляет собой мобильное устройство, работающее на протяжении всего срока службы транспортного средства и являющееся частью приобретенного транспортного средства. Данные, созданные в ECU, как правило, представляют собой события, произошедшие относительно недавно. Облачные компьютеры характеризуются высокой надежностью, высокой вычислительной мощностью, большим объемом памяти и (с точки зрения транспортного средства) отсутствием отклика в режиме реального времени. Они представляют собой стационарные управляемые системы, которые часто заменяются и работают на условиях аренды, самостоятельно или на платной основе. Данные, созданные в облаке, как правило, имеют прогнозируемую природу, которая сообщает, что можно ожидать в будущем, а не то, что произошло в прошлом.
Настоящее изобретение предлагает определять оптимальную скорость для поездок, оптимальных по расходу топлива, на основании текущих и предшествующих условий транспортного средства, положения транспортного средства, грузоподъемности и времени суток, информации о дорожной сети, информации о трафике, данных о рельефе, природных условий и доступности, пропускной способности и времени ожидания соединения между транспортным средством и облаком. Кроме того, предлагаемая система может обуславливать настройки трансмиссии для предполагаемых условий поездки, если есть такая возможность. Интерфейсы водителя, например, система содействия водителю или тактильная педаль управления, обеспечивают механизмы предоставления водителю данных о скорости. Они способны предоставить информацию, не заставляя водителя отвлекаться от дороги и побудить водителя снизить расход топлива. Данный вариант может быть реализован в масштабах автомобильного парка страны.
Оптимальная калибровка трансмиссии и оптимальная скорость движения в значительной степени зависят от конкретных дорожных условий, в которых эксплуатируется транспортное средство. Данные условия включают в себя тип дороги, уклон, контроль движения, интенсивность движения, погоду и характеристики вождения. Так оптимальная калибровка и скорость движения в Сан-Антонио, Техасе и Денвере, Колорадо, может значительно отличаться, поскольку Сан-Антонио находится на высоте 650 футов, а Денвер находится на высоте 5280 футов, и у них абсолютно разный климат. При нарушении калибровки современных транспортных средств работа трансмиссии считается приемлемой при соблюдении целого ряда условий, использующих небольшой объем памяти, низкую мощность и эффективность работы компьютеров современных транспортных средств в режиме реального времени. В настоящем изобретении, оптимальная скорость движения для транспортного средства в каждой точке маршрута может быть рассчитана или взята из облачной базы данных вместе с оптимальной картой калибровки для транспортного средства. Оптимальный профиль скорости движения и карта калибровки трансмиссии загружаются в автомобиль при наличии соединения с сетью, а затем используются бортовыми компьютерами. Поскольку бортовые компьютеры имеют достаточно небольшие габариты и могут сохранять лишь несколько маршрутов одновременно, конкретные маршруты выбираются на основе сохраненной информации о маршруте водителя и/или на основании данных об исходной точке - пункте назначения, предоставляемой водителем. Например, положение транспортного средства и скорость определяются при помощи GPS-системы, используемой для определения того, по какому маршруту двигается транспортное средство и в какой точке маршрута транспортное средство находится. Это может быть достигнуто путем использования изображения маршрута в качестве параметризированного графика, проходящего через дорожную систему. Учитывая положение GPS-системы можно определить значение параметра, соответствующего данной точке графика. Данный параметр обозначает соответствующую скорость и карты калибровки, которые предоставляются облачными приложениями для определенного маршрута. Облачное приложение позволяет собирать данные с бортовых компьютеров, синхронизированные с GPS-положением. Среди этих данных могут быть скорость транспортного средства, расход топлива, дорожный уклон, стиль вождения и различные дорожные условия, которые используются для расчета будущей скорости транспортного средства и карт калибровки трансмиссии. Кроме того, облачные приложения собирают данные от облачных источников информации, включая информацию от синоптиков, провайдеров карт и провайдеров данных об интенсивности движения для расчета скорости транспортного средства и калибровки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СОВЕТЧИК ДЛЯ ВОДИТЕЛЕЙ | 2024 |
|
RU2831868C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ САМОСВАЛА С ПОМОЩЬЮ ЦИФРОВОГО СОВЕТЧИКА ВОДИТЕЛЮ | 2021 |
|
RU2774512C1 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ ДОРОЖНЫХ ХАРАКТЕРИСТИК В РЕГИОНЕ, В КОТОРОМ ДВИЖЕТСЯ ТРАНСПОРТНОЕ СРЕДСТВО, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560825C1 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| СПОСОБ ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ НА ВЫХОДЕ КОМПРЕССОРА | 2017 |
|
RU2706169C2 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| ОПРЕДЕЛЕНИЕ ЭКОНОМНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2501088C2 |
Изобретение относится к системам оптимизации энергопотребления. Система оптимизации энергопотребления транспортного средства включает в себя устройство расчета маршрута и генератор профилей скорости. Устройство расчета маршрута объединяет участки пути в один маршрут от исходной точки до пункта назначения. Генератор профилей скорости, расположенный частично за пределами транспортного средства, использует модель потребления энергии транспортным средством вместе с данными о дорожном уклоне, соответствующими указанному маршруту, для вычисления оптимального профиля скорости. Генератор выполнен с возможностью определять значения скорости, при которых прохождение соответствующих участков маршрута будет происходить с оптимальным уровнем потребления энергии. Для определения оптимального профиля скорости генератор профилей скорости выполнен с возможностью сравнивать потребление энергии для множества возможных траекторий профилей скорости между максимальной и минимальной траекториями. Также система содержит устройство для корректировки скорости на основании текущего положения транспортного средства и оптимального профиля скорости. Достигается повышение эффективности энергопотребления. 3 н. и 36 з.п. ф-лы, 14 ил.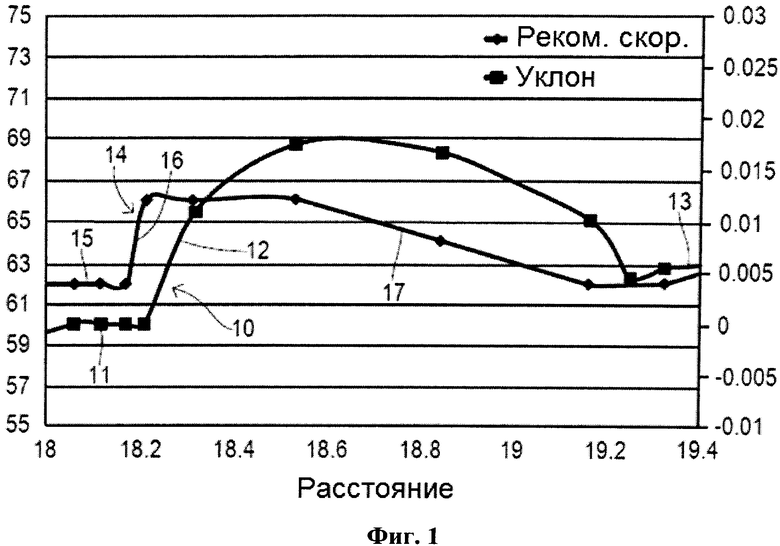
1. Система для оптимизации потребления энергии транспортного средства, которая включает в себя:
устройство расчета маршрута для сборки участков дороги в маршрут от первого положения до пункта назначения;
генератор профилей скорости, расположенный, по меньшей мере частично, за пределами транспортного средства и использующий модель потребления энергии транспортного средства вместе с данными о дорожном уклоне, соответствующими упомянутому маршруту, для вычисления оптимального профиля скорости, который задает целевые значения скорости для соответствующих местоположений на маршруте для прохождения маршрута с оптимизированным потреблением энергии, причем для идентификации оптимального профиля скорости генератор профилей скорости сравнивает потребление энергии для множества возможных траекторий профилей скорости между максимальной траекторией и минимальной траекторией; и
устройство для корректировки скорости в ответ на текущее положение транспортного средства и оптимальный профиль скорости для инициирования целевой скорости, заданной для текущего положения.
2. Система по п. 1, в которой генератор профилей скорости периодически обновляет оптимальный профиль скорости при движении по маршруту.
3. Система по п. 1, в которой устройство для корректировки скорости включает в себя адаптивную систему круиз-контроля, которая использует целевую скорость для текущего положения в качестве уставки скорости.
4. Система по п. 1, в которой устройство корректировки скорости включает в себя устройство человеко-машинного интерфейса для указания водителю целевой скорости или необходимости изменения скорости для достижения целевой скорости.
5. Система по п. 4, в которой устройство человеко-машинного интерфейса представляет собой графический дисплей, показывающий цифровое значение целевой скорости.
6. Система по п. 4, в которой устройство человеко-машинного интерфейса представляет собой графический дисплей, имеющий визуальные характеристики для указания, требуется ли увеличение скорости или снижение скорости для достижения целевой скорости.
7. Система по п. 1, в которой генератор профилей скорости определяет максимальную траекторию в ответ на разрешенное скоростное ограничение, соответствующее участкам дороги.
8. Система по п. 1, в которой генератор профилей скорости определяет минимальную траекторию в ответ на остановки в соответствии с регулированием трафика на участках дороги.
9. Система по п. 1, дополнительно содержащая беспроводной приемопередатчик данных в транспортном средстве для связи с удаленным сервером, при этом удаленный сервер включает в себя по меньшей мере часть генератора профилей скорости.
10. Система по п. 9, дополнительно содержащая устройство контроля потребления энергии, генерирующее данные об использовании энергии на основе оптимального профиля скорости, причем данные об использовании энергии отправляют посредством беспроводного приемопередатчика данных на удаленный сервер так, что генератор профилей скорости уточняет модель потребления энергии.
11. Система по п. 1, в которой устройство расчета маршрута включает в себя устройство ввода для использования водителем для идентификации пункта назначения.
12. Система по п. 1, в которой устройство расчета маршрута включает в себя:
устройство отслеживания местоположения для мониторинга текущего положения транспортного средства, и
устройство распознавания, сохраняющее маршруты, по которым часто проезжает транспортное средство, и сравнивающее текущий путь транспортного средства с сохраненными маршрутами для выбора текущего маршрута.
13. Система по п. 1, в которой устройство расчета маршрута собирает участки дороги в маршрут в ответ на оценку оптимизированного потребления энергии, рассчитанного для множества возможных маршрутов между первым положением и пунктом назначения.
14. Система по п. 1, в которой модель потребления энергии рассчитывает оптимальный профиль скорости дополнительно в ответ на условия маршрута, выбранные из группы: плотность движения, погодные условия, состояние дорожной поверхности, высота над уровнем моря, режим переключения передач и работа преобразователя крутящего момента.
15. Система по п. 1, в которой оптимальный профиль скорости дополнительно задает настройки коробки передач.
16. Система по п. 1, в которой оптимальный профиль скорости дополнительно задает настройки подвески.
17. Система по п. 1, в которой устройство расчета маршрута определяет множество часто проезжаемых маршрутов на основании истории местоположений транспортного средства, времени суток и условий поездки, причем генератор профилей скорости рассчитывает соответствующий оптимальный профиль скорости для часто проезжаемых маршрутов, причем оптимальные профили скорости загружаются в транспортное средство, и при этом устройство корректировки скорости использует один из загруженных оптимальных профилей скорости в ответ на обнаружение движения транспортного средства по одному из часто проезжаемых маршрутов в соответствующее время суток и при соответствующих условиях поездки.
18. Способ оптимизации потребления энергии транспортного средства, содержащий этапы, на которых:
собирают в навигационной системе участки дороги в маршрут от первого положения до пункта назначения;
оценивают модель потребления энергии транспортного средства вместе с данными о дорожном уклоне, соответствующими упомянутому маршруту, для расчета оптимального профиля скорости, который задает целевые значения скорости для соответствующих местоположений на маршруте для прохождения маршрута с оптимизированным потреблением энергии, при этом для идентификации оптимального профиля скорости сравнивают потребление энергии для множества возможных траекторий профилей скорости между максимальной траекторией и минимальной траекторией, причем оценку выполняют вне транспортного средства посредством удаленного сервера и при этом транспортное средство осуществляет связь беспроводным образом с удаленным сервером для приема оптимального профиля скорости;
указывают водителю на устройстве человеко-машинного интерфейса заданную целевую скорость или необходимость изменения скорости для достижения заданной целевой скорости в ответ на текущее положение транспортного средства и оптимальный профиль скорости;
определяют показатель принятия целевой скорости водителем посредством сравнения фактической скорости с зоной принятия вокруг целевой скорости в процессоре; и
если упомянутый определенный показатель принятия ниже порогового значения, то повторно рассчитывают оптимальный профиль скорости с использованием исправленных максимальной и минимальной траекторий, которые выбраны для увеличения показателя принятия.
19. Способ по п. 18, в котором оптимальный профиль скорости периодически обновляют при движении по маршруту.
20. Способ по п. 18, в котором этап инициирования включает в себя отображение цифрового значения целевой скорости.
21. Способ по п. 18, в котором этап инициирования включает в себя отображение визуальных характеристик для указания, требуется ли увеличение скорости или снижение скорости для достижения целевой скорости.
22. Способ по п. 18, в котором последовательно определяют показатель принятия R(k) для каждой последующей целевой скорости k согласно формуле:
R(k)=(1-α)R(k-1)+α, если νmin<ν(k)<νmax,
R(k)=(1-α)R(k-1), если ν(k)<νmin или ν(k)>νmax
где α - постоянный коэффициент забывания, 0<α≤1, ν(k) - фактическая скорость, a νmin и νmax задают зону принятия вокруг целевой скорости.
23. Способ по п. 18, в котором максимальную траекторию определяют в ответ на разрешенное скоростное ограничение, соответствующее участкам дороги.
24. Способ по п. 18, в котором минимальную траекторию определяют в ответ на остановки в соответствии с регулированием трафика на участках дороги.
25. Способ по п. 18, дополнительно содержащий этапы, на которых:
контролируют потребление энергии для генерации данных об использовании энергии транспортным средством, использующим оптимальный профиль скорости;
беспроводным образом отправляют данные об использовании энергии на удаленный сервер; и
уточняют модель потребления энергии в ответ на данные об использовании энергии.
26. Способ по п. 18, дополнительно содержащий этап, на котором водитель вручную выполняет ввод пункта назначения.
27. Способ по п. 18, дополнительно содержащий этапы, на которых:
отслеживают текущее положение транспортного средства; и
сравнивают текущий путь транспортного средства с множеством сохраненных маршрутов, часто проезжаемых транспортным средством, для выбора текущего маршрута.
28. Способ по п. 18, в котором участки дороги, собранные в маршрут, выбирают в ответ на оценку оптимизированного потребления энергии, рассчитанного для множества возможных маршрутов между первым положением и пунктом назначения.
29. Способ по п. 18, в котором модель потребления энергии рассчитывает оптимальный профиль скорости дополнительно в ответ на условия маршрута, выбранные из группы: плотность движения, погодные условия, состояние дорожной поверхности, высота над уровнем моря, режим переключения передач и работа преобразователя крутящего момента.
30. Способ по п. 18, в котором оптимальный профиль скорости дополнительно задает настройки коробки передач.
31. Способ по п. 18, в котором оптимальный профиль скорости дополнительно задает настройки подвески.
32. Способ по п. 18, в котором сбор маршрута включает в себя определение множества часто проезжаемых маршрутов на основании истории местоположений транспортного средства, времени суток и условий поездки, причем для часто проезжаемых маршрутов рассчитывают множество оптимальных профилей скорости и при этом способ дополнительно содержит этап, на котором обнаруживают движение транспортного средства по одному из часто проезжаемых маршрутов в соответствующее время суток и при соответствующих условиях поездки и выбирают соответствующий оптимальный профиль скорости для определения целевой скорости.
33. Система для оптимизации потребления энергии транспортного средства, содержащая:
устройство расчета маршрута для сбора участков дороги в маршрут от первого положения до пункта назначения;
генератор профилей скорости, расположенный, по меньшей мере частично, за пределами транспортного средства и использующий модель потребления энергии транспортного средства вместе с данными о дорожном уклоне, соответствующими упомянутому маршруту, для вычисления оптимального профиля скорости, который задает целевые значения скорости для соответствующих местоположений на маршруте для прохождения маршрута с оптимизированным потреблением энергии, причем для идентификации оптимального профиля скорости генератор профилей скорости сравнивает потребление энергии для множества возможных траекторий профилей скорости между максимальной траекторией и минимальной траекторией;
устройство для корректировки скорости в ответ на текущее положение транспортного средства и оптимальный профиль скорости для инициирования целевой скорости, заданной для текущего положения, причем устройство для корректировки скорости включает в себя устройство человеко-машинного интерфейса для указания водителю целевой скорости или необходимости изменения скорости для достижения целевой скорости; и
устройство контроля для определения показателя принятия целевой скорости водителем;
причем, если упомянутый определенный показатель принятия ниже порогового значения, то генератор профилей скорости повторно рассчитывает оптимальный профиль скорости с использованием исправленных максимальной и минимальной траекторий, которые выбраны для увеличения показателя принятия.
34. Система по п. 33, в которой показатель принятия R(k) последовательно определяют для каждой последующей целевой скорости k в соответствии с формулой:
R(k)=(1-α)R(k-1)+α, если νmin<ν(k)<νmax,
R(k)=(1-α)R(k-1), если ν(k)<νmin или ν(k)>νmax
где α - постоянный коэффициент забывания, 0<α≤1, ν(k) - фактическая скорость, a νmin и νmax определяют зону принятия вокруг целевой скорости.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, ОТОБРАЖАЮЩЕЕ ИНФОРМАЦИЮ О ДВИЖЕНИИ | 2005 |
|
RU2354935C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

