Предлагаемое изобретение относится к области разработки систем управления беспилотными летательными аппаратами и может быть использовано в комплексах управляемого артиллерийского вооружения и других комплексах вооружения, в которых применяется комбинированное наведение снаряда на цель: баллистический полет после выстрела, затем инерциальное наведение с постоянным углом наклона траектории и точное наведение на цель (например, самонаведение) на конечном участке траектории.
Известен способ стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда [152-мм выстрел 3ВОФ64 (3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и полным переменным (уменьшенным переменным) зарядом. Техническое описание и инструкция по эксплуатации. М.: Военное издательство, 1990, с.21-22], включающий измерение одноканальным релейным датчиком угла наклона продольной оси снаряда в опорной системе координат, реализуемой гироскопическим прибором в момент разарретирования, и формирование сигнала управления одноканальным релейным рулевым приводом на время превышения углом наклона величин зон нечувствительности рабочих секторов датчика угла. Токосъемник датчика угла связан с наружной рамкой гироскопического прибора, ротор которого до разарретирования, осуществляемого в определенный момент времени, отсчитываемый от момента старта, ориентирован по продольной оси снаряда, а три рабочих сектора жестко связаны с корпусом снаряда. Величина зоны нечувствительности одного из секторов (основного) определяется требуемым углом наклона оси снаряда, другого (дополнительного), размещенного относительно начального положения токосъемника с противоположной по отношению к основному сектору стороны, разностью требуемого угла планирования и величины амплитуды угла колебаний снаряда по углу атаки, а третьего (вспомогательного), размещенного со стороны дополнительного сектора, равна величине 2-3 амплитуд угла колебаний снаряда по углу атаки. Формирование команд управления на участке планирования осуществляется по сигналам с основного и дополнительного секторов. Сигнал управления формируют для одной из двух пар рулей в соответствии с зависимостями:


где Uү - сигнал на рулевой привод;
Ub1, Ub2 - сигналы датчика угла;
αГИ - угол поворота наружной рамки инерциального гироскопа относительно снаряда в связанной с вращающимся снарядом системе координат, αГИ=Δ×cosγ;
γ - угол крена снаряда, отсчитываемый от вертикальной плоскости;
Δ - модуль угла пеленга, т.е. угла между продольной осью снаряда и осью ротора гироскопа;
b1, b2 - величины зон нечувствительности основного и дополнительного секторов датчика угла соответственно.
Формирование сигнала управления только для одной пары рулей существенно ограничивает дальность стрельбы, т.к. сигнал управления на участке инерциального наведения не может превышать определенного значения. Возможность увеличения сигнала компенсации ограничена необходимостью введения в конструкцию гироскопического прибора дополнительного датчика угла для управления вторым каналом рулевого привода, т.к. он должен быть установлен на внутренней рамке, что приведет к увеличению габаритов гироскопа и снижению точности за счет введения в его конструкцию токопередающего устройства.
Задачей предлагаемого изобретения является увеличение дальности стрельбы артиллерийского управляемого снаряда без изменения конструкции и габаритов снаряда.
В предлагаемом способе стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда, включающем измерение одноканальным релейным датчиком угла, связанным с наружной рамкой гироскопического датчика угла и выполненным в виде трех секторов, основного и дополнительного, расположенных по разные стороны от нулевого положения датчика и третьего вспомогательного, расположенного со стороны дополнительного сектора, угла наклона продольной оси снаряда в системе координат, реализованной гироскопом в момент разарретирования, формирование сигнала управления одним каналом релейного рулевого привода на время превышения углом наклона величин зон нечувствительности секторов датчика, при этом величина зоны нечувствительности основного сектора равна требуемому углу наклона, дополнительного - разности угла наклона и величины амплитуды угла колебаний снаряда по углу атаки, а вспомогательного - величине 2-3 амплитуд угла колебаний снаряда по углу атаки, при превышении углом наклона продольной оси снаряда зон нечувствительности основного или дополнительного секторов формируется сигнал управления рулевым приводом первого канала и одновременно на каждом периоде вращения снаряда по крену анализируется наличие сигнала управления с основного сектора, при его наличии осуществляют операции: Mn=M0+1, Ln=0, а при отсутствии: Ln=L0+1, Mn=0, где Mn, Ln - целочисленные величины с начальными значениями М0=0, L0=0, назначают величину N количества анализируемых периодов вращения и при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления первым каналом рулевого привода, заключающийся в формировании команд по наличию сигнала с дополнительного и отсутствию сигнала с вспомогательного секторов датчика угла и определении величин Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления первым каналом рулевого привода, заключающийся в формировании команд по наличию и отсутствию сигнала с вспомогательного сектора датчика угла, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления, заключающийся в дополнительном формировании команды управления вторым каналом рулевого привода на полупериоде вращения снаряда по крену, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления, заключающийся в дополнительном формировании команды управления вторым каналом рулевого привода на периоде вращения снаряда по крену, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом, при этом команды, подаваемые во второй канал рулевого привода, получают из команд управления первого канала смещением их по времени на величину Т/4, где Т - период вращения снаряда по крену.
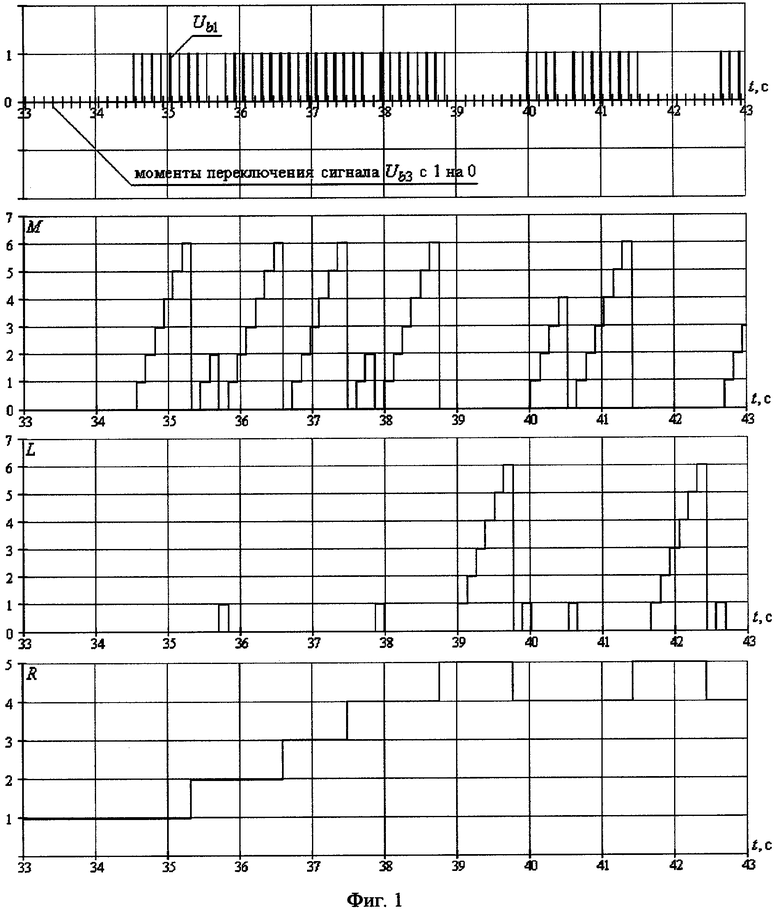
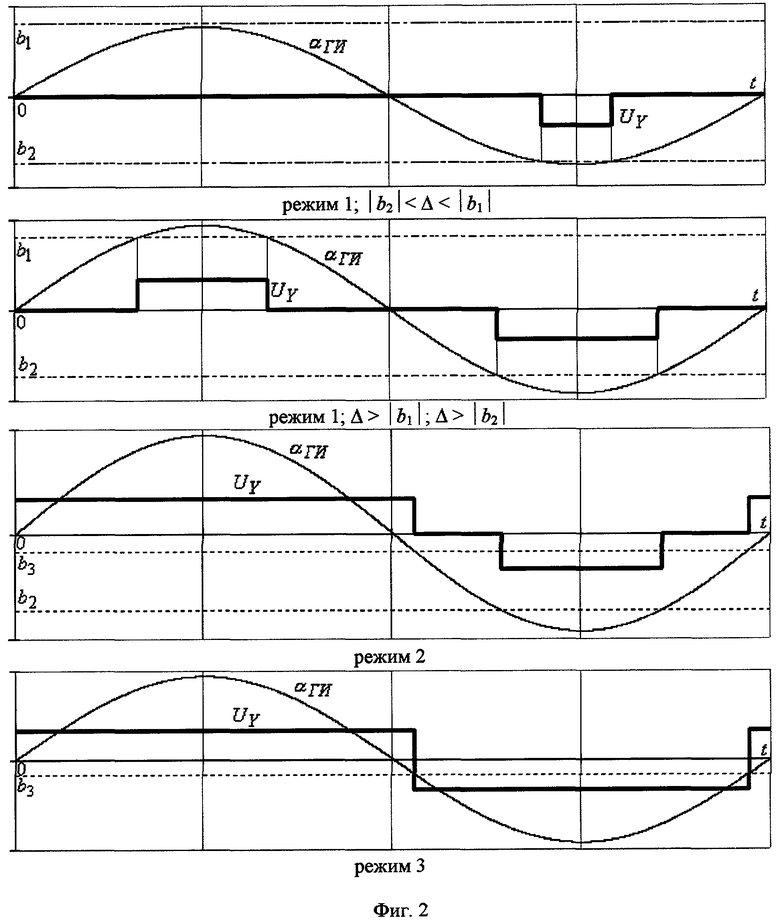
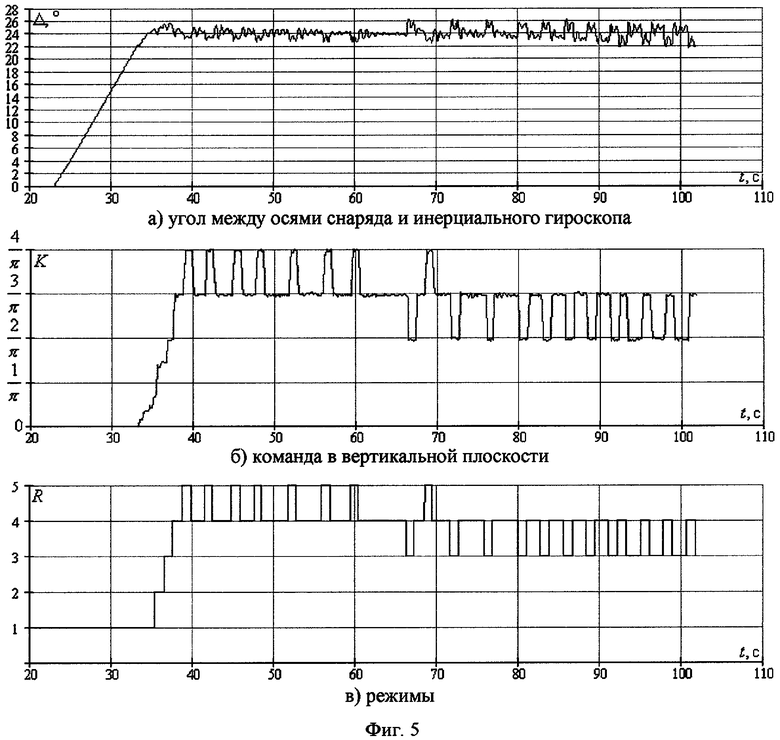
Технический результат достигается посредством изменения закона формирования команды управления первым каналом рулевого привода и введения управления вторым каналом рулевого привода при использовании одноканального датчика угла. Предлагаемое изобретение поясняется графическими материалами, где на фиг.1 приведены примеры подсчета количества импульсов сигнала с основного сектора датчика угла и переключения режимов управления, на фиг.2 - формирование сигналов управления в режимах 1, 2, 3, на фиг.3 - формирование сигналов управления в режимах 4, 5, на фиг.4 - зависимость команды в вертикальной плоскости от угла Δ между осями снаряда и гироскопа при различных режимах управления (R), на фиг.5 - пример реализации процесса управления.
В предлагаемом способе стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда в процессе формирования сигнала управления первым каналом рулевого привода по сигналам с основного и дополнительного секторов (режим 1) на каждом полупериоде вращения, характеризующемся отсутствием сигнала с вспомогательного сектора, т.е. Ub3=0, дополнительно проводится анализ наличия или отсутствия сигнала с основного сектора датчика угла, задающего требуемую величину угла наклона оси снаряда. В случае наличия сигнала осуществляют операции Mn=М0+1, Ln=0, а при отсутствии Ln=L0+1, Mn=0, где Mn, Ln - целочисленные величины с начальными значениями М0=0, L0=0. При достижении величиной Mn заданного значения N, т.е. Mn=N, где N - заданное количество периодов вращения снаряда по крену, осуществляют операцию по присвоению величине Mn значения, равного Mn=0, и включают следующий режим управления первым каналом рулевого привода. Для обеспечения инвариантности измерения угла наклона снаряда от амплитуды собственных колебаний снаряда по углу атаки время анализа его величины выбирается не менее периода собственных колебаний и задается через количество периодов вращения N≥Тсобст./tвращ., где tвращ. - математическое ожидание периода вращения по крену. Включаемый режим управления заключается в формировании команд управления по наличию сигнала с дополнительного и отсутствию сигнала с вспомогательного секторов датчика угла (режим 2) и определении величин Mn, Ln. При выполнении условия Lт=N величине присваивают значение, равное Ln=0, и включают предыдущий режим управления первым каналом рулевого привода по сигналам с основного и дополнительного секторов, а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления первым каналом рулевого привода, заключающийся в формировании команд по наличию и отсутствию сигнала с вспомогательного сектора датчика угла (режим 3) и определении величин Mn, Ln. При выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом (режим 2), а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления, заключающийся в дополнительном к режиму 3 формировании команды управления вторым каналом рулевого привода на полупериоде вращения снаряда по крену (режим 4) и определении величин Mn, Ln. Команды, подаваемые во второй канал рулевого привода, получают из команд управления первого канала смещением их по времени на величину Т/4, где Т - период вращения снаряда по крену, определяемый по сигналу с вспомогательного сектора. При выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом (режим 3), а при выполнении условия Mn=N величине Mn присваивают значение, равное Mn=0, и включают следующий режим управления, заключающийся в дополнительном формировании команды управления вторым каналом рулевого привода на периоде вращения снаряда по крену (режим 5) и определении величин Mn, Ln. При выполнении условия Ln=N величине Ln присваивают значение, равное Ln=0, и включают предыдущий режим управления рулевым приводом (режим 4).
Сигналы управления формируют в соответствии с зависимостями:
режим 5

где

Ub1, Ub2, Ub3 - сигналы с основного, дополнительного и вспомогательного секторов датчика угла соответственно;
 - сигнал, смещенный относительно сигнала по времени на величину 0.25 T;
- сигнал, смещенный относительно сигнала по времени на величину 0.25 T;
Т - период следования сигнала Ub3.
Для пояснения предлагаемого способа рассмотрим процесс стабилизации углового положения продольной оси снаряда. Особенностью способа стабилизации является компенсация ошибки  ош, обусловленной действием на снаряд силы тяжести и равной:
ош, обусловленной действием на снаряд силы тяжести и равной:
где  0 - требуемая величина угла наклона оси снаряда в вертикальной плоскости;
0 - требуемая величина угла наклона оси снаряда в вертикальной плоскости;
уст - установившаяся величина угла наклона оси снаряда в вертикальной плоскости (если влияние силы тяжести не компенсируется);
g - ускорение свободного падения;
V - скорость снаряда;
Kпл - коэффициент передачи планера снаряда, связывающий производную (по времени) угла наклона траектории снаряда с углом отклонения рулей;
Kрп - коэффициент передачи рулевого привода (РП), связывающий угол отклонения рулей с сигналом управления;
Ka - коэффициент передачи аппаратуры управления, связывающий сигнал управления с углом рассогласования между требуемым и фактическим положениями продольной оси снаряда.
Влияние силы тяжести может быть скомпенсировано посредством формирования сигнала компенсации, равного
При изменении скорости снаряда величина потребного коэффициента команды изменяется в широком диапазоне. Возможность увеличения коэффициента передачи аппаратуры без введения в аппаратуру управления корректирующих устройств ограничена, т.к. при увеличении коэффициента передачи разомкнутого контура управления
Kраз=KaKрпKпл
свыше определенного значения, система становится неустойчивой, поэтому коэффициент Ka должен выбираться исходя из требуемых запасов устойчивости системы.
Величина команды в вертикальной плоскости определяется как:
где Т - период вращения снаряда по крену;
t - текущее время;
Y(t)=Uγ(t)×cosγ+UZ(t)×sinγ - управляющий сигнал, преобразованный в вертикальную плоскость не вращающейся по крену системы координат;
γ - угол крена снаряда.
Поскольку на участке инерциального наведения снаряд под действием силы тяжести разворачивается в вертикальной плоскости, существенного отклонения траектории снаряда в горизонтальной плоскости не происходит и можно считать, что
αГИ=Δ×cosγ.
Команда в вертикальной плоскости, обусловленная импульсом сигнала Uγ, равна

где -γ1, γ1 - углы по крену начала и окончания формирования гироскопом сигнала управления.
Величина γ1 определяется из условия
αГИ=Δ×cosγ1=b1;
откуда
 ;
;

Если угол пеленга Δ превышает величины зон нечувствительности основного и дополнительного секторов |b1| и |b2|, то коэффициент команды в режиме 1 будет
При достаточно близкой к нулю величине угла зоны нечувствительности вспомогательного сектора b3 коэффициент команды в режиме 2 будет
в режиме 3 
в режиме 4 
в режиме 5 
Предлагаемый способ стабилизации позволяет увеличить команду с 0,41 единиц до 1,27.
На фиг.1-4 приведены временные диаграммы, иллюстрирующие переход процесса стабилизации из одного режима в другой, на фиг.5 - зависимость команды управления в вертикальной плоскости от угла пеленга Δ при различных режимах стабилизации.
Величину изменения сигнала управления выбирают исходя из допустимого изменения угла , обусловленного скачкообразным изменением сигнала управления. Требуемое значения команды обеспечивается введением пяти режимов формирования команды. За счет периодической «подстройки» сигнала компенсации веса уменьшается ошибка угловой стабилизации снаряда в вертикальной плоскости, обусловленная изменением скорости снаряда и коэффициента передачи планера, при достаточно малом (в том числе нулевом) коэффициенте пропорциональности между углом рассогласования Δ и сигналом управления, что позволяет увеличить максимальную дальность стрельбы при допустимой амплитуде изменения угла .
Предложенный способ позволяет осуществлять инерциальное наведение таким образом, что среднее значение угла Δ приблизительно равно |b1|, т.к. если в течение времени, равного N×tвращ, угол Δ был больше или равен |b1|, то происходит увеличение команды в вертикальной плоскости, если в течение времени N×tвращ угол Δ был меньше |b1|, происходит уменьшение команды в вертикальной плоскости, а если за время N×tвращ угол Δ принимал значения как больше, так и меньше |b1|, команда не изменяется.
Если рассматривать достаточно большие интервалы времени (по сравнению с величиной N×tвращ), на участке инерциального наведения реализуется бесконечно большой коэффициент пропорциональности между отклонением угла Δ от требуемого значения и изменением команды в вертикальной плоскости, т.е. величина команды в вертикальной плоскости в среднем всегда соответствует значению, требуемому для того, чтобы угол Δ был равен заданному значению. Но в каждом из отдельных режимов команда в вертикальной плоскости либо не зависит от угла Δ (в режимах 3, 4, 5), либо отношение изменения команды к изменению угла Δ достаточно мало, чтобы для обеспечения устойчивости системы инерциального наведения не требовалось применения корректирующих устройств. Величину N целесообразно выбирать таким образом, чтобы при минимальном периоде tвращ вращения снаряда по крену время N×tвращ было достаточным для завершения переходного процесса по углу тангажа, который возникает после переключения режимов, в этом случае устойчивость системы в каждом из режимов инерциального наведения гарантирует устойчивость процесса инерциального наведения в целом. С другой стороны, необходимо, чтобы при максимальном периоде tвращ вращения снаряда по крену отклонение снаряда от заданной траектории за время N×tвращ было достаточно малым, чтобы на конечном участке траектории точное попадание снаряда в цель можно было обеспечить посредством точного наведения, в частности самонаведения. Введение предлагаемого способа стабилизации углового положения продольной оси снаряда позволяет увеличить максимальную дальность стрельбы на 25…30%.
Реализация предлагаемого способа стабилизации осуществляется путем использования микропроцессорной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ СНАРЯДОМ | 2012 |
|
RU2502937C1 |
| СПОСОБ ИНЕРЦИАЛЬНОГО НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ СНАРЯДА | 2015 |
|
RU2584403C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2003 |
|
RU2239788C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ЭЛЕКТРОННЫЙ БЛОК ДВУХКАНАЛЬНОЙ ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 2011 |
|
RU2478909C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА САМОНАВОДЯЩИМСЯ СНАРЯДОМ | 2011 |
|
RU2482426C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |


Изобретение относится к области вооружения и может быть использовано в комплексах управляемого артиллерийского вооружения. Задачей предлагаемого изобретения является увеличение дальности стрельбы артиллерийского управляемого снаряда без изменения конструкции и габаритов снаряда. Технический результат - увеличение дальности стрельбы. Способ включает измерение одноканальным релейным датчиком угла, связанным с наружной рамкой гироскопического датчика угла и выполненным в виде трех секторов, основного и дополнительного, расположенных по разные стороны от нулевого положения датчика и третьего вспомогательного, расположенного со стороны дополнительного сектора, угла наклона продольной оси снаряда. Осуществляют формирование сигнала управления одним каналом релейного рулевого привода на время превышения углом наклона величин зон нечувствительности секторов датчика. При этом величина зоны нечувствительности основного сектора равна требуемому углу наклона, дополнительного - разности угла наклона и величины амплитуды угла колебаний снаряда по углу атаки, а вспомогательного - величине 2-3 амплитуд угла колебаний снаряда по углу атаки. При превышении углом наклона продольной оси снаряда зон нечувствительности основного или дополнительного секторов формируется сигнал управления рулевым приводом первого канала. При выполнении определенных условий включают режимы управления первым и вторым каналами рулевого привода. 5 ил.
Способ стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда, включающий измерение одноканальным релейным датчиком угла, связанным с наружной рамкой гироскопического датчика угла и выполненным в виде трех секторов, основного и дополнительного, расположенных по разные стороны от нулевого положения датчика и третьего вспомогательного, расположенного со стороны дополнительного сектора, угла наклона продольной оси снаряда в системе координат, реализованной гироскопом в момент разарретирования, формирование сигнала управления одним каналом релейного рулевого привода на время превышения углом наклона величин зон нечувствительности секторов датчика угла, при этом величина зоны нечувствительности основного сектора равна требуемому углу наклона, дополнительного - разности угла наклона и величины амплитуды угла колебаний снаряда по углу атаки, а вспомогательного величине 2-3 амплитуд угла колебаний снаряда по углу атаки, отличающийся тем, что при превышении углом наклона продольной оси снаряда зон нечувствительности основного или дополнительного секторов формируется сигнал управления рулевым приводом первого канала и одновременно на каждом периоде вращения снаряда по крену анализируется наличие сигнала с основного сектора, при его наличии осуществляют операции Mn=М0+1, Ln=0, а при отсутствии Ln=L0+1, Mn=0, где Mn, Ln - целочисленные величины с начальными значениями М0=0, L0=0, назначают величину N количества анализируемых периодов вращения и при выполнении условия Mn=N величине Mn присваивают значение равное Mn=0 и включают следующий режим управления первым каналом рулевого привода, заключающийся в формировании команд по наличию сигнала с дополнительного и отсутствию сигнала со вспомогательного секторов датчика угла и определении величин Mn, Ln, при выполнении условия Ln=N величине Ln=N присваивают значение равное Ln=0 и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение равное Mn=0 и включают следующий режим управления первым каналом рулевого привода, заключающийся в формировании команд по наличию и отсутствию сигнала с вспомогательного сектора датчика угла, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение равное Ln=0 и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение равное Mn=0 и включают следующий режим управления, заключающийся в дополнительном формировании команды управления вторым каналом рулевого привода на полупериоде вращения снаряда по крену, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение равное Ln=0 и включают предыдущий режим управления рулевым приводом, а при выполнении условия Mn=N величине Mn присваивают значение равное Mn=0 и включают следующий режим управления, заключающийся в дополнительном формировании команды управления вторым каналом рулевого привода на периоде вращения снаряда по крену, определяют величины Mn, Ln, при выполнении условия Ln=N величине Ln присваивают значение равное Ln=0 и включают предыдущий режим управления рулевым приводом, при этом команды, подаваемые во второй канал рулевого привода, получают из команд управления первого канала смещением их по времени на величину Т/4, где Т - период вращения снаряда по крену.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Техническое описание и инструкция по эксплуатации | |||
| - М.: Военное издательство, 1990, с.21-29 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| Стенд для испытаний на износостойкость холодильных компрессоров | 1986 |
|
SU1408164A1 |
| US 5042742 A, 07.01.1997. | |||

