Изобретение относится к технике локации (радиолокации, гидролокации и т.д.) и может применяться для обнаружения и наблюдения аномалий на поверхности воды (неоднородностей волнения водной поверхности), к которым относятся, например, следы от движущихся надводных и подводных объектов, участки разлива нефтепродуктов на водной поверхности и др.
Известны способы обнаружения неоднородностей на водной поверхности, связанные с гашением сликов (неоднородности волнения, характеризующиеся пониженной по сравнению с окружающей поверхностью плотностью высокочастотных составляющих волнения) и основанные на отличии средней мощности, дисперсии или спектральной плотности флуктуации радиолокационных отражений от однородного волнения и слика [1, 2]. Эти способы основываются на контрастах дисперсий и спектральных плотностей флуктуации, которые соответствуют контрасту средних мощностей. Для обнаружения сликов также было предложено использовать контраст спектральных составляющих доплеровского спектра, то есть возможность обнаружения сликов по контрасту спектральных плотностей [3, 4]. Показано, что контраст высокочастотных составляющих доплеровского спектра рассеянного радиоизлучения существенно превосходит значения контраста, определяемого по средней мощности отраженных сигналов. Объясняется это тем, что высокочастотная часть спектра формируется за счет отражения от имеющих большую фазовую скорость более коротких капиллярных волн, которые при воздействии турбулентных возмущений гасятся сильнее. Однако указанные способы не обеспечивают обнаружение и наблюдение аномалий на поверхности воды с заданной вероятностью ложной тревоги (правильного обнаружения) в условиях исключительной неравномерности интенсивности фоновых отражений во времени и в пространстве.
Прототипом предложенного способа обнаружения аномалий на водной поверхности является способ обнаружения сликов на водной поверхности, описанный в работах [3-5]. Рассеяние радиоволн водной поверхностью при углах падения более тридцати градусов носит избирательный характер. Сигнал в обратном направлении формируется за счет рассеяния на составляющих поверхностного волнения, длина которых соизмерима с длиной волны облучающего электромагнитного поля и удовлетворяет условию пространственного резонанса. Интенсивность обратного рассеяния в этом случае пропорциональна квадрату высоты резонансной составляющей поверхностного волнения
p~h2(Λ0),
где Λ0 - длина волны.
Данная зависимость положена в основу радиотехнического метода обнаружения сликов на водной поверхности. Наблюдаемость сликов на водной поверхности характеризуется контрастом зон со сглаженным волнением по отношению к фону
Kp=P0/Pсл,
где P0, Pсл - средняя мощность радиоизлучения, рассеянного от однородного волнения (фона) и от слика соответственно. С учетом этого можно записать, что

где hг - высота волны в слике.
К недостатку прототипа следует отнести низкую эффективность способа при обнаружении и наблюдении сликов в условиях неравномерности интенсивности фоновых отражений локационного эхо-сигнала от водной поверхности во времени и в пространстве.
Цель изобретения - обнаружение аномалий на поверхности воды с заданной вероятностью ложной тревоги (правильного обнаружения) в условиях неравномерности интенсивности фоновых отражений локационного эхо-сигнала от поверхности воды во времени и в пространстве.
Для достижения этой цели предлагается способ обнаружения аномалий на водной поверхности, при котором правило принятия решения о наличии аномалии на водной поверхности не будет зависеть от неустойчивости фоновых отражений локационного эхо-сигнала (контрастный прием).
Рассмотрим описываемый способ обнаружения аномалий на водной поверхности, применительно к двум разнесенным участкам водной поверхности.
В предлагаемом способе обнаружения аномалий на водной поверхности, включающем в себя облучение водной поверхности радиоволнами, прием отраженного от них эхо-сигнала и принятие решения о наличии или отсутствии аномалии на основе контрастной обработки отраженного эхо-сигнала, решение о наличии аномалии принимается на основе определения величины контраста

где y1 и y2 - отраженные от двух некоррелированных участков водной поверхности локационные эхо-сигналы,
и сравнения полученной величины контраста z с пороговым значением контраста z0, при превышении которого принимается решение о наличии аномалии на поверхности воды.
При этом, пороговое значение контраста z0 выбирается, исходя из соображений оптимизации вероятности правильного обнаружения аномалий и/или вероятности правильного не обнаружения аномалий относительно вероятности ложной тревоги и/или вероятности пропуска аномалии в случае использования конкретного приемного устройства средства локации, например, радиолокационного приемника.
В качестве примера рассмотрим практическую реализацию контрастного приема локационных сигналов от двух разнесенных участков поверхности воды в судовой (и береговой) радиолокационной станции (РЛС). Условия радиолокационного наблюдения за водной поверхностью характеризуются исключительной неравномерностью фоновых отражений во времени и в пространстве [3]. Вредное влияние пространственно-временной неустойчивости фоновых отражений можно преодолеть с помощью контрастного метода приема. Контрастный приемник судовой (и береговой) РЛС, синтезированный по требованию независимости вероятности ложных тревог от мощности фоновых отражений, представляет собой устройство, образованное подключением к произвольному радиолокационному приемнику схем образования контраста и принятия решения.
Характеристики контрастного приемника, синтезированного в соответствии с требованием независимости вероятности ложной тревоги от мощности фоновых отражений, представлены в таблице. Указанные в таблице обозначения: ε - амплитуда сигнала на входе контрастного приемника; m<n - целые положительные числа; a, b и c - постоянные коэффициенты; D - вероятность правильного обнаружения; F - вероятность ложной тревоги; µ0 - отношение сигнал/фон по напряжению на входе приемника; µ - то же отношение на выходе интегратора при накоплении к импульсов; Г - гамма-функция; |F| - вырожденная гипергеометрическая функция; I - неполная бета-функция с верхним пределом x0 в интегральном представлении.
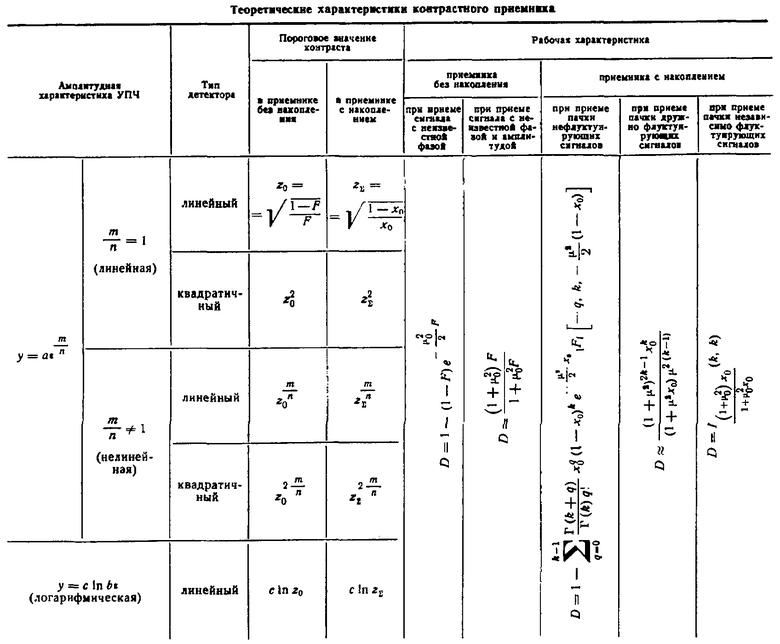
Порог обнаружения в контрастном приемнике зависит от амплитудной характеристики усилителя промежуточной частоты (УПЧ) судовой (береговой) РЛС, а в приемниках с накоплением - и от постоянной времени интегрирующей цепи (числа накапливаемых импульсов). В свою очередь, рабочие характеристики контрастного приемника не зависят от характера и количества входящих в него нелинейных элементов и определяются только видом принимаемых сигналов.
Блоки образования контраста и принятия решения представляют собой автономное устройство, при подключении которого к приемнику судовой (береговой) РЛС, возникает необходимость согласования порогового значения контраста, обеспечивающего заданный уровень вероятности ложных тревог, с техническими характеристиками (схемой) радиолокационного приемника. Такое согласование называется настройкой контрастного приемника.
Сущность изобретения поясняется следующими фигурами:
Фиг.1, на которой представлена типовая структурная схема контрастного приемника.
Фиг.2-7, на которых представлены функциональные схемы контрастных приемников, в соответствии с характеристиками, представленными в таблице 1:
на фиг.2 изображена двухканальная схема контрастного приемника со степенной амплитудной характеристикой (САХ), где 1 - усилитель промежуточной частоты (УПЧ) с амплитудной характеристикой, 2 - детектор приемника, 3 - устройство сравнения;
на фиг.3 изображена одноканальная схема контрастного приемника со степенной амплитудной характеристикой (САХ);
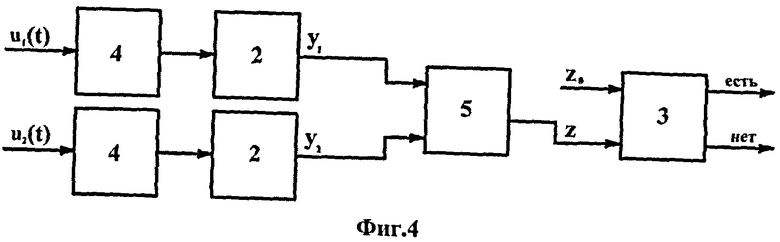
на фиг.4 изображена двухканальная схема контрастного приемника с логарифмической амплитудной характеристикой (ЛАХ), где 4 - логарифмический УПЧ, 5 - вычитающее устройство;
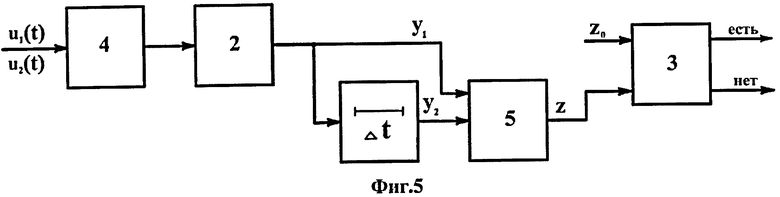
на фиг.5 изображена одноканальная схема контрастного приемника с логарифмической амплитудной характеристикой (ЛАХ);
на фиг.6 изображена двухканальная схема контрастного приемника с накоплением импульсов некогерентной пачки;
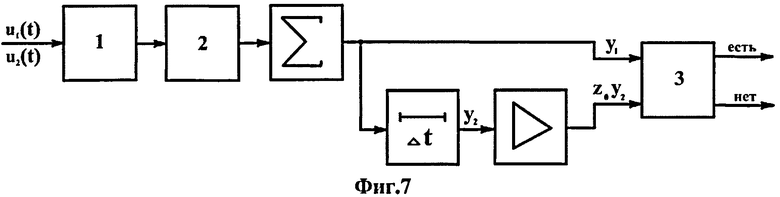
на фиг.7 изображена одноканальная схема контрастного приемника с накоплением импульсов некогерентной пачки.
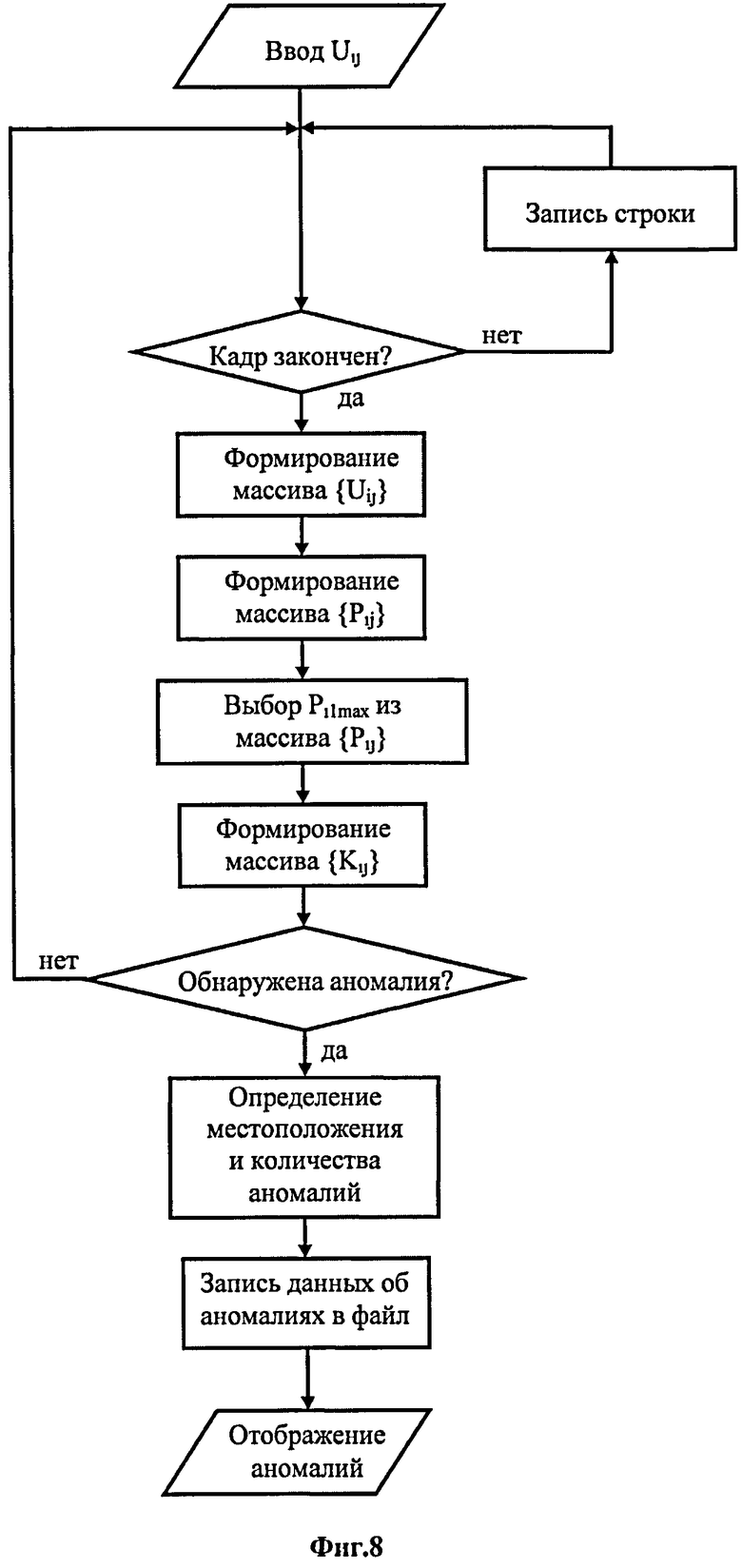
Фиг.8, на которой изображен обобщенный алгоритм работы системы обнаружения, отображения и документирования информации о загрязнении моря нефтепродуктами.
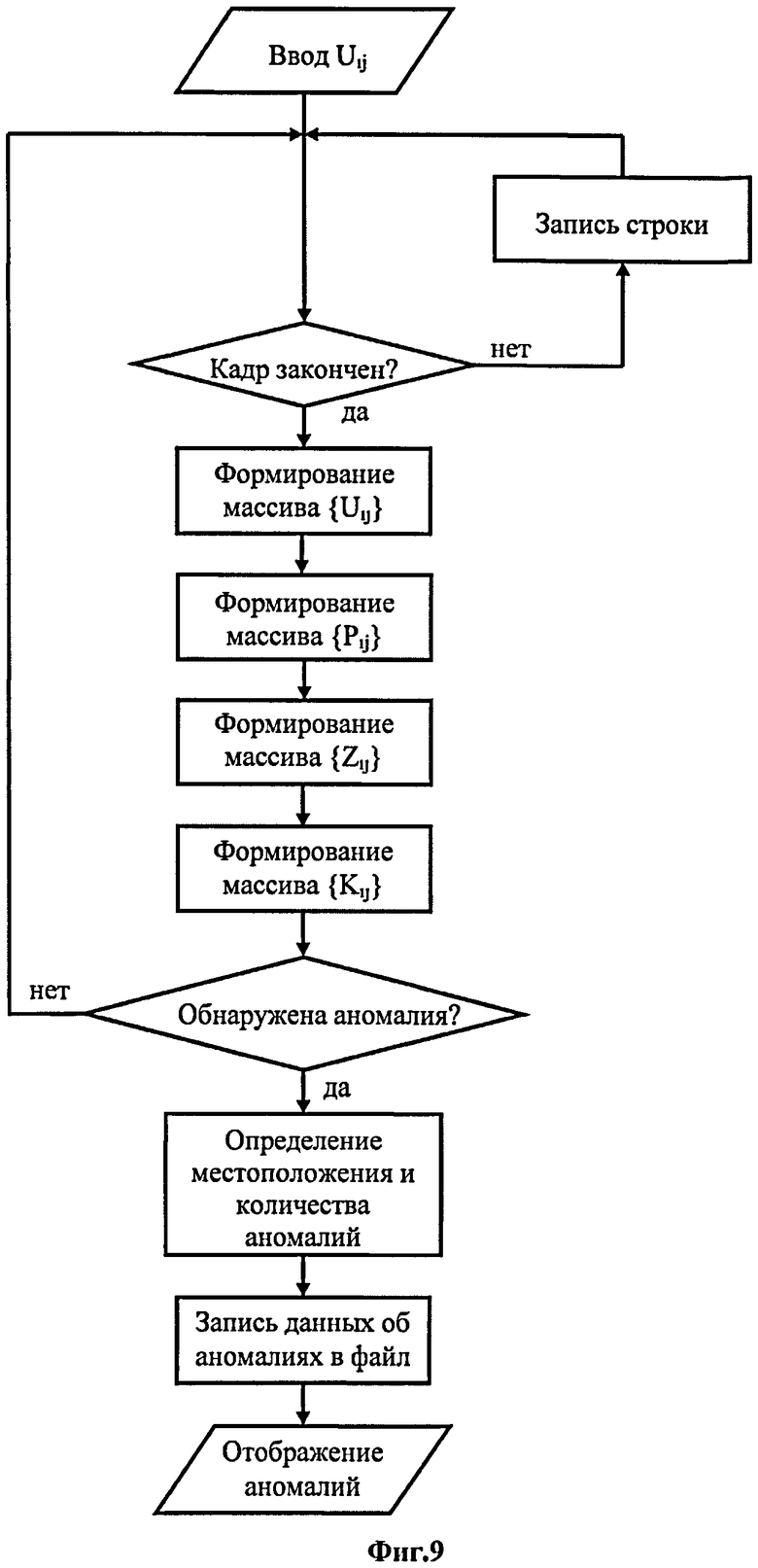
Фиг.9, на которой изображен модифицированный алгоритм функционирования системы обнаружения, отображения и документирования информации об аномалиях на поверхности воды.
Приведенные функциональные схемы контрастного приемника удобны при реализации их современными методами цифровой обработки сигналов. Рассмотрим вариант реализации контрастного приемника в виде алгоритма, пригодного для программной реализации, как на базе любого современного радар-процессора, так и на базе произвольного компьютерного радиолокационного индикатора. Алгоритмы такого класса принято относить ко вторичной обработке радиолокационной информации. Известен обобщенный алгоритм работы системы обнаружения, отображения и документирования информации о загрязнении моря нефтепродуктами [6]. Предложенный подход, в принципе, универсален и также применим к обнаружению турбулентных кильватерных следов движущихся надводных кораблей [7]. В целом, рассматриваемый алгоритм применим к обнаружению любых аномалий на водной поверхности (фиг.8). Кроме того, как это следует из [7], на основе данного алгоритма может быть реализована любая функциональная схема контрастного приемника, приведенная выше.
Ввод радиолокационной информации осуществляется с помощью платы радар-процессора, устанавливаемой в персональный компьютер (ПК) компьютерного радиолокационного индикатора (КРЛИ) [6, 7]. Радиолокационный сигнал, с выхода детектора приемника радиолокационной станции, поступает на вход аналого-цифрового преобразователя (АЦП) радар-процессора. На выходе АЦП радар-процессора с частотой 66 МГц формируются его отсчеты Uij, где: i - номер строки определяется азимутальным направлением зондирования (i=0…4096), j - номер отсчета в строке (j=1…n). Для каждой такой строки значения Uij с выхода аналого-цифрового преобразователя записываются в буферную память отсчетов, и после окончания преобразования в АЦП передаются в персональный компьютер (ПК) до начала следующей строки (фиг.8). Из массива {Uij} с учетом градуировочной характеристики приемного тракта радиолокационной станции формируется массив {Pij} мощностей сигналов, отраженных от водной поверхности. На основании анализа одномерного массива {Pi1}, выделенного из массива {Pij}, производится выбор максимального значения Pi1max первых отсчетов всех строк. Затем формируется массив {Kij} для выделения на поверхности воды участков с пониженным уровнем радиолокационных отражений от моря. Элементы массива Kij=0, если уровень отражений соответствует отражениям от чистой воды, и Kij=1 для участков с пониженным уровнем отражений, что соответствует наличию аномалии на поверхности воды.
Формирование массива {Kij} осуществляется построчно, на основании анализа массива {Pij}, начиная с элемента Pi1max. Данный алгоритм зависит от нестабильности интенсивности фоновых отражений от воды в пространстве и во времени, что полностью не исключает всех тех недостатков, которые характерны для способов, описанных в работах [1-5].
На фиг.9 представлен модифицированный алгоритм функционирования системы обнаружения, отображения и документирования информации об аномалиях на поверхности воды, реализующий функциональные схемы контрастного приемника радиолокационных сигналов, отраженных от мелкоструктурных составляющих в спектре волнения на водной поверхности, на фоне которых, как раз, и наблюдаются аномалии. Из массива мощностей сигналов {Pij}, отраженных водной поверхностью, формируется массив их контрастов {Zij}, сформированных согласно правилам, соответствующим функциональным схемам контрастных приемников, приведенным на фиг.2-7. Формирование массива {Kij}, для выделения на водной поверхности участков с пониженным уровнем радиолокационных отражений от воды (аномалий), осуществляется также построчно, согласно решающему правилу, соответствующему таблице 1, с заданным уровнем вероятности ложной тревоги при обнаружении аномалий:
- Kij=0 - уровень отражений соответствует отражениям от чистой воды;
- Kij=1 - участки с пониженным уровнем отражений, что соответствует наличию аномалий на водной поверхности.
Литература
1. Галаев Ю.М., Калмыков А.И., Курекин А.С. и др. Радиолокационное обнаружение нефтяных загрязнений морской поверхности // Известия АН СССР. Физика атмосферы и океана, 1977, т.13, №4, С.406-414;
2. Калмыков А.И., Пичугин А.П. Особенности обнаружения неоднородной морской поверхности радиолокационным методом. // Известия АН СССР. Физика атмосферы и океана, 1981, т.17, №7, С.754-761;
3. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности. - М.: РИЦ "Татьянин день", 1997. - 264 с;
4. Ушаков И.Е. Радиолокационные методы и средства получения информации о состоянии морской поверхности. Диссертация на соискание ученой степени доктора технических наук (специальность 05.11.13 - Приборы и методы контроля природной среды, веществ, материалов и изделий). - СПб.: СЗТУ, 2001. - 230 с.;
5. Способ обнаружения сликов на водной поверхности. А.С. 296380 (СССР), 1989. Автор: И.Е.Ушаков;
6. Ничипоренко Н.Т., Маренич И.Е., Петров А.В., Ушаков И.Е., Шишкин И.Ф. Обнаружение разливов нефтепродуктов в море радиолокационными средствами // Научные доклады 4 Международной конференции «Экология и развитие Северо-Запада России». - СПб., 1999. С.332-339;
7. Шишкин И.Ф., Сергушев А.Г. Контрастный прием сигналов при трассологических наблюдениях // Научно-технические ведомости СПбГПУ. Информатика. Телекоммуникации. Управление. - 2009. - №1 (72). С.67-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЫШЕННОЙ ЯРКОСТИ И КОНТРАСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483323C1 |
| Способ различения аномалий на водной поверхности средствами многочастотной СВЧ-радиолокации | 2015 |
|
RU2626233C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2548118C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее радиолокационным изображениям | 2023 |
|
RU2817178C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ НА МОРСКОЙ ПОВЕРХНОСТИ НЕКОНТАКТНЫМ РАДИОЛОКАЦИОННЫМ МЕТОДОМ | 2014 |
|
RU2582073C2 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 1997 |
|
RU2109304C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |



Изобретение относится к технике локации и может применяться для обнаружения и наблюдения аномалий на поверхности воды (неоднородностей волнения водной поверхности), к которым относятся, например, следы от движущихся надводных и подводных объектов, участки разлива нефтепродуктов на водной поверхности и др. Достигаемый технический результат изобретения - обнаружение аномалий на поверхности воды с заданной вероятностью ложной тревоги (правильного обнаружения) в условиях неравномерности интенсивности фоновых отражений локационного эхо-сигнала от поверхности воды во времени и в пространстве. Указанный результат достигается за счет того, что правило принятия решения о наличии аномалии на водной поверхности не будет зависеть от неустойчивости фоновых отражений локационного эхо-сигнала (контрастный прием). 9 ил., 1 табл.
Способ обнаружения аномалий на водной поверхности, включающий в себя облучение водной поверхности радиоволнами, прием отраженного от нее эхо-сигнала и принятие решения о наличии или отсутствии аномалии, отличающийся тем, что принимают решение о наличии или отсутствии аномалии на основе контрастной обработки отраженного эхо-сигнала, при этом решение о наличии аномалии принимается на основе определения величины контраста

где y1 и y2 - отраженные от двух некоррелированных участков водной поверхности локационные эхо-сигналы,
и сравнения полученной величины контраста z с пороговым значением контраста z0, при превышении которого принимается решение о наличии аномалии на поверхности воды.
| УШАКОВ И.Е., ШИШКИН И.Ф | |||
| Радиолокационное зондирование морской поверхности | |||
| - М.: РИЦ «Татьянин день», 1997, 264 с | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПОВЕРХНОСТНОГО ВОЛНЕНИЯ | 1990 |
|
RU2018873C1 |
| WO 2004006119 А2, 15.01.2004 | |||
| US 20090135046 A1, 28.05.2009 | |||
| US 7903218 N, 15.02.1993. | |||

