ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области локации, а именно к способам и системам локационного зондирования (циклического обзора) исследуемого пространства, и может быть использовано в радиолокации, в акустической локации, в гидролокации, в оптической локации, включая лазерную локацию, для обнаружения различных объектов, измерения их координат и параметров движения, а также для контроля состояния водной среды, земной и водной поверхности, воздушного пространства.
УРОВЕНЬ ТЕХНИКИ
Решение навигационных и локационных задач требует создания локационных систем зондирования земной и водной поверхности, подводного и воздушного пространства, различных конструкций с различными функциональными возможностями и способами функционирования.
Одним из основных факторов, ограничивающих технические характеристики локаторов, во многих случаях является малое отличие уровня сигналов, отраженных от целей и от окружающего фона, что обуславливает низкую яркость и низкую контрастность целей на локационных изображениях.
Известен способ формирования радиолокационного изображения, который реализован в известной радиолокационной системе, содержащей передающий модуль, антенный блок, приемный модуль, индикатор и блок синхронизации [1].
Известен способ формирования локационного изображения, который реализован в известной гидроакустической системе [2].
Известен способ формирования локационного изображения, который реализован в системе оптической локации [3].
Недостатками данных известных способов формирования локационных изображений и устройств для их реализации является отсутствие цифровой обработки сигналов и недостаточно яркое и контрастное отображения информации на экране, что обуславливает недостаточные эксплуатационные характеристики при реализации известных способов в известных технических устройствах.
Известно также, что в современных РЛС широко используются зондирующие сигналы с внутриимпульсной модуляцией и достаточно большой длительности [4]. Обнаружение сигнала от цели при этом включает временное сжатие принятого сигнала с помощью согласованного фильтра и последующее сравнение его с порогом обнаружения, при превышении которого принимается решение об обнаружении цели [5].
Сигнал после согласованной обработки представляет собой сжатый во времени сигнал (импульс), состоящий из главного лепестка, временное положение которого соответствует по дальности положению цели, и ряда дополнительных откликов - боковых лепестков, соответствующих другим (ложным) значениям дальности.
При большом уровне принимаемого сигнала наличие боковых лепестков может вызвать ложное обнаружение, при этом вместо одной цели обнаруживается несколько, что приводит к возрастанию уровня ложной тревоги.
Известны способ и устройство обнаружения отраженного от цели сигнала, в которых для уменьшения влияния боковых лепестков сжатого сигнала используется весовая обработка принимаемого сигнала, проводимая путем его фильтрации с использованием различных весовых функций, например функций Хэмминга, Тейлора и др. [6].
Известна также группа изобретений в области радиолокации, согласно которых для расширения арсенала технических средств для уменьшения влияния боковых лепестков сигнала при обнаружении одиночной радиолокационной цели осуществляют весовую обработку принимаемого электромагнитного колебания с использованием n≥2 весовых функций. При этом после каждой весовой обработки в области главного лепестка сигнала измеряют отношения уровня сигнала с заведомо наибольшим уровнем к уровню сигнала после других видов весовой обработки и сравнивают сигнал с заведомо наибольшим уровнем с порогом обнаружения, а указанные отношения - с их расчетными значениями. Принимают решение об обнаружении одиночной цели, если уровень сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, превышает уровень порога обнаружения и отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других типов весовой обработки отличаются от расчетных значений этих отношений не более чем на установленную величину [7].
Известно устройство для измерения характеристик поверхностного волнения, содержащее антенну, поворотное устройство антенны, датчик углового положения антенны, приемопередатчик, соединенный с антенной, синхронизатор, блок формирования стробирующих импульсов, интегратор и регистратор. Выход синхронизатора параллельно соединен с соответствующими входами приемопередатчика и блока формирования стробирующих импульсов. Кроме этого в устройство входят: электронный ключ устройства, блок выделения заднего фронта, делитель частоты, многоканальный накопитель, две линии задержки, анализатор, блок азимутальной селекции, содержащий N каналов азимута, каждый из которых содержит последовательно соединенные между собой источник постоянного напряжения, компаратор, генератор импульсов, элемент И, счетчик, а также электронный ключ, управляющий вход которого соединен с выходом элемента И. Информационные входы электронных ключей всех каналов объединены и соединены с выходом интегратора, а выход каждого электронного ключа соединен с соответствующим входом многоканального накопителя. Блок азимутальной селекции содержит также элемент ИЛИ, у которого N входов соединены с соответствующими выходами счетчиков каналов азимута. Вход сброса каждого счетчика соединен с выходом соответствующего генератора импульсов последующего канала. Выход элемента ИЛИ 8 соединен с управляющим входом N+1-го электронного ключа блока азимутальной селекции, информационный вход которого, являющийся входом блока азимутальной селекции, подключен к выходу блока выделения заднего фронта, а выход этого ключа подключен к объединенным вторым входам элементов И всех каналов. Выход генератора импульсов М-го канала, являющийся выходом блока азимутальной селекции, соединен с входом делителя частоты, а объединенные вторые входы компараторов всех каналов блока азимутальной селекции соединены с датчиком углового положения антенны. При этом электронный ключ устройства включен между выходом приемопередатчика и входом интегратора, а его управляющий вход соединен с блоком формирования стробирующих импульсов, который через блок выделения заднего фронта и первую линию задержки соединен с входом сброса интегратора. Кроме этого выход делителя частоты соединен параллельно с управляющими входами анализатора и регистратора непосредственно, а через вторую линию задержки соединен с входом сброса многоканального накопителя, каждый выход которого подключен к соответствующему входу анализатора, первый и второй выходы которого соединены с соответствующими входами регистратора [8].
Известно выполненное определенным образом устройство позиционирования аномалий морского волнения, обеспечивающее возможность получения информации о факте наличия и определение местоположения источника возникновения аномалий на поверхности морского волнения, посредством которого для повышения вероятности обнаружения и надежности сопровождения обнаруженных малозаметных целей на фоне мешающих переотражений от взволнованной морской поверхности обеспечивают возможность обработки информации в реальном масштабе времени, что существенным образом сокращает временные затраты на идентификацию обнаруженных малозаметных целей на фоне взволнованной морской поверхности [9].
Наиболее близким к предлагаемым изобретениям (прототипом) являются разработанные ранее при участи авторов и специалистов заявителя способ формирования локационного изображения и устройство для его реализации, реализованные в радиолокационной системе, содержащей антенный блок с приводом и вращающимся переходом, соединенный через СВЧ-тракт, выполняющий функции коммутатора, с передающим и приемным модулями, блок связи и синхронизации, получающий синхронизирующие импульсы от передающего модуля и обеспечивающий передачу команд управления и контроля к передатчику и приемнику, а также передачу видеосигналов с выхода приемного модуля через блок сопряжения и коммутации на индикатор, включающий компьютер с платой радар-процессора и монитор с возможностью формирования радиолокационного изображения [10].
В данной локационной системе запись поступающей в радар-процессор информации осуществляется в память, организованную в виде двух блоков (страниц). В одну из страниц записываются текущие данные (сигналы, соответствующие уровням отражений в элементах разрешения исследуемого пространства для заданных угловых направлений и дистанций), а на другую могут считываться данные, записанные ранее. Информация от радар-процессора через буфер обмена и шину поступает в компьютер для дальнейшей вторичной обработки, представления первичной и вторичной информации на мониторе, хранения и трансляции по локальным вычислительным сетям.
При этом первичная информация представляется в виде текущего локационного изображения, яркость элементов которого определяется уровнем отраженных сигналов в соответствующих элементах разрешения, то есть чем выше уровень отраженных сигналов, тем ярче соответствующие элементы радиолокационного изображения.
Техническим недостатком данного способа формирования локационного изображения и данной системы являются недостаточно высокие эксплуатационные возможности, а именно низкая контрастность на радиолокационных изображениях целей с малым (приближающемся к единице) отношением уровня сигналов, отраженных от объектов наблюдения (целей), к уровню сигналов, отраженных от окружающего фона, или малым отношением уровня сигналов, отраженных от фона, к уровню сигналов, отраженных от целей в тех случаях, когда уровень отражений от объектов наблюдения ниже уровня отражений от фона, а также невозможность выделения среди неподвижных объектов тех, которые имеют движущиеся элементы, например антенных постов с вращающимися антеннами или вертолетов с вращающимися винтами.
ЗАДАЧИ И ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
Задачей, на решение которой направлено создание предлагаемого изобретения, является повышение эксплуатационных характеристик локационной системы путем устранения указанных выше недостатков известной радиолокационной системы (прототипа) за счет реализации предложенного в изобретении способа создания локационного изображения и устройства для его реализации.
Технический результат от использования предлагаемого изобретения заключается в улучшение эксплуатационных характеристик локационной системы путем увеличения яркости и контраста (контрастности) на локационных изображениях объектов наблюдения (целей) с малым отношением уровня сигналов, отраженных от целей, к уровню сигналов, отраженных от фона сигналов, в частности при локационном обнаружении резиновых лодок на водной поверхности, или малым отношением уровня сигналов, отраженных от фона, к уровню сигналов, отраженных от целей, например при локационном обнаружении разливов нефтепродуктов (сликов) на поверхности воды, а также обеспечения возможности выделять неподвижные цели, имеющие движущиеся элементы, например антенные посты с вращающимися антеннами или вертолеты с вращающимися винтами или неподвижные и подвижные подводные цели.
Под яркостью элемента локационного изображения понимается величина светового потока с единицы площади средства визуальной индикации (монитора) [11].
Под контрастом (контрастностью) локационных изображений понимается отношение яркости самых светлых к яркости самых темных элементов локационных изображений [11].
Под контрастом целей на локационном изображении понимается отношение яркости целей к яркости окружающего фона или отношение яркости окружающего фона к яркости целей в тех случаях, когда яркость фона выше яркости целей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Требуемый технический результат достигается тем, что по способу создания локационного изображения, заключающемуся в циклическом (периодически повторяющемся) облучении исследуемого пространства, выделении в его пределах элементов пространственного разрешения, приеме сигналов, отраженных от объектов локации в соответствующих элементах разрешения, и формировании локационного изображения, согласно изобретению для каждого элемента разрешения за определенное количество циклов обзора исследуемого пространства определяют статистические характеристики отраженных сигналов и формируют локационное изображение, яркость элементов которого определяется значением соответствующей статистической характеристики отраженных сигналов или, преимущественно, результатом функционального преобразования одной или нескольких статистических характеристик отраженных сигналов.
При этом преимущественно формируют локационное изображение, яркость элементов которого определяется результатом перемножения статистических значений среднего уровня отражений отраженных сигналов на их дисперсию.
Кроме этого для каждого элемента разрешения за определенное количество циклов обзора исследуемого пространства определяют средний уровень и дисперсию сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществляют одновременное функциональное преобразование указанных характеристик, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов, и выполняют формирование локационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования в соответствующих элементах разрешения и на котором контраст целей, средний уровень отражений от которых превышает средний уровень отражений от окружающего фона, определяется по формуле
К1=(Е1D1)/(ЕфDф),
где K1 - контраст локационного изображения цели;
E1, Еф - средние уровни отражений от цели и от фона соответственно;
D1, Dф - дисперсии отражений от цели и от фона соответственно.
Или для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства определяют средний уровень и дисперсию сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществляют одновременное функциональное преобразование указанных характеристик, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов, и выполняют формирование локационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования в соответствующих элементах разрешения и на котором контраст целей (типа аномалий), средний уровень отражений от которых меньше среднего уровня отражений от окружающего фона, определяется по формуле
К2=(ЕфDф)/(Е2D2),
где K2 - контраст локационного изображения цели;
Еф, Е2 - средние уровни отражений от фона и от цели соответственно;
Dф, D2 - дисперсии отражений от фона и от цели соответственно.
Требуемый технический результат достигается тем, что устройство для создания локационного изображения, содержащее соединенные линиями связи антенный блок с возможностью циклического обзора исследуемого пространства, коммутатор, передающий и приемный модули, блок связи и синхронизации и индикатор с возможностью формирования локационного изображения, согласно изобретению выполнено с возможностью циклического облучения исследуемого пространства, выделения в его пределах элементов пространственного разрешения, приема сигналов, отраженных от объектов локации в соответствующих элементах разрешения, и формирования локационного изображения путем определения для каждого элемента разрешения за определенное определенное количество циклов обзора исследуемого пространства статистических характеристик отраженных сигналов и формирования радиолокационного изображения, яркость элементов которого определяется значением соответствующей статистической характеристики отраженных сигналов или результатом функционального преобразования одной или нескольких статистических характеристик отраженных сигналов.
При этом устройство для создания локационного изображения содержит последовательно соединенные линиями связи аналого-цифровой преобразователь, блок стробирования, блок накопления, вычислитель, блок выбора характеристик и блок функционального преобразования, а также блок управления, при этом вход аналого-цифрового преобразователя подключен к выходу видеоусилителя приемного модуля, а выход блока функционального преобразования - к входу индикатора, запускающий вход аналого-цифрового преобразователя, входы синхронизации блока стробирования и индикатора соединены с выходом блока связи и синхронизации, сигналы с блока управления поступают в блок связи и синхронизации, а также на управляющие входы блока накопления, вычислителя, блока выбора характеристик и блока функционального преобразования.
Кроме этого устройство для создания локационного изображения в преимущественном варианте исполнения содержит соединенные линиями связи обеспечивающий возможность циклического обзора исследуемого пространства антенный блок с приводом и вращающимся переходом, соединенный через СВЧ-тракт с передающим и приемным модулями, блок связи и синхронизации, получающий синхронизирующие импульсы от передающего модуля и обеспечивающий передачу команд управления и контроля к передатчику и приемнику, а также передачу видеосигналов с выхода приемного модуля через блок сопряжения и коммутации на индикатор, включающий средства обработки отраженных сигналов - компьютер с платой радар-процессора и монитор с возможностью формирования локационного изображения, при этом средства обработки отраженных сигналов и монитор выполнены с возможностью функционального преобразования характеристик отраженных сигналов путем вычисления за установленное количество циклов обзора исследуемого пространства (оборотов антенны) для каждого элемента пространственного разрешения характеристик закона распределения уровня отраженных сигналов, например среднего значения, дисперсии, коэффициента асимметрии, эксцесса; функционального преобразования отдельных характеристик или одновременного совместного функционального преобразования нескольких из указанных характеристик отраженных сигналов, например перемножения среднего уровня и дисперсии отраженных сигналов; а также формирования на мониторе (последовательно с первичным изображением) или его части (параллельно с первичным изображением) радиолокационного изображения, яркость элементов которого определяется значением соответствующей характеристики или результатом ее функционального преобразования либо результатом одновременного совместного функционального преобразования нескольких из указанных характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения.
При этом в устройстве для создания локационного изображения средство обработки отраженных сигналов и монитор выполнены с возможностью определения для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства среднего уровня и дисперсии сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществления одновременного функционального преобразования указанных характеристик, заключающегося в перемножении среднего уровня и дисперсии отраженных сигналов, и формирования локационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования для соответствующих элементов разрешения и на котором контраст целей, средний уровень отражений от которых превышает средний уровень отражений от окружающего фона, определяется по формуле
К1=(Е1D1)/(ЕфDф),
где K1 - контраст локационного изображения цели;
Е1, Еф - средние уровни отражений от цели и от фона соответственно;
D1, Dф - дисперсии отражений от цели и от фона соответственно.
Или в устройстве для создания локационного изображения средство обработки отраженных сигналов и монитор выполнены с возможностью определения для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства среднего уровня и дисперсии сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществления одновременного функционального преобразования указанных характеристик, заключающегося в перемножении среднего уровня и дисперсии отраженных сигналов, и формирования радиолокационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования для соответствующих элементов разрешения и на котором контраст целей, средний уровень отражений от которых меньше среднего уровня отражений от окружающего фона, определяется по формуле
К2=(ЕфDф)/(Е2D2),
где K2 - контраст локационного изображения цели;
Еф, Е2 - средние уровни отражений от фона и от цели соответственно;
Dф, D2 - дисперсии отражений от фона и от цели соответственно.
Кроме этого устройство для создания локационного изображения содержит присоединенный к компьютеру дополнительный монитор с возможностью отображения на нем радиолокационного изображения, яркость элементов которого определяется значением соответствующей характеристики закона распределения отраженных сигналов или результатом ее функционального преобразования либо результатом одновременного совместного функционального преобразования нескольких из указанных характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения.
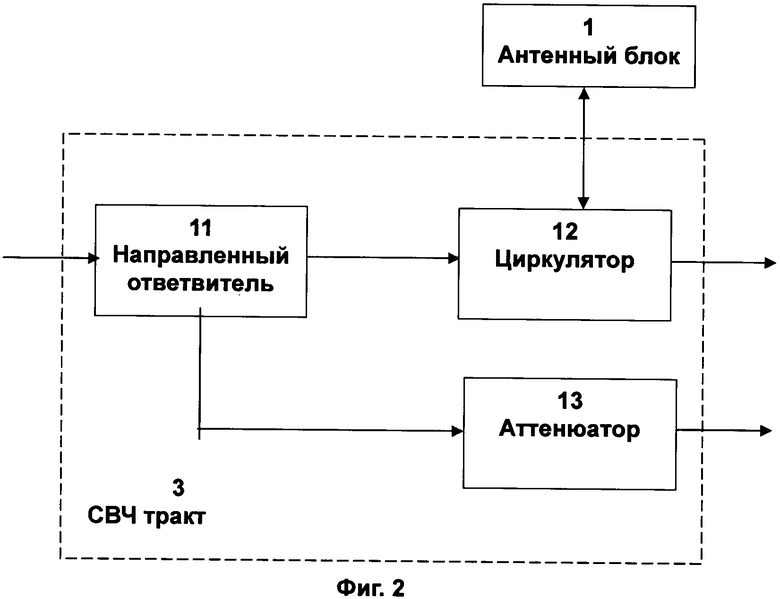
Кроме этого в устройстве для создания локационного изображения СВЧ-тракт содержит направленный ответвитель, циркулятор и аттенюатор, при этом вход направленного ответвителя соединен с выходом передающего модуля, а выход направленного ответвителя - с первым плечом циркулятора, второе плечо которого соединено с антенным блоком, а третье - с входом устройства защиты приемника приемного модуля, ответвляющий выход направленного ответвителя через аттенюатор соединен с входом смесителя АПЧ гетеродина приемного модуля.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Предлагаемое изобретение иллюстрируется следующими графическими материалами на примере радиолокационной системы:
На фиг.1 показана структурная схема варианта конструктивного исполнения устройства для реализации предлагаемого способа создания локационного изображения, включающего соединенные линиями связи антенный блок 1, передающий модуль 2, СВЧ-тракт 3, приемный модуль 4, блок связи и синхронизации 5, блок сопряжения 6, и индикатор 7, в преимущественном варианте включающий компьютер 8 с платой радар-процессора, монитор 9 и возможный, но не обязательный дополнительный монитор 10.
На фиг.2 - вариант структурной схемы СВЧ-тракта 3, соединенного линиями связи с антенным блоком 1, передающим модулем 2 и приемным модулем 4, содержащего соединенный с передающим модулем направленный ответвитель 11, а также соединенные с приемным модулем циркулятор 12, аттенюатор 13.
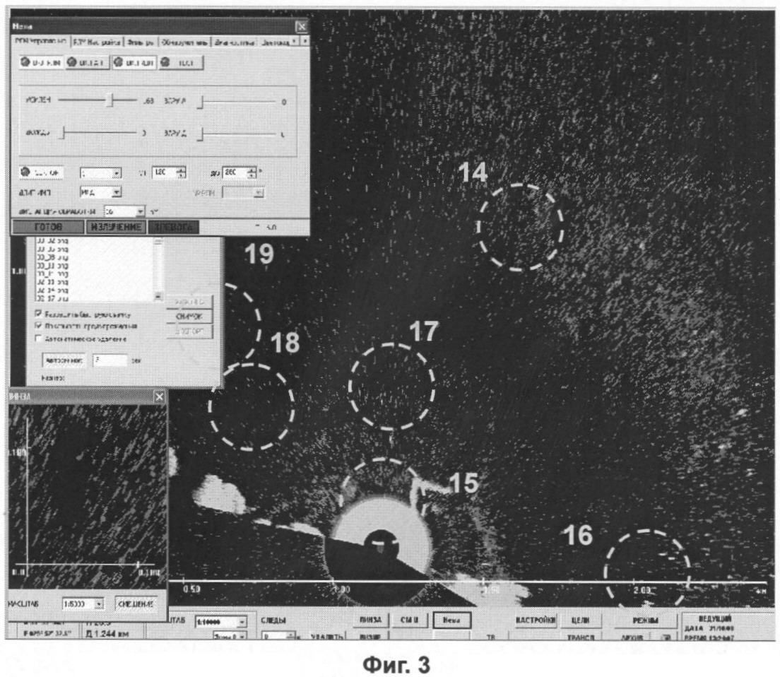
На фиг.3 - пример радиолокационных изображений на основной мониторе 9, полученных за один цикл обзора (один оборот антенны), где недостаточная яркость и контрастность элементов радиолокационного изображения пропорциональна уровню отраженных сигналов.
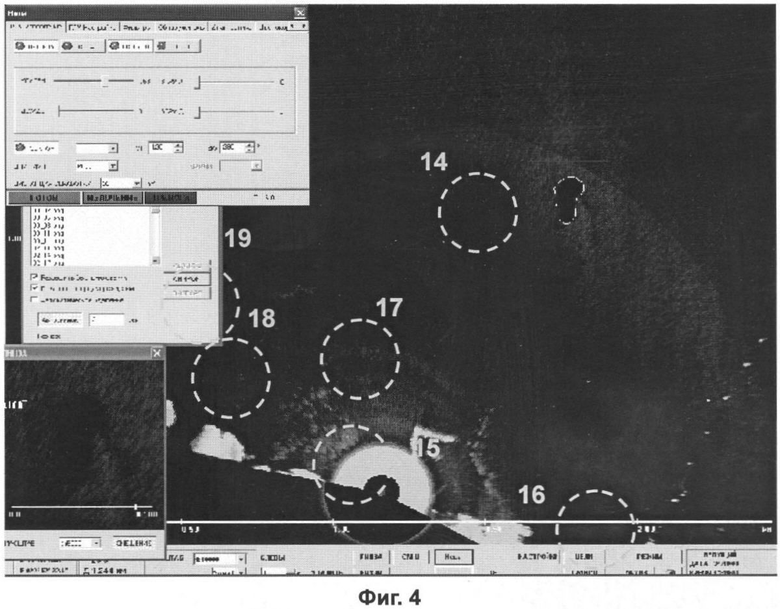
На фиг.4 - пример радиолокационного изображения на основном мониторе 9 после накопления за 20 циклов обзора (20 оборотов антенны), где яркость элементов радиолокационного изображения пропорциональна среднему статистическому уровню отраженных сигналов.
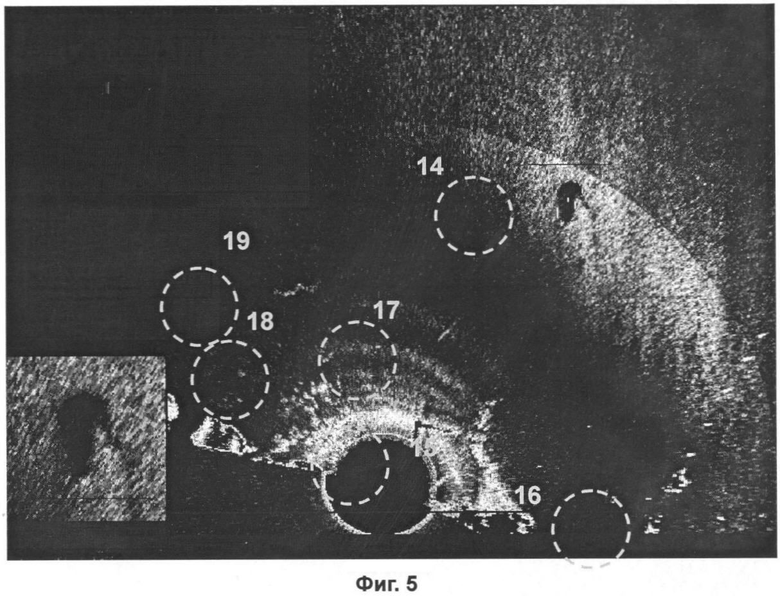
На фиг.5 - пример радиолокационного изображения на дополнительном мониторе 9 после накопления за 20 циклов обзора, в котором яркость элементов радиолокационного изображения пропорциональна произведению среднего уровня отражений на дисперсию отраженных сигналов.
На фиг.3, фиг.4, фиг.5 в левом нижнем углу показаны фрагменты радиолокационных изображений, содержащие слик, а также обозначены области, содержащие различные цели: 14 - слик, вызванный разливом небольшого количества (около трех литров) дизельного топлива; 15 - лодочный пирс; 16 - групповая малоразмерная цель (гряда торчащих над водой камней); 17 - движущаяся двухместная резиновая лодка; 18 - одноместная резиновая лодка; 19 - распределенная цель (полоса водорослей-трава).
ОСУЩЕСТВЛЕНИЕ И ПРОМЫШЛЕННАЯ РЕАЛИЗАЦИЯ ИЗОБРЕТЕНИЯ
Заявляемый способ создания локационного изображения преимущественно осуществляется следующим образом:
С помощью антенного блока обеспечивается циклическое (регулярно повторяющееся) облучение исследуемого пространства и прием отраженных сигналов;
путем дискретизации по угловым координатам и дальности (или стробирования) в пределах исследуемого пространства выделяют элементы пространственного разрешения;
осуществляют обработку сигналов, отраженных от объектов локации в каждом из выделенных элементов разрешения, заключающуюся в вычислении для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства характеристик закона распределения уровня отраженных сигналов, например среднего уровня отражений, дисперсии, коэффициента асимметрии, эксцесса;
формируют радиолокационное изображение, яркость элементов которого определяется значением соответствующей характеристики закона распределения уровня отраженных сигналов или результатом ее функционального преобразования либо результатом одновременного совместного функционального преобразования нескольких из указанных характеристик, например результатом перемножения среднего уровня отражений на их дисперсию.
При локационном зондировании (циклическом обзоре) исследуемого пространства с использованием заявляемого изобретения преимущественно решают задачи обнаружения объектов (целей), которые в общем случае разделяют на два вида.
Первый вид - это объекты, отраженные сигналы от которых превышают уровень отраженных сигналов от окружающего фона.
Второй вид - это аномалии, уровень отраженных сигналов от которых ниже уровня отраженных сигналов от окружающего фона. К таким целям относятся, например, вырубки на фоне лесных массивов, участки водной поверхности с выглаженной рябью, так называемые слики, обусловленные, например, загрязнениями водной поверхности нефтепродуктами [12].
Контраст целей первого вида определяется соотношением

где E1, Еф - средние уровни отражений от цели и от фона соответственно.
При формировании локационного изображение с использованием других характеристик закона распределения уровня отраженных сигналов контраст цели, определяемый по отношению выбранных характеристик, будет

где X1, Хф - выбранная характеристика отражений от цели и от фона соответственно.
Например, при расчете дисперсий отражений контраст цели, определяемый по отношению дисперсий, будет

где D1, Dф - дисперсии отражений от цели и от фона соответственно.
Для целей второго вида (аномалий) соответствующие контрасты определяют соотношениями:



где Е2, Х2, D2 - соответственно средний уровень, характеристика закона распределения и дисперсия уровня отражений от аномалии.
Согласно предлагаемым способу создания локационного изображения и устройству для его реализации яркость элементов локационного изображения определяется значением выбранной статистической характеристики закона распределения уровня отражений в соответствующем элементе разрешения (например, среднего уровня отражений, дисперсии, коэффициента асимметрии, эксцесса) или результатом ее функционального преобразования либо результатом одновременного совместного функционального преобразования нескольких из указанных статистических характеристик, например результатом перемножения среднего уровня отражений на их дисперсию.
Согласно предпочтительному варианту реализации предлагаемой локационной системы отображаемые на дополнительном мониторе 23 или на соответствующей части монитора 22 яркость элементов радиолокационных изображений пропорциональна произведению среднего уровня на дисперсию отраженных сигналов в соответствующих элементах разрешения, а контрасты радиолокационных изображений целей определяются соотношениями, учитывающими указанное совместное функциональное преобразование характеристик отраженных сигналов, и определяются формулами:
для первого вида целей

для второго вида целей (аномалий)

В результате те объекты, для которых контраст дисперсий больше единицы, в соответствии с формулами (7) и (8) на локационном изображении дополнительного монитора 23 или на соответствующей части монитора 22 будут иметь больший контраст, чем первичные изображения на мониторе 22 или чем первичные изображения на соответствующей части монитора 22.
К таким объектам относятся надводные цели и неподвижные наземные цели, имеющие движущиеся элементы, например, антенный пост с вращающимися антеннами или стоящий вертолет с вращающимися винтами, а также слики на водной поверхности.
Известно [13], что контрасты аномалий (сликов) на морской поверхности, определяемые по уровню характеристик отраженных сигналов и по их дисперсиям, приблизительно одинаковы.
Следовательно, KE2≈KD2, тогда контраст аномалий (сликов) на дополнительном мониторе 10 или на соответствующей части монитора 9 будет KE2≈(KD2)2.
Таким образом, контраст аномалий (сликов) на дополнительном мониторе 10 или на соответствующей части монитора 9 по предлагаемому новому методу функционального преобразования характеристик отраженных сигналов будет приблизительно равен квадрату контраста первичного изображения на мониторе 9 или на соответствующей его части.
Это обеспечивает повышение вероятности обнаружения слика (аномалии) на радиолокационном изображении, следовательно существенно улучшает эксплуатационные характеристики локационной системы.
Стабильные объекты, например, строения, неподвижные цели, уровень отражений от которых выше уровня отражений от фона, имеют малую дисперсию уровня отражений.
Следовательно, контраст дисперсий, а соответственно числитель в формуле (7), для таких целей будет близким к нулю.
Такие цели на дополнительном мониторе 10 или на соответствующей части монитора 9 будут отображаться в виде темных пятен, в то время как на мониторе 9 или на соответствующей части монитора 9 они будут отображаться в виде светлых отметок.
Неподвижные цели, имеющие подвижные элементы, например антенные посты с вращающимися антеннами или стоящие вертолеты с вращающимися винтами, уровень отражений от которых выше уровня отражений от окружающего фона, имеют в то же время большую дисперсию уровня отраженных от них сигналов.
Такие цели будут отображаться в виде светлых отметок как на мониторе 9, так и на дополнительном мониторе 10, или на обеих частях монитора 9.
Это дает возможность при использовании предлагаемого способа, а также при его реализации посредством предлагаемого устройства и предлагаемой локационной системы выделять неподвижные цели, имеющие движущиеся элементы, например антенные посты с вращающимися антеннами или стоящие вертолеты с вращающимися винтами, чем также улучшаются эксплуатационные характеристики локационной системы.
Заявляемое устройство для реализации предлагаемого способа создания локационного изображения в предпочтительном, но не обязательном варианте его конструктивного исполнения конструктивно содержит соединенные линиями связи антенный блок с возможностью циклического обзора исследуемого пространства и передачи информации о направлении зондирования, коммутатор, передающий и приемный модули, блок связи и синхронизации, индикатор с возможностью формирования локационного изображения, АЦП, блок стробирования, блок накопления, вычислитель, блок выбора характеристик, блок функционального преобразования, блок управления.
Заявляемое устройство, в предпочтительном, но не обязательном варианте его конструктивного исполнения, функционирует следующим образом:
Антенный блок 1 обеспечивает циклический обзор исследуемого пространства и прием отраженных в обратном направлении сигналов, а также передачу информации о направлении зондирования в блок связи и синхронизации 5.
В передающем модуле 2 формируется импульс заданной длительности на установленной несущей частоте, который через коммутатор 3 поступает в антенный блок 1 и излучается антенной в пространство.
В передающем модуле 2 формируется также синхроимпульс.
Незначительная часть мощности импульса передатчика через коммутатор 3 подается в приемный модуль 4 и используется в качестве опорного сигнала или для АПЧ гетеродина.
Принятый антенной сигнал через коммутатор 3 поступает на вход приемного модуля 4, который обеспечивает усиление принятого сигнала, преобразование частоты, усиление сигнала промежуточной частоты, детектирование и усиление видеосигнала.
Блок 5 связи и синхронизации обеспечивает передачу команд управления и контроля к передающему и приемному модулям, а также синхронизацию работы аналого-цифрового преобразователя (далее - «АЦП»), блока стробирования и индикатора 7.
АЦП осуществляет дискретизацию и оцифровку отраженных сигналов, что обеспечивает формирование отсчетов, соответствующих отражениям от объектов в соответствующих элементах разрешения по дальности.
На выходе блока стробирования выделяются сигналы, соответствующие уровням отражений в соответствующих элементах разрешения, при фиксированных угловых направлениях и дальности.
В блоке накопления осуществляется накопление сигналов за установленное, задаваемое с блока управления, количество циклов обзора исследуемого пространства.
Вычислитель после накопления информации за установленное количество циклов обзора исследуемого пространства обеспечивает вычисление числовых характеристик закона распределения уровня отраженных сигналов.
В блоке выбора характеристик в соответствии с сигналом, например в виде некоторого кода или числа, поступающим с блока управления, выбирается одна или некоторый набор характеристик отраженных сигналов.
В блоке функционального преобразования осуществляется функциональное преобразование выбранной характеристики отраженных сигналов или одновременное совместное функциональное преобразование набора выбранных характеристик, вид которого задается путем подачи соответствующего сигнала с блока управления, например в виде некоторой кодовой последовательности или числа.
С блока управления через блок 5 связи и синхронизации осуществляется также управление передающим модулем 2 (установка рабочей частоты и длительности импульса) и приемным модулем 4 (установка коэффициента усиления).
Индикатор 7 обеспечивает формирование локационного изображения, яркость элементов которого определяется результатом функционального преобразования характеристик сигналов, отраженных объектами лоцирования в соответствующих элементах разрешения.
Заявляемая локационная система конструктивно содержит соединенные линиями связи антенный блок, СВЧ-тракт, передающий и приемный модули, блок связи и синхронизации, средства обработки - компьютер с радар-процессором, монитор с возможностью формирования радиолокационных изображений или основной и дополнительный монитор.
Заявляемая локационная система в предпочтительном, но не обязательном варианте конструктивного исполнения функционирует следующим образом:
Антенный блок 14 с приводом и вращающимся переходом обеспечивает циклическое движение антенны, излучение ею СВЧ-радиоимпульсов и прием отраженных в обратном направлении радиосигналов.
В передающем модуле 2 формируется СВЧ-радиоимпульс заданной длительности, который через направленный ответвитель 11 и циркулятор 12 СВЧ-тракта 3 поступает в антенный блок 1 и излучается антенной в пространство.
В передающем модуле 2 формируется также синхроимпульс.
Незначительная часть мощности импульса передатчика через элементы СВЧ-тракта 3, направленный ответвитель 11 и аттенюатор 13 подается в приемный модуль 4 для АПЧ гетеродина.
Принятый антенной сигнал через циркулятор 12 СВЧ-тракта 3 поступает на вход приемного модуля 17, который обеспечивает защиту приемника от просачивающегося при излучении импульса, усиление принятого СВЧ-сигнала, преобразование частоты, усиление сигнала промежуточной частоты, детектирование и усиление видеосигнала.
Блок связи и синхронизации 5 обеспечивает передачу команд управления и контроля к передающему и приемному модулям, а также передачу видеосигнала с выхода приемного модуля 4 через блок сопряжения и коммутации 6 на индикатор 7, а именно на вход компьютера 8 с платой радар-процессора.
Радар-процессор обеспечивает дискретизацию, оцифровку видеосигналов и их передачу в компьютер.
Управление режимами работы радар-процессора осуществляется оператором путем передачи команд через шину компьютера.
Компьютер 8 осуществляет функциональную обработку характеристик принятых отраженных сигналов и обеспечивает отображение первичной и вторичной информации на мониторе 9 и дополнительном мониторе 10 или на соответствующих частях монитора 9.
Патентуемая радиолокационная система работает следующим образом.
Сформированный в передающем модуле 2 СВЧ-радиоимпульс заданной длительности через направленный ответвитель 11 и циркулятор 12 СВЧ-тракта 3 поступает в антенный блок 14 и излучается антенной в пространство.
В передающем модуле 2 формируется также синхроимпульс, передний фронт которого совпадает с передним фронтом излучаемого сигнала, который подается на вход блока связи и синхронизации 5. Незначительная часть мощности импульса передатчика через направленный ответвитель 11 и аттенюатор 13, входящие в СВЧ-тракт 3, подается в приемный модуль 4 для АПЧ гетеродина.
Принятый антенной отраженный сигнал через циркулятор 12 СВЧ-тракта 3 поступает на вход приемного модуля 4, на выходе которого получается видеосигнал, соответствующий уровню отражений в заданном направлении зондирования.
Блок связи и синхронизации 5 обеспечивает передачу команд управления и контроля к передающему и приемному модулям, а также передачу видеосигнала с выхода приемного модуля 4 через блок сопряжения и коммутации 6 на индикатор 7, а именно на вход компьютера 8 с платой радар-процессора.
Радар-процессор обеспечивает дискретизацию, оцифровку уровня дискретных отсчетов видеосигналов и их передачу через шину компьютера в компьютер для их дальнейшей обработки.
Управление оператором режимами работы радар-процессора осуществляется путем передачи команд через шину компьютера.
Компьютер осуществляет обработку принятых сигналов, отображение первичной и вторичной информации на мониторе 9 и дополнительном мониторе 10 или на соответствующих частях монитора9, хранение и трансляцию полученной информации по локальным вычислительным сетям.
При этом первичная информация на мониторе 9 представлена в виде текущего радиолокационного изображения, яркость элементов которого соответствует уровню сигналов, отраженных от объектов локации в соответствующих элементах разрешения.
При обработке отраженных сигналов для каждого элемента разрешения вычисляются характеристик отраженных сигналов: среднее значение и дисперсия - за устанавливаемое оператором определенное количество циклов обзора исследуемого пространства (оборотов антенны); выполняется одновременное функциональное преобразование характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов.
Яркость элементов функционально преобразованного радиолокационного изображения на дополнительном мониторе 10 или на соответствующей части монитора 9 определяется результатом функционального преобразования характеристик сигналов для соответствующих элементов разрешения.
На фиг.4 показан пример радиолокационного изображения, полученного за один цикл обзора (один оборот антенны), на основном мониторе 9 (яркость элементов радиолокационного изображения пропорциональна уровню отраженных сигналов).
На фиг.5 - пример радиолокационного изображения на основном мониторе после накопления за 20 циклов обзора (оборотов антенны), яркость элементов радиолокационного изображения пропорциональна среднему уровню отраженных сигналов.
На фиг.6 - пример радиолокационного изображения на дополнительном мониторе после накопления за 20 циклов обзора (яркость элементов радиолокационного изображения пропорциональна произведению среднего уровня отражений на дисперсию отраженных сигналов).
Средний уровень и дисперсия отраженных сигналов рассчитывались для 20 оборотов антенны.
На фиг.4, фиг.5, фиг.6 в левом нижнем углу показаны фрагменты радиолокационных изображений, содержащие слик, а также обозначены области, содержащие различные цели: 27 - слик, вызванный разливом небольшого количества (около трех литров) дизельного топлива; 28 - лодочный пирс; 29 - групповая малоразмерная цель (гряда торчащих над водой камней); 30 - движущаяся двухместная резиновая лодка; 31 - одноместная резиновая лодка; 32 - распределенная цель (полоса водорослей - трава).
Анализ приведенных на фиг.4, фиг.5 и фиг.6 радиолокационных изображений показывает, что на дополнительном мониторе уровень контраста целей на поверхности моря (14 - слика, вызванного разливом небольшого количества (около трех литров) дизельного топлива; 15 - лодочного пирса; 16 - групповой малоразмерной цели (гряда торчащих над водой камней); 17 - движущаяся двухместная резиновая лодка; 18 - одноместная резиновая лодка; 19 - распределенная цель (полосы водорослей - травы) обеспечивает их уверенное визуальное наблюдение, в то время как на основном мониторе выделение указанных целей затруднительно.
Пирс 15, являющийся стационарной целью с малой дисперсией уровня отражений, на основном мониторе отображается светлой отметкой, а на дополнительном мониторе 10 (или на соответствующей части монитора 9) - в виде темного пятна.
Это подтверждает возможность выделения с помощью предлагаемого изобретения стационарных (неподвижных) целей как результат учета различий флуктуационных статистических характеристик (дисперсии уровня отражений) сигналов, отраженных такими целями.
Таким образом, приведенные данные показывают, что предлагаемые способ и устройство обеспечивают существенное улучшение эксплуатационных характеристик локационной системы, а именно позволяют формировать и наблюдать контрастные локационные изображения при обнаружении целей с малым отношением уровня сигналов, отраженных от цели, к уровню сигналов, отраженных от окружающего фона, или малым отношением уровня сигналов, отраженных от фона, к уровню сигналов, отраженных от интересующего объекта сигналов, например таких как плохо различимые обычными локационными системами резиновые лодки или аномалии в виде разливов нефтепродуктов, а также позволяют выделять неподвижные цели, имеющие движущиеся элементы, например антенные посты с вращающимися антеннами или стоящие вертолеты с вращающимися винтами.
Заявленные способ и устройство могут быть реализованы на базе аппаратно-программных комплексов на основе обычно используемого в локационной технике оборудования и соответствующего программного обеспечения.
В качестве материалов и блоков при изготовлении отдельных узлов и деталей устройства в целом могут быть использованы различные материалы и комплектующие, используемые обычно в локационной технике.
Конкретные параметры и отдельные особенности конструктивного исполнения отдельных узлов могут быть выбраны из стандартных типоразмеров и стандартов локационной техники.
Источники информации
1. Байрашевский A.M., Ничипоренко Н.Т. Судовые радиолокационные системы. - М.: Транспорт, 1982, с.294-305 (аналог).
2. Урик Роберт Дж. Основы гидроакустики / Пер. с англ. - Л.: Судостроение, 1978. с.34-39 (аналог).
3. Справочник по радиолокации. Под ред. М.Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К.Н.Трофимова. Том 4. Радиолокационные станции и системы. Под ред. М.М.Вейсбейна. М.: Сов. радио, 1978, с.290-296.
4. Справочник по радиолокации. / Под ред. М. Сколника, т.3, М.: Сов. радио, 1979, с.400, 402.
5. Теоретические основы радиолокации. / Под ред. Я.Д.Ширмана. Сов. радио, 1970, с.110-114, рис.3.19.
6. Справочник по радиолокации. / Под ред. М.Сколника, т.3, М.: Сов. радио, 1979, с.430.
7. RU 2339969, G01S 13/00, Опубликовано: 27.11.2008.
8. RU 2018873, G01S 13/95. Устройство для измерения характеристик поверхностного волнения / Ушаков И.Е., заявитель Институт экологических проблем Севера Уральского отделения РАН, патентообладатель И.Е.Ушаков. - №4881265/09; заявл. 11.11.1990; опубл. 30.08.1994.
9. RU 65242, G01S 13/00, G01S 13/06, G01S 13/46, Опубликовано: 27.07.2007.
10. RU Патент №2155354, G01S 13/08 (прототип).
11. Артюшин Л.Ф. Контраст фотографического изображения // Фотокинотехника: Энциклопедия / Главный редактор Е.А.Иофис - М.: Советская энциклопедия, 1981.
12. Иванов А.Ю. Слики и пленочные образования на космических радиолокационных изображениях // Исследования Земли из космоса. 2007, №3, с.73-96.
13. Волков A.M., Ефимов В.Б., Курекин А.С. и др. Радиолокационные исследования неоднородностей поверхности океана // Успехи современной радиоэлектроники. 2003, №10, с.41-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛИЙ НА ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2503029C2 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| Устройство разноракурсного многопозиционного синтезирования комплексного изображения земной поверхности | 2020 |
|
RU2756904C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
Изобретение относится к области локации и может быть использовано в радиолокации, в акустической локации, в гидролокации, в оптической локации, включая лазерную локацию, для обнаружения различных объектов, измерения их координат и параметров движения, а также для контроля состояния водной среды, земной и водной поверхности, воздушного пространства. Достигаемый технический результат - улучшение эксплуатационных характеристик локационной системы. Для улучшения эксплуатационных характеристик локационной системы путем увеличения яркости и контраста (контрастности) на локационных изображениях объектов наблюдения (целей) с малым отношением уровня сигналов, отраженных от целей, к уровню сигналов, отраженных от фона сигналов (при локационном обнаружении резиновых лодок на водной поверхности), или малым отношением уровня сигналов, отраженных от фона, к уровню сигналов, отраженных от целей (при локационном обнаружении разливов нефтепродуктов (сликов) на поверхности воды), а также обеспечения возможности выделять неподвижные цели, имеющие движущиеся элементы (антенные посты с вращающимися антеннами), или вертолеты с вращающимися винтами, или неподвижные и подвижные подводные цели, согласно способа создания локационного изображения, заключающегося в циклическом облучении исследуемого пространства, выделении в его пределах элементов пространственного разрешения, приеме сигналов, отраженных от объектов локации в соответствующих элементах разрешения, и формировании локационного изображения, для каждого элемента разрешения за определенное количество циклов обзора исследуемого пространства определяют статистические характеристики отраженных сигналов и формируют локационное изображение, яркость элементов которого определяется значением соответствующей статистической характеристики отраженных сигналов или результатом функционального преобразования одной или нескольких статистических характеристик отраженных сигналов. 3 н. и 7 з.п. ф-лы, 5 ил.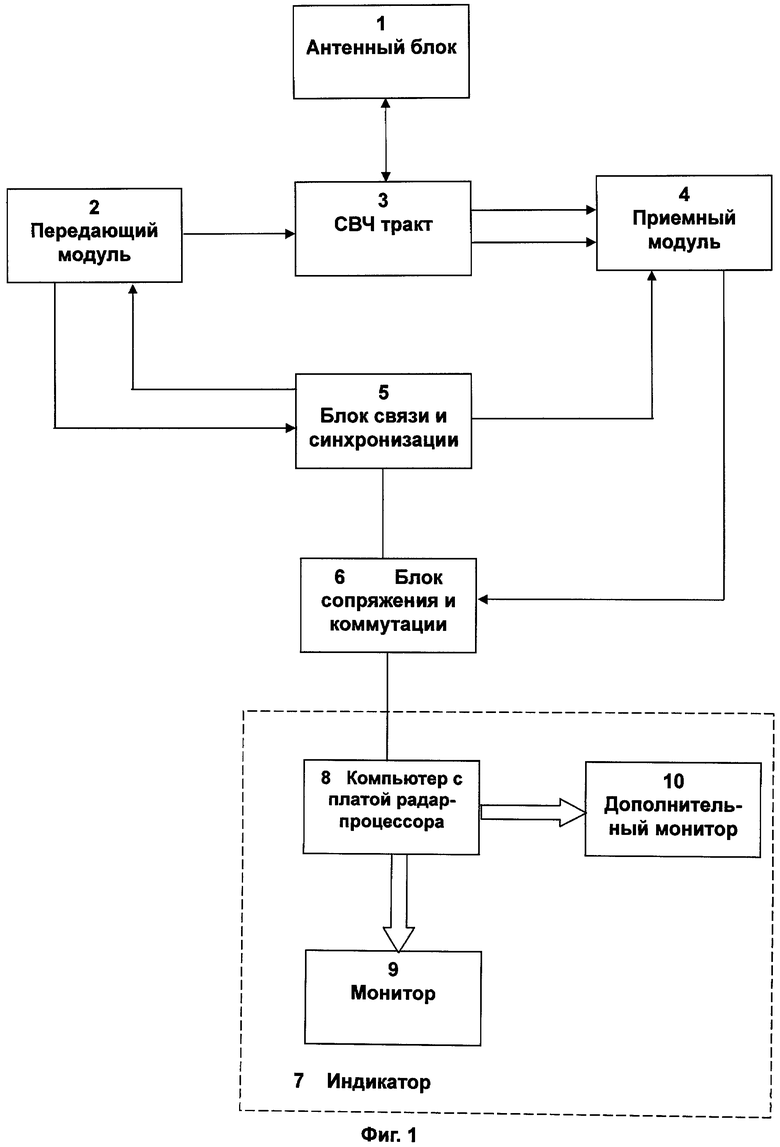
1. Способ создания локационного изображения, заключающийся в циклическом облучении исследуемого пространства, выделении в его пределах элементов пространственного разрешения, приеме сигналов, отраженных от объектов локации в соответствующих элементах разрешения, и формировании локационного изображения, отличающийся тем, что для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства определяют статистические характеристики отраженных сигналов и формируют локационное изображение, яркость элементов которого определяется значением соответствующей статистической характеристики отраженных сигналов или результатом функционального преобразования одной или нескольких статистических характеристик отраженных сигналов.
2. Способ создания локационного изображения по п.1, отличающийся тем, что определяемыми статистическими характеристиками отраженных сигналов являются средний уровень их отражений и дисперсия, при этом яркость формируемого локационного изображения определяется результатом перемножения статистических значений среднего уровня отражений отраженных сигналов на их дисперсию.
3. Способ создания локационного изображения по п.1, отличающийся тем, что определяемыми статистическими характеристиками отраженных сигналов для каждого элемента разрешения за определенное количество циклов обзора исследуемого пространства являются средний уровень и дисперсия сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществляют одновременное функциональное преобразование статистических характеристик отраженных сигналов, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов, и выполняют формирование локационного изображения, яркость элементов которого определяется результатом функционального преобразования статистических характеристик отраженных сигналов в соответствующих элементах разрешения, и на котором контраст целей, средний уровень отражений от которых превышает средний уровень отражений от окружающего фона, определяется по формуле
K1=(E1D1)/(ЕфDф),
где K1 - контраст локационного изображения цели;
Е1, Еф - средние уровни отражений от цели и от фона соответственно;
D1, Dф - дисперсии отражений от цели и от фона соответственно.
4. Способ создания локационного изображения по п.1, отличающийся тем, что определяемыми статистическими характеристиками отраженных сигналов для каждого элемента разрешения за определенное количество циклов обзора исследуемого пространства являются средний уровень и дисперсия сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществляют одновременное функциональное преобразование статистических характеристик отраженных сигналов, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов, и выполняют формирование локационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования в соответствующих элементах разрешения, и на котором контраст целей (типа аномалий), средний уровень отражений от которых меньше среднего уровня отражений от окружающего фона, определяется по формуле
K2=(ЕфDф)/(E2D2),
где K2 - контраст локационного изображения цели;
Еф, Е2 - средние уровни отражений от фона и от цели соответственно;
Dф, D2 - дисперсии отражений от фона и от цели соответственно.
5. Устройство для создания локационного изображения, содержащее соединенные линиями связи антенный блок с возможностью циклического обзора исследуемого пространства, коммутатор, передающий и приемный модули, блок связи и синхронизации и индикатор с компьютером и монитором с возможностью формирования локационного изображения, отличающееся тем, что выполнено с возможностью циклического облучения исследуемого пространства, выделения в его пределах элементов пространственного разрешения, приема сигналов, отраженных от объектов локации в соответствующих элементах разрешения и формирования локационного изображения путем определения для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства статистических характеристик отраженных сигналов и формирования радиолокационного изображения, яркость элементов которого определяется значением соответствующей статистической характеристики отраженных сигналов или результатом функционального преобразования одной или нескольких статистических характеристик отраженных сигналов, при этом устройство содержит последовательно соединенные линиями связи аналого-цифровой преобразователь, блок стробирования, блок накопления, вычислитель, блок выбора характеристик и блок функционального преобразования, а также блок управления, при этом вход аналого-цифрового преобразователя подключен к выходу видеоусилителя приемного модуля, а выход блока функционального преобразования - к входу индикатора, запускающий вход аналого-цифрового преобразователя, входы синхронизации блока стробирования и индикатора соединены с выходом блока связи и синхронизации, сигналы с блока управления поступают в блок связи и синхронизации, а также на управляющие входы блока накопления, вычислителя, блока выбора характеристик и блока функционального преобразования.
6. Устройство для создания локационного изображения по п.5, отличающееся тем, что содержит присоединенный к компьютеру дополнительный монитор с возможностью отображения на нем радиолокационного изображения, яркость элементов которого определяется значением соответствующей характеристики закона распределения отраженных сигналов или результатом ее функционального преобразования либо результатом одновременного совместного функционального преобразования нескольких из указанных характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения.
7. Устройство для создания локационного изображения, содержащее соединенные линиями связи антенный блок с возможностью циклического обзора исследуемого пространства, СВЧ тракт, передающий и приемный модули, блок связи и синхронизации и индикатор с компьютером и монитором с возможностью формирования локационного изображения, отличающееся тем, что содержит соединенные линиями связи обеспечивающий возможность циклического обзора исследуемого пространства антенный блок с приводом и вращающимся переходом, соединенный через СВЧ тракт с передающим и приемным модулями, блок связи и синхронизации, получающий синхронизирующие импульсы от передающего модуля и обеспечивающий передачу команд управления и контроля к передатчику и приемнику, а также передачу видеосигналов с выхода приемного модуля через блок сопряжения и коммутации на индикатор, включающий средства обработки отраженных сигналов - компьютер с платой радар-процессора и монитор с возможностью формирования локационного изображения, при этом средства обработки отраженных сигналов и монитор выполнены с возможностью функционального преобразования характеристик отраженных сигналов путем вычисления за установленное количество циклов обзора исследуемого пространства (оборотов антенны) для каждого элемента пространственного разрешения статистических характеристик закона распределения уровня отраженных сигналов, например среднего значения, дисперсии, коэффициента асимметрии, эксцесса; функционального преобразования отдельных характеристик или одновременного совместного функционального преобразования нескольких из указанных статистических характеристик отраженных сигналов, например перемножения среднего уровня и дисперсии отраженных сигналов; а также формирования на мониторе (последовательно с первичным изображением) или его части (параллельно с первичным изображением) радиолокационного изображения, яркость элементов которого определяется значением соответствующей характеристики или результатом ее функционального преобразования, либо результатом одновременного совместного функционального преобразования нескольких из указанных статистических характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения.
8. Устройство для создания локационного изображения по п.7, отличающееся тем, что средство обработки отраженных сигналов и монитор выполнены с возможностью определения для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства среднего уровня и дисперсии сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществления одновременного функционального преобразования статистических характеристик отраженных сигналов, заключающегося в перемножении среднего уровня и дисперсии отраженных сигналов, и формирования локационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования для соответствующих элементов разрешения, и на котором контраст целей, средний уровень отражений от которых превышает средний уровень отражений от окружающего фона, определяется по формуле
K1=(E1D1)/(ЕфDф),
где K1 - контраст локационного изображения цели;
Е1, Еф - средние уровни отражений от цели и от фона соответственно;
D1, Dф - дисперсии отражений от цели и от фона соответственно.
9. Устройство для создания локационного изображения по п.7, отличающееся тем, что средство обработки отраженных сигналов и монитор выполнены с возможностью определения для каждого элемента разрешения за установленное определенное количество циклов обзора исследуемого пространства среднего уровня и дисперсии сигналов, отраженных объектами локации в соответствующем элементе разрешения, осуществления одновременного функционального преобразования статистических характеристик отраженных сигналов, заключающегося в перемножении среднего уровня и дисперсии отраженных сигналов, и формирования радиолокационного изображения, яркость элементов которого определяется результатом указанного функционального преобразования для соответствующих элементов разрешения, и на котором контраст целей, средний уровень отражений от которых меньше среднего уровня отражений от окружающего фона, определяется по формуле
K2=(ЕфDф)/(E2D2),
где K2 - контраст локационного изображения цели;
Еф, Е2 - средние уровни отражений от фона и от цели соответственно;
Dф, D2 - дисперсии отражений от фона и от цели соответственно.
10. Устройство для создания локационного изображения по п.7, отличающееся тем, что СВЧ тракт содержит направленный ответвитель, циркулятор и аттенюатор, при этом вход направленного ответвителя соединен с выходом передающего модуля, а выход направленного ответвителя - с первым плечом циркулятора, второе плечо которого соединено с антенным блоком, а третье - с входом устройства защиты приемника приемного модуля, ответвляющий выход направленного ответвителя через аттенюатор соединен с входом смесителя АПЧ гетеродина приемного модуля.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2155354C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ КОНТУРА МОРСКОГО СУДНА ПО РАДИОЛОКАЦИОННЫМ НАБЛЮДЕНИЯМ | 2005 |
|
RU2308055C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
| US 6044336 А, 28.03.2000 | |||
| DE 10035921 А1, 07.02.2007 | |||
| WO 2004006119 А2, 15.01.2004 | |||
| US 20090135046 А1, 28.05.2009 | |||
| Препарат для борьбы с филлоксерой винограда | 1976 |
|
SU568426A1 |

