Область техники
Настоящее изобретение относится к способу контроля устройства измерения силы, в особенности, к взвешивающему устройству, а также оно относится к устройству измерения силы и модулю измерения силы, работающим в соответствии со способом.
Уровень техники
Для определения силы, действующей на устройство измерения силы, последнее обычно снабжается датчиком силы, элементом передачи силы и измерительным преобразователем. При таком построении входная сила принимается приемником силы и передается посредством элемента передачи силы на измерительный преобразователь. Например, во взвешивающем устройстве входная сила представляется силой веса взвешиваемого объекта. Приемник силы служит для приема входной силы и, как правило, осуществляется в форме измерительной пластины, чаши для взвешивания или платформенных весов. Элемент передачи силы передает силу от приемника силы на измерительный преобразователь и выполняется, например, в виде стержня, рычажного механизма или устройства, поддерживающего груз.
Путь силы от приемника силы через элемент передачи силы к измерительному преобразователю определяет путь прохождения силы. В примере весов путь прохождения силы следует направлению силы тяжести, то есть он проходит сверху вниз.
Измерительный преобразователь является электромеханическим преобразователем, преобразующим входную величину, то есть силу, в соответствующий измеряемый электрический сигнал. Соответственно, во взвешивающем устройстве измерительный преобразователь создает электрический сигнал измерения, соответствующий силе веса, создаваемой взвешиваемым объектом. Этот электрический сигнал измерения обычно передается через блок обработки сигнала на индикаторный блок или на дополнительное устройство обработки, например, на системный контроллер.
Для получения максимально возможной точности измерения важно, чтобы в максимально возможной степени ни одна из сил, передаваемых через элемент передачи силы, не была потеряна при передаче. Потери могут возникать в результате механического короткого замыкания, так называемого шунтирования силы, если часть силы, которая должна быть передана, ответвляется через паразитные механические соединения. Эти части в дальнейшем не будут приняты датчиком силы, из-за чего в результате могут возникнуть значительные погрешности измерения.
Шунтирование силы возникает, если движущиеся части элемента передачи силы входят в контакт с другими объектами или людьми таким образом, что свободное перемещение элемента передачи силы в направлении пути прохождения силы ограничивается. Такой случай имеет место, например, если во время процесса взвешивания движущийся стержень передачи входит в контакт с неподвижным ободком отверстия для прохождения передающего стержня.
Термины "подвижность" и "перемещение" элемента передачи силы отличаются друг от друга тем, что первый относится к механической зависимости между соседствующими частями, тогда как последний относится к изменению в пространственном положении. Например, во взвешивающем устройстве, раскрытом в EP 0254594, подвижность при передаче силы достигается посредством изгибно-крутильных балок. Датчик, который устанавливается на одной из балок, служит для обнаружения внешних возмущений как аномальных ускорений. Однако то, что контролируется, не является подвижностью балки, которая определяется, например, гибкостью ее шарнирных соединений. Скорее последняя рассматривается как заданная, и согласно идеям, содержащимся в EP 0254594, более низкие обнаруживаемые значения ускорения интерпретируются как более низкий уровень возмущений.
Дополнительно, накопления пыли на элементах передачи силы и на неподвижных частях могут приводить к так называемым пылевым мостам. Эти пылевые мосты могут нарастать со временем и, не будучи замеченными, могут приводить к шунтированиям силы и, таким образом, к погрешностям измерения.
Известный уровень техники предлагает множество способов, чтобы избежать шунтирования силы. Например, в весах, раскрытых в DE 10253601, ошибки измерения за счет накоплений пыли в области между неподвижным корпусом и вертикально движущимся элементом передачи силы могут быть предотвращены потоком газа, направленным в сторону от подвижного элемента передачи силы.
Устройство измерения силы раскрывается в патенте США 4804053, где сила передается посредством так называемых штифтов противовеса или самоустанавливающихся распорок. Если они разработаны с соответствующими размерами, то эти самоустанавливающиеся распорки обладают свойством, что они сами устанавливают себя в направлении пути прохождения силы. Например, на станции взвешивания для транспортных средств это свойство самовыравнивания дает тот эффект, что платформенные весы всегда устанавливаются в положение, в котором они могут свободно качаться в поперечном направлении, хотя обычно, когда транспортное средство, которое должно взвешиваться, будет въезжать на платформенные весы, они будут наталкиваться на боковые ограничители. Поскольку элементы передачи силы всегда самоустанавливаются в направлении прохождения силы, не существует возможности возникновения поперечных сил и, следовательно, нет паразитной утечки измеряемой силы.
Упомянутые выше устройства хорошо работают при нормальных условиях, но при трудных рабочих условиях они могут не предотвращать или недостаточно предотвращать возникновение шунтирования силы, например, при нагрузках, которые используют предельные возможности устройства, или в аномальных ситуациях, таких как неправильная установка прибора измерения силы, неправильная работа или чрезмерное накопление грязи. Как следствие, шунтирования силы со связанными с ними погрешностями измерения могут возникать, несмотря на упомянутые выше предупредительные меры.
Задача изобретения
Поэтому задача настоящего изобретения состоит в том, чтобы предложить способ контроля состояния устройства измерения силы, конкретно весов, и дополнительно предложить соответствующее устройство измерения силы, посредством которого становятся доступными простая и экономически эффективная концепция конструкции и работы устройства измерения при удовлетворении, в то же самое время жестких требований в отношении точности измерения и стабильности.
Эта задача решается способом, устройством измерения силы и модулем измерения силы, обладающими признаками, приведенными в независимых пунктах формулы изобретения. Предпочтительно разработанные варианты осуществления изобретения представлены в дополнительных, зависимых пунктах формулы изобретения.
Сущность изобретения
Изобретение касается способа и устройства, пригодного для работы в соответствии с упомянутым способом, для контроля состояния устройства измерения силы, конкретно взвешивающего устройства, с подвижным элементом передачи силы, через который сила, действующая на устройство измерения силы, передается на измерительный преобразователь, создающий сигнал измерения, соответствующий приложенной силе, после чего сигнал преобразуется в форму для индикации на дисплее или передается для дальнейшей обработки. В способе и устройстве, соответствующих изобретению, определяется, по меньшей мере, один параметр, характеризующий свободную подвижность элемента передачи силы или изменение в свободной подвижности во времени. Параметр, который служит для обнаружения, существует ли в элементе передачи силы нормальное состояние свободной подвижности или ограничение свободы, затем сравнивается, по меньшей мере, с одним пороговым значением и на основе результата сравнения, то есть в случае, когда обнаружено ограничение свободной подвижности, приводится в действие устройство измерения силы. Это открывает возможность, в частности, того, что в трудных условиях работы ограничение свободной подвижности элемента передачи силы может быть обнаружено, передано и представлено вниманию пользователя в простой манере. Дополнительно, затраты и усилия, требующиеся для выполнения отнимающей много времени физической проверки свободной подвижности на регулярной основе, могут быть сокращены или даже полностью исключены. Соответственно, существуют преимущества в отношении точности измерения и стабильности устройства измерения силы. Дополнительно, погрешности и повреждения, вызванные износом, могут быть более точно идентифицированы, и работы по техническому обслуживанию и ремонту могут быть лучше спланированы и выполняться более эффективно. В некоторых случаях могут иметь место дополнительные преимущества, являющиеся результатом, например, соответственно адаптированных требований к среде чистой комнаты, в которой находится устройство измерения силы. Изобретение, таким образом, приводит к простой и экономически эффективной конструкции и работе устройства измерения силы.
Предпочтительно, подвижность элемента передачи силы определяется с помощью соответствующего датчика подвижности, который с одной стороны механически соединяется с элементом передачи силы и с другой стороны электрически соединяется с компаратором. Термин "датчик подвижности", как он используется здесь, предназначен охватывать все виды измерительных устройств, пригодных для измерения подвижности или изменения подвижности элемента передачи силы. Таким образом, могут измеряться поступательные, а также вращательные или зависимые от угла перемещения. Соответственно, параметр может характеризовать поступательное, вращательное или зависимое от угла перемещение элемента передачи силы.
Датчик подвижности может быть основан на различных принципах измерения и на практике может быть сконструирован в различных формах. Подвижность может быть определена, например, посредством измерения скорости, составляющей скорости, смещения и/или угла с последовательным вычислением производной по времени, результата измерения ускорения или составляющей ускорения.
Как дополнительная возможность, датчик подвижности может быть основан на измерении момента инерции или на принципе измерения направления силы, которая действует на датчик подвижности, конкретно, силы тяжести. Как пример, подвижность может быть определена по результату измерения положения отклонения маятника или жидкости.
После того, как параметр был определен, он сравнивается компаратором, по меньшей мере, с одним пороговым значением. Одно или более пороговых значений могут быть сохранены в компараторе или могут быть получены от дополнительного блока, например, от блока запоминающего устройства или процессора. Пороговые значения могут быть взяты от регулирующих норм, таких как национальные или международные стандарты, они могут быть определены сравнительными измерениями или они могли быть заранее определены изготовителем устройства измерения силы.
Изобретение имеет особое преимущество в устройствах измерения силы, которые используются в средах с трудными условиями работы, когда имеется высокий риск незамеченного шунтирования силы, например, из-за наклонного положения, неустойчивой установки или изменения положения устройства измерения силы, в пыльной атмосфере, при накоплении тяжелой грязи на взвешивающем устройстве или из-за недопустимого контакта с подвижными частями, особенно, с поддоном для взвешивания, с предметами или людьми. Контроль в соответствии с изобретением особенно выгоден, если опасность шунтирования силы является только временной, когда она едва может быть обнаружена при физической проверке.
Большие преимущества дополнительно получаются при применениях на открытом воздухе, например, во взвешивающих системах для транспортных средств, потому что взвешивающее устройство в этом случае может подвергаться воздействию факторов окружающей среды, таких как изменения температуры или накопления грязи, льда и снега. Кроме того, эти факторы воздействия окружающей среды могут сильно изменяться за очень короткое время, так что существует повышенная опасность, что шунтирование силы может пройти незамеченным или может быть замечено слишком поздно. С помощью способа, соответствующего изобретению, однако, шунтирование силы может быть обнаружено на ранней стадии и эффективным путем.
При самоустанавливающихся распорках ухудшение во времени может происходить в результате износа контактных поверхностей. Самоустанавливающиеся распорки в этом случае больше не будут способны правильно выравниваться сами, так чтобы поперечные силы и, таким образом, шунтирования силы, могли устанавливаться сами. Эти эффекты износа также могут быть поставлены под контроль с помощью способа и устройства, соответствующих изобретению.
Дополнительно, самоустанавливающиеся распорки могут компенсировать поперечные силы только до определенного предела, то есть до точки, где датчик силы встречается с боковыми ограничительными бамперами, где шунтирование силы будет происходить, несмотря на самоустанавливающиеся распорки. Эти ситуации могут быть достоверно обнаружены с помощью способа и устройства, соответствующих изобретению, без необходимости в непрерывной физической проверке устройства измерения силы.
Способ, соответствующий изобретению, может также использоваться для широкого разнообразия различных устройств измерения силы, измерительные преобразователи которых могут быть основаны на множестве принципов, например, на измерении с тензодатчиками, с емкостными, индуктивными или пьезоэлектрическими чувствительными элементами или на измерении силы компенсации в устройствах измерения силы компенсации.
Варианты осуществления изобретения
В предпочтительном варианте осуществления изобретения величина, которая характеризуется параметром, является, по существу, поступательной скоростью и/или угловой скоростью и/или поступательным ускорением и/или угловым ускорением и/или кинетической энергией, в частности, энергией углового перемещения элемента передачи силы. Предпочтительно, датчик подвижности разрабатывается таким образом, чтобы напрямую измерять интересующие величины, поскольку это позволяет снизить сигнал датчика подвижности для получения значащих данных на возможно раннем этапе. Передачи менее важных данных, например, угла наклона или абсолютного положения элемента передачи силы, можно в этом случае избежать. Дополнительно, параметр, который характеризует подвижность, может быть также определен из статистической оценки сигнала датчика подвижности, например, из дисперсии измеренного сигнала.
В предпочтительном варианте осуществления изобретения подвижность, характеризуемая параметром, является подвижностью, по меньшей мере, в одном направлении, которое, по существу, ортогонально к направлению пути прохождения силы в элементе передачи силы. Предпочтительно, датчик подвижности конструируется таким образом, чтобы измерять подвижность в этом направлении. При таком ограничении функциональности возможна более простая и экономически эффективная конструкция датчика подвижности.
Дополнительный предпочтительный вариант осуществления содержит признак, что пороговое значение устанавливается заранее и/или устройство измерения силы приводится в действие в случае, если пороговое значение либо не достигнуто, либо превышено, либо пересекается в направлении убывания. Это гарантирует, что данный критерий всегда выполняется, например, что элемент передачи силы всегда имеет минимальный объем подвижности. При соответствующем выборе порогового значения может, таким образом, в значительной степени быть исключена опасность того, что шунтирование силы произойдет незамеченным.
В дополнительном варианте осуществления изобретения сигнал измерения измерительного преобразователя, конкретно сигнал, индицирующий обнаружение изменения приложенной силы, используется для определения временного интервала, в течение которого параметр измеряется и/или сравнивается с пороговым значением. Это позволяет определить причину и следствие перемещений элемента передачи силы и использовать их для достоверной оценки сигналов датчика подвижности. Дополнительно, определяя временной интервал, определение параметра может поддерживаться в рамках определенных пределов и быть сосредоточенным, делая возможным эффективный сбор и анализ данных.
В дополнительном варианте осуществления изобретения действие состоит из выдачи предупреждения и/или тревоги и/или приостановки отображения и/или передачи сигнала (SF) измерения и значений результатов измерений, создаваемых из сигнала. Таким образом, пользователь предупреждается об опасности ошибочных измерений, и/или не допускается использование результатов ошибочных измерений.
В соответствии с дополнительным предпочтительным вариантом осуществления изобретения, элемент передачи силы содержит подвижный приемник силы и стержень или деформируемое тело, в частности, самоустанавливающуюся распорку. В этой конфигурации способ, соответствующий изобретению, доказывает свою особую предпочтительность, поскольку этот тип устройств измерения силы часто используется в трудных рабочих условиях.
В дополнительном примере варианта осуществления подвижность элемента передачи силы определяется относительно заданных прямоугольных координат или заданных сферических координат, и параметр определяется, основываясь на подвижности или изменении подвижности, определяемых относительно заданной системы координат. При этой концепции может быть достигнута высокая степень точности измерений, поскольку пространственное направление перемещения, которое особенно хорошо подходит для описания подвижности, может быть определено более точно, основываясь на центре вращения, который является известным элементом конструкции. Поскольку свобода перемещения системы известна, процесс может быть сильно упрощен с помощью преобразования координат.
Например, если подвижность принимается в качестве эталона в сферической системе координат, в которой, по меньшей мере, одна координата является эталонной при отсчете по вертикали, то мгновенный угол θ наклона элемента передачи силы может быть легко вычислен. Угол θ наклона является в этом случае углом между мгновенным направлением элемента передачи силы и вертикальным направлением, в котором последнее определяется силой тяжести. При определении подвижности относительно этих координат поэтому становится возможным строить точный и надежный датчик динамического наклона элемента передачи силы и/или модуля измерения силы.
Основываясь на мгновенном угле θ наклона, угловая скорость Vθ может быть вычислена как производная по времени. Кроме того, аналогично дисперсии сигнала, удельная угловая энергия Eθ, связанная с углом θ наклона, особенно хорошо подходит для использования в качестве параметра М для того, чтобы характеризовать перемещение элемента передачи силы. Удельная угловая энергия Eθ в этом случае пропорциональна квадрату угловой скорости Vθ:
Eθ~Vθ 2.
Преобразование координат компонент сигнала узлов может быть осуществлено множеством путей, например, как арифметическая программа в микропроцессоре, с помощью аналоговой схемы или в форме коммерчески доступных заранее собранных арифметических модулей. Кроме того, операции, такие как дифференцирование, используемое для определения угловой скорости наклона, или возведение в квадрат, используемое для вычисления удельной угловой энергии, также могут выполняться с помощью преобразований. Наконец, вышеупомянутые операции могут также вводиться непосредственно в обработку сигнала датчика подвижности, так чтобы выходной сигнал датчика подвижности был доступен напрямую в форме параметра, чтобы характеризовать перемещение элемента передачи силы и/или модуля измерения силы.
Конечно, то, что было сказано выше об обработке сигналов датчика, не ограничивается зависящими от угла перемещениями элемента передачи силы, а может также быть непосредственно применено к поступательным перемещениям, таким как поступательная скорость и/или поступательное ускорение и/или поступательная кинетическая энергия элемента передачи силы и/или модуля измерения силы.
Вместо вычисления удельной угловой энергии Еθ как параметра М, чтобы характеризовать перемещение элемента передачи силы и/или модуля измерения силы, также возможно, в качестве приближения, вычислить удельную энергию
E*~(Vx)2+(Vy)2,
основываясь на сумме квадратов составляющей Vx скорости в направлении по оси х и составляющей Vy скорости в направлении по оси Y.
В дополнительном предпочтительном варианте осуществления перемещение элемента передачи силы, по меньшей мере, в одном направлении измеряется датчиком подвижности, и это измерение, по меньшей мере, в одном направлении затем арифметически преобразуется, например, посредством преобразования координат в соответствии с пространственной ориентацией датчика подвижности в дополнительном направлении перемещения, основываясь на котором определяется параметр М.
Датчик подвижности предпочтительно конструируется так, чтобы быть чувствительным к направлению, по меньшей мере, в одном заданном направлении. Через арифметическое преобразование или преобразование координат возможно, даже без конкретной пространственной ориентации датчика подвижности, адаптировать результат измерения направления перемещения простым способом в дополнительное направление перемещения, например, в направление фактической пространственной подвижности элемента передачи силы.
Преобразование координат предпочтительно определяется через заданные параметры конфигурации, основанные на ориентации датчика подвижности в его установленном состоянии. Это имеет то преимущество, что преобразование может быть адаптировано к любой ориентации установленного датчика подвижности в пространстве или на плоскости через простую адаптацию параметров конфигурации. Соответственно, подвижность элемента передачи силы, например, в направлении, ортогональном направлению пути прохождения силы, может быть определена без большой регулировки датчика подвижности.
В дополнительном варианте осуществления изобретения датчик подвижности жестко связывается с элементом передачи силы. Это позволяет обнаруживать перемещение элемента передачи силы непосредственно и с высокой степенью точности.
В дополнительном варианте осуществления изобретения устройство измерения силы выполнено как модульная система, по меньшей мере, с двумя модулями измерения силы, каждый из которых содержит измерительный преобразователь. При такой концепции сигналы измерения индивидуальных модулей измерения силы могут коррелироваться друг с другом, что предлагает особенно простой способ определения местоположения источников погрешности. Каждый модуль измерения силы предпочтительно содержит датчик подвижности. Однако датчик подвижности может также иметь прямое соединение с приемником силы, в частности, с платформенными весами, и, кроме того, сигналы измерения модулей измерения силы могут также использоваться при обработке сигналов датчика подвижности.
В дополнительном варианте осуществления изобретения модуль измерения силы имеет корпус, который защищает измерительный преобразователь, и датчик подвижности устанавливается в корпусе или на корпусе. При такой конструкции датчик подвижности в значительной степени изолирован от компонент, участвующих в измерении силы, в частности, от измерительного преобразователя и деформируемого тела. Следовательно, возможно избежать вероятности, что два, по существу, независимых измерения повлияют друг на друга.
Описание чертежей
Подробности устройства измерения силы, модуля измерения силы и способа, соответствующих изобретению, представлены в последующем описании примеров вариантов осуществления, которые поясняются в чертежах, на которых:
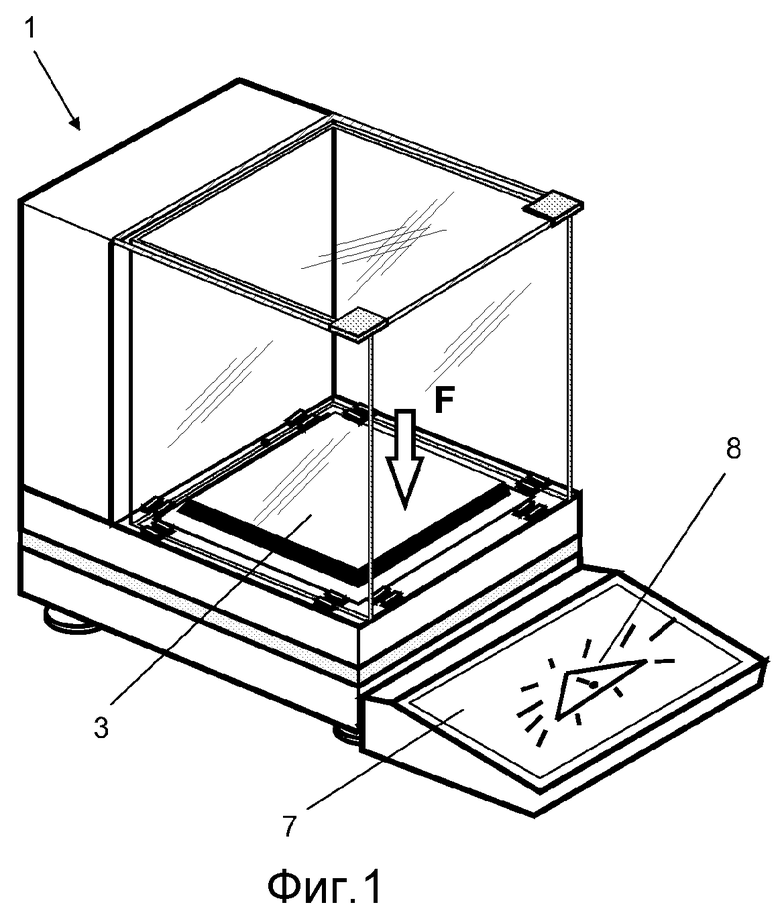
фиг.1 - устройство 1 измерения силы, соответствующее изобретению, в форме весов примерной конфигурации с символически указанной входной силой F, приемником 3 силы и индикаторным блоком 7, отображающим предупредительную надпись 8;
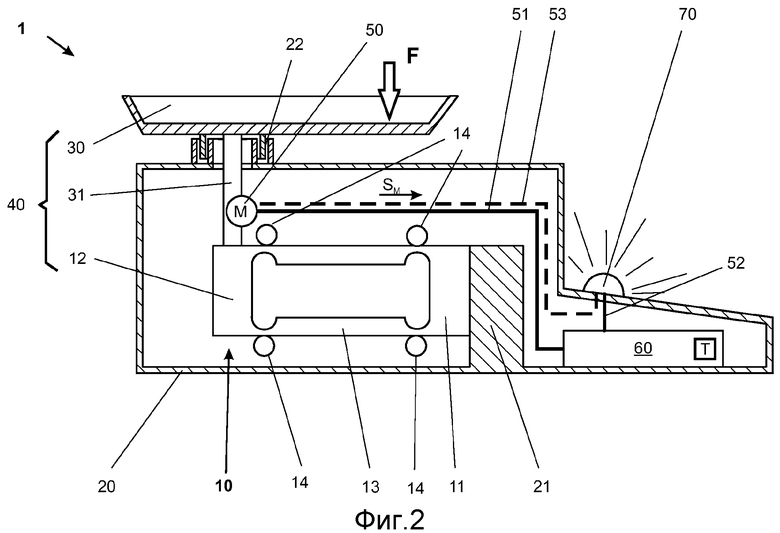
фиг.2 - схематичный упрощенный вид весов в разрезе с элементом 40 передачи силы и датчиком 50 подвижности 50, который соединяется с компаратором 60, от которого выходное значение передается на индикаторный блок 70;
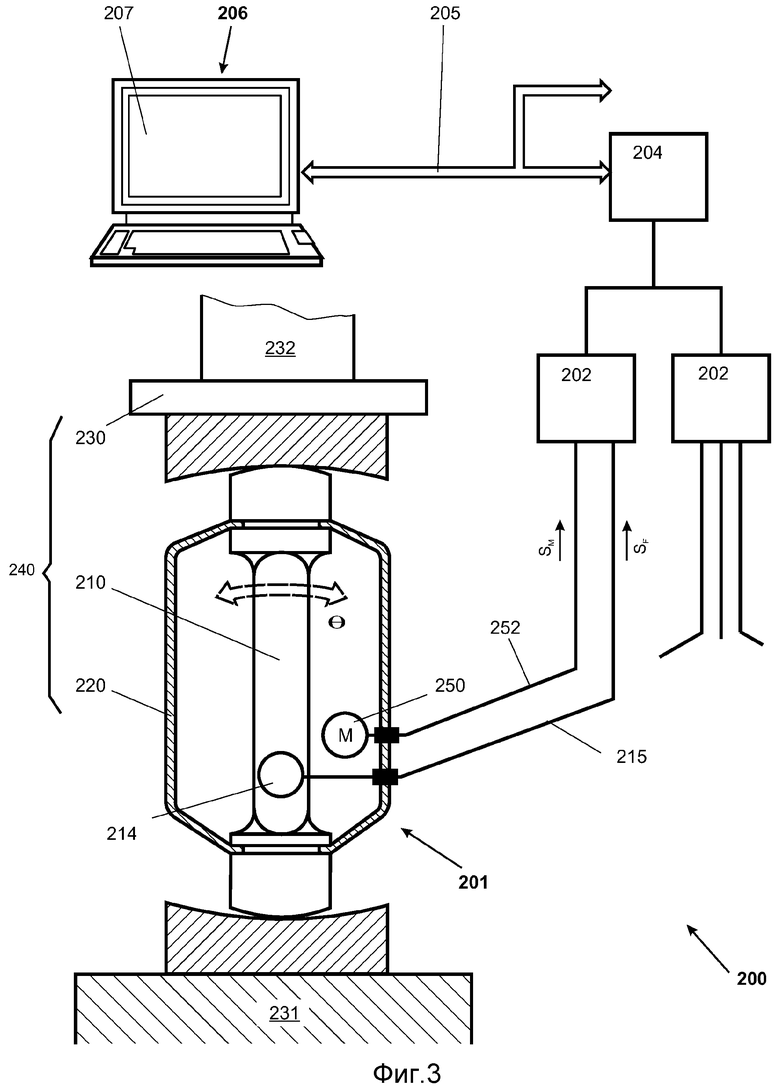
фиг.3 - схематический вид устройства 200 измерения силы взвешивающего устройства в форме резервуара с подвижным модулем 201 измерения силы, показанным в разрезе, снабженного датчиком 250 подвижности, пригодного для выполнения способа в соответствии с изобретением и соединяющегося с компьютерным блоком 206 посредством соединительной линии 252;
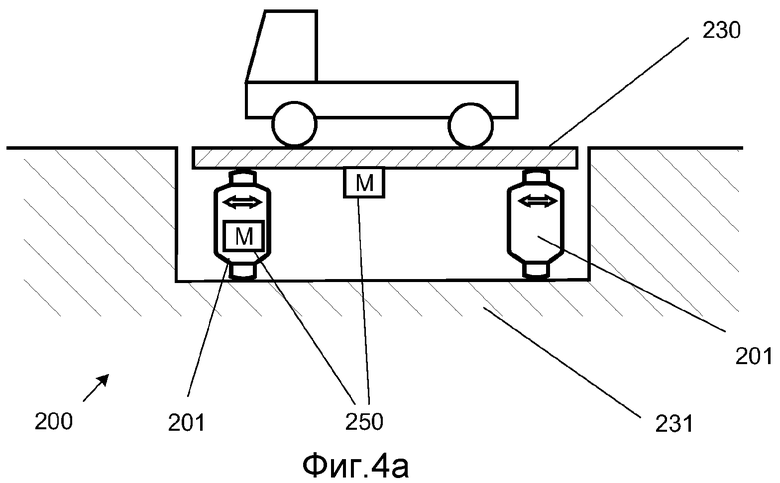
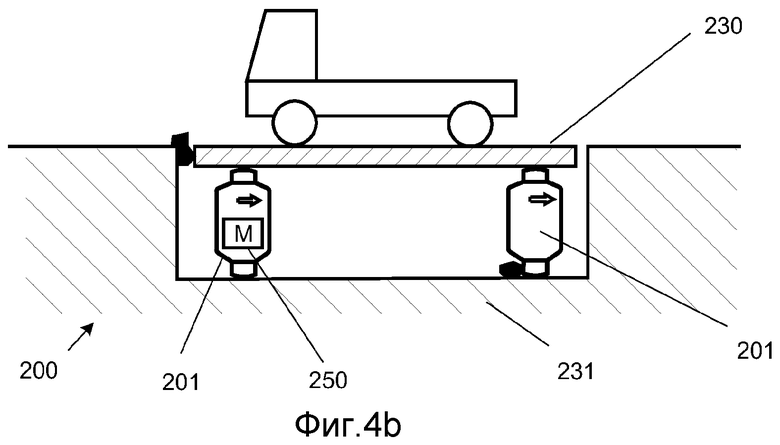
фиг.4a-4c - дополнительные схематические виды устройства 200 измерения силы, показанного на фиг.3, служащего для определения веса транспортных средств, в котором, по меньшей мере, один из модулей 201 измерения силы снабжен датчиком 250 подвижности и в котором на фиг.4a показан дополнительный датчик 250 подвижности, прикрепленный к платформенным весам 230, на фиг.4b показаны накопления грязи между подвижной и неподвижной частями шкалы, и на фиг.4c показано направленное вниз смещение устройства 200 измерения силы на угол α.
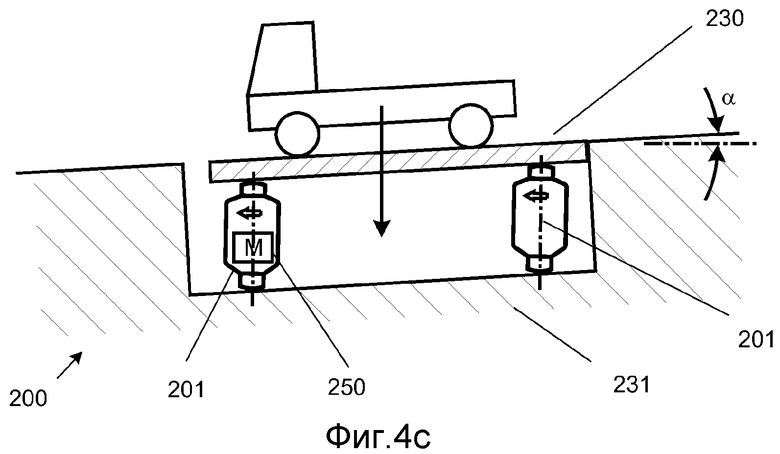
фиг.5a и 5b - схематические виды модуля 201 измерения силы, соответствующего фиг.3, в котором датчик 250 подвижности имеет форму интегральной схемы, показанной на фиг.5a сбоку в разрезе и на фиг.5b в плоскости сечения, определенной линией A-A на фиг.5a; и
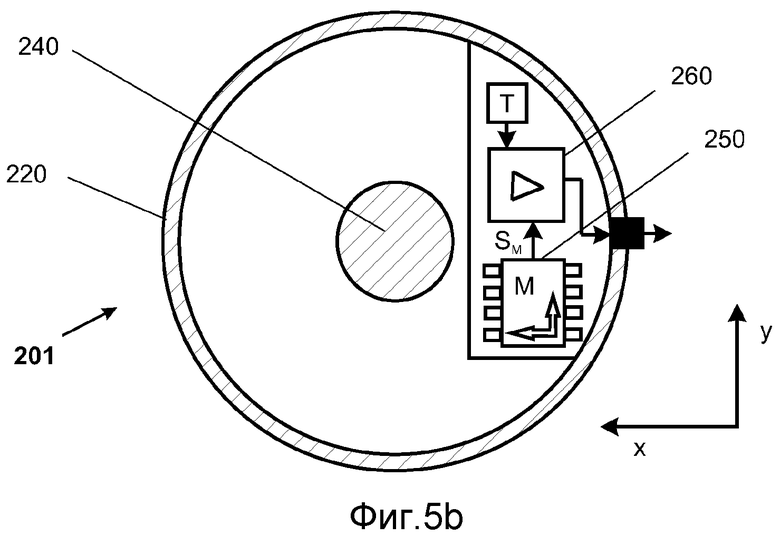
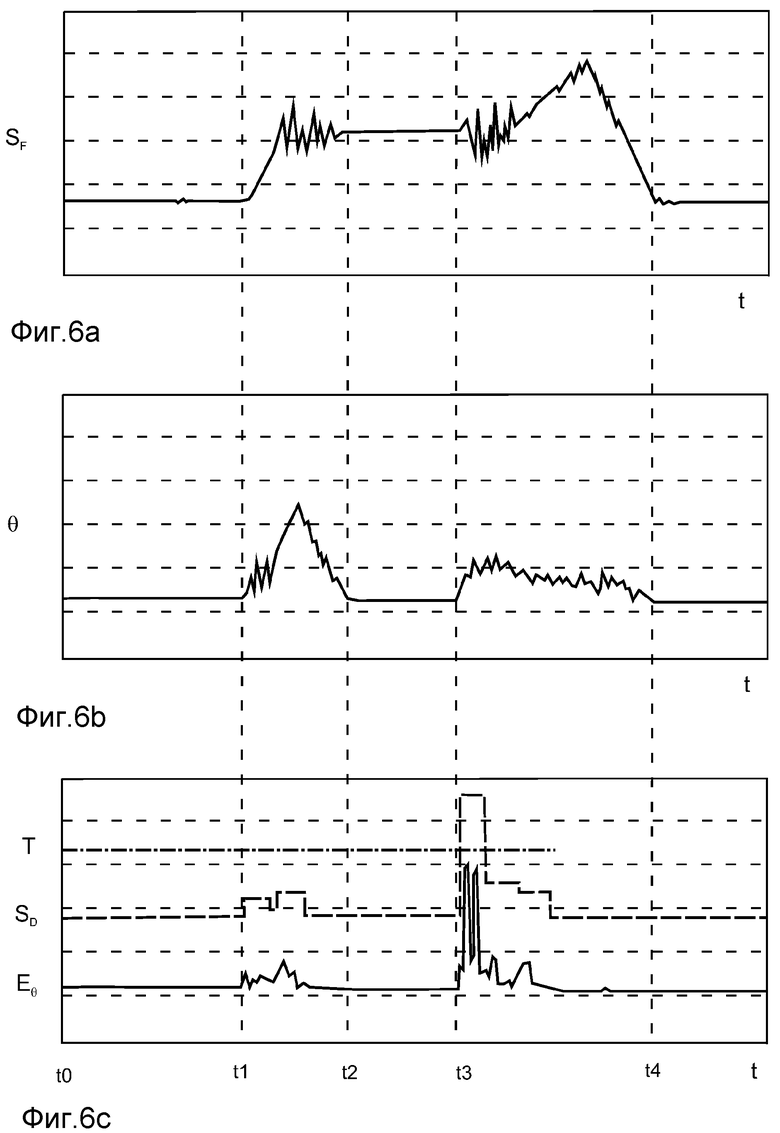
фиг.6a-6c - графики зависимости сигналов измерения веса от времени с помощью модуля 201 измерения силы, соответствующего фиг.5, на которых фиг.6a - сигнал SF измерения при измерении веса и фиг.6a и 6b - соответствующие сигналы датчика подвижности, выраженные в терминах угла θ наклона и удельной угловой энергии Eθ.
Подробное описание чертежей
На фиг.1 представлено устройство 1 измерения силы, соответствующее изобретению, в форме весов примерной конфигурации с символически обозначенной входной силой F, действующий на приемник 3 силы в форме измерительной пластины или взвешивающего поддона. Состояние устройства 1 измерения силы контролируется способом и устройством, соответствующими изобретению, и помеховые факторы, которые могут вызывать ошибки в результате взвешивания, сообщаются пользователю посредством индикаторного блока 7, например, с помощью предупредительной надписи 8, появляющейся на жидкокристаллическом дисплее.
На фиг.2 схематично представлен упрощенный вид устройства 1 измерения силы в форме весов с камерой 10 измерения силы, показанной в поперечном сечении. Камера 10 измерения силы имеет неподвижную часть 11 и подвижную часть 12, соединенные друг с другом через промежуточную часть 13. Перемещения подвижной части 12 принимаются четырьмя измерительными преобразователями 14 и преобразуются в сигнал измерения, соответствующий входной силе F. Этот сигнал измерения затем передается, прямо или через этап обработки сигнала, на индикаторный блок 70 или на устройство дополнительной обработки.
Камера 10 измерения силы устанавливается во внутреннем пространстве корпуса 20 и ее неподвижная часть жестко соединяется с корпусом 20 через опору 21, расположенную на корпусе. Приемник 30 силы в форме взвешивающего поддона, который устанавливается вне корпуса 20, соединяется стержнем 31 с принимающей силу частью 12 камеры 10, измеряющей силу, которая установлена во внутреннем пространстве. Стержень 31 проходит через корпус 20, не касаясь последнего, с помощью проходного отверстия 22. Проходное отверстие 22 выполнено с возможностью избежать или, по меньшей мере, сильно снизить риск попадания грязи в корпус. Приемник 30 силы, стержень 31 и подвижная часть 12 камеры 10 измерения силы являются частями подвижного элемента 40 передачи силы устройства 1 измерения силы.
Датчик 50 подвижности устанавливается на подвижном элементе 40 передачи силы, в данном случае - на стержне 31, чтобы контролировать параметр М, характеризующий подвижность элемента передачи силы. В этом примере определяемым параметром является скоростью стержня 31 в горизонтальном направлении. Однако, параметр М может также быть ускорением или кинетической энергией элемента 40 передачи силы. Сигнал SM датчика 50 подвижности, соответствующий параметру М, который был определен, посылается для дополнительной обработки через первую соединительную линию 51 на устройство обработки сигнала, содержащее компаратор 60. Однако, датчик 50 подвижности может также быть установлен на приемнике 30 силы или на камере 10 измерения силы.
Компаратор 60 соединяется через вторую соединительную линию 52 с индикаторным блоком 70, в данном случае - светодиодом, и передает выходные сигналы, создаваемые компаратором 60, на индикаторный блок 70. Однако компаратор 60 может также быть интегрирован в датчик 50 подвижности. Выходные сигналы, создаваемые компаратором 60, могут в данном случае быть посланы непосредственно на индикаторный блок 70 посредством третьей соединительной линии 53 (обозначена пунктирной линией).
Как только параметр М, в данном примере - кинетическая энергия стержня 31, становится меньше или падает ниже заданного минимального порогового значения T, компаратор 60 включает в действие весы. В этой схеме компаратор 60 может также быть встроен непосредственно в электронные устройства измерения и/или обработки, которые обрабатывают сигналы измерительных преобразователей 14. Компаратор 60 может дополнительно быть выполнен как цифровой арифметический блок, перед которым на пути обработки установлен аналого-цифровой преобразователь.
Индикаторный блок 70 может быть установлен либо непосредственно на наружной стороне корпуса 20, либо в месте, отдельном от корпуса 20, или он может также быть установлен внутри корпуса 20, если последний является прозрачным и/или проницаемым для звука, так чтобы указание могло оставаться видимым или слышимым. Символы и тревоги, которые конкретно подгоняются под выдаваемое сообщение или предупреждение, могут увеличить влияние на человека. Таким образом, можно себе представить использование общеизвестных пиктограмм, таких как, например, знаки или символы трафика, конкретно созданные для целевого предупреждения. Используя различные частоты вспышки для визуальной индикации или используя разные уровни громкости и высоты звука для звуковой индикации, возможно сигнализировать о степени важности предупреждения или сообщения. Каждая из соединительных линий 51, 52, 53 в варианте осуществления, показанном на фиг.2, может быть либо кабельным соединением, таким как сигнальный кабель, система шин и т.п., либо беспроводным соединением.
В этом примере минимальное допустимое пороговое значение T заранее определяется для параметра М и, таким образом, для кинетической энергии стержня 31. Если этот минимальный порог не достигается при типичном изменении нагрузки, низкий уровень кинетической энергии может интерпретироваться как индикация, что свобода перемещения элемента 40 передачи силы ограничивается. Как следствие, компаратор 60 вводит в действие соответствующую операцию весов, например, индикацию предупреждающего сообщения 8 для пользователя.
В случае, когда параметр не доходит, превышает, или меньше заданного порогового значения T, и вскоре предстоит измерение входной силы, одна из операций весов может состоять в повторном измерении, которое вызывается тем фактом, что весы интерпретируют значение измерения как неустойчивое или попадающее значительно ниже или выше диапазона взвешивания. Измерение может быть также повторено не один раз, по меньшей мере, сверх определенного допустимого временного интервала, но только до тех пор, пока измеренная кинетическая энергия не увеличилась до значения, превышающего пороговое значение T. Если упомянутый выше допустимый временной интервал превышается, или измеренное значение параметра М продолжает оставаться слишком низким, процесс измерения может быть прерван и/или заблокирован и/или индикация готовности может выключиться. В качестве следующего этапа значение измеренной кинетической энергии вместе с временной отметкой запоминается в файле журнала регистрации в блоке обработки сигнала, конкретно в блоке запоминающего устройства, находящемся в блоке обработки сигнала. Это обеспечивает прослеживаемость.
В качестве дополнительной операции весов, конкретно их блока обработки сигнала, сигнал SM датчика 50 подвижности или выходной сигнал компаратора 60 может быть послан на индикаторный блок 70, где может отображаться соответствующая индикация. Кроме того, индикаторный блок 70 может выдавать акустическую тревогу или оптическое предупреждение, такое как мигающий свет, или дисплей может показывать предупреждающее сообщение, информацию или инструкции по поиску неисправностей.
На фиг.3 представлено устройство 200 измерения силы в виде резервуарного взвешивающего устройства с подвижным модулем 201 измерения силы в разрезе, которое контролируется в соответствии со способом, соответствующим изобретению. Резервуарные взвешивающие устройства используются, в частности, в промышленных установках для взвешивания содержимого накопителей, резервуаров, сосудов реактора и т.п. Обычно для каждого контейнера, который должен взвешиваться, используются несколько подвижных модулей 201 измерения силы. Они устанавливаются под ножкой 232 контейнера или под приемником силы 230, поддерживающим ножку контейнера, и, в свою очередь, поддерживаются основанием 231. Таким образом, каждая ножка 232 контейнера опирается на подвижный модуль 201 измерения силы. Чтобы измерить вес контейнера и/или его содержимого, сигналы SF измерения, создаваемые модулями 201 измерения силы, должны складываться, поскольку каждый сигнал представляет частичную массу. Модули 201 измерения силы поэтому обычно не имеют своих собственных индикаторных блоков. Сигналы SF измерения индивидуальных модулей 201 измерения силы контейнера передаются, например, к компьютерному блоку 206, который может быть системным регулятором, в котором сигналы обрабатываются и впоследствии представляются обычно как часть сводных данных системы на индикаторном блоке 207, введенном в системный регулятор. Сигналы SF измерения могут быть аналоговыми сигналами, но предпочтительно они имеют форму цифровых сигналов измерения или цифровых значений измерения.
Модуль 201 измерения силы содержит деформируемое тело 210, помещенное в корпус 220. Корпус 220 обычно приваривается к деформируемому телу 210 и герметично уплотняется для защиты от окружающей среды модуля 201 измерения силы. Во время измерения деформируемое тело 210, а также корпус 220 упруго сжимаются. Влияние, которое жесткость корпуса оказывает на сигнал SF измерения, может быть частично компенсировано и гистерезис модуля 201 измерения силы относительно диапазона измерения является пренебрежимо малым.
Датчик 250 подвижности присоединяется к компьютерному блоку 206 посредством соединительной линии 252, передатчика 202, разветвителя 204 и системы 205 шин. Сигнал SF измерения модуля 201 измерения силы может быть передан на компьютерный блок 206 либо посредством этих соединений, либо посредством соединения 215, выделенного специально для сигнала измерения.
Датчик 250 подвижности служит для определения параметра М, который характеризует подвижность элемента 240 передачи силы. Этот параметр М посылается в компьютерный блок 206 в форме сигнала SM датчика 250 подвижности. Элемент 240 передачи силы содержит подвижный элемент 230 приема силы и модуль 201 измерения силы с качалкой на шарнире. Модуль 201 измерения силы, в свою очередь, содержит деформируемое тело 210 с прикрепленным корпусом 220. Датчик 250 подвижности механически соединяется с корпусом 220, так чтобы перемещения модуля 201 измерения силы, представленные пунктирной двойной стрелкой, с углом наклона θ, происходили совместно с датчиком 250 подвижности.
Компьютерный блок 206 является, например, центральным компьютером системы управления технологическим процессом. В зависимости от конфигурации устройства 200 измерения силы и компьютерного блока 206 датчик 250 подвижности автоматически передает сигналы SM датчика 250 подвижности на компьютерный блок непрерывно или с периодическими и/или случайными интервалами или после возникновения изменения. Конечно, компьютерный блок 206 также может запрашивать сигналы от датчика подвижности непрерывно, периодически или на случайной основе. Поскольку на контейнер приходятся несколько модулей 201 измерения силы, сигналы SM каждого датчика 250 подвижности могут быть проверены или подвергнуты испытанию на достоверность путем взаимного сравнения с соответствующими сигналами датчиков подвижности других модулей измерения силы. Однако, заданные значения для проверки могут быть уже запомнены в датчике 250 подвижности или в компьютерном блоке 206. Эти запомненные значения могут основываться на опубликованных таблицах, которые были получены с помощью других измерительных приборов или скомпонованы из данных Интернета. Например, данные, специфические для географического местоположения, в котором находится устройство измерения силы, такие как диапазоны атмосферного давления, температуры и излучения, или данные, относящиеся к сейсмическим колебаниям, легкодоступны и могут использоваться для проверки сигналов SM датчика 250 подвижности. Если часть этих сигналов SM сохраняется во времени в компьютерном блоке 206 в качестве архивных данных, анализ этих архивных данных может служить для получения дополнительных знаний о состоянии модуля 201 измерения силы, а также о состоянии датчика 250 подвижности.
На фиг.4a-4c схематично представлены виды устройства 200 измерения силы 200 для весов транспортного средства, показанных на фиг.3, с несколькими модулями 201 измерения силы. Два модуля измерения силы показаны как представительные примеры большего количества модулей 201 измерения силы, поскольку приемник 230 силы в форме платформенных весов обычно помещается на четырех модулях 210 измерения силы, и устройство 200 измерения силы образуется несколькими платформенными весами. Основание 231 обычно выполнено в виде шахты, заглубленной в землю, так чтобы транспортные средства могли удобно въезжать на платформу и съезжать с нее. В поясняемом примере датчик 250 подвижности устанавливается на одном индивидуальном модуле 201 измерения силы. Для определения подвижности приемника 230 силы может быть достаточным снабдить индивидуальный модуль 201 измерения силы датчиком 250 подвижности. Предпочтительно, однако, если датчиками 250 подвижности будут оснащены несколько модулей 201 измерения силы, чтобы получить более информативные результаты измерения и улучшить возможности точного определения источников ошибок.
На фиг.4a представлен пример, в котором дополнительный датчик 250 подвижности устанавливается в приемнике 230 силы, причем последний выполняется как платформенные весы. Также можно себе представить использование одного единственного датчика 250 подвижности, который устанавливается в приемнике 230 силы. В этом случае, аналогично, подвижность элемента передачи силы и, в частности, подвижность приемника 230 силы могут быть достоверно определены.
Возможный источник ошибок показан на фиг.4b. Здесь показаны два примера, когда грязь накопилась между основанием 231 и подвижными частями, а именно, в приемнике 230 силы и в одном из модулей 201 измерения силы. Каждое из этих накоплений грязи ограничивает свободу перемещения подвижных частей, как символически указано стрелками, которые направлены только в одном направлении. Тот факт, что перемещение происходит только в одном направлении, может быть обнаружен и представлен вниманию пользователя с помощью датчика 250 подвижности и сопутствующих данных обработки сигнала.
На фиг.4c показан дополнительный источник ошибки, а именно, односторонняя осадка основания основы 231 на возможно очень малый угол α. Модули 201 измерения силы автоматически компенсируют наклонное положение основания 221, всегда самовыравнивая их параллельно силе, действующей на них, то есть вертикальной силе тяготения. Однако, это заставляет приемник 230 силы сдвинуть свое положение так, что край приемника силы касается основания 231. В этом случае, аналогично, свобода перемещения приемника силы ограничивается, как указано стрелками, направленными в остающемся направлении свободного перемещения. В этом случае внимание пользователя снова обращается на проблемную ситуацию.
На фиг.5a и 5b схематично представлен модуль 201 измерения силы, соответствующий фиг.3, в котором датчик 250 подвижности осуществляется в форме интегральной схемы. На фиг.5a представлен вид сбоку в разрезе и на фиг.5b представлен вид в плоскости сечения, обозначенного линией A-A на фиг.5a. Для датчика 250 подвижности можно использовать коммерчески доступный датчик типа, пригодного для измерения подвижности или перемещения элемента 240 передачи силы, например, датчик ускорения. Датчик подвижности в показанном варианте осуществления в состоянии обнаружить перемещения в пространственных направлениях x и y. Направления x и y определяют плоскость, которая, по существу, ортогональна к направлению оси Z, причем последняя представляет направление элемента 240 передачи силы, то есть направления пути прохождения силы в деформируемом теле 210.
Для определения подвижности модуля 201 измерения силы и деформируемого корпуса 210, который является частью модуля измерения силы, можно также использовать трехмерные датчики 250 подвижности. Трехмерные датчики создают соответствующий сигнал для каждой из трех пространственных координат.
Таким образом, каждый из сигналов коррелируется с соответствующей пространственной компонентой перемещения.
При использовании трехмерного датчика 250 подвижности возможно выполнить преобразование координат, чтобы изменить ориентацию системы координат, в которой определяются компоненты сигнала датчика. Здесь преимущество состоит в том, что результаты измерений могут быть адаптированы к любому положению установки датчика 250 подвижности с помощью простого набора параметров конфигурации, которые определяют преобразование координат. Таким образом, подвижность деформируемого тела 210 относительно направлений x и y, которые проходят ортогонально к направлению деформируемого тела 210, может быть также определена точно (в противоположность просто приблизительному определению), если датчик подвижности не выравнивается относительно какой-либо специальной ориентации.
Основываясь на сигналах трехмерных датчиков подвижности, мгновенный угол θ наклона деформируемого тела 210 вычисляется посредством преобразования в сферические координаты. Из этого угла θ наклона угловая скорость угла наклона определяется как производная по времени dθ/dt угла θ наклона, и из угловой скорости удельная угловая энергия Eθ вычисляется согласно формуле:
Eθ~(dθ/dt)2.
Удельная угловая энергия Eθ угла θ наклона, вычисленная таким образом, затем служит в качестве параметра М, чтобы характеризовать перемещение деформируемого тела 210.
Предпочтительным выбором для датчика 250 подвижности является коммерчески доступный датчик подвижности, например, типа SCA3000, изготавливаемый компанией VTI Technologies. Этот датчик выполнен на основе емкостного элемента датчика с тремя чувствительными к ускорению массами, участком обработки сигнала на ASIC-основе и цифровым интерфейсом. Это позволяет иметь очень компактную и экономически выгодную конструкцию, обеспечивающую сигналы в подходящем формате выходного сигнала.
Как схематично представлено на фиг.5b, датчик 250 подвижности соединяется с компаратором 260, установленным в модуле 201 измерения силы. Сигнал SM датчика 250 подвижности, выраженный, например, как кинетическая энергия Eθ, проходит непосредственно на компаратор 260. Последний сравнивает сигнал SM датчика 250 подвижности с заданным пороговым значением T и заставляет срабатывать устройство 200 измерения силы, если значение Eθ не доходит или превышает или падает ниже порогового значения T. Соответственно, вместо сигнала SM, передаваемого непрерывно, передача теперь ограничивается сообщением конкретных одиночных событий на компьютерный блок 206, за счет чего поток передачи данных сильно сокращается.
Конечно, то, что здесь было сказано об обработке сигналов датчика, не ограничивается угловыми перемещениями элемента передачи силы, а также полностью применимо к поступательным перемещениям, таким как поступательная скорость и/или поступательное ускорение и/или поступательная кинетическая энергия подвижного элемента передачи силы, соответствующего фиг.2.
На фиг.6a-6c представлены примеры временных графиков сигналов измерения, полученных при измерении веса, которое было выполнено с помощью модуля 201 измерения силы, соответствующего фиг.5. Сигнал SF измерения веса представлен на графике на фиг.6a, соответствующий сигнал датчика подвижности для угла θ наклона показан на временной диаграмме на фиг.6b и соответствующий сигнал датчика подвижности для удельной угловой энергии Eθ показан на временной диаграмме на фиг.6c.
В дополнение к сигналу удельной угловой энергии Eθ, на фиг.6c пунктирной линией показана временная зависимость сигнала SD указателя сопротивления среды. Указатель сопротивления среды в определенные моменты времени захватывает мгновенное значение измерения, в данном случае - сигнал удельной угловой энергии Eθ, и остается постоянным с этим захваченным значением в течение определенного временного интервала. Это дает возможность достоверно зарегистрировать и оценить даже переходные явления, такие как пики сигнала.
Между моментами времени t0 и t1 устройство измерения силы является неподвижным, так что сигнал SF измерения и соответствующие сигналы угла θ наклона и удельная угловая энергия Eθ выключается, чтобы быть, по существу, постоянной.
Между моментами времени t1 и t2 прибывает груз в виде транспортного средства, которое заезжает на приемник силы, как показано на фиг.4. Это заставляет сигнал SF измерения, представляющий добавленный вес транспортного средства, увеличиться до более высокого уровня. Сигнал, представляющий угол θ наклона, показывает относительно сильные колебания, возможно связанные с большим угловым отклонением модулей 201 измерения силы. Однако, удельная угловая энергия Еθ в этом временном интервале остается имеющей относительно низкое значение. Это может быть индикацией того, что свободная подвижность элемента передачи силы гарантирована не полностью, и что элемент передачи силы поэтому частично ограничивается, по меньшей мере, в этот конкретный момент времени.
Сигнал указателя тяги остается ниже значения заданного порогового значения T. Поэтому, сравнивая сигнал SD указателя тяги с пороговым значением T, компаратор 260 на фиг.5 будет обнаруживать чрезмерное отклонение или нехватку и, соответственно, будет вызывать включение в действие устройства измерения силы.
Фактический процесс взвешивания имеет место между моментами времени t2 и t3. Устройство измерения силы находится в состоянии покоя, и сигналы в значительной степени являются постоянными.
Между моментами времени t3 и t4 устройство измерения силы возвращается в состояние, свободное от нагрузки, например, когда транспортное средство съехало с весов. Сигнал угла θ наклона показывает менее резко выраженные колебания, чем во время этапа нагрузки; сигнал удельной угловой энергии Eθ, с другой стороны, достигает значительно более высоких уровней. Это ведет к выводу, что элемент 240 передачи силы в этом случае должен иметь свою свободную подвижность, что представляется более вероятным.
На весах для транспортного средства, как показано на фиг.4a-4c, особенно предпочтительно определять, основываясь на другой доступной информации, действительно ли и в какой степени сигналы, представленные на фиг.6a-6c, указывают на отсутствие или уменьшение свободной подвижности элемента передачи силы. На параметр М, который характеризует свободную подвижность, воздействуют, с одной стороны, масса и, с другой стороны, скорость транспортного средства по мере того, как оно въезжает и съезжает с платформенных весов. Чтобы определить выражение, которое связывает две вышеупомянутых величины, можно использовать, например, результат взвешивания, чтобы поддержать диагноз относительно подвижности или ее отсутствия.
На основе этих результатов решение, должен ли результат измерения быть принят как верный или должен быть отклонен, может быть принято либо пользователем устройства измерения силы, либо в устройстве обработки сигнала, установленном дальше по ходу обработки сигнала.
Изобретение было описано и проиллюстрировано на предпочтительных вариантах осуществления. Однако, основываясь на концепциях, развитых изобретением, лица, обладающие необходимым техническим уровнем знаний, смогут осуществить дополнительные варианты осуществления, попадающие в пределы объема настоящего изобретения.
Перечень ссылочных позиций
1, 200 Устройство измерения силы
3, 30, 230 Приемник силы
7, 70, 207 Индикаторный блок
8 Предупреждающее сообщение
10 Камера измерения силы
11 Неподвижная часть
12 Подвижная часть
13 Промежуточная часть
14, 214 Измерительный преобразователь
20, 220 Корпус
21 Опора
22 Проходное отверстие в корпусе
31 Стержень
40, 240 Элемент передачи силы
50, 250 Датчик подвижности
51, 52, 53, 252 Соединительные линии
60, 260 Компаратор
201 Модуль измерения силы
202, 204 Передатчик/Делитель
205 Система шин
206 Компьютерный блок/ведущий компьютер
210 Деформируемое тело
215 Соединение для сигнала измерения
230 Приемник силы
231 Основание
232 Ножка контейнера
θ Угол наклона
Vθ Скорость изменения угла наклона
Еθ Удельная энергия углового перемещения
E* Удельная кинетическая энергия
F Входная сила
М Параметр
SD Сигнал указателя тяги
SF Сигнал измерения
SM Сигнал датчика подвижности
T Пороговое значение
Vx, Vy Компонент перемещения
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ МНОЖЕСТВА СИЛ, СИЛОИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ И СПОСОБЫ МОНИТОРИНГА СОСТОЯНИЯ УСТРОЙСТВА ИЗМЕРЕНИЯ МНОЖЕСТВА СИЛ | 2008 |
|
RU2451912C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ СИЛОИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА, СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СИЛОИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2008 |
|
RU2454632C2 |
| СПОСОБ МОНИТОРИНГА И/ИЛИ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ СИЛОИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА И СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2008 |
|
RU2461802C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНЫХ ХАРАКТЕРИСТИК | 1992 |
|
RU2124701C1 |
| Способ измерения силы нажатия методом оптической анизотропной диффузионной тензометрии и датчик для измерения силы нажатия | 2022 |
|
RU2822100C2 |
| НОСИМОЕ УСТРОЙСТВО ДЛЯ СВЯЗИ С ОФТАЛЬМОЛОГИЧЕСКИМ УСТРОЙСТВОМ | 2019 |
|
RU2795397C2 |
| Устройство для измерения силы | 1990 |
|
SU1760387A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ МАГНИТНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2186381C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2046343C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
Изобретение относится к области весоизмерительной техники и направлено на упрощение конструкции и повышение точности и эффективности измерения силы, что обеспечивается за счет того, что при осуществлении контроля состояния устройства измерения силы с подвижным элементом передачи силы, через который сила, воздействующая на устройство измерения силы, передается на измерительный преобразователь, формирующий сигнал измерения, соответствующий приложенной силе, после чего сигнал преобразуют в форму, пригодную для индикации на дисплее, или передается для дальнейшей обработки. При этом, согласно изобретению, определяют, по меньшей мере, один параметр (М), который характеризует свободную подвижность элемента передачи силы или изменение упомянутой свободной подвижности во времени, причем параметр сравнивают, по меньшей мере, с одним пороговым значением и причем в зависимости от результата сравнения обнаруживают либо нормальное состояние, либо ограничение свободной подвижности элемента (передачи силы, и причем в случае, когда было обнаружено ограничение свободной подвижности, устройство измерения силы приводится в действие. 2 н. и 14 з.п. ф-лы, 6 ил.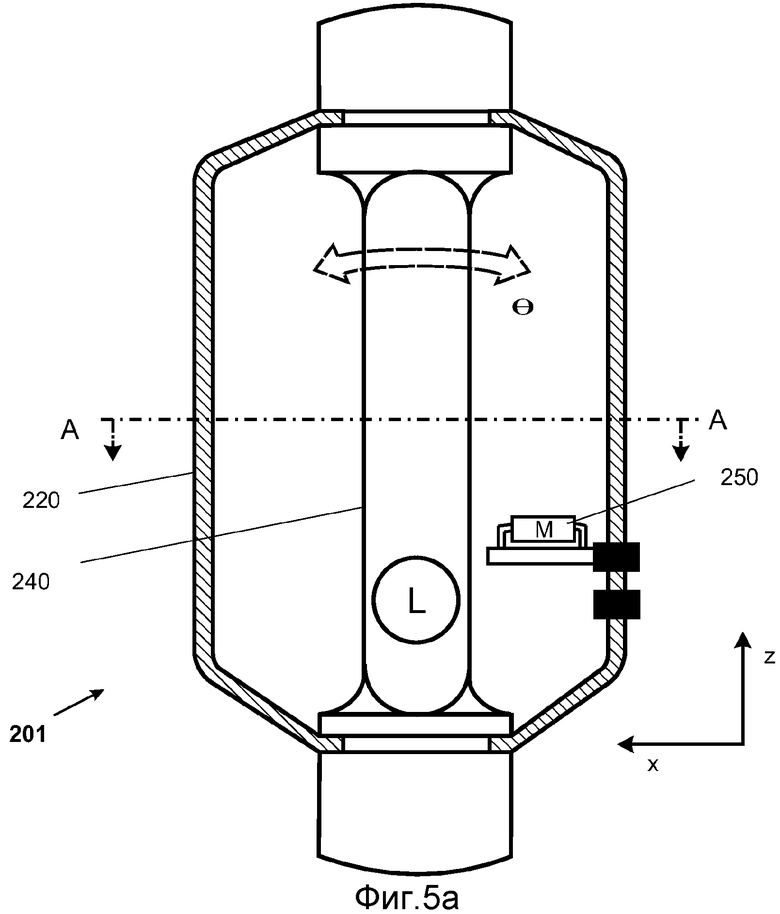
1. Способ контроля состояния устройства (1, 200) измерения силы, в особенности, взвешивающего устройства, с подвижным элементом (40, 240) передачи силы, через который сила, воздействующая на устройство (1, 200) измерения силы, передается на измерительный преобразователь (14, 214), формирующий сигнал (SF) измерения, соответствующий приложенной силе, после чего сигнал преобразуют в форму, пригодную для индикации на дисплее, или передается для дальнейшей обработки, отличающийся тем, что определяют, по меньшей мере, один параметр (М), который характеризует свободную подвижность элемента (40, 240) передачи силы или изменение упомянутой свободной подвижности во времени, причем параметр (М) сравнивают, по меньшей мере, с одним пороговым значением (Т) и причем в зависимости от результата сравнения обнаруживают либо нормальное состояние, либо ограничение свободной подвижности элемента (40, 240) передачи силы, и причем в случае, когда было обнаружено ограничение свободной подвижности, устройство (1, 200) измерения силы приводится в действие.
2. Способ по п.1, отличающийся тем, что величина, характеризуемая параметром (М), является, в основном, поступательной скоростью, и/или угловой скоростью, и/или поступательным ускорением, и/или угловым ускорением, и/или кинетической энергией, в частности удельной энергией углового перемещения (Еθ) элемента (40, 240) передачи силы.
3. Способ по п.1, отличающийся тем, что величина, характеризуемая параметром (М), является подвижностью, по меньшей мере, в одном направлении, которое ориентируется, по существу, ортогонально направлению пути прохождения силы к элементу (40, 240) передачи силы.
4. Способ п.1, отличающийся тем, что пороговое значение (Т) является заданным, заранее определенным значением, и если упомянутое пороговое значение (Т) не достигается, и/или если оно превышается, и/или если оно пересекается в убывающем направлении, устройство (1, 200) измерения силы приводится в действие.
5. Способ п.1, отличающийся тем, что сигнал (SF) измерения измерительного преобразователя (14, 214), в частности сигнал, указывающий, что было обнаружено изменение входной силы, используют для определения временного интервала, в течение которого определяют параметр (М) и/или в течение которого параметр (М) сравнивают с пороговым значением (Т).
6. Способ по п.1 или 5, отличающийся тем, что приведение в действие состоит из выдачи предупреждения и/или выдачи тревоги, и/или прекращения отображения, и/или запрещения передачи сигнала (SF) измерения или значений результата измерения, формируемых из него.
7. Способ по п.1, отличающийся тем, что подвижность элемента (40, 240) передачи силы определяют относительно заданных прямоугольных координат или заданных сферических координат, и что параметр (М) определяется, основываясь на подвижности или изменении подвижности, как они выражаются в терминах этих координат.
8. Способ по п.1 или 7, отличающийся тем, что перемещение элемента (40, 240) передачи силы, по меньшей мере, в одном направлении измеряется датчиком (50, 250) подвижности, и что упомянутое перемещение, по меньшей мере, в одном направлении затем арифметически преобразуют в соответствии с пространственной ориентацией датчика подвижности в дополнительное направление перемещения, относительно направления которого определяют параметр (М), в котором упомянутое арифметическое преобразование может быть выполнено посредством преобразования координат.
9. Устройство (1, 200) измерения силы, конкретно взвешивающее устройство, с подвижным элементом (40, 240) передачи силы, через который сила, действующая на устройство (1, 200) измерения силы, передается к измерительному преобразователю (14, 214), формирующему сигнал (SF) измерения, соответствующий приложенной силе, после чего сигнал может быть передан далее на индикаторный блок (7, 70, 207) или на дополнительное устройство обработки, отличающееся тем, что подвижный элемент (40, 240) передачи силы механически соединяется с датчиком (50, 250) подвижности, предназначенным для определения параметра (М), характеризующего свободную подвижность элемента (40, 240) передачи силы или изменение упомянутой свободной подвижности во времени, причем датчик (50, 250) подвижности электрически соединяется с компаратором (60, 260), функционирующим для сравнения параметра (М), по меньшей мере, с одним пороговым значением (Т), и что, в зависимости от результата сравнения, устройство (1, 200) измерения силы приводится в действие.
10. Устройство (1, 200) измерения силы по п.9, отличающееся тем, что датчик (50, 250) подвижности выполнен с возможностью определения поступательной скорости, и/или угловой скорости, и/или поступательного ускорения, и/или углового ускорения, и/или кинетической энергии элемента (40, 240) передачи силы.
11. Устройство (1, 200) измерения силы по п.9, отличающееся тем, что датчик (50, 250) подвижности выполнен с возможностью определения подвижности, по меньшей мере, в одном направлении, являющемся, по существу, ортогональным к направлению пути прохождения силы в элементе (40, 240) передачи силы.
12. Устройство (1, 200) измерения силы по п.9, отличающееся тем, что элемент (40, 240) передачи силы содержит подвижный приемник (30, 230) силы и либо стержень (31), либо деформируемое тело (210), в частности самоустанавливающуюся распорку.
13. Устройство (1, 200) измерения силы по п.12, отличающееся тем, что датчик (50, 250) подвижности напрямую соединяется с подвижным приемником (300, 230) силы.
14. Устройство (1, 200) измерения силы по п.9 или 11, отличающееся тем, что датчик (50, 250) подвижности жестко соединяется с элементом (40, 240) передачи силы.
15. Устройство (1, 200) измерения силы по п.9 или 12, отличающееся тем, что устройство (1, 200) измерения силы выполнено в виде модульной конструкции, по меньшей мере, с двумя модулями (201) измерения силы, каждый из которых содержит измерительный преобразователь (214).
16. Устройство (1, 200) измерения силы по п.15, отличающееся тем, что, по меньшей мере, один из модулей (201) измерения силы содержит корпус (220), который защищает измерительный преобразователь (214), и причем датчик (250) подвижности устанавливается внутри упомянутого корпуса (220) или на упомянутом корпусе (220).
| КЛАВИШНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 0 |
|
SU254594A1 |
| ЕР 0557528 А1, 01.09.1993 | |||
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ЗАУСЕНЦЕВ С ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 1972 |
|
SU432979A1 |
| US 4107985 А, 22.08.1978 | |||
| RU 94023632 А1, 27.01.1996. | |||

