Изобретение относится к измерительной технике и может быть использовано для измерения плотности (в том числе локальной плотности) жидких сред и газовых сред.
Известен способ измерения плотности заключающийся в том, что с помощью груши в герметичный корпус отбирают определенное количество измеряемой жидкости, чтобы поплавковый поворотный элемент со шкалой отсчета был полностью погружен в жидкость. В зависимости от плотности жидкости поплавковый поворотный элемент с отсчетной меткой поворачивается на определенный угол и далее с помощью отсчетной метки, нанесенной заранее на корпусе определяется плотность. См. описание к патенту RU №2062450 кл. G01N 9/12, опубл. 20.06.96. Бюл. №17. Однако этому способу присущи ограничения и недостатки и он может быть использован для измерения плотности только поверхностных слоев жидкой среды. Для обеспечения точности измерений требуется дополнительный контроль параметров окружающей среды (например, температуры воздуха) в процессе эксплуатации. Способу присущи погрешности измерений, вносимые случайными возмущениями поверхности жидкости.
Наиболее близким по технической сущности к заявляемому способу, принятому за прототип, является способ измерения плотности, заключающийся в полном погружении физического тела с определенными массой и объемом в измеряемую среду. Перед погружением физического тела в измеряемую среду производят определение координат центра масс и центра выталкивающих сил физического тела, подвешенного на оси вращения, соответствующие вакууму. При этом центр масс и центр выталкивающих сил погружаемого физического тела не должны находится на одной прямой линии с точкой подвеса. Полностью погруженное в жидкость физическое тело поворачивается вокруг оси подвеса на угол α, который соответствует плотности жидкости, вместе с осью на тот же угол α поворачивается магнит и вектор магнитного поля, который, воздействуя на датчик Холла, приводит к появлению на его выходе напряжения, пропорционального углу поворота физического тела. Данные поступают в блок управления, где по конкретной формуле определяют плотность измеряемой среды в точке подвеса (можно мерить высоту, зная плотность). См. описание к патенту RU №2331865 кл. G01N 9/10, опубл. 20.08.08. Бюл. №23. Данный способ позволяет обеспечить измерение плотности в резервуарах одновременно по всей высоте имеющегося уровня жидкости. Однако он не позволяет измерить плотность газообразной массы, и этому способу присущи ограничения и недостатки, вносимые случайными возмущениями различного рода.
Известен датчик измерения плотности, содержащий чувствительный элемент, При этом поплавковый поворотный элемент размещен на закрепленной в корпусе оси вращения таким образом, чтобы центры масс и центры выталкивающих сил поплавков были смещены относительно оси вращения, и соединяющая их прямая не пересекала ось вращения на торце оси, обращенной перпендикулярно к блоку центрального процессорного устройства с разъемом, расположен магнит, имеющий радиальную намагниченность. См. патент RU №2062450 кл. G01N 9/12, опубл. 20.06.96. Бюл. №17. Однако этому устройству присущи ограничения и недостатки и он может быть использован для измерения плотности только поверхностных слоев жидкой среды. Для обеспечения точности измерений требуется дополнительный контроль параметров окружающей среды (например, температуры воздуха) в процессе эксплуатации. Устройству присущи погрешности измерений, вносимые случайными возмущениями поверхности жидкости.
Наиболее близким по технической сущности к заявляемому устройству, принятому за прототип, является датчик измерения плотности, состоящий из перфорированного кожуха, к которому сверху и снизу прикреплены перфорированные нижний и верхний фланцы. На верхнем фланце закреплены кронштейн чувствительного элемента и разъем блока центрального процессорного устройства. Все детали плотномера выполнены из немагнитных материалов См. описание к патенту RU №2331865 кл. G01N 9/10, опубл. 20.08.08. Бюл. №23. Данное устройство позволяет обеспечить измерение плотности в резервуарах одновременно по всей высоте имеющегося уровня жидкости. Однако это устройство не позволяет измерить плотность газообразной массы над ним, и ему присущи ограничения и недостатки, вносимые случайными возмущениями различного рода.
Известен чувствительный элемент, расположенный снизу корпуса датчика измерения плотности и состоящий из коромысла, на противоположных концах которого расположен поплавок и постоянный магнит. При этом коромысло расположено в опорах вращения корпуса. См. патент RU №2095785, опубл. 10.11.97. Данное устройство позволяет обеспечить измерение плотности в резервуарах одновременно по всей высоте имеющегося уровня жидкости. Однако это устройство не позволяет измерить плотность газообразной массы над ним, и ему присущи ограничения и недостатки, вносимые случайными возмущениями различного рода.
Известен, принятый за прототип, чувствительный элемент, который расположен на кронштейне, установленным на верхнем фланце корпуса. Чувствительный элемент закреплен на оси, расположенной горизонтально и перпендикулярно плоскости, проходящей через точку пересечения направления силы тяжести чувствительного элемента и оси подвеса, центр масс и центр выталкивающих сил. На торце оси подвеса, обращенной перпендикулярно к блоку центрального процессорного устройства (ЦПУ), закреплен магнит, имеющий радиальную намагниченность. Т.о. в качестве чувствительного элемента в измерителе плотности используется физическое тело со смещенным центром масс, расположенным на оси подвеса относительно центра выталкивающих сил. Ось подвеса закреплена в кронштейне посредством подшипников. В зависимости от условий эксплуатации в устройстве используются фторопластовые или сапфировые подшипники.
Известен блок управления датчика плотности, включающий датчик положения подвижной системы, блок управления током соленоида, имеющий в своем составе усилитель переменного тока и фазочувствительный усилитель, причем вход усилителя переменного тока соединен с датчиком положения подвижной системы, а выход фазочувствительного усилителя подключен к обмотке усилителя. Имеется также измерительный прибор, подключенный параллельно резистору, соединенному последовательно с обмоткой соленоида. См. Кацнельсон О.Г. и Эдельштейн А.С., «Автоматические измерительные приборы с магнитной подвеской», М., «Энергия», 1970, с.180, рис. 7.2. Недостатками этого блока управления и в целом датчика плотности являются наличие датчика положения подвижной системы, приводящее к усложнению конструкции и увеличению ее габаритов, а также дополнительная погрешность, вызванная магнитным взаимодействием сердечника с катушкой дифференциально-трансформаторного типа, что влияет на точность измерения.
Известен принятый за прототип блок управления датчика плотности, включающий дифференциальный усилитель сигнала разбаланса моста переменного тока, включенный на входе усилителя амплитудный детектор, выход которого одновременно соединен со входами пропорционального усилителя и интегратора, а выходы усилителя и интегратора соединены с двумя входами сумматора, к третьему входу которого подключен источник регулируемого напряжения. Выход сумматора соединен со входом регулируемого источника постоянного тока, состоящего из предварительного усилителя мощности, в цепь обратной связи которых включены катушки соленоида. Измерительный прибор подключен также к выходу сумматора. См. описание к авторскому свидетельству SU №665248 кл. G01N 9/18, опубл. 30.05.79. Бюл. №20. Данное устройство позволяет упростить конструкции и уменьшить габариты. Однако точность измерения и сложность конструкции оставляют желать лучшего.
Задачей, на решение которой направлена группа изобретений, является разработка широкого спектра разнообразных измерительных устройств, спроектированных на основе чувствительных элементов, принцип действия которых основан на заявленном ниже способе измерения плотности, и предназначены для автоматизированного измерения и мониторинга плотности жидких и газообразных сред на различных технических объектах и в ходе разнообразных технологических процессов.
Технический результат заключается в возможности измерения плотности в резервуарах по всей высоте имеющегося уровня жидкости и газов.
Это достигается тем, что способ измерения плотности сред, заключается в полном погружении физического тела с определенными массой, объемом и магнитными свойствами в измеряемую среду, при этом в месте расположения тела создается магнитное поле, величина и направление которого изменяются посредством контролируемого изменения физического параметра, причем перед началом измерения значение этого параметра таково, что тело занимает положение устойчивого покоя во всем диапазоне измеряемых параметров, а по мере изменения этих физических параметров в процессе измерения, это положение покоя становится неустойчивым и тело скачкообразно переходит в новое положение устойчивого покоя при определенном значении этого физического параметра, регистрируемого в момент этого перехода, причем однозначная функциональная зависимость в момент этого перехода между значением физического параметра и плотностью измеряемой среды позволяет определить значение плотности среды по зарегистрированному значению физического параметра.
Это достигается тем, что датчик измерения плотности состоит из чувствительного элемента, расположенного внутри перфорированного кожуха, к которому сверху и снизу прикреплены перфорированные нижний и верхний фланцы, при этом чувствительный элемент расположен сверху на нижнем фланце внутри соленоида вместе с датчиками положения чувствительного элемента и датчиком температуры.
Это достигается тем, что датчик измерения плотности (вариант) состоит из чувствительного элемента, расположенного внутри перфорированного кожуха, к которому сверху и снизу прикреплены перфорированные нижний и верхний фланцы, при этом чувствительный элемент выполнен в виде катушки с контуром и расположен сверху на нижнем фланце внутри соленоида вместе с датчиками положения чувствительного элемента и датчиком температуры.
Это достигается тем, что чувствительный элемент, состоит из установленного на оси подвеса физического тела с постоянным магнитом, ось подвеса которого не проходит ни через центр масс физического тела (ц.м.), ни через центр выталкивающих сил (ц.в.с.), при этом ось подвеса физического тела расположена ниже центра масс физического тела, снизу которого установлен постоянный магнит, имеющий определенную намагниченность, при этом физическое тело имеет возможность вращаться вокруг оси подвеса на угол λ до соприкосновения с противоположными стенками перфорированного кожуха.
Где угол λ - угол отклонения от одного до противоположного состояния устойчивого покоя чувствительного элемента относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через центр оси подвеса в градусах.
Это достигается тем, что чувствительный элемент (вариант), состоит из установленного на оси подвеса физического тела с постоянным магнитом, ось подвеса которого не проходит ни через центр масс физического тела (ц.м.), ни через центр выталкивающих сил (ц.в.с.), при этом ось подвеса физического тела расположена ниже центра масс физического тела, снизу которого установлен постоянный магнит в виде катушки с контуром для формирования магнитного поля подходящей конфигурации, при этом физическое тело имеет возможность вращаться вокруг оси подвеса на угол λ до соприкосновения с противоположными стенками перфорированного кожуха.
Где угол λ - угол отклонения от одного до противоположного состояния устойчивого покоя чувствительного элемента относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через центр оси подвеса в градусах.
Это достигается тем, что блок управления, состоит из микрокомпьютера с формирователями тока соленоида, при этом в состав блока управления входят формирователь пилообразного тока с формирователем тока для соленоида, генератор импульсов со счетчиком импульсов, блок памяти и интерфейс с подключением на внешние устройства пользователя и через соединительную коробку с датчиками положения, а также датчиком температуры и соленоидом, подключенные к микрокомпьютеру и имеющие с ним обратные связи.
Это достигается тем, что блок управления (вариант), состоит из микрокомпьютера с формирователями тока соленоида, и в состав блока управления входят формирователь пилообразного тока с формирователем тока для соленоида, генератор импульсов со счетчиком импульсов, блок памяти и интерфейс с подключением на внешние устройства пользователя и через соединительную коробку с датчиками положения, а также датчиком температуры и соленоидом, подключенные к микрокомпьютеру и имеющие с ним обратные связи, при этом блок управления включает формирователь тока для формирования магнитного контура.
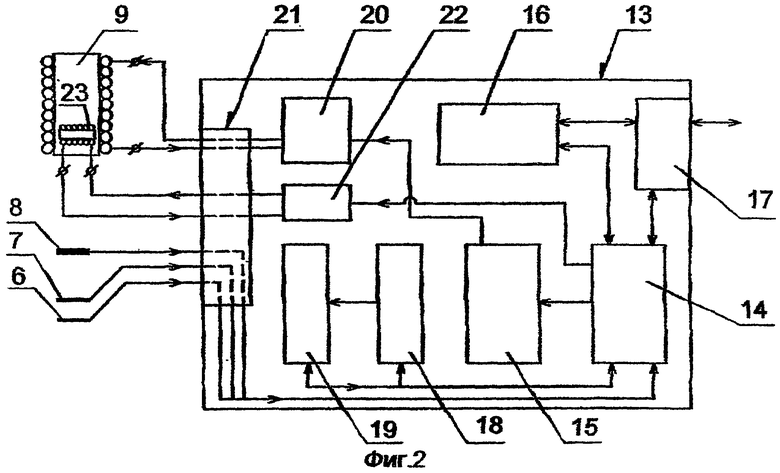
На фиг.1 изображен общий вид датчика измерения плотности.
На фиг.2 изображена схема блока управления (в варианте с катушкой для магнита вместо постоянного магнита).
Датчик измерения плотности, реализующий способ измерения плотности состоит из перфорированного кожуха 1, к которому сверху и снизу прикреплены перфорированные нижний 2 и верхний 3 фланцы. На нижнем фланце 2 закреплены кронштейн 4 с чувствительным элементом 5, а также два датчика положения левый 6 и правый 7 и датчик температуры 8. К нижнему фланцу 2 крепится соленоид 9.
Чувствительный элемент 5 расположен на кронштейне 4 в его верхней части при помощи оси подвеса 10 и состоит из физического тела 11,например, в виде конуса и встроенного в него снизу к основанию на оси подвеса 10 постоянного магнита 12, имеющего намагниченность. При этом физическое тело установлено на оси подвеса 10, ось которой не должна проходить ни через центр масс тела (ц.м.), ни через центр выталкивающих сил (ц.в.с.), который является центром приложения результирующей выталкивающей архимедовой силы, действующей на тело со стороны измеряемой среды, в которую погружено физическое тело 11. Ц.м. тела и ц.в.с. тела должны располагаться относительно оси вращения тела таким образом, чтобы моменты силы тяжести и архимедовой выталкивающей силы относительно этой оси имели противоположное направление.
Чувствительный элемент 5 со встроенным магнитом 12 имеет возможность вращаться вокруг оси подвеса 10 от левой к правой стенке перфорированного кожуха 1 и наоборот от правой к левой. При этом, при вертикальном расположении датчика измерения плотности, соответствующего изображению и соответственному расположению оси подвеса 10 на фиг.1 физическое тело 11 чувствительного элемента 5 всегда будет находиться в состоянии покоя, опираясь на левую или правую стенку перфорированного кожуха 1, и это состояние покоя имеет устойчивый характер.
Условно левую сторону стенки перфорированного кожуха 1 обозначаем положение А, а правую сторону стенки перфорированного кожуха 1 обозначаем положение В. Угол отклонения чувствительного элемента в положение А или в положение В относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через центр оси подвеса 10, является одинаковым для этих положений и обозначается углом λ. Хотя положение А или положение В является устойчивым положением физического тела 11, физическое тело 11 может переходить из положения А в положение В и наоборот. Этот переход осуществляется и задается блоком управления 13 (см. фиг.2).
Датчик измерения плотности и чувствительный элемент 5 являются погружаемыми элементами, а блок управления 13 находится за пределами погружения и соединен с датчиком измерения плотности кабелем (на фиг. не показано).
Блок управления 13 состоит из микрокомпьютера 14, формирователя пилообразного тока 15, блока памяти 16, контактного или беспроводного интерфейса 17 для подключения внешних устройств управления, технического обслуживания, тестирования, поверки и обработки информации, генератора импульсов 18, счетчика импульсов 19, формирователя тока 20 для соленоида 9 и соединительной коробки 21, через которую к блоку управления 13 подключены датчики положения 6 и 7, а также датчик температуры 8 и соленоид 9.
Способ измерения плотности, который реализуется с помощью предлагаемого датчика измерения плотности, чувствительного элемента и блока управления заключается в полном погружении, обладающего магнитными свойствами физического тела 11 с предварительно определенными массой, объемом и магнитными характеристиками в измеряемую среду. В области расположения физического тела действует или создается магнитное поле, характеристики которого изменяются контролируемым образом путем изменения физического параметра, например, тока, могущего влиять на характеристики магнитного поля.
Перед проведением измерения плотности среды, физическому параметру, контролирующему величину и направление внешнего магнитного поля, придают такое значение, чтобы погруженное в среду физическое тело заняло некоторое устойчивое исходное положение покоя, которое не должно зависеть от плотности среды во всем диапазоне измерения плотности. Расположение ц.м. тела и ц.в.с. физического тела относительно друг друга и относительно оси вращения физического тела, а также значения массы физического тела, его объем и магнитные свойства физического тела выбираются таким образом, чтобы при последующем изменении физического параметра, контролирующего величину и направление магнитного поля в месте расположения физического тела 11, исходное устойчивое положение покоя, в котором находилось физическое тело 11 при погружении, переходило в другое противоположное устойчивое положение при некотором значении этого параметра и тело бы поворачивалось вокруг оси подвеса 10, переходя скачкообразно в новое устойчивое положение (т.е. в поведении тела имеет место триггерный эффект). При этом величина управляющего параметра, при котором происходит этот скачкообразный переход из одного устойчивого положения в другое, находится во взаимно однозначной зависимости с плотностью среды, в которую погружено тело, что позволяет определить плотность среды по известному значению этого параметра, измеренному в момент скачкообразного перехода. В качестве датчиков положения 6, 7 могут быть использованы, например, датчики Холла, которые позволяют однозначно зафиксировать факт нахождения тела в одном из двух устойчивых положений покоя А или В. Конкретное устойчивое положение покоя определяется величиной и направлением тока в соленоиде 9, задаваемым блоком управления 13.
Перфорированный кожух 1, к которому сверху и снизу прикреплены перфорированные нижний 2 и верхний 3 фланцы, является корпусом датчика измерения плотности и выполнен из немагнитных материалов. Корпус датчика был изготовлен в виде цилиндра диаметром ⌀ 60,0 мм и высотой 100,0 мм. Из аналогичного материала изготовлен кронштейн 4.
Физическое тело 11 чувствительного элемента 5 может быть выполнено из металла или композитного материала в виде полого металлического конуса с цилиндрической частью у нижнего основания и имеет габариты, находящиеся в зависимости от типа жидкости, диапазона измерения и условий эксплуатации устройства, габаритов корпуса. Форма физического тела 11 может быть любой, например, в виде прямоугольной или треугольной пластины, установленной на плоском основание в виде диска с встроенным снизу магнитом.
При изготовлении чувствительного элемента 5 предполагается, что физическое тело 11 должно обладать магнитными свойствами, что достигается либо намагничиванием самого вещества, из которого состоит тело, либо включением в состав тела постоянных магнитов, катушек с током (соленоидов) с сердечником или без него, а также прочих контуров с током, различной конфигурации. В качестве чувствительного элемента 5 в изготовленном датчике плотности было использовано физическое тело 11 в виде полого конуса, изготовленного из стали, установленного на оси подвеса 10 диаметром ⌀3,0 мм. Физическое тело 11 может быть, как жестко закреплено на вращающейся оси подвеса 10, так и вращаться свободно вокруг оси, вращающейся или закрепленной. Для снижения трения ось подвеса 10 может быть закреплена в кронштейне 4 посредством подшипников качения, скольжения, игольчатых и др. в зависимости от условий эксплуатации. Физическое тело 11 монтируется на оси подвеса 10, ось вращения которой не должна проходить ни через ц.м., ни ц.в.с, действующей на тело со стороны измеряемой среды, в которую погружено физическое тело 11. При этом центр масс физического тела 11 и ц.в.с. должны располагаться относительно оси вращения физического тела 11 таким образом, чтобы моменты силы тяжести и архимедовой выталкивающей силы относительно этой оси имели противоположное направление.
Угол λ является углом отклонения чувствительного элемента до устойчивых положений покоя относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через ось оси подвеса 10, т.е. отклонение в положение А или в положение В от оси симметрии оси подвеса чувствительного элемента. Угол λ выбирается исходя из расчетной плотности измеряемой среды, габаритов корпуса и формы чувствительного элемента. В нашем случае, угол λ показанный на фиг.1 выбирался исходя из принадлежности этого датчика для измерения нефтепродуктов с расчетной плотностью от 600.0 кГ/см3 до 1000.00 кГ/см3. А форма физического тела 11 была выбрана из условия имеющегося оборудования и предыдущих имеющихся наработок по получению градуировочных характеристик для подобного типа физических тел чувствительных элементов.
Блок управления 13 выполнен в виде печатной платы. Микрокомпьютер 14 может быть, например, типа AVR, ARM и т.п.
Конкретная конфигурация формирователя пилообразного тока 15, блока памяти 16, интерфейса 17, генератора импульсов 18, счетчика импульсов 19 и формирователя тока 20 для соленоида 9 выбирается из каталога фирмы "ANALOG DEVIECES".
В состав блока управления 13 включаются по необходимости всевозможные устройства ввода-вывода, образующие в совокупности интерфейс пользователя, в их числе устройства отображения информации, например, LCD дисплей и устройства управления и ввода, например, клавиатура, сенсорная панель.
Блок управления 13 работает следующим образом. При погружении датчика измерения плотности в измеряемую среду, когда чувствительный элемент 5 плотномера с датчиками положения 6 и 7 полностью погружены в измеряемую среду, физическое тело 11 находится в одном из крайних устойчивых положений покоя А или В, которое фиксируется датчиком положения либо левым 6, либо правым 7. Пусть для примера, физическое тело 11 находится в положении покоя А. Тогда, датчик положения 6 посылает импульс на микрокомпьютер 14 о положении физического тела 11. Микрокомпьютер 14, согласно, заложенной программы, посылает сигнал на формирователь пилообразного тока 15 и далее на формирователь тока 20 для соленоида 9. Формирователь тока 20 меняет величину и направление тока подмагничивания на соленоид 9 при котором физическое тело 11 перейдет скачкообразно в новое устойчивое положение покоя В, что зафиксируется датчиком положения 7 Этот переход обеспечивается тем, что в момент начала измерения микрокомпьютер 14 запускает одновременно генератор импульсов 18 и счетчик импульсов 19. Затем датчик положения 7 посылает импульс на микрокомпьютер 14 о положении физического тела 11. Микрокомпьютер 14, согласно заложенной программы, посылает сигнал на формирователь пилообразного тока 15 и далее на формирователь тока 20 для соленоида 9. Формирователь тока 20 меняет величину и направление тока подмагничивания на соленоид 9 при котором физическое тело 11 перейдет скачкообразно обратно в устойчивое положение покоя А, и т.д. Счетчик импульсов 19 каждый раз подсчитывает импульсы генератора 18 при переходе физического тела 11 при смене устойчивого положения покоя. Все данные, обеспечивающие смену устойчивого положения покоя, поступают в блок памяти 16 и через интерфейс 17 на внешние устройства пользователя. Значение количества импульсов, зафиксированное счетчиком 19 на момент срабатывания датчика положения однозначно связано с величиной протекающего через соленоид 9 тока в момент перехода и, следовательно, с измеряемой плотностью среды. Эта зависимость представляется в виде градуировочной характеристики. Формирователь тока 20 может использоваться для переключения шкалы измерения плотности для разных диапазонов значений плотности.
По полученной величине отсчетов счетчика импульсов 19 и известной градуировочной характеристике, хранящейся в блоке памяти 16, однокристальный микрокомпьютер 14 вычисляет искомое значение измеренной плотности среды. Одновременно блок управления 13 осуществляет измерение температуры среды при помощи датчика температуры 8. Измеренные значения плотности и температуры сохраняются в блоке памяти 16, и в дальнейшем доступ к этим данным осуществляется через интерфейс 17. Для работы устройства оно подключается к источнику питания, с устройством индикации состояния источника питания (например, аккумулятора) и схемой контроля процесса заряда-разряда.
Аналогично блок управления 13 будет работать при варианте, если вместо постоянного магнита его свойства обеспечиваются контуром с током подходящей конфигурации, который от микрокомпьютера 14 поступает на формирователь тока 22 для формирования магнитного поля подходящей конфигурации на катушке 23 с током. При этом токи на соленоиде 9 и катушке 23 не зависят друг от друга.
В этом случае вариант изготовления чувствительного элемента 5 вместо постоянного магнита 12 будет иметь катушку 23 с контуром для формирования магнитного поля подходящей конфигурации и сам датчик измерения плотности с этим чувствительным элементом 5 представляет вариант его реализации.
Реализация способа заключается в полном погружении физического тела с определенными массой, объемом и магнитными свойствами в измеряемую среду. Физическое тело должно обладать магнитными свойствами, что достигается либо намагничиванием самого вещества, из которого состоит тело, либо включением в состав его постоянных магнитов, катушек с током (соленоидов) с сердечником или без него, а также прочих контуров с током, различной конфигурации. В области расположения тела создается магнитное поле, характеристики которого изменяются контролируемым образом путем изменения физического параметра, например, тока, способного влиять на характеристики магнитного поля. Физическое тело монтируется на оси, которая не должна проходить ни через центр масс тела (ц.м.), ни через центр приложения результирующей выталкивающей архимедовой силы (ц.в.с.), действующей на тело со стороны измеряемой среды, в которую погружено физическое тело. Вначале, перед проведением измерения плотности среды, физическому параметру, контролирующему величину и направление внешнего магнитного поля, придают такое значение, чтобы погруженное в среду тело заняло некоторое устойчивое исходное положение, которое не должно зависеть от плотности среды во всем диапазоне измерения плотности. Расположение ц.м. тела и ц.в.с. тела относительно друг друга и относительно оси вращения физического тела, а также значения массы физического тела, его объем и магнитные свойства физического тела выбираются таким образом, чтобы при последующем изменении физического параметра, контролирующего величину и направление магнитного поля в месте расположения физического тела, исходное устойчивое положение покоя, в котором физическое тело находится перед измерением, теряло бы устойчивость при некотором значении этого параметра и физическое тело бы поворачивалось вокруг оси вращения, переходя скачкообразно в новое положение устойчивого покоя (т.е. в поведении тела имеет место триггерный эффект). При этом величина управляющего параметра, при котором происходит этот скачкообразный переход из одного устойчивого положения покоя в другое, находится во взаимно однозначной зависимости с плотностью среды, в которую погружено физическое тело, что позволяет определить плотность среды по градуировочной характеристики, как известному значению этого параметра, измеренному в момент скачкообразного перехода. Этот способ может осуществляться при измерении плотности среды в двух взаимно перпендикулярных плоскостях на одном уровне, т.е. когда оси осей подвеса 10 будут расположены в одной горизонтальной плоскости перпендикулярно друг другу. Это позволит компенсировать погрешности измерения плотности.
Таким образом, группа изобретений позволяет создать простые в употреблении и изготовлении приборы широкого спектра разнообразных измерительных устройств, спроектированных на основе чувствительных элементов, принцип действия которых основан на заявленном способе измерения плотности, и предназначенных для автоматизированного измерения и мониторинга плотности жидких и газовых сред на различных технических объектах и в ходе разнообразных технологических процессов. Обеспечить возможности измерения плотности в резервуарах одновременно по всей высоте имеющегося уровня жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| Устройство для измерения уровня и плотности жидкости | 2019 |
|
RU2710008C1 |
| Устройство для измерения уровня и плотности жидкости | 2020 |
|
RU2730404C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1995 |
|
RU2082151C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ | 2016 |
|
RU2652647C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1996 |
|
RU2095785C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ ЖИДКОСТИ | 2004 |
|
RU2273829C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ (ИЗМЕРЕНИЯ) ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ И ПЛОТНОМЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2270435C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
Группа изобретений относится к измерительной технике и может быть использовано для измерения плотности (в том числе локальной плотности) жидких сред и газовых сред. Способ измерения плотности заключается в полном погружении физического тела с определенными массой, объемом и магнитными свойствами в измеряемую среду и воздействии на него магнитным полем. Причем воздействие на физическое тело магнитным полем осуществляется в измеряемой среде в месте расположения тела. При этом величина и направление изменяются посредством контролируемого изменения физического параметра. Причем перед началом измерения значение этого физического параметра таково, что тело занимает положение устойчивого покоя во всем диапазоне измерения плотности, а по мере изменения вышеупомянутого физического параметра в процессе измерения, это положение покоя становится неустойчивым и тело скачкообразно переходит в новое положение устойчивого покоя при определенном значении этого физического параметра, регистрируемое в момент этого перехода. Причем однозначная функциональная зависимость в момент этого перехода между значением физического параметра и плотностью измеряемой среды позволяет определить значение плотности среды по зарегистрированному значению физического параметра. Техническим результатом изобретения является возможность измерения плотности в резервуарах по всей высоте имеющегося уровня жидкости и газов. 7 н.п. ф-лы, 2 ил.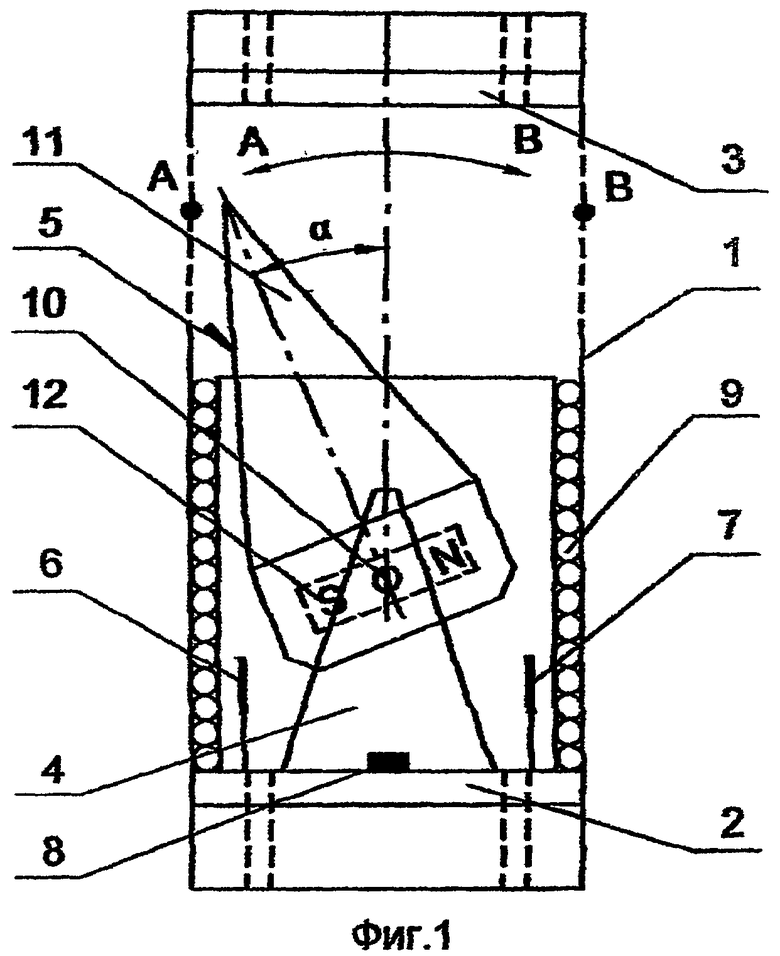
1. Способ измерения плотности, заключающийся в полном погружении физического тела с определенными массой, объемом и магнитными свойствами в измеряемую среду, и воздействие на него магнитным полем, отличающийся тем, что воздействие на физическое тело магнитным полем осуществляется в измеряемой среде в месте расположения тела, при этом величина и направление изменяются посредством контролируемого изменения физического параметра, причем перед началом измерения значение этого физического параметра таково, что тело занимает положение устойчивого покоя во всем диапазоне измерения плотности, а по мере изменения вышеупомянутого физического параметра в процессе измерения, это положение покоя становится неустойчивым и тело скачкообразно переходит в новое положение устойчивого покоя при определенном значении этого физического параметра, регистрируемое в момент этого перехода, причем однозначная функциональная зависимость, в момент этого перехода, между значением физического параметра и плотностью измеряемой среды позволяет определить значение плотности среды по зарегистрированному значению физического параметра.
2. Датчик измерения плотности, состоящий из чувствительного элемента, расположенного внутри перфорированного кожуха, к которому сверху и снизу прикреплены перфорированные нижний и верхний фланцы, отличающийся тем, что чувствительный элемент расположен сверху на нижнем фланце внутри соленоида вместе с датчиками положения чувствительного элемента и датчиком температуры.
3. Датчик измерения плотности (вариант), состоящий из чувствительного элемента, расположенного внутри перфорированного кожуха, к которому сверху и снизу прикреплены перфорированные нижний и верхний фланцы, при этом чувствительный элемент выполнен в виде катушки с контуром и расположен сверху на нижнем фланце внутри соленоида вместе с датчиками положения чувствительного элемента и датчиком температуры.
4. Чувствительный элемент датчика измерения плотности, состоящий из установленного на оси подвеса физического тела с постоянным магнитом, ось подвеса которого не проходит ни через центр масс физического тела (ц.м.), ни через центр выталкивающих сил (ц.в.с), отличающийся тем, что ось подвеса физического тела расположена ниже центра масс физического тела, снизу которого установлен постоянный магнит, имеющий определенную намагниченность, при этом физическое тело имеет возможность вращаться вокруг оси подвеса на угол λ, до соприкосновения с противоположными стенками перфорированного кожуха,
где угол λ - угол отклонения от одного до противоположного состояния устойчивого покоя чувствительного элемента относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через центр оси подвеса, в градусах.
5. Чувствительный элемент датчика измерения плотности (вариант), состоящий из установленного на оси подвеса физического тела с постоянным магнитом, ось подвеса которого не проходит ни через центр масс физического тела (ц.м.), ни через центр выталкивающих сил (ц.в.с), отличающийся тем, что ось подвеса физического тела расположена ниже центра масс физического тела, снизу которого установлен постоянный магнит в виде катушки с контуром для формирования магнитного поля подходящей конфигурации, при этом физическое тело имеет возможность вращаться вокруг оси подвеса на угол λ до соприкосновения с противоположными стенками перфорированного кожуха,
где угол λ - угол отклонения от одного до противоположного состояния устойчивого покоя чувствительного элемента относительно оси симметрии, находящейся в вертикальной плоскости и проходящей через центр оси подвеса, в градусах.
6. Блок управления датчика измерения плотности, состоящий из микрокомпьютера с формирователями тока соленоида, отличающийся тем, что в состав блока управления входят формирователь пилообразного тока с формирователем тока для соленоида, генератор импульсов со счетчиком импульсов, блок памяти и интерфейс с подключением на внешние устройства пользователя и через соединительную коробку с датчиками положения, а также датчиком температуры и соленоидом, подключенные к микрокомпьютеру и имеющие с ним обратные связи.
7. Блок управления датчика измерения плотности (вариант), состоящий из микрокомпьютера с формирователями тока соленоида, отличающийся тем, что в состав блока управления входят формирователь пилообразного тока с формирователем тока для соленоида, генератор импульсов со счетчиком импульсов, блок памяти и интерфейс с подключением на внешние устройства пользователя и через соединительную коробку с датчиками положения, а также датчиком температуры и соленоидом, подключенные к микрокомпьютеру и имеющие с ним обратные связи, при этом блок управления включает формирователь тока для формирования магнитного контура.
| Поплавковый датчик плотности | 1981 |
|
SU949411A1 |
| Устройство для измерения плотности жидкости | 1977 |
|
SU630557A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| Плотномер | 1983 |
|
SU1116358A1 |
| Толчея для измельчения материалов | 1948 |
|
SU77305A1 |
| DE 3338311 А1, 15.05.1985. | |||

