Предлагаемое изобретение относится к измерительной технике, а именно к способам контроля путем измерения амплитудно-частотных (динамических) характеристик (АЧХ) компенсационных маятниковых акселерометров на этапах их изготовления и исследования.
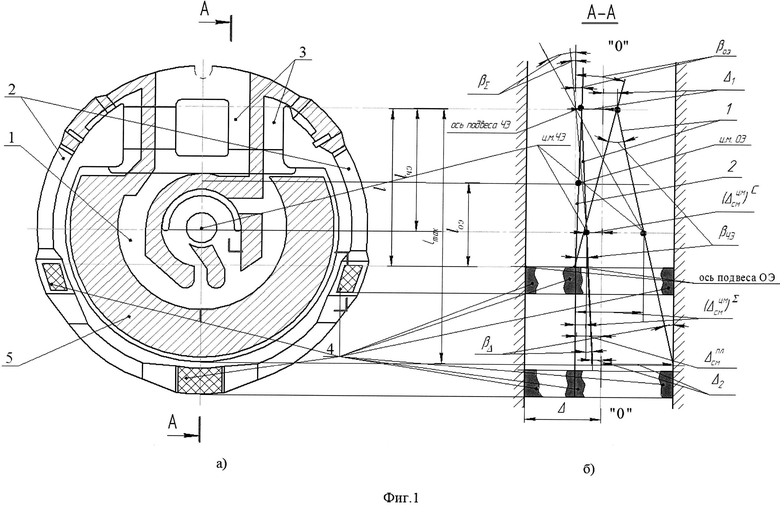
В высокоточных приборах, предназначенных для измерения линейных ускорений движущихся объектов, находит применение пластина маятникового акселерометра, приведенная на фиг. 1а, б. Пластина включает в себя опорный (ОЭ) и чувствительный (ЧЭ) подвижные элементы, выполненные из наиболее совершенного упругого материала, в частном случае, из кварцевого стекла.
На фиг.1а чувствительный элемент 1 (ЧЭ) и опорный элемент 2 (ОЭ) разделены прорезью вдоль периметра пластины; подвес ЧЭ выполнен в виде упругих перемычек 3, связующих ОЭ и ЧЭ; ОЭ фиксируется в корпусе акселерометра консольно на двухсторонних трех выступах 4, расположенных с противоположной оси подвеса ЧЭ стороне; датчик смещения центра масс ЧЭ (емкостной датчик угла) выполнен в виде двухсторонних металлизированных площадок 5, напыленных на ЧЭ пластины и корпус акселерометра; двухсторонние катушки (обмотки) датчика силы, прикрепленные на площадках 5 по ц.м. ЧЭ, взаимодействуют с постоянными магнитами, установленными на корпусе акселерометра.
Подвижные элементы пластины (фиг.1б) по способу нагружения подобны консольным балкам, работающим на изгиб, предельные значения угла поворота (рабочая зона) которых ограничены прочностью упругого подвеса ЧЭ и «заделки» (подвеса) ОЭ.
На фиг.1б введены обозначения:
βчэ, βоэ - угловая деформация ЧЭ и ОЭ, рад;
βΔ=βчэ-βоэ - положение оси чувствительности ЧЭ относительно корпуса акселерометра, рад;
βΣ=βчэ+ξβоэ - суммарная угловая деформация ЧЭ и ОЭ (подвижных элементов пластины), рад;



Kвх - коэффициент преобразования цепи обратной связи акселерометра до входа формирователя сигнала обратной связи;
Uсм - сигнал смещения на входе формирователя при измерении АЧХ;
Δ1 - смещение подвеса ЧЭ от линии «0-0», мкм;
Δ2 - смещение края ЧЭ от линии «0-0», мкм;
lmax - расстояние между краем ЧЭ и подвесом ЧЭ;
2Δ - расстояние между противоположными сторонами рабочей зоны, мкм.
В отсутствие контроля полосы пропускания выходного сигнала акселерометра и амплитудно-частотной характеристики (АЧХ) колебаний центра масс чувствительного элемента (ц.м. ЧЭ) возможно, при эксплуатации, касание края ЧЭ (ц.м. ЧЭ) корпуса акселерометра и, следовательно, с учетом ограниченной прочности ЧЭ, появление на выходе ложного сигнала.
Известен способ контроля маятникового поплавкового компенсационного акселерометра, описанный в [1]. Способ осуществляется путем измерения выходных сигналов, коэффициента преобразования и положения измерительной оси акселерометра до и после механических воздействий. При этом устанавливают прибор маятником вниз, а механические воздействия проводят при разорванной обратной связи путем подачи в обмотку моментного датчика переменного тока с частотой собственных колебаний подвижной системы.
Способ [1], в отсутствие вибростенда и дополнительной обмотки, исключает измерение динамических характеристик при замкнутой обратной связи акселерометра.
Известен способ измерения динамических характеристик компенсационного акселерометра, принятый за прототип и описанный в [2].
Способ заключается в том, что через гальваническую развязку в датчик силы чувствительного элемента подают синусоидальный калиброванный по амплитуде и частоте электрический сигнал. По отношению амплитуды выходного сигнала датчика смещения ЧЭ и формирователя сигнала аналоговой обратной связи к амплитуде калиброванного электрического сигнала определяют динамическую характеристику акселерометра. При этом датчик силы через конденсатор развязан от источника синусоидального сигнала.
Недостатком способа, описанного в [2], является наличие ограничения на внутреннее сопротивление формирователя для снижения искажений результатов измерений из-за паразитного влияния источника на работу акселерометра.
Задачей изобретения является снижение искажений при измерении амплитудно-частотных (динамических) характеристик акселерометра с одним датчиком силы.
Технический результат достигается тем, что в датчик силы акселерометра подают синусоидальный, калиброванный по амплитуде и частоте, электрический сигнал и по отношению амплитуды сигналов со стороны входа и выхода формирователя сигнала обратной связи к амплитуде подаваемого сигнала определяют динамические характеристики акселерометра, при этом:
по первому варианту с цифровым устройством обратной связи: подают сигнал Uг в датчик силы, либо через эталонную нагрузку, либо через дополнительный вход усилителя мощности цифрового устройства обратной связи, соединяя свободный вывод эталонной нагрузки с общей шиной, а сигналы Uсм и Uвых измеряют соответственно со стороны выходов следующих элементов цифрового устройства обратной связи: усилителя-преобразователя и интегро-дифференциирующего усилителя;
по второму варианту с аналоговым устройством обратной связи: подают сигнал Uг в датчик силы через эталонную нагрузку, а сигнал Uвых измеряют со стороны выхода интегро-дифференциирующего усилителя устройства обратной связи и подают на активный фильтр, с выхода которого измеряют выходной сигнал 
Предлагаемый способ измерения динамических характеристик кварцевого маятникового акселерометра имеет следующие преимущества:
- повышается точность измерения динамических характеристик акселерометра с одним датчиком силы, при этом не регламентируется выходное сопротивление формирователя;
- возможно исследование акселерометров как с аналоговой, так и с цифровой обратной связью.
Предлагаемый способ измерения параметров акселерометра предусматривает проведение следующих операций:
в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные по амплитуде и частоте, электрические сигналы Uг, для всего требуемого диапазона частот и амплитуд сигналов Uг измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых устройства обратной связи и по отношению амплитуд выходных сигналов к амплитуде сигнала Uг определяют динамические характеристики акселерометра,
- по первому варианту способа подают сигнал Uг в датчик силы либо через эталонную нагрузку, либо через дополнительный вход усилителя мощности цифрового устройства обратной связи, соединяя свободный вывод эталонной нагрузки с общей шиной, а сигналы Uсм и Uвых измеряют соответственно со стороны выходов следующих элементов цифрового устройства обратной связи: усилителя-преобразователя и интегро-дифференциирующего усилителя;
- по второму варианту способа подают сигнал Uг в датчик силы через эталонную нагрузку, а сигнал Uвых измеряют со стороны выхода интегро-дифференциирующего усилителя аналогового устройства обратной связи и подают на активный фильтр, с выхода которого измеряют выходной сигнал
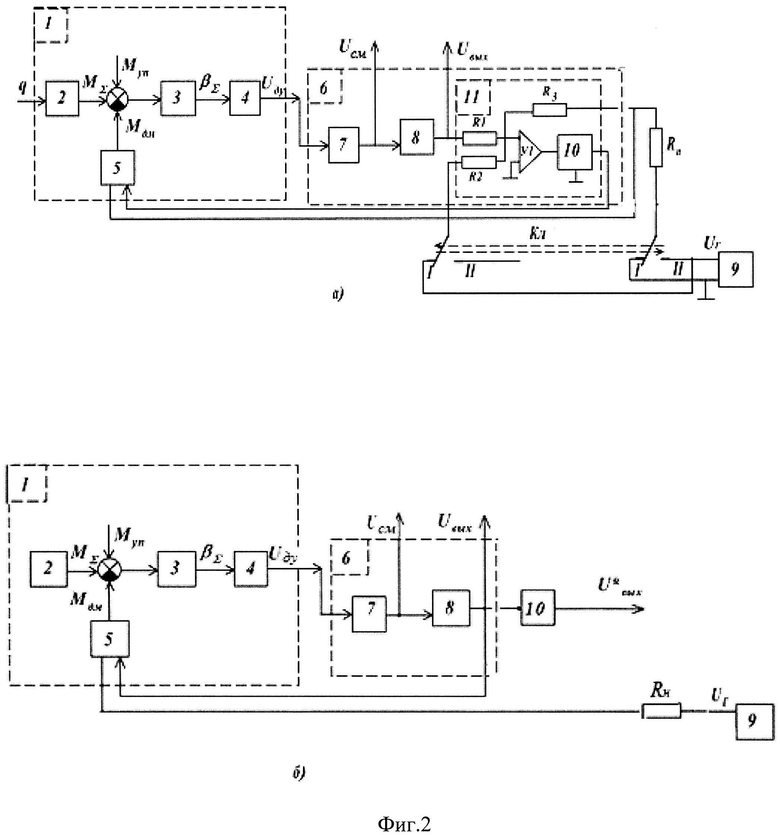
На фиг.2а, б приведены устройства для реализации предлагаемого способа определения динамических параметров пластины кварцевого маятникового акселерометра.
На фиг.2а, б введены обозначения:
1 - пластина маятникового акселерометра;
2 - воспринимающая часть пластины;
3 - подвижная часть пластины;
4 - датчик смещения ц.м. ЧЭ;
5 - магнитоэлектрический датчик силы;
6 - устройство обратной связи (формирователь сигнала обратной связи);
7 - предварительный усилитель-преобразователь (последовательно соединенные предварительный усилитель и фазочувствительный выпрямитель);
8 - устройство коррекции сигнала обратной связи (интегро-дифференцирующий корректирующий контур, в частном случае, с эмиттерным повторителем по схеме Дарлингтона на выходе);
9 - источник синусоидального сигнала, калиброванного по амплитуде и частоте;
Mдм - момент датчика силы 5;
MΣ - суммарный момент дебаланса и тяжения пластины;
Mуп - упругий момент при угловой деформации подвижной части пластины;
βΣ - суммарная угловая деформация подвижной части пластины.
На фиг.2а дополнительно введены обозначения:
10 - эмиттерный повторитель по схеме Дарлингтона;
11 - суммирующий усилитель мощности;
Кл. - коммутатор сигнала Uг.
На фиг.2б дополнительно введены обозначения:
10 - активный фильтр
Подвижная часть 3 связана с датчиком 4, выход которого через устройство обратной связи (формирователь сигнала обратной связи) 6 связан с входным выводом датчика силы.
Устройство 6 для осуществления первого варианта способа содержит цепь из последовательно соединенных предварительного усилителя-преобразователя 7, устройства 8 и усилителя мощности 11. Усилитель мощности 11 содержит усилитель У1, инвертирующим входом через резистор R1 соединенный с выходом устройства 8. Выход усилителя У1 через усилитель 10 (эмитерный повторитель по схеме Дарлингтона) соединен с началом обмотки датчика 5, конец которой соединен через эталонную нагрузку Rн либо с общей шиной (при положении I коммутатора), либо с выходом источника 9 (при положении II коммутатора), а также через резистор R3 с инвертирующим входом усилителя У1. Устройство обратной связи исполнено на микросхеме и является цифровым (выполнено на базе процессора с ЦАП на выходе, при этом в усилитель-преобразователь вводится АЦП).
Устройство 6 для осуществления второго варианта способа является аналоговым и содержит цепь из последовательно соединенных предварительного усилителя-преобразователя 7, устройства 8. Усилитель мощности не используется. Выход устройства 8 связан с началом обмотки датчика момента, конец которой соединен через эталонную нагрузку Rн с выходом источника 9. Выход устройства 8 связан с входом активного фильтра 10.
На фиг.2а при нахождении Кл. в положении I подача Uг осуществляется на дополнительный вход усилителя мощности 11 (на инвертирующий вход усилителя У1 через резистор R2) или на эталонную нагрузку Rн (на фиг.2а Кл. в положении II).
На фиг.2б подача сигнала Uг осуществляется на эталонную нагрузку Rн. Измеряют сигналы Uсм, Uвых и
Сущность предлагаемого способа определения амплитудно-частотной характеристики (АЧХ) колебаний ц.м. ЧЭ и выходного сигнала акселерометра состоит в следующем.
Известно [2], что при воздействии на акселерометр виброускорения в режиме полета или при задании его при помощи вибростенда в условиях испытаний, АЧХ «угол колебаний ц.м. ЧЭ - ускорение» и «выходной сигнал - ускорение» можно определить из передаточных функций 



Здесь W2(s)÷W8(s) - передаточные функции звеньев 2÷8 на фиг.2а, б, при этом:
- коэффициент преобразования цепи «сигнал Uсм - смещение ц.м. ЧЭ» соответствует выражению
Kвх=W4(s)*W7(s),
- ток iдм через обмотки датчика силы определяется из формулы iдм=W11(s)*Uвых,
- если формирователь 6 содержит усилитель мощности 11 (фиг.2а), тогда 
- если формирователь 6 не содержит усилитель мощности 11 (фиг.2б), тогда 
При подаче сигнала с источника 9 на дополнительный вход формирователя 6, АЧХ «угол колебаний ц.м. ЧЭ - задаваемый сигнал имитации» и «выходной сигнал - задаваемый сигнал имитации» можно определить из передаточных функций


При подаче сигнала с источника 9 в датчик силы через эталонную нагрузку Rн (фиг.2а) АЧХ «угол колебаний ц.м. ЧЭ - задаваемый сигнал имитации» и «выходной сигнал - задаваемый сигнал имитации» можно определить из передаточных функций


где 
При подаче сигнала с источника 9 в датчик силы через эталонную нагрузку Rн по фиг.26 АЧХ «угол колебаний ц.м. ЧЭ - задаваемый сигнал имитации» и «выходной сигнал - задаваемый сигнал имитации» можно определить из передаточных функций


где 

В достаточно широком диапазоне частот вибровоздействий звено 2, датчик силы 5 и предусилитель 7, описываемые передаточными функциями W2(s), W5(s) и W7(s), а также передаточные функции W11(s), 

Следовательно, частотные характеристики, соответствующие передаточным функциям 










где q - амплитуда имитируемого ускорения,

АЧХ амплитуды смещения (колебаний) ц.м. ЧЭ, при измерении сигнала Uсм со стороны входа формирователя 6, определяется по формуле:
При оптимальном значении Kвх предусилитель 7 не должен быть в насыщении до момента касания края ЧЭ (ц.м. ЧЭ) корпуса акселерометра.
Предлагаемый способ в отличие от прототипа применим для акселерометров, у которых не регламентируется противоречивое соотношение внутренних сопротивлений датчика 5 и формирователя 6 (в прототипе требуется на порядок больше).
Результаты измерений могут быть искажены при подаче сигнала Uг на нагрузку с маломощного источника 9 с внутренним сопротивлением, соизмеримым с нагрузкой.
Подавая на дополнительный вход формирователя 6 или в датчик силы через эталонную нагрузку синусоидальный калиброванный сигнал Uг с амплитудой, выбранной по выражению (**), измеряя сигналы Uсм, Uвых и 

Передаточная функция Ф(s) акселерометра, характеризующая показатель колебательности: Ф(s)=Wзамк/(1+Wразомк)=Uвых/Uг, где Wзамк, разомк - передаточные функции соответственно замкнутой и разомкнутой системы акселерометра.
При оценке полосы пропускания акселерометра для сигнала

Таким образом, заявлено:
1. Способ измерения динамических характеристик кварцевого маятникового акселерометра, заключающийся в том, что в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные по амплитуде и частоте, электрические сигналы Uг, для всего требуемого диапазона частот и амплитуд сигналов измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых устройства обратной связи сигналы и по отношению их амплитуд к амплитуде сигнала Uг определяют динамические характеристики акселерометра. Отличительная особенность способа заключается в том, что подают сигнал Uг в датчик силы либо через эталонную нагрузку, либо через дополнительный вход усилителя мощности цифрового устройства обратной связи, соединяя свободный вывод эталонной нагрузки с общей шиной, а сигналы Uсм и Uвых измеряют соответственно со стороны выходов следующих элементов цифрового устройства обратной связи: усилителя-преобразователя и интегро-дифференциирующего усилителя.
2. Способ измерения динамических характеристик кварцевого маятникового акселерометра, заключающийся в том, что в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные по амплитуде и частоте, электрические сигналы Uг, для всего требуемого диапазона частот и амплитуд сигналов Uг измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых аналогового устройства обратной связи и по отношению амплитуд выходных сигналов к амплитуде Uг определяют динамические характеристики акселерометра. Отличительная особенность способа заключается в том, что подают сигнал Uг в датчик силы через эталонную нагрузку, а сигнал Uвых измеряют со стороны выхода интегро-дифференциирующего усилителя устройства обратной связи и подают на активный фильтр, с выхода которого измеряют выходной сигнал
Источники информации
1. SU 1840726 A1. Опубл. 27.07.08.
2. SU 1839835 A1. Опубл. 10.08.05.
3. Распопов В.Я. Микромеханические приборы. - М.: Машиностроение. 2007.
4. Алексеенко А.Г., Шагурин И.И. Микросхемотехника. - М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2377508C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 1997 |
|
RU2147751C1 |
| БЕЗДЕМОНТАЖНЫЙ СПОСОБ ПОВЕРКИ ВИБРОАКУСТИЧЕСКИХ ПРИЕМНИКОВ | 2013 |
|
RU2538034C9 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2132559C1 |
| Маятниковый компенсационный акселерометр | 1985 |
|
SU1278731A1 |
Изобретение относится к измерительной технике и может быть использовано для определения параметров кварцевых маятниковых акселерометров. Согласно заявленному способу в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные сигналы Uг. Для всего требуемого диапазона частот и амплитуд сигналов Uг измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых устройства обратной связи и по отношению их амплитуд к амплитуде сигнала Uг определяют динамические характеристики акселерометра. По первому варианту подают сигнал Uг в датчик силы либо через эталонную нагрузку, либо через дополнительный вход усилителя мощности цифрового устройства обратной связи, соединяя свободный вывод эталонной нагрузки с общей шиной, а сигналы Uсм и Uвых измеряют соответственно со стороны выходов следующих элементов цифрового устройства обратной связи: усилителя-преобразователя и интегро-дифференциирующего усилителя. По второму варианту подают сигнал Uг в датчик силы через эталонную нагрузку, а сигнал Uвых измеряют со стороны выхода интегро-дифференциирующего усилителя устройства обратной связи и подают на активный фильтр, с выхода которого измеряют выходной сигнал
1. Способ измерения динамических характеристик кварцевого маятникового акселерометра, заключающийся в том, что в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные по амплитуде и частоте, электрические сигналы Uг, для всего требуемого диапазона частот и амплитуд сигналов Uг измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых устройства обратной связи и по отношению их амплитуд к амплитуде сигнала Uг определяют динамические характеристики акселерометра, отличающийся тем, что подают сигнал Uг в датчик силы либо через эталонную нагрузку, либо через дополнительный вход усилителя мощности цифрового устройства обратной связи, соединяя свободный вывод эталонной нагрузки с общей шиной, а сигналы Uсм и Uвых измеряют соответственно со стороны выходов следующих элементов цифрового устройства обратной связи: усилителя-преобразователя и интегро-дифференциирующего усилителя.
2. Способ измерения динамических характеристик кварцевого маятникового акселерометра, заключающийся в том, что в одну из точек замкнутого контура акселерометра подают синусоидальные, калиброванные по амплитуде и частоте, электрические сигналы Uг, для всего требуемого диапазона частот и амплитуд сигналов Uг измеряют выходной сигнал смещения Uсм и выходной сигнал Uвых аналогового устройства обратной связи и по отношению амплитуд выходных сигналов к амплитуде Uг определяют динамические характеристики акселерометра, отличающийся тем, что подают сигнал Uг в датчик силы через эталонную нагрузку, а сигнал Uвых измеряют со стороны выхода интегро-дифференциирующего усилителя устройства обратной связи и подают на активный фильтр, с выхода которого измеряют выходной сигнал
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839835A1 |
| СПОСОБ КОНТРОЛЯ МАЯТНИКОВОГО ПОПЛАВКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1840726A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНОСТИ ВЫХОДНОЙ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРА | 2009 |
|
RU2398242C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА С КОРРЕКТИРУЮЩИМИ ЗВЕНЬЯМИ | 1988 |
|
RU1579231C |
| JP 4038472 A , 07.02.1992 | |||

