Область техники, к которой относится изобретение
Изобретение относится к области автоматизированных устройств кардиопульмональной реанимации и, более конкретно, к управлению исполнительным механизмом сжатия грудной клетки.
Уровень техники
Кардиопульмональная реанимация (CPR) является хорошо известным способом повышения шанса выживания при остановке сердца. Однако, выполнять надлежащим образом высококачественную ручную кардиопульмональную реанимацию очень трудно. Поскольку качество CPR является ключевым моментом для выживания, механическое автоматизированное устройство должно иметь мощный исполнительный механизм, заменяющий собой менее надежные и длительные сжатия грудной клетки. С недавнего времени на рынке появились автоматизированные системы CPR ("А-CPR").
Некоторые системы А-CPR используют механизм пневматического исполнительного механизма, тогда как другие системы А-CPR приводятся в действие электрическим двигателем, таким как серводвигатель. Публикация патентной заявки США US 2007/0270724 А1 описывает серводвигатель для CPR, отличающийся управлением формой сигнала сжатия, прилагаемой к пациенту. С этой целью, US 2007/0270724 А1 предлагает регулировать форму сигнала в заданной точке. Это ведет к улучшенной терапии, относящейся как к кровотоку, так и к предотвращению внутренних травм, потому что заданная форма сигнала может быть выбрана относительно близкой к верхним пределам, которые никогда не должны превышаться.
Обычно серводвигатель и его управление используют упреждающую часть (характеризующуюся тем, насколько хорошо исполнительный механизм следует задаваемым командам движения, то есть, сигналу, посылаемому на двигатель заранее, чтобы получать точное отслеживание), и часть управления возмущениями (характеризующуюся подавлением возмущений, то есть, отклонений от заданного движения, то есть, (случайных) отклонений от движения, задаваемого командой). Упреждающая часть управления оценивается зависимостью от времени силы привода (или, в данном случае, тока или напряжения), которая необходима, чтобы, насколько возможно, следовать заданному движению (то есть, в пределах средней или максимальной ошибки). В традиционных способах сервоуправления упреждающее управление вычисляется один раз и требуется подробная модель системы и сервосистемы. Для автоматизированной кардиопульмональной реанимации эта часть должна приближенно определяться для каждого пациента и может иметь большой разброс оценок. Наиболее часто используемой реализацией для подавления возмущений серводвигателя/ сервоуправления является так называемое пропорционально-интегрально-дифференциальное (PID) управление. Установка коэффициентов усиления пропорциональной (Р), интегрирующей (I) и дифференциальной (D) частей является непростым делом, поскольку слишком высокие коэффициенты усиления могут привести к неустойчивости, и может потребоваться значительное время, чтобы оптимизировать коэффициенты усиления таким образом, чтобы возмущение подавлялось, в то же время избегая недорегулирования и перерегулирования.
Сущность изобретения
Использование серводвигателя для автоматизированной CPR на людях и животных является непростым делом из-за различий и переменчивости во время CPR свойств груди человека под действием механической нагрузки. Во-первых, вязкоупругое поведение груди человека является очень сложным и нелинейным, из-за чего отсутствует точная модель груди конкретного пациента. Кроме того, существует большая изменчивость вязкоупругих свойств у разных людей; это должно учитываться, так как форма сигнала сжатия должна быть идентичной для различных пациентов. Перерегулирование (то есть, более глубокие сжатия, чем желательно) может быть очень опасным и вызвать смертельное повреждение тела. Также известно, что вязкоупругие свойства тела изменяются во время CPR (то есть, грудь становится менее жесткой). Наконец, существует очень мало времени для оптимизации PID-установок и оценки упреждающего управления, так как во время реанимации счет идет на секунды.
В отношении настоящего изобретения было обнаружено, что механическая система, содержащая грудную клетку пациента и исполнительный механизм сжатия грудной клетки, подвергается значительным изменениям, зависящим, например, от роста пациента, местоположения исполнительного механизма и различных прочих факторов. Механическая система имеет, по меньшей мере, второй порядок, что означает, что она способна к колебаниям. Механическая система также подвержена перерегулированию. Если эти свойства механической системы не учитываются должным образом, колебания и/или перерегулирование могут достигать опасной близости к допустимому пределу или даже превысить эти пределы. Большое беспокойство вызывают травмы грудной клетки и груди (сломанные ребра, разрыв внутренних органов грудины). Уменьшение формы сигнала в заданной точке до установки, которое приводит в результате к реакции системы с достаточным запасом между перерегулированием и допустимыми пределами, является одним из вариантов выбора. Однако, при этом действие по сжатию грудной клетки не столь эффективно, как могло бы быть. Дополнительно, даже малое перерегулирование и колебания могут приводить к соответствующей нерегулярности кровотока пациента и поэтому отрицательно влиять на перфузию крови.
Механические свойства груди и грудной клетки обладают большим разнообразием в зависимости от роста пациента. Механические свойства могут изменяться весьма значительно даже во время выполнения кардиопульмональной реанимации: грудь становится менее жесткой и полная релаксация грудной клетки уже не возникает.
Было бы желательно получить в результате автоматизированное устройство кардиопульмональной реанимации, которое уменьшает или даже исключает перерегулирование и колебания при движении сжатия грудной клетки, независимо от динамического поведения механической системы исполнительный механизм - грудная клетка. Также было бы желательно получить в результате автоматизированное устройство кардиопульмональной реанимации, которое адаптируется к изменениям в динамическом поведении механической системы, содержащей грудную клетку пациента и исполнительный механизм сжатия грудной клетки.
Чтобы лучше решить одну или более из этих проблем, в первом варианте изобретения представляется автоматизированное устройство кардиопульмональной реанимации, содержащее исполнительный механизм сжатия грудной клетки, привод исполнительного механизма, подающий меняющиеся во времени приводные сигналы на исполнительный механизм сжатия грудной клетки в зависимости от рабочих параметров привода исполнительного механизма, причем рабочие параметры определяют динамическое поведение системы, содержащей исполнительный механизм сжатия грудной клетки и грудную клетку пациента, датчик физиологического параметра, обеспечивающий подачу измеренных значений физиологического параметра, связанного с функционированием исполнительного механизма сжатия грудной клетки, и устройство адаптивного управления для рабочих параметров привода исполнительного механизма, причем устройство адаптивного управления принимает измеренные значения и оценивает их в отношении соответствия заданным условиям.
Чтобы лучше решить одну или более упомянутых выше проблем, во втором варианте изобретения представлен способ автоматизированной кардиопульмональной реанимации, содержащий этапы, на которых:
a) устанавливают безопасные начальные значения рабочих параметров, определяющих динамическое поведение системы, содержащей грудную клетку пациента и исполнительный механизм сжатия грудной клетки автоматизированного устройства кардиопульмональной реанимации,
b) автоматизированным устройством кардиопульмональной реанимации выполняют, по меньшей мере, одно сжатие грудной клетки,
c) получают измеренное значение физиологического параметра, связанного с реанимацией,
d) оценивают измеренное значение в отношении соответствия заданным условиям,
e) изменяют рабочие параметры в соответствии со схемой адаптивного управления, используя результат оценки измеренного значения.
Чтобы лучше решить одну или более из упомянутых выше проблем, в третьем варианте изобретения представлен сигнал, переданный от устройства адаптивного управления на привод исполнительного механизма автоматизированного устройства кардиопульмональной реанимации. Сигнал содержит команды для привода исполнительного механизма, чтобы изменять рабочие параметры, определяющие динамическое поведение системы, содержащей грудную клетку пациента и исполнительный механизм сжатия грудной клетки автоматизированного устройства кардиопульмональной реанимации.
Чтобы лучше решить одну или более упомянутых выше проблем, в четвертом варианте изобретения представлена компьютерная программа, позволяющая процессору выполнять способ, соответствующий третьему варианту изобретения.
Различные варианты осуществления изобретения могут решить один или несколько из следующих проблем:
Очень точное следование произвольному (реальному) перемещению в зависимости от форм сжатия во времени для широкого диапазона пациентов (соответствующее и не имеющее отклонений во время CPR).
Имитация самых известных (ручных) форм волн сжатия для CPR.
Точная механическая модель груди человека (под нагрузкой) не требуется ни в каких вариантах осуществления.
Сервоуправление является адаптивным, то есть, автоматически следует за изменениями в нагрузке (то есть, нагрузке на тело).
Сервосистема автоматически регулируется для различных размеров, веса и свойств пациента.
Время настройки очень короткое, потому что процедура автоматизирована.
Позволяет персонализацию CPR для пациента, используя механический параметр(ы) пациента при запуске и во время CPR (в том числе, использование этих параметров в контуре обратной связи).
За счет тщательного управления глубиной и формой сжатия, повреждения груди и внутренних органов могут быть сведены до минимума.
Процедура запуска оптимизирована для избежания/минимизации повреждения тела, связанного с CPR.
Дополнительно, должно быть желательно обеспечить автоматизированное устройство кардиопульмональной реанимации, способное реагировать на возмущения, влияющие на реакцию механического устройства. В варианте осуществления эта проблема решается приводом исполнительного механизма, содержащим контроллер, принимающий измеренные значения и соответствующее заданное значение и формирующим сигналы управления замкнутого контура для исполнительного механизма сжатия грудной клетки. Было бы желательно изменять рабочие параметры, которые могут легко изменяться и имеют определенную степень влияния на динамическое поведение или реакцию механической системы. В варианте осуществления эта проблема решается так, что рабочие параметры привода исполнительного механизма, подвергающегося адаптивному управлению, содержат, по меньшей мере, одно из коэффициента усиления контроллера и заданного значения.
Было бы желательно обеспечить автоматизированное устройство кардиопульмональной реанимации, позволяющее безопасную, полезную и быструю оценку динамического поведения механической системы. В варианте осуществления одна или более этих проблем решаются адаптивным управлением, содержащим итерационное обучающееся управление, которое принимает измеренные значения и соответствующее заданное значение и формирует сигналы управления для исполнительного механизма сжатия грудной клетки итерационным способом, основываясь на предшествующем сигнале управления и разности между измеренным значением и заданным значением.
Было бы желательно, чтобы итерационное обучающееся управление сходилось к решению, гарантирующему высокую степень соответствия между фактическим выходным сигналом механической системы исполнительного механизма для грудной клетки и заданной формой сигнала. В варианте осуществления эта проблема решается с помощью разности между измеренным значением и заданным значением, дифференцированной по времени. Результат дифференцирования имеет тенденцию стремиться к нулю, поскольку разность между измеренным значением и заданным значением становится все более и более постоянной.
Было бы желательно, чтобы итерационное обучающееся управление было устойчивым. Эта проблема решается итерационным обучающимся управлением, определяемым в соответствии с законом итерационного обучения следующим образом:
uk+l(t)=uk(t)+γ 
где uk(t) - сигнал управления для исполнительного механизма сжатия грудной клетки во время текущего интервала времени,
uk+1(t) - сигнал управления для исполнительного механизма сжатия грудной клетки во время последующего интервала времени,
γ - итерационный коэффициент усиления при обучении,
ek - разность между заданным значением и измеренным значением.
Стабильность может достигаться для соответствующих значений γ.
Было бы желательно достигнуть управления исполнительным механизмом сжатия грудной клетки внутри автоматизированного устройства кардиопульмональной реанимации, которое уменьшает или даже исключает перерегулирование и колебания при движении сжатия грудной клетки, независимо от динамического поведения механической системы исполнительного механизма для грудной клетки. Также было бы желательно добиться управления исполнительным механизмом сжатия грудной клетки в пределах автоматизированного устройства кардиопульмональной реанимации, которое адаптирует действие исполнительного механизма к изменениям в динамическом поведении механической системы, содержащей грудную клетку пациента и исполнительный механизм сжатия грудной клетки.
Чтобы лучше решить одну или более из этих проблем, в дальнейшем варианте изобретения предлагается сигнал, переданный от устройства адаптивного управления к приводу исполнительного механизма автоматизированной системы кардиопульмональной реанимации. Сигнал содержит команды для привода исполнительного механизма, чтобы изменять рабочие параметры, определяющие динамическое поведение системы, содержащей грудную клетку пациента и исполнительный механизм сжатия грудной клетки автоматизированного устройства кардиопульмональной реанимации.
В дополнительном варианте изобретения предлагается компьютерный программный продукт, позволяющий процессору выполнять способ, описанный выше.
Основная идея состоит в том, чтобы учесть меняющееся динамическое поведение исполнительного механизма для грудной клетки механической системы. Тем не менее, теоретическая модель механической системы не требуется. Автоматизированная кардиопульмональная реанимация должна начинаться мягко, чтобы избежать повреждения груди. Здесь важен адаптивный коэффициент усиления установок контроллера (то есть, не используйте вначале слишком высокие коэффициенты усиления, изменяйте коэффициент усиления во время реанимации). Необходима достоверная оценка входного упреждающего сигнала сервосистемы. Адаптивная оптимизация кардиопульмональной реанимации посредством итерационного обучающегося управления, осуществляемого частью упреждающего управления, может способствовать удовлетворительным рабочим характеристикам системы. Рекомендуемый импульс сжатия должен отслеживаться очень точно, в противном случае может произойти тяжелое повреждение тела или пониженная перфузия. Кроме того, адаптивность и самообучение системы для среды CPR в настоящее время не очень хорошо изучены.
Эти и другие варианты изобретения станут очевидны и будут объяснены со ссылкой на вариант(-ы) осуществления, описанный здесь далее.
Краткое описание чертежей
Фиг.1 - автоматизированное кардиопульмональное реанимационное устройство, соответствующее первому варианту изобретения.
Фиг.2 - автоматизированное кардиопульмональное реанимационное устройство, соответствующее второму варианту изобретения.
Фиг.3 - блок-схема последовательности выполнения операций способа для автоматизированной кардиопульмональной реанимации в соответствии с первым вариантом изобретения.
Фиг.4 - блок-схема последовательности выполнения операций способа для автоматизированной кардиопульмональной реанимации в соответствии со вторым вариантом изобретения.
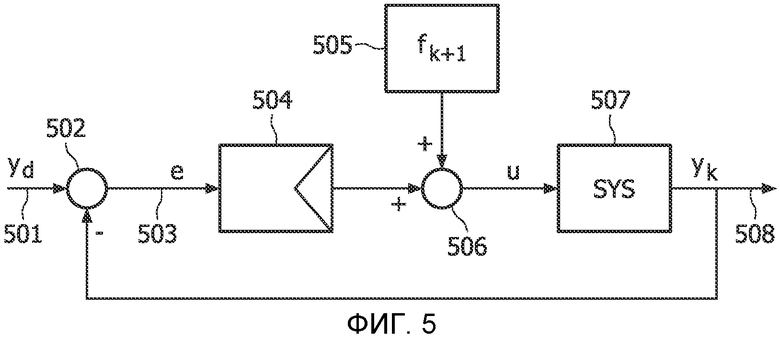
Фиг.5 - схема управления системы с серводвигателем.
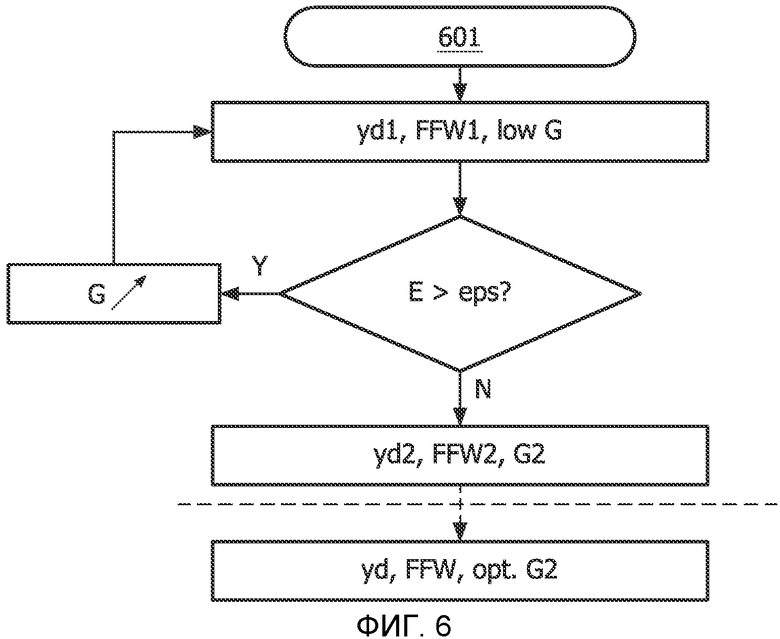
Фиг.6 - блок-схема последовательности выполнения операций запуска автоматизированной кардиопульмональной реанимации с адаптивным PID-управлением.
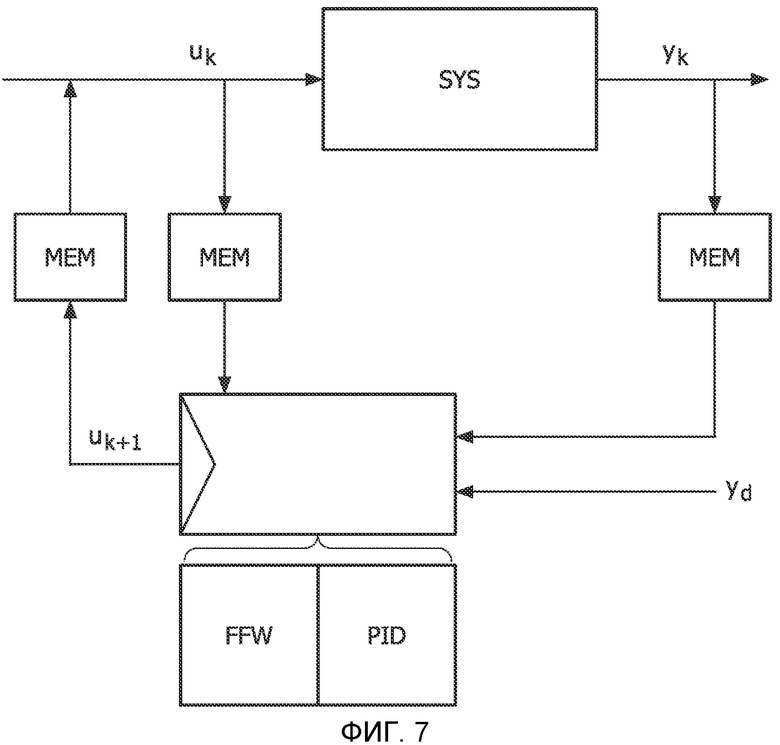
Фиг.7 - схема управления итерационной системой обучающегося управления (ILC).
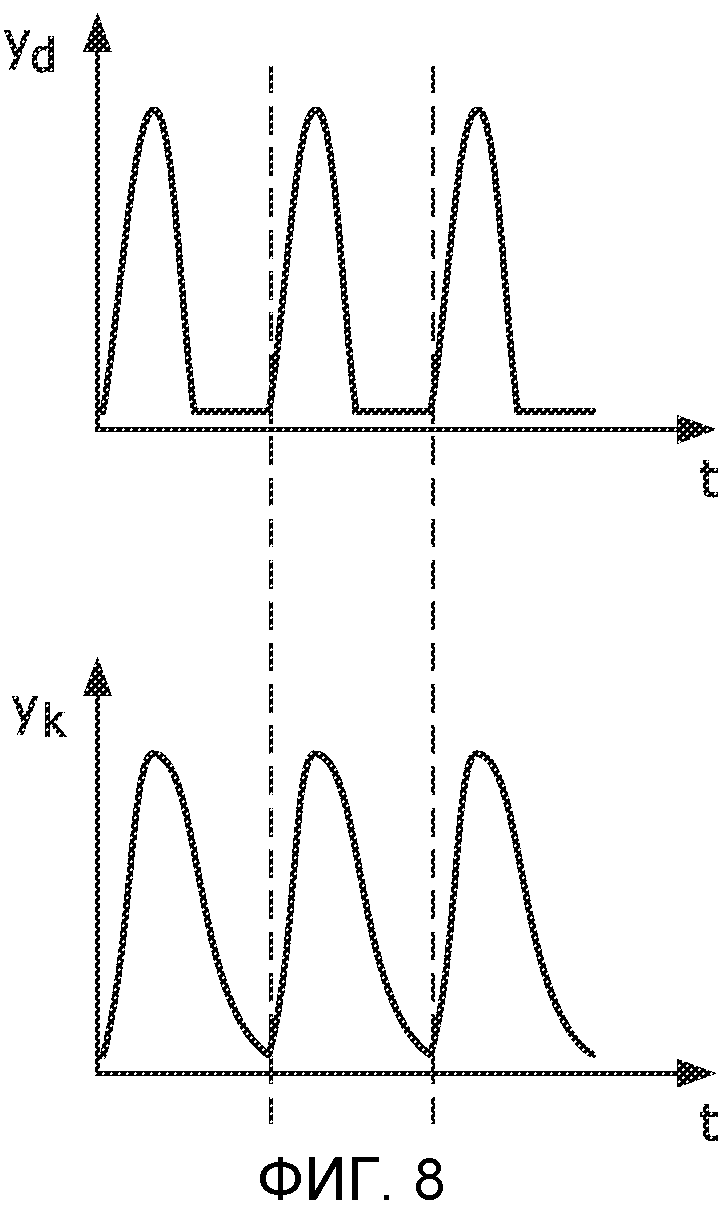
Фиг.8 - две временные диаграммы заданной формы сигнала сжатия и фактическая форма сигнала сжатия в случае PID-контроллера, имеющего низкое пропорциональное усилие.
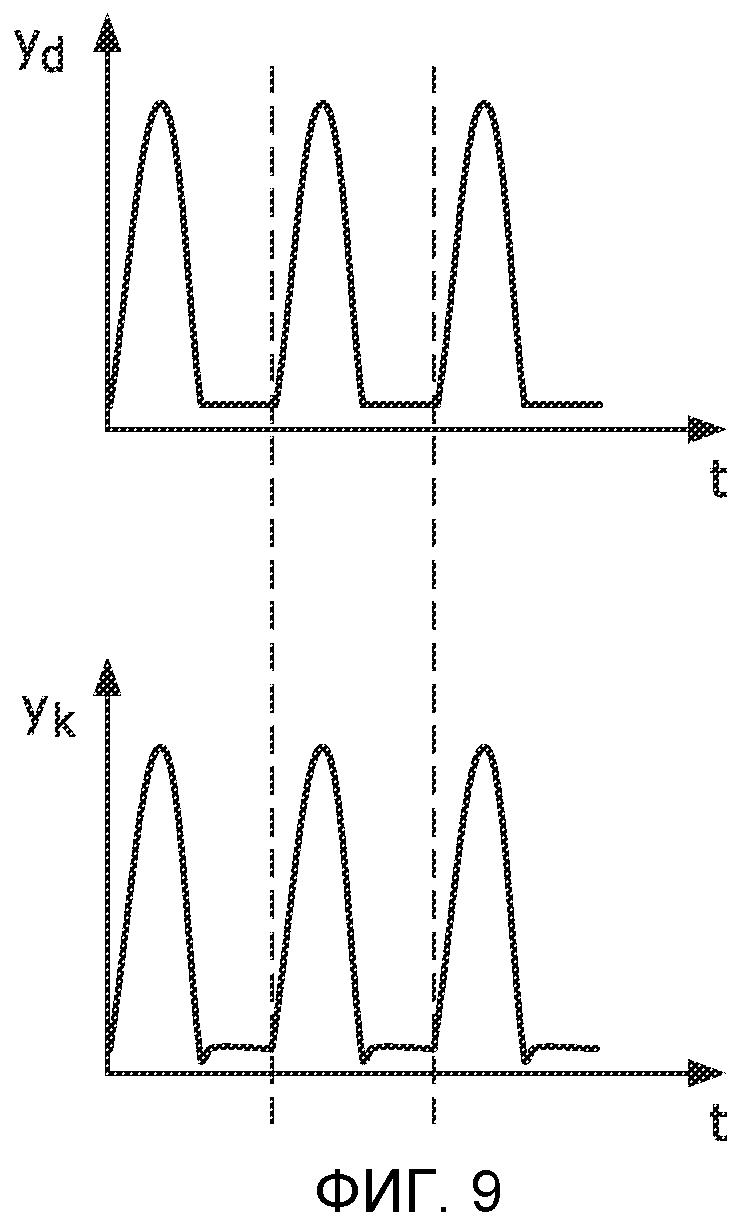
Фиг.9 - две временные диаграммы заданной формы сигнала сжатия и фактической формы сигнала сжатия в случае PID-контроллера, имеющего высокое пропорциональное усилие.
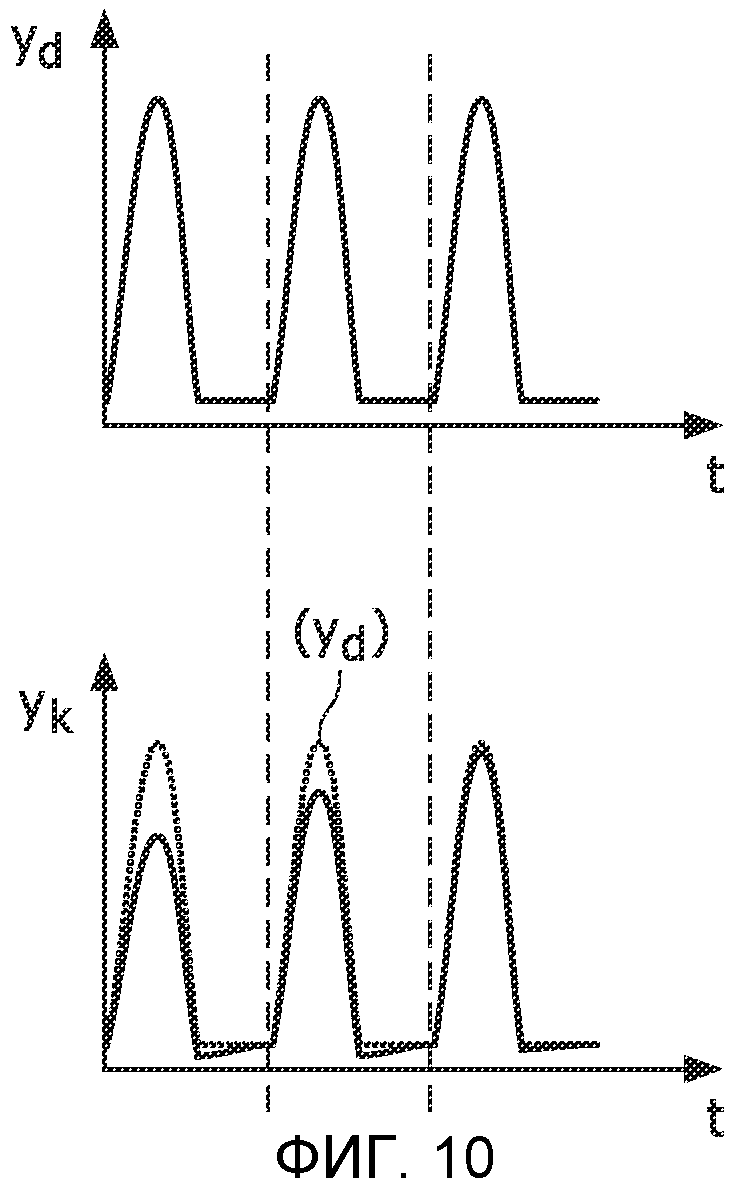
Фиг.10 - две временные диаграммы заданной формы сигнала сжатия и фактической формы сигнала сжатия в случае итерационного обучающегося контроллера, содержащего обычный PID-контроллер.
Подробное описание вариантов осуществления
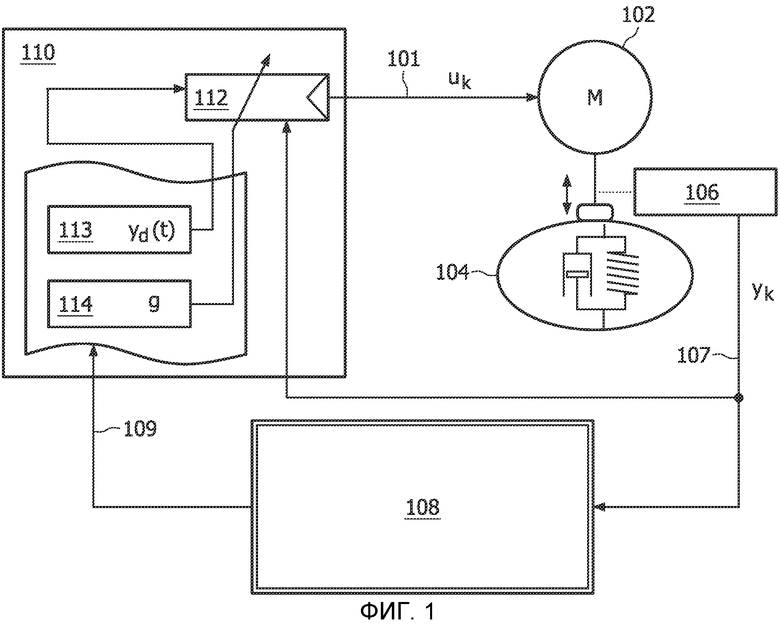
На фиг.1 схематично показана блок-схема автоматизированного устройства кардиопульмональной реанимации, соответствующего первому варианту изобретения. Автоматизированное устройство кардиопульмональной реанимации использует исполнительный механизм 102 сжатия грудной клетки, который прикладывает силу к грудной клетке 104 человека с помощью, например, прокладки и поршня. Грудная клетка 104 не является частью автоматизированного устройства кардиопульмональной реанимации и представлена механической моделью, которая аппроксимирует механическое поведение грудной клетки 104. Механическая модель может быть представлена пружиной и амортизатором, соединенными параллельно. Перемещение прокладки и, следовательно, также сжатие грудной клетки обнаруживаются датчиком 106 физиологического параметра, который обеспечивает измерения фактического сжатия yk грудной клетки. Результаты измерения фактического сжатия yk грудной клетки подаются посредством соединения для передачи результатов измерений фактического сжатия 107 грудной клетки на контроллер 112, сравнивающий фактическое сжатие yk грудной клетки с заданной формой сигнала сжатия yd грудной клетки и определяет приводной сигнал uk для исполнительного механизма 102 сжатия грудной клетки. Сигнал uk исполнительного механизма посредством соединения 101 подается на исполнительный механизм 102 сжатия грудной клетки. Исполнительный механизм 102 сжатия грудной клетки, грудная клетка 104 пациента, датчик 106 физиологического параметра и контроллер 112 образуют систему управления замкнутого контура.
Было обнаружено, что механические свойства грудной клетки 104 подвержены значительным изменениям, не только от одного пациента к другому, но также и в течение времени для одного и того же пациента. Автоматизированное устройство кардиопульмональной реанимации должно быть пригодно для работы с широким диапазоном размеров и весов пациентов, с большой степенью свободы выбора формы импульса сжатия и с низким риском повреждения грудной клетки и жизненно важных органов. Заданной форме сигнала давления необходимо следовать точно и без вмешательства пользователя. Контроллер 112 c фиксированными настройками едва ли способен этого достигнуть. Поэтому автоматизированное устройство кардиопульмональной реанимации, представленное на фиг.1, содержит средство настройки контроллера 112 на вязкоупругие свойства груди пациента.
Контроллер 112 является частью привода 110 исполнительного механизма, который содержит некоторое запоминающее устройство для рабочих параметров 113 и 114. Рабочий параметр 113 является заданной формой сигнала yd(t), который используется как сигнал точки установки для контроллера 112. Рабочий параметр 114 является коэффициентом усиления g контроллера 112. Рабочие параметры 113 и 114 регулируются устройством 108 адаптивного управления, которое принимает результаты измерений фактической формы сигнала сжатия yk в качестве входного сигнала и анализирует результаты измерений в отношении качества фактической формы сигнала сжатия. Устройство 108 адаптивного управления может сравнивать определенные свойства фактической формы сигнала сжатия с заранее выбранными значениями, такими как пиковая глубина сжатия, скорость сжатия и т.п. Устройство 108 адаптивного управления может определить соответствует ли фактическая форма сигнала сжатия yk заранее выбранным значениям или превышает их. Другой альтернативой может быть сравнение устройством 1208 адаптивного управления фактической формы сигнала сжатия yk с заранее сохраненными формами волн сжатия, которые рассматриваются как оптимальные, почти оптимальные и/или нежелательные. Основываясь на анализе, устройство 108 адаптивного управления обеспечивает выходной сигнал на соединителе 109 к приводу исполнительного механизма и, в частности, на секции, где хранятся рабочие параметры 113 и 114. Другие рабочие параметры, помимо заданной формы 113 сигнала сжатия yd(t) и коэффициента усиления g контроллера 114, также возможны, такие как коэффициенты усиления интегрирующей части и дифференцирующей части в PID-контроллере.
Грудь человека с ее нелинейными вязкоупругими свойствами показана схематично. Автоматизированное устройство кардиопульмональной реанимации состоит из прокладки, блока преобразования и передачи движения, например, из вращательного в линейное, серводвигателя 102, усилителя (отдельно не показан, может быть частью контроллера 112), и устройства 110 сервоуправления. Заданная глубина сжатия и форма импульса сжатия грудины от времени используются в качестве начальных входных данных для оценки сигнала в контуре упреждения, содержащем рабочий параметр заданной формы сигнала сжатия yd(t) и контроллер 112. Заданная и фактическая форма и глубина сигнала сжатия сравниваются и сигнал ошибки минимизируется до определенного предела сервосистемой. Контур обратной связи, требуемый для сервосистемы, содержит, по меньшей мере, один физиологический параметр, связанный с пациентом, предпочтительно перемещение грудной клетки пациента во времени. Другие параметры, получаемые от пациента, могут быть вязкоупругими свойствами груди (то есть, жесткость, смягчение и т.д.), получаемые из измеренного соотношения между силой и перемещением, используя, например, датчик ускорений или другое измерительное устройство (оптическое, электрическое и т.д.).
Бесщеточный электродвигатель (например, Maxon EC-MAX 40 120 W с рекомендуемым зубчатым редуктором) выбирается для исполнительного механизма 102 сжатия грудной клетки. Возможны также другие типы двигателей (то есть, с более высокой мощностью, другой тип, такой как линейный двигатель).
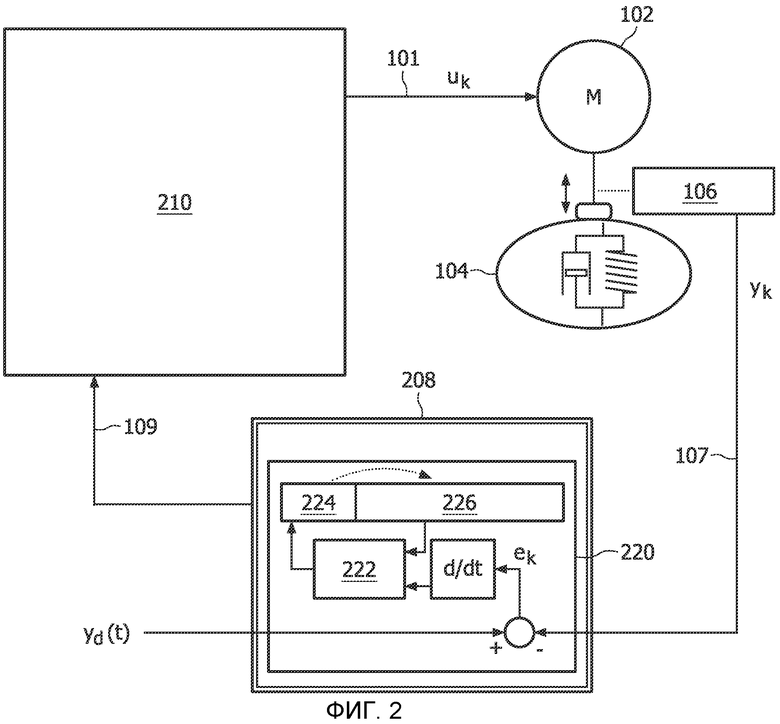
На фиг.2 показана схематическая блок-схема автоматизированного устройства кардиопульмональной реанимации, соответствующего второму варианту. Часть устройства вокруг исполнительного механизма 102 сжатия грудной клетки, грудная клетка 104 человека и датчик физиологического параметра идентичны или схожи с показанными на фиг.1. Однако, контур регулирования с обратной связью теперь входит в устройство 208 адаптивного управления. Результаты измерения фактической формы сигнала сжатия yk попадают в устройство 208 адаптивного управления через соединение 107. Результаты измерений фактической формы сигнала yk сжатия и итерационное обучающееся управление (ILC) 220 находятся внутри устройства 208 адаптивного управления. Итерационное обучающееся управление автоматически обновляет входной сигнал uk системы сжатия k до тех пор, пока сигнал ошибки ek (то есть, отклонение измеренной yk от заданной yd формы сигнала сжатия) не будет сведен к минимуму. Предварительное знание нагрузки не требуется. Заданная форма сигнала yd(t) также вводится в устройство 208 адаптивного управления и устройство 220 итерационного обучающегося управления. Разность между заданной формой сигнала yd(t) сжатия и фактической формой сигнала yk сжатия определяется и формируется сигнал ошибки ek. Блок дифференцирования по времени определяет производную относительно времени ошибки ek и передает вычисленное значение на калькулятор 222 сигнала управления. Сигнал на другой вход калькулятора 220 сигнала управления обеспечивается запоминающим устройством 226 предыдущих сигналов управления. Основываясь на двух входных сигналах и законе итерационного обучения, калькулятор 222 сигнала управления вычисляет текущий сигнал управления, который запоминается в запоминающем устройстве 224 для текущего сигнала управления. Закон итерационного обучения может иметь следующую форму:
uk+l(t)=uk(t)+γ 
В этой формуле uk(t) является входным сигналом системы (приводным сигналом), который может быть усилием или током k-го сжатия в момент времени (t), и ek является сигналом ошибки в момент времени t. Коэффициент γ (гамма) является коэффициентом усиления закона итерационного обучения. Таким образом, упреждающий сигнал сходится к оптимальному значению, очень близкому к заданной форме сигнала yd(t). Заметим, что приведенное выше уравнение используется только как пример; существует еще очень много алгоритмов. Важно знать, что начальный упреждающий сигнал и коэффициент усиления γ выбираются консервативно, чтобы избежать повреждения грудной клетки. Простой PID-контроллер содержится здесь для подавления возмущений. Возможно, что контроллер возмущений может отличаться от контроллера, показанного на фиг.1. Для системы, показанной на фиг.2, предварительное знание модели грудной клетки человека не требуются, она может адаптироваться к пациентам с широким разнообразием размеров и весов и может справляться с изменениями вязкоупругих свойств тела. Дополнительно, система очень гибкая, например, переход на другие кривые сжатия является относительно простым. Наконец, время настройки минимизировано и сама настройка автоматизирована.
Обычно заданная форма сигнала сжатия yd(t) не изменяется от одного сжатия до следующего, хотя можно было бы предположить, что можно изменять заданную форму сигнала сжатия yd(t) как функцию общего состояния здоровья пациента. Например, частота и/или глубина сжатия могли бы быть увеличены, чтобы интенсифицировать кардиопульмональную реанимацию, когда пациент перешел в критическое состояние здоровья. Тем не менее, для большинства последовательных сжатий заданная форма сигнала сжатий остается одной и той же. Итерационный алгоритм обучающегося управления использует этот факт, поскольку любое изменение рабочих параметров автоматизированного устройства кардиопульмональной реанимации может быть проверено во время следующей формы сигнала сжатия в отношении того, было ли оно успешным, то есть, уменьшилась ли ошибка ek. Поскольку итерационный алгоритм обучающегося управления зависит от сигналов управления, которые использовались во время предыдущих циклов сжатия, эти предыдущие сигналы управления должны быть сохранены. Фактически, должен быть доступен, по меньшей мере, сигнал управления непосредственно предшествующего цикла сжатия. Как уже указывалось выше, это может быть достигнуто запоминанием предыдущего сигнала(-ов) 226 управления. Текущий сигнал 224 управления перемещается в память/запоминающее устройство 226, когда заканчивается цикл сжатия, для которого он действителен. В то же самое время, более старые сигналы управления стираются из памяти/запоминающего устройства 226, поскольку они больше не нужны. Операция перемещения из запоминающего устройства 224 в запоминающее устройство 226 указывается пунктирной стрелкой на фиг.2.
Привод 210 исполнительного механизма на фиг.2 отличается от привода 110 исполнительного механизма на фиг.1. Привод 210 исполнительного механизма может содержать, например, усилитель.
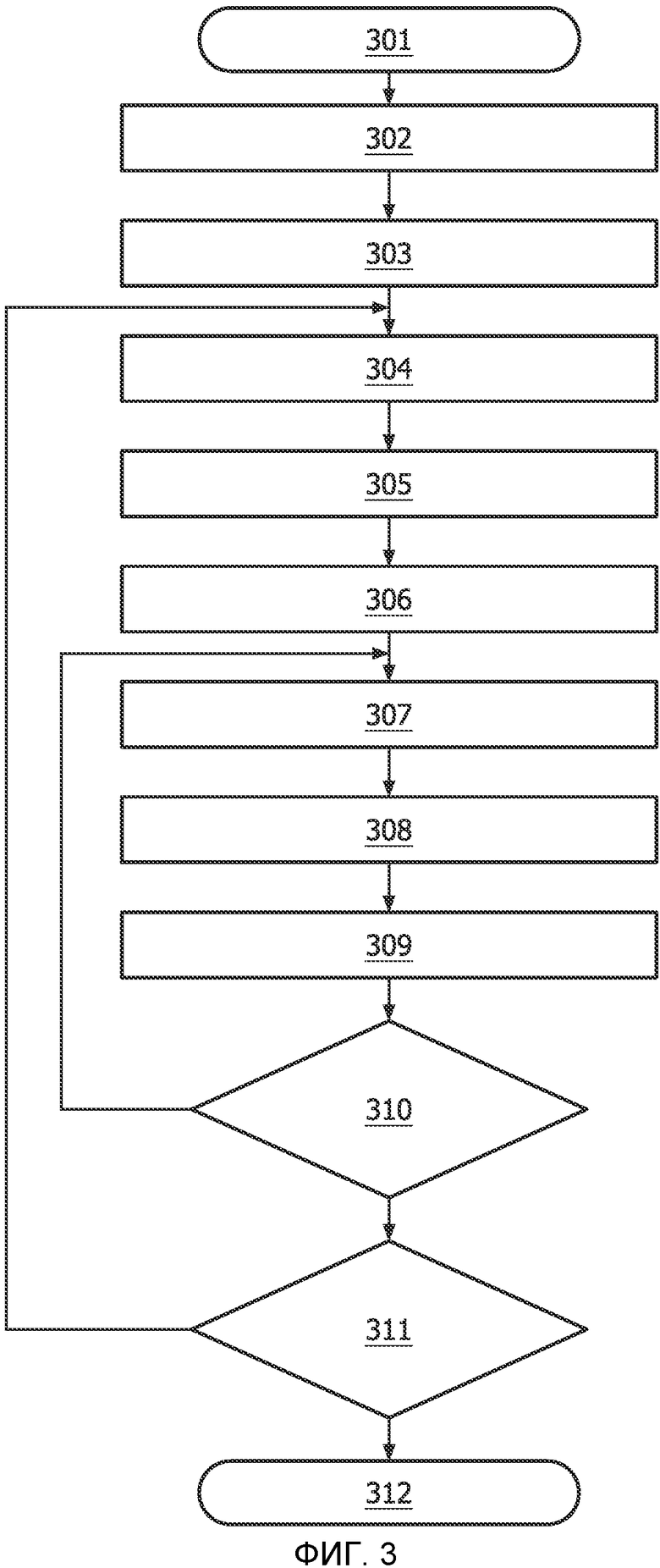
На фиг.3 показана блок-схема последовательности выполнения операций способа для автоматизированного устройства кардиопульмональной реанимации, соответствующую первому варианту настоящей заявки. Способ начинается с блока 301. В блоке 302 устанавливаются рабочие параметры, чтобы сохранить начальные значения. В блоке 303 выполняется, по меньшей мере, одно сжатие грудной клетки. Это позволяет провести начальное определение вязкоупругого поведения грудной клетки текущего пациента и, возможно, также других свойств системы, образованной исполнительным механизмом сжатия грудной клетки и грудной клеткой. В блоке 304 собираются измеренные значения физиологических параметров. Затем в блоке 305 измеренные значения оцениваются в отношении заранее заданных условий. На основе результатов оценки в блоке 306 выполняется адаптивное управление, чтобы изменить рабочие параметры системы управления, например, контроллера внутреннего контура. Благодаря измененным рабочим параметрам, изменяется выходной сигнал реальной системы. Измеренные значения принимаются в блоке 307. В блоке 308 контроллером 112 формируются сигналы управления замкнутого контура (сравните с фиг.1). Следующее сжатие грудной клетки выполняется на этапе 309. В точке 310 разветвления определяется, должно ли выполняться следующее обновление рабочих параметров. Если в настоящее время никакое обновление рабочих параметров не планируется, способ возвращается обратно к блоку 307, чтобы продолжить обычное управление в замкнутом контуре, основанное на действующих в настоящее время рабочих параметрах. Если должно быть сделано обновление рабочих параметров, способ переходит во вторую точку 311 разветвления, внутри которой определяется, должна ли быть прекращена кардиопульмональная реанимация (например, из-за соответствующей команды пользователя). Если ответ "да", способ заканчивается в блоке 312. Если ответ "нет", способ возвращается назад к блоку 304 и, таким образом, начинает со сбора измеренных значений, связанных с собираемыми измеренными значениями реанимации, связанными с физиологическими параметрами.
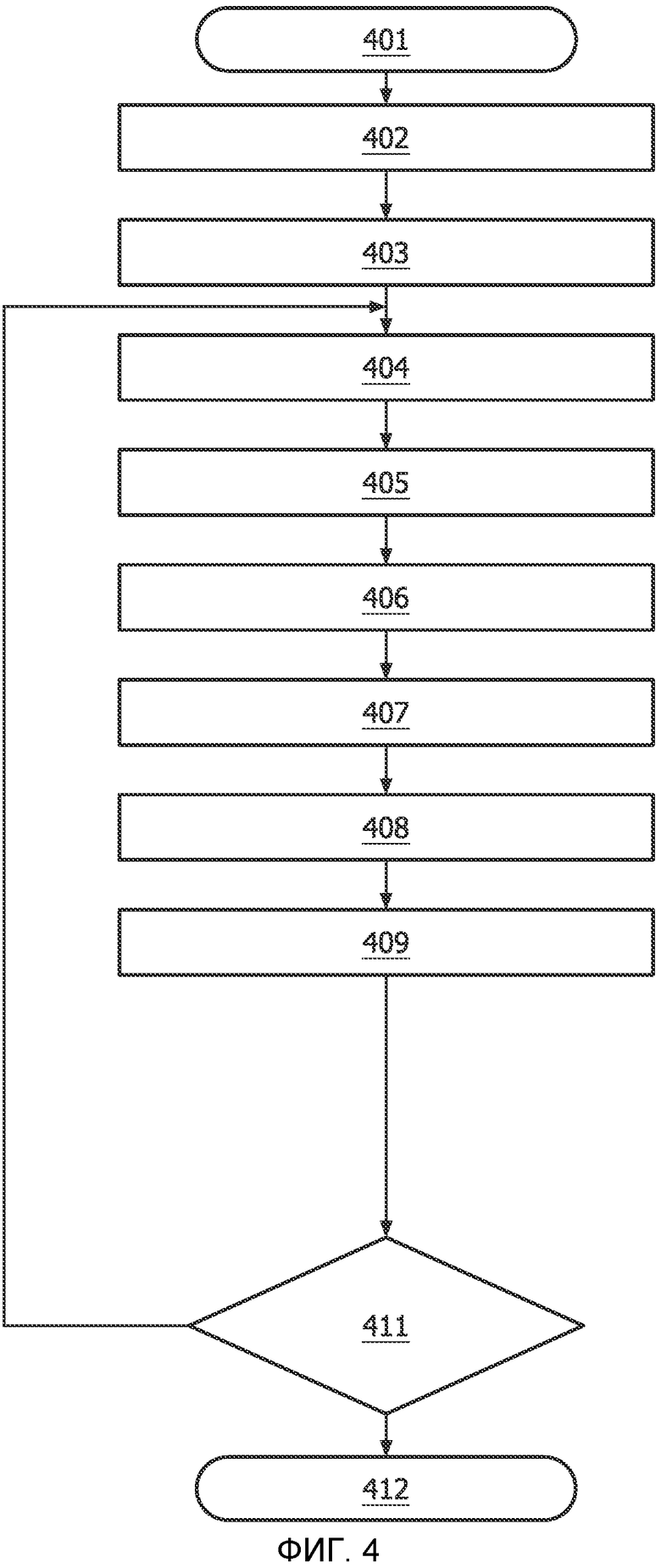
На фиг.4 показана блок-схема последовательности выполнения операций для способа автоматизированной кардиопульмональной реанимации, соответствующего второму варианту заявки. Способ начинается с блока 401. Как и в способе, показанном на фиг.3, устанавливаются рабочие параметры, чтобы сохранить начальные значения в блоке 402 и в блоке 403, когда выполняется, по меньшей мере, одно сжатие грудной клетки. Измеренные при реанимации значения, связанные с физиологическими параметрами, собираются в блоке 404. Затем, в блоке 405 измеренные значения оцениваются относительно заданных условий. Итерационное обучающееся управление выполняется в блоке 406 и сигнал управления формируется в блоке 407. В блоке 408 выполняется сжатие грудной клетки в соответствии с сигналом управления. Текущий сигнал управления сохраняется во время выполнения блока 409, чтобы быть доступным для следующей итерации, которая выполняется во время следующего цикла сжатия. В точке 410 разветвления выполняется определение, должна ли быть закончена кардиопульмональная реанимация (например, основываясь на соответствующей команде или входном сигнале). Если кардиопульмональная реанимация должна быть продолжена, ветвь способа поворачивается обратно к блоку 404. В противном случае, способ заканчивается в блоке 412.
На фиг.5 показана схема управления для комбинированного управления с упреждением (FFW) и обратной связью. Заданная форма сигнала сжатия ya вводится в точку 502 суммирования посредством соединения 501. Другим входным сигналом для точки 502 суммирования является фактическая форма сигнала сжатия yk. Точка 502 суммирования обеспечивает сигнал ошибки e в соединении 503, который поступает (по обратной связи) в контроллер 504. Выходной сигнал контроллер 504 (обратной связи) добавляется к упреждающему сигналу управления fk+i, обеспечиваемому контроллером 505 упреждения в точке 506 суммирования. Сумма u сигнала управления обратной связи и упреждающего сигнала управления передается в систему 507 (SYS). Система 507 взаимодействует с фактической формой сигнала сжатия yk в соединении 508, которое также имеет ответвление назад к точке 502 суммирования.
Как известно, сервоуправление старается минимизировать сигнал ошибки, то есть, разность между заданной формой сигнала сжатия yd и измеренной или фактической формой сигнала сжатия yk (сигнал обратной связи). Упреждающий входной сигнал (FFW) является необязательным, но предлагает, например, лучшее отслеживание движения по команде. Установки коэффициентов усиления, которые необходимы, не должны быть слишком низкими (плохое слежение) или слишком высокими (системная неустойчивость, возможные чрезмерные силы).
Со ссылкой на фиг.6, предложена следующая процедура оптимизации сервоуправления для конкретного пациента:
Начать CPR с низкой установки силы и низкой установки усиления (блоки 601 и "yd1, FFW1, низкий G"). Эти установки должны быть определены, исходя из размера пациента. Может использоваться либо заданный по умолчанию упреждающий входной сигнал, либо оптимальный упреждающий импульс, определенный, исходя из физиологических данных пациента. Установки коэффициентов усиления регулируются таким образом, чтобы заданное движение отслеживалось с определенной ошибкой e (например, среднее или максимальное значение) таким образом, чтобы сигнал ошибки находился в пределах определенного заданного диапазона ε (eps) - сравните с точкой разветвления "e>eps?". Сила увеличивается с увеличением упреждающего сигнала и, в случае необходимости, действие PID усиливается (блок "G = G + x") таким образом, что сигнал ошибки находится в пределах заданного диапазона. Процедура повторяется до тех пор, пока не будут достигнуты заданные глубина и форма сигнала сжатия, что указывается ошибкой e, находящейся ниже порога ε.
На фиг.7 показан сервоконтроллер для итерационного обучающего управления (ILC). Снова, блок SYS представляет систему, содержащую, преимущественно, грудную клетку и исполнительный механизм сжатия грудной клетки. Он принимает входной сигнал системы (приводной сигнал) uk в качестве входного сигнала и реагирует на измеренную форму сигнала сжатия yk. Входной сигнал uk системы и измеренная форма сигнала сжатия yk вместе подаются на итерационный обучающийся контроллер через соответствующее запоминающее устройство MEM. Итерационный обучающийся контроллер формирует входной сигнал uk+1 системы для следующего цикла, который запоминается в дополнительном запоминающем устройстве MEM до тех пор, пока он не будет использован в следующем цикле. Два остальных запоминающих устройства MEM также могут объединяться, но здесь для ясности нарисованы отдельно. Итерационный обучающийся контроллер содержит упреждающую часть FFW и простой PID-контроллер для подавления возмущений.
На фиг.8-10 показаны различные временные диаграммы заданной формы сигнала сжатия и фактической формы сигнала сжатия yk для различных типов контроллеров. Заданная форма сигнала yd всегда является одной и той же, чтобы позволить проводить сравнение.
На фиг.8 показана временная диаграмма выходного сигнала yk системы в случае PID-контроллера с консервативными установками коэффициента усиления. В частности, коэффициент усиления пропорциональной части PID-контроллера был выбран равным G=5, коэффициент усиления интегрирующей части PID-контроллера был установлен равным I=0,001, и коэффициент усиления дифференциальной части PID-контроллера был установлен равным D=0,001. Очевидно, что коэффициент усиления 5 слишком низкий, поэтому заданная форма сигнала yd не очень хорошо повторяется выходным сигналом yk системы. В частности, скорости нарастания и спада слишком медленны и расширяют каждый импульс сжатия во времени, так что два соседних импульса сжатия сливаются друг с другом. Это может вызвать проблему для перфузии крови, потому что у сердца недостаточно времени, чтобы успеть расслабиться перед следующим сжатием.
На фиг.9 показана временная диаграмма для выходного сигнала yk системы в случае PID-контроллера с относительно высокими установками коэффициентов усиления. Хотя коэффициенты усиления интегрирующей части и дифференцирующей части неизменны по сравнению с установками в контексте фиг.8, пропорциональное усилие теперь равно G=100. Такой коэффициент усиления дает хорошие результаты с точки зрения следования фактической формы сигнала сжатия заданной форме сигнала сжатия. Однако, могут наблюдаться некоторые затухающие колебания и близость к неустойчивости, особенно вблизи момента, когда импульс сжатия возвращается в положение покоя. На фиг.8 и 9 показано влияние установок коэффициентов усиления. Увеличение усиления в дальнейшем может приводить к неустойчивости и тяжелому повреждению груди и органов.
На фиг.10 показан результат работы автоматизированного устройства кардиопульмональной реанимации, основанного на итерационном обучающемся управлении (ILC). Механическая система (то есть, пациент) является той же самой, что и в случаях PID-управления на фиг.8 и 9. Можно заметить, что заданная кривая сжатия (повторяется в виде пунктирной линии на нижней временной диаграмме для лучшей сравнимости) достигает хорошего приближения в пределах нескольких импульсов. При итерационном обучающемся управлении нет необходимости знать детали механической системы. Оптимальный упреждающий импульс находится автоматически, заданный импульс сжатия достигается быстро и намного более точно, чем тот, который может быть получен с помощью PID-контроллера. Заметим, что при PID-управлении может использоваться низкий коэффициент усиления и изменения в нагрузке отслеживаются автоматически.
Хотя изобретение было представлено чертежами и описано подробно на чертежах и предшествующем описании, такие представление и описание следует считать иллюстративными или примерами, не создающими ограничений; изобретение не ограничивается раскрытыми вариантами осуществления. Например, возможно, чтобы изобретение работало в варианте осуществления, в котором процедура начинала и поддерживала автоматизированную CPR, оптимальную для конкретного пациента, индивидуализировала силу для пациента, снижала травму, связанную с CPR, и автоматически следовала за изменениями в механической нагрузке на пациента. Упреждающий входной сигнал сервосистемы может быть приблизительно определен. Устройство и/или способ могут пытаться следовать форме сигнала сжатия, соответствующей наилучшей практике (ручной). Возможен широкий диапазон форм сигнала, новые формы сигнала могут легко вводиться. Может использоваться упреждающий входной компонент сервосистемы для автоматизированной CPR или адаптивная сервосистема.
Другие вариации в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множественное число. Единственный процессор или другой блок могут выполнить функции нескольких позиций, упомянутых в формуле изобретения. Простой факт, что некоторые критерии упоминаются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих критериев не может использоваться для достижения преимущества. Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптический носитель данных или твердотельный носитель, предоставляемый вместе с другими техническими средствами или как часть других технических средств, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи. Любые ссылочные знаки в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
Группа изобретений относится к медицине, а именно к реаниматологии, и может быть использована при необходимости проведения кардиопульмональной реанимации. Для этого предложено автоматизированное устройство, содержащее исполнительный механизм сжатия грудной клетки, привод исполнительного механизма, датчик физиологического параметра, устройство адаптивного управления, основывающееся на сравнении измеренной формы сигнала сжатия грудной клетки с заданной формой сигнала для сжатия грудной клетки. Предложен способ с использованием данного устройства, включающий этапы установки безопасных начальных значений рабочих параметров, выполнения по меньшей мере одного сжатия грудной клетки устройством, получения формы сигнала сжатия грудной клетки, оценки формы сигнала сжатия грудной клетки и соответствующих изменений рабочих параметров. Также предложен носитель, содержащий программный код, позволяющий процессору выполнять способ. Изобретения обеспечивают оптимальное сжатие грудной клетки во время проведения реанимационных мероприятий за счет автоматической адаптации устройства к изменениям во время сжатия грудной клетки. 3 н. и 5 з.п. ф-лы, 10 ил.
1. Автоматизированное устройство кардиопульмональной реанимации, содержащее:
исполнительный механизм (102) сжатия грудной клетки для приложения усилия к грудной клетке пациента, основываясь на приводном сигнале,
привод (110; 210) исполнительного механизма для подачи изменяющихся во времени приводных сигналов на исполнительный механизм (102) сжатия грудной клетки в зависимости от рабочих параметров (113; 114) привода исполнительного механизма, причем рабочие параметры определяют динамическое поведение механической системы, образованной исполнительным механизмом (102) сжатия грудной клетки и грудной клеткой (104) пациента, датчик (106) физиологического параметра для измерения формы сигнала сжатия грудной клетки, образующейся в результате усилия, приложенного к грудной клетке исполнительным механизмом сжатия грудной клетки, и устройство (108; 208) адаптивного управления для итерационного определения приводного сигнала для исполнительного механизма сжатия грудной клетки, основываясь на сравнении измеренной формы сигнала сжатия грудной клетки с заданной формой сигнала для сжатия грудной клетки.
2. Автоматизированное устройство кардиопульмональной реанимации по п.1, в котором привод (110; 210) исполнительного механизма содержит контроллер, принимающий измеренные значения и соответствующее заданное значение и формирующий сигналы управления замкнутого контура для исполнительного механизма (102) сжатия грудной клетки.
3. Автоматизированное устройство кардиопульмональной реанимации по п.2, в котором рабочие параметры привода (110; 210) исполнительного механизма, подвергаемого адаптивному управлению (108; 208), содержат, по меньшей мере, одно из: коэффициента усиления контроллера и заданного значения.
4. Автоматизированное устройство кардиопульмональной реанимации по п.1, в котором сравнение является разностью между измеренной формой сигнала сжатия грудной клетки и заданной формой сигнала и разность по времени дифференцируется.
5. Автоматизированное устройство кардиопульмональной реанимации по п.4, в котором итерация определяется законом итерационного обучения следующим образом:

где uk(t) - сигнал управления для исполнительного механизма (102) сжатия грудной клетки во время текущего интервала времени;
uk+1(t) - сигнал управления для исполнительного механизма (102) сжатия грудной клетки во время последующего интервала времени;
γ - коэффициент усиления при итерационном обучении;
ek(t) - разность между заданным значением и измеренным значением; и
d/dt - производная по времени.
6. Способ автоматизированной кардиопульмональной реанимации, содержащий этапы, на которых:
а) устанавливают безопасные начальные значения рабочих параметров, определяющих динамическое поведение системы, содержащей грудную клетку (104) пациента и исполнительный механизм (102) сжатия грудной клетки автоматизированного устройства кардиопульмональной реанимации, причем способ дополнительно содержит итерационное выполнение этапов, на которых:
b) выполняют, по меньшей мере, одно сжатие грудной клетки автоматизированным устройством кардиопульмональной реанимации, основываясь на установленных рабочих параметрах,
c) получают форму сигнала сжатия грудной клетки, образующуюся в результате сжатия грудной клетки,
d) оценивают форму сигнала сжатия грудной клетки в отношении соответствия заданной форме сигнала сжатия грудной клетки,
e) изменяют рабочие параметры в соответствии со схемой адаптивного управления, используя результат оценки.
7. Способ по п.6, в котором итерационное обучающееся управление определяется в соответствии с законом итерационного обучения следующим образом:
где uk - сигнал управления для исполнительного механизма (102) сжатия грудной клетки во время текущего интервала времени;
uk+1 - сигнал управления для исполнительного механизма (102) сжатия грудной клетки во время последующего интервала времени;
γ - коэффициент усиления при итерационном обучении; и
ek - разность между заданным значением и измеренным значением; и
d/dt - производная по времени.
8. Носитель, содержащий программный код, позволяющий процессору выполнять способ по п.6.
| ЕР 1854444 А, 14.11.2007 | |||
| УСТРОЙСТВО ДЛЯ СЖАТИЯ ГРУДНОЙ КЛЕТКИ ПРИ ОСТАНОВКЕ СЕРДЦА (ВАРИАНТЫ) | 1996 |
|
RU2194488C2 |
| ЕР 1913922 А2, 23.04.2008 | |||
| US 20070270724 A1, 22.11.2007 | |||
| ЖДАНОВ Г.Г | |||
| Реанимация | |||
| Учебное пособие | |||
| - М., 2005, с.11, с.21-25 | |||
| VIDHANI К, et al | |||
| The CardioPump: CEPOD guidelines and validation of new techniques., BrJAnaesth | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |

