Данная заявка притязает на преимущества даты подачи заявки на патент США № 61/931,243, поданной 24 января 2014, и заявки на патент США № 62/033,904, поданной 6 августа 2014, содержание которых полностью включено в данный документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к управлению землеройно-транспортными/погрузочно-транспортными средствами. В частности, данное изобретение относится к автономному или полуавтономному управлению землеройно-транспортными/погрузочно-транспортными средствами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Автономные (или роботизированные) землеройно-транспортные/погрузочно-транспортные средства представляют интерес в горнодобывающей и строительной отраслях, в которых стоит задача удаления операторов из опасных окружающих сред, повышения степени использования и производительности машин и уменьшения эксплуатационных затрат. Автономная выемка грунта также представляет интерес в изучении Луны или планет, на которых выемка грунта не может быть легко выполнена посредством дистанционного управления.
В горнодобывающей и строительной отраслях автономная выемка грунта обычно включает разработку раздробленной породы с использованием погрузочно-доставочной машины (LHD). То, что делает роботизированную выемку грунта сложной задачей, - это характер взаимодействий между ковшом и породой. На эксплуатационные характеристики сильно влияют условия взаимодействия между машиной и средой, окружающей ее. Например, сопротивление, с которым сталкивается ковш, когда он пытается проникнуть в навал породы, может изменяться в значительной степени в зависимости от свойств среды (например, плотности и твердости), геометрии навала породы и распределения размеров и форм частиц породы. Действительно, будет очень трудно заранее определить точный характер будущих взаимодействий ковша и породы перед выполнением какой-либо конкретной операции по разработке/выемке грунта.
В предыдущих разработках предпринимались попытки автоматизировать выемку грунта/землеройные работы путем использования устройства управления и сил, измеряемых на ковше, для смещения между отдельными траекториями черпания для выемки из навала породы или использования устройства регулирования по податливости для черпания заданных грунтов. Оба данных устройства управления/регулирования были протестированы только в сравнительно однородных материалах, и они не работали надлежащим образом при столкновении с подземными неровностями. Следовательно, они плохо подходили для автономной разработки типовых навалов породы и в реальных ситуациях, в которых часто сталкиваются с подземными препятствиями. Другие разработки, в которых использовалось устройство управления на принципах нечеткой логики, давали нестабильные результаты, и их трудно реализовать и поддерживать в качестве коммерческого продукта. Было предложено устройство регулирования, базирующееся на регулировании по податливости и использующее измеренные силы для регулирования скорости исполнительного механизма ковша, но оно никогда не было реализовано или протестировано.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В данном документе описано устройство управления черпанием, предназначенное для автономного или полуавтономного погрузочно-транспортного средства (ALV), содержащее: по меньшей мере, один контроллер, который управляет ковшом и/или автономным погрузочно-транспортным средством в соответствии с, по меньшей мере, одним сигналом датчика, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания; при этом данный, по меньшей мере, один сигнал датчика получен от, по меньшей мере, одного датчика, соединенного с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или с одним или более приводными элементами.
В одном варианте осуществления устройство управления черпанием дополнительно содержит, по меньшей мере, один итерационный обучающийся регулятор (ILC), который использует обратную связь от, по меньшей мере, одного предыдущего черпания для модифицирования данного, по меньшей мере, одного сигнала датчика, выданного данному, по меньшей мере, одному контроллеру.
В данном документе также описано устройство управления черпанием, предназначенное для автономного погрузочно-транспортного средства, содержащее: по меньшей мере, один контроллер, который управляет ковшом и/или автономным погрузочно-транспортным средством в соответствии с, по меньшей мере, одним сигналом датчика, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, и, по меньшей мере, один итерационный обучающийся регулятор, который использует обратную связь от, по меньшей мере, одного предыдущего черпания для модифицирования данного, по меньшей мере, одного сигнала датчика, выданного данному, по меньшей мере, одному контроллеру.
В одном варианте осуществления данный, по меньшей мере, один контроллер содержит, по меньшей мере, одно устройство регулирования по податливости (адмитансный контроллер). В одном варианте осуществления данный, по меньшей мере, один сигнал датчика получают посредством измерения силы, воспринимаемой исполнительным механизмом стрелы. В другом варианте осуществления данный, по меньшей мере, один сигнал датчика получают посредством измерения силы, воспринимаемой приводным элементом.
В одном варианте осуществления устройство регулирования по податливости может регулировать скорость ковша. По меньшей мере, одно устройство регулирования по податливости может содержать устройство адаптивного регулирования по податливости. Устройство адаптивного регулирования по податливости может динамически регулировать, по меньшей мере, один параметр в ответ на различие между сигналом датчика и заданным сигналом.
В одном варианте осуществления данный, по меньшей мере, один контроллер преобразует один или более сигналов датчиков в диапазон возможных скоростей ковша или скоростей автономного погрузочно-транспортного средства посредством использования, по меньшей мере, одного из пропорционального, интегрального и дифференциального регулирования.
В одном варианте осуществления данный, по меньшей мере, один контроллер может преобразовывать суммарное отклонение силы в диапазон возможных измеренных сил посредством использования, по меньшей мере, одного из пропорционального, интегрального или дифференциального регулирования. В другом варианте осуществления данный, по меньшей мере, один итерационный обучающийся регулятор может преобразовывать сигнал от предыдущего черпания в изменения в выходном сигнале устройства управления черпанием посредством использования, по меньшей мере, одного из пропорционального, интегрального и дифференциального регулирования.
В одном варианте осуществления устройство управления черпанием может модифицировать данный, по меньшей мере, один сигнал датчика, выданный устройству управления, так, что скорость ковша или скорость автономного погрузочно-транспортного средства изменяются.
В одном варианте осуществления устройство управления черпанием может содержать, по меньшей мере, один регулятор положения, который регулирует, по меньшей мере, одно из перемещения ковша автономного погрузочно-транспортного средства в, по меньшей мере, одно выбранное положение и перемещения автономного погрузочно-транспортного средства относительно навала породы. В другом варианте осуществления устройство управления черпанием может содержать первый итерационный обучающийся регулятор скорости, который изменяет скорость автономного погрузочно-транспортного средства на основе сигнала датчика, характеризующего взаимодействие между ковшом и навалом породы во время, по меньшей мере, одного предыдущего черпания, и второй итерационный обучающийся регулятор, который модифицирует сигнал датчика, полученный исходя из измерения отклонения силы, действующей на ковш и стрелу при, по меньшей мере, одном предыдущем черпании.
В еще одном варианте осуществления устройство управления черпанием может содержать первый итерационный обучающийся регулятор, который модифицирует сигнал датчика, выдаваемый устройству регулирования стрелы по податливости, и второй итерационный обучающийся регулятор, который модифицирует сигнал датчика, выдаваемый устройству регулирования ковша по податливости, при этом модифицирование базируется на обратной связи от, по меньшей мере, одного предыдущего черпания.
В данном документе также описано программное средство, предназначенное для использования вместе с устройством управления черпанием, предназначенным для автономного погрузочно-транспортного средства и содержащим компьютер, при этом программное средство содержит: компьютерную программу, хранящуюся на энергонезависимом носителе информации, совместимом с компьютером, при этом компьютерная программа содержит команды для управления компьютером для выполнения одного или более из: получения, по меньшей мере, одного сигнала датчика от, по меньшей мере, одного датчика, взаимодействующего с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или одним или более приводными элементами, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, и управления ковшом и/или автономным погрузочно-транспортным средством в соответствии с данным, по меньшей мере, одним сигналом датчика.
В данном документе также описано программное средство, предназначенное для использования вместе с устройством управления черпанием, предназначенным для автономного погрузочно-транспортного средства и содержащим компьютер, при этом программное средство содержит: компьютерную программу, хранящуюся на энергонезависимом носителе информации, совместимом с компьютером, при этом компьютерная программа содержит команды для управления компьютером для выполнения одного или более из: управления ковшом и/или автономным погрузочно-транспортным средством в соответствии с, по меньшей мере, одним сигналом датчика, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, или выдачи указания итерационному обучающемуся регулятору использовать обратную связь от, по меньшей мере, одного предыдущего черпания для модифицирования данного, по меньшей мере, одного сигнала датчика, при этом модифицирование данного, по меньшей мере, одного сигнала датчика изменяет управление ковшом и/или автономным погрузочно-транспортным средством.
В данном документе также описан способ управления автономным погрузочно-транспортным средством, включающий: получение, по меньшей мере, одного сигнала датчика от, по меньшей мере, одного датчика, взаимодействующего с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или одним или более приводными элементами, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания; и управление ковшом и/или автономным погрузочно-транспортным средством в соответствии с данным, по меньшей мере, одним сигналом датчика.
В данном документе также описан способ управления автономным погрузочно-транспортным средством, включающий: управление ковшом и/или автономным погрузочно-транспортным средством в соответствии с, по меньшей мере, одним сигналом датчика, при этом данный, по меньшей мере, один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания; и модифицирование данного, по меньшей мере, одного сигнала датчика посредством использования, по меньшей мере, одного итерационного обучающегося регулятора, в который включена обратная связь от, по меньшей мере, одного предыдущего черпания, при этом модифицирование данного, по меньшей мере, одного сигнала датчика изменяет управление ковшом и/или автономным погрузочно-транспортным средством.
В одном варианте осуществления способ может включать модифицирование данного, по меньшей мере, одного сигнала датчика, выдаваемого устройству управления/контроллеру, так, что скорость ковша или скорость автономного погрузочно-транспортного средства изменяются. Управление может дополнительно включать динамическое регулирование, по меньшей мере, одного параметра в ответ на различие между сигналом датчика и заданным сигналом.
Способ может дополнительно включать управление, по меньшей мере, одним из перемещения ковша автономного погрузочно-транспортного средства в, по меньшей мере, одно выбранное положение и перемещения автономного погрузочно-транспортного средства относительно навала породы. Способ может дополнительно включать изменение скорости автономного погрузочно-транспортного средства на основе сигнала датчика, характеризующего взаимодействие между ковшом и навалом породы во время, по меньшей мере, одного предыдущего черпания, и модифицирование сигнала датчика, полученного исходя из измерения отклонения силы, действующей на ковш и стрелу при, по меньшей мере, одном предыдущем черпании. Способ может дополнительно включать модифицирование сигнала датчика, выдаваемого устройству регулирования стрелы по податливости, и модифицирование сигнала датчика, выдаваемого устройству регулирования ковша по податливости, при этом модифицирование базируется на обратной связи от, по меньшей мере, одного предыдущего черпания.
В одном варианте осуществления управление может включать преобразование суммарного отклонения силы в диапазон возможных измеренных сил посредством использования, по меньшей мере, одного из пропорционального, интегрального и дифференциального регулирования. Способ может дополнительно включать преобразование сигнала от предыдущего черпания в изменения в выходном сигнале устройства управления черпанием посредством использования, по меньшей мере, одного из пропорционального, интегрального и дифференциального регулирования.
В другом варианте осуществления управление полезным грузом может осуществляться на основе параметра состояния отрыва или посредством модифицирования подобного параметра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для большего понимания изобретения и для более четкой демонстрации того, как оно может быть осуществлено, варианты осуществления будут описаны в качестве примера со ссылкой на сопровождающие чертежи, в которых:
фиг. 1А представляет собой схематическое изображение автономного погрузочно-транспортного средства;
фиг. 1В-1D представляют собой схематические изображения автономного погрузочно-транспортного средства во время трех фаз черпания, соответствующих врезанию (фиг. 1В), черпанию (фиг. 1С) и отрыву (фиг. 1D);
фиг. 2А и 2В представляют собой блок-схемы обобщенных вариантов осуществления устройства управления черпанием;
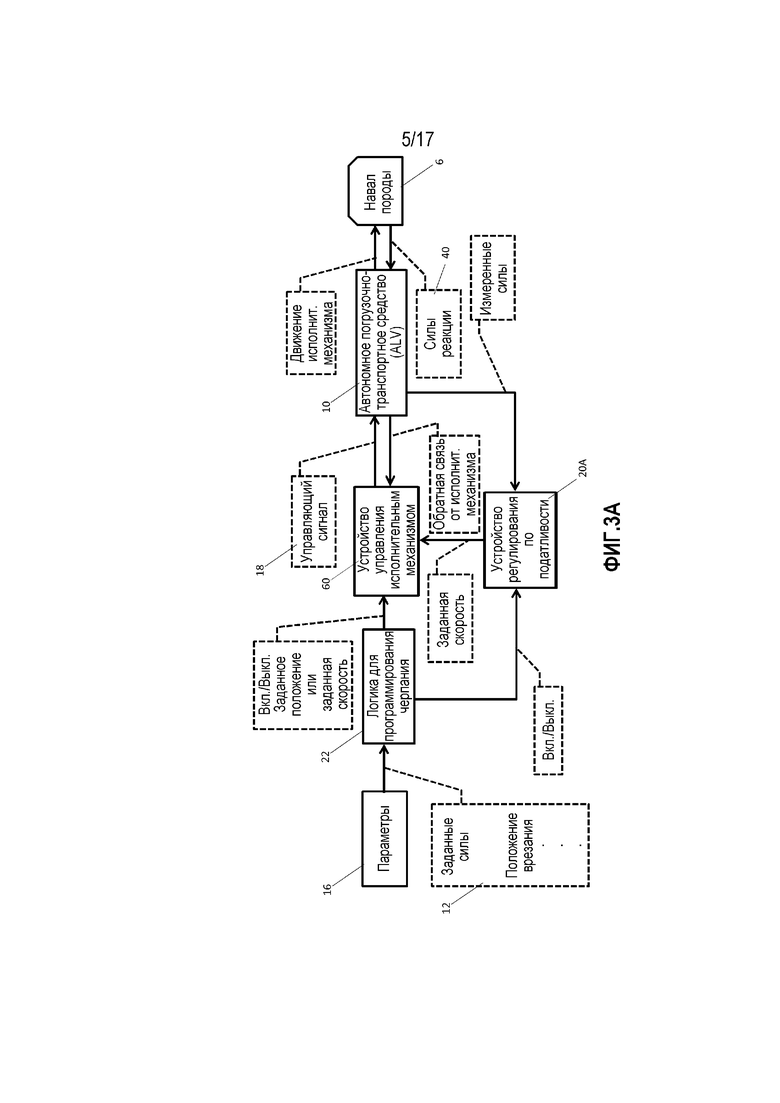
фиг. 3А представляет собой блок-схему устройства регулирования по податливости при черпании в соответствии с одним вариантом осуществления;
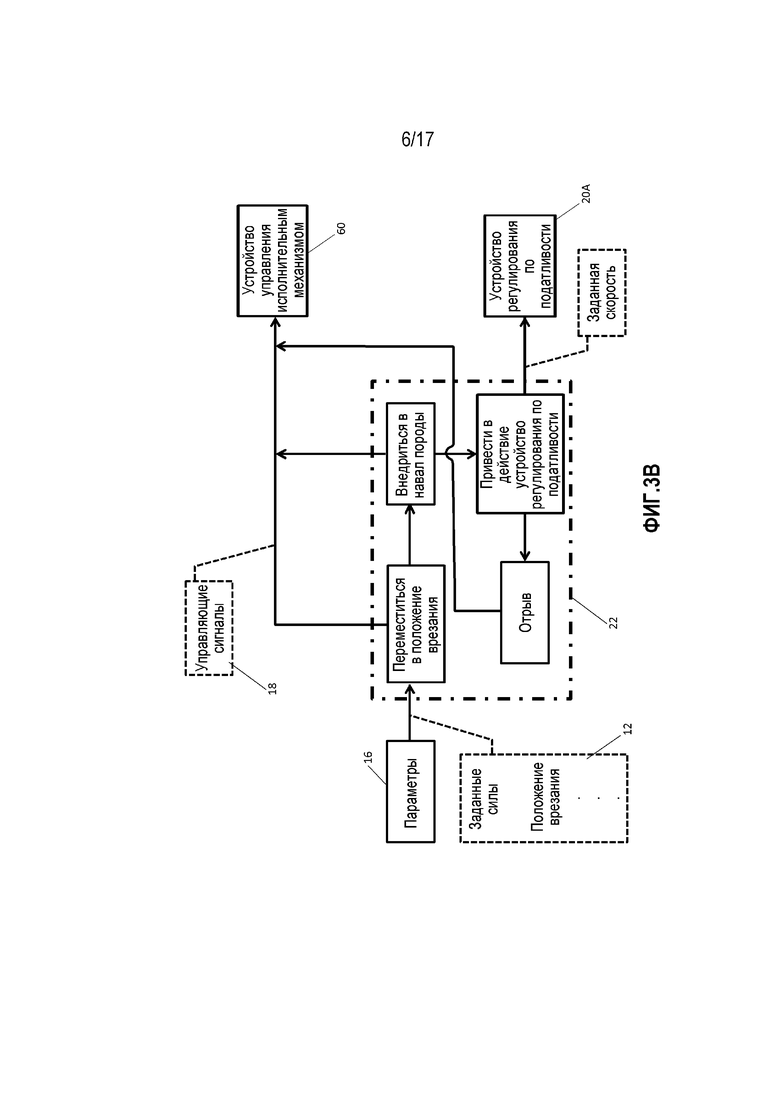
фиг. 3В представляет собой блок-схему примера логики управления черпанием, используемой в вариантах осуществления устройства управления черпанием;
фиг. 3С представляет собой блок-схему устройства управления черпанием в соответствии с одним вариантом осуществления, который включает в себя устройство регулирования по податливости;
фиг. 3D представляет собой блок-схему устройства управления черпанием в соответствии с одним вариантом осуществления, который включает в себя итерационный обучающийся регулятор (ILC);
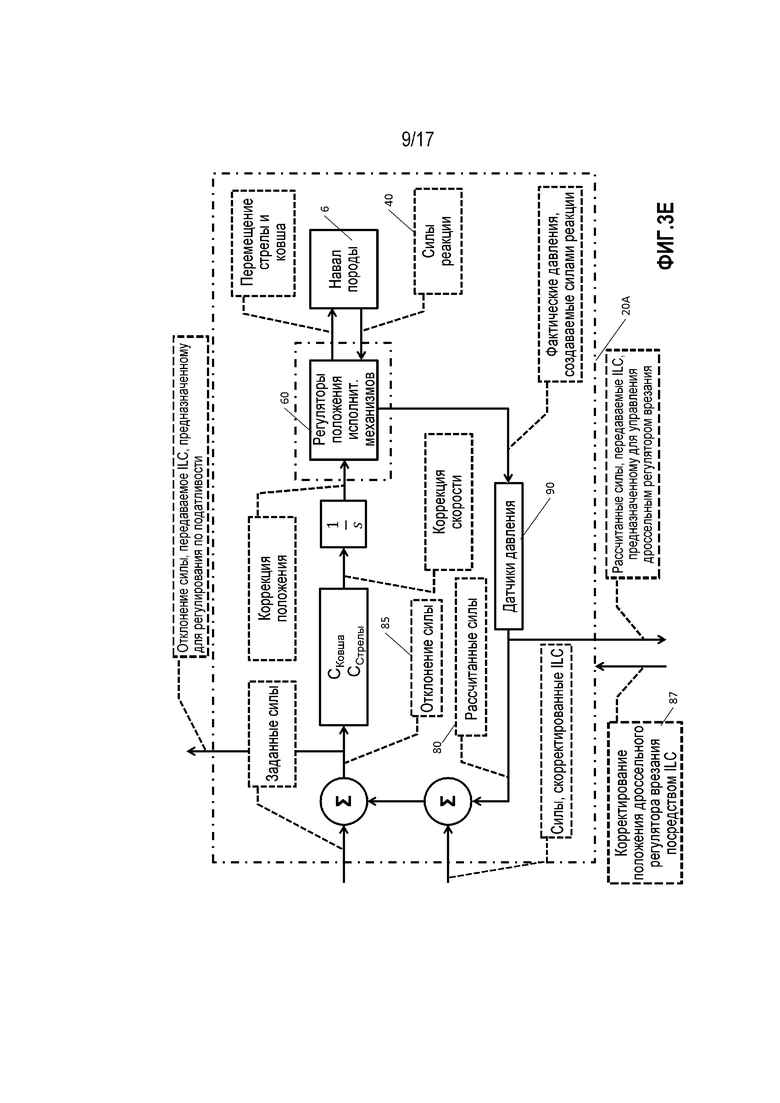
фиг. 3Е представляет собой блок-схему устройства управления черпанием в соответствии с другим вариантом осуществления, который включает в себя итерационный обучающийся регулятор;
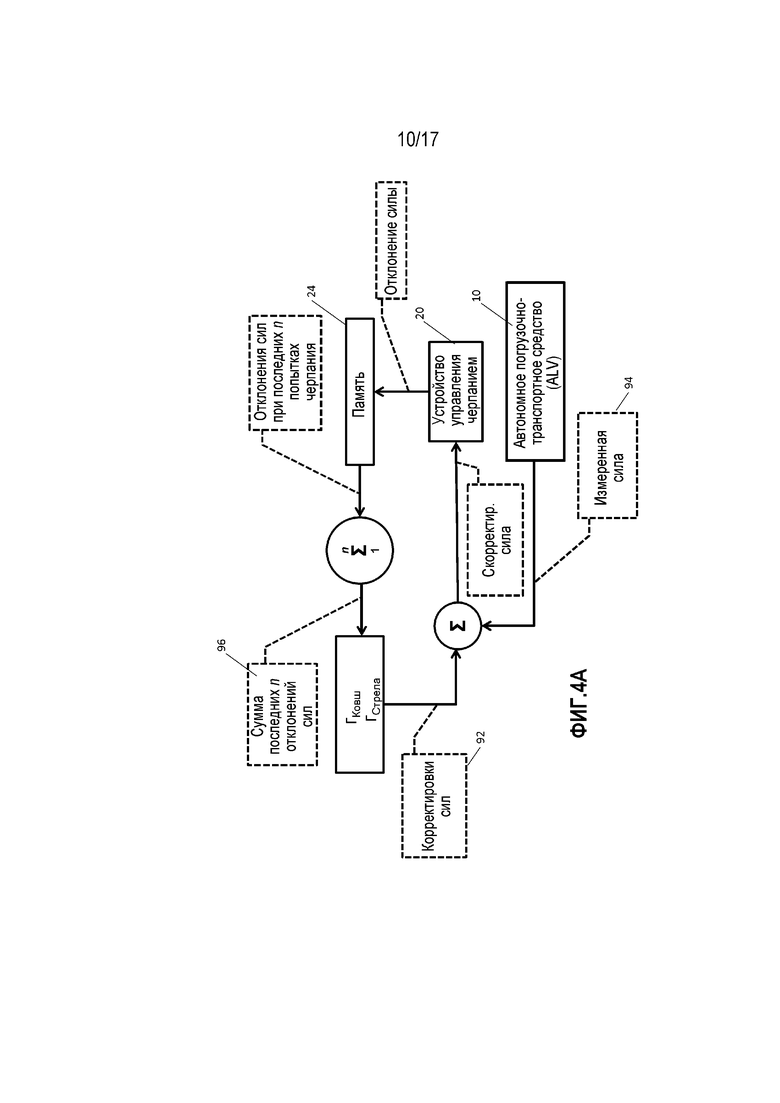
фиг. 4А и 4В представляют собой блок-схемы, показывающие генерирование корректировок сил для стрелы и ковша в соответствии с вариантами осуществления;
фиг. 4С и 4D представляют собой блок-схемы, показывающие генерирование корректировки положения дроссельного регулятора врезания в соответствии с вариантами осуществления;
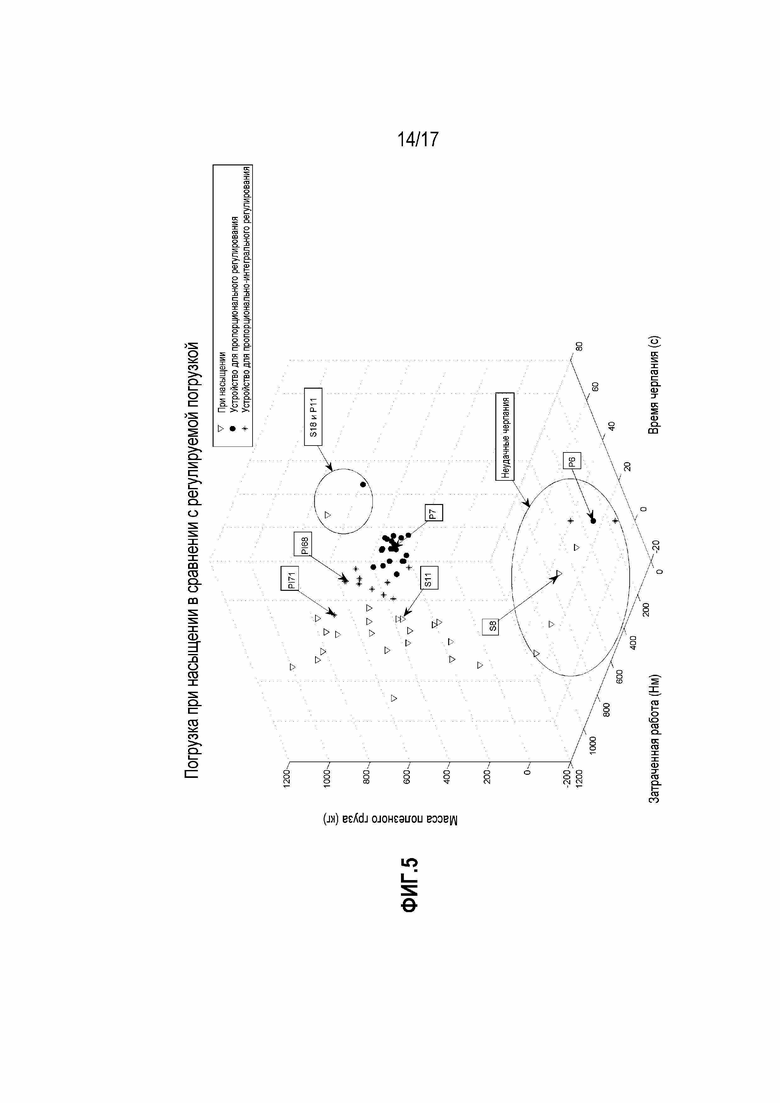
фиг. 5 представляет собой график, показывающий значения эффективности черпания для 57 попыток черпания при использовании постановки эксперимента по Примеру 1;
фиг. 6А и 6В представляют собой графики, показывающие заданные профили сил, действующих соответственно на стрелу и ковш, и заданные силы (в прямоугольных рамках), используемых устройствами регулирования стрелы и ковша по податливости в варианте осуществления, описанном в Примере 2;
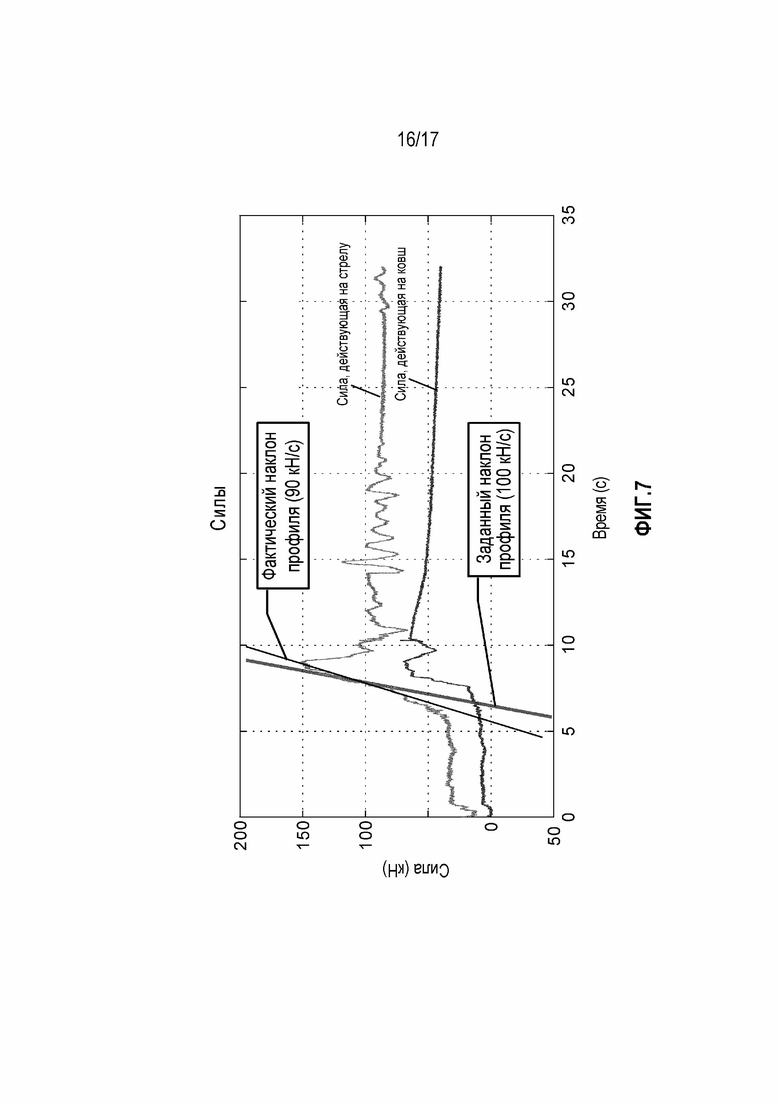
фиг. 7 представляет собой график, показывающий заданную и фактическую скорость изменения силы врезания, действующей на стрелу, в соответствии с вариантом осуществления, описанным в Примере 2; и
фиг. 8 представляет собой график, показывающий заданные силы, действующие на стрелу и ковш и используемые для вычисления суммарного отклонения для каждой из попыток черпания (темное затенение для отрицательного отклонения; светлое затенение для положительного отклонения) для варианта осуществления, описанного в Примере 2.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В используемом в данном документе смысле термин «автономное погрузочно-транспортное средство» (ALV) предназначен для обозначения по существу автономного, полуавтономного или роботизированного экскаватора или погрузочно-доставочного (LHD) транспортного средства, используемого в соответствии с вариантами осуществления, описанными в данном документе.
В используемом в данном документе смысле термин «исполнительный механизм» предназначен для обозначения компонента автономного погрузочно-транспортного средства, который вызывает изменение конфигурации и/или движения транспортного средства. Исполнительный механизм может выполнять функцию на основе команды от устройства управления/контроллера/регулятора. Например, конфигурация транспортного средства может включать положение и/или ориентацию стрелы или инструмента для черпания и/или положение и/или ориентацию автономного погрузочно-транспортного средства.
В используемом в данном документе смысле термин «приводной элемент» предназначен для обозначения компонента автономного погрузочно-транспортного средства, на который воздействует исполнительный механизм, например, такого как стрела или инструмент для черпания, или исполнительного механизма, который в данный момент не получает команду, но подвергается воздействию со стороны другого исполнительного механизма.
В используемом в данном документе смысле термин «ковш» предназначен для обозначения в целом предназначенного для черпания инструмента автономного погрузочно-транспортного средства, которое может содержать ковш, нож, долото, вилы, зонд, режущий зубок или другой инструмент, известный в данной области техники.
В используемом в данном документе смысле термин «навал породы» предназначен для обозначения в целом материала, загружаемого автономным погрузочно-транспортным средством. Следует понимать, что материал может представлять собой материал любого типа или состава, который может быть связан с землеройными работами, строительством, разработкой месторождений и разведочными работами, например, такой как земля, песок, гравий, руда, шлак, соль, обломки горной породы, реголит или любая их комбинация, но возможные материалы не ограничены вышеуказанными.
В используемом в данном документе смысле термин «черпание» предназначен для обозначения в целом действий, осуществляемых автономным погрузочно-транспортным средством для выполнения заданной функции посредством использования его ковша. Например, заданная функция может заключаться в заполнении ковша материалом из навала породы, при этом термин «черпать» (“dig”) можно рассматривать как эквивалентный термину «вынимать грунт» (“excavate”). Тем не менее, другие действия (например, «погрузка») также могут выполняться и могут, если требуется, предусматривать использование других инструментов для черпания. Управление черпанием, которое выполняется автономным погрузочно-транспортным средством, осуществляется посредством вариантов осуществления устройства управления черпанием, описанных в данном документе.
В используемом в данном документе смысле термин «модифицировать» означает «изменять», «регулировать» или «менять» величину или значение, например, увеличивать или уменьшать величину или значение. Величина или значение могут относиться к сигналу датчика. Модифицирование может выполняться в соответствии с математической операцией или функцией и/или может выполняться в соответствии с константой.
Варианты осуществления устройства управления черпанием, предназначенные для автономных погрузочно-транспортных средств, описанных в данном документе, обеспечивают эффективную автономную выемку грунта/черпание при широком ряде материалов в таких применениях, как разработка месторождений, строительство и разведочные работы. Варианты осуществления особенно эффективны для навалов породы, включающих в себя раздробленную породу с произвольными размерами обломков породы, с которой могут сталкиваться, например, в таких применениях, как разработка месторождений и строительство.
Обобщенное автономное погрузочно-транспортное средство показано на фиг. 1А. Как показано на фиг. 1А, автономное погрузочно-транспортное средство включает в себя ковш 1, прикрепленный к стреле 2. Ковш перемещается за счет приведения в действие линейного исполнительного механизма 3 (наклона) ковша, в то время как стрела перемещается за счет приведения в действия линейного исполнительного механизма 4 (подъема) стрелы. Данные исполнительные механизмы, которые могут быть электрическими, гидравлическими, пневматическими или представлять собой их комбинацию, могут быть снабжены линейными датчиками или кодовыми угломерами для определения конфигурации и/или перемещения ковша. Каждый исполнительный механизм имеет сторону цилиндра и сторону штока, показанные соответственно со ссылочными позициями 7 и 8 для исполнительного механизма 3 ковша. Исполнительные механизмы стрелы и ковша, обозначенные соответственно 4, 3, соединены с транспортным средством 5, которое может обеспечить перемещение стрелы и исполнительных механизмов в заданное место в пределах рабочего пространства. Во время погрузки транспортное средство обеспечивает перемещение стрелы и ковша вперед в навал 6 породы (например, на фиг. 1В). Взаимодействие между ковшом и навалом породы (например, фиг. 1С) вызывает изменения в давлении как на стороне 7 цилиндра, так и на стороне 8 штока обоих линейных исполнительных механизмов (например, фиг. 1D) до тех пор, пока ковш не будет извлечен из навала породы.
На всех блок-схемах по фиг. 2А, 2В, 3А-3Е и 4А-4D описания сигналов приведены в блоках с пунктирными линиями. Как показано на блок-схеме по фиг. 2А, автономное погрузочно-транспортное средство 10, как правило, взаимодействует с навалом 6 породы. Датчики генерируют сигналы 14 датчиков, характеризующие взаимодействие между ковшом и навалом породы (например, силы 40 реакции), и сигналы, характеризующие движение одного или более исполнительных механизмов 50 ковша. Сигналы датчиков могут генерироваться при использовании одного или более датчиков или комбинации датчиков, выбранных из акселерометра, датчика силы, датчика давления, датчика крутящего момента, динамометрического датчика и тензометрического датчика, но возможные датчики не ограничены вышеуказанными. Скорость ковша может измеряться посредством использования одного или более датчиков или комбинации датчиков, измерительных преобразователей и тому подобного, выбранных из акселерометра, регулируемого дифференциального трансформатора с линейной характеристикой, устройства для измерения отражения волн (например, сонара, лазерного датчика, инфракрасного датчика, видеокодера, оптического кодового датчика) и потенциометра (например, струнного, линейного или углового), но возможные датчики и измерительные преобразователи не ограничены вышеуказанными. Сигналы датчиков используются устройством 20 управления черпанием вместе с параметрами 16, такими как заданные силы 12, для генерирования управляющих сигналов 18, которые управляют автономным погрузочно-транспортным средством.
Варианты осуществления устройства управления черпанием могут включать в себя или использовать сенсорную систему 30 и контроллеры/управляющие устройства для управления режимом черпания, выполняемого автономным погрузочно-транспортным средством. Дополнительные подробности показаны в блок-схеме обобщенного варианта осуществления по фиг. 2В. Сенсорная система 30 включает в себя, по меньшей мере, один датчик 32 и, возможно, формирователь 34 сигналов, который подает сигнал датчика в виде входного сигнала устройству 20 управления черпанием, которое может включать в себя логическое устройство 22 и память 24. Также могут быть предусмотрены органы 26 ручного управления и интерфейс/пульт 28 оператора. Один или более датчиков могут взаимодействовать с приводным элементом 64 автономного погрузочно-транспортного средства. Например, контроллеры могут включать устройство 60 управления исполнительными механизмами для перемещения исполнительных механизмов 62 стрелы и ковша и положение врезания, для внедрения автономного погрузочно-транспортного средства в навал породы и управления перемещением автономного погрузочно-транспортного средства вперед в течение всего черпания. Сенсорная система может обнаружить, что достигнут порог по силе (например, 40 на фиг. 2А), после чего устройство 20 управления черпанием может использовать устройства регулирования по податливости в устройстве 60 управления исполнительными механизмами для регулирования скорости исполнительных механизмов 62 стрелы и/или ковша в зависимости от измеренных сил. Сенсорная система может обнаружить, что шток исполнительного механизма ковша полностью выдвинут (например, 50 на фиг. 2А), после чего перемещение автономного погрузочно-транспортного средства вперед может быть остановлено, и регулятор положения может быть использован для подъема стрелы в положение взвешивания. Сенсорная система 30 может включать в себя, по меньшей мере, один линейный или угловой датчик для каждого исполнительного механизма (например, стрелы и ковша) и, по меньшей мере, один датчик силы для каждого исполнительного механизма. В одном варианте осуществления датчики силы включают в себя один или более датчиков давления на каждом исполнительном механизме (например, один на стороне цилиндра и один на стороне штока гидравлических исполнительных механизмов). Если требуется, сенсорная система может включать в себя датчик для измерения перемещения автономного погрузочно-транспортного средства вперед. Например, датчик может включать в себя один или более из кодового угломера на колесе, инерциального датчика для обнаружения исходного контакта с навалом породы и системы технического зрения для выявления и/или оценки и/или определения характеристик состояния поверхности навала породы. Система технического зрения может включать в себя систему измерения расстояний/дальнометрическую систему, способную генерировать трехмерное изображение поверхности навала породы. Трехмерное изображение может быть использовано для выбора точки контакта между ковшом и навалом породы так, чтобы время и усилие при черпании были минимизированы. В данных вариантах осуществления устройство управления может включать в себя пропорциональный, интегральный или дифференциальный регулятор или любую их комбинацию.
Варианты осуществления устройства управления черпанием показаны на фиг. 3А-3Е. Устройство управления черпанием может включать в себя одно или более устройства 20А регулирования по податливости (фиг. 3А). Устройства регулирования по податливости реагируют на изменения в силе изменениями в скорости. Как правило, устройство регулирования по податливости стремится поддерживать соотношение механической податливости между окружающей средой (например, навалом породы) и инструментом для черпания так, чтобы скорость инструмента для черпания изменялась для достижения заданной силы реакции среды. Например, в одном варианте осуществления устройство регулирования по податливости может преобразовывать сигнал, характеризующий силу, в изменение в движении ковша (например, заданную скорость, как показано на фиг. 3С). Сигнал датчика, вводимый в устройство управления черпанием, может представлять собой один или более параметров, выбранных из высоты врезания, угла, заданной силы, действующей на стрелу, характеристики дроссельного регулятора, заданных сил, действующих на стрелу и ковш при черпании, коэффициентов усиления устройств регулирования стрелы и ковша по податливости, состояния отрыва и высоты и угла взвешивания, или может включать все из параметров, включающих высоту врезания, угол, заданную силу, действующую на стрелу, характеристику дроссельного регулятора, заданные силы, действующие на стрелу и ковш при черпании, коэффициенты усиления устройств регулирования стрелы и ковша по податливости, состояние отрыва и высоту и угол взвешивания. Например, в одном варианте осуществления при увеличении силы, действующей на ковш, скорость ковша регулируется для того, чтобы измеренные силы находились в пределах заданных значений. Использование устройств регулирования по податливости обеспечивает получение вариантов осуществления, которые являются относительно инвариантными к взаимодействиям между ковшом и навалом породы, поскольку они регулируют силу, действующую на ковш, а не положение ковша. Данное динамическое регулирование силы особенно желательно для черпания сквозь навал породы со случайными размерами обломков породы, поскольку будет трудно следовать вдоль заранее определенных (то есть статических) заданных траекторий при условии наличия препятствий произвольной формы, которые могут иметься в типовом навале породы. Параметры устройства регулирования по податливости могут включать составляющие законов пропорционального, интегрального или дифференциального регулирования, и регулятор может реализовывать схему линейного или нелинейного регулирования, например, в соответствии с математической операцией или функцией и/или в соответствии с константой. Управление устройством регулирования по податливости может осуществляться путем использования логики 22 управления черпанием, такой как логика, показанная в варианте осуществления по фиг. 3В.
Активность устройства регулирования по податливости может определяться одним или более параметрами. В одном варианте осуществления данными параметрами являются положение дроссельного регулятора врезания, предусмотренного в автономном погрузочно-транспортном средстве, и заданные значения 12 сил для устройств 20А регулирования по податливости для стрелы и ковша. Однако эффективность экскавации определяется параметрами регулятора и неизвестными параметрами навала породы (в более общем смысле, параметрами окружающей среды). Неизвестные параметры навала породы могут включать, среди прочего, распределение размеров обломков породы, форму навала, параметры породы (форму, модуль Юнга, коэффициент Пуассона и т.д.), влагосодержание, когезию и угол естественного откоса. На практике было бы нецелесообразно измерять каждый из данных параметров вследствие их количества и вследствие того, что навал породы изменяется столь часто. Несмотря на то, что существуют уравнения для моделирования более однородных материалов, таких как почвы, они, как правило, плохо подходят для моделирования неоднородных и сильно меняющихся целей, таких как навалы отбитой раздробленной породы.
Устройство регулирования по податливости преодолевает данную проблему, рассматривая навал породы как немоделируемый объект, который обеспечивает изменение сил реакции, когда ковш проходит через навал. Устройство регулирования по податливости использует данные силы для модифицирования движения ковша без четкой информации о характеристиках навала породы. В то время как устройства регулирования податливости работают хорошо, когда параметры устройств регулирования были настроены для текущего состояния навала породы, они могут нуждаться в перенастройке, когда навал породы значительно изменяется. Например, устройство регулирования по податливости, настроенное для навала мокрой породы, может быть слишком «напористым», когда навал высыхает, что приводит к напрасно затраченным усилиям и сниженной эффективности.
В некоторых применениях или ситуациях исполнительный механизм стрелы может быть использован для измерения силы при черпании и выдачи сигнала датчика, который используется устройством управления/регулирования (например, устройством регулирования по податливости, устройством адаптивного регулирования по податливости) для изменения скорости ковша. В данном случае никакие команды не выдаются исполнительному механизму стрелы, и силы, измеренные в исполнительном механизме стрелы, зависят от взаимодействия между инструментом для черпания и навалом породы. Таким образом, силы реакции, воспринимаемые исполнительным механизмом стрелы, характеризуют взаимодействие между инструментом для черпания и навалом породы. В данном примере исполнительный механизм ковша получает команды от устройства регулирования, и исполнительный механизм стрелы становится приводным элементом, поскольку никакие команды не передаются ему устройством регулирования. В качестве альтернативы или в сочетании с вышеизложенным сигнал датчика может быть получен за счет измерения деформации в приводном элементе, таком как стрела.
Следует понимать, что один или более других элементов автономного погрузочно-транспортного средства (то есть элементы, отличные от стрелы) могут быть использованы вместе с исполнительным механизмом стрелы или вместо исполнительного механизма стрелы для выдачи сигнала (-ов) датчика (-ов) устройству управления и использованы для управления автономным погрузочно-транспортным средством при условии, что подобные один или более других элементов взаимодействуют с соответствующим (соответствующими) датчиком (-ами) для генерирования сигнала (сигналов) датчика (-ов), относящегося (-ихся) к параметру черпания, такому как взаимодействие между инструментом для черпания и навалом породы.
В определенных применениях может быть желательно оптимизировать управление автономным погрузочно-транспортным средством для заполнения ковша до уровня меньше максимального. Такой вариант осуществления может, например, обеспечить уменьшение деформации компонентов автономного погрузочно-транспортного средства, в результате чего уменьшается время простоя для технического обслуживания и текущего ремонта и соответствующие затраты. Это может быть обеспечено за счет регулирования полезного груза на основе параметра состояния отрыва или за счет модифицирования такого параметра.
В применении при разработке месторождений параметры навала породы могут, например, существенно варьироваться от одного черпания к следующему, даже если извлекаемый материал остается материалом того же типа. Было доказано, что регулирование по податливости, подобное описанному в данном документе, легко адаптируется к подобным изменениям; однако значительные изменения в условиях черпания могут привести к необходимости в перенастройке устройства регулирования по податливости. Постоянная настройка устройства регулирования по податливости была бы нецелесообразной или нежелательной. Некоторые варианты осуществления, подобные описанным в данном документе, позволяют избежать проблем настройки за счет включения, по меньшей мере, одного итерационного обучающегося регулятора (ILC) 70, 72, как показано на фиг. 3D и 3Е. Итерационный обучающийся регулятор модифицирует сигналы, поступающие на вход устройства регулирования по податливости, так, чтобы параметры устройства регулирования могли оставаться постоянными при одновременном изменении выходного сигнала устройства регулирования. Например, как показано на фиг. 3D и 3Е, итерационный обучающийся регулятор может модифицировать сигнал датчика, такой как сила, поступающий на вход устройства регулирования по податливости, так, что достигается заданный режим черпания/выемки, при этом одновременно положение дроссельного регулятора врезания и заданные силы остаются такими же. В одном варианте осуществления, например по фиг. 3Е, степень, в которой модифицируются силы, определяются историей отклонений сил из предыдущих попыток черпания.
Например, если попытка черпания является более трудной, чем предыдущая попытка, отклонение силы может быть большим и отрицательным. В этом случае большая положительная корректирующая сила будет добавлена ко всем силам, вводимым в устройство регулирования по податливости, и устройство регулирования по податливости будет реагировать более активно. Преимущество итерационного обучающегося регулятора заключается в том, что он обеспечивает возможность реагирования алгоритма на изменение состояния навала породы без необходимости перенастройки (например, выбора констант, которые оптимизируют эксплуатационные характеристики) устройства регулирования по податливости. Данный признак обеспечивает экономию времени и устраняет необходимость в специалисте, который в противном случае понадобился бы для процесса перенастройки.
В другом варианте осуществления может быть использовано устройство адаптивного регулирования по податливости. Параметры (например, составляющие закона пропорционального, интегрального или дифференциального регулирования) могут настраиваться или адаптироваться динамически (например, в реальном времени или по существу в реальном времени) для компенсации быстрых изменений характеристик навала породы, таких как жесткость, во время черпания, в результате чего избегают необходимости в моделировании навала породы. Например, устройство адаптивного регулирования по податливости может использовать отклонение при отслеживании силы для динамического регулирования параметров податливости в течение всего черпания в реальном времени. В дополнительном варианте осуществления устройство адаптивного регулирования по податливости может быть использовано вместе с, по меньшей мере, одним итерационным обучающимся регулятором.
Один вариант осуществления устройства управления черпанием, показанного на блок-схеме по фиг. 3D, включает в себя два устройства 20А регулирования по податливости и два итерационных обучающихся регулятора 70, 72. Дополнительный вариант осуществления может также включать в себя устройства управления с заданными сценариями врезания и выхода. Дополнительный вариант осуществления может включать в себя детектор для определения той ситуации, если/когда автономное погрузочно-транспортное средство застрянет. Устройство управления врезанием обеспечивает перемещение исполнительных механизмов стрелы и ковша в положение врезания (например, ковш будет находиться на одном уровне с грунтом и немного выше грунта) посредством использования, например, пропорционального регулятора положения. После этого автономному погрузочно-транспортному средству выдается команда на перемещение по направлению к навалу породы со скоростью, определяемой уставкой дроссельного регулятора врезания, и ковш входит в контактное взаимодействие с навалом породы. Когда измеренные силы превысят заданное значение, устройства регулирования по податливости начнут осуществлять перемещение исполнительных механизмов стрелы и ковша. Когда ковш достигнет своего максимального наклона, устройство управления выходом берет управление на себя. Устройство управления выходом обеспечивает перемещение стрелы и ковша в положение взвешивания (например, ковш полностью наклонен и поднят над навалом породы), используя, например, пропорциональный регулятор положения. Когда материал в ковше будет взвешен, вес, время черпания и работа, выполненная исполнительными механизмами, используются для оценки успеха попытки черпания. Оптимальное черпание обеспечивает максимизацию полезного груза ковша при одновременной минимизации времени черпания и затраченной работы. В одной конфигурации устройства регулирования по податливости и регуляторы положения работают с высокой частотой для выполнения операций черпания, в то время как итерационные обучающиеся регуляторы работают только один раз на цикл черпания.
Устройство регулирования по податливости может реализовывать любую математическую зависимость, которая обеспечивает преобразование диапазона отклонений сил в диапазон возможных скоростей исполнительных механизмов. Устройство регулирования по податливости может модифицировать параметр, например, в зависимости от величины принятого сигнала за вычетом заданной величины сигнала. Фиг. 3Е представляет собой блок-схему устройства 20А регулирования по податливости в соответствии с одним вариантом осуществления. Возмущенные силы используются устройством регулирования по податливости для передачи изменений в скоростях исполнительных механизмов стрелы и ковша. Данные скорости интегрируются для получения множества заданных положений для регуляторов 60 положений исполнительных механизмов стрелы и ковша. Заданные положения отслеживаются регуляторами положения для обеспечения желательного изменения длины исполнительного механизма. Изменение длины вызывает перемещение ковша в навал породы, что вызывает изменение сил реакции. Данное изменение силы измеряется датчиками 90 давления и используется для вычисления новых сил 80, действующих на исполнительные механизмы стрелы и ковша. В одном варианте осуществления данные скорректированные силы снова подвергаются возмущению итерационным обучающимся регулятором, предназначенным для регулирования по податливости, перед передачей их снова в устройство регулирования по податливости. Как только попытка черпания будет завершена, суммарное отклонение 85 сил используется для коррекции возмущения сил для следующей попытки черпания, в то время как итерационный обучающийся регулятор, предназначенный для управления дроссельным регулятором врезания, добавляет новое отклонение наклона при врезании к предыдущим отклонениям наклона при врезании, так что может быть вычислено следующее возмущение/изменение для дроссельного регулятора врезания.
В варианте осуществления по фиг. 3Е итерационный обучающийся регулятор применяет корректировку 87 для положения дроссельного регулятора врезания по умолчанию на основе наклона кривой силы при врезании, полученной из нескольких предыдущих попыток черпания. Другими используемыми параметрами являются заданные силы при черпании. Как показано в вариантах осуществления по фиг. 4А, 4В, 4С и 4D, итерационные обучающиеся регуляторы применяют корректировку 92 для измеренных сил 94 на основе суммарного отклонения 96 сил из нескольких предыдущих попыток черпания. Например, как показано на фиг. 4С, в то время как дроссельный регулятор врезания исходно настроен в соответствии с уставкой, изменение положения дроссельного регулятора врезания осуществляется итерационным обучающимся регулятором для повышения степени постоянства эффективности черпания. На фиг. 4С и 4D исходное увеличение силы для каждой попытки черпания может быть представлено наклоном линии, проходящей через наименьшее измеренное значение силы и наибольшее измеренное значение силы, в течение периода врезания (между врезанием ковша и регулированием по податливости). Данные наклоны кривых сравниваются с идеальным наклоном кривой силы при врезании для вычисления отклонения наклона кривой для каждой попытки черпания. Данные отклонения сохраняются в памяти, и их определенное число n суммируется. Сумма 98 используется итерационным обучающимся регулятором, предназначенным для управления врезанием, для расчета того, как положение дроссельного регулятора врезания должно быть изменено для следующей попытки черпания.
Как показано, например, на фиг. 4А, итерационный обучающийся регулятор может модифицировать входящие силы так, что устройства регулирования по податливости будут реагировать более активно. Например, фиг. 4С и 4D показывают, что итерационные обучающиеся регуляторы увеличивают заданное сечение дроссельного регулятора врезания и искусственно увеличивают входящие силы. Увеличенные значения обеспечивают «внедрение» автономного погрузочно-транспортного средства в навал породы с более высокой скоростью и более быстрый наклон и подъем ковша. В данных примерах увеличение скоростей врезания, стрелы и ковша обеспечивает увеличение общей активности устройства управления черпанием и уменьшение изменчивости черпания по сравнению с использованием параметров, полученных от навала породы, предназначенного для обучения.
Варианты осуществления устройства управления черпанием могут быть реализованы на аналоговой и/или цифровой (аппаратной/программной) платформах. Определенные реализации могут быть предусмотрены для совместимости с существующими системами управления, автономными погрузочно-транспортными средствами, датчиками и т.д., такими, какие могут потребоваться для модернизации или совершенствования существующих систем и автономных погрузочно-транспортных средств. Например, устройство управления черпанием может быть реализовано в целом или частично посредством использования дискретных элементов, посредством использования цифровой технологии (например, в виде цифрового сигнального процессора (DSP), программируемой вентильной матрицы (FPGA) или проблемно-ориентированной/прикладной интегральной схемы (ASIC)) или использования их комбинаций. Один или более компонентов устройства управления черпанием могут быть реализованы в виде алгоритма посредством использования соответствующего языка аппаратных средств, например, такого как язык описания аппаратного обеспечения (VHDL) на быстродействующих/сверхскоростных интегральных схемах (VHSIC), язык межрегистровых пересылок (RTL) или Verilog. Такой алгоритм может быть реализован, например, в устройстве на базе программируемой вентильной матрицы (FPGA) или проблемно-ориентированной/прикладной интегральной схемы (ASIC) или другом пригодном логическом устройстве. Некоторые варианты осуществления и реализации могут включать в себя один или более датчиков или измерительных преобразователей.
Варианты осуществления будут описаны дополнительно посредством нижеследующих неограничивающих примеров.
ПРИМЕР 1
Данный пример иллюстрирует проектирование и испытание в условиях эксплуатации одного варианта осуществления алгоритма загрузки на основе регулирования по податливости с использованием сил, измеренных при взаимодействиях ковша и породы, для модифицирования скорости ковша во время черпания. В данном примере алгоритм погрузки (показанный ниже) имеет три части, соответствующие трем фазам черпания. Три фазы черпания, а именно врезание, черпание и отрыв, показаны схематически соответственно на фиг. 1В, 1С и 1D.
АЛГОРИТМ ПОГРУЗКИ
перемещение стрелы и ковша
регулируют скорость исполнительных механизмов
перемещение стрелы и ковша
Фаза врезания показана на фиг. 1В. Фаза врезания заканчивается, когда ковш находится в положении врезания, и движение автономного погрузочно-транспортного средства вперед вызывает увеличение сил реакции породы, действующих на ковш, до значений, превышающих заданное значение. Во время фазы черпания (фиг. 1С) устройство регулирования по податливости обеспечивает наклон ковша вверх или вниз для поддержания заданной силы реакции, в то время как стрела используется только для измерения сил реакции при черпании. Фаза отрыва (фиг. 1D) начинается, когда ковш будет полностью наклонен, и заканчивается, когда ковш находится в положении взвешивания. Устройство регулирования по податливости представляет собой часть алгоритма, который управляет движением ковша через навал породы. Устройство регулирования по податливости использует расхождение между измеренными силами реакции при черпании и заданной силой при черпании для изменения скорости исполнительного механизма ковша. Обобщенная блок-схема для устройства регулирования по податливости показана на фиг. 3С. В то время как любой контроллер С может быть использован для преобразования отклонения сил в скорости исполнительных механизмов, устройство регулирования по податливости в данном примере является односторонним и пропорциональным, так что
 (1)
(1)
где VA – скорость исполнительного механизма, kA>0 - пропорциональный коэффициент усиления (при регулировании по податливости), и отклонение силы задано заданной силой fT за вычетом силы fS реакции при черпании. Для данного погрузчика и навала породы величина fr была задана равной 80 кН, в то время как kA был задан равным 1,1×10-7. Данные значения были определены экспериментально путем их корректировки до тех пор, пока масса полезного груза в ковше не стала большой и постоянной. Значения также могут быть определены при использовании способов настройки в автономном режиме для устройства регулирования по податливости, при этом значения вычисляются на основе известных параметров транспортного средства и средней жесткости навала породы. Устройство регулирования было ограничено выполнением только положительных изменений скорости ковша (то есть был разрешен только наклон вверх). В данном примере это ограничение было наложено так, что никакая энергия не тратилась на придавливание породы к нижней стороне ковша (и на поддержание привода колес автономного погрузочно-транспортного средства). Однако данное ограничение не всегда является необходимым и может быть исключено в других вариантах осуществления.
Команды для приводного механизма были заданы такими, что погрузчик приводился в движение прямо в навал породы с постоянной скоростью. Положение врезания было выбрано таким, что ковш скреб по асфальтовому основанию для гарантирования проникновения ковша в навал породы при врезании. Комбинация команд для приводного механизма и положения врезания приводила к по существу постоянной глубине проникновения. После врезания дроссельный регулятор переводили в полностью открытое положение для максимизации скорости и мощности исполнительного механизма ковша, в то время как тягу для движения вперед/прямую тягу ограничивали путем применения частичного торможения. Степень торможения была задана такой, что прямая тяга обуславливала тенденцию к увеличению сил, действующих на исполнительные механизмы, что приводило к попыткам устройств регулирования по податливости уменьшить силы за счет наклона назад. Прямая тяга имеет тенденцию к «смещению» устройства регулирования к состоянию отрыва, что гарантирует то, что черпание завершится до того, как силы, действующие на ковш, увеличатся до значений, достаточных для преодоления допустимой нагрузки на исполнительные механизмы.
УСТРОЙСТВО И СПОСОБ ИСПЫТАНИЙ В ПРОИЗВОДСТВЕННЫХ УСЛОВИЯХ
Автоматизированный наземный погрузчик с грузоподъемностью 1 тонна и навал отбитой взрывом породы, представляющей собой известняк, были использованы для испытания и настройки алгоритма погрузки. Погрузчик представлял собой погрузчик Kubota R250s, который был дооснащен для автоматизации путем добавления датчиков, исполнительных механизмов и бортовых компьютерных систем. Для данного примера были использованы только датчики выдвижения стрелы и ковша и датчики давления. Удлинения исполнительных механизмов стрелы и ковша измеряли при 10 Гц посредством изготовленного на заказ датчика на эффекте Холла. Каждый датчик выдвижения/удлинения содержал два бесконтактных IP69 кодовых датчика линейного перемещения модели Honeywall SPSL225, смонтированных в изготовленном на заказ корпусе. Два датчика давления модели Measurement Specialities MSP-400 были установлены в отверстиях штока и цилиндра каждого исполнительного механизма так, что можно было рассчитать результирующую силу, действующую на исполнительные механизмы. Прием данных от датчиков давления осуществлялся при 107 Гц посредством одной платы Arduino Uno. Сообщения об удлинении исполнительного механизма и давлении, генерируемые платой Arduino Uno, передавались в центральный компьютер по сети Robot Operating System (ROS) Electric. Центральный компьютер представлял собой персональный компьютер Mini-ITX с 64-битовым процессором Intel Core i5 для работы под Ubuntu 11.10 и ROS Electric. Центральный компьютер использовал сеть ROS для публикации и подписки на информационные файлы по беспроводной сети. Алгоритм автономной погрузки работал на отдельном лэптопе с 64-битовым процессором Intel Core i5 (для работы под Ubuntu 11.10 и ROS Electric), соединенном с беспроводной сетью. Данный лэптоп также использовался для сбора данных.
В испытаниях сначала использовалось устройство регулирования с полным насыщением, после чего использовалось ненасыщенное устройство регулирования по податливости. Одна цель данных испытаний состояла в определении разницы между наклоном при максимальной скорости и использованием устройства регулирования по податливости для согласования скорости наклона с измеренными силами реакции. Как только алгоритм погрузки был настроен для данного погрузчика и навала породы, различные параметры алгоритма погрузки поддерживались постоянными для попыток черпания, проиллюстрированных на графике по фиг. 5.
Каждая попытка черпания начиналась посредством перемещения погрузчика при ручном управлении в положение перед навалом породы. Алгоритм погрузки «брал на себя» управления погрузчиком для врезания, черпания и взвешивания. Погрузчик оставляли в положении взвешивания на 5 секунд для обеспечения возможности прекращения движения ковша и полезного груза. Массу mp полезного груза рассчитывали, используя уравнение (2) и силы fboom, действующей на стрелу в положении взвешивания. Уравнение (2) было определено экспериментально посредством калибровки погрузчика с использованием известных масс.
Объем породы в ковше также проверяли путем использования видеотрансляции от беспроводной рабочей станции. Затем полезный груз сбрасывали посредством ручного управления, и погрузчик снова размещали в положении перед навалом породы.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ
Были сделаны всего 57 попыток черпания, и эффективности черпания для каждого черпания показаны на фиг. 5. Из них 23 попытки черпания были выполнены посредством наклона ковша при максимальной скорости после врезания («насыщенные»/предельные черпания), и 21 попытка черпания была выполнена посредством использования устройства пропорционального (Р) регулирования по податливости, и 13 попыток черпания были выполнены посредством использования устройства пропорционально-интегрального (PI) регулирования по податливости для согласования скорости ковша с измеренными силами реакции (регулируемые черпания). Пять «насыщенных» черпаний, два черпания при пропорциональном регулировании и два черпания при пропорционально-интегральном регулировании не удались, поскольку силы врезания были недостаточными для того, чтобы устройства регулирования по податливости с насыщением или без насыщения взяли на себя управление черпанием. «Насыщенное» черпание 18 (SI8) и черпание 11 при пропорциональном регулировании (РI1) заняли на 30 секунд больше по сравнению со средним значением соответственно вследствие проблем с беспроводной сетью и малым врезанием в навал породы. Черпания, регулируемые устройством пропорционально-интегрального регулирования, обеспечили увеличение полезного груза на 9% и заняли на 2 с больше, чем черпания при полном насыщении. Показаны попытки черпания при среднем насыщении (SI 1), пропорциональном регулировании (Р7) и пропорционально-интегральном регулировании (PI68), за которыми следуют медленные черпания (SI 8 и РI 1), черпание (PI71) при большой работе и два неудавшихся черпания (S8 и Р6).
При учете положений исполнительных механизмов, команд управления клапанами (на основе положений клапанов) и сил, действующих на исполнительные механизмы, для номинальных черпаний (SI 1 и Р7) клапаны на погрузчике имеют зону нечувствительности между ±0,5. Никакая текучая среда не могла проходить в исполнительные механизмы при любых положениях управляемых клапанов в пределах зоны нечувствительности, следовательно, любая команда в пределах зоны нечувствительности может рассматриваться как нулевое смещение клапана (закрытый клапан). «Насыщенное» черпание вызывает наклон ковша при максимальной скорости, и силы сильно колеблются. При регулируемом черпании устройство регулирования по податливости изменяет скорость наклона в зависимости от изменяющихся сил, что приводит к менее резким изменениям сил.
Для медленных черпаний (SI 8 и РI 1) отсутствие реакции исполнительного механизма на команды при полностью открытом клапане и большие силы (значительно превышающие заданные силы как при врезании, так и при черпании) при попытке SI8 указывали на проблему сетевой связи между компьютером погрузчика и лэптопом, на котором работает алгоритм погрузки. Профиль сил показывает уровень силы, приложенной к навалу посредством приводного механизма, когда ковш прекращает движение, и конечная масса полезного груза показывает, что ковш был заполнен к концу черпания. Попытка PI1 является более интересной, поскольку силы очень близки к заданной силе 80 кН в течение всего черпания. Когда силы увеличиваются до значений, превышающих заданные, устройство регулирования по податливости обеспечивает наклон ковша, что вызывает уменьшение сил и обеспечивает возможность проникновения транспортного средства глубже в навал. Когда погрузчик останавливается у навала, силы увеличиваются, и передается другая команда на наклон.
Ретроспективные данные по командам и силам для неудавшихся черпаний (S8 и Р6) показывают, что силы никогда не увеличивались до значений, превышающих силу врезания, так что устройство регулирования ковша никогда не приводилось в действие, и черпания не удались. Скорее всего, силы были малыми вследствие того, что ковш ударялся о грунт и имела место обезгрузка передних колес. Обезгрузка передних колес уменьшает тягу и силы реакции при черпании.
Работа и время черпания были рассчитаны между врезанием (после достижения заданной силы врезания) и отрывом (когда ковш наклоняется после состояния отрыва). «Мгновенная» работа (используется только текущее измеренное значение силы) была рассчитана путем использования уравнения (3), в котором Wd представляет собой работу, выполняемую исполнительными механизмами, и Fh и FC представляют собой силы при подъеме и наклоне соответственно в исполнительных механизмах стрелы и ковша, и dh и dC представляют собой смещения для каждого исполнительного механизма. Пусть n представляет собой общее число показаний датчиков и пусть подстрочный индекс i обозначает временной индекс, связанный с каждым показанием датчика. Таким образом, мгновенная работа была рассчитана как:

Средние значения эффективности черпания приведены в Таблице 1 как для «насыщенных» черпаний, так и для черпаний при пропорциональном регулировании. Время черпания резко увеличивалось, когда управление ковшом осуществлялось посредством устройства пропорционального регулирования по податливости, по сравнению с тем, когда ковш перемещался при его максимальной скорости. Однако все регулируемые черпания были более согласованными, чем «насыщенные» черпания, и масса полезного груза увеличилась на 10%.
Wd [Н м]
Md [кг]
729±176
654±384
444±107
721±170
-61%
+10%
Интегральная работа была рассчитана путем использования уравнения (4), в котором используются как текущее показание силы, так и последнее показание силы в уравнении интегральной работы:

Результаты представлены в Таблице 2.
Wd [Н м]
Md [кг]
24458±8495
721+326
+15%
0,2%
28145+6711
719±170
-3%
+10%
27287+14511
792+335
Wd [Н м]
Md [кг]
25658±8697
784+254
+15%
0,2%
29551±1929
755+40
+8%
+22%
32246+8760
924+85
ПРИМЕР 2
Ключевые параметры для фаз врезания и черпания, выполняемых автономным погрузочно-транспортным средством, могут быть идентифицированы как положение дроссельного регулятора врезания и заданные силы, действующие на стрелу и ковш. Заданные профили сил, такие как показанные на фиг. 6А и 6В, могут быть использованы в качестве основы для разделения итерационного обучающегося регулятора для управления погрузкой на две части: итерационный обучающийся регулятор для управления врезанием, который управляет дроссельным регулятором врезания, и итерационный обучающийся регулятор для устройства регулирования по податливости, который модифицирует измеренные силы, вводимые в устройства регулирования по податливости.
ИТЕРАЦИОННЫЙ ОБУЧАЮЩИЙСЯ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ВРЕЗАНИЕМ
Итерационный обучающийся регулятор для управления врезанием сравнивал наклон профиля сил при врезании, действующих на стрелу, с наклоном заданного профиля сил при врезании, как показано на фиг. 7. Увеличение сил до значений менее 100 кН/с показывает, что навал породы создал меньшее сопротивление по сравнению с навалом породы, предназначенным для обучения, в то время как увеличение сил до значений выше данного заданного значения указывает на навал с более высоким сопротивлением. Коррекция для навала с меньшим сопротивлением может быть обеспечена путем регулирования дроссельного регулятора врезания в соответствии с зависимостью, показанной в уравнении 5.
CДроссельный регулятор врезания=
В уравнении (5) Γврезание представляет собой любое заданное устройство регулирования, которое преобразует отклонение енаклон при врезании в приращение открытия дроссельного регулятора, упоминаемое как корректировка СДроссельный регулятор врезания для дроссельного регулятора врезания. Самое простое устройство регулирования представляет собой устройство пропорционального регулирования врезания, которое осуществляет линейное преобразование отклонения наклона профиля в корректирующее приращение открытия дроссельного регулятора. i представляет собой число циклов черпания, подлежащих рассмотрению, wi - возможный вес, присваиваемый каждому отклонению наклона профиля при врезании. Данное значение веса может быть использовано для смещения корректировки к заданному множеству показаний отклонений наклона профиля при врезании. Например, самые последние отклонения наклона профиля при врезании, вероятно, лучше всего характеризуют текущее состояние навала породы. Например, вес, который экспоненциально уменьшается относительно i, может быть использован для присваивания наибольших весов самым последним испытаниям.
Уравнение 6 показывает конкретный пример итерационного обучающегося регулятора для управления врезанием, в котором отклонения наклона профиля для пяти попыток черпания умножаются на экспоненциально уменьшающийся вес и суммируются перед умножением на пропорциональный коэффициент усиления при врезании.
CДроссельный регулятор врезания = 
После пяти дополнительных попыток врезания начальная корректировка будет забыта, и текущая корректировка будет базироваться на пяти более поздних наклонах профиля при врезании. Аналогичный итерационный обучающийся регулятор используется для применения корректировки для измеренных сил, вводимых в устройства регулирования по податливости.
ИТЕРАЦИОННЫЙ ОБУЧАЮЩИЙСЯ РЕГУЛЯТОР ДЛЯ РЕГУЛИРОВАНИЯ ПО ПОДАТЛИВОСТИ
Итерационный обучающийся регулятор для регулирования по податливости сравнивает рассчитанные силы с заданными силами и использует результат для модифицирования сил, используемых устройствами регулирования по податливости. Приведенный в качестве примера профиль сил показан на фиг. 8. Суммарное расхождение eF Net между измеренными силами и заданными силами вычисляют, используя уравнение 7.
eF Net=
И в данном случае интеграл разности сил (FЗаданная – FИзмеренная) берется по продолжительности черпания между tначало и tконец. Корректировка СИзмеренные силы измеренных сил, определяемая итерационным обучающимся регулятором для регулирования по податливости, рассчитывается с использованием уравнения 8.
СИзмеренные силы =
И в данном случае экспоненциально затухающий член используется для смещения корректировки к пяти самым последним попыткам черпания, но может быть учтено любое число попыток черпания, и все они могут иметь равный вес. ϒподатливость представляет собой коэффициент усиления итерационного обучающегося регулятора для регулирования по податливости. Любой обычный контроллер/регулятор с коэффициентом усиления ϒподатливость может быть использован вместо пропорционального регулятора с коэффициентом усиления ϒподатливость.
Преимущество итерационных обучающихся регуляторов заключается в том, что после того как параметры устройства регулирования по податливости будут настроены для заданного транспортного средства и навала породы, их никогда не потребуется снова настраивать. Каждый из итерационных обучающихся регуляторов, рассмотренных в данном разделе, имеет только два параметра: число i предыдущих попыток черпания и коэффициенты y усиления итерационных обучающихся регуляторов. Другой способ рассмотрения коэффициентов усиления итерационных обучающихся регуляторов - это рассмотрение с точки зрения активности всего алгоритма черпания (устройства регулирования по податливости и итерационного обучающегося регулятора).
Если коэффициенты усиления итерационных обучающихся регуляторов большие, устройства регулирования по податливости будут реагировать более активно на изменения в навале породы, и, если коэффициенты усиления итерационных обучающихся регуляторов малы, устройства регулирования будут реагировать менее активно. Данный уровень регулирования идеален для операторов, поскольку исходя из общих целей погрузки может быть настроена одна величина. Если полезный груз погрузочно-доставочной машины ниже заданного массового расхода мельницы/дробилки, оператор может увеличить активность устройства регулирования путем увеличения коэффициентов усиления итерационных обучающихся регуляторов. Если массовый расход превышает тот, с которым может справляться мельница/дробилка, коэффициенты усиления итерационных обучающихся регуляторов могут быть уменьшены, например, для обеспечения экономии на износе шин и расходе топлива.
Содержание всех ссылочных материалов, приведенных в данном документе, настоящим специально включено в данный документ путем ссылки.
ЭКВИВАЛЕНТЫ
Специалисты в данной области техники смогут идентифицировать или выявить разновидности вариантов осуществления, описанных в данном документе. Подобные разновидности находятся в пределах объема изобретения и охватываются приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКТИВНОЙ ВЫЕМКИ РУД | 2013 |
|
RU2537451C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В МЕХАНИЗМЕ ЭКСКАВАТОРА | 2012 |
|
RU2521625C2 |
| Способ управления процессом черпания | 1978 |
|
SU785437A1 |
| ПОГРУЗОЧНО-ТРАНСПОРТНАЯ МАШИНА | 2005 |
|
RU2298103C1 |
| Система управления рабочим процессом погрузчика | 1985 |
|
SU1355679A1 |
| Гидропривод ковшового погрузчика | 1979 |
|
SU1273463A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ЭКСКАВАТОРНО-БУНКЕРНЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2204720C2 |
| Ковшовая погрузочная машина | 1979 |
|
SU826027A2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2012 |
|
RU2596386C2 |
| Устройство для управления рабочей машиной | 2014 |
|
RU2658708C1 |










Изобретение относится к устройству управления черпанием и способу управления черпанием для автономного погрузочно-транспортного средства (ALV), используемого в таких применениях, как разработка месторождений, строительство и разведочные работы. Варианты осуществления могут содержать по меньшей мере один контроллер, который управляет ковшом и/или автономным погрузочно-транспортным средством в соответствии с по меньшей мере одним сигналом датчика, при этом данный по меньшей мере один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания. Некоторые варианты осуществления включают в себя по меньшей мере одно устройство регулирования по податливости и, если требуется, по меньшей мере один итерационный обучающийся регулятор (ILC), который использует обратную связь от по меньшей мере одного предыдущего черпания для модифицирования данного по меньшей мере одного сигнала датчика, выдаваемого данному по меньшей мере одному контроллеру. 4 н. и 21 з.п. ф-лы, 20 ил., 2 табл.
1. Устройство управления черпанием, предназначенное для автономного погрузочно-транспортного средства (ALV), применяемого в горнодобывающей и строительной отраслях, содержащее:
по меньшей мере один контроллер, управляющий ковшом и/или автономным погрузочно-транспортным средством в соответствии с алгоритмом загрузки на основе регулирования по податливости с использованием по меньшей мере одного сигнала датчика, при этом по меньшей мере один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания;
при этом по меньшей мере один сигнал датчика получают от по меньшей мере одного датчика, взаимодействующего с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или с одним или более приводными элементами, причем по меньшей мере один сигнал датчика получают путем измерения силы, воспринимаемой исполнительным механизмом стрелы, причем по меньшей мере один контроллер выполнен с возможностью преобразования сигнала, характеризующего силу, в изменение в движении ковша.
2. Устройство управления черпанием по п. 1, в котором по меньшей мере один контроллер содержит по меньшей мере одно устройство регулирования по податливости.
3. Устройство управления черпанием по п. 1, в котором конечный полезный груз регулируется посредством модифицирования параметра, соответствующего фазе отрыва при черпании.
4. Устройство управления черпанием по п. 1, в котором по меньшей мере один сигнал датчика получают путем измерения силы, воспринимаемой приводным элементом.
5. Устройство управления черпанием по п. 2, в котором устройство регулирования по податливости содержит устройство адаптивного регулирования по податливости.
6. Устройство управления черпанием по п. 5, в котором устройство адаптивного регулирования по податливости динамически регулирует по меньшей мере один параметр в ответ на различие между сигналом датчика и заданным сигналом.
7. Устройство управления черпанием по п. 1, в котором по меньшей мере один контроллер преобразует один или более сигналов датчика в диапазон возможных скоростей ковша или скоростей автономного погрузочно-транспортного средства посредством использования по меньшей мере одного из пропорционального, интегрального и дифференциального регулирования.
8. Устройство управления черпанием по п. 1, содержащее по меньшей мере один итерационный обучающийся регулятор (ILC), который использует обратную связь от по меньшей мере одного предыдущего черпания для модифицирования по меньшей мере одного сигнала датчика, выдаваемого по меньшей мере одному контроллеру.
9. Устройство управления черпанием, предназначенное для автономного погрузочно-транспортного средства (ALV), применяемого в горнодобывающей и строительной отраслях, содержащее:
по меньшей мере один контроллер, управляющий ковшом и/или автономным погрузочно-транспортным средством в соответствии с алгоритмом загрузки на основе регулирования по податливости с использованием по меньшей мере одного сигнала датчика, при этом по меньшей мере один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, причем по меньшей мере один сигнал датчика получают путем измерения силы, воспринимаемой исполнительным механизмом стрелы; и
по меньшей мере один итерационный обучающийся регулятор (ILC), который использует обратную связь от по меньшей мере одного предыдущего черпания для модифицирования по меньшей мере одного сигнала датчика, выдаваемого по меньшей мере одному контроллеру,
при этом по меньшей мере один контроллер выполнен с возможностью преобразования сигнала, характеризующего силу, в изменение в движении ковша.
10. Устройство управления черпанием по п. 9, в котором по меньшей мере один контроллер содержит по меньшей мере одно устройство регулирования по податливости.
11. Устройство управления черпанием по п. 10, в котором устройство регулирования по податливости содержит устройство адаптивного регулирования по податливости.
12. Устройство управления черпанием по п. 9, содержащее первый итерационный обучающийся регулятор скорости, изменяющий скорость автономного погрузочно-достаточного транспортного средства на основе сигнала датчика, характеризующего взаимодействие между ковшом и навалом породы во время по меньшей мере одного предыдущего черпания, и второй итерационный обучающийся регулятор, модифицирующий сигнал датчика, полученный исходя из измерения отклонения силы, действующей на ковш и стрелу при по меньшей мере одном предыдущем черпании.
13. Устройство управления черпанием по п. 9, включающее в себя первый итерационный обучающийся регулятор, модифицирующий сигнал датчика, выдаваемый устройству регулирования стрелы по податливости, и второй итерационный обучающийся регулятор, модифицирующий сигнал датчика, выдаваемый устройству регулирования ковша по податливости, при этом модифицирование базируется на обратной связи от по меньшей мере одного предыдущего черпания.
14. Устройство управления черпанием по п. 9, в котором по меньшей мере один итерационный обучающийся регулятор преобразует сигнал от предыдущего черпания в изменения выходного сигнала устройства управления черпанием посредством использования по меньшей мере одного из пропорционального, интегрального и дифференциального регулирования.
15. Энергонезависимый носитель информации, совместимый с компьютером, предназначенный для использования вместе с устройством управления черпанием, предназначенным для автономного погрузочно-транспортного средства и содержащим компьютер, при этом носитель хранит компьютерную программу, содержащую команды для управления компьютером для выполнения одного или более из:
получения по меньшей мере одного сигнала датчика от по меньшей мере одного датчика, взаимодействующего с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или одним или более приводными элементами;
при этом по меньшей мере один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, причем по меньшей мере один сигнал датчика получают путем измерения силы, воспринимаемой исполнительным механизмом стрелы;
преобразования сигнала, характеризующего силу, в изменение в движении ковша и
управления ковшом и/или автономным погрузочно-транспортным средством в соответствии с алгоритмом загрузки на основе регулирования по податливости с использованием по меньшей мере одного сигнала датчика.
16. Способ управления автономным погрузочно-транспортным средством (ALV), применяемым в горнодобывающей и строительной отраслях, в котором осуществляют:
получение по меньшей мере одного сигнала датчика от по меньшей мере одного датчика, взаимодействующего с одним или более исполнительными механизмами, отличными от исполнительного механизма ковша, или одним или более приводными элементами;
при этом по меньшей мере один сигнал датчика характеризует взаимодействие между ковшом и навалом породы во время черпания, причем по меньшей мере один сигнал датчика получают путем измерения силы, воспринимаемой исполнительным механизмом стрелы;
преобразование сигнала, характеризующего силу, в изменение в движении ковша и
управление ковшом и/или автономным погрузочно-транспортным средством в соответствии с алгоритмом загрузки на основе регулирования по податливости с использованием по меньшей мере одного сигнала датчика.
17. Способ по п. 16, в котором обеспечивают получение по меньшей мере одного сигнала датчика посредством измерения силы, приложенной исполнительным механизмом стрелы, или посредством измерения деформации в приводном элементе.
18. Способ по п. 16, в котором модифицируют по меньшей мере один сигнал датчика, выдаваемый устройству управления/контроллеру, так, что скорость ковша или скорость автономного погрузочно-транспортного средства изменяются.
19. Способ по п. 16, в котором управление дополнительно включает динамическое регулирование по меньшей мере одного параметра в ответ на различие между сигналом датчика и заданным сигналом.
20. Способ по п. 16, в котором дополнительно осуществляют управление по меньшей мере одним из перемещения ковша автономного погрузочно-транспортного средства в по меньшей мере одно выбранное положение и перемещение автономного погрузочно-транспортного средства относительно навала породы.
21. Способ по п. 16, в котором дополнительно обеспечивают изменение скорости автономного погрузочно-транспортного средства на основе сигнала датчика, характеризующего взаимодействие между ковшом и навалом породы во время по меньшей мере одного предыдущего черпания, и модифицируют сигнал датчика, полученного исходя из измерения отклонения силы, действующей на ковш и стрелу при по меньшей мере одном предыдущем черпании.
22. Способ по п. 16, в котором дополнительно модифицируют сигнал датчика, выдаваемый устройству регулирования стрелы по податливости, и модифицируют сигнал датчика, выдаваемый устройству регулирования ковша по податливости, при этом модифицирование базируется на обратной связи от по меньшей мере одного предыдущего черпания.
23. Способ по п. 16, в котором управление включает преобразование суммарного отклонения силы в диапазон возможных измеренных сил посредством использования по меньшей мере одного из пропорционального, интегрального и дифференциального регулирования.
24. Способ по п. 16, в котором дополнительно преобразуют сигнал от предыдущего черпания в изменения в выходном сигнале устройства управления черпанием посредством использования по меньшей мере одного из пропорционального, интегрального и дифференциального регулирования.
25. Способ по п. 16, в котором дополнительно осуществляют регулирование конечного полезного груза посредством модифицирования параметра, соответствующего фазе отрыва при черпании.
| US 5682312 A1, 28.10.1997 | |||
| US 7630793 B2, 08.12.2009 | |||
| US 2008097672 А1, 24.04.2008 | |||
| US 5493798 A1, 27.02.1996 | |||
| СИСТЕМА И СПОСОБ СБОРА ДАННЫХ И УПРАВЛЕНИЯ ЭКСКАВАТОРОМ | 1996 |
|
RU2158952C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНШЕЙНЫМ ЭКСКАВАТОРОМ | 1995 |
|
RU2141907C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ИНСТРУКЦИЯМИ ПО ЭКСПЛУАТАЦИИ ВОДИТЕЛЯ РАБОЧЕЙ МАШИНЫ | 2008 |
|
RU2488663C2 |

