ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Область настоящего изобретения относится к способу и устройству для автоматизированной сердечно-легочной реанимации (CPR, СЛР), а также к компьютерному программному продукту, содержащему постоянный используемый компьютером носитель, на котором хранится логика управления, чтобы инструктировать приемопередатчик выполнять способ автоматизированной CPR.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Внезапная остановка сердца (SCA) остается одной из главных причин смерти в западном мире. Возникающая в результате ишемия всего тела после SCA нарушает широкий диапазон клеточных процессов, приводя к тяжелому повреждению клеток и смерти, если не будет оказана неотложная медицинская помощь. Сообщается, что вероятность выживания после внезапной остановки сердца снижается линейно на 7-10% за каждую минуту остановки сердца.
Процедура сердечно-легочной реанимации (CPR) может выполняться всякий раз, когда пациент испытывает внезапную остановку сердца. Процедура состоит в выполнении регулярных и ритмических сжатий грудной клетки нажатием на грудину пациента со скоростью 100 нажатий в минуту. Для успешной CPR требуется, чтобы к грудной клетке прикладывалась большая сила и вручную может быть очень трудно выполнять соответствующие высококачественные сжатия грудной клетки. Поскольку CPR является ключом для выживания, были разработаны механические автоматизированные устройства (A-CPR), чтобы заменить менее надежную, часто прерываемую, трудно управляемую и иногда длительную по продолжительности CPR.
На рынок были представлены различные автоматизированные устройства CPR. Первый тип устройства CPR использует такие способы, как пневматику, чтобы приводить в действие компрессионную накладку на грудную клетку пациента. Другой тип автоматизированной CPR приводится в действие электрически и использует большую ленту вокруг грудной клетки пациента, которая ритмично ее сжимает, чтобы осуществлять сжатие грудной клетки. Частота сжатия фиксируется и управляется и могут быть достигнуты высококачественные сжатия грудной клетки.
Автоматизированные системы часто вызывают травмы, такие как поломка ребер, повреждения кожи и все виды травм. Важными проблемами в устройствах CPR являются длительное время установки, низкая стабильность во время работы устройства, а также предположения и клинические данные, что для достижения оптимальных характеристик прикладывается недостаточная сила.
Во время CPR возможно, что грудная клетка не возвращается точно в то же самое положение, в котором начиналось сжатие, и что положение точки возвращения грудной клетки может меняться во времени на несколько сантиметров в ходе реанимации. Это может происходить под действием непрерывных больших сил сжатия. Это упоминается как эффект формования.
Оптимальные сжатия грудной клетки могут быть получены только когда компрессионная накладка/привод находится в контакте с грудной клеткой в начале сжатия. Однако во время CPR диаметр грудной клетки пострадавшего может уменьшиться за счет поломки ребер или формования под действием непрерывных больших сил сжатия. Если компрессионный привод всегда оттягивается в фиксированное положение, между приводом и грудной клеткой может возникать зазор.
Также обычным является то, что во время CPR пациенту должна обеспечиваться вентиляция легких. Когда легкие пациента вентилируются, его грудная клетка поднимается приблизительно на сантиметр за счет такой вентиляции легких. Когда компрессионный привод в промежутках между сжатиями грудной клетки фиксируется в его нулевом положении, движение грудной клетки за счет вентиляции легких ограничивается из-за фиксированного привода, ставя под угрозу эффект от вентиляции легких.
Соответственно, существует необходимость в улучшенном устройстве и способе автоматизированной CPR для выполнения автоматизированной CPR, которая позволяет получить оптимальные сжатия грудной клетки.
Другая задача настоящего раскрытия заключается в обеспечении улучшенных устройства и способа автоматизированной CPR для выполнения автоматизированной CPR, позволяющей проведение оптимальной вентиляции легких в ходе реанимации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее раскрытие предлагает способ автоматизированной CPR, содержащий этапы, на которых:
управляют положением компрессионного элемента во время движения компрессионного элемента из первого начального положения первого цикла сжатия в первое положение сжатия, соответствующее первой глубине сжатия, и обратно в исходное положение компрессионного элемента, и после того, как исходное положение достигнуто, управляют силой, приложенной к компрессионному элементу, пока не начнется второй цикл сжатия.
В первом аспекте раскрытия управление силой, приложенной к компрессионному элементу, содержит приложение силы противодействия.
В еще одном аспекте раскрытия компрессионный элемент приводится в действие двигателем и в нем управление силой, приложенной к компрессионному элементу, содержит ограничение мощности двигателя. Мощность может ограничиваться, применяя ограниченный ток двигателя.
Способ в одном из аспектов раскрытия дополнительно содержит вычисление второй глубины сжатия для второго цикла сжатия, в котором конечное положение первого цикла сжатия является вторым начальным положением компрессионного элемента для второго цикла сжатия.
В еще одном аспекте раскрытия способ автоматизированной CPR может содержать ограничение разности между первой глубиной сжатия и второй глубиной сжатия до максимального отклонения глубины.
Максимальное отклонение глубины может находиться в диапазоне 1-3 см.
В другом аспекте раскрытия управление положением и/или управление силой разрешены в фиксированные разрешающие моменты времени.
В фиксированные запрещающие моменты времени могут быть также запрещены управление положением и/или управление силой.
Переходный период может обеспечиваться между управлением положением компрессионного элемента и управлением силой, приложенной к компрессионному элементу.
В дополнительном аспекте текущего раскрытия управление силой выполняется в течение временного окна, содержащегося приблизительно между 0,2 с и приблизительно 0,6 с.
В еще одном дополнительном аспекте настоящего раскрытия способ автоматизированной CPR содержит анализ положения компрессионного элемента во время управления силой, приложенной на компрессионном элементе.
Настоящее раскрытие также предлагает компьютерный программный продукт, содержащий постоянный, используемый компьютером носитель, на котором хранится логика управления, чтобы инструктировать приемопередатчик выполнять способ автоматизированной CPR в соответствии с настоящим раскрытием.
Согласно раскрытию, устройство автоматизированной CPR содержит компьютерный программный продукт, содержащий постоянный, используемый компьютером носитель с хранящейся на нем логикой управления, чтобы инструктировать приемопередатчик выполнять способ автоматизированной CPR, соответствующий настоящему раскрытию.
Раскрытие также предлагает устройство для автоматизированной CPR. Устройство для автоматизированной CPR содержит элемент CPR, содержащий компрессионный элемент, выполненный с возможностью приложения силы сжатия к грудной клетке пациента, и элемент управления, выполненный с возможностью управления положением компрессионного элемента во время движения компрессионного элемента из первого начального положения первого цикла сжатия в первое положение сжатия, соответствующее первой глубине сжатия, и обратно в исходное положение компрессионного элемента, и управления силой, прикладываемой к компрессионному элементу, после того, как достигнуто исходное положение, и пока не начнется второй цикл сжатия.
Соответственно, в соответствии с настоящим раскрытием, управление силой вставляется между управлением положением во время сжатий. Это позволяет компрессионному элементу оставаться в контакте с грудной клеткой в течение всего времени во время циклов сжатия, в то же время позволяя полное движение грудной клетки во время вентиляции легких, если выполняется вентиляция.
Эти и другие варианты изобретения станут очевидны и будут поясняться со ссылкой на описанный здесь далее вариант(-ы) осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
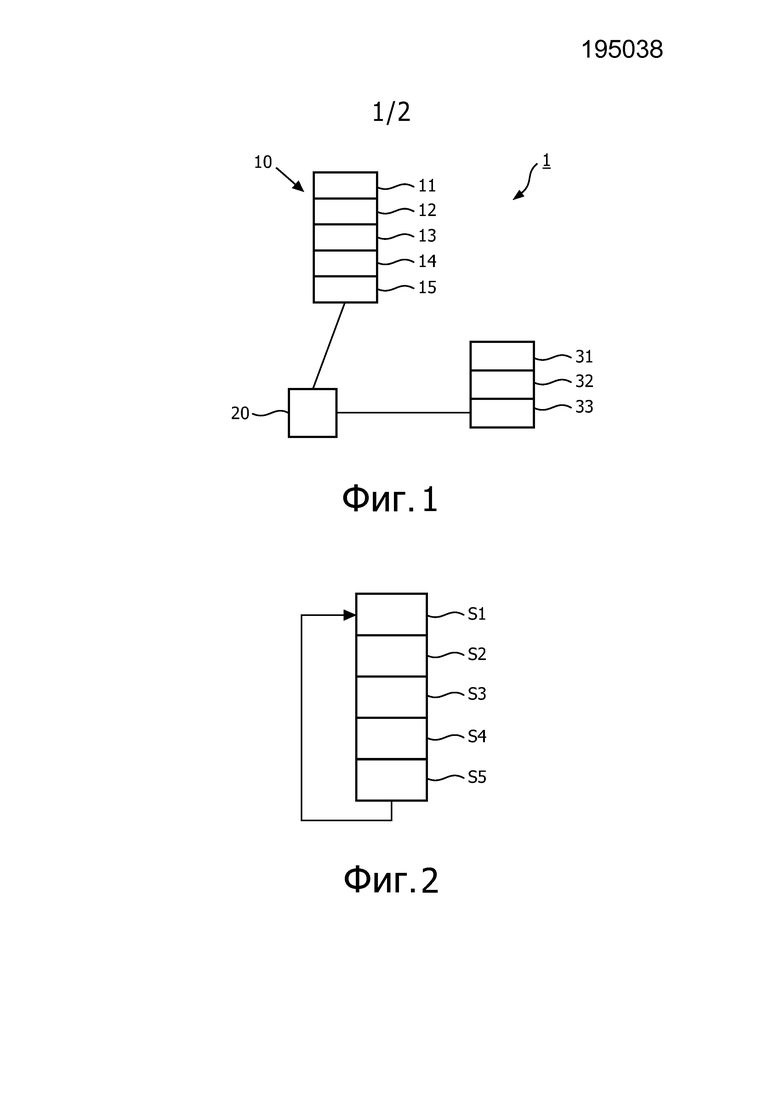
Фиг.1 - устройство для автоматизированной CPR, соответствующее одному аспекту раскрытия,
Фиг.2 - блок-схема последовательности осуществления операций способа согласно одному аспекту раскрытия, как предложено в соответствии с раскрытыми здесь принципами,
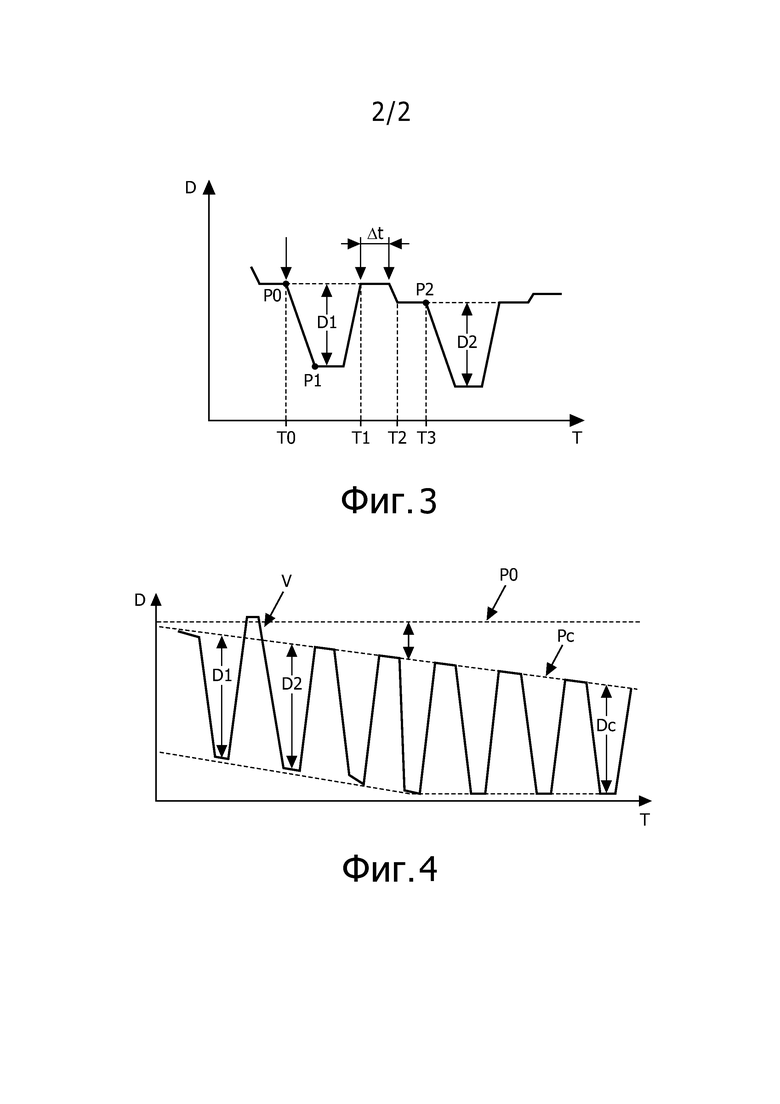
Фиг.3 - положение компрессионного элемента во времени для двух циклов сжатия, как показано на фиг.2, в соответствии с одним аспектом раскрытия,
Фиг.4 - положение компрессионного элемента во времени для семи циклов сжатия, как показано на фиг.2, согласно раскрытым в нем принципам.
Для полного понимания того, что предлагается и каковы преимущества этого, ссылка теперь делается на следующее подробное описание, рассматриваемое в сочетании с чертежами.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Теперь изобретение будет теперь описано на основе чертежей. Следует понимать, что варианты осуществления и аспекты изобретения, описанные здесь, являются только примерами и никоим образом не ограничивают объем защиты формулы изобретения. Изобретение определяется формулой изобретения и ее эквивалентами. Следует также понимать, что признаки одного аспекта могут объединяться с признаком другого аспекта или аспектов.
На фиг.1 представлено устройство 1 для автоматизированной CPR, соответствующее одному аспекту раскрытия.
Устройство 1 выполнено с возможностью циклического сжатия и освобождения грудной клетки пациента. Устройство 1 содержит элемент 10 CPR, выполненный с возможностью сжатия/освобождения грудной клетки пациента, и элемент 20 управления, выполненный с возможностью управления элементом 10 CPR для циклического проведения сжатий. Цикл сжатия содержит фазу сжатия, когда грудная клетка сжимается, время задержки, когда глубина сжатия остается на максимальной глубине, фазу освобождения, во время которой грудная клетка восстанавливается, и время ожидания, когда грудная клетка остается на естественном нулевом уровне.
Элемент 10 CPR устройства 1, показанного на фиг.1, содержит подвижный блок или рычаг 11, выполненный с возможностью движения вперед-назад вдоль передней структуры, опору 12 для спины 12, располагающуюся за спиной пациента, накладку 13 для грудной клетки, соединенную с рычагом 11 и выполненную с возможностью передачи силы сжатия к грудной клетке пациента, и средство 14 привода, выполненное с возможностью привения в действие подвижного блока 11 вперед-назад во время работы, так чтобы накладка 13 для грудной клетки циклически сжимала грудную клетку пациента.
Средство 14 привода выбирается из группы, содержащей электромагнитный, пневматический или гидравлический двигатель, который обеспечивает либо вращательную силу, либо линейную силу, и преобразует ее в поступательное или линейное движение накладки 13 для грудной клетки в направлении грудной клетки. В предпочтительном аспекте раскрытия средство 14 привода имеет форму электрического двигателя. Глубина сжатия может быть определена, используя датчики Холла на двигателе 14, в которых каждый отсчет означает определенное значение глубины.
Следует понимать, что могут быть рассмотрены и другие варианты осуществления элемента 10 CPR, показанного на фиг.1. Например, элемент 10 CPR может содержать пневматически приводимый в движение компрессорный блок, который возвратно-поступательно приводит в движение накладку 13 для грудной клетки, чтобы механически сжимать/освобождать грудную клетку пациента. Во время процедуры CPR пациент лежит в положении на спине. Компрессорный блок механически удерживается вертикально над грудной клеткой пациента, так что контактная накладка находится в механическом контакте с грудной клеткой пациента примерно на грудине.
Возвращаясь к фиг.1, устройство 1 для автоматизированной CPR может также содержать выходной элемент 15 для вывода информации или сигнала, представляющих выполняемую CPR. Выходной элемент 15 может включать в себя устройство, которое выводит информацию оператору, такое как дисплей, громкоговоритель и т. д.
Следует понимать, что устройство 1 может включать в себя другие компоненты, такие как устройство 31 памяти, шина 32 и интерфейс 33 связи, а также другие компоненты (не показаны), оказывающие помощь в получении, передаче и/или обработке данных. Кроме того, следует понимать, что возможны и другие конфигурации.
Устройство 31 памяти может включать в себя оперативную память (RAM) или другой тип динамического запоминающего устройства, которое хранит информацию и команды для выполнения элементом 10 управления, постоянную память (ROM) или другой тип статического запоминающего устройства, которое хранит статическую информацию и команды для элемента 10 управления, и/или некоторый другой тип магнитного или оптического носителя записи и его соответствующий привод для хранения информацию и/или команд.
Шина 32 может позволить осуществление связи между компонентами устройства 1.
Интерфейс 33 связи может включать в себя любой подобный приемопередатчику механизм, позволяющий устройству 1 связываться с другими устройствами и/или системами. Например, интерфейс 33 связи может содержать механизмы для связи с другими устройствами контроля, такими как устройство контроля ЭКГ.
Как будет описано ниже подробно со ссылкой на фиг.2-4, устройство 1 выполнено с возможностью выполнения управления, связанного с приложением сжатий к пациенту. Устройство 1 может выполнять эти и другие функции в ответ на выполнение элементом 20 управления команд программного обеспечения, содержащихся на считываемом компьютером носителе, таком как устройство памяти.
Считываемый компьютером носитель может быть определен как одно или более устройств памяти и/или несущих волн. Команды программного обеспечения могут считываться в устройство 31 памяти с другого считываемого компьютером носителя или с другого устройства через интерфейс 33 связи. Команды программного обеспечения, содержащиеся в устройстве 31 памяти, могут инструктировать элемент 20 управления устройства 1 выполнять процессы, которые будут описаны позже со ссылкой на фиг.2-4.
Альтернативно, аппаратная схема может использоваться вместо или в комбинации с командами программного обеспечения, чтобы реализовать процессы, совместимые с принципами изобретения. Таким образом, системы и способы, совместимые с принципами изобретения, не ограничиваются никакой конкретной комбинацией аппаратных средств и программного обеспечения.
Элемент 20 управления выполнен с возможностью управления элементом 10 CPR. Элемент 20 управления может включать в себя любой тип процессора или микропроцессора, который интерпретирует и выполняет команды. В других реализациях элемент 20 управления может быть осуществлен как специальная интегральная схема (ASIC), программируемая логическая вентильная схема (FPGA) и т.п. или иметь такие схемы в своем составе.
На фиг.2 представлена блок-схема последовательности выполнения операций способа автоматизированной CPR в одном аспекте раскрытия. Способ автоматизированной CPR описывается со ссылкой на фиг.3 и фиг.4. На фиг.3 показано состояние компрессионного элемента во времени для двух циклов сжатия, и на фиг.4 показано состояние компрессионного элемента во времени для различных циклов сжатия в одном аспекте раскрытия.
Способ, соответствующий этому аспекту раскрытия, описывается для устройства 1 для автоматизированной CPR, содержащего компрессионный элемент в форме накладки 13 для грудной клетки, соединенной с подвижным рычагом 11, циклически сжимающим/отпускающим грудную клетку пациента, и электрический двигатель 14, приводящий в движение подвижной рычаг 11. Это не ограничивает настоящее изобретение и принципы, раскрытые в нем, могут также применяться к другим конфигурациям устройств, адаптированным к автоматизированной CPR, имеющей электрический двигатель 14, чтобы приводить в движение компрессионный элемент.
На первом этапе S1 в начальный момент T0 сжатия накладка 13 для грудной клетки предпочтительно находится в контакте с грудной клеткой пациента в первом начальном положении P0. Элемент 20 управления приводит в действие управление положением для управления положением компрессионного элемента, то есть накладки 13 для грудной клетки, соединенной с подвижным элементом 11. Управление положением направлено на обеспечение того, чтобы импульс сжатия для перемещения подвижного рычага 11 в первое положение P1, соответствующее первой глубине D1 сжатия, проходил оптимально. Начальное положение Р0 накладки для грудной клетки, также называемое начальным нулевым положением, запоминается.
На втором этапе S2 элемент 20 управления посылает импульс сжатия на средство 14 привода, выполненное с возможностью приведения в движение подвижного рычага 11 и накладки 13 для грудной клетки, чтобы сжимать или освобождать грудную клетку пациента. В результате накладка 13 для грудной клетки переходит в первое положение P1, соответствующее упомянутой первой глубине D1 сжатия, чтобы сжать грудную клетку, и затем обратно в исходное положение (предпочтительно, в первое начальное положение P0) во время перемещения обратно грудной клетки после сжатия.
Следует понимать, что глубина сжатия может зависеть от свойств конкретного пациента и его тела или грудной клетки. Как правило, глубина сжатия имеет порядок 4-6 см.
В предпочтительном аспекте раскрытия средство 14 привода имеет форму электрического двигателя. Расстояние, перекрываемое подвижным рычагом 11 или накладкой 13 для грудной клетки во время сжатия, может быть определено, используя датчики Холла электрического двигателя 14, у которых каждый отсчет означает определенное значение глубины. Когда подвижный рычаг или накладка 13 для грудной клетки преодолела эффективное расстояние, соответствующее первой глубине D1 сжатия, подвижный рычаг 11 или накладка 13 для грудной клетки может удерживаться в течение определенного времени, при котором глубина сжатия остается на максимальной глубине, после чего движется обратно, позволяя, таким образом, производить освобождение грудной клетки. Однако это не является ограничением и для считывания и управления расстоянием, проходимым подвижным рычагом 11 и накладкой 13 для грудной клетки, могут быть рассмотрены другие решения.
На этапе S3, когда накладка 13 для грудной клетки возвращается обратно в исходное положение, элемент 20 управления запрещает управление положением (момент T1 на фиг.3) и активирует на этапе S4 управление силой (момент T2 на фиг.3). Управление силой выполнено с возможностью управления силой, приложенной к накладке 13 для грудной клетки, пока не начнется следующий цикл сжатия.
Управление силой выполнено с возможностью добавления противодействующей силы к грудной клетке для обеспечения того, чтобы накладка 13 для грудной клетки оставалась в контакте или восстанавливала контакт с грудной клеткой, позволяя грудной клетке двигаться за счет вентиляции, если такая вентиляция выполняется. Восстановление контакта имеет место, когда накладка 13 для грудной клетки оттягивается в свое первоначальное положение, куда грудная клетка сама не возвращается полностью из-за эффекта формования. Следует понимать, что управление силой разрешается после каждого цикла сжатия, независимо от того, должна ли выполняться вентиляция или нет.
В действительности, при типичной процедуре CPR вентиляция легких пациента проводится каждые 30 циклов сжатия.
Сила противодействия может устанавливаться, прикладывая ограниченный ток к двигателю 14, который, в свою очередь, прикладывает ограниченную силу к компрессионной накладке 13. Это может быть сделано ограничением тока двигателя 14, ограничивая, таким образом, силу или мощность двигателя. Например, сила противодействия может быть установлена подачей фиксированного тока через обмотки двигателя 14. Альтернативно, сила противодействия может быть установлена, адаптируя фиксированный ток к выходу датчика силы. Эти примеры не ограничивают настоящее раскрытие.
Следует понимать, что сила противодействия должна быть относительно малой, с амплитудой силы противодействия приблизительно 1-50 Н, предпочтительно приблизительно 20 Н. Сила противодействия направлена на то, чтобы гарантировать, что накладка 13 для грудной клетки не блокирует перемещение грудной клетки, поднимающейся во время вентиляции, в то же время позволяя накладке для грудной клетки оставаться в контакте во время движения грудной клетки за счет вентиляции.
В одном аспекте раскрытия управление положением и силой разрешаются в фиксированные моменты времени во время CPR. Предпочтительно, сила противодействия прикладывается в течение временного окна, обычно между 0,2 с и 0,6 с.
Управление силой применяется в течение фиксированного времени. Положение восстановления грудной клетки после этого фиксированного времени и, возможно, после вентиляции является новым начальным положением P2 накладки 13 для грудной клетки для следующего цикла сжатия.
На этапе S5 управление силой запрещается, а управление положением разрешается для следующего цикла сжатия. Элемент 20 управления определяет следующую глубину D2 сжатия, учитывая новое начальное положение P2 накладки 13 для грудной клетки. Импульс сжатия для приведения в движение подвижного рычага 11 до второй глубины D2 сжатия вычисляется и начинается следующий цикл сжатия (момент T3 на фиг.3).
Следует понимать, что начальная точка каждого сжатия определяется объемом восстановления грудной клетки, как показано на фиг.4. На фиг.4 показано первое начальное положение P0 для первого цикла сжатия и текущее нулевое значение Pc в течение различных циклов сжатия. На фиг.4 показаны семь циклов.
Каждое сжатие начинается в месте окончания каждого предыдущего сжатия или, другими словами, положение накладки 13 для грудной клетки в начале нового сжатия является новым текущим нулевым положением Pc. Глубина сжатия вычисляется, исходя из нового текущего нулевого положения Pc.
Предпочтительно, учитывается эффект формования грудной клетки. Конечно, точка восстановления грудной клетки в ходе реанимации может смещаться на несколько сантиметров. Вычисление глубины сжатия относительно нулевого текущего положения накладки 13 для грудной клетки гарантирует, что эффективная глубина сжатия не уменьшается на величину глубины, на которую формуется грудная клетка. Эффективная глубина сжатия остается в требуемом диапазоне эффективной CPR.
Дополнительно, поскольку текущее нулевое положение Pc соответствует точке восстановления грудной клетки, избегаются травмы, возникающие, когда накладка для грудной клетки начинает цикл на высоте, которая на несколько сантиметров выше грудной клетки и контактирует с грудной клеткой с относительной высокой скоростью.
Как показано на фиг.4, вентиляция V выполняется после первого цикла сжатия, показанного на фиг.4. Накладка 13 для грудной клетки может строго следовать за перемещением грудной клетки во время вентиляции. Это достигается посредством управления силой, которое не блокирует перемещение грудной клетки, тогда как на предшествующем уровне техники системы просто блокируют накладку для грудной клетки в фиксированном положении после того, как имело место сжатие.
В одном аспекте раскрытия отклонение глубины ограничивается, чтобы вред для пациента был минимизирован. Действительно, когда текущее нулевое положение Pc изменяется слишком сильно относительно начального нулевого положения P0, расстояние между грудиной и позвоночным столбом пациента становится все меньше и меньше. В этом случае эффективная глубина (D1, D2, …, Dc) сжатия будет уменьшаться на значение дополнительного отклонения глубины, так чтобы контакт с грудной клеткой никогда не терялся. Предпочтительно отклонение глубины ограничивается диапазоном 1-3 см.
Специалист в данной области техники также должен признать, что настоящее раскрытие позволяет в течение цикла сжатия анализировать положение накладки для грудной клетки, когда разрешено управление силой. Анализ положения накладки для грудной клетки может содержать анализ абсолютного положения накладки 13 для грудной клетки. Анализ положения накладки для грудной клетки может также содержать анализ относительного положения накладки 13 для грудной клетки по отношению к предыдущему циклу сжатия.
Предпочтительно, анализ положения накладки для грудной клетки, когда разрешено управление силой, может предоставлять информацию об эффектах вентиляции и формования. В частности, если накладка 13 для грудной клетки перемещается больше чем на определенное значение за одно-единственное сжатие, этот эффект не может происходить за счет формования грудной клетки, которое является медленным процессом, а должен быть вызван вентиляцией.
В соответствии с настоящим раскрытием, управление силой вставляется между управлением положением во время сжатий. Предпочтительно, управление силой и управление положением разрешаются и запрещаются в фиксированные моменты времени во время циклов сжатия. Это позволяет накладке оставаться в контакте с грудной клеткой в любое время во время циклов сжатия, позволяя, в то же время, полное перемещение грудной клетки во время вентиляции, если вентиляция выполняется.
Другие вариации раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, изучая чертежи, раскрытие и прилагаемую формулу изобретения. В формуле изобретения, слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множественное число. Единый блок может выполнять функции нескольких элементов, приведенных в пунктах формулы изобретения, и наоборот. Простой факт, что определенные меры используются во взаимно различных зависимых пунктах, не указывает, что комбинация этих мер не может использоваться для достижения преимущества. Любые условные обозначения, приведенные в формуле изобретения, не должны рассматриваться как ограничение объема изобретения.
Хотя выше были описаны различные варианты осуществления настоящего изобретения, следует понимать, что они были представлены для примера, но не для ограничения. Специалистам в данной области техники должно быть очевидно, что в них могут быть осуществлены различные изменения в форме и деталях, не отступая от объема изобретения. В дополнение к использованию аппаратного обеспечения (например, внутри или связанного с центральным процессором ("CPU"), микропроцессором, микроконтроллером, цифровым сигнальным процессором, ядром процессора, системой на чипе ("SOC") или любым другим устройством), варианты осуществления могут также быть осуществлены в программном обеспечении (например, компьютерно считываемый код, программный код и/или команды, представленные в любой форме, такой как источник, объект или машинный язык), расположенном, например, на постоянном используемом компьютером (например, считываемом), носителе, выполненном с возможностью хранения программного обеспечения. Такое программное обеспечение может разрешать, например, функционирование, изготовление, имитацию, моделирование, описание и/или тестирование устройства и способов, описанных здесь. Например, это может осуществляться посредством использования универсальных языков программирования (например, C, C++), языков описания аппаратных средств (HDL), в том числе Verilog HDL, VHDL и так далее, или других доступных программ. Такое программное обеспечение может быть расположено на любом известном постоянном используемом компьютером носителе, таком как полупроводник, магнитный диск или оптический диск (например, CD-ROM, DVD-ROM и т.д.). Программное обеспечение может также быть определено как компьютерный сигнал данных, осуществленный в виде постоянной используемой компьютером (например, считываемой) передающей среды (например, несущая волна или любой другой носитель, в том числе цифровой, оптический, аналоговый носитель). Варианты осуществления настоящего изобретения могут включать в себя способы обеспечения описанного здесь устройства посредством обеспечения программного обеспечения, описывающего устройство, и последующей передачи программного обеспечения в качестве сигнала компьютерных данных по сети связи, содержащей Интернет и интранет.
Следует понимать, что устройство и способ, описанные здесь, могут содержаться в полупроводниковом ядре интеллектуальной собственности, таком как ядро микропроцессора (например, осуществленного в HDL), и преобразовываться в аппаратное обеспечение при производстве интегральных схем. Дополнительно, устройство и способы, описанные здесь, могут быть осуществлены как комбинация аппаратного и программного обеспечения. Таким образом, настоящее изобретение не должно ограничиваться одним из описанных выше примерных вариантов осуществления, а должно определяться только последующей формулой изобретения и ее эквивалентами.
Изобретения относятся к медицине. Способ автоматизированной сердечно-легочной реанимации (СЛР) осуществляют с помощью устройства для автоматизированной СЛР. При этом управляют с помощью элемента управления положением компрессионного элемента во время движения компрессионного элемента из первого начального положения первого цикла сжатия в первое положение сжатия, соответствующее первой глубине сжатия, и обратно в исходное положение компрессионного элемента. Когда исходное положение достигнуто, управляют силой, приложенной к компрессионному элементу, пока не начнется второй цикл сжатия. Управление силой, приложенной к компрессионному элементу, включает в себя наложение силы противодействия на компрессионный элемент после достижения исходного положения и до начала второго цикла сжатия, чтобы гарантировать, что компрессионный элемент остается в контакте или восстанавливает контакт с грудной клеткой после каждого цикла сжатия, позволяя грудной клетке двигаться за счет вентиляции, если такая вентиляция выполняется. Достигается обеспечение контакта компрессионного элемента с грудной клеткой в течение всего времени во время циклов сжатия, обеспечивая при этом полное движение грудной клетки. 4 н. и 10 з.п. ф-лы, 4 ил.
1. Способ автоматизированной сердечно-легочной реанимации (СЛР), причем упомянутый способ содержит этапы, на которых:
- управляют положением компрессионного элемента во время движения компрессионного элемента из первого начального положения первого цикла сжатия в первое положение сжатия, соответствующее первой глубине сжатия, и обратно в исходное положение компрессионного элемента,
- после того, как исходное положение достигнуто, управляют силой, приложенной к компрессионному элементу, пока не начнется второй цикл сжатия, причем управление силой, приложенной к компрессионному элементу, включает в себя наложение силы противодействия на компрессионный элемент после достижения исходного положения и до начала второго цикла сжатия, чтобы гарантировать, что компрессионный элемент остается в контакте или восстанавливает контакт с грудной клеткой после каждого цикла сжатия, позволяя грудной клетке двигаться за счет вентиляции, если такая вентиляция выполняется.
2. Способ по п. 1, в котором компрессионный элемент приводится в действие двигателем и в котором управление силой, приложенной к компрессионному элементу, содержит ограничение мощности двигателя.
3. Способ по п. 2, содержащий приложение к двигателю ограниченного тока.
4. Способ по п. 3, дополнительно содержащий вычисление второй глубины сжатия для второго цикла сжатия, в котором конечное положение первого цикла сжатия является вторым начальным положением компрессионного элемента для второго цикла сжатия.
5. Способ по п. 4, дополнительно содержащий ограничение разности между первой глубиной сжатия и второй глубиной сжатия до максимального отклонения глубины.
6. Способ по п. 5, в котором максимальное отклонение глубины находится в диапазоне 1-3 см.
7. Способ по п. 1, в котором управление положением и/или управление силой разрешается в фиксированные разрешающие моменты времени.
8. Способ по п. 1, в котором управление положением и/или управление силой запрещается в фиксированные запрещающие моменты времени.
9. Способ по п. 1, содержащий переходный период между управлением положением компрессионного элемента и управлением силой, приложенной к компрессионному элементу.
10. Способ по п. 1, в котором управление силой выполняется в течение временного окна, расположенного между приблизительно 0,2 и приблизительно 0,6 с.
11. Способ по п. 1, содержащий анализ положения компрессионного элемента во время управления силой, приложенной к компрессионному элементу.
12. Компьютерно-читаемый носитель, содержащий код для предписывания приемопередатчику выполнять способ автоматизированной сердечно-легочной реанимации (СЛР) согласно любому из пп. 1-11.
13. Устройство для автоматизированной сердечно-легочной реанимации (СЛР), причем упомянутое устройство содержит компьютерно-читаемый носитель, содержащий код для предписывания приемопередатчику выполнять способ автоматизированной СЛР согласно любому из пп. 1-11.
14. Устройство для автоматизированной сердечно-легочной реанимации (СЛР), причем упомянутое устройство содержит:
- элемент СЛР, содержащий компрессионный элемент, выполненный с возможностью приложения компрессионной силы к грудной клетке пациента,
- элемент управления, выполненный с возможностью управления положением компрессионного элемента во время перемещения компрессионного элемента из первого начального положения первого цикла сжатия в первое положение сжатия, соответствующее первой глубине сжатия, и обратно в исходное положение компрессионного элемента, и управления силой, приложенной к компрессионному элементу, после того, как достигнуто исходное положение, и до начала второго цикла сжатия, причем элемент управления выполнен с возможностью накладывать силу противодействия на компрессионный элемент после достижения исходного положения и до начала второго цикла сжатия, чтобы гарантировать, что компрессионный элемент остается в контакте или восстанавливает контакт с грудной клеткой после каждого цикла сжатия, позволяя грудной клетке двигаться за счет вентиляции, если такая вентиляция выполняется.
| EP 1854444 A1, 14.11.2007 | |||
| WO 2009077967 A1, 25.06.2009 | |||
| СПОСОБ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336859C2 |
| US 2002026131 A1, 28.02.2002 | |||
| WO 2009156924 A1, 30.12.2009. | |||

