Изобретение относится к приводам с возвратно-поступательно движущимися ножными рычагами и может быть использовано в велосипедах, веломобилях, катамаранах, других технических системах с педальным приводом.
Известен привод для велосипедов и веломобилей, содержащий ведущий вал с кривошипами и педалями, ведомый вал с обгонной муфтой в ведущем колесе и тросы. К правому кривошипу прикреплен или на ведущем валу установлен двуплечий рычаг, на концах которого выполнены криволинейные поверхности, через которые перекинуты тросы, закрепленные на концах двуплечего рычага. При этом средние части тросов намотаны и закреплены на двух шкивах, установленных на ведущем колесе с возможностью взаимодействия с ним через обгонные муфты. В средней части двуплечего рычага имеется рычаг с эластичной тягой, например пружиной, второй конец которой зацеплен за раму. Техническое решение направлено на аккумулирование энергии толчка ногой в конце поворота кривошипа (Патент на изобретение RU №2294859, опубл. 10.03.2007 г.).
Наиболее близким техническим решением является привод велосипеда, который содержит педальную ось, на которой установлены обгонные муфты и ведущая звездочка, на корпусах обгонных муфт закреплены кривошипы с педалями, причем кривошипы дополнительно соединены между собой непрерывным гибким органом через двуплечный рычаг, расположенный на раме велосипеда. Техническое решение направлено на устранение «мертвых точек» при движении на велосипеде (патент CN №2363950, опубл. 16.02.2000 г.) - прототип.
Недостатком данной конструкции является применение двуплечного качающегося рычага и гибкого рабочего органа, который расположен под сиденьем. Это снижает удобство эксплуатации велосипеда т.к. может привести к травме велосипедиста. Кроме того, данный привод не обеспечивает возможность регулировки усилия на педалях.
Технической задачей изобретения является обеспечение возможности регулировки мускульного усилия на педалях при одновременном повышении надежности педального привода, а также безопасности и удобства эксплуатации педального транспортного средства.
Техническая задача достигается тем, что привод педальных транспортных средств содержит педальную ось, на которой установлены механизмы односторонней передачи движения и ведущая звездочка, выполненная с возможностью взаимодействия с ведомой звездочкой посредством основного гибкого рабочего органа, выполненного непрерывным, на корпусах механизмов односторонней передачи движения закреплены кривошипы с педалями, кривошипы взаимодействуют между собой посредством дополнительного гибкого органа, при этом заявляемый привод дополнительно содержит реверсивно-синхронизирующий вал с передаточными звеньями, кривошипы взаимодействуют между собой через участки дополнительного гибкого органа, которые с одной стороны жестко соединены с передаточными звеньями реверсивно-синхронизирующего вала, а с другой стороны жестко соединены с корпусами соответствующих механизмов односторонней передачи движения, причем дополнительный гибкий орган выполнен с возможностью взаимодействия, по меньшей мере, с одним регулировочным роликом, выполненным с возможностью перемещения, привод дополнительно снабжен приспособлением против прокрутки кривошипов в обратную сторону, которое выполнено в виде установленных на кривошипах ограничителей стопорного типа или в виде дополнительной обгонной муфты, установленной на педальной оси, корпус которой заблокирован.
Кривошипы могут быть дополнительно подпружинены, например, снабжены пружинами кручения.
Сравнение заявляемого технического решения с прототипом показывает, что оно отличается следующими признаками:
- дополнительно содержит реверсивно-синхронизирующий вал с передаточными звеньями;
- с одной стороны участки дополнительного гибкого органа соединяют между собой кривошипы через передаточные звенья реверсивно-синхронизирующего вала посредством жесткого соединения с ними;
- с другой стороны участки дополнительного гибкого органа жестко соединены с корпусами механизмов односторонней передачи движения;
- дополнительный гибкий орган имеет возможность взаимодействовать, по меньшей мере, с одним регулировочным роликом, выполненным с возможностью перемещения;
- привод дополнительно снабжен приспособлением против прокрутки кривошипов в обратную сторону, которое выполнено в виде установленных на кривошипах ограничителей стопорного типа или в виде дополнительной обгонной муфты, установленной на педальной оси, корпус которой заблокирован.
Поэтому есть основания полагать считать, что заявляемое изобретение соответствует критерию «новизна».
Под непрерывным гибким рабочим органом понимается замкнутая цепь.
В качестве участков дополнительного гибкого органа может быть использована лента, или цепь, или трос, или иной аналогичный элемент.
В качестве передаточных звеньев могут использоваться звездочки, или шкивы, или иные аналогичные элементы, передающие движение.
Жесткое соединение участков гибкого органа с передаточными звеньями выполнено, например, сваркой, замковым соединением, клепкой и иными аналогичными способами.
В качестве механизмов односторонней передачи движения могут использоваться обгонные муфты, например храповые муфты.
Регулировочные ролики достаточно широко известны. В данном техническом решении понимаются регулировочные ролики, которые за счет возможности их перемещения, позволяют изменить разбег между кривошипами, что дает возможность регулировать усилие на педалях, поэтому привод позволяет велосипедисту преодолевать значительные уклоны. Также следует отметить, что пружины кручения, дополнительно установленные на кривошипах, оказывают усилие, направленное вниз, что не позволяет кривошипам «разбежаться», т.е. обеспечивает дополнительную надежность заявляемому педальному приводу. Приспособления против прокрутки кривошипов в обратную сторону обеспечивают работоспособность педального привода.
При проведении патентно-информационных исследований не выявлено технических решений, которые использовали бы аналогичный принцип исключения эффекта «мертвых точек» транспортных средств с возвратно-поступательными движущимися ножными рычагами, позволяющих повысить надежность и удобство использования велосипеда или веломобиля или иного аналогичного транспортного средства. Поэтому можно сделать вывод о том, что заявляемое изобретение соответствует критерию «изобретательский уровень».
Заявляемая конструкция может быть изготовлена из известных в технике элементов и материалов с использованием известных способов их сборки, т.е. заявляемое изобретение соответствуют критерию «промышленная применимость».
Заявляемое устройство иллюстрируется следующими примерами конкретного выполнения.
На Фиг.1 показан заявляемый привод по примеру 1, где в качестве участков дополнительного гибкого органа используется цепь.
На Фиг.2 показан заявляемый привод по примеру 2, где в качестве участков дополнительного гибкого органа используется лента.
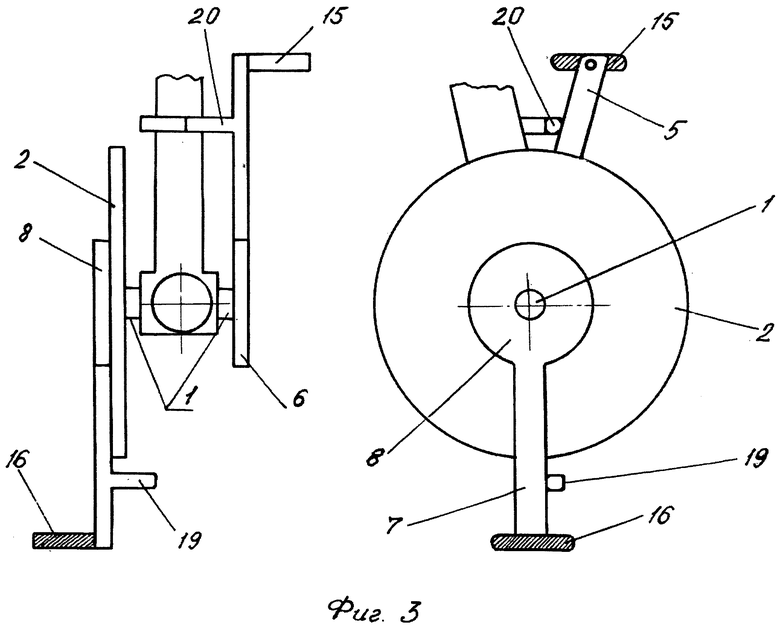
На Фиг.3 показаны кривошипы с ограничителями.
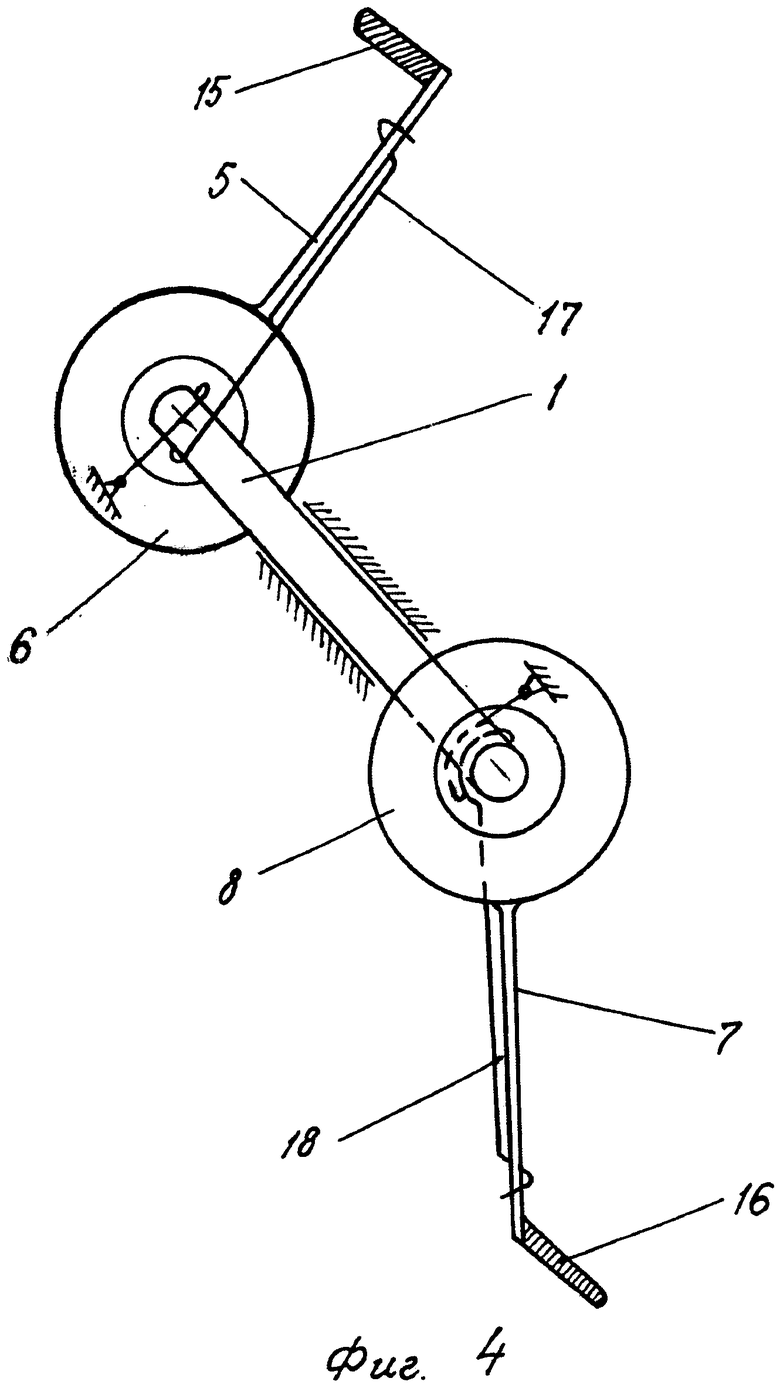
На Фиг.4 показаны кривошипы с пружинами кручения.
Заявляемый привод по примеру 1 (Фиг.1) состоит из педальной оси 1, на которую жестко насажена ведущая звездочка 2, соединенная посредством непрерывного гибкого рабочего органа 3 с ведомой звездочкой 4, а также кривошип 5 левой педали, через механизм односторонней передачи движения 6, выполненный, в виде обгонной муфты, например, храповой муфты, и кривошип 7 правой педали с аналогичным механизмом односторонней передачи движения 8, выполненный, в виде обгонной муфты, например, храповой муфты. Педали 15 и 16 соединяются с промежуточным реверсивно-синхронизирующим валом 9, который снабжен передаточными звеньями, выполненными в виде звездочек 10 и 11, жестко установленных на реверсивно-синхронизирующем валу 9. Через участки 12 и 13 дополнительного гибкого органа передачи движения, в качестве которого используют цепь, педали 15 и 16 могут совершать возвратно-поступательное движение взаимообратно, т.е. если одна педаль 15 идет вниз, то другая педаль 16 идет вверх и наоборот. Участок 13 дополнительного гибкого органа проходит через регулировочный ролик 14, который имеет возможность перемещения (на рисунке возможность перемещения обозначена стрелками). Каждый из участков 12 и 13 гибкого рабочего органа может быть снабжен собственным регулировочным роликом, (на рисунке не показаны), которые устанавливаются симметрично, что придает дополнительные возможности регулировки и дополнительную надежность заявляемому педальному приводу. Привод дополнительно снабжен приспособлением против прокрутки кривошипов в обратную сторону - ограничителей или дополнительно установленной обгонной муфты, а именно каждый из кривошипов может быть снабжен ограничителями 19 и 20 (показаны на Фиг.3), или на педальной оси 1 может быть дополнительно установлена обгонная муфта 25, корпус 26 которой заблокирован (показаны на Фиг.1). Кривошипы 5 и 7 могут быть снабжены ответствующими пружинами кручения 17 и 18 (показаны на Фиг.4).
Заявляемый привод по примеру 2 (Фиг.2) выполнен аналогично приводу по примеру 1 и состоит из педальной оси 1, на которую жестко насажена ведущая звездочка 2, соединенная посредством непрерывного гибкого рабочего органа с ведомой звездочкой (на Фиг.2 не показаны), а также кривошип 5 левой педали, через механизм односторонней передачи движения 6, который выполнен в виде обгонной муфты, например, храповой муфты, и кривошип 7 правой педали с аналогичным механизмом односторонней передачи движения 8, выполненный в виде обгонной муфты, например, храповой муфты. Педали 15 и 16 соединяются с промежуточным реверсивно-синхронизирующим валом 9, который снабжен передаточными звеньями, выполненными в виде шкивов 23 и 24, жестко установленными на реверсивно-синхронизирующем валу 9. Через участки 21 и 22 дополнительного гибкого органа передачи движения, в качестве которого используют ленту, педали 15 и 16 могут совершать возвратно-поступательное движение взаимообратно, т.е. если одна педаль 15 идет вниз, то другая педаль 16 идет вверх и наоборот. Участок 22 дополнительного гибкого органа проходит через регулировочный ролик 14, который имеет возможность перемещения (на рисунке возможность перемещения обозначена стрелками). Каждый из участков 21 и 22 гибкого рабочего органа может быть снабжен собственным регулировочным роликом, (на рисунке не показаны), которые устанавливаются симметрично, что придает дополнительные возможности регулировки и дополнительную надежность заявляемому педальному приводу. Каждый из кривошипов может быть снабжен ограничителями 19 и 20 (показаны на Фиг.3), или на педальной оси 1 может быть дополнительно установлена обгонная муфта 25, корпус 26 которой заблокирован (не показана на Фиг.2). Кривошипы 5 и 7 могут быть снабжены ответствующими пружинами кручения 17 и 18 (показаны на Фиг.4).
Заявляемый привод работает следующим образом. Усилие ноги велосипедиста передается на кривошипы 5 и 7 через педали 15 и 16. При этом кривошипы 5 и 7 совершают возвратно-поступательное взаимообратное движение, не совершая полный круг, и, соответственно, не достигают «мертвых точек». Это происходит за счет встроенных в педали 15 и 16 механизмов одностороннего передачи движения 6 и 8, которые поочередно сообщают педальной оси 1 вращение только в одном направлении, что приводит во вращение ведущую звездочку 2. При этом участки гибкого рабочего органа 12 и 13 (по примеру 1) или 21 и 22 (по примеру 2) за счет жесткого соединения со звездочками 10 и 11 (по примеру 1) реверсивно-синхронизирующего вала 9 или со шкивами 23 и 24 (по примеру 2) реверсивно-синхронизирующего вала 9 с одной стороны, и корпусами механизмов односторонней передачи движения (обгонных муфт, например, храповых муфт) 6 и 8 с другой стороны, обеспечивают взаимообратное движение кривошипов 5 и 7 левой и правой педалей 15 и 16. Регулировочный ролик 14 необходим для регулировки степени взаимного разбега кривошипов 5 и 7 между собой и выбора наиболее комфортного угла разбега педалей 15 и 16. Опускание ролика 14 вниз приводит к увеличению угла разбега кривошипов 5 и 7 относительно горизонтальной плоскости, что наиболее комфортно сказывается при небольших нагрузках, т.е. при движении по ровной местности. Поднятие ролика 14 приводит к уменьшению разбега между кривошипами, концентрируя их около плоскости максимального приложения силы, т.е. по касательной к окружности вращения ведущей звездочки 2. В этом положении можно достаточно легко преодолевать подъемы, которые на обычном велосипеде труднопреодолимы. Для улучшения удобства эксплуатации, кривошипы 5 и 7 снабжены пружинами кручения 17 и 18 (Фиг.4). Особенность крепления пружин кручения 17 и 18 позволяет создавать небольшое усилие на кривошипах 5 и 7, которое постоянно направлено вниз, поэтому отрезки рабочих органов 12 и 13 (по примеру 1) или 21 и 22 (по примеру 2) находятся в постоянном натянутом положении, что не дает возможность «разбежаться» кривошипам 5 и 7. Ограничители 19 и 20, установленные на кривошипах 5 и 7 (Фиг.3) обеспечивают защиту от прокручивания педалей 15 и 16 при движении транспортного средства назад. Такую же функцию может выполнять обгонная муфта 25 (Фиг.1). В случае, если ограничители 19 и 20 или обгонная муфта 25 будут отсутствовать в заявляемой конструкции педального привода, то это может привести к тому, что участки гибких рабочих органов 12 и 13 (по примеру 1) или 21 и 22 (по примеру 2) могут сойти с передаточных звеньев, т.е. со звездочек 10 и 11 или со шкивов 23 и 24.
Использование заявляемой конструкции педального привода позволяет уменьшить мускульное усилие при движении транспортного средства, исключая «мертвые точки» при его движении по наклонной поверхности, надежно и удобно в эксплуатации, т.к. приобретает возможность регулировки мускульного усилия на педалях в зависимости от угла наклона поверхностей движения, не требует существенных финансовых вложений на переоборудование уже эксплуатируемых транспортных средств или на изготовление новых транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2084367C1 |
| Трансмиссия моторизованного велосипеда (варианты) | 2017 |
|
RU2666622C1 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |
| ПРИВОД ДЛЯ ВЕЛОСИПЕДОВ И ВЕЛОМОБИЛЕЙ | 2005 |
|
RU2294859C1 |
| ВЕЛОСИПЕД | 1992 |
|
RU2068365C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| Кареточный узел педального привода | 1985 |
|
SU1320118A1 |

Изобретение относится к приводам с возвратно-поступательно движущимися ножными рычагами и может быть использовано в велосипедах, веломобилях, катамаранах, других технических системах с педальным приводом. Привод содержит педальную ось (1), на которой установлены механизмы односторонней передачи движения и ведущая звездочка (2), взаимодействующая с ведомой звездочкой (4) через непрерывный гибкий рабочий орган (3), выполненный в виде цепи. На корпусах механизмов односторонней передачи движения закреплены кривошипы (5) и (7) с педалями (15) и (16). Привод также содержит реверсивно-синхронизирующий вал (9) с передаточными звеньями, в качестве которых могут использоваться звездочки или шкивы. Кривошипы взаимодействуют между собой через участки (12) и (13) дополнительного гибкого органа, который взаимодействует с, по меньшей мере, одним регулировочным роликом (14). Приспособление против прокрутки кривошипов в обратную сторону выполнено в виде установленных на кривошипах (5) и (7) ограничителей (19) и (20) стопорного вида или в виде обгонной муфты (25). Технический результат - уменьшение мускульного усилия на педали, исключение «мертвых точек», повышение надежности и удобства эксплуатации. 6 з.п. ф-лы, 4 ил.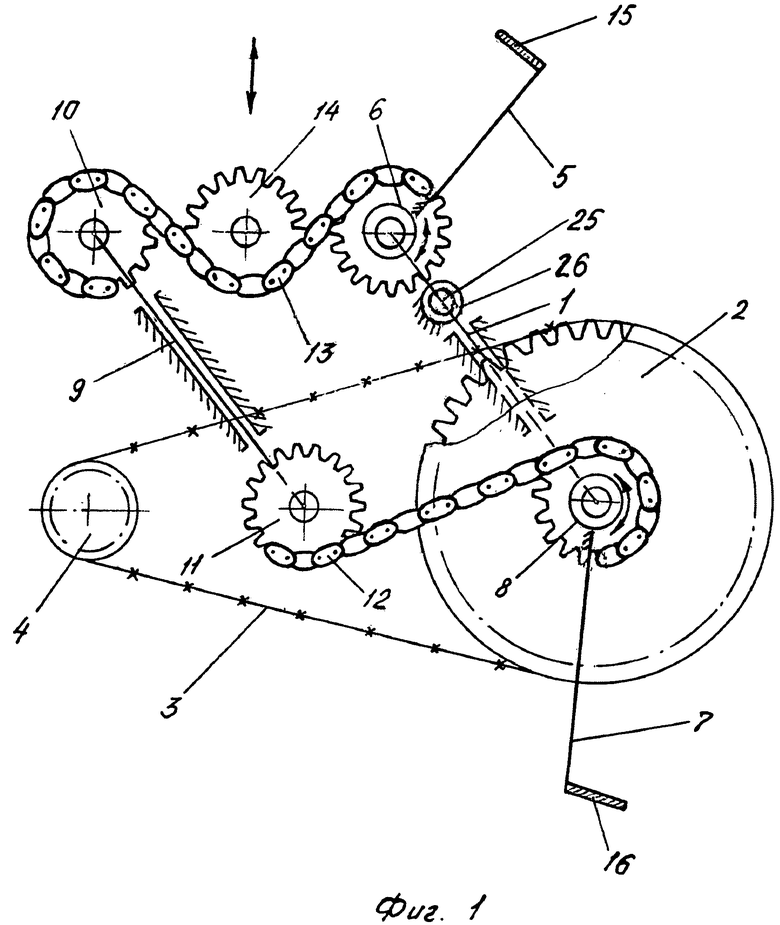
1. Привод педальных транспортных средств, содержащий педальную ось, на которой установлены механизмы односторонней передачи движения и ведущая звездочка, выполненная с возможностью взаимодействия с ведомой звездочкой посредством основного гибкого рабочего органа, выполненного непрерывным, на корпусах механизмов односторонней передачи движения закреплены кривошипы с педалями, кривошипы взаимодействуют между собой посредством дополнительного гибкого органа, отличающийся тем, что дополнительно установлен реверсивно-синхронизирующий вал с передаточными звеньями, кривошипы взаимодействуют между собой через участки дополнительного гибкого органа, которые с одной стороны жестко соединены с передаточными звеньями реверсивно-синхронизирующего вала, а с другой стороны жестко соединены с корпусами соответствующих механизмов передачи движения, причем дополнительный гибкий орган выполнен с возможностью взаимодействия, по меньшей мере, с одним регулировочным роликом, выполненным с возможностью перемещения, привод дополнительно снабжен приспособлением против прокрутки кривошипов в обратную сторону, которое выполнено в виде установленных на кривошипах ограничителей стопорного типа или в виде дополнительной обгонной муфты, установленной на педальной оси, корпус которой заблокирован.
2. Привод педальных транспортных средств по п.1, отличающийся тем, что кривошипы дополнительно подпружинены.
3. Привод педальных транспортных средств по п.1, отличающийся тем, что в качестве механизма односторонней передачи движения установлены обгонные муфты.
4. Привод педальных транспортных средств по п.1, отличающийся тем, что в качестве участка дополнительного гибкого органа используют цепь.
5. Привод педальных транспортных средств по п.4, отличающийся тем, что в качестве передаточных звеньев используют звездочки.
6. Привод педальных транспортных средств по п.1, отличающийся тем, что в качестве участка дополнительного гибкого органа используют ленту.
7. Привод педальных транспортных средств по п.6, отличающийся тем, что в качестве передаточных звеньев используют шкивы.
| US 5088340 A, 18.02.1992 | |||
| Устройство для защитного отключения в сети с повторными заземлениями нейтрали | 1988 |
|
SU1688344A1 |
| DE 102004039496 A1, 23.02.2006 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Мускульный привод транспортного средства | 1987 |
|
SU1477619A1 |
| Узел гидротехнических сооружений | 1934 |
|
SU41450A1 |
| Железнодорожный шлагбаум | 1950 |
|
SU90760A1 |
| WO 2011136502 A2, 03.11.2011 | |||

