Область техники
Настоящее изобретение относится к автоматической трансмиссии и, в частности, к автоматической трансмиссии, комбинируемой с двигателем, который выполняет автоматическое глушение и запуск при работе на холостом ходу.
Уровень техники
Технология для повышения экономии топлива и рабочих характеристик выхлопа посредством автоматической остановки (автоматического глушения и запуска двигателя при работе на холостом ходу) двигателя в момент, когда транспортное средство остановлено, введена в практическое использование.
Поскольку механический масляный насос не может приводиться в действие посредством мощности двигателя в момент, когда двигатель автоматически остановлен в транспортном средстве, приспосабливающем эту технологию, гидравлическое давление, необходимое при трогании с места, не может подаваться из механического масляного насоса в пусковой элемент фрикционного зацепления автоматической трансмиссии (тормоз, муфта, которые должны зацепляться при трогании с места) и пусковой элемент фрикционного зацепления устанавливается в незацепленное состояние. В этом случае, даже если при попытке начинать движение транспортного средства в ответ на запрос на трогание с места, зацепление пускового элемента фрикционного зацепления задерживается, вследствие чего транспортное средство не может быстро трогаться с места.
Таким образом, в JP2002-106380A электрический масляный насос, который приводится в действие посредством электроэнергии, подаваемой из аккумулятора, предоставляется отдельно, чтобы подавать гидравлическое давление, сформированное посредством электрического масляного насоса, в пусковой элемент фрикционного зацепления в момент, когда двигатель автоматически остановлен.
Сущность изобретения
Если гидравлическое давление, подаваемое в пусковой элемент фрикционного зацепления во время автоматического глушения и запуска двигателя при работе на холостом ходу, управляется заранее так, что оно является гидравлическим давлением, при котором пусковой элемент фрикционного зацепления начинает формирование передаваемой мощности (запаса по крутящему моменту), передаваемая мощность пускового элемента фрикционного зацепления может быть увеличена без задержки и транспортное средство может быстро трогаться с места в случае запроса на трогание с места.
Тем не менее возникают случаи, когда двигатель немного вращается в обратном направлении сразу после того, как его вращение (прямое вращение) прекращается вследствие силы сжатого воздуха в камере сгорания, которая задвигает поршни обратно, и веса поршней. В таких случаях, гидравлическое давление, подаваемое в пусковой элемент фрикционного зацепления, всасывается посредством механического масляного насоса, который вращается в обратном направлении вместе с двигателем, и подача гидравлического давления в пусковой элемент фрикционного зацепления временно падает. Если запрос на трогание с места выполняется в это время, требуется большее время до тех пор, пока передаваемая мощность пускового элемента фрикционного зацепления не увеличится, посредством чего пусковые рабочие характеристики транспортного средства снижаются.
Настоящее изобретение нацелено на то, чтобы получать хорошие пусковые рабочие характеристики, даже если запрос на трогание с места выполняется во время, когда гидравлическое давление, подаваемое в пусковой элемент фрикционного зацепления, падает за счет уменьшения падения гидравлического давления, подаваемого в пусковой элемент фрикционного зацепления, вызываемого посредством обратного вращения двигателя, возникающего сразу после того, как двигатель прекращает вращение.
Один аспект настоящего изобретения направлен на автоматическую трансмиссию, которая должна комбинироваться с двигателем, который выполняет автоматическое глушение и запуск при работе на холостом ходу, содержащую механический масляный насос, который приводится в действие посредством мощности двигателя; электрический масляный насос; пусковой элемент фрикционного зацепления, в который подается гидравлическое давление, созданное в механическом масляном насосе или электрическом масляном насосе; и модуль гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, который управляет электрическим масляным насосом в установившемся режиме, в котором рабочая нагрузка электрического масляного насоса задается равной установившейся нагрузке, во время автоматического глушения и запуска двигателя при работе на холостом ходу, но управляет электрическим масляным насосом в высоконапорном режиме, в котором рабочая нагрузка электрического масляного насоса задается равной нагрузке, превышающей установившуюся нагрузку, по меньшей мере, в то время как гидравлическое давление, подаваемое в пусковой элемент фрикционного зацепления, падает вследствие обратного вращения двигателя, возникающего сразу после того, как двигатель прекращает вращение.
Другой аспект настоящего изобретения направлен на способ гидравлического управления для автоматической трансмиссии, которая должна комбинироваться с двигателем, который выполняет автоматическое глушение и запуск при работе на холостом ходу, включающей в себя механический масляный насос, который приводится в действие посредством мощности двигателя, электрический масляный насос и пусковой элемент фрикционного зацепления, в который передается гидравлическое давление, сформированное в механическом масляном насосе или электрическом масляном насосе, при этом электрический масляный насос работает в установившемся режиме, в котором рабочая нагрузка электрического масляного насоса задается равной установившейся нагрузке, во время автоматического глушения и запуска двигателя при работе на холостом ходу, но работает в высоконапорном режиме, в котором рабочая нагрузка электрического масляного насоса задается равной нагрузке, превышающей установившуюся нагрузку, в течение предварительно определенного периода, когда двигатель прекращает вращение.
Согласно этим аспектам падение гидравлического давления, подаваемого в пусковой элемент фрикционного зацепления, вызываемое посредством обратного вращения двигателя, может быть уменьшено. Таким образом, передаваемая мощность пускового элемента фрикционного зацепления может быть увеличена и хорошие пусковые рабочие характеристики могут быть получены посредством быстрого увеличения гидравлического давления, подаваемого в пусковой элемент фрикционного зацепления, даже если запрос на трогание с места выполняется во время, когда гидравлическое давление, подаваемое в пусковой элемент фрикционного зацепления, падает.
Вариант осуществления настоящего изобретения и его преимущества подробно описаны далее со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Фиг.1 является схемой принципиальной конфигурации транспортного средства, оснащенного автоматической трансмиссией согласно варианту осуществления настоящего изобретения;
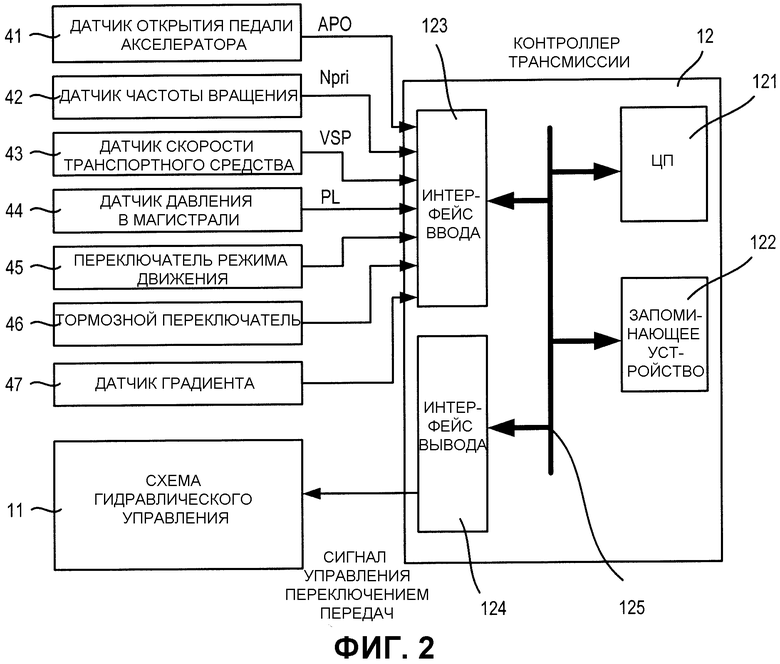
Фиг.2 является схемой, показывающей внутреннюю конфигурацию контроллера трансмиссии;
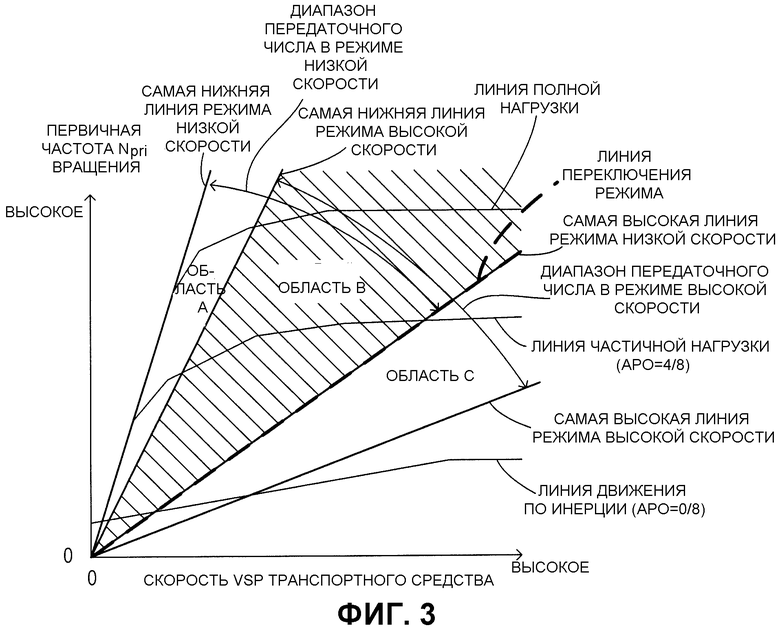
Фиг.3 является графиком, показывающим пример карты переключения передач;
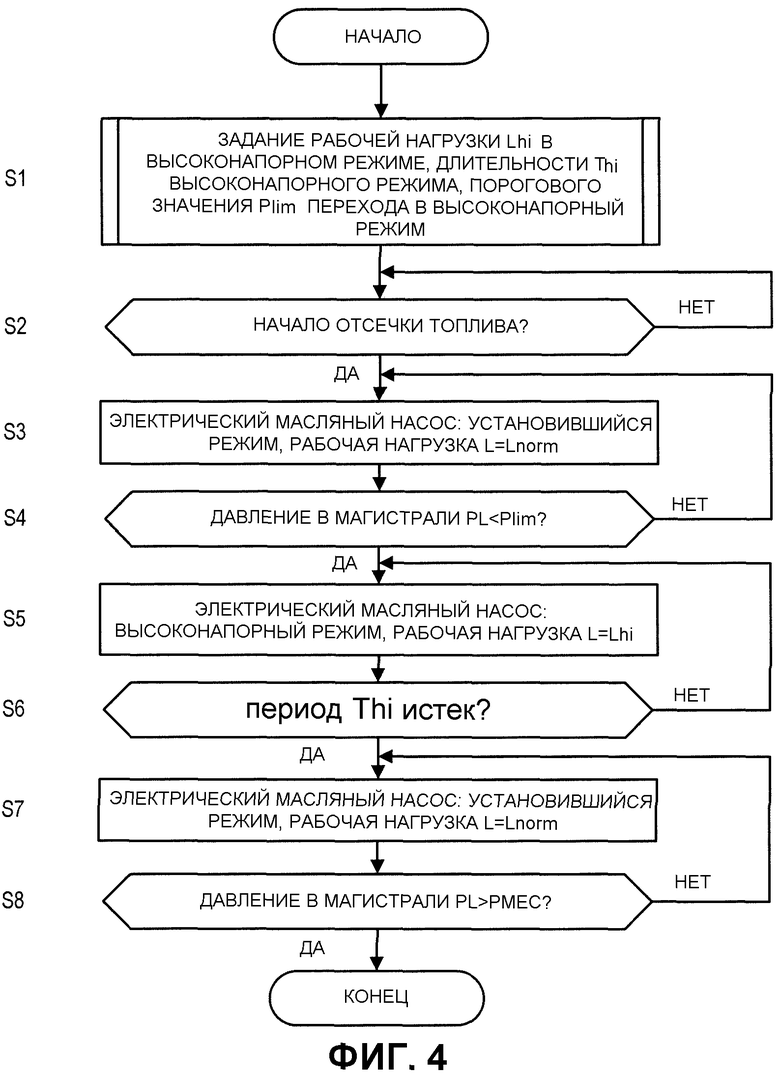
Фиг.4 является блок-схемой последовательности операций способа, показывающей содержимое гидравлического управления, ассоциированного с автоматическим глушением и запуском двигателя при работе на холостом ходу, выполняемого посредством контроллера трансмиссии;
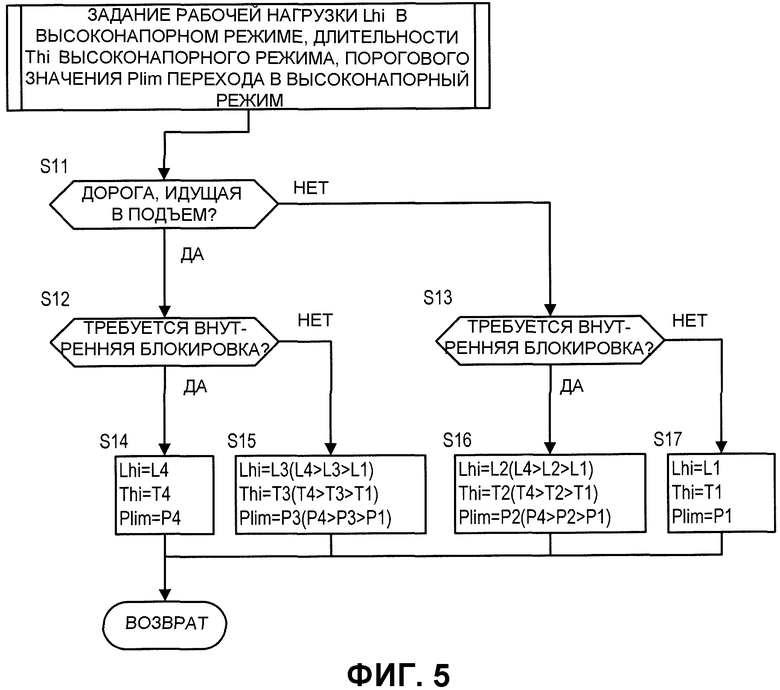
Фиг.5 является блок-схемой последовательности операций способа, показывающей содержимое гидравлического управления, ассоциированного с автоматическим глушением и запуском двигателя при работе на холостом ходу, выполняемого посредством контроллера трансмиссии;
Фиг.6 является временной диаграммой, показывающей функции и преимущества настоящего изобретения; и
Фиг.7 является временной диаграммой, показывающей функции и преимущества настоящего изобретения.
Подробное описание вариантов осуществления изобретения
В последующем описании "передаточное число" определенного трансмиссионного механизма является значением, полученным посредством деления входной частоты вращения этого трансмиссионного механизма на его выходную частоту вращения. Дополнительно, "наименьшее передаточное число" означает максимальное передаточное число этого трансмиссионного механизма, а "наибольшее передаточное число" означает его минимальное передаточное число.
Фиг.1 является схемой принципиальной конфигурации транспортного средства, оснащенного автоматической трансмиссией согласно варианту осуществления настоящего варианта осуществления. Это транспортное средство включает в себя двигатель 1 в качестве источника приведения в движение. Выходное вращение двигателя 1 передается на ведущие колеса 7 через преобразователь 2 крутящего момента с блокировочной муфтой, первую зубчатую передачу 3, бесступенчатую трансмиссию (в дальнейшем в этом документе называемую просто "трансмиссией 4"), вторую зубчатую передачу 5 и конечный редуктор 6. Вторая зубчатая передача 5 включает в себя механизм 8 парковки для механической блокировки выходного вала трансмиссии 4 в припаркованном состоянии с тем, чтобы не позволять вращение.
Двигатель 1 является двигателем с функцией автоматического глушения и запуска при работе на холостом ходу, который автоматически прекращает подачу топлива и останавливается, когда предварительно определенное условие автоматического глушения и запуска двигателя при работе на холостом ходу удовлетворяется, когда транспортное средство остановлено. Условие автоматического глушения и запуска двигателя при работе на холостом ходу удовлетворяется, например, когда транспортное средство остановлено с тормозом во включенном состоянии, прогрев двигателя 1 и трансмиссии 4 завершены и оставшийся заряд аккумулятора 13 достаточный.
Трансмиссия 4 включает в себя механический масляный насос 10m, в который вводится вращение двигателя 1 и который приводится в действие с использованием части мощности двигателя 1, и электрический масляный насос 10e, который приводится в действие посредством подачи питания из аккумулятора 13. Электрический масляный насос 10e включает в себя корпус масляного насоса, электромотор и приводной механизм электромотора для приведения в действие и вращения корпуса масляного насоса и может управлять рабочей нагрузкой так, что она является произвольной нагрузкой, или на нескольких стадиях в ответ на сигнал приведения в действие, передаваемый из контроллера 12 трансмиссии, который будет описываться ниже. В частности, рабочая нагрузка (рабочий режим) электрического масляного насоса 10e управляется на основе управляющего тока в электрический масляный насос 10e. Например, переключение из установившегося режима в высоконапорный режим, которое будет описываться ниже, выполняется посредством задания управляющего тока в электрический масляный насос 10e равным управляющему току, превышающему управляющий ток в установившемся режиме. Трансмиссия 4 дополнительно включает в себя схему 11 гидравлического управления для регулирования гидравлического давления (в дальнейшем в этом документе называемого "давлением PL в магистрали") из механического масляного насоса 10m или электрического масляного насоса 10e и подачи регулируемого гидравлического давления в каждый компонент трансмиссии 4 и контроллер 12 трансмиссии для управления схемой 11 гидравлического управления.
Трансмиссия 4 включает в себя механизм клиноременной бесступенчатой трансмиссии (в дальнейшем в этом документе называемый "вариатором 20") и механизм 30 дополнительной трансмиссии, предоставляемый последовательно с вариатором 20. "Предоставляемый последовательно" означает, что вариатор 20 и механизм 30 дополнительной трансмиссии предоставляются последовательно в тракте передачи энергии от двигателя 1 к ведущим колесам 7. Механизм 30 дополнительной трансмиссии может непосредственно соединяться с выходным валом вариатора 20, как в этом примере, или может быть подсоединен через другой трансмиссионный механизм или механизм передачи энергии (например, зубчатую передачу). Альтернативно, механизм 30 дополнительной трансмиссии может соединяться со ступенью (стороной входного вала) перед вариатором 20.
Вариатор 20 включает в себя первичный шкив 21, вторичный шкив 22 и клиновой ремень 23, установленный между шкивами 21 и 22. Каждый из шкивов 21, 22 включает в себя неподвижную коническую пластину, подвижную коническую пластину, размещаемую так, что поверхность направляющего ролика располагается напротив неподвижной конической пластины, и клиновидный паз формируется между неподвижной конической пластиной и подвижной конической пластиной, и гидравлический цилиндр 23a, 23b, размещаемый на задней поверхности этой подвижной конической пластины для смещения подвижной конической пластины в осевом направлении. Когда гидравлические давления, подаваемые в гидравлические цилиндры 23a, 23b, регулируются, ширины клиновидных пазов изменяются так, чтобы изменять контактные радиусы клинового ремня 23 и каждого из шкивов 21, 22, посредством чего передаточное число вариатора 20 непрерывно изменяется.
Механизм 30 дополнительной трансмиссии является трансмиссионным механизмом с двумя скоростями движения вперед и одной скоростью движения назад. Механизм 30 дополнительной трансмиссии включает в себя механизм 31 планетарной передачи Равиньо, в котором водила двух планетарных передач соединяются, и множество элементов фрикционного зацепления (тормоз 32 низшей передачи, муфта 33 высшей передачи, тормоз 34 заднего хода), которые соединяются с множеством вращательных элементов, составляющих механизм 31 планетарной передачи Равиньо, чтобы изменять их состояния вращения. Если гидравлические давления, подаваемые в каждый из элементов 32-34 фрикционного зацепления, регулируются, чтобы изменять зацепленные и расцепленные состояния каждого из элементов 32-34 фрикционного зацепления, положение передачи механизма 30 дополнительной трансмиссии изменяется.
Например, механизм 30 дополнительной трансмиссии устанавливается в положение первой передачи, если тормоз 32 низшей передачи зацеплен, а муфта 33 высшей передачи и тормоз 34 заднего хода расцеплены. Трансмиссионный механизм 30 устанавливается в положение второй передачи, имеющее меньшее передаточное число, чем положение первой передачи, если муфта 33 высшей передачи зацеплена, а тормоз 32 низшей передачи и тормоз 34 заднего хода расцеплены. Дополнительно, механизм 30 дополнительной трансмиссии устанавливается в положение передачи заднего хода, если тормоз 34 заднего хода зацеплен, а тормоз 32 низшей передачи и муфта 33 высшей передачи расцеплены. В последующем описании случай, в котором механизм 30 дополнительной трансмиссии находится в положении первой передачи, выражается посредством того, что "трансмиссия 4 находится в режиме низкой скорости", а случай, в котором механизм 30 дополнительной трансмиссии находится в положении второй передачи, выражается посредством того, что "трансмиссия 4 находится в режиме высокой скорости".
Контроллер 12 трансмиссии включает в себя ЦП 121, запоминающее устройство 122, состоящее из ОЗУ/ПЗУ, интерфейс 123 ввода, интерфейс 124 вывода и шину 125, которая соединяет эти компоненты между собой, как показано на фиг.2.
В интерфейс 123 ввода вводятся выходной сигнал датчика 41 открытия педали акселератора для определения открытия APO педали акселератора, которое является рабочей величиной педали акселератора, выходной сигнал датчика 42 частоты вращения для определения входной частоты вращения трансмиссии 4 (=частоте вращения первичного шкива 21; в дальнейшем в этом документе называемой "первичной частотой Npri вращения"), выходной сигнал датчика 43 скорости транспортного средства для определения скорости VSP транспортного средства, выходной сигнал датчика 44 давления в магистрали для определения давления PL в магистрали, выходной сигнал переключателя 45 режима движения для определения положения рычага выбора, выходные сигналы тормозного переключателя 46 для определения рабочего режима (включение/выключение) педали тормоза и датчика 47 градиента для определения градиента поверхности дороги, на которой транспортное средство движется в данный момент, сигнал (например, сигнал отсечки топлива) из непроиллюстрированного контроллера двигателя и т.п.
Программа управления трансмиссией в трансмиссии 4, карта переключения передач (фиг.3), используемая в этой программе управления трансмиссией, и программа гидравлического управления, ассоциированного с автоматическим глушением и запуском двигателя при работе на холостом ходу, которое будет описываться ниже, сохраняется в запоминающем устройстве 122. ЦП 121 считывает программу управления трансмиссией, сохраненную в запоминающем устройстве 122, и реализует ее, чтобы формировать сигнал управления переключением передач и сигнал приведения в действие для электрического масляного насоса 10e посредством выполнения различных арифметических обработок для различных сигналов, вводимых через интерфейс 123 ввода, и выводит сформированные сигналы в схему 11 гидравлического управления и приводной механизм электромотора электрического масляного насоса 10e через интерфейс 124 вывода. Различные значения, используемые в арифметических обработках посредством ЦП 121, и результаты их вычисления надлежащим образом сохраняются в запоминающем устройстве 122.
Схема 11 гидравлического управления состоит из множества протоков и множества гидравлических регулирующих клапанов. Схема 11 гидравлического управления переключает тракт подачи гидравлического давления, подготавливает необходимое гидравлическое давление из гидравлического давления, сформированного в масляном насосе 10, и подает его в каждый компонент трансмиссии 4 посредством управления множеством гидравлических регулирующих клапанов на основе сигнала управления трансмиссии из контроллера 12 трансмиссии. Таким образом, передаточное число vRatio вариатора 20 и положение передачи механизма 30 дополнительной трансмиссии изменяются, посредством чего трансмиссия 4 переключается.
Фиг.3 показывает пример карты переключения передач, сохраненной в запоминающем устройстве 122. Контроллер 12 трансмиссии управляет вариатором 20 и механизмом 30 дополнительной трансмиссии согласно рабочему состоянию транспортного средства (скорости VSP транспортного средства, первичной частоте Npri вращения, открытию APO педали акселератора в этом варианте осуществления) на основе этой карты переключения передач.
На этой карте переключения передач рабочая точка трансмиссии 4 задается посредством скорости VSP транспортного средства и первичной частоты Npri вращения. Наклон линии, соединяющей рабочую точку трансмиссии 4 и нулевую точку в левом нижнем углу карты переключения передач, соответствует передаточному числу трансмиссии 4 (общему передаточному числу, полученному посредством умножения передаточного числа вариатора 20 на передаточное число механизма 30 дополнительной трансмиссии; в дальнейшем в этом документе называемому "общим передаточным числом"). На этой карте переключения передач линия переключения передач задается для каждого открытия APO педали акселератора аналогично карте переключения передач традиционной клиноременной бесступенчатой трансмиссии, и трансмиссия 4 переключается в соответствии с линией переключения передач, выбранной на основе открытия APO педали акселератора. Для простоты, только линия полной нагрузки (линия переключения передач, когда открытие APO педали акселератора=8/8), линия частичной нагрузки (линия переключения передач, когда открытие APO педали акселератора=4/8) и линия движения по инерции (линия переключения передач, когда открытие APO педали акселератора=0/8) показывается на фиг.3.
В режиме низкой скорости трансмиссия 4 может переключаться между самой нижней линией режима низкой скорости, полученной посредством задания передаточного числа вариатора 20 равным наименьшему передаточному числу, и самой верхней линией режима низкой скорости, полученной посредством задания передаточного числа вариатора 20 равным наибольшему передаточному числу. В этом случае рабочая точка трансмиссии 4 перемещается в областях A и B. С другой стороны, в режиме высокой скорости трансмиссия 4 может переключаться между самой нижней линией режима высокой скорости, полученной посредством задания передаточного числа вариатора 20 равным наименьшему передаточному числу, и самой верхней линией режима высокой скорости, полученной посредством задания передаточного числа вариатора 20 равным наибольшему передаточному числу. В этом случае рабочая точка трансмиссии 4 перемещается в областях B и C.
Передаточное число каждого положения передачи механизма 30 дополнительной трансмиссии задается так, что передаточное число, соответствующее самой верхней линии режима низкой скорости (наибольшее передаточное число режима низкой скорости), меньше передаточного числа, соответствующего самой нижней линии режима высокой скорости (наименьшего передаточного числа режима высокой скорости). Посредством этого диапазон общего передаточного числа трансмиссии 4, который может задаваться в режиме низкой скорости (диапазон передаточного числа в режиме низкой скорости на фиг.3), и диапазон общего передаточного числа трансмиссии 4, который может задаваться в режиме высокой скорости (диапазон передаточного числа в режиме высокой скорости на фиг.3), частично перекрываются. Трансмиссия 4 может быть избирательно переведена в любой из режима низкой скорости и режима высокой скорости, когда рабочая точка трансмиссии 4 находится в области B, заданной между самой нижней линией режима высокой скорости и самой верхней линией режима низкой скорости.
На этой карте переключения передач линия переключения передач для переключения режима, по которой механизм 30 дополнительной трансмиссии переключается, задается так, что она перекрывает самую верхнюю линию режима низкой скорости. Общее передаточное число, соответствующее линии переключения передач для переключения режима (в дальнейшем в этом документе называемое "передаточным числом mRatio переключения режима"), задается как значение, равное наибольшему передаточному числу режима низкой скорости. Линия переключения передач для переключения режима задается таким образом, поскольку входной крутящий момент в механизм 30 дополнительной трансмиссии снижается и толчок от переключения передач при переключении передач механизма 30 дополнительной трансмиссии подавляется по мере того, как передаточное число вариатора 20 снижается.
Когда рабочая точка трансмиссии 4 пересекает линию переключения передач для переключения режима, т.е. фактическое значение общего передаточного числа (в дальнейшем в этом документе называемое фактическим общим передаточным числом Ratio) изменяется выше передаточного числа mRatio переключения режима, контроллер 12 трансмиссии выполняет синхронное переключение передач, которое будет описано ниже, чтобы переключаться между режимом высокой скорости и режимом низкой скорости.
При синхронном переключении передач контроллер 12 трансмиссии переключает передачи механизма 30 дополнительной трансмиссии и изменяет передаточное число вариатора 20 в направлении, противоположном направлению изменения передаточного числа механизма 30 дополнительной трансмиссии. В это время инерционная фаза, в которой передаточное число механизма 30 дополнительной трансмиссии фактически изменяется, и период, в течение которого передаточное число вариатора 20 изменяется, синхронизируются. Передаточное число вариатора 20 изменяется в направлении, противоположном направлению изменения передаточного числа механизма 30 дополнительной трансмиссии, чтобы не допускать чувства дискомфорта, появляющегося у водителя вследствие изменения входного вращения, вызываемого за счет дискретного изменения фактического общего передаточного числа Ratio.
В частности, когда фактическое общее передаточное число Ratio трансмиссии 4 изменяется выше передаточного числа mRatio переключения режима от стороны низких значений к стороне высоких значений, контроллер 12 трансмиссии изменяет положение передачи механизма 30 дополнительной трансмиссии с положения первой передачи на положение второй передачи (переключение передач 1-2) и изменяет передаточное число вариатора 20 к стороне низких значений.
Наоборот, когда фактическое общее передаточное число Ratio трансмиссии 4 изменяется поверх передаточного числа mRatio переключения режима от стороны высоких значений к стороне низких значений, контроллер 12 трансмиссии изменяет положение передачи механизма 30 дополнительной трансмиссии с положения второй передачи на положение первой передачи (переключение передач 2-1) и изменяет передаточное число вариатора 20 к стороне высоких значений.
Поскольку двигатель 1 является двигателем с функцией автоматического глушения и запуска при работе на холостом ходу, контроллер 12 трансмиссии выполняет управление внутренней блокировкой и гидравлическое управление, ассоциированное с автоматическим глушением и запуском двигателя при работе на холостом ходу, которые будут описаны ниже, во время автоматического глушения и запуска двигателя при работе на холостом ходу.
Управление внутренней блокировкой является управлением, выполняемым для того, чтобы предотвращать толчок и внезапное трогание с места, вызываемое, когда вращение двигателя 1, число оборотов которого возросло, непосредственно передается на ведущие колеса 7 через трансмиссию 4, когда двигатель 1 перезапускается в ответ на запрос на трогание с места (например, тормоз выключен). В частности, контроллер 12 трансмиссии устанавливает трансмиссию 4 в состояние внутренней блокировки, в котором входной и выходной вал не могут вращаться, посредством зацепления как тормоза 32 низшей передачи, так и муфты 33 высшей передачи во время автоматического глушения и запуска двигателя при работе на холостом ходу, когда рычаг выбора находится в диапазоне для движения вперед, к примеру в D-диапазоне и L-диапазоне.
Это состояние внутренней блокировки продолжается до тех пор, пока двигатель 1 не перезапускается, и вращение в режиме высокого числа оборотов уменьшается до предварительно определенной частоты вращения на холостом ходу. Муфта 33 высшей передачи может быть расцеплена, чтобы деактивировать состояние внутренней блокировки.
Гидравлическое управление, ассоциированное с автоматическим глушением и запуском двигателя при работе на холостом ходу, является управлением, выполняемым для того, чтобы увеличивать гидравлическое давление (давление PL в магистрали), подаваемое в тормоз 32 низшей передачи, который должен зацепляться при трогании с места, до гидравлического давления, при котором лицевые поверхности противостоящих фрикционных элементов тормоза 32 низшей передачи слегка контактируют, и тормоз 32 низшей передачи начинает формирование передаваемой мощности (гидравлического давления, эквивалентного предварительной зарядке; в дальнейшем в этом документе называемого "требуемым пусковым давлением Prtn") посредством управления электрическим масляным насосом 10e во время автоматического глушения и запуска двигателя при работе на холостом ходу.
Если гидравлическое давление, подаваемое в тормоз 32 низшей передачи, увеличивается до требуемого пускового давления Prtn во время автоматического глушения и запуска двигателя при работе на холостом ходу, можно увеличивать передаваемую мощность тормоза 32 низшей передачи при трогании с места и быстро начинать движение транспортного средства. Гидравлическое давление, подаваемое в тормоз 32 низшей передачи, увеличивается только до требуемого пускового давления Prtn, чтобы подавлять ухудшение экономии топлива и параметров шумности и уменьшение срока службы электрического масляного насоса 10e, вызываемое посредством управления электрическим масляным насосом 10e при рабочей нагрузке, большей, чем требуется.
Если рабочая нагрузка L электрического масляного насоса 10e, необходимая для того, чтобы увеличивать гидравлическое давление, подаваемое в тормоз 32 низшей передачи, до требуемого пускового давления Prtn, является установившейся нагрузкой Lnorm, требуемое пусковое давление Prtn должно быть обеспечено посредством непрерывного управления электрическим масляным насосом 10e при этой установившейся нагрузке Lnorm.
Тем не менее, когда подача топлива в двигатель 1 прекращается и вращение двигателя 1 останавливается посредством автоматического глушения и запуска двигателя при работе на холостом ходу, двигатель 1 может немного вращаться в обратном направлении вследствие силы сжатого воздуха в камере сгорания, которая задвигает поршни обратно, и силы тяготения, действующей на поршни. В этом случае механический масляный насос 10m вращается в обратном направлении и всасывает часть гидравлического давления, подаваемого в тормоз 32 низшей передачи, за счет чего давление PL в магистрали становится ниже требуемого пускового давления Prtn. Если падение давления PL в магистрали в это время является большим и запрос на трогание с места выполняется в это время, задержка до тех пор, пока передаваемая мощность тормоза 32 низшей передачи не увеличится при трогании с места, становится большой, и поэтому затрагиваются пусковые рабочие характеристики транспортного средства.
Соответственно, при гидравлическом управлении, ассоциированном с автоматическим глушением и запуском двигателя при работе на холостом ходу, электрический масляный насос 10e по существу управляется при установившейся нагрузке Lnorm во время автоматического глушения и запуска двигателя при работе на холостом ходу, но рабочая нагрузка L электрического масляного насоса 10e задана выше установившейся нагрузки Lnorm, чтобы уменьшать падение давления PL в магистрали, вызываемое посредством обратного вращения двигателя 1, по меньшей мере, в то время как давление PL в магистрали падает вследствие обратного вращения двигателя 1.
Идеально, рабочая нагрузка L электрического масляного насоса 10e может увеличиваться, пока величина ΔPdrp падения давления PL в магистрали не станет нулем. Тем не менее допустимая величина ΔPallow падения отличается в зависимости от состояния транспортного средства во время автоматического глушения и запуска двигателя при работе на холостом ходу, и работа электрического масляного насоса 10e при высокой нагрузке приводит к ухудшению экономии топлива и шумности и уменьшению срока службы электрического масляного насоса. Таким образом, величина, время начала и период увеличения рабочей нагрузки электрического масляного насоса 10e изменяются согласно состоянию транспортного средства во время автоматического глушения и запуска двигателя при работе на холостом ходу.
Например, когда транспортное средство находится на дороге, идущей в подъем, крутящий момент от поверхности дороги вводится в трансмиссию 4 в дополнение к крутящему моменту от двигателя 1 при трогании с места. Таким образом, гидравлическое давление, требуемое посредством тормоза 32 низшей передачи при трогании с места, становится более высоким. Дополнительно, когда трансмиссия 4 должна быть внутренне заблокирована, число точек подачи гидравлического давления увеличивается, посредством чего объем утечки также увеличивается. Таким образом, требуемый объем масла и требуемое гидравлическое давление возрастают. Следовательно, когда транспортное средство находится на дороге, идущей в подъем, или когда трансмиссия 4 должна быть внутренне заблокирована, величина увеличения рабочей нагрузки L электрического масляного насоса 10e повышается, время начала увеличения продвигается в сторону опережения и период, в течение которого продолжается увеличение, продлевается.
Гидравлическое управление, связанное с автоматическим глушением и запуском двигателя при работе на холостом ходу, выполняемое посредством контроллера 12 трансмиссии, дополнительно описывается ниже со ссылкой на фиг.4 и 5.
Фиг.4 является основной процедурой гидравлического управления, ассоциированного с автоматическим глушением и запуском двигателя при работе на холостом ходу, которая выполняется, когда условие автоматического глушения и запуска двигателя при работе на холостом ходу удовлетворяется.
Это описывается далее. Во-первых, на этапе S1 контроллер 12 трансмиссии задает рабочую нагрузку Lhi в высоконапорном режиме, которая является рабочей нагрузкой L электрического масляного насоса 10e, когда электрический масляный насос 10e работает в высоконапорном режиме, длительность Thi высоконапорного режима, которая является периодом, в течение которого высоконапорный режим продолжается, и пороговое значение Plim перехода в высоконапорный режим, которое является давлением PL в магистрали, когда выполняется переключение установившегося режима в высоконапорный режим. В частности, эти значения соответственно задаются посредством подпрограммы, показанной на фиг.5, согласно состоянию транспортного средства. Содержимое подпрограммы описывается ниже.
На этапе S2 контроллер 12 трансмиссии определяет то, начата или нет отсечка топлива двигателя 1, на основе сигнала отсечки топлива из контроллера двигателя. Процесс переходит к этапу S3, если начало отсечки топлива определяется, в противном случае определение на этапе S2 повторяется.
На этапе S3 контроллер 12 трансмиссии начинает управление электрическим масляным насосом 10e в установившемся режиме. Рабочая нагрузка L электрического масляного насоса 10e в установившемся режиме является установившейся нагрузкой Lnorm, необходимой для того, чтобы формировать требуемое пусковое давление Prtn, которое является гидравлическим давлением, при котором тормоз 32 низшей передачи начинает формирование передаваемой мощности.
На этапе S4 контроллер 12 трансмиссии определяет то, упало или нет давление PL в магистрали ниже порогового значения Plim перехода в высоконапорный режим. Поскольку давление PL в магистрали падает вследствие обратного вращения двигателя 1, если давление PL в магистрали ниже порогового значения Plim перехода в высоконапорный режим, процесс переходит к этапу S5, на котором рабочий режим электрического масляного насоса 10e переключается на высоконапорный режим.
Поскольку пороговое значение Plim перехода в высоконапорный режим задается равным более высокому значению, когда транспортное средство находится на дороге, идущей в подъем, или когда трансмиссия 4 должна быть внутренне заблокирована, чем тогда, когда транспортное средство находится на ровной дороге и трансмиссия 4 не должна быть внутренне заблокирована, рабочий режим переключается из установившегося режима в высоконапорный режим раньше в первом случае, чем во втором случае. С другой стороны, если давление PL в магистрали не ниже порогового значения Plim перехода в высоконапорный режим, процесс возвращается к этапу S3 и работа электрического масляного насоса 10e в установившемся режиме продолжается.
На этапе S5 контроллер 12 трансмиссии увеличивает рабочую нагрузку L электрического масляного насоса 10e от установившейся нагрузки Lnorm до рабочей нагрузки Lhi в высоконапорном режиме, заданной на этапе S1. Таким образом, падение давления PL в магистрали, вызываемое посредством обратного вращения двигателя 1, уменьшается и величина ΔPdrp падения становится меньше допустимой величины ΔPallow падения.
Когда транспортное средство находится на дороге, идущей в подъем, или трансмиссия 4 должна быть внутренне заблокирована, допустимая величина ΔPallow падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1, меньше, чем когда транспортное средство находится на ровной дороге и трансмиссия 4 не должна быть внутренне заблокирована. Тем не менее, поскольку рабочая нагрузка Lhi в высоконапорном режиме задается равной более высокому значению в первом случае, чем во втором случае, как описано ниже, величина ΔPdrp падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1, подавляется так, что она меньше допустимой величины ΔPallow падения даже в этих случаях.
На этапе S6 контроллер 12 трансмиссии определяет то, превышает или нет длительность высоконапорного режима длительность Thi высоконапорного режима, заданную на этапе S1. Когда транспортное средство находится на дороге, идущей в подъем, или трансмиссия 4 должна быть внутренне заблокирована, падение давления PL в магистрали, вызываемое посредством обратного вращения двигателя 1, должно быть меньше и более надежно подавляться, чем тогда, когда транспортное средство находится на ровной дороге и трансмиссия 4 не должна быть внутренне заблокирована. Таким образом, в первом случае длительность Thi высоконапорного режима задается равной большему значению, чем во втором случае, как описано ниже, так что высоконапорный режим продолжается в течение большего времени. Это не допускает завершения высоконапорного режима в момент, когда давление PL в магистрали падает.
Процесс переходит к этапу S7, если длительность Thi высоконапорного режима превышена, в противном случае процесс возвращается к этапу S5, чтобы продолжать высоконапорный режим.
На этапе S7 контроллер 12 трансмиссии переключает рабочий режим электрического масляного насоса 10e в установившийся режим, посредством чего рабочая нагрузка L электрического масляного насоса 10e уменьшается до установившейся нагрузки Lnorm. Поскольку двигатель 1 по существу не вращается в обратном направлении за исключением момента непосредственно после того, как двигатель 1 прекращает вращение, требуемое пусковое давление Prtn может быть обеспечено посредством управления электрическим масляным насосом 10e при установившейся нагрузке Lnorm.
На этапе S8 контроллер 12 трансмиссии определяет то, превышает или нет давление PL в магистрали предварительно определенное давление Pmec. Предварительно определенное давление Pmec задается равным значению, допускающему определение того, что двигатель 1 перезапущен, и механический масляный насос 10m начинает формирование достаточного гидравлического давления. Процесс заканчивается, если определяется то, что давление PL в магистрали превышает предварительно определенное давление Pmec, в противном случае процесс возвращается к этапу S7, чтобы продолжать установившийся режим.
Фиг.5 является подпрограммой, выполняемой на этапе S1 с фиг.4.
Теперь это будет раскрыто более подробно. Во-первых, на этапах S11-S13 контроллер 12 трансмиссии определяет то, находится или нет транспортное средство на дороге, идущей в подъем (S11), и должна или нет быть заблокирована трансмиссия 4 (S12, S13). Определение в отношении того, находится или нет транспортное средство на дороге, идущей в подъем, выполняется на основе выходного сигнала из датчика 47 градиента. Определение в отношении того, должна или нет трансмиссия 4 быть внутренне заблокирована, выполняется на основе выходного сигнала из переключателя 45 режима движения. В частности, определяется, что трансмиссия 4 должна быть внутренне заблокирована, если рычаг выбора находится в диапазоне для движения вперед, тогда как определяется, что трансмиссия 4 не должна быть внутренне заблокирована, если рычаг выбора находится в диапазоне, отличном от указанного. Процесс переходит к любому из S14-S17 согласно результатам определения на этапах S11-S13.
На этапах S14-S17 контроллер 12 трансмиссии задает рабочую нагрузку Lhi в высоконапорном режиме равной значению L1-L4, длительность Thi высоконапорного режима равной значению T1-T4 и пороговое значение Plim перехода в высоконапорный режим равным значению P1-P4 согласно четырем шаблонам, определенным посредством того, находится или нет транспортное средство на дороге, идущей в подъем, и должна или нет трансмиссия 4 быть внутренне заблокирована.
Любое из L1-L4 является значением, превышающим установившуюся нагрузку Lnorm электрического масляного насоса 10e. Любое из T1-T4 является периодом, превышающим длительность падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1, полученного в ходе эксперимента и т.п. Любое из P1-P4 является значением, превышающим требуемое пусковое давление Prtn. Любое из рабочей нагрузки Lhi в высоконапорном режиме, длительности Thi высоконапорного режима и порогового значения Plim перехода в высоконапорный режим принимает максимальное значение L4, T4, P4, когда транспортное средство находится на дороге, идущей в подъем, и трансмиссия 4 должна быть внутренне заблокирована, при этом принимая минимальное значение L1, T1, P1, когда транспортное средство находится на ровной дороге и внутренняя блокировка не должна выполняться. Т.е. следующие взаимосвязи удовлетворяются между L1-L4, T1-T4 и P1-P4:
L4>L3, L2>L1,
T4>T3, T2>T1 и
P4>P3, P2>P1.
Взаимосвязи абсолютных величин L2, T2, P2 и L3, T3, P3 определяются посредством взаимосвязи абсолютных величин для допустимой величины ΔPallow падения, когда транспортное средство находится на дороге, идущей в подъем, и допустимой величины ΔPallow падения, когда трансмиссия 4 должна быть внутренне заблокирована.
Соответственно, в конкретном состоянии транспортного средства, в котором допустимая величина ΔPallow падения снижается, т.е. в состоянии транспортного средства, в котором транспортное средство находится на дороге, идущей в подъем, и/или трансмиссия 4 должна быть внутренне заблокирована (S14-S16), электрический масляный насос 10e переключается на высоконапорный режим раньше, чтобы повышать величину увеличения рабочей нагрузки электрического масляного насоса 10e в высоконапорном режиме и задавать длительность высоконапорного режима большей, чем в состоянии транспортного средства, в котором транспортное средство находится на ровной дороге и трансмиссия 4 не должна быть внутренне заблокирована (S17).
Поскольку допустимая величина ΔPallow падения давления PL в магистрали становится наименьшей, если транспортное средство находится на дороге, идущей в подъем, и трансмиссия 4 должна быть внутренне заблокирована (S14), высоконапорный режим переключается раньше всего, величина увеличения рабочей нагрузки электрического масляного насоса 10e становится наибольшей и высоконапорный режим продолжается в течение наиболее длительного периода в вышеуказанном конкретном состоянии транспортного средства.
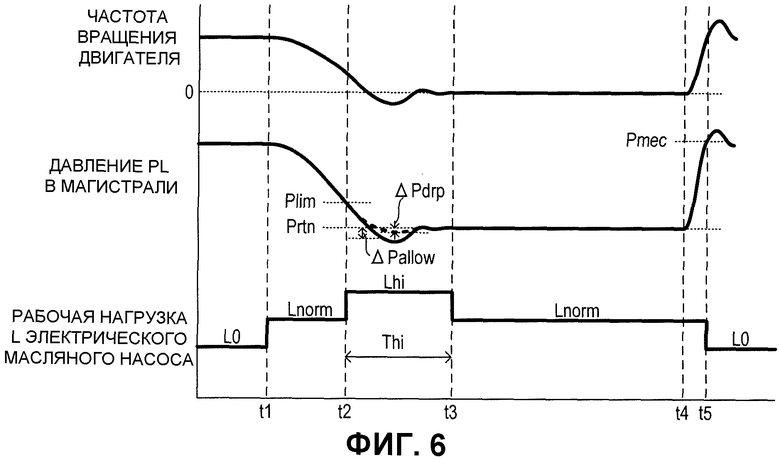
Фиг.6 показывает рабочее состояние электрического масляного насоса 10e в то время, когда выполняется автоматическое глушение и запуск двигателя при работе на холостом ходу двигателя 1.
Когда условие автоматического глушения и запуска двигателя при работе на холостом ходу удовлетворяется и отсечка топлива двигателя 1 начинается во время t1, рабочая нагрузка L электрического масляного насоса 10e увеличивается от предпусковой нагрузки L0 до установившейся нагрузки Lnorm в установившемся режиме и электрический масляный насос 10e начинает работу. Рабочая нагрузка L электрического масляного насоса 10e в установившемся режиме является установившейся нагрузкой Lnorm, при которой получается требуемое пусковое давление Prtn. Поскольку частота вращения двигателя 1 снижается и давление на выходе механического масляного насоса 10m снижается, давление PL в магистрали снижается с прохождением времени (время t1-t2).
Когда давление PL в магистрали становится ниже порогового значения Plim перехода в высоконапорный режим во время t2, рабочий режим электрического масляного насоса 10e переключается из установившегося режима в высоконапорный режим в ходе подготовки к падению давления PL в магистрали, вызываемому посредством обратного вращения двигателя 1. Рабочая нагрузка L электрического масляного насоса 10e в высоконапорном режиме задается равной нагрузке Lhi, превышающей установившуюся нагрузку Lnorm, при которой получается требуемое пусковое давление Prtn. Когда рабочий режим электрического масляного насоса 10e переключается на высоконапорный режим, частота вращения электрического масляного насоса 10e увеличивается и расход на выходе электрического масляного насоса 10e увеличивается.
После этого давление PL в магистрали падает и становится ниже требуемого пускового давления Prtn вследствие обратного вращения двигателя 1 сразу после того, как двигатель 1 прекращает вращение (время t2-t3). Тем не менее, поскольку электрический масляный насос 10e переключается на высоконапорный режим и расход на выходе электрического масляного насоса 10e увеличивается во время t2, падение (пунктирная линия) давления PL в магистрали становится меньше падения (сплошная линия), когда электрический масляный насос 10e остается работать в установившемся режиме, и величина ΔPdrp падения давления PL в магистрали подавляется так, что она меньше допустимой величины ΔPallow падения, определенной посредством состояния транспортного средства.
Высоконапорный режим электрического масляного насоса 10e продолжается, по меньшей мере, в течение длительности Thi высоконапорного режима, превышающей период, в течение которого давление PL в магистрали падает вследствие обратного вращения двигателя 1 (время t2-t3), и высоконапорный режим не завершается в момент, когда давление PL в магистрали падает.
Когда двигатель 1 перезапускается в ответ на запрос на трогание с места во время t4, начинается приведение в действие механического масляного насоса 10m посредством двигателя 1. Когда давление PL в магистрали превышает предварительно определенное давление Pmec во время t5, гидравлическое управление, ассоциированное с автоматическим глушением и запуском двигателя при работе на холостом ходу, заканчивается посредством уменьшения рабочей нагрузки L электрического масляного насоса 10e до предпусковой нагрузки L0 и обнуления давления на выходе электрического масляного насоса 10e.
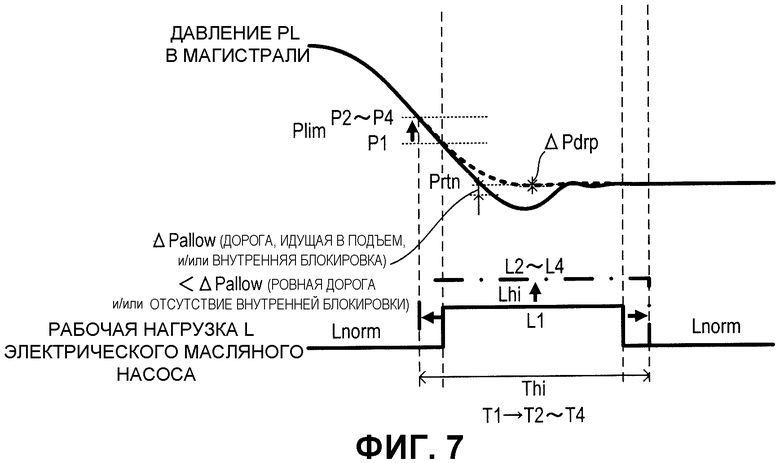
Фиг.7 показывает состояние, в котором рабочая нагрузка Lhi в высоконапорном режиме, длительность Thi высоконапорного режима и пороговое значение Plim перехода в высоконапорный режим изменяются, когда транспортное средство находится на дороге, идущей в подъем, или когда трансмиссия 4 должна быть внутренне заблокирована.
В конкретном состоянии транспортного средства, в котором транспортное средство находится на дороге, идущей в подъем, или трансмиссия 4 должна быть внутренне заблокирована, допустимая величина ΔPallow падения давления PL в магистрали меньше, чем когда транспортное средство находится на ровной дороге или когда трансмиссия 4 не должна быть внутренне заблокирована. Согласно вышеуказанному гидравлическому управлению, связанному с автоматическим глушением и запуском двигателя при работе на холостом ходу, электрический масляный насос 10e переключается на высоконапорный режим раньше, величина увеличения рабочей нагрузки L электрического масляного насоса 10e в высоконапорном режиме повышается и высоконапорный режим продолжается в течение более длительного периода в таком конкретном состоянии транспортного средства (штрихпунктирная линия).
Таким образом, падение давления PL в магистрали, вызываемое посредством обратного вращения двигателя 1, может быть дополнительно уменьшено, как показано посредством пунктирной линии, даже в конкретном состоянии транспортного средства, и можно не допускать превышения посредством величины ΔPdrp падения давления PL в магистрали допустимой величины ΔPallow падения даже в указанном состоянии транспортного средства, в котором допустимая величина ΔPallow падения снижается.
Далее описываются функции и преимущества, достигаемые посредством выполнения вышеуказанного гидравлического управления, ассоциированного с автоматическим глушением и запуском двигателя при работе на холостом ходу.
Согласно гидравлическому управлению, ассоциированному с автоматическим глушением и запуском двигателя при работе на холостом ходу, электрический масляный насос 10e по существу управляется в установившемся режиме, в котором рабочая нагрузка L задается равной установившейся нагрузке Lnorm, во время автоматического глушения и запуска двигателя при работе на холостом ходу. Тем не менее электрический масляный насос 10e работает в высоконапорном режиме, в котором рабочая нагрузка L задается равной нагрузке Lhi, превышающей установившуюся нагрузку Lnorm, в течение предварительно определенного периода после того, как двигатель 1 прекращает вращение (прямое вращение), в частности, по меньшей мере, в течение периода, в течение которого гидравлическое давление, подаваемое в тормоз 32 низшей передачи, т.е. давление PL в магистрали, падает вследствие обратного вращения двигателя 1, возникающего сразу после того, как двигатель 1 прекращает вращение. Таким образом, падение давления PL в магистрали, вызываемое посредством обратного вращения двигателя 1, может быть уменьшено, передаваемая мощность тормоза 32 низшей передачи может быть увеличена посредством быстрого увеличения давления PL в магистрали, даже когда запрос на трогание с места выполняется во время, когда давление PL в магистрали падает, и могут быть получены хорошие пусковые характеристики.
Дополнительно, когда давление PL в магистрали становится ниже порогового значения Plim перехода в высоконапорный режим, определяется то, что давление PL в магистрали падает и электрический масляный насос 10e работает в высоконапорном режиме. Таким образом, электрический масляный насос 10e может работать в высоконапорном режиме в соответствии со временем падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1.
Дополнительно, пороговое значение Plim перехода в высоконапорный режим задается равным гидравлическому давлению, равному или превышающему требуемое пусковое давление Prtn, при котором тормоз 32 низшей передачи начинает формирование передаваемой мощности. Таким образом, работа электрического масляного насоса 10e в высоконапорном режиме может начинаться раньше падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1, и падение давления PL в магистрали может более надежно подавляться.
Дополнительно, установившаяся нагрузка Lnorm задается равной нагрузке, необходимой для того, чтобы увеличивать давление PL в магистрали до требуемого пускового давления Prtn. Таким образом, экономия топлива и бесшумность могут быть повышены посредством подавления рабочей нагрузки электрического масляного насоса 10e до низкого уровня, в то время как хорошие пусковые рабочие характеристики обеспечиваются в течение периода, отличного от периода падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1.
Дополнительно, в высоконапорном режиме рабочая нагрузка электрического масляного насоса 10e увеличивается до тех пор, пока величина ΔPdrp падения давления PL в магистрали, вызываемого посредством обратного вращения двигателя 1, не станет меньше допустимой величины ΔPallow падения. Таким образом, величина увеличения нагрузки электрического масляного насоса 10e в высоконапорном режиме подавляется до минимально необходимого уровня, посредством чего может подавляться ухудшение экономии топлива и бесшумности и уменьшение срока службы электрического масляного насоса 10e, вызываемые посредством увеличения рабочей нагрузки электрического масляного насоса 10e в большей степени, чем требуется.
Если непроблематично управлять электрическим масляным насосом 10e при высокой нагрузке, рабочая нагрузка электрического масляного насоса 10e может быть увеличена до тех пор, пока величина ΔPdrp падения давления PL в магистрали не станет нулем, или электрический масляный насос 10e может работать при максимальной нагрузке. Альтернативно, электрический масляный насос 10e может работать в высоконапорном режиме с начала автоматического глушения и запуска двигателя при работе на холостом ходу.
Дополнительно, если автоматическое глушение и запуск двигателя при работе на холостом ходу выполняется в конкретном состоянии транспортного средства, в котором допустимая величина ΔPallow падения давления PL в магистрали снижается, например, если транспортное средство находится на дороге, идущей в подъем, или трансмиссия 4 должна быть внутренне заблокирована, переключение в высоконапорный режим выполняется раньше и величина увеличения в высоконапорном режиме и длительность высоконапорного режима повышаются. Таким образом, время переключения высоконапорного режима, величина увеличения давления в высоконапорном режиме и длительность высоконапорного режима надлежащим образом задаются согласно состоянию транспортного средства, и величина ΔPdrp падения давления PL в магистрали может быть задана меньше допустимой величины ΔPallow падения даже в конкретном состоянии транспортного средства, в котором допустимая величина ΔPallow падения снижается.
Дополнительно, согласно гидравлическому управлению, ассоциированному с автоматическим глушением и запуском двигателя при работе на холостом ходу, переключение в высоконапорный режим выполняется неизменно во время автоматического глушения и запуска двигателя при работе на холостом ходу, но допустимая величина ΔPallow падения давления PL в магистрали является относительно большой, когда конкретное состояние транспортного средства не задается. Таким образом, переключение в высоконапорный режим может выполняться только тогда, когда автоматическое глушение и запуск двигателя при работе на холостом ходу выполняется в конкретном состоянии транспортного средства, в котором падение давления PL в магистрали является, в частности, проблематичным. Это позволяет уменьшать частоту переключения электрического масляного насоса 10e в высоконапорный режим и дополнительно подавлять ухудшение топливной экономичности и бесшумности и уменьшение срока службы электрического масляного насоса 10e, вызываемое посредством работы электрического масляного насоса 10e при высокой нагрузке.
Хотя вариант осуществления настоящего изобретения описан выше, вышеописанный вариант осуществления является просто иллюстрацией одного примера варианта применения настоящего изобретения и не имеет такой характер, чтобы ограничивать объем настоящего изобретения конкретной конфигурацией вышеописанного варианта осуществления.
Например, хотя рабочая нагрузка Lhi в высоконапорном режиме, длительность Thi высоконапорного режима и пороговое значение Plim перехода в высоконапорный режим увеличиваются, когда транспортное средство находится на дороге, идущей в подъем, или когда трансмиссия 4 должна быть внутренне заблокирована, в вышеприведенном варианте осуществления один или два из этих параметров могут быть увеличены.
Дополнительно, хотя электрический масляный насос 10e работает в высоконапорном режиме в течение периода, во время которого давление PL в магистрали, которое является гидравлическим давлением, подаваемым в тормоз 32 низшей передачи, падает вследствие обратного вращения двигателя 1, возникающего сразу после того, как двигатель 1 прекращает вращение, в вышеприведенном варианте осуществления функция и преимущество уменьшения величины ΔPdrp падения давления PL в магистрали достигаются, если электрический масляный насос 10e работает в высоконапорном режиме, по меньшей мере, в течение части этого периода. Например, рабочий режим электрического масляного насоса 10e может переключаться на высоконапорный режим после истечения предварительно определенного времени после остановки двигателя 1, или рабочий режим электрического масляного насоса 10e может возвращаться в установившийся рабочий режим до того, как величина ΔPdrp падения давления PL в магистрали станет нулевой (во время падения).
Дополнительно, хотя переключение в высоконапорный режим выполняется, когда давление PL в магистрали, которое является гидравлическим давлением, подаваемым в тормоз 32 низшей передачи, опускается ниже порогового значения Plim перехода в высоконапорный режим в вышеприведенном варианте осуществления, переключение в высоконапорный режим может выполняться на основе сравнения между истекшим временем от начала отсечки топлива двигателя 1 и пороговым значением. В этом случае, если пороговое значение становится меньше в конкретном состоянии транспортного средства, время переключения в высоконапорный режим может продвигаться вперед в конкретном состоянии транспортного средства.
Альтернативно, угол поворота коленчатого вала, когда двигатель 1 прекращает вращение, может быть определен посредством датчика угла поворота коленчатого вала, и переключение в высоконапорный режим может выполняться, когда определенный угол поворота коленчатого вала является углом, при котором возникает обратное вращение двигателя 1, поскольку то, возникает или нет обратное вращение двигателя 1, когда двигатель 1 прекращает вращение, определяется по существу посредством угла поворота коленчатого вала, когда двигатель 1 прекращает вращение.
Дополнительно, источник приведения в движение транспортного средства может быть комбинацией двигателя 1 и электромотора. Дополнительно, трансмиссия 4 может быть ступенчатой автоматической трансмиссией, клиноременной бесступенчатой трансмиссией или тороидальной бесступенчатой трансмиссией, и в этом случае пусковой элемент фрикционного зацепления является пусковой муфтой механизма переключения передач для движения вперед/назад.
Для вышеприведенного описания содержимое заявки на патент Японии № 2010-52372, поданной 9 марта 2010 года, включено в данный документ посредством ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2011 |
|
RU2509939C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2691504C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСТОЧНИКОМ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ И АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2016 |
|
RU2723012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСТОЧНИКОМ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ И АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2016 |
|
RU2722809C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСМИССИОННОГО МЕХАНИЗМА | 2011 |
|
RU2509243C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ОТКАЗОУСТОЙЧИВЫМ РЕЖИМОМ ДВИЖЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2670562C1 |
| БЕССТУПЕНЧАТЫЙ ВАРИАТОР | 2009 |
|
RU2488722C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2673306C1 |
| Силовая установка транспортного средства | 1985 |
|
SU1281706A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657624C1 |
Изобретение относится к автоматической трансмиссии и способу ее гидравлического управления. Автоматическая трансмиссия содержит механический масляный насос, который приводится в действие посредством мощности двигателя, электрический масляный насос, пусковой элемент фрикционного зацепления, в который подается гидравлическое давление, созданное в механическом масляном насосе или электрическом масляном насосе, и средство гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу. При этом средство гидравлического управления управляет электрическим масляным насосом в высоконапорном режиме, в котором рабочая нагрузка электрического масляного насоса задается равной нагрузке, превышающей установившуюся нагрузку, в течение предварительно определенного периода, когда двигатель прекращает вращение. Достигается улучшение пусковых характеристик устройства. 2 н. и 14 з.п. ф-лы, 7 ил.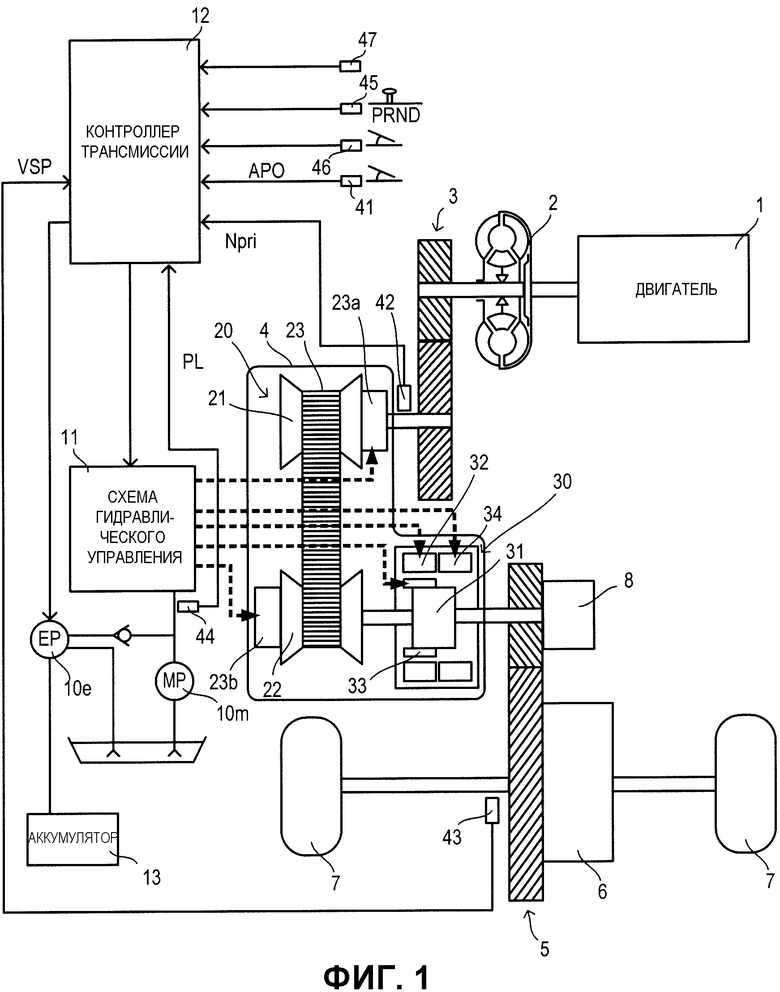
1. Автоматическая трансмиссия (4), комбинируемая с двигателем (1), который выполняет автоматическое глушение и запуск при работе на холостом ходу, содержащая:
механический масляный насос (10m), который приводится в действие посредством мощности двигателя (1);
электрический масляный насос (10e);
пусковой элемент (32) фрикционного зацепления, в который подается гидравлическое давление, созданное в механическом масляном насосе (10m) или электрическом масляном насосе (10e); и
средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, выполненное с возможностью управления электрическим масляным насосом (10e) в установившемся режиме, в котором рабочая нагрузка электрического масляного насоса (10e) задается равной установившейся нагрузке, во время автоматического глушения и запуска двигателя при работе на холостом ходу, но управляет электрическим масляным насосом (10e) в высоконапорном режиме, в котором рабочая нагрузка электрического масляного насоса (10e) задается равной нагрузке, превышающей установившуюся нагрузку, в течение предварительно определенного периода, когда двигатель (1) прекращает вращение.
2. Автоматическая трансмиссия (4) по п.1, в которой предварительно определенный период является, по меньшей мере, периодом, в течение которого гидравлическое давление, подаваемое в пусковой элемент (32) фрикционного зацепления, падает вследствие обратного вращения двигателя (1), возникающего сразу после того, как двигатель (1) прекращает вращение.
3. Автоматическая трансмиссия (4) по п.1 или 2, дополнительно содержащая средство (12) определения падения гидравлического давления, выполненное с возможностью определения того, падает ли или нет гидравлическое давление, подаваемое в пусковой элемент (32) фрикционного зацепления, когда гидравлическое давление, передаваемое в пусковой элемент (32) фрикционного зацепления, опускается ниже предварительно определенного гидравлического давления,
при этом средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, управляет электрическим масляным насосом (10e) в высоконапорном режиме, когда падение гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления, определяется посредством средства (12) определения падения гидравлического давления.
4. Автоматическая трансмиссия (4) по п.3, в которой предварительно определенное гидравлическое давление задается равным гидравлическому давлению, при котором пусковой элемент (32) фрикционного зацепления начинает формирование передаваемой мощности.
5. Автоматическая трансмиссия (4) по п.1 или 2, в которой установившаяся нагрузка является нагрузкой, необходимой для того, чтобы увеличивать гидравлическое давление, подаваемое в пусковой элемент (32) фрикционного зацепления, до гидравлического давления, при котором элемент фрикционного зацепления начинает формирование передаваемой мощности.
6. Автоматическая трансмиссия (4) по п.1 или 2, в которой средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, увеличивает рабочую нагрузку электрического масляного насоса (10e) в высоконапорном режиме до тех пор, пока падение гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления, не станет меньше допустимой величины падения.
7. Автоматическая трансмиссия (4) по п.1 или 2, дополнительно содержащая средство (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу, выполненное с возможностью определения того, должно ли или нет выполняться автоматическое глушение и запуск двигателя при работе на холостом ходу в конкретном состоянии транспортного средства, в котором снижается допустимая величина падения гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления,
при этом средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, задает большую величину увеличения рабочей нагрузки электрического масляного насоса (10e) в высоконапорном режиме, чем в иных случаях, когда определено, что автоматическое глушение и запуск двигателя при работе на холостом ходу должно выполняться в конкретном состоянии транспортного средства посредством средства (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу.
8. Автоматическая трансмиссия (4) по п.1 или 2, дополнительно содержащая средство (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу, выполненное с возможностью определения того, должно ли или нет выполняться автоматическое глушение и запуск двигателя при работе на холостом ходу в конкретном состоянии транспортного средства, в котором снижается допустимая величина падения гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления,
при этом средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, переключает электрический масляный насос (10e) из установившегося режима в высоконапорный режим раньше, чем в иных случаях, когда определено, что автоматическое глушение и запуск двигателя при работе на холостом ходу должно выполняться в конкретном состоянии транспортного средства посредством средства (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу.
9. Автоматическая трансмиссия (4) по п.1 или 2, дополнительно содержащая средство (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу, которое определяет то, должно или нет выполняться автоматическое глушение и запуск двигателя при работе на холостом ходу в конкретном состоянии транспортного средства, в котором снижается допустимая величина падения гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления,
при этом средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, задает большую длительность высоконапорного режима, чем в иных случаях, когда определено, что автоматическое глушение и запуск двигателя при работе на холостом ходу должно выполняться в конкретном состоянии транспортного средства посредством средства (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу.
10. Автоматическая трансмиссия (4) по п.1 или 2, дополнительно содержащая средство (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу, которое определяет то, должно или нет выполняться автоматическое глушение и запуск двигателя при работе на холостом ходу в конкретном состоянии транспортного средства, в котором снижается допустимая величина падения гидравлического давления, подаваемого в пусковой элемент (32) фрикционного зацепления,
при этом средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, переключает электрический масляный насос (10e) из установившегося режима в высоконапорный режим только тогда, когда определено, что автоматическое глушение и запуск двигателя при работе на холостом ходу должно выполняться в конкретном состоянии транспортного средства посредством средства (12) определения состояния транспортного средства при автоматическом глушении и запуске двигателя при работе на холостом ходу.
11. Автоматическая трансмиссия (4) по п.7, в которой конкретное состояние транспортного средства является состоянием, в котором транспортное средство находится на дороге, идущей в подъем.
12. Автоматическая трансмиссия (4) по п.7, в которой конкретное состояние транспортного средства является состоянием, в котором автоматическая трансмиссия (4) должна быть внутренне заблокирована.
13. Автоматическая трансмиссия (4) по п.7, в которой:
конкретное состояние транспортного средства включает в себя состояние, в котором транспортное средство находится на дороге, идущей в подъем, состояние, в котором автоматическая трансмиссия (4) должна быть внутренне заблокирована, и состояние, в котором транспортное средство находится на дороге, идущей в подъем, и должна быть использована автоматическая трансмиссия (4); и
средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, задает наибольшую величину увеличения при повышении рабочей нагрузки электрического масляного насоса (10e) в высоконапорном режиме в конкретном состоянии транспортного средства, когда транспортное средство находится на дороге, идущей в подъем, и автоматическая трансмиссия (4) должна быть внутренне заблокирована.
14. Автоматическая трансмиссия (4) по п.7, в которой:
конкретное состояние транспортного средства включает в себя состояние, в котором транспортное средство находится на дороге, идущей в подъем, состояние, в котором автоматическая трансмиссия (4) должна быть внутренне заблокирована, и состояние, в котором транспортное средство находится на дороге, идущей в подъем, и должна быть использована автоматическая трансмиссия (4); и
средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, переключает электрический масляный насос (10e) из установившегося режима в высоконапорный режим раньше всего в конкретном состоянии транспортного средства, когда транспортное средство находится на дороге, идущей в подъем, и автоматическая трансмиссия (4) должна быть внутренне заблокирована.
15. Автоматическая трансмиссия (4) по п.7, в которой:
конкретное состояние транспортного средства включает в себя состояние, в котором транспортное средство находится на дороге, идущей в подъем, состояние, в котором автоматическая трансмиссия (4) должна быть внутренне заблокирована, и состояние, в котором транспортное средство находится на дороге, идущей в подъем, и должна быть использована автоматическая трансмиссия (4); и
средство (12) гидравлического управления, связанного с автоматическим глушением и запуском двигателя при работе на холостом ходу, задает наибольшую длительность высоконапорного режима в конкретном состоянии транспортного средства, когда транспортное средство находится на дороге, идущей в подъем, и автоматическая трансмиссия (4) должна быть внутренне заблокирована.
16. Способ гидравлического управления для автоматической трансмиссии (4), комбинируемой с двигателем (1), который выполняет автоматическое глушение и запуск при работе на холостом ходу, включающей в себя механический масляный насос (10m), который приводится в действие посредством мощности двигателя (1), электрический масляный насос (10e) и пусковой элемент (32) фрикционного зацепления, в который передается гидравлическое давление, сформированное в механическом масляном насосе или электрическом масляном насосе (10e), включающий этап, на котором:
управляют электрическим масляным насосом (10e) в установившемся режиме, в котором рабочая нагрузка электрического масляного насоса (10e) задается равной установившейся нагрузке, во время автоматического глушения и запуска двигателя при работе на холостом ходу, но управляют в высоконапорном режиме, в котором рабочая нагрузка электрического масляного насоса (10e) задается равной нагрузке, превышающей установившуюся нагрузку, в течение предварительно определенного периода, когда двигатель (1) прекращает вращение.
| JP 2010047099 A, 04.03.2010 | |||
| EP 1995497 A1, 26.11.2008 | |||
| US 2009177361 A1, 09.07.2009 | |||
| US 2007173370 A1, 26.07.2007. |

