Изобретение относится к системам автоматического управления вооружением, в частности к стабилизаторам танкового вооружения.
Известен стабилизатор танкового вооружения (Пат. РФ №2421679) (принят за прототип), содержащий приводы вертикального и горизонтального наведения, пушку, блок управления и соединенные с ним датчик абсолютной скорости пушки и блок датчиков и вспомогательных устройств, усилитель мощности, электрически связанный с блоком управления, блок управления снабжен модулем обработки сигналов, выполненным с возможностью обработки сигналов обратных связей, формируемых усилителем мощности, датчиком абсолютной скорости, при этом привод вертикального наведения выполнен электрическим, включающим электроцилиндр, состоящий из электродвигателя с датчиком положения ротора, электродвигателя, связанного с усилителем мощности, и силовую винтовую обратимую передачу, которая механически связана с валом электродвигателя для обеспечения возможности поворота пушки.
Недостатком стабилизатора танкового вооружения по прототипу является относительно низкая точность стабилизации привода вертикального наведения (ВН), обусловленная двумя основными факторами: низким кпд винтовой механической передачи и инерционностью якоря исполнительного электродвигателя, который в режиме стабилизации создает значительные возмущающие воздействия на объект стабилизации (пушку).
Заявленное техническое решение направлено на повышение точности приводов ВН за счет введения в структуру привода двухканальной, автоматически настраиваемой схемы компенсации ошибки от возмущающих колебаний танка в плоскости перемещения пушки.
На чертеже показана функциональная схема предлагаемого стабилизатора танкового вооружения.
Для достижения обеспечиваемого изобретением технического результата в стабилизатор танкового вооружения, содержащий электрический привод горизонтального наведения (ГН), механически соединенный с башней, электрический привод вертикального наведения (ЭП ВН) 4, включающий электродвигатель с датчиком положения ротора, электрически связанный с усилителем мощности, и механический подъемник, соединенный с пушкой, блок датчиков (БД)1, механически и электрически связанный с башней и пушкой танка, введены блок обработки сигналов (БОС), включающий усилительно-преобразующее устройство (УПУ) 3 и модуль автоматической компенсации (МАК), датчик скорости переносного движения (ДСПД) 5, размещенный на башне танка, а модуль автоматической компенсации содержит первый 2 и второй 13 сумматоры (СУ), дифференциатор (ДИФ) 6, первое 7, второе 8, третье 11 и четвертое 12 множительные устройства (МУ), первый 9 и второй 10 интеграторы (И), при этом БД1 (измеритель ошибки стабилизации по каналу ВН) соединен с первым входом первого СУ 2, а также первыми входами первого МУ 7 и второго МУ 8, выход ДСПД 5 соединен со вторыми входами первого МУ 7 и третьего МУ 11, а также с ДИФ 6, выход которого соединен со вторыми входами второго МУ 8 и четвертого МУ 12, выходы первого МУ 7 и второго МУ 8 соединены соответственно со входами интеграторов 9 и 10, выходы которых соединены с первыми входами третьего МУ 11 и четвертого МУ 12, выходы которых соединены соответственно с первым и вторым входами второго СУ 13, выход которых соединен со вторым входом первого СУ 2, выход которого соединен с последовательно соединенными УПУ 3 и приводом ЭП ВН 4.
Рассмотрим работу схемы автоматической компенсации ошибки электрического привода ВН. При движении танка по пересеченной местности возникает ошибка стабилизации, основной причиной которой являются возмущающие колебания корпуса и башни танка в плоскости перемещения пушки. Общий принцип компенсации ошибки заключается в том, что в контур управления привода подается компенсационный сигнал, являющийся функцией возмущающего сигнала, вызвавшего ошибку. Выработанный компенсационный сигнал должен по амплитуде и фазе совпадать в точке суммирования с сигналом ошибки без компенсации. Для линейной системы при точном совпадении амплитуды и фазы сигнал компенсации станет управляющим, а ошибка будет равной нулю. В реальной нелинейной системе этого достигнуть полностью нельзя, но можно уменьшить ошибку в несколько раз.
Таким образом, в схеме автоматической компенсации решаются две задачи. Первая задача - обеспечение синфазности компенсационного сигнала и сигнала ошибки без компенсации. Эта задача решается суммированием в нужной пропорции прямого и квадратурного сигналов скорости башни в плоскости перемещения пушки. В предлагаемом техническом решении прямым сигналом является сигнал скорости колебаний башни (выход ДСПД 5), а квадратурный сигнал получается путем дифференцирования сигнала скорости башни (ДИФ 6). Далее каждый из сигналов подвергается автоматическому масштабированию (самонастройке), проходя через блоки 7, 9, 11 (прямой канал) и 8, 10, 12 (квадратурный канал) с последующим их суммированием во втором СУ 13.
Рассмотрим процесс автоматической настройки компенсационного сигнала на примере прямого канала. В канале предусмотрено МУ 7, осуществляющее перемножение сигнала ошибки, поступающего из БД 1, и сигнала скорости башни (выход ДСПД 5) и последовательно соединенный с ним первый И 9. В связи с тем, что постоянная времени интегратора выбирается достаточно большой, интегратор будет реагировать (накапливать сигнал) на постоянную, или медленно изменяющуюся составляющую сигнала на своем входе (т.е. на выходе МУ 7). Постоянная составляющая на выходе первого МУ 7 станет равной нулю (состояние равновесия) только в случае отсутствия (полной компенсации) в сигнале ошибки синфазной с сигналом скорости башни составляющей. Третий МУ 11, на входы которого поступают соответственно сигналы с первого И 9 и сигнал скорости башни с ДСПД 5, является регулятором уровня компенсационного сигнала по синфазной составляющей.
Аналогичным образом работает канал по квадратурной составляющей скорости башни (поз. 8, 10, 12). Его роль выработать такой уровень квадратурной составляющей компенсационного сигнала, чтобы суммарный сигнал со второго СУ 13, поданный в УПУ 3, обеспечил минимум ошибки стабилизации привода.
Эффективность предлагаемого технического решения проверена при испытаниях электрического привода наведения и стабилизации танковой пушки на стенде предприятия ОАО ВНИИ «Сигнал», а также при испытаниях привода в составе танка Т-72 в ОАО "УКБТМ" (отчет по испытаниям, октябрь 2011 г.). Испытания показали, что предлагаемая в заявке двухканальная схема автоматической компенсации позволяет в несколько раз снизить ошибку стабилизации по сравнению с прототипом и довести ее до уровня перспективных требований.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ | 2013 |
|
RU2530438C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 2003 |
|
RU2238506C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 1993 |
|
RU2118783C1 |
| УСОВЕРШЕНСТВОВАННЫЙ ТАНКОВЫЙ СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2010 |
|
RU2429440C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
Изобретение относится к стабилизаторам танкового вооружения. Стабилизатор танкового вооружения содержит блок датчиков обработки сигналов, включающий усилительно-преобразующее устройство и модуль автоматической компенсации, датчик скорости переносного движения, размещенный на башне танка. Модуль автоматической компенсации содержит первый и второй сумматоры, дифференциатор, первое, второе, третье и четвертое множительные устройства, первый и второй интеграторы. Блок датчиков соединен с первым входом первого сумматора, а также первыми входами первого и второго множительных устройств. Выход датчика скорости переносного движения соединен со вторыми входами первого и третьего множительных устройств, а также с дифференциатором, выход которого соединен со вторыми входами второго и четвертого множительных устройств, а выходы первого и второго множительных устройств соединены соответственно со входами интеграторов, выходы которых соединены с первыми входами третьего и четвертого множительных устройств. Выходы третьего и четвертого множительных устройств соединены соответственно с первым и вторым входами второго сумматора, выход которого соединен со вторым входом первого сумматора. Повышается точность электрического привода вертикального наведения и стабилизации танкового вооружения. 1 ил.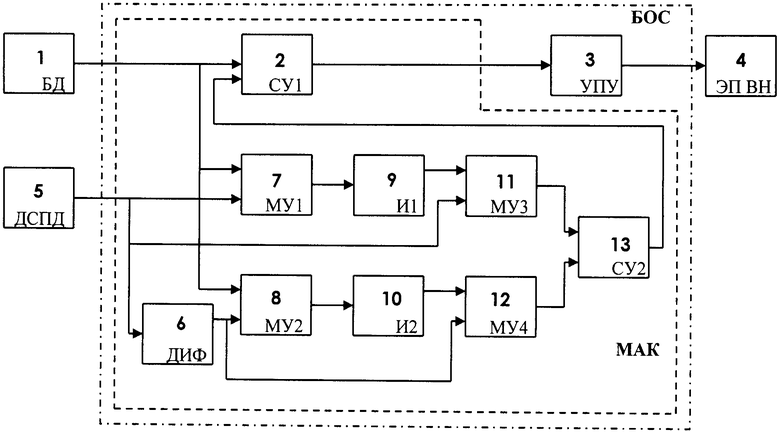
Стабилизатор танкового вооружения, содержащий электрический привод горизонтального наведения (ГН), механически соединенный с башней, электрический привод вертикального наведения (ЭП ВН), включающий электродвигатель с датчиком положения ротора, электрически связанный с усилителем мощности, и механический подъемник, соединенный с пушкой, блок датчиков, механически и электрически связанный с башней и пушкой танка, отличающийся тем, что в него введены блок обработки сигналов, включающий усилительно-преобразующее устройство и модуль автоматической компенсации, датчик скорости переносного движения, размещенный на башне танка, причем модуль автоматической компенсации содержит первый и второй сумматоры, дифференциатор, первое, второе, третье и четвертое множительные устройства, первый и второй интеграторы, при этом блок датчиков соединен с первым входом первого сумматора, а также первыми входами первого и второго множительных устройств, выход датчика скорости переносного движения соединен со вторыми входами первого и третьего множительных устройств, а также с дифференциатором, выход которого соединен со вторыми входами второго и четвертого множительных устройств, а выходы первого и второго множительных устройств соединены соответственно со входами интеграторов, выходы которых соединены с первыми входами третьего и четвертого множительных устройств, при этом выходы третьего и четвертого множительных устройств соединены соответственно с первым и вторым входами второго сумматора, выход которого соединен со вторым входом первого сумматора, при этом его выход соединен с входом усилительно-преобразующего устройства, выход которого соединен с электрическим приводом вертикального наведения.
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2284443C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 1993 |
|
RU2118783C1 |
| WO 2011070478 A1, 16.06.2011 | |||
| FR 2879730 A1, 23.06.2006 | |||
| Прибор для измерения кривизны буровых скважин | 1940 |
|
SU60907A1 |

