Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам танкового вооружения.
Известен стабилизатор танкового вооружения 2Э42-2, привод вертикального наведения (ВН) которого выполнен по схеме электрической принципиальной БС 1.370.009 Э3 и описан в БС1.370.009ТО, ТУ. Привод ВН данного стабилизатора принят за прототип.
(См. также книгу В.В.Корнеева, М.И.Кузнецова и др. «Основы автоматики и танковые автоматические системы», М.: Мин-во обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.)
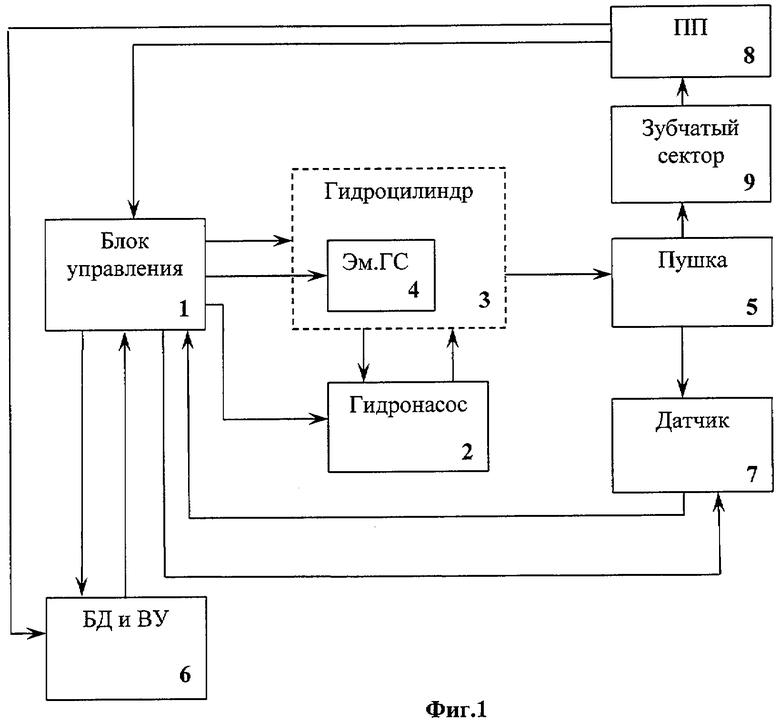
Привод ВН стабилизатора-прототипа представляет собой гидравлический привод, обеспечивающий наведение пушки на цель и ее стабилизацию по сигналам, выработанным блоком управления 1, одни сигналы с которого управляют включением гидронасоса 2, создающего рабочее давление на входе исполнительного гидроцилиндра 3, другие сигналы поступают на электромагниты гидростопорения 4 гидроцилиндра 3, перекрывающие полости гидроцилиндра, тем самым обеспечивая гидростопорение пушки на углах, заданных блоком управления 1, а другие сигналы поступают на управляющий вход исполнительного гидроцилиндра 3, обеспечивающего поворот пушки 5 в направлении, заданном блоком датчиков и вспомогательных устройств 6. Другие сигналы с блока датчиков и вспомогательных устройств 6 связаны с блоком управления 1 и представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор, так и в оборудование танка в целом. Для обеспечения качественных показателей работы привода ВН и обеспечения им приведения пушки на угол заряжания блок управления 1 обрабатывает дополнительно сигналы обратной связи с датчика абсолютной скорости 7, установленного на пушке 5, сигналы с прибора приведения 8, механически связанного с пушкой 5 через зубчатый сектор 9 и блоком датчиков и вспомогательных устройств 6. Причем конструкция гидроцилиндра 3 допускает возможность удара пушки 5 об жесткие упоры башни танка, выводя пушку из стабилизированного положения, при этом энергия удара гасится за счет периодического гидростопорения пушки на башню при ее отскоке от упоров по команде (сигналу), формируемому блоком управления 1 в том случае, если скорость пушки 5 превышает заданную датчиком абсолютной скорости 7, что приводит к увеличению времени нестабилизированного состояния пушки, особенно при движении танка по пересеченной местности.
Описанной конструкции стабилизатора присущи следующие недостатки:
- применение гидравлического привода ВН в стабилизаторе-прототипе не позволяет добиться высоких показателей по точности стабилизации и максимальной скорости отработки (не более 28%) при движении танка по пересеченной местности;
- рабочая жидкость гидропривода (масло) пожароопасна (гидропривод состоит из двух отдельных узлов, соединенных шлангами с рабочей жидкостью);
- гидравлический привод сложен в обслуживании, т.к. требует заправки и замены рабочей жидкости, выпуска воздуха из гидросистемы;
- отсутствие в стабилизаторе-прототипе датчика относительного положения пушки не дает возможности предупредить удар пушки об жесткие упоры башни при больших скоростях изменения тангажа корпуса танка, что значительно увеличивает время приведения пушки в стабилизированное положение и, как следствие, приводит к увеличению времени подготовки выстрела.
Целью предлагаемого изобретения является повышение точности стабилизации, уменьшение времени нестабилизированного состояния (положения), повышение максимальной скорости отработки, снижение пожароопасности, повышение удобства технического обслуживания и ремонта.
Указанная цель достигается тем, что в стабилизатор танкового вооружения, содержащий приводы вертикального и горизонтального наведения, пушку, прибор приведения, механически связанный с пушкой через зубчатый сектор, блок управления и соединенные с ним датчик абсолютной скорости пушки и блок датчиков и вспомогательных устройств, согласно изобретению введены усилитель мощности, блок управления, снабженный модулем обработки сигналов, а в прибор приведения встроен датчик положения пушки, при этом прибор приведения электрически связан с блоком датчиков и вспомогательных устройств и блоком управления, а датчик положения пушки электрически связан с блоком управления, привод вертикального наведения выполнен электрическим, включающим электроцилиндр, состоящий из электродвигателя с датчиком положения ротора, электрически связанного с усилителем мощности, и силовую винтовую обратимую передачу, которая механически связана с валом электродвигателя для обеспечения возможности поворота пушки, а вместе с ней через зубчатый сектор и вала прибора приведения с датчиком положения пушки в направлении, задаваемом блоком датчиков и вспомогательных устройств.
Сопоставительный анализ с прототипом показывает, что заявляемый стабилизатор отличается наличием новых элементов и их связей с компонентами стабилизатора: блок управления с модулем обработки сигналов, усилитель мощности, электроцилиндр с электродвигателем и датчиком положения ротора и силовой винтовой обратимой передачей, прибор приведения с встроенным датчиком положения пушки.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, их введение в указанной связи в систему стабилизации и наведения позволяет:
- повысить точность стабилизации в 1,5 раза;
- уменьшить время нестабилизированного состояния при движении танка по пересеченной местности в 1,3 раза;
- повысить максимальную скорость отработки привода ВН в 1,6 раза до 45°/с;
- уменьшить возможность возникновения пожара в боевом отделении за счет отсутствия рабочей жидкости (масла) в приводе ВН;
- повысить удобство технического обслуживания и ремонта за счет отсутствия работ, связанных с заменой рабочей жидкости и шлангов, а также возможность поузловой замены приборов, входящих в привод ВН.
На фиг.1 приведена структурная схема привода ВН стабилизатора-прототипа; на фиг.2 приведена структурная схема заявляемого стабилизатора.
Привод вертикального наведения заявляемого стабилизатора содержит блок управления 1 с модулем обработки МО 2, управляющий усилителем мощности 3, устанавливаемым на место крепления гидронасоса стабилизатора-прототипа и служащим для формирования питания и управления электроцилиндром 4.
Электроцилиндр 4, устанавливаемый на место крепления гидроцилиндра стабилизатора-прототипа, состоит в свою очередь из электродвигателя ЭД 5 с датчиком положения ротора ДПР 6, электрически связанным с усилителем мощности 3, причем ротор датчика положения ДПР 6 жестко закреплен на валу электродвигателя ЭД 5, а статор жестко связан с корпусом электродвигателя ЭД 5, и силовой винтовой обратимой передачи ВП 7, механически связанной с валом электродвигателя ЭД 5 и поворачивающей пушку 8, а вместе с ней через жестко связанный с пушкой 8 зубчатый сектор 9 вал прибора приведения ПП 10, механически связанной с датчиком положения ДП 11 пушки 8, в направлении, заданном блоком датчиков и вспомогательных устройств 12.
Как и в стабилизаторе-прототипе, блок датчиков и вспомогательных устройств 12 связан с блоком управления 1, который обрабатывает сигналы обратных связей с датчика абсолютной скорости 13 и прибора приведения ПП 10, а его модуль обработки МО 2 дополнительно обрабатывает сигналы обратной связи по скорости вращения вала и току электродвигателя ЭД 5, формируемые усилителем мощности 3, и сигнал датчика положения ДП 11 прибора приведения ПП 10, установленного взамен прибора приведения стабилизатора-прототипа.
Модуль обработки блока управления представляет собой контроллер, программное обеспечение которого реализует функции управления привода ВН.
Корректирующие устройства, схемы сравнения, схема вычисления относительной скорости, схема коммутации и сумматоры выполнены в виде подпрограмм, причем частота обработки полученных блоком управления данных и выдача им сигналов управления приводом ВН будет определяться заданной частотой циклов обработки сигналов контроллером.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию», пер. с англ.- М.: Мир, 1976).
Заявляемый стабилизатор танкового вооружения работает следующим образом.
Принцип действия привода вертикального наведения ВН основан на том, что этот привод представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в вертикальной плоскости, которое требуется придать пушке, является заданным значением регулируемого параметра для привода ВН.
При движении танка по пересеченной местности на пушку действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) пушки, электродвигателе привода ВН, силовой винтовой передаче, а также возмущения, обусловленные неуравновешенностью пушки относительно оси цапф.
Эти возмущения вызывают отклонение пушки от заданного блоком датчиков и вспомогательных устройств направления. Угол между заданным и действительным направлением в этом случае определяет ошибку стабилизации привода ВН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ВН стабилизатора, поворачивающим пушку в сторону уменьшения ошибки.
Усилитель мощности формирует на входах модуля обработки блока управления сигналы обратных связей по скорости вращения вала и току электродвигателя электроцилиндра, необходимые для повышения устойчивости и качества работы привода ВН.
Датчик положения прибора приведения вырабатывает сигнал относительного положения пушки и подает его на блок управления.
При обеспечении режима стабилизации модуль обработки блока управления постоянно контролирует положение пушки относительно упоров, а также вычисляет ее относительную скорость методом дифференцирования сигнала датчика положения прибора приведения. С помощью полученных таким образом данных определяют ширину зоны около жестких упоров башни, в которой происходит изменение закона управления, формируемого блоком управления стабилизатора на входах усилителя мощности электроцилиндра. При работе стабилизатора вне данной зоны привод ВН работает по алгоритму, описанному выше.
В случае поступления команд с других устройств блок управления формирует на входе модуля обработки соответствующий данному режиму сигнал для управления электроцилиндром, обеспечивая тем самым либо электростопорение пушки на заданном угле, либо ее стабилизацию.
Модуль обработки формирует на управляющем выходе блока управления сигнал для усилителя мощности, в свою очередь обеспечивающего электростопорение пушки электродвигателем электроцилиндра, что исключает возможность удара пушки об один из упоров со скоростью, превышающей заданную скорость, и снижает тем самьм время нестабилизированного положения.
Электростопорение пушки на заданном блоком датчиков и вспомогательных устройств и блоком управления угле осуществляется за счет переключения привода ВН с сигнала ошибки на сигнал датчика относительного положения прибора приведения. После снятия команды на электростопорение привод ВН переходит в режим стабилизации по сигналу ошибки.
В режиме стабилизации и стабилизированного наведения сигнал с блока датчиков и вспомогательных устройств 12, электрически связанный с блоком управления 1, пропорциональный угловому отклонению пушки 8 от стабилизированного положения, поступает в блок управления 1. В нем полученный сигнал ошибки преобразуется, обрабатывается корректирующими звеньями, усиливается, фильтруется и поступает на модуль обработки 2 блока управления, где коммутируется в зависимости от режима работы привода ВН и суммируется с сигналами обратных связей, формируемыми усилителем мощности 3 и датчиком 13.
Таким образом, выработанный блоком управления сигнал поступает на вход усилителя мощности 3, где преобразуется в сигналы для управления обмотками электродвигателя 5 в режиме ШИМ-модуляции, которые через силовую винтовую передачу 7 поворачивают пушку 8 в сторону уменьшения ошибки (рассогласования), тем самым удерживая направление пушки 8 на цель.
В режиме электростопорения пушки на башню модуль обработки 2 блока управления 1 по своим внутренним командам и командам с других устройств на электростопорение переключает привод ВН с сигнала ошибки на сигнал датчика положения 11 прибора приведения 10. Значение сигнала с датчика положения 11 формируется модулем обработки 2 как разность между текущим значением сигнала с датчика относительного положения 11 в отсутствие команды на электростопорение и его значением в момент поступления данной команды. После снятия команды на электростопорение модуль обработки переключает привод ВН на сигнал ошибки, переводя его в режим стабилизации.
Режим подтормаживания в зоне около жестких упоров башни реализован параллельно с режимом стабилизации привода ВН. При этом модуль обработки 2 блока управления 1 постоянно контролирует в режиме стабилизации привода ВН по сигналу с датчика положения 11 прибора приведения 10 положение пушки 8 относительно жестких упоров башни, а также одновременно вычисляет ее относительную скорость методом дифференцирования сигнала датчика положения 11. Полученные данные используются модулем обработки 2 для формирования ширины зоны около упоров, в которой происходит переключение с задачи стабилизации пушки по ВН на задачу ее подтормаживания. Это достигается за счет изменения закона управления, формируемого модулем обработки 2 блока управления 1 стабилизатора на входе усилителя мощности 3 электроцилиндром 4.
Приведенные технические преимущества, целесообразность и надежность стабилизатора, реализованного по заявляемой структурной схеме, подтверждены испытаниями макетного образца модернизированного стабилизатора 2Э42-2 на танке Т-72Б на территории ФГУП «38ЦНИИ МО РФ», г.Кубинка.
Замена гидропривода ВН на электропривод ВН может быть осуществлена без переделки других частей стабилизатора и мест крепления привода на объекте установки (танке) при его модернизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2012 |
|
RU2505775C1 |
| ПРИВОД ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ | 2013 |
|
RU2530438C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| ПРИВОД ГОРИЗОНТАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ | 2013 |
|
RU2540448C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2015 |
|
RU2610025C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам танкового вооружения. Технический результат - повышение точности стабилизации, уменьшение времени нестабилизированного состояния (положения), повышение максимальной скорости отработки, снижение пожароопасности, повышение удобства технического обслуживания и ремонта. Стабилизатор танкового вооружения содержит приводы вертикального и горизонтального наведения, пушку, прибор приведения, механически связанный с пушкой через зубчатый сектор, блок управления и соединенные с ним датчик абсолютной скорости пушки и блок датчиков и вспомогательных устройств. Согласно изобретению введен усилитель мощности, блок управления, снабженный модулем обработки сигналов, прибор приведения с встроенным датчиком положения пушки, при этом датчик положения пушки и сам прибор приведения электрически связаны с блоком управления, а привод вертикального наведения выполнен электрическим, включающим электроцилиндр, состоящий из электродвигателя с датчиком положения ротора, электрически связанного с усилителем мощности, и силовой винтовой обратимой передачи, которая механически связана с валом электродвигателя для обеспечения возможности поворота пушки, а вместе с ней через зубчатый сектор и вала прибора приведения с датчиком положения в направлении, задаваемом блоком датчиков и вспомогательных устройств. 2 ил.
Стабилизатор танкового вооружения, содержащий приводы вертикального и горизонтального наведений, пушку, прибор приведения, механически связанный с пушкой через зубчатый сектор, блок управления и соединенные с ним датчик абсолютной скорости пушки и блок датчиков и вспомогательных устройств, отличающийся тем, что в него введены усилитель мощности, электрически связанный с блоком управления, и прибор приведения с встроенным датчиком положения пушки, блок управления снабжен модулем обработки сигналов, выполненным с возможностью обработки сигналов обратных связей, формируемых усилителем мощности, датчиком абсолютной скорости и датчиком положения пушки прибора приведения, при этом прибор приведения электрически связан с блоком датчиков и вспомогательных устройств и блоком управления, а датчик положения пушки электрически связан с блоком управления, при этом привод вертикального наведения выполнен электрическим, включающим электроцилиндр, состоящий из электродвигателя с датчиком положения ротора, электрически связанного с усилителем мощности, и силовую винтовую обратимую передачу, которая механически связана с валом электродвигателя для обеспечения возможности поворота пушки, а вместе с ней через зубчатый сектор и вала прибора приведения с датчиком положения пушки в направлении, задаваемом блоком датчиков и вспомогательных устройств.
| Корнеев В.В., Кузнецов М.И | |||
| и др | |||
| Основы автоматики и танковые автоматические системы | |||
| - М.: Мин-во обороны, 1976, издание Академии бронетанковых войск имени маршала Р.Я.Малиновского | |||
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2284443C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 1993 |
|
RU2118783C1 |

