Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам вооружения (далее по тексту - СВ) боевых модулей (далее по тексту - БМ) машин типа танков, БМП, БТР и т.п., имеющих в своем составе стабилизатор вооружения, содержащий необходимый набор внешней и внутренней датчиковой аппаратуры, входящий в состав системы управления и стабилизации вооружения (далее по тексту - СУСВ).
Известен стабилизатор вооружения 2Э42 БС1.370.008 объекта 219РВ (танка Т-80БВ), выполненный по схеме электрической принципиальной БС1.370.008 Э3 и описанный в БС1.370.008 ТО, ТУ.
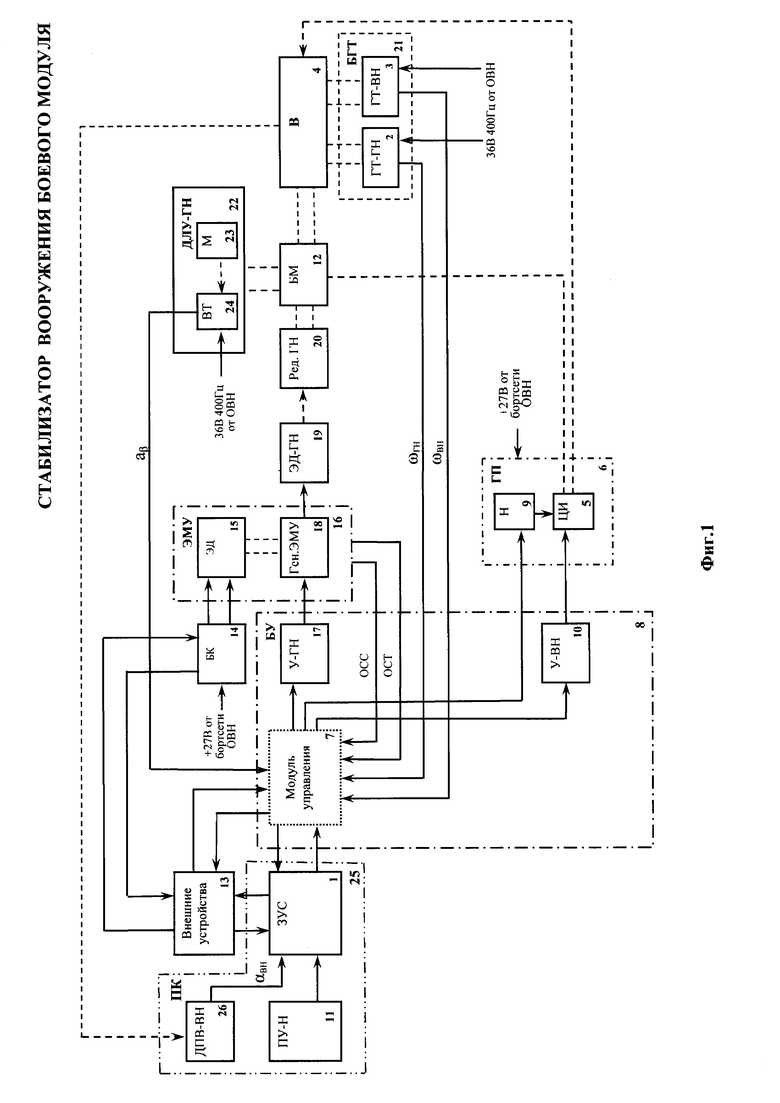
Структурная схема стабилизатора вооружения изображена на фиг. 1. Данный стабилизатор вооружения принят за прототип.
(См. (1) В.В. Корнеев, М.И. Кузнецов и др. «Основы автоматики и танковые автоматические системы», М., Министерство обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.;
(2) Министерство обороны СССР. Главное бронетанковое управление. Объект 219РВ. Техническое описание и инструкция по эксплуатации, Книга вторая, М., Военное издательство, 1986 г., 840 с., подраздел 2.7, стр. 175).
Стабилизатор вооружения-прототипа в основном состоит из двух приводов:
- привода вертикального наведения (далее по тексту - ВН) и стабилизации;
- привода горизонтального наведения (далее по тексту - ГН) и стабилизации,
и составных частей, обеспечивающих их совместную работу, в том числе и в составе системы управления огнем объекта 219РВ (танка Т-80БВ).
Привод ГН стабилизатора вооружения построен на базе электромеханического (электромашинного) привода, а привод ВН - на базе электрогидравлического привода.
Привода ГН и ВН стабилизатора, принятого за прототип, представляют собой автономные приводы, обеспечивающие наведение и стабилизацию основного вооружения танка в плоскостях ГН и ВН по сигналам, поступающим от задающего устройства стабилизации (ЗУС) 1 и датчиков абсолютной угловой скорости гироскопических (гиротахометров) (ГТ-ГН) 2 и (ГТ-ВН) 3. Время готовности стабилизатора вооружения к работе, при условии готовности задающего устройства стабилизации (ЗУС) 1, составляет 2 мин после его включения и определяется временем выхода гироскопов датчиков абсолютной угловой скорости гироскопических (гиротахометров) (ГТ-ГН) 2 и (ГТ-ВН) 3 на рабочую скорость вращения (≈ 20000 об/мин).
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Рассмотрим работу каждого из приводов ВН и ГН в отдельности.
Режим стабилизации по ВН - режим стабилизации пушки по ВН осуществляется относительно сигнала датчика положения зеркала по ВН (ЗУС) 1, имеющего независимую стабилизацию зеркала в плоскости ВН, что обеспечивается гиростабилизатором (ЗУС) 1.
При движении танка по пересеченной местности на установленное вооружение (В) 4 (пушку) действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) вооружения (В) 4, трения в исполнительном цилиндре (ЦИ) 5 гидропривода ВН (ГП) 6, а также возмущения, обусловленные неуравновешенностью установленного вооружения (В) 4 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 4 от заданного сигналом датчика положения зеркала по ВН (ЗУС) 1 направления. Угол между заданным и действительным направлением вооружения (В) 4 в вертикальной плоскости, в этом случае, определяет ошибку стабилизации гидропривода ВН (ГП) 6. Сигнал, пропорциональный ошибке стабилизации, отрабатывается гидроприводом ВН (ГП) 6 стабилизатора вооружения, поворачивающим вооружение (В) 4 в сторону уменьшения ошибки по ВН.
Полученная, таким образом, ошибка стабилизации гидропривода ВН (ГП) 6 обрабатывается аналоговым модулем управления 7 блока управления (БУ) 8 стабилизатора вооружения, одни сигналы с которого управляют включением гидронасоса (Н) 9 гидропривода ВН (ГП) 6, создающего рабочее давление на входе механизма управления исполнительного гидроцилиндра (ЦИ) 5 гидропривода ВН (ГП) 6, а другие сигналы через усилитель (У-ВН) 10 поступают на управляющий вход механизма управления исполнительного гидроцилиндра (ЦИ) 5 гидропривода ВН (ГП) 6, создающего разность давлений в полостях исполнительного гидроцилиндра (ЦИ) 5, тем самым обеспечивая поворот вооружения (В) 4 в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ВН (ЗУС) 1 и истинным положением вооружения (В) 4 в плоскости ВН.
Для повышения устойчивости привода ВН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора вооружения введена обратная связь по абсолютной угловой скорости вооружения (В) 4 в плоскости ВН (ωВН) с гиротахометра (ГТ-ВН) 3, обрабатываемая аналоговым модулем управления 7 блока управления (БУ) 8.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 4 по ВН осуществляется также по сигналу с датчика положения зеркала по ВН (ЗУС) 1. При обнаружении цели наводчик пультом управления (ПУ-Н) 11 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС) 1 на цель в плоскости ВН. Сигнал с датчика положения зеркала по ВН (ЗУС) 1, пропорциональный ошибке стабилизации по ВН, поступает на вход блока управления (БУ) 8, где происходит его преобразование, как описано выше. Гидропривод ВН (ГП) 6 поворачивает вооружение (В) 4 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Режим стабилизации по ГН - режим стабилизация боевого модуля (БМ) 12, вооружения (В) 4 по ГН осуществляется относительно сигнала датчика положения зеркала по ГН (ЗУС) 1, имеющего независимую стабилизацию зеркала в плоскости ГН, что обеспечивается гиростабилизатором (ЗУС) 1.
При движении танка по пересеченной местности на (башню) боевой модуль (БМ) 12 (пушку) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне боевого модуля (БМ) 12, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 12 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 12 (пушки) от заданного сигналом датчика положения зеркала по ГН (ЗУС) 1 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 12 (пушки) в горизонтальной плоскости, в этом случае, определяет ошибку стабилизации привода ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН стабилизатора вооружения, поворачивающим боевой модуль (БМ) 12 (пушку) в сторону уменьшения ошибки.
Полученная, таким образом, ошибка стабилизации привода ГН обрабатывается аналоговым модулем управления 7 блока управления (БУ) 8 стабилизатора вооружения, одни сигналы с которого через внешние устройства 13 управляют включением блока коммутации (БК) 14 привода ГН, запускающего приводной электродвигатель (ЭД) 15 электромашинного усилителя (ЭМУ) 16, а другие сигналы через усилитель (У-ГН) 17 блока управления (БУ) 8 поступают на обмотки управления генератора (Ген. ЭМУ) 18, формируя в них разность токов, в соответствии с величиной и знаком которых (Ген. ЭМУ) 18 вырабатывает напряжение, под действием которого исполнительный электродвигатель (ЭД-ГН) 19 через редуктор (Ред. ГН) 20 поворачивает боевой модуль (БМ) 12 (пушку) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ГН (ЗУС) 1 и истинным положениями боевого модуля (БМ) 12 (пушки) в плоскости ГН.
Для повышения устойчивости привода ГН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ГН стабилизатора введены обратные связи по току (ОСТ) (ЭД-ГН) 19, по скорости (ОСС) (ЭД-ГН) 19, вырабатываемые (ЭМУ) 16 и по абсолютной угловой скорости боевого модуля (БМ) 12 (пушки) в плоскости ΓΗ (ωГН) с гиротахометра (ГТ-ГН) 2, обрабатываемые аналоговым модулем управления 7 (БУ) 8.
Датчик абсолютной угловой скорости в плоскости ГН гиротахометр (ГТ-ГН) 2 совместно с датчиком абсолютной угловой скорости в плоскости ВН гиротахометром (ГТ-ВН) 1 установлены в единый корпус блока гиротахометров (БГТ) 21, расположенного (механически закрепленного) на казенной части вооружения (В) 4 (пушки).
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 12 (пушки) по ГН осуществляется также по сигналу с датчика положения зеркала по ГН (ЗУС) 1. При обнаружении цели наводчик пультом управления (ПУ-Н) 11 наводит стабилизированную в двух плоскостях (ВН и ГН) линию визирования (прицельную марку) (ЗУС) 1 на цель в плоскости ГН. Сигнал с датчика положения зеркала по ГН (ЗУС) 1, пропорциональный ошибке стабилизации по ГН, поступает на вход блока управления (БУ) 8, где происходит его преобразование, как описано выше. Исполнительный электродвигатель (ЭД-ГН) 19 через редуктор (Ред. ГН) 20 поворачивает (башню) боевой модуль (БМ) 12 (пушку) танка в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Другие сигналы с внешних устройств 13, связанные с (ЗУС) 1 и через него с (ПУ-Н) 11, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор вооружения, так и в оборудование танка в целом.
Для компенсации ошибки по ГН, вызванной моментными возмущениями, возникающими от неуравновешенности боевого модуля (БМ) 12 (пушки) при движении шасси танка по пересеченной местности, на боевом модуле (БМ) 12 установлен одноплоскостной датчик линейных ускорений ГН (ДЛУ-ГН) 22. В данном датчике линейных ускорений ГН (ДЛУ-ГН) 22 используется чувствительный элемент в виде маятника (М) 23, закрепленного с одной стороны через торсионную пружину на корпусе (ДЛУ-ГН) 22, а с другой стороны в роторе вращающегося трансформатора (ВТ) 24. Сигнал (aβ) с вращающегося трансформатора (ВТ) 24 датчика линейных ускорений ГН (ДЛУ-ГН) 22 представляет собой сигнал, пропорциональный углу крена оси цапф вооружения (В) 4 (пушки) и линейному ускорению боевого модуля (БМ) 12 (башни) в направлении, перпендикулярном его продольно-вертикальной плоскости, проходящей через ось канала вооружения (пушки).
Полученный таким образом сигнал (аβ) от датчика линейных ускорений ГН (ДЛУ-ГН) 22 обрабатывается аналоговым модулем управления 7 блока управления (БУ) 8 стабилизатора вооружения и служит для уменьшения ошибки по ГН от поперечных и креновых возмущений шасси танка, воздействующих при его движении на боевой модуль (БМ) 12 (пушку) в горизонтальной плоскости.
Питание блока гиротахометров (БГТ) 21 и датчика линейных ускорений ГН (ДЛУ-ГН) 22 стабилизатора вооружения осуществляется переменным напряжением от вторичной сети танка - 36 В 400 Гц.
В состав прицельного комплекса (ПК) 25 входит датчик положения вооружения по ВН (ДПВ-ВН) 26, механически связанный с вооружением (В) 4 (пушкой) и электрически с (ЗУС) 1, необходимый для формирования сигнала относительного углового положения (αвн) вооружения (В) 4 (пушки). Алгебраическая разность между датчиком положения зеркала по ВН (ЗУС) 1 в плоскости ВН и датчиком положения вооружения по ВН (ДПВ-ВН) 26 и определяет величину ошибки привода ВН.
Недостатками вышеуказанной конструкции стабилизатора вооружения-прототипа являются:
1. Использование аналоговых контуров коррекции и управления исполнительными приводами ГН и ВН, не позволяющих применять адаптивные и оптимальные алгоритмы управления стабилизатором вооружения, гибко (без значительной переделки модуля управления СВ) менять его параметры при изменении механических параметров танка в процессе его эксплуатации.
2. Недостаточная точность стабилизации вооружения, обусловленная недостаточной точностью диагностики и настройки, отсутствием возможности включения в контуры управления приводами ВН и ГН сигналов с датчиковой аппаратуры танка (внешних устройств) в виде дополнительных обратных связей.
3. Установка стабилизатора на другие танки требует существенной его доработки.
4. Отсутствие автономного (независимого) режима стабилизации вооружения танка в случае отказа его основного прицельного(ых) комплекса(ов).
5. Необходимость использования напряжения 36 В 400 Гц для питания блока гиротахометров и датчика линейных ускорений стабилизатора вооружения, что в случае с блоком гиротахометров напрямую влияет на время готовности стабилизатора вооружения к работе, а в случае аварийного пропадания 36 В 400 Гц приводит и к полному отказу стабилизатора вооружения.
Техническими задачами заявляемого изобретения являются:
- повышение надежности стабилизатора вооружения;
- повышение эксплутационных показателей стабилизатора вооружения;
- повышение эксплутационной интероперабельности стабилизатора вооружения;
- повышение точности стабилизации по ВН и ГН стабилизатора вооружения;
- расширение функциональных возможностей стабилизатора вооружения;
- уменьшение времени готовности стабилизатора вооружения;
- увеличение живучести стабилизатора вооружения, а с ним и объекта военного назначения (далее по тексту - ОВН);
- исключение использования переменного напряжения 36 В 400 Гц для питания блока гиротахометров и датчика линейных ускорений стабилизатора вооружения.
Для достижения указанного технического результата в известный стабилизатор вооружения боевого модуля, содержащий боевой модуль (башню) с установленным на нем вооружением (пушкой), гидропривод ВН, электрически связанный с бортсетью ОВН, цилиндр исполнительный гидропривода ВН, механически связанный с вооружением (пушкой) и боевым модулем (башней) и гидравлически с насосом гидропривода ВН, редуктор ГН, механически связанный с боевым модулем (башней), электродвигатель ГН, механически связанный с редуктором ГН и электрически связанный с генератором ЭМУ, прицельный комплекс с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, с пультом управления наводчика, электрически связанным с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ΓΗ и ВН и с датчиком положения вооружения (пушки) по ВН, механически связанным с вооружением (пушкой) и электрически - с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок коммутации привода ГН, электрически связанный с бортсетью ОВН, внешними устройствами и электродвигателем ЭМУ, механически связанного с генератором ЭМУ, блок управления, модуль управления которого электрически связан с внешними устройствами, усилителями ГН и ВН блока управления, приводным двигателем насоса гидропривода ВН и с генератором ЭМУ через обратные связи по скорости и по току электродвигателя ГН, усилитель ГН блока управления, электрически связанный с генератором ЭМУ, усилитель ВН блока управления, электрически связанный с входом цилиндра исполнительного гидропривода ВН, отличающийся тем, что в него согласно изобретению дополнительно введены:
- датчик положения боевого модуля по ГН;
- блок датчиков абсолютных угловых скоростей, с механически закрепленными в нем датчиком абсолютной угловой скорости по ГН и датчиком абсолютной угловой скорости по ВН, расположенными по двум соответствующим ортогональным осям;
- датчик линейных ускорений двухплоскостной, с механически закрепленными в нем акселерометром ГН и акселерометром ВН, расположенными по двум соответствующим ортогональным осям;
- видеосмотровое устройство;
- панель управления;
- прицел-дублер с зависимой линией стабилизации по ВН и ГН,
кроме того, в блок управления дополнительно введены:
- первое ключевое устройство;
- второе ключевое устройство;
- интегратор привода ГН;
- интегратор привода ВН;
- модуль настройки и диагностики стабилизатора,
при этом датчик положения боевого модуля по ГН механически связан с боевым модулем (башней) в плоскости ГН и электрически связан с модулем управления блока управления,
блок датчиков абсолютных угловых скоростей механически, в соответствии с ориентацией собственных ортогональных осей чувствительности по ВН и ГН, связан с вооружением (пушкой) в плоскостях ГН и ВН и электрически связан с модулем управления блока управления,
датчик линейных ускорений механически, в соответствии с ориентацией собственных ортогональных осей чувствительности по ВН и ГН, связан с боевым модулем (башней) в плоскостях ГН и ВН и электрически связан с модулем управления блока управления,
прицел-дублер с зависимой линией стабилизации по ВН и ГН механически связан с вооружением (пушкой) и боевым модулем (башней) в плоскостях ВН и ГН,
а видеосмотровое устройство, панель управления и модуль настройки и диагностики стабилизатора электрически связаны с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН,
причем указанные пульт управления наводчика, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН и модуль настройки и диагностики стабилизатора электрически связаны соответственно с первым входом второго ключевого устройства, с первым входом первого ключевого устройства и модулем управления блока управления,
при этом, с одной стороны, выход интегратора по ГН блока управления и выходы датчиков положения независимо стабилизированного в пространстве инерциального объекта по ГН задающего устройства стабилизации связаны через цифровые каналы обмена соответственно со вторым и первым входами второго ключевого устройства, соединенного с модулем управления, второй и первый входы интегратора по ГН связаны соответственно с выходом датчика абсолютной угловой скорости по ГН блока датчиков и первым выходом первого ключевого устройства, связанного электрически с выходом пульта управления наводчика по ГН и модулем управления, электрически связанным, как указано выше, с генератором ЭМУ через усилитель ГН блока управления и вращающим вал электродвигателя ГН, поворачивающим через редуктор ГН боевой модуль (башню) с вооружением (пушкой), а с ней и оптическую линию визирования по ГН прицела-дублера с зависимой линией стабилизации по ВН и ГН в плоскости ГН,
с другой стороны, выход интегратора по ВН блока управления и выходы датчиков положения независимо стабилизированного в пространстве инерциального объекта по ВН задающего устройства стабилизации связаны через цифровые каналы обмена соответственно с третьим и первым входами второго ключевого устройства, соединенного с модулем управления, первый и второй входы интегратора по ВН связаны соответственно с выходом датчика абсолютной угловой скорости по ВН блока датчиков и вторым выходом первого ключевого устройства, связанного электрически с выходом пульта управления наводчика по ВН и модулем управления, электрически связанным, как указано выше, с цилиндром исполнительным привода ВН через усилитель ВН блока управления и управляющим направлением движения штока по ВН, поворачивающего вооружение (пушку) в плоскости ВН, а с ней и оптическую линию визирования по ВН прицела-дублера с зависимой линией стабилизации по ВН и ГН в плоскости ВН.
Сопоставительный анализ с прототипом показывает, что заявляемый стабилизатор вооружения боевого модуля отличается наличием новых элементов, а именно:
- датчика положения боевого модуля по ГН;
- прицела-дублера с зависимой линией стабилизации по ВН и ГН;
- первого ключевого устройства;
- второго ключевого устройства;
- интегратора привода ГН;
- интегратора привода ВН;
- модуля настройки и диагностики стабилизатора;
- блока датчиков абсолютных угловых скоростей, с механически закрепленными в нем датчиком абсолютной угловой скорости по ГН и датчиком абсолютной угловой скорости по ВН, расположенными по двум соответствующим ортогональным осям;
- датчика линейных ускорений двухплоскостного, с механически закрепленными в нем акселерометром ГН и акселерометром ВН, расположенными по двум соответствующим ортогональным осям;
- видеосмотрового устройства;
- панели управления,
и их связями с другими элементами стабилизатора вооружения и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в стабилизатор вооружения позволяет:
- повысить надежность стабилизатора вооружения, за счет использования в конструкции блока датчиков твердотельных датчиков абсолютной угловой скорости, в конструкции которых отсутствуют быстровращающиеся элементы (гироскопы), а также широкого применения интегральной цифровой элементной базы, резко сокращающей номенклатуру дискретных аналоговых элементов;
- повысить эксплутационные показатели стабилизатора вооружения, за счет введения в стабилизатор цифровых контуров управления и коррекции приводами ГН и ВН, что позволяет применить адаптивные и оптимальные алгоритмы управления стабилизатором вооружения, гибко менять его параметры при изменении механических параметров танка в процессе его эксплуатации;
- повысить эксплутационную интероперабельность стабилизатора вооружения, за счет введения в его структуру цифровых информационных каналов обмена с внешними устройствами ОВН, что позволяет резко повысить эксплутационные характеристики стабилизатора вооружения и возможность установки на другие ОВН без существенной доработки. Повышение эксплутационной интероперабельности также достигается введением в структуру стабилизатора вооружения дополнительных устройств (модулей), позволяющих проводить настройку и диагностику стабилизатора, как при помощи внешних устройств диагностики и настройки, подключаемых к контрольному разъему блока управления стабилизатора вооружения, так и при помощи встроенных средств диагностики и настройки ОВН через панель управления и видеосмотровое устройство прицельного комплекса;
- повысить точность стабилизации по ВН и ГН, за счет введения в контуры управления приводами ВН и ГН стабилизатора вооружения дополнительных сигналов обратных связей с датчиковой аппаратуры стабилизатора вооружения и ОВН, получаемых по цифровым информационным каналам обмена, что позволяет поднять устойчивость и добротность контуров управления приводами ВН и ГН. Применение датчика линейных ускорений двухплоскостного и блока датчиков абсолютных угловых скоростей, не имеющих механических чувствительных элементов, закрепленных на торсионных пружинах, позволяет повысить полосу пропускания по измеряемым координатам и, как следствие, позволяет алгоритмически более точно компенсировать внешние возмущающие воздействия и за счет этого повысить точность стабилизации не менее чем на (15-20)%;
- расширить функциональные возможности стабилизатора вооружения, за счет введения в его структуру дополнительных устройств: датчика положения боевого модуля по ГН, блока датчиков абсолютных угловых скоростей, датчика линейных ускорений двухплоскостного, за счет более высоких технических характеристик примененных устройств по сравнению с прототипом;
- уменьшить время готовности стабилизатора вооружения, за счет применения блока датчиков абсолютных угловых скоростей, использующего твердотельные датчики абсолютной угловой скорости по ГН и ВН, имеющих время готовности не более 0,1 с, и таким образом время готовности стабилизатора вооружения начинает определяется только временем готовности блока управления стабилизатора вооружения, которое составляет не более 10 с;
- увеличить живучесть ОВН, за счет введения в стабилизатор вооружения датчика положения боевого модуля по ГН, первого ключевого устройства, интегратора привода ГН, интегратора привода ВН, второго ключевого устройства, прицела-дублера с зависимой линией стабилизации по ВН и ГН, позволяющих обеспечить его автономную работу в случае отказа основного прицельного комплекса ОВН;
- исключить используемое напряжение 36 В 400 Гц для питания приборов стабилизатора вооружения, за счет использования датчика положения башни по ГН, блока датчиков и датчика линейных ускорений двухплоскостного, не требующих данного напряжения для работы, а использующих для питания +27 бортсети ОВН.
Таким образом, предлагаемое изобретение позволяет за счет введения в структуру СВ новых приборов и узлов, построенных на цифровой платформе, значительно расширить совместно с системой управления огнем возможности боевого применения ОВН, поднять его боевую мощь, надежность, живучесть, улучшить его технические и эксплутационные характеристики, решить вопросы по настройке и оперативной диагностике СВ в составе ОВН, что очень важно при работе экипажа в реальных боевых условиях.
Устройство и работа заявляемого изобретения поясняются графическими материалами.
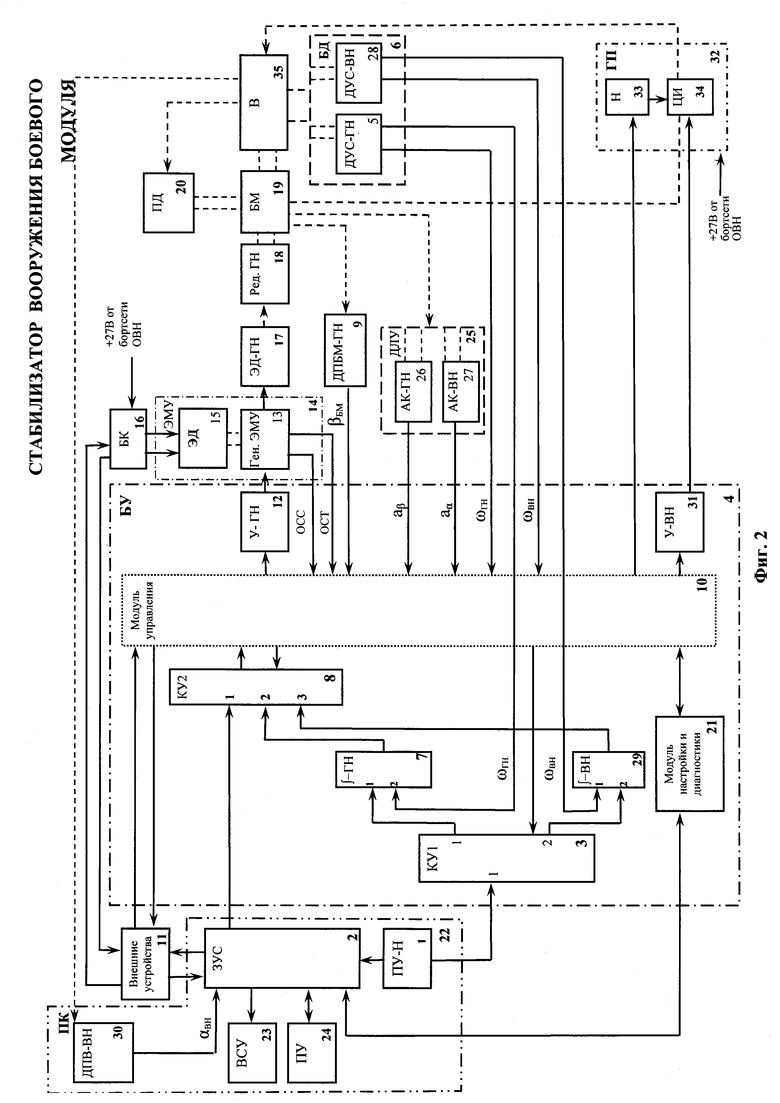
На фиг. 1 приведена структурная схема стабилизатора-прототипа 2Э42 танка Т-80; на фиг. 2 приведена заявляемая структурная схема стабилизатора вооружения боевого модуля.
Сокращения, принятые в тексте, на фиг. 1 и на фиг. 2:
АК-ВН - акселерометр ВН датчика линейных ускорений;
АК-ГН - акселерометр ГН датчика линейных ускорений;
БД - блок датчиков;
БК - блок коммутации привода ГН;
БМ - боевой модуль (башня);
БУ - блок управления;
В - вооружение (пушка);
ВСУ - видеосмотровое устройство;
ГП - гидропривод ВН;
ДЛУ - датчик линейных ускорений;
ДПБМ-ГН - датчик положения боевого модуля (башни) по ГН;
ДПВ-ВН - датчик положения вооружения (пушки) по ВН;
ДУС-ГН - датчик абсолютной угловой скорости по ГН блока датчиков;
ДУС-ВН - датчик абсолютной угловой скорости по ВН блока датчиков;
ЗУС - задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН;
КУ1 - первое ключевое устройство;
КУ2 - второе ключевое устройство;
H - насос гидропривода ВН;
ОВН - объект военного назначения;
ОСС - обратная связь по скорости;
ОСТ - обратная связь по току;
ПД - прицел-дублер с зависимой линией визирования по ВН и ГН для автономного режима стабилизации;
ПК - прицельный комплекс;
ПУ - панель управления;
ПУ-Н - пульт управления наводчика;
Ред. ГН - редуктор привода ГН;
У-ВН - усилитель ВН;
У-ГН - усилитель ГН;
∫-ΓΗ - интегратор привода ГН автономного режима стабилизации;
∫-BH - интегратор привода ВН автономного режима стабилизации;
ЦИ - цилиндр исполнительный привода ВН;
ЭД-ГН - электродвигатель привода ГН;
ЭМУ - электромашинный усилитель;
ЭД - электродвигатель ЭМУ;
Ген. ЭМУ - генератор ЭМУ;
аα - сигнал с акселерометра (АК-ВН);
аβ - сигнал с акселерометра (АК-ГН);
αвн - сигнал с датчика положения вооружения по ВН;
βГН - сигнал с датчика положения боевого модуля по ГН;
ωВН - сигнал с выхода датчика абсолютной угловой скорости по ВН;
ωГН - сигнал с выхода датчика абсолютной угловой скорости по ГН.
Заявляемый стабилизатор вооружения представляет собой автономно работающие привода наведения и стабилизации башни и пушки в плоскостях ГН и ВН.
Датчики положения (угла) независимо стабилизированного инерциального объекта по ГН и ВН задающего устройства стабилизации, датчики абсолютной угловой скорости ГН и ВН, датчики положения боевого модуля и вооружения по ГН и ВН, ЭМУ горизонтального привода боевого модуля формируют на входах блока управления сигналы ошибок по ГН и ВН, сигналы по абсолютной угловой скорости вооружения по ГН и ВН, сигналы по относительному положению боевого модуля и вооружения, сигналы обратных связей по скорости вращения вала и току исполнительного электродвигателя привода ГН.
Привод ГН содержит пульт управления наводчика (ПУ-Н) 1 с резисторами наведения в плоскости ГН, задающее устройство стабилизации (ЗУС) 2 с датчиками положения (угла) независимо стабилизированного зеркала прицела по ГН, электрически связанные соответственно с пультом управления наводчика (ПУ-Н) 1 по ГН, выход с резистора (ПУ-Н) 1 по ГН связан соответственно с первым входом первого ключевого устройства (КУ1) 3 блока управления (БУ) 4.
Выход по ГН первого ключевого устройства (КУ1) 3 и сигнал (ωГН) с выхода датчика абсолютной угловой скорости (ДУС-ГН) 5 блока датчиков (БД) 6 боевого модуля (вооружения) (пушки) по ГН связаны соответственно с первым и вторым входами интегратора по (∫-ГН) 7, связанного со вторым входом второго ключевого устройства (КУ2) 8. Интегратор (∫-TH) 7 служит для преобразования сигнала, полученного суммированием с заданными коэффициентами сигнала пульта управления наводчика (ПУ-Н) 1 с (ωГН) датчика абсолютной угловой скорости (ДУС-ГН) 5, в ошибку (угловое абсолютное положение) привода ГН, используемую в режиме автономной стабилизации башни (пушки) по ГН в случае выхода из строя (ЗУС) 2 задающего устройства стабилизации с датчиками положения (угла) независимо стабилизированного зеркала прицела по ГН.
Сигнал ошибки привода ГН с (ЗУС) 2 задающего устройства стабилизации с датчиками положения (угла) независимо стабилизированного зеркала прицела по ГН поступает через цифровой канал обмена соответственно на первый вход второго ключевого устройства (КУ2) 8 блока управления (БУ) 4.
Сигнал (βГН) с датчика положения боевого модуля по ГН (ДПБМ-ГН) 9 поступает на вход модуля управления 10 блока управления (БУ) 4, где суммируется с заданным коэффициентом с сигналом ошибки привода ГН, полученной от одного из двух независимых задающих устройств стабилизации по ГН [от (ЗУС) 2 либо от интегратора по (∫-TH) 7] и коммутируемой на выход управления по ГН второго ключевого устройства (КУ2) 8 по командам от модуля управления 10 в зависимости от установленного внешними устройствами 11 режима работы ОВН.
Полученный таким образом сигнал управления для привода ГН через усилитель ГН (У-ГН) 12 блока управления (БУ) 4 поступает на вход генератора ЭМУ (Ген. ЭМУ) 13 (ЭМУ) 14 привода ГН, механически связанного с электродвигателем ЭМУ (ЭД) 15, включаемого по командам от блока коммутации (БК) 16, работающего по сигналам и командам внешних устройств 11 ОВН. Электрический сигнал управления с выхода генератора ЭМУ (Ген. ЭМУ) 13 (ЭМУ) 14 привода ГН вращает выходной вал, электрически связанного с ним, исполнительного электродвигателя (ЭД-ГН) 17, вращающего через редуктор (Ред. ГН) 18 боевой модуль (БМ) 19 (башню) (пушку) и жестко связанный с ней прицел-дублер (ПД) 20 с зависимой линией визирования по ВН и ГН режима автономной стабилизации боевого модуля (башни) (пушки).
Для настройки привода ГН и его диагностики в составе ОВН в блок управления (БУ) 4 введен модуль настройки и диагностики 21, работающий совместно с модулем управления 10 и связанный через цифровой канал обмена с (ЗУС) 2 прицельного комплекса (ПК) 22 с видеосмотровым устройством (ВСУ) 23 и панелью управления (ПУ) 24.
Для компенсации ошибки по ГН, вызванной моментными возмущениями, возникающими от неуравновешенности боевого модуля (БМ) 19 (пушки) при движении шасси танка по пересеченной местности на боевом модуле (БМ) 19, установлен датчик линейных ускорений (ДЛУ) 25, использующий в качестве чувствительных элементов акселерометры (АК-ГН) 26 и (АК-ВН) 27, расположенные по двум соответствующим ортогональным осям и закрепленные механически внутри корпуса (ДЛУ) 25.
Акселерометры (АК-ГН) 26 и (АК-ВН) 27, используемые в двухплоскостном ДЛУ, имеют высокую полосу пропускания и обеспечивают отсутствие механического резонанса в рабочей полосе пропускания приводов ВН и ГН по сравнению с механическим одноплоскостным ДЛУ маятникового типа. Это позволяет алгоритмически более точно компенсировать внешние возмущающие воздействия, а значит, и поднять точность стабилизации приводов по ГН и ВН стабилизатора вооружения.
Сигналы (аβ) и (аα) с акселерометров (АК-ГН) 26 и (АК-ВН) 27 датчика линейных ускорений (ДЛУ) 25 по цифровому каналу поступают в модуль управления 10 блока управления (БУ) 4 стабилизатора вооружения и служат соответственно для уменьшения ошибок по ГН и ВН за счет их использования в алгоритмах управления каналами ГН и ВН стабилизатора вооружения в качестве компенсационных сигналов по возмущению по двум соответствующим ортогональным осям, при движении шасси ОВН (танка) по пересеченной местности.
Блоки, используемые в приводе ГН, такие как пульт управления наводчика (ПУ-Н) 1, задающее устройство стабилизации (ЗУС) 2, видеосмотровое устройство (ВСУ) 23, панель управления (ПУ) 24, первое ключевое устройство (КУ1) 3, второе ключевое устройство (КУ2) 8, модуль управления 10, модуль настройки и диагностики 21, блока управления (БУ) 4, работают совместно и с приводом ВН.
Привод ВН содержит пульт управления наводчика (ПУ-Н) 1 с резисторами наведения в плоскости ВН, (ЗУС) 2 задающее устройство стабилизации с датчиками положения (угла) независимо стабилизированного зеркала прицела по ВН, электрически связанное с (ПУ-Н) 1 пультом управления наводчика по ВН, выход с резистора по ВН которого также связан с первым входом первого ключевого устройства (КУ1) 3 блока управления (БУ) 4.
Выход по ВН первого ключевого устройства (КУ1) 3 и сигнал (ωвн) с выхода датчика абсолютной угловой скорости (ДУС-ВН) 28 блока датчиков (БД) 6 вооружения (пушки) по ВН связаны соответственно со вторым и первым входами интегратора по (∫-BH) 29, связанного с третьим входом второго ключевого устройства (КУ2) 8. Интегратор (∫-BH) 29 служит для преобразования сигнала, полученного суммированием с заданными коэффициентами сигнала (ПУ-Н) 1 пульта управления наводчика с (ωВН) датчика абсолютной угловой скорости (ДУС-ВН) 28, в ошибку (угловое абсолютное положение) привода ВН, используемую в режиме автономной стабилизации пушки по ВН в случае выхода из строя (ЗУС) 2 задающего устройства стабилизации с датчиками положения (угла) независимо стабилизированного зеркала прицела по ВН.
Сигналы ошибок привода ВН с (ЗУС) 2 задающего устройства стабилизации с датчиками положения (угла) независимо стабилизированного зеркала прицела по ВН поступают через цифровые каналы обмена соответственно на первый вход второго ключевого устройства (КУ2) 8 блока управления (БУ) 4.
Сигнал (αвн) с датчика положения вооружения по ВН (ДПВ-ВН) 30 через задающее устройство стабилизации (ЗУС) 2 поступает на вход модуля управления 10 блока управления (БУ) 4, где суммируется с заданным коэффициентом с сигналом ошибки привода ВН, полученным от одного из двух независимых задающих устройств стабилизации по ВН [от (ЗУС) 2 либо от интегратора по (∫-BH) 29] и коммутируемым на выход управления по ВН второго ключевого устройства (КУ2) 8 по командам от модуля управления 10 в зависимости от установленного внешними устройствами 11 режима работы ОВН.
Полученный таким образом сигнал управления для привода ВН через усилитель ВН (У-ВН) 31 блока управления (БУ) 4 поступает на вход гидропривода ВН (ГП) 32, гидронасос (Н) 33 которого, электрически связанный с модулем управления 10, создает поток рабочей жидкости на входе механизма управления исполнительного гидроцилиндра (ЦИ) 34, распределяемого его механизмом управления в зависимости от сигнала управления на входе гидропривода ВН (ГП) 32, меняя, тем самым, направление движения штока по ВН исполнительного гидроцилиндра (ЦИ) 34, поворачивающего вооружение (В) 35 (пушку) в плоскости ВН, а с ней и оптическую линию визирования прицела-дублера (ПД) 20 с зависимой линией стабилизации по ВН и ГН в плоскости ВН.
Для настройки привода ВН и его диагностики в составе ОВН в блок управления (БУ) 4 введен модуль настройки и диагностики 21, работающий совместно с модулем управления 10 и связанный через цифровой канал обмена с (ЗУС) 2 прицельного комплекса (ПК) 22 с видеосмотровым устройством (ВСУ) 23 и панелью управления (ПУ) 24.
Блоки, используемые в приводе ВН, такие как пульт управления наводчика (ПУ-Н) 1, задающее устройство стабилизации (ЗУС) 2, видеосмотровое устройство (ВСУ) 23, панель управления (ПУ) 24, первое ключевое устройство (КУ1) 3, второе ключевое устройство (КУ2) 8, модуль управления 10, модуль настройки и диагностики 21, блока управления (БУ) 4, работают совместно и с приводом ГН.
Большинство новых элементов системы удобнее реализовать как часть программного обеспечения блока управления, при этом обработка получаемых блоком данных будет осуществляться контроллером, состоящим из модулей:
- аналого-цифрового преобразователя;
- цифроаналогового преобразователя;
- дискретного ввода - вывода;
- информационных каналов обмена, являющихся портами контроллера.
Первое и второе ключевые устройства, интеграторы по ГН и ВН, модуль управления, модуль настройки и диагностики могут быть выполнены в виде подпрограмм управления выходами цифроаналогового преобразователя ГН и ВН и дискретными выходами контроллера, а интеграторы представляют собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных блоком управления данных и выдача им сигналов управления на усилители приводов ВН и ГН будет определяться заданной частотой циклов обработки сигналов блоком управления.
Устройства настройки и диагностики представляют собой как встроенные в ОВН аппаратно-программные средства, так и средства, подключаемые к контрольному разъему блока управления стабилизатора.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию», пер. с англ. - М.: Мир, 1976).
Выходные усилители ВН и ГН блока управления могут быть выполнены по схеме, построенной на транзисторных каскадах, управляемых в режиме широтно-импульсной модуляции (ШИМ) по сигналу ШИМ, формируемому контроллером блока управления.
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
Стабилизатор вооружения работает следующим образом.
Стабилизация и стабилизированное наведение вооружения (пушки) обеспечивается в двух независимых друг от друга режимах:
- ОСНОВНОЙ, стабилизация и стабилизированное наведение вооружения (В) 35 (пушки) по ВН и ГН по сигналам с задающего устройства стабилизации (ЗУС) 2, с места наводчика ОВН;
- РЕЗЕРВНЫЙ, стабилизация и стабилизированное наведение вооружения (В) 35 (пушки) по ВН и ГН и линии визирования прицела-дублера (ПД) 20 с зависимой линией стабилизации по ВН и ГН по сигналам с собственных датчиков абсолютной угловой скорости (ДУС-ВН) 28 и (ДУС-ГН) 5 и сигналам наведения по ВН и ГН с (ПУ-Н) 1 пульта управления наводчика, с места наводчика ОВН.
Стабилизация в режиме ОСНОВНОЙ вооружения (В) 35 (пушки) осуществляется по сигналам задающего устройства стабилизации (ЗУС) 2, формирующего по цифровому каналу обмена на первом входе второго ключевого устройства (КУ2) 8 ошибки приводов по ВН и ГН, коммутируемые в соответствии с выбранным режимом работы ОВН на вход модуля управления 10.
Далее, полученные сигналы ошибок по ВН и ГН фильтруются и суммируются с соответствующими сигналами (ωВН) и (ωГН) отрицательных обратных связей по абсолютной угловой скорости пушки по ВН и ГН, формируемых по сигналам с датчиков абсолютной угловой скорости (ДУС-ВН) 28, (ДУС-ГН) 5, установленных в блоке датчиков (БД) 6 на вооружении (В) 35 (пушке). Причем контур ошибки привода ГН дополнительно охвачен сигналами отрицательных обратных связей по скорости вращения вала (ОСС) и току (ОСТ) исполнительного электродвигателя (ЭД-ГН) 17, формируемых генератором ЭМУ (Ген. ЭМУ) 13 (ЭМУ) 14 привода ГН.
Указанные сигналы обратных связей, как и в стабилизаторе-прототипе, позволяют повысить добротность и устойчивость приводов ГН и ВН, тем самым, обеспечив требуемое качество управления приводами ГН и ВН, что в сумме с новыми цифровыми алгоритмами управления позволяет уменьшить ошибку стабилизации вооружения (В) 35 (пушки) по ВН и ГН.
Одновременно с указанными сигналами обратных связей на вход модуля управления 10 блока управления (БУ) 4 подаются сигналы относительной скорости пушки и башни по ВН и ГН, полученные методом дифференцирования соответствующих сигналов (αвн) и (βГН) с датчиков положения вооружения по ВН (ДПВ-ВН) 26 и боевого модуля по ГН (ДПБМ-ГН) 12.
Полученные сигналы относительной скорости вооружения (В) 35 (пушки) и боевого модуля (БМ) 19 (башни) по ВН и ГН представляют собой обратную связь по возмущению, воздействующему соответственно на пушку и башню в плоскостях ВН и ГН при движении ОВН. Введение указанных обратных связей по возмущению в контуры управления приводами ВН и ГН позволяет дополнительно повысить точность стабилизации, вооружения (В) 35 (пушки) в плоскостях ВН и ГН.
Таким образом, полученные и обработанные модулем управления 10 сигналы управления по ВН и ГН поступают на соответствующие усилители ВН (У-ВН) 31, ГН (У-ГН) 12 блока управления (БУ) 4, формирующие соответственно сигналы управления для механизма управления гидроцилиндра (ЦИ) 34 гидропривода ВН (ГП) 32 и генератора ЭМУ (Ген. ЭМУ) 13 (ЭМУ) 14. Полученные сигналы управления по ВН и ГН преобразуются гидроцилиндром (ЦИ) 34 и (ЭМУ) 14 соответственно в линейные перемещения штока гидроцилиндра (ЦИ) 34 и силовые сигналы для управления обмотками электродвигателя ГН (ЭД-ГН) 17. Шток гидроцилиндра (ЦИ) 34, механически связанный с боевым модулем (БМ) 19 (башней) и вооружением (В) 35 (пушкой), и электродвигатель ГН (ЭД-ГН) 17, механически связанный с редуктором ГН (Ред. ГН) 18, поворачивают вооружение (В) 35 (пушку) по ВН и боевой модуль (БМ) 19 (башню) по ГН в сторону уменьшения ошибки стабилизации, тем самым удерживая направление вооружения (В) 35 (пушки) на цель.
Наведение в режиме ОСНОВНОЙ вооружения (В) 35 (пушки) осуществляется по сигналам задающего устройства стабилизации (ЗУС) 2, связанного электрически с пультом управления наводчика (ПУ-Н) 1 по ВН, ГН и формирующего по цифровому каналу обмена на первом входе второго ключевого устройства (КУ2) 8 блока управления (БУ) 4 ошибки приводов по ВН и ГН. Наводчик (оператор) ОВН пультом управления (ПУ-Н) 1 по ВН и ГН наводит стабилизированную в двух плоскостях линию визирования (прицельную марку) задающего устройства стабилизации (ЗУС) 2 на цель. Сигналы с датчиков положения ВН и ГН задающего устройства стабилизации (ЗУС) 2, пропорциональные ошибкам стабилизации по ВН и ГН, отрабатываются приводами ВН и ГН, поворачивающими вооружение (В) 35 (пушку) в сторону уменьшения ошибок ВН и ГН, аналогично рассмотренному выше режиму стабилизации в режиме ОСНОВНОЙ.
Стабилизация в режиме РЕЗЕРВНЫЙ вооружения (В) 35 (пушки) осуществляется по сигналам (ωВН) и (ωГН) датчиков абсолютной угловой скорости (ДУС-ВН) 28 и (ДУС-ГН) 5 блока датчиков (БД) 6, жестко связанных с вооружением (В) 35 (пушкой). Сигналы (ωВН) и (ωГН) датчиков абсолютной угловой скорости (ДУС-ВН) 28 и (ДУС-ГН) 5 подаются на соответствующие входы интеграторов (∫-BH) 29 и (∫-ΓΗ) 7 блока управления (БУ) 4, где их значение преобразуется в абсолютное угловое положение (ошибку) по ВН и ГН. Полученные ошибки приводов по ГН и ВН поступают соответственно на второй и третий входы второго ключевого устройства (КУ2) 8, где фильтруются и коммутируются в зависимости от текущего режима работы стабилизатора, заданного внешними устройствами 11. Алгоритм дальнейшей работы контура стабилизации установленного вооружения приводами ВН и ГН аналогичен описанному выше режиму ОСНОВНОЙ.
Наведение в режиме РЕЗЕРВНЫЙ вооружения (В) 35 (пушки) осуществляется по сигналам наведения от пульта управления наводчика (ПУ-Н) 1 с места наводчика. Сигналы по ВН и ГН с пульта управления наводчика (ПУ-Н) 1 поступают соответственно на первый вход первого ключевого устройства (КУ1) 3. Выбранные сигналы наведения по ВН и ГН подаются на соответствующие входы интеграторов (∫-BH) 29 и (∫-ΓΗ) 7 блока управления (БУ) 4, где суммируются с сигналами (ωВН) и (ωΓΗ) датчиков абсолютной угловой скорости (ДУС-ВН) 28 и (ДУС-ГН) 5, жестко связанных с вооружением (В) 35 (пушкой). Полученные, таким образом, на выходе интеграторов (∫-ВН) 29 и (∫-ΓΗ) 7 сигналы представляют собой ошибки приводов ВН и ГН с учетом знака и амплитуды соответствующего сигнала по ВН и ГН, заданного наводчиком с пульта управления наводчика (ПУ-Н) 1 в плоскостях ВН и ГН.
Наводчик наводит пультом управления наводчика (ПУ-Н) 1 по ВН, ГН вооружение (В) 35 (пушку), а с ней и прицельную марку прицела-дублера (ПД) 20 с зависимой линией стабилизации по ВН и ГН на цель, по изображению, выводимому на видеосмотровое устройство (ВСУ) 23 с видеокамеры, установленной в прицеле-дублере (ПД) 20. Оптическая ось видеокамеры (прицельная марка) прицела-дублера (ПД) 20 совмещена с его оптической осью и механически выверена с заданной точностью с каналом ствола вооружения (В) 35 (пушки).
Таким образом, заявляемый в качестве изобретения стабилизатор вооружения боевого модуля позволяет:
- повысить надежность стабилизатора вооружения, за счет использования в конструкции блока датчиков твердотельных датчиков абсолютной угловой скорости, в конструкции которых отсутствуют быстровращающиеся элементы (гироскопы), а также широкого применения интегральной цифровой элементной базы, резко сокращающей номенклатуру дискретных аналоговых элементов;
- повысить эксплутационные показатели стабилизатора вооружения, за счет введения в стабилизатор цифровых контуров управления и коррекции приводами ГН и ВН, что позволяет применить адаптивные и оптимальные алгоритмы управления стабилизатором вооружения, гибко менять его параметры при изменении механических параметров танка в процессе его эксплуатации;
- повысить эксплутационную интероперабельность стабилизатора вооружения, за счет введения в его структуру цифровых информационных каналов обмена с внешними устройствами ОВН, что позволяет резко повысить эксплутационные характеристики стабилизатора вооружения и возможность установки на другие ОВН без существенной доработки. Повышение эксплутационной интероперабельности также достигается введением в структуру стабилизатора вооружения дополнительных устройств (модулей), позволяющих проводить настройку и диагностику стабилизатора, как при помощи внешних устройств диагностики и настройки, подключаемых к контрольному разъему блока управления стабилизатора вооружения, так и при помощи встроенных средств диагностики и настройки ОВН через панель управления и видеосмотровое устройство прицельного комплекса;
- повысить точность стабилизации по ВН и ГН, за счет введения в контуры управления приводами ВН и ГН стабилизатора вооружения дополнительных сигналов обратных связей с датчиковой аппаратуры стабилизатора вооружения и ОВН, получаемых по цифровым информационным каналам обмена, что позволяет поднять устойчивость и добротность контуров управления приводами ВН и ГН. Применение датчика линейных ускорений двухплоскостного и блока датчиков абсолютных угловых скоростей, не имеющих механических чувствительных элементов, закрепленных на торсионных пружинах, позволяет повысить полосу пропускания по измеряемым координатам и, как следствие, позволяет алгоритмически более точно компенсировать внешние возмущающие воздействия и за счет этого повысить точность стабилизации не менее чем на (15-20)%;
- расширить функциональные возможности стабилизатора вооружения, за счет введения в его структуру дополнительных устройств: датчика положения боевого модуля по ГН, блока датчиков абсолютных угловых скоростей, датчика линейных ускорений двухплоскостного, за счет более высоких технических характеристик примененных устройств по сравнению с прототипом;
- уменьшить время готовности стабилизатора вооружения, за счет применения блока датчиков абсолютных угловых скоростей, использующего твердотельные датчики абсолютной угловой скорости по ГН и ВН, имеющих время готовности не более 0,1 с, и, таким образом, время готовности стабилизатора вооружения начинает определятся только временем готовности блока управления стабилизатора вооружения, которое составляет не более 10 с;
- увеличить живучесть ОВН, за счет введения в стабилизатор вооружения датчика положения боевого модуля по ГН, первого ключевого устройства, интегратора привода ГН, интегратора привода ВН, второго ключевого устройства, прицела-дублера с зависимой линией стабилизации по ВН и ГН, позволяющих обеспечить его автономную работу в случае отказа основного прицельного комплекса ОВН;
- исключить используемое напряжение 36 В 400 Гц для питания приборов стабилизатора вооружения, за счет использования датчика положения башни по ГН, блока датчиков и датчика линейных ускорений двухплоскостного, не требующих данного напряжения для работы, а использующих для питания +27 бортсети ОВН.
Таким образом, все поставленные в заявке технические задачи достигнуты.
Изобретение позволяет за счет введения в структуру СВ новых приборов и узлов, построенных на цифровой платформе, значительно расширить совместно с системой управления огнем возможности боевого применения объекта военного назначения, поднять его боевую мощь, надежность, живучесть, улучшить его технические и эксплутационные характеристики, решить вопросы по настройке и оперативной диагностике СВ в составе ОВН, что очень важно при работе экипажа в реальных боевых условиях.
Приведенные в описании технические преимущества, целесообразность и надежность стабилизатора вооружения боевого модуля, реализованного по заявляемой структурной схеме, подтверждены типовыми испытаниями опытного образца стабилизатора на модернизированном танке Т-80БВ (объект 219РВ) на испытательной базе ОАО «Омсктрансмаш» г. Омск.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам вооружения боевых модулей машин типа танков, БМП, БТР и т.п., имеющих в своем составе стабилизатор вооружения, содержащий необходимый набор внешней и внутренней датчиковой аппаратуры, входящий в состав системы управления и стабилизации вооружения. Отличительной особенностью стабилизатора вооружения боевого модуля является то, что в устройство дополнительно введены датчик положения боевого модуля по горизонтальному наведению (ГН), блок датчиков абсолютных угловых скоростей, с механически закрепленными в нем датчиком абсолютной угловой скорости по ГН и датчиком абсолютной угловой скорости по вертикальному наведению (ВН), расположенными по двум соответствующим ортогональным осям, датчик линейных ускорений двухплоскостной, с механически закрепленными в нем акселерометром ГН и акселерометром ВН, расположенными по двум соответствующим ортогональным осям, видеосмотровое устройство, панель управления, прицел-дублер с зависимой линией стабилизации по ВН и ГН. В блок управления дополнительно введены первое ключевое устройство, второе ключевое устройство, интегратор привода ГН, интегратор привода ВН, модуль настройки и диагностики стабилизатора. Технический результат - повышение надежности стабилизатора вооружения, повышение эксплутационных показателей стабилизатора вооружения, повышение эксплутационной интероперабельности стабилизатора вооружения, повышение точности стабилизации по ВН и ГН стабилизатора вооружения, расширение функциональных возможностей стабилизатора вооружения, уменьшение времени готовности стабилизатора вооружения, увеличение живучести стабилизатора, а с ним и объекта военного назначения, исключение использования переменного напряжения 36 В 400 Гц для питания блока гиротахометров и датчика линейных ускорений стабилизатора вооружения. 2 ил.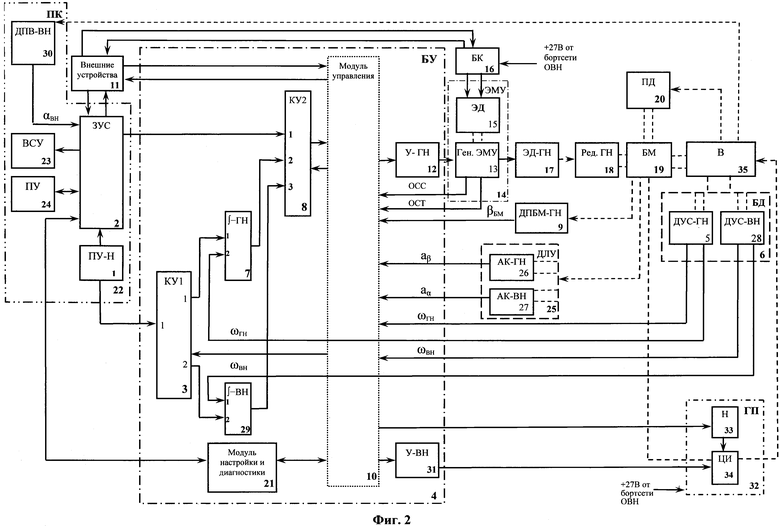
Стабилизатор вооружения боевого модуля, содержащий боевой модуль (башню) с установленным на нем вооружением (пушкой), гидропривод вертикального наведения (ВН), электрически связанный с бортсетью объекта военного назначения, цилиндр исполнительный гидропривода ВН, механически связанный с вооружением (пушкой) и боевым модулем (башней) и гидравлически с насосом гидропривода ВН, редуктор горизонтального наведения (ГН), механически связанный с боевым модулем (башней), электродвигатель ГН, механически связанный с редуктором ГН и электрически связанный с генератором электромашинного усилителя, прицельный комплекс с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, с пультом управления наводчика, электрически связанным с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН и с датчиком положения вооружения (пушки) по ВН, механически связанным с вооружением (пушкой) и электрически с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок коммутации привода ГН, электрически связанный с бортсетью объекта военного назначения, внешними устройствами и электродвигателем электромашинного усилителя, механически связанного с генератором электромашинного усилителя, блок управления, модуль управления которого электрически связан с внешними устройствами, усилителями ГН и ВН блока управления, приводным двигателем насоса гидропривода ВН и с генератором электромашинного усилителя через обратные связи по скорости и по току электродвигателя ГН, усилитель ГН блока управления, электрически связанный с генератором электромашинного усилителя, усилитель ВН блока управления, электрически связанный с входом цилиндра исполнительного гидропривода ВН, отличающийся тем, что в него введены датчик положения боевого модуля по ГН, блок датчиков абсолютных угловых скоростей, с механически закрепленными в нем датчиком абсолютной угловой скорости по ГН и датчиком абсолютной угловой скорости по ВН, расположенными по двум соответствующим ортогональным осям, датчик линейных ускорений двухплоскостной, с механически закрепленными в нем акселерометром ГН и акселерометром ВН, расположенными по двум соответствующим ортогональным осям, видеосмотровое устройство, панель управления, прицел-дублер с зависимой линией стабилизации по ВН и ГН, кроме того, в блок управления дополнительно введены первое ключевое устройство, второе ключевое устройство, интегратор привода ГН, интегратор привода ВН, модуль настройки и диагностики стабилизатора, при этом датчик положения боевого модуля по ГН механически связан с боевым модулем (башней) в плоскости ГН и электрически связан с модулем управления блока управления, блок датчиков абсолютных угловых скоростей механически, в соответствии с ориентацией собственных ортогональных осей чувствительности по ВН и ГН, связан с вооружением (пушкой) в плоскостях ГН и ВН и электрически связан с модулем управления блока управления, датчик линейных ускорений механически, в соответствии с ориентацией собственных ортогональных осей чувствительности по ВН и ГН, связан с боевым модулем (башней) в плоскостях ГН и ВН и электрически связан с модулем управления блока управления, прицел-дублер с зависимой линией стабилизации по ВН и ГН механически связан с вооружением (пушкой) и боевым модулем (башней) в плоскостях ВН и ГН, а видеосмотровое устройство, панель управления и модуль настройки и диагностики стабилизатора электрически связаны с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, причем указанные пульт управления наводчика, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН и модуль настройки и диагностики стабилизатора электрически связаны соответственно с первым входом второго ключевого устройства, с первым входом первого ключевого устройства и модулем управления блока управления, при этом, с одной стороны, выход интегратора по ГН блока управления и выходы датчиков положения независимо стабилизированного в пространстве инерциального объекта по ГН задающего устройства стабилизации связаны через цифровые каналы обмена соответственно со вторым и первым входами второго ключевого устройства, соединенного с модулем управления, второй и первый входы интегратора по ГН связаны соответственно с выходом датчика абсолютной угловой скорости по ГН блока датчиков и первым выходом первого ключевого устройства, связанного электрически с выходом пульта управления наводчика по ГН и модулем управления, электрически связанным, как указано выше, с генератором электромашинного усилителя через усилитель ГН блока управления и вращающим вал электродвигателя ГН, поворачивающим через редуктор ГН боевой модуль (башню) с вооружением (пушкой), а с ней и оптическую линию визирования по ГН прицела-дублера с зависимой линией стабилизации по ВН и ГН в плоскости ГН, с другой стороны, выход интегратора по ВН блока управления и выходы датчиков положения независимо стабилизированного в пространстве инерциального объекта по ВН задающего устройства стабилизации связаны через цифровые каналы обмена соответственно с третьим и первым входами второго ключевого устройства, соединенного с модулем управления, первый и второй входы интегратора по ВН связаны соответственно с выходом датчика абсолютной угловой скорости по ВН блока датчиков и вторым выходом первого ключевого устройства, связанного электрически с выходом пульта управления наводчика по ВН и модулем управления, электрически связанным, как указано выше, с цилиндром исполнительным привода ВН через усилитель ВН блока управления и управляющим направлением движения штока по ВН, поворачивающего вооружение (пушку) в плоскости ВН, а с ней и оптическую линию визирования по ВН прицела-дублера с зависимой линией стабилизации по ВН и ГН в плоскости ВН.
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| КОРНЕЕВ В.В., КУЗНЕЦОВ М.И., КУЗЬМИН Л.П., ПАВЛИЧУК К.И | |||
| Основы автоматики и танковые автоматические системы | |||
| -М.: МО СССР Академии бронетанковых войск им | |||
| маршала Р.Я.МАЛИНОВСКОГО, 1976 | |||
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| Воронка для поршневой разливочной машины | 1953 |
|
SU98237A1 |

