Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам вооружения (далее по тексту - СВ) боевых модулей (далее по тексту - БМ) машин типа танков, БМП, БТР и т.п., имеющих в своем составе стабилизатор вооружения, содержащий необходимый набор внешней и внутренней датчиковой аппаратуры, входящей в состав системы управления и стабилизации вооружения (СУСВ).
Изобретение позволяет за счет введения новых узлов повысить точность стабилизации установленного вооружения машин типа танков, БМП, БТР и т.п., улучшив тем самым дальность распознавания цели наводчиком, повысить вероятность попадания в цель с первого выстрела, что очень важно при работе в реальных боевых условиях, а также позволяет улучшить условия работы механика-водителя боевой машины.
Известен стабилизатор танкового вооружения 2Э42-2 БС 1.370.009 танка Т-72 (объект 184), выполненный по схеме электрической принципиальной БС 1.370.009 Э3 и описанный в БС 1.370.009 ТО, ТУ.
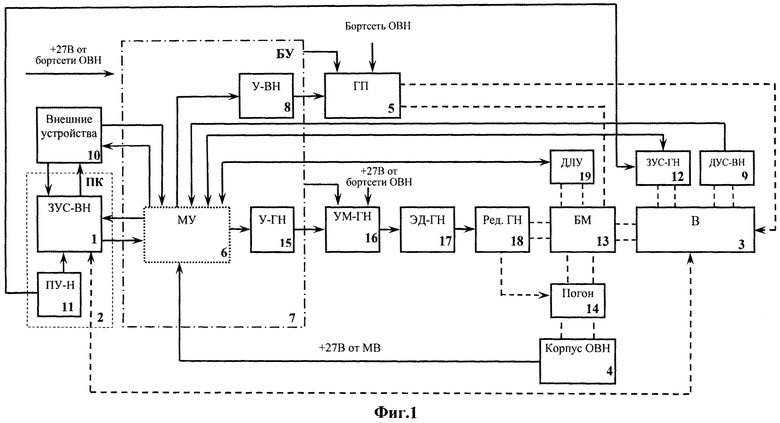
Структурная схема стабилизатора танкового вооружения (далее по тексту - СТВ) изображена на фиг.1. Данный стабилизатор танкового вооружения принят за прототип.
(См.) 1) В.В. Корнеев, М.И. Кузнецов и др. «Основы автоматики и танковые автоматические системы», М.: Министерство обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.
2) Министерство обороны СССР, Главное бронетанковое управление. Танк Т-72Б. Техническое описание и инструкция по эксплуатации. Книга первая, М.: Воениздат, 1986 г. 107 с.
Стабилизатор танкового вооружения - прототипа в основном состоит из двух приводов:
- привода вертикального наведения (далее по тексту - ВН) и стабилизации;
- привода горизонтального наведения (далее по тексту - ГН) и стабилизации.
Привод ГН стабилизатора вооружения построен на базе электромеханического привода, а привод ВН на базе электрогидравлического привода.
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением.
Стабилизатор вооружения боевого модуля (далее по тексту - СВ БМ), принятый за прототип, представляет собой два автономных привода по ГН и ВН, обеспечивающие наведение и стабилизацию основного вооружения боевого модуля (БМ) танка Т-72 в плоскостях ГН и ВН по сигналам, поступающим соответственно от задающего устройства стабилизации по ГН (далее по тексту - ЗУС-ГН), установленного непосредственно на вооружении (В) и от задающего устройства стабилизации по ВН (далее по тексту - ЗУС-ВН), установленного на боевом модуле (БМ).
Рассмотрим работу каждого из приводов ВН и ГН стабилизатора вооружения боевого модуля (СВ БМ) в отдельности.
Режим стабилизации по ВН - режим стабилизации вооружения по ВН осуществляется относительно сигнала с датчика угла по ВН - датчика положения линий визирования по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2, имеющего независимую стабилизацию линии визирования (зеркала) в плоскости ВН, что обеспечивается собственным гиростабилизатором задающего устройства стабилизации по ВН (ЗУС-ВН) 1.
При движении танка (далее по тексту - объекта военного назначения, сокращенно - ОВН) по пересеченной местности на вооружение (В) 3 действуют внешние возмущения в виде колебаний корпуса ОВН 4, трения в цапфах (опорах) вооружения (В) 3, трения в исполнительном цилиндре гидропривода ВН (ГП) 5, а также возмущения, обусловленные неуравновешенностью вооружения (В) 3 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 3 от заданного сигналом датчика положения (угла) независимо стабилизированной линии визирования по ВН (ЗУС-ВН) 1 положения. При этом ротор датчика положения линии визирования по ВН (ЗУС-ВН) 1 механически связан с осью наружной рамки трехстепенного гироскопа, а статор механически соединен через параллелограммный механизм с вооружением (В) 3 в плоскости ВН, испытывая тем самым те же угловые колебания при движении ОВН, что и вооружение (В) 3 в плоскости ВН.
Угол между заданным и действительным направлением вооружения (В) 3 в вертикальной плоскости в этом случае и определяет ошибку стабилизации стабилизатора вооружения в плоскости ВН.
Полученная таким образом ошибка стабилизации по ВН со статора датчика положения (угла) по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2 поступает на вход аналогового модуля управления (МУ) 6 блока управления (БУ) 7 стабилизатора вооружения, формируя на его входе сигнал рассогласования (ошибки) в плоскости ВН. Обработанный сигнал с выхода модуля управления (МУ) 6, пропорциональный ошибке стабилизации в плоскости ВН, поступает на вход усилителя ВН (У-ВН) 8, где усиливается до величины, необходимой для управления механизмом управления цилиндра исполнительного гидропривода ВН (ГП) 5, который обеспечивает поворот вооружения (В) 3 в направлении уменьшения рассогласования между заданным значением сигнала со статора датчика положения (угла) линии визирования по ВН (ЗУС-ВН) 1 и истинным положениями вооружения (В) 3 в плоскости ВН.
Для повышения устойчивости привода ВН и как следствие получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости вооружения (В) 3 в плоскости ВН с датчика абсолютной угловой скорости (ДУС-ВН) 9, обрабатываемая аналоговым модулем управления (МУ) 6 блока управления (БУ) 7.
Управление включением гидропривода ВН (ГП) 5 осуществляется по команде блока управления (БУ) 7 по сигналу от внешних устройств 10 и при условии отсутствия блокировок по приводу ВН.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 3 по ВН осуществляется также по сигналу с датчика положения линии визирования по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2. При обнаружении цели наводчик пультом наведения (ПУ-Н) 11 наводит, как было описано выше, стабилизированную в плоскости ВН линию визирования (прицельную марку) (ЗУС-ВН) 1 на цель в плоскости ВН. Сигнал с датчика положения (угла) линий визирования по ВН (ЗУС-ВН) 1, пропорциональный ошибке стабилизации по ВН, поступает на вход модуля управления (МУ) 6 блока управления (БУ) 7, где происходит его преобразование с выдачей сигнала управления на усилитель (У-ВН) 8. Гидропривод ВН (ГП) 5 поворачивает вооружение (В) 3 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Другие сигналы с внешних устройств 10 связанные с (ЗУС-ВН) 1 и (ПУ-Н) 10 (ПК) 2 представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор вооружения, так и в оборудование ОВН в целом.
Режим стабилизации по ГН - режим стабилизации вооружения (В) 3 по ГН осуществляется по сигналу датчика положения (угла) по ГН (ЗУС-ГН) 12 стабилизатора вооружения. Задающее устройство стабилизации по ГН (ЗУС-ГН) 12 жестко закреплено на вооружении (В) 3 и состоит из трехстепенного гироскопа с датчиком положения наружной рамки, механизм работы которого аналогичен работе гиростабилизатора задающего устройства стабилизации по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2.
При движении ОВН по пересеченной местности на боевой модуль (БМ) 13 (вооружение (В) 3 действуют внешние возмущения в виде колебаний корпуса танка 4, трения в погоне 14 боевого модуля (БМ) 13, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 13 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 13 (вооружения (В) 3 от заданного сигналом датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 12 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 13 (вооружения (В) 3) в горизонтальной плоскости в этом случае и определяет ошибку стабилизатора вооружения (СВ) по ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН стабилизатора вооружения (СВ), поворачивающим боевой модуль (БМ) 13 (вооружение (В) 3 в сторону уменьшения ошибки. При стабилизации боевого модуля (БМ) 13 одновременно осуществляется и стабилизация линии визирования по ГН прицельного комплекса (ПК) 2 (зависимая стабилизация линии визирования).
Полученная таким образом ошибка стабилизации по ГН с задающего устройства стабилизации по ГН (ЗУС-ГН) 12 обрабатывается аналоговым модулем управления (МУ) 6 блока управления (БУ) 7 стабилизатора вооружения (СВ). Сигнал с первого выхода модуля управления 6 через усилитель (У-ГН) 15 поступает на усилитель мощности (УМ-ГН) 16. Электромашинный усилитель мощности (УМ-ГН) 16, в свою очередь, вырабатывает напряжение соответствующего знака и амплитуды, под действием которого исполнительный электродвигатель (ЭД-ГН) 17 через редуктор (Ред.ГН) 18 поворачивает боевой модуль (БМ) 13 (вооружение (В) 3 ОВН в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 12 и истинным положением боевого модуля (БМ) 13 (вооружения (В) 3) в горизонтальной плоскости.
Для повышения точности стабилизации и уменьшения ошибки привода ГН в его контуре дополнительно используется компенсационный сигнал, пропорциональный линейному ускорению (БМ) 13 в поперечно-вертикальной плоскости, формируемый датчиком линейных ускорений (ДЛУ) 19, соединенным электрическим сигналом с модулем управления (МУ) 6 блока управления (БУ) 7 и жестко установленным на боевом модуле (БМ) 13.
Управление включением усилителя мощности ГН (УМ-ГН) 16 привода ГН осуществляется по команде блока управления (БУ) 7 по сигналу от внешних устройств 10 и при условии отсутствия блокировок по приводу ГН.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 13 (вооружения (В) 3) по ГН осуществляется также по сигналу с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 12. При обнаружении цели наводчик пультом наведения (ПУ-Н) 11 по ГН (ПК) 2 наводит линию визирования (прицельную марку) по ГН прицельного комплекса (ПК) 2 на цель в плоскости ГН, что обеспечивается за счет магнитов наведения гиростабилизатора и сигнала с датчика положения (угла) по ГН задающего устройства стабилизации по ГН (ЗУС-ГН) 12 стабилизатора вооружения (СВ). Сигнал с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 12, пропорциональный ошибке стабилизации по ГН, поступает на вход модуля управления (МУ) 6 блока управления (БУ) 7, где происходит его преобразование как описано выше. Исполнительный электродвигатель (ЭД ГН) 17 через редуктор (Ред.ГН) 18 поворачивает боевой модуль (БМ) 13 (вооружение (В) 3 ОВН, а с ним и линию визирования (ПК) 2 в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Режим аварийного поворота по ГН - режим обеспечивает отворот боевого модуля (БМ) 13 по ГН (вооружения (В) 3 от люка механика-водителя для обеспечения его беспрепятственного выхода из ОВН через собственный люк. Режим включается при нажатии механиком-водителем кнопки «MB» (механик-водитель) на щитке, расположенном на его рабочем месте.
При нажатии кнопки «MB» на щитке механика-водителя, относящемуся к корпусу ОВН 4 производится выдача дискретного сигнала в модуль управления (МУ) 6 блока управления (БУ) 7 и далее через (У-ГН) 15 на (УМ-ГН) 16. Исполнительный электродвигатель (ЭД-ГН) 17 через редуктор (Ред. ГН) 18 поворачивает боевой модуль (БМ) 13 относительно корпуса ОВН 4 влево, до момента отпускания механиком-водителем кнопки «MB» на щитке механика-водителя. При этом механик-водитель оценивает положение (БМ) 13 (вооружения (В) 3 относительно корпуса ОВН 4 (момент отпускания кнопки «MB»), при котором ему обеспечен беспрепятственный выход из корпуса ОВН 4 только косвенно, по расположению элементов на крыше вращающегося транспортера автомата заряжания, вращающегося вместе с (БМ) 13 и находящегося у него сзади (за спинкой сидения).
Недостатками вышеуказанного СВ БМ - прототипа являются:
- низкая точность стабилизации установленного вооружения по ГН;
- отсутствие возможности точного приведения БМ по ГН в требуемое походное положение, обеспечивающее удобство выхода механика-водителя из корпуса ОВН через собственный люк.
Техническими задачами заявляемого изобретения являются:
- повышение точности стабилизации установленного вооружения по ГН (снижение ошибки не менее чем на 20%);
- обеспечение возможности точного приведения боевого модуля (БМ) по ГН в походное положение для удобства выхода механика-водителя;
Для достижения указанного технического результата в известный стабилизатор вооружения (СВ) боевого модуля (БМ) системы управления и стабилизации вооружения, содержащий боевой модуль (БМ), кинематически связанный через погон с корпусом объекта военного назначения (ОВН), вооружение (В), кинематически закрепленное на боевом модуле (БМ), внешние устройства, связанные с прицельным комплексом (ПК), состоящим в свою очередь из задающего устройства стабилизации по ВН (ЗУС-ВН), механически связанного с вооружением (В) и электрически связанного с пультом управления наводчика (ПУ-Н), блок управления (БУ), включающий в себя модуль управления (МУ), усилитель ВН (У-ВН), усилитель ГН (У-ГН), привод ВН с гидроприводом (ГП), привод ГН с датчиком линейных ускорений (ДЛУ), жестко связанный с боевым модулем (БМ) и электрически связанный с модулем управления (МУ) блока управления (БУ), усилителем мощности ГН (УМ-ГН), исполнительным электродвигателем ГН (ЭД-ГН), редуктором (Ред. ГН), установленным на боевом модуле (БМ) и кинематически связанным с погоном, с жестко установленными на вооружении (В), датчиком абсолютной угловой скорости по ВН (ДУС-ВН) и задающим устройством стабилизации по ГН (ЗУС-ГН), и электрически связанными с модулем управления (МУ) блока управления (БУ), при этом задающее устройство стабилизации по ГН (ЗУС-ГН) электрически связано с пультом управления наводчика (ПУ-Н) прицельного комплекса (ПК), отличающийся тем, что в него согласно изобретению дополнительно введены:
- датчик абсолютной угловой скорости по ГН (ДУС-ГН),
- датчик положения боевого модуля (ДПБМ), содержащий:
- редуктор (Ред. ДПБМ),
- датчик положения (ДП),
а в блок управления (БУ) дополнительно введены:
- блок логики (БЛ),
- сумматор (∑),
- первое звено коррекции (ЗК1),
- второе звено коррекции (ЗК2),
- третье звено коррекции (ЗК3),
причем датчик абсолютной угловой скорости по ГН (ДУС-ГН) жестко установлен на вооружении (В) и электрически соединен со вторым звеном коррекции (ЗК2) блока управления (БУ),
при этом чувствительный элемент датчика положения (ДП) кинематически связан с редуктором (Ред. ДПБМ), который в свою очередь связан с погоном, и электрически соединен с модулем управления (МУ) и третьим звеном коррекции (ЗК3) блока управления (БУ), а корпус датчика положения боевого модуля (ДПБМ) жестко связан боевым модулем (БМ),
в свою очередь второе звено коррекции (ЗК2) и третье звено коррекции (ЗК3) соединены с входами сумматора (∑), а выход сумматора (∑) соединен с первым звеном коррекции (ЗК1), в свою очередь выход первого звена коррекции (ЗК1) соединен первым входом с блока логики (БЛ), второй вход блока логики (БЛ) соединен с пультом управления наводчика (ПУ-Н) прицельного комплекса (ПК), а выход блока логики (БЛ) соединен с модулем управления (МУ) блока управления (БУ) стабилизатора вооружения (СВ) боевого модуля (БМ).
Сопоставительный анализ с прототипом показывает, что в заявляемый стабилизатор вооружения боевого модуля (СВ БМ) системы управления и стабилизации вооружения введены новые компоненты, а именно:
- датчик абсолютной угловой скорости по ГН (ДУС-ГН),
- датчик положения боевого модуля (ДПБМ), содержащий:
- редуктор (Ред. ДПБМ),
- датчик положения (ДП) БМ в плоскости ГН,
а в блок управления (БУ) дополнительно введены:
- блок логики (БЛ),
- сумматор (∑),
- первое звено коррекции (ЗК1),
- второе звено коррекции (ЗК2),
- третье звено коррекции (ЗК3),
их связями с другими элементами стабилизатора вооружения боевого модуля (СВ БМ) и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в заявляемый стабилизатор вооружения боевого модуля (СВ БМ) позволяет решить следующие задачи:
1. Повысить точность стабилизации установленного вооружения по ГН в составе СВ БМ (снижение ошибки не менее чем на 20%) за счет введения в канал управления привода ГН положительной (по отношению к сигналу ошибки привода ГН) обратной связи по возмущению боевого модуля (БМ) в горизонтальной плоскости (ГН), получаемой путем алгебраического суммирования с заданными коэффициентами сигналов:
- с датчика абсолютной угловой скорости по ГН (ДУС-ГН), обработанного вторым звеном коррекции (ЗК2),
- датчика положения боевого модуля (ДПБМ), обработанного третьим звеном коррекции (ЗК3),
с последующей обработкой полученного таким образом суммарного сигнала полосовым фильтром первого звена коррекции (ЗК1) блока управления (БУ) (в описание).
Полученный таким образом суммарный сигнал поступает на первый вход блока логики (БЛ) блока управления (БУ).
Блок логики (БЛ) обеспечивает решение следующих задач:
- ограничения амплитуды обратной связи по возмущению боевого модуля (БМ) в соответствии с заданной величиной, определяемой механическими параметрами ОВН;
- изменения коэффициента обратной связи по возмущению боевого модуля (БМ), зависящего от уровня сигнала ГН с пульта управления наводчика (ПУ-Н), поступающего на второй вход блока логики (БЛ).
2. Обеспечить возможность точного приведения боевого модуля (БМ) по ГН в походное положение для удобства выхода механика-водителя из корпуса ОВН за счет использования сигнала с (ДПБМ) в канале управления привода ГН модуля управления (МУ) блока управления (БУ). При нажатии кнопки «MB», на щитке механика-водителя, происходит переключение СВ БМ с сигнала ошибки привода ГН (с ЗУС-ГН) на отработку сигнала разности между текущим положением боевого модуля (БМ) и установленным заранее (при настройке СВ БМ) в модуле управления (МУ) требуемым положением боевого модуля (БМ), соответствующим его походному положению.
Предлагаемое изобретение позволяет улучшить технические и эксплуатационные характеристики стабилизатора вооружения (СВ) боевых модулей указанных выше боевых машин и боевых модулей дистанционно-управляемых систем вооружения, решить вопросы по их оперативной настройке и диагностике, что достигается применением в предлагаемом СВ блоке управления (БУ) цифрового контроллера, разработанного на новой элементной базе, построенной на современной цифровой платформе с использованием высокоскоростных цифровых информационных каналов обмена данных с внешними устройствами ОВН.
Устройство и работа заявляемого изобретения поясняются графическими материалами.
На фиг.1 приведена структурная схема СВ БМ - прототипа; на фиг.2 приведена заявляемая структурная схема СВ БМ.
Сокращения, принятые в тексте и на фиг.1 и фиг.2:
БЛ - блок логики;
БМ - боевой модуль;
БМП - боевая машина пехоты;
БТР - бронетранспортер;
БУ - блок управления стабилизатора вооружения;
В - установленное вооружение;
ВН - вертикальное наведение;
ГН - горизонтальное наведение;
ГП - гидропривод ВН;
ДЛУ - датчик линейных ускорений;
ДПБМ - датчик положения боевого модуля;
ДУС-ВН - датчик абсолютной угловой скорости по ВН;
ДУС-ГН - датчик абсолютной угловой скорости по ГН;
ЗК1 - первое звено коррекции;
ЗК2 - второе звено коррекции;
ЗК3 - третье звено коррекции;
ЗУС-ВН - задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ВН;
ЗУС-ГН - задающее устройство стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта по ГН;
MB - сигнал с кнопки механика водителя;
МУ - модуль управления;
ОВН - объект военного назначения;
ПК - прицельный комплекс;
ПУ-Н - пульт управления наводчика;
Ред. ГН - редуктор ГН;
Ред. ДПБМ - редуктор датчика положения боевого модуля;
СВ БМ - стабилизатор вооружения боевого модуля;
СВ - стабилизатор вооружения;
СТВ - стабилизатор танкового вооружения;
СУСВ - система управления и стабилизации вооружения;
У-ВН - усилитель ВН;
У-ГН - усилитель ГН;
УМ-ГН - усилитель мощности ГН;
ЭД-ГН - электродвигатель ГН;
βБМ - электрический сигнал с датчика положения боевого модуля;
∑ - сумматор;
ωБМ - электрический сигнал, пропорциональный скорости поворота боевого модуля;
ωВ - электрический сигнал абсолютной угловой скорости вооружения боевого модуля с ДУС-ГН;
ωВ1 - электрический сигнал, пропорциональный абсолютной угловой скорости вооружения боевого модуля после обработки вторым звеном коррекции (ЗК2).
Стабилизатор вооружения боевого модуля содержит приводы ВН и ГН и служит для наведения, стабилизации и управления установленного вооружения боевого модуля.
Чувствительный элемент задающего устройства стабилизации по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2 механически связан с установленным вооружением (В) 3. Вооружение (В) 3 кинематически через цапфенный узел связано с боевым модулем (БМ) 4, который в свою очередь через погон 5 кинематически связан корпусом ОВН 6.
Пульт управления наводчика (ПУ-Н) 7 прицельного комплекса (ПК) 2 электрически связан с задающим устройством стабилизации по ВН (ЗУС-ВН) 1, которое в свою очередь электрически связано с внешними устройствами 8 и модулем управления (МУ) 9 блока управления (БУ) 10. Внешние устройства 8 в свою очередь также электрически связаны с модулем управления (МУ) 9 блока управления (БУ) 10.
Пульт управления наводчика (ПУ-Н) 7 прицельного комплекса (ПК) 2 электрически связан с задающим устройством стабилизации по ГН (ЗУС-ГН) 11. Задающее устройство стабилизации по ГН (ЗУС-ГН) 11 жестко закреплено на вооружении (В) 3 и состоит из трехстепенного гироскопа с датчиком положения наружной рамки, механизм работы которого аналогичен работе гиростабилизатора задающего устройства стабилизации по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2 и электрически связано с модулем управления (МУ) 9 блока управления (БУ) 10.
Датчик абсолютной угловой скорости по ВН (ДУС-ВН) 12 жестко связан с установленным вооружением (В) 3 и электрически связан с модулем управления (МУ) 9 блока управления (БУ) 10.
Датчик линейных ускорений (ДЛУ) 13 жестко связан с боевым модулем (БМ) 4 и электрически связан с модулем управления (МУ) 9 блока управления (БУ) 10.
Корпус ОВН 6 электрически связан с модулем управления (МУ) 9 блока управления (БУ) 10 сигналом по цепи «+27В от MB».
Датчик абсолютной угловой скорости по ГН (ДУС-ГН) 14 жестко связан с установленным вооружением (В) 3 и электрически связан со вторым звеном коррекции (ЗК2) 15 блока управления (БУ) 10, представляющим собой фильтр, ограничивающий высокие частоты и режекторный фильтр, устраняющий резонансную полосу механической части БМ по ГН.
Корпус датчика положения боевого модуля (ДПБМ) 16 жестко связан с боевым модулем (БМ) 4. Датчик положения (ДП) 17 датчика положения боевого модуля (ДПБМ) 16 механически через редуктор ДПБМ (Ред. ДПБМ) 18 связан с погоном 5 и электрически связан с модулем управления (МУ) 9 и третьим звеном коррекции (ЗК3) 19 блока управления (БУ) 10, представляющим собой низкочастотное дифференцирующее звено первого порядка с откатом в области высоких частот.
Второе звено коррекции (ЗК2) 15 и третье звено коррекции (ЗК3) 19 электрически связаны с сумматором (∑) 20, который в свою очередь электрически связан с первым звеном коррекции (ЗК1) 21, представляющим собой полосовой фильтр.
Первое звено коррекции (ЗК1) 21 электрически связано с первым входом блока логики (БЛ) 22, представляющего собой ключевое устройство с встроенной функцией ограничения амплитуды и крутизны обратной связи по возмущению. Пульт управления наводчика (ПУ-Н) 7 прицельного комплекса (ПК) 2 электрически связан со вторым входом блока логики (БЛ) 22, который в свою очередь электрически связан с модулем управления (МУ) 9 блока управления (БУ) 10.
Модуль управления (МУ) 9 электрически связан с усилителем ВН (У-ВН) 23 блока управления (БУ) 10, который в свою очередь электрически связан с механизмом управления цилиндра исполнительного гидропривода ВН (ГП) 24. Цилиндр исполнительный гидропривода ВН (ГП) 24 механически связан с боевым модулем (БМ) 4 установленным вооружением (В) 3. Приводной двигатель насосной установки гидропривода ВН (ГП) 24 связан с «бортсетью ОВН» и включается в работу из блока управления (БУ) 10.
Модуль управления (МУ) 9 электрически связан с усилителем ГН (У-ГН) 25 блока управления (БУ) 10, который в свою очередь электрически связан с усилителем мощности ГН (УМ-ГН) 26. Усилитель мощности ГН (УМ-ГН) 26 электрически связан с электродвигателем ГН (ЭД-ГН) 27, который в свою очередь механически связан с редуктором ГН (Ред. ГН) 28.
Усилитель мощности ГН (УМ-ГН) 26 электрически связан с «+27В от бортсети ОВН» и включается в работу из блока управления (БУ) 10.
Корпус редуктора ГН (Ред. ГН) 28 жестко связан с боевым модулем (БМ) 4 и кинематически связан с погоном 5.
Блок управления (БУ) 10 электрически связан с «+27В от бортсети ОВН».
Режимы работы стабилизатора вооружения боевого модуля.
Режим стабилизации по ВН - режим стабилизации вооружения по ВН осуществляется относительно сигнала с датчика угла по ВН - датчика положения линий визирования по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2, имеющего независимую стабилизацию линий визирования (зеркала) в плоскости ВН, что обеспечивается собственным гиростабилизатором задающего устройства стабилизации по ВН (ЗУС-ВН) 1.
При движении ОВН по пересеченной местности на вооружение (В) 3 действуют внешние возмущения в виде колебаний корпуса ОВН 6, трения в цапфах (опорах) вооружения (В) 3, трения в исполнительном цилиндре гидропривода ВН (ГП) 24, а также возмущения, обусловленные неуравновешенностью вооружения (В) 3 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 3 от заданного сигналом датчика положения (угла) независимо стабилизированной линии визирования по ВН (ЗУС-ВН) 1 положения. При этом ротор датчика положения линий визирования по ВН (ЗУС-ВН) 1 механически связан с осью наружной рамки трехстепенного гироскопа, а статор механически соединен через параллелограммный механизм с вооружением (В) 3 в плоскости ВН, испытывая, тем самым, те же угловые колебания при движении ОВН, что и вооружение (В) 3 в плоскости ВН.
Угол между заданным и действительным направлением вооружения (В) 3 в вертикальной плоскости, в этом случае, и определяет ошибку стабилизации стабилизатора вооружения в плоскости ВН.
Полученная таким образом ошибка стабилизации по ВН со статора датчика положения (угла) по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2 поступает на вход модуля управления (МУ) 9 блока управления (БУ) 10 стабилизатора вооружения, формируя на его входе сигнал рассогласования (ошибки) в плоскости ВН. Обработанный сигнал с выхода модуля управления (МУ) 9, пропорциональный ошибке стабилизации в плоскости ВН, поступает на вход усилителя ВН (У-ВН) 23, где усиливается до величины, необходимой для управления механизмом управления цилиндра исполнительного гидропривода ВН (ГП) 24, который обеспечивает поворот вооружения (В) 3 в направлении уменьшения рассогласования между заданным значением сигнала со статора датчика положения (угла) линии визирования по ВН (ЗУС-ВН) 1 и истинным положениями вооружения (В) 3 в плоскости ВН.
Для повышения устойчивости привода ВН и как следствие получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости вооружения (В) 3 в плоскости ВН с (ДУС-ВН) 12, обрабатываемая модулем управления (МУ) 9 блока управления (БУ) 10.
Управление включением гидропривода ВН (ГП) 24 осуществляется по команде блока управления (БУ) 10 по сигналу от внешних устройств 8 и при отсутствии блокировок по приводу ВН.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 3 по ВН осуществляется также по сигналу с датчика положения линии визирования по ВН (ЗУС-ВН) 1 прицельного комплекса (ПК) 2. При обнаружении цели наводчик пультом управления наводчика (ПУ-Н) 7 наводит, как было описано выше, стабилизированную в плоскости ВН линию визирования (прицельную марку) (ЗУС-ВН) 1 на цель в плоскости ВН. Сигнал с датчика положения (угла) линий визирования по ВН (ЗУС-ВН) 1, пропорциональный ошибке стабилизации по ВН, поступает на вход модуля управления (МУ) 9 блока управления (БУ) 10, где происходит его преобразование с выдачей сигнала управления на усилитель (У-ВН) 23. Гидропривод ВН (ГП) 24 поворачивает вооружение (В) 3 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Другие сигналы с внешних устройств 8, связанные с (ЗУС-ВН) 1 прицельного комплекса (ПК) 2 и модулем управления (МУ) 9 блока управления (БУ) 10, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор вооружения, так и в оборудование ОВН в целом.
Режим стабилизации по ГН - режим стабилизации вооружения (В) 3 по ГН осуществляется по сигналу датчика положения (угла) по ГН (ЗУС-ГН) 11 стабилизатора вооружения.
При движении ОВН по пересеченной местности на боевой модуль (БМ) 4 (вооружение (В) 3) действуют внешние возмущения в виде колебаний корпуса ОВН 6, трения в погоне 5 боевого модуля (БМ) 4, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 4 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 4 (вооружения (В) 3) от заданного сигналом датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 4 (вооружения (В) 3) в горизонтальной плоскости в этом случае и определяет ошибку стабилизатора вооружения по ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН стабилизатора вооружения, поворачивающим боевой модуль (БМ) 4 (вооружение (В) 3) в сторону уменьшения ошибки. При стабилизации боевого модуля (БМ) 4 одновременно осуществляется и стабилизация линии визирования по ГН прицельного комплекса (ПК) 2.
Полученная таким образом ошибка стабилизации по ГН с задающего устройства стабилизации по ГН (ЗУС-ГН) 11 обрабатывается модулем управления (МУ) 9 блока управления (БУ) 10 стабилизатора вооружения. Сигнал с выхода модуля управления (МУ) 9 через усилитель (У-ГН) 25 поступает на усилитель мощности (УМ-ГН) 26. Усилитель мощности (УМ-ГН) 26, в свою очередь, вырабатывает напряжение соответствующего знака и амплитуды, под действием которого исполнительный электродвигатель (ЭД-ГН) 27 через редуктор (Ред. ГН) 28 поворачивает боевой модуль (БМ) 4 (вооружение (В) 3) ОВН в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11 и истинным положением боевого модуля (БМ) 4 (вооружения (В) 3) в горизонтальной плоскости.
Управление включением усилителя мощности ГН (УМ-ГН) 26 привода ГН осуществляется по команде блока управления (БУ) 10 по сигналу от внешних устройств 8 и при отсутствии блокировок по приводу ГН.
Для повышения точности стабилизации и уменьшения ошибки привода ГН в его контуре дополнительно используется компенсационный сигнал, пропорциональный линейному ускорению БМ в поперечно-вертикальной плоскости, формируемый датчиком линейных ускорений (ДЛУ) 13, соединенным электрическим сигналом с модулем управления (МУ) 9 блока управления (БУ) 10 и жестко установленным на боевом модуле (БМ) 4.
Дополнительно для повышения точности стабилизации установленного вооружения по ГН в составе СВ БМ (снижение ошибки не менее чем на 20%) введены обратные связи по абсолютной угловой скорости вооружения (В) 3 в плоскости ГН с (ДУС-ГН) 14 и сигнал с датчика положения боевого модуля (ДПБМ) 16, обработанные соответственно вторым звеном коррекции (ЗК2) 15 и третьим звеном коррекции (ЗК3) 19 блока управления (БУ) 10.
«βБМ» представляет собой электрический сигнал с датчика положения (ДП) 17 датчика положения боевого модуля (ДПБМ) 16, величина сигнала с которого пропорциональна углу поворота боевого модуля (БМ) 4 относительно корпуса ОВН 6, за счет механической связи редуктора ДПБМ (Ред. ДПБМ) 18 и погона 5 ОВН.
«ωВ» представляет собой электрический сигнал абсолютной угловой скорости вооружения боевого модуля с (ДУС-ГН) 14.
Выходы (ЗК2) 15 и (ЗК3) 19 представляют собой соответственно:
- «ωВ1» электрический сигнал, пропорциональный абсолютной угловой скорости вооружения боевого модуля после обработки вторым звеном коррекции (ЗК2) 15;
- «ωБМ» электрический сигнал, пропорциональный скорости поворота боевого модуля после обработки третьим звеном коррекции (ЗК3) 19.
После алгебраического суммирования сигналов с (ЗК2) 15 и (ЗК3) 19 в модуле сумматора (∑) 20 вырабатывается компенсационный сигнал по скорости возмущения боевого модуля (БМ) 4 в плоскости ГН, который обрабатывается первым корректирующим звеном (ЗК1) 21, представляющим собой полосовой фильтр. Выход первого звена коррекции (ЗК1) 21 поступает на первый вход блока логики (БЛ) 22, представляющим собой ключевое устройство, запрещающее прохождение корректирующего сигнала в модуль управления (МУ) 9 при поступлении сигнала с пульта управления наводчика (ПУ-Н) 7 прицельного комплекса (ПК) 2 через второй вход блока логики (БЛ) 22 блока управления (БУ) 10.
Введение компенсационного сигнала по возмущению боевого модуля (БМ) 4 в плоскости ГН в модуль управления (МУ) 9 позволяет повысить добротность контура управления, что дает возможность введения дополнительного коэффициента по ошибке и, следовательно, добиться ее уменьшения.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 4 (вооружения (В) 3) по ГН осуществляется также по сигналу с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 4. При обнаружении цели наводчик пультом управления наводчика (ПУ-Н) 7 по ГН (ПК) 2 наводит линию визирования (прицельную марку) по ГН прицельного комплекса (ПК) 2 на цель в плоскости ГН, что обеспечивается за счет магнитов наведения гиростабилизатора и сигнала с датчика положения (угла) по ГН задающего устройства стабилизации по ГН (ЗУС-ГН) 11 стабилизатора вооружения. Сигнал с датчика положения (угла) задающего устройства стабилизации по ГН (ЗУС-ГН) 11, пропорциональный ошибке стабилизации по ГН, поступает на вход модуля управления (МУ) 9 блока управления (БУ) 10, где происходит его преобразование как описано выше. Исполнительный электродвигатель (ЭД-ГН) 27 через редуктор (Ред. ГН) 28 поворачивает боевой модуль (БМ) 4 (вооружение (В) 3) ОВН, а с ним и линию визирования прицельного комплекса (ПК) 2 в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Режим аварийного поворота по ГН и поворота по ГН в походное положение - режим обеспечивает отворот боевого модуля (БМ) 4 по ГН от люка механика водителя при нажатой кнопке «MB» (механик водитель) на щитке механика водителя.
При нажатии кнопки «MB» на щитке механика водителя, относящемуся к корпусу ОВН 6, производится выдача дискретного сигнала «+27В от MB» в модуль управления (МУ) 9 блока управления (БУ) 10.
При этом происходит переключение управления в модуле управления (МУ) 9 блока управления (БУ) 10 на сигнал с датчика положения (ДП) 17 датчика положения боевого модуля (ДПБМ) 16 и его суммирование с заранее установленной сбивкой. В результате вырабатывается сигнал ошибки, который через (У-ГН) 25 подается на усилитель мощности ГН (УМ-ГН) 26.
Исполнительный электродвигатель (ЭД-ГН) 27 через редуктор (Ред. ГН) 28 поворачивает боевой модуль (БМ) 4 относительно корпуса ОВН 6 влево, до вхождения ошибки в установленную зону или до прекращения нажатия кнопки «MB» на щитке механика водителя.
Большинство новых элементов таких как блок логики (БЛ), сумматор (∑), первое звено коррекции (ЗК1), второе звено коррекции (ЗК2), третье звено коррекции (ЗК3), блока управления заявляемого СВ БМ с датчиком положения боевого модуля реализованы как часть программного обеспечения контроллера блока управления (БУ) СВ БМ, при этом обработка получаемых и передаваемых данных осуществляется модулями контроллера, такими как, модули аналого-цифрового преобразования и цифро-аналогового преобразования.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер. с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып.1).
(См. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с.).
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность стабилизатора вооружения боевого модуля, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца СВ БМ на испытательной базе ОАО «СКБ ПА» и ОАО «КЭМЗ» г. Ковров, ОАО «61БТРЗ» г. Санкт Петербург и ОАО «УКБТМ», ОАО «НПК Уралвагонзавод» г. Нижний Тагил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
Изобретение относится к области вооружения и военной техники, в частности к стабилизаторам вооружения боевых модулей (далее - СВ БМ) систем управления и стабилизации вооружения боевых модулей машин типа танков, БМП, БТР, БРДМ и т.п., а также дистанционно-управляемых боевых модулей систем вооружения объектов военного назначения (ОВН), имеющих в своем составе стабилизатор вооружения (далее по тексту - СВ) с необходимым набором датчиковой аппаратуры, в том числе, и датчиком положения боевого модуля (далее по тексту - ДПБМ). Целями заявляемого изобретения являются:
- повышение точности стабилизации установленного вооружения по ГН (снижение ошибки не менее чем на 20%);
- введение возможности точного приведения боевого модуля (БМ) по ГН в походное положение для удобства выхода механика водителя.
Указанная цель достигается тем, что в стабилизатор вооружения боевого модуля дополнительно введены с соответствующими связями с другими элементами ОВН новые компоненты, а именно датчик абсолютной угловой скорости по ГН, датчик положения боевого модуля, содержащий редуктор датчика положения боевого модуля, датчик положения БМ в плоскости ГН, а в блок управления (БУ) дополнительно введены блок логики, сумматор, первое звено коррекции, второе звено коррекции, третье звено коррекции. Предлагаемое изобретение позволяет улучшить технические и эксплуатационные характеристики стабилизатора вооружения боевых модулей указанных выше боевых машин и боевых модулей дистанционно-управляемых систем вооружения. 2 ил.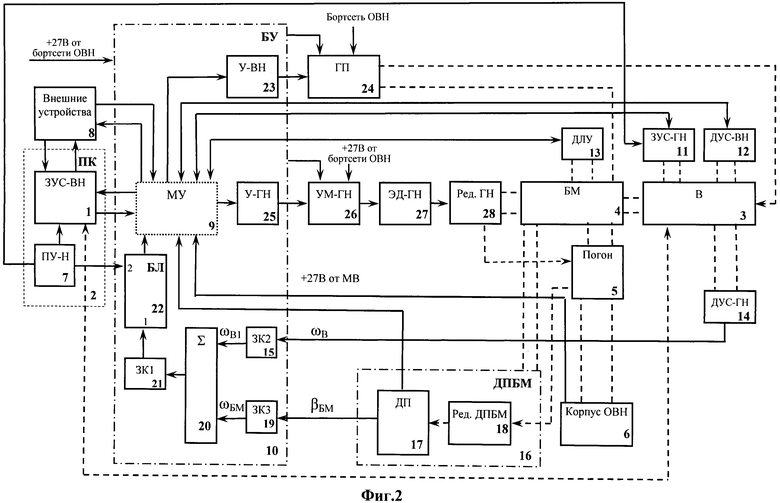
Стабилизатор вооружения боевого модуля системы управления и стабилизации вооружения, содержащий боевой модуль, кинематически связанный через погон с корпусом объекта военного назначения, вооружение, кинематически закрепленное на боевом модуле, внешние устройства, связанные с прицельным комплексом, состоящим в свою очередь из задающего устройства стабилизации по ВН, механически связанного с вооружением и электрически связанного с пультом управления наводчика, блок управления, включающий в себя модуль управления, усилитель ВН, усилитель ГН, привод ВН с гидроприводом, привод ГН с датчиком линейных ускорений, жестко связанный с боевым модулем и электрически связанный с модулем управления блока управления, усилителем мощности ГН, исполнительным электродвигателем ГН, редуктором, установленным на боевом модуле и кинематически связанным с погоном, с жестко установленными на вооружении датчиком абсолютной угловой скорости по ВН и задающим устройством стабилизации по ГН, и электрически связанными с модулем управления блока управления, при этом задающее устройство стабилизации по ГН электрически связано с пультом управления наводчика прицельного комплекса, отличающийся тем, что в него дополнительно введены датчик абсолютной угловой скорости по ГН, датчик положения боевого модуля, содержащий редуктор датчика положения боевого модуля, датчик положения, а в блок управления дополнительно введены блок логики, сумматор, первое звено коррекции, второе звено коррекции, третье звено коррекции, причем датчик абсолютной угловой скорости по ГН жестко установлен на вооружении и электрически соединен со вторым звеном коррекции блока управления, при этом чувствительный элемент датчика положения кинематически связан с редуктором датчика положения боевого модуля, который в свою очередь связан с погоном, и электрически соединен с модулем управления и третьим звеном коррекции блока управления, а корпус датчика положения боевого модуля жестко связан боевым модулем, в свою очередь второе звено коррекции и третье звено коррекции соединены с входами сумматора, а выход сумматора соединен с первым звеном коррекции, в свою очередь выход первого звена коррекции соединен первым входом с блоком логики, второй вход блока логики соединен с пультом управления наводчика прицельного комплекса, а выход блока логики соединен с модулем управления блока управления стабилизатора вооружения боевого модуля.
| КОРНЕЕВ В.В., КУЗНЕЦОВ М.И., КУЗЬМИН Л.П., ПАВЛИЧУК К.И | |||
| Основы автоматики и танковые автоматические системы | |||
| -М.: МО СССР Академии бронетанковых войск им | |||
| маршала Р.Я.МАЛИНОВСКОГО | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2013 |
|
RU2525148C1 |
| Воронка для поршневой разливочной машины | 1953 |
|
SU98237A1 |
| Конвейер для заготовочных цехов обувных фабрик | 1960 |
|
SU134624A1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138757C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| Устройство для разработки и удаления грунта из кессона | 1938 |
|
SU60862A1 |

