Группа изобретений относится к способу рентгеновской томографии и устройству для его осуществления. Область применения охватывает техническую диагностику, например исследование и аттестацию материалов.
Известны и широко применяются различные способы и устройства рентгеновской томографии, например, рентгеновской диагностики [1, 2, 3].
Существенным признаком этих способов и устройств является то, что формируется рентгеновское излучение, которым облучается объект исследования. По анализу проходящего через объект исследования излучения выносится решение о характеристиках внутренней структуры объекта.
Недостатки способов и устройств заключаются в низкой точности оценки внутренней структуры объекта, малом быстродействии, низких функциональных возможностях (незначительный класс диагностируемых объектов) и опасностью применения для обслуживающего персонала из-за значительного рентгеновского излучения.
В качестве прототипа рассмотрим способ, реализующий рентгеновскую компьютерную томографию [4]. Устройство, реализующее этот способ, содержит блок рентгеновского излучателя, блок электромеханики, выполненный с возможностью обеспечения сканирующих перемещений блока рентгеновского излучателя, на пути выходного рентгеновского пучка которого последовательно расположены исследуемый объект и соответствующий детектор.
Недостатки способа и устройства заключаются в низкой точности и быстродействия анализа внутренней структуры объекта, невысоких функциональных возможностях, невозможности дефектоскопии крупногабаритных объектов, невозможности работы с вычислительной сетью любой топологии.
Задача настоящего изобретения состоит в повышении точности и быстродействия восстановления и анализа трехмерной структуры объекта, расширении функциональных возможностей, повышении быстродействии работы и обеспечения возможности работы в вычислительной сети любой топологии.
Решение поставленной задачи достигается тем, что, как и в прототипе, в заявленном способе рентгеновской томографии, заключающимся в том, что облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом, восстанавливают изображения по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта, причем восстановление трехмерного изображения осуществляют при вращении и смещении объекта по трем взаимно перпендикулярным осям системы координат, связанной с рабочей зоной объекта при корректировке управления последней, а текущие и эталонные интегральные характеристики изображения объекта формируют в виде спектральных и фрактальных признаков, а также геометрические признаки локальных и интегральных участков изображений объекта определяют в виде параметров, площадей, радиусов, длины, ширины, количества точек перегиба контура, геометрических центров элементов изображений, кроме того формируют псевдоцветные изображения внутренней микроструктуры объекта и уменьшают до безопасного уровня рентгеновское излучение и вибрацию.
Отличие заключается в том, что блок рентгеновского излучения и блок детекторов устанавливаются на отдельной скобе, обеспечивающей смещение по вертикальной и горизонтальной осям и смещения блока рентгеновского излучения и блока детекторов вдоль оптической оси, и угловые наклоны в вертикальной и горизонтальной плоскостях блока рентгеновского излучения и блока детекторов, осуществляют сжатие и фильтрацию восстановленных изображений, классифицируют дефекты и распределяют вычислительные операции.
Кроме того, сжатие восстановленных изображений осуществляется специализированным форматом хранения трехмерных теневых проекций в виде воксельного октодерева, извлечения трехмерных теневых проекций путем распаковки дерева, удаление фоновых шумов на изображениях теневых проекций методом обрезания граничных яркостей по градиентам.
Кроме того, вычислительные операции производятся путем распределения нагрузки на аппаратные блоки, масштабирования и сокращения времени выполнения операций за счет разделения программного обеспечения на три независимых части - клиент, сервер, визуализатор.
Кроме того, вычислительные операции объединены в виде интегрированной среды, позволяющей управлять и одновременно взаимодействовать с несколькими аппаратными блоками, функционировать в вычислительной сети любой топологии.
Поставленная задача достигается также, что как и известное заявленное устройство рентгеновской томографии содержит последовательно соединенные блок рентгеновского излучения, объект, блок детекторов, первый аналого-цифровой преобразователь и электронно-вычислительную машину, ко второму входу которой подключен второй аналого-цифровой преобразователь, входом соединенный через блок измерения энергетического спектра рентгеновского излучения с вторым выходом блока детектора, а выход электронно-вычислительной машины подключен к блоку электромеханики, оно также содержит, во-первых, последовательно соединенные двунаправленными линиями, введенными между дополнительными выходами и входами электронно-вычислительной машины блок восстановления трехмерных изображений, блок формирования цветных псевдоизображений, блок связи с Интернетом, отдельным входом, подключенным через блок дефектоскопии к отдельному выходу блока восстановления трехмерных изображений, и блок нейросетевого метрологического обеспечения, во-вторых, управляемая рабочая зона, введенная между выходами и входами объекта и блока электромеханики, отдельными двунаправленными линиями, подключенными через блок адаптивного структурно-перестраиваемого управления, соединенным отдельной двунаправленной связью с управляемой рабочей зоной, к электронно- вычислительной машине, в-третьих, между дополнительными выходом и выходом объекта и входами выходами электронно-вычислительной машины включены блок лазерного оптико-телевизионного метрологического обеспечения и второй интерфейс, соединенные двунаправленными линиями, в-четвертых, защитный корпус от рентгеновского излучения и вибрации, отдельным выходом подключенным к второму выходу блока рентгеновского излучения, а первым выходом, подключенным к отдельным входам блока рентгеновского излучения, объекта, блока электромеханики, блока детекторов, блока измерения энергетического спектра рентгеновского излучения, первый аналого-цифровой преобразователь, второй аналогово-цифровой преобразователь, блок нейросетевого метрологического обеспечения, блок дефектоскопии, блок восстановления трехмерных изображений и блок формирования цветных псевдоизображений, а другими двунаправленными линиями соединенным с управляемым источником питания, блока регулирования температуры и адаптивного блока виброизоляции, подключенного отдельными двунаправленными линиями через интерфейс к электронно-вычислительной машине, причем, во-первых, блок регулирования температуры соединен двумя отдельными двунаправленными линиями с интерфейсом, а другой отдельной двунаправленной линией соединен с защитным корпусом от рентгеновского излучения и вибрации, во-вторых, управляемый источник питания соединен отдельными двунаправленными линиями с интерфейсом, а выходом - со всеми блоками устройства, в-третьих, блок формирования цветных псевдоизображений подключен к монитору, в-четвертых, управляемая рабочая зона выполнена в виде электромехатронного модуля на основе магнитопроводов-роторов, имеющих возможность смещать исследуемый объект по трем взаимно-перпендикулярным направлениям и разворачивать исследуемый объект вокруг трех взаимно перпендикулярных осей, в-пятых, упомянутый блок адаптивного структурно-перенастраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой, в-шестых, блок адаптивного структурно-перестраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой, в-седьмых, блок лазерного оптико-телевизионного метрологического обеспечения выполнен в виде триангуляционного измерителя положения исследуемого объекта, в-восьмых, блок нейросетевого метрологического обеспечения выполнен в виде адаптивной схемы, содержащей обучаемый слой нейронов и выходной слой нейронов, обеспечивающих калибровку изображений при его четкой и нечеткой кластеризации, в-девятых, блок восстановления трехмерных изображений выполнен в виде последовательных схем захвата теневых проекций, реконструкции виртуальных сечений, создания предварительных сечений и построения 3D-изображения, в-десятых, блок дефектоскопии выполнен в виде последовательных схем реконструкции методом пространственной области, градиентным методом, корреляционным методом, нейронных сетей и схемы обозначения дефектов, управляемых по запросу пользователя на поиск и анализ дефектов, в-одиннадцатых, блок формирования цветных псевдоизображений выполнен в виде последовательности схем оценки плотностей слоев 3D-реконструкции, сопоставления псевдоцветов различным слоям 3D-реконструкции и формирования 3D-псевдореконструкции изображений, в-двенадцатых, защитный корпус от рентгеновского излучения выполнен в виде экрана рентгеновского излучения на основе многослойного защитного материала, в-тринадцатых, адаптивный блок виброизоляции выполнен в виде пружинно-механических демпферов, в-четырнадцатых, блок регулирования температуры выполнен в виде адаптивного регулятора температуры внутри корпуса томографа, содержащего воздушную принудительную вентиляцию и водяной отвод тепла, в-пятнадцатых, управляемый источник питания выполнен в виде бесперебойного источника питания, содержащего блок аккумуляторов, блок солнечной батареи и блок питания от электрической сети.
Новым является то, что оно дополнительно содержит управляемый блок электромеханики, выполненного в виде четырехкоординатного манипулятора.
Кроме того, ступенчато-управляемый высоковольтный блок питания выполнен в виде высоковольтного преобразователя с фиксированным установлением напряжения.
Кроме того, блок охлаждения выполнен в виде принудительного жидкостного охлаждения путем циркуляции воды или специальной жидкостной смеси.
Кроме того, блок калибровки дефектоскопии выполнен в виде накладываемой регулярной сетки на восстановленное 3D изображение, также учета погрешности оптической системы.
Кроме того, блок подготовки паспорта объекта сортирует несплошности или включения по размеру и форме - круг, треугольник, квадрат, трапеция, линии, овал, неправильная структура.
Кроме того, блок управления выполнен в виде синхронизатора и установления тестового и рабочего режима работы блока рентгеновского излучения, а блока детекторов и блока измерения энергетического спектра рентгеновского излучения.
Предлагаемый способ и устройство иллюстрируется чертежами, представленными на фиг. 1 - фиг. 6.
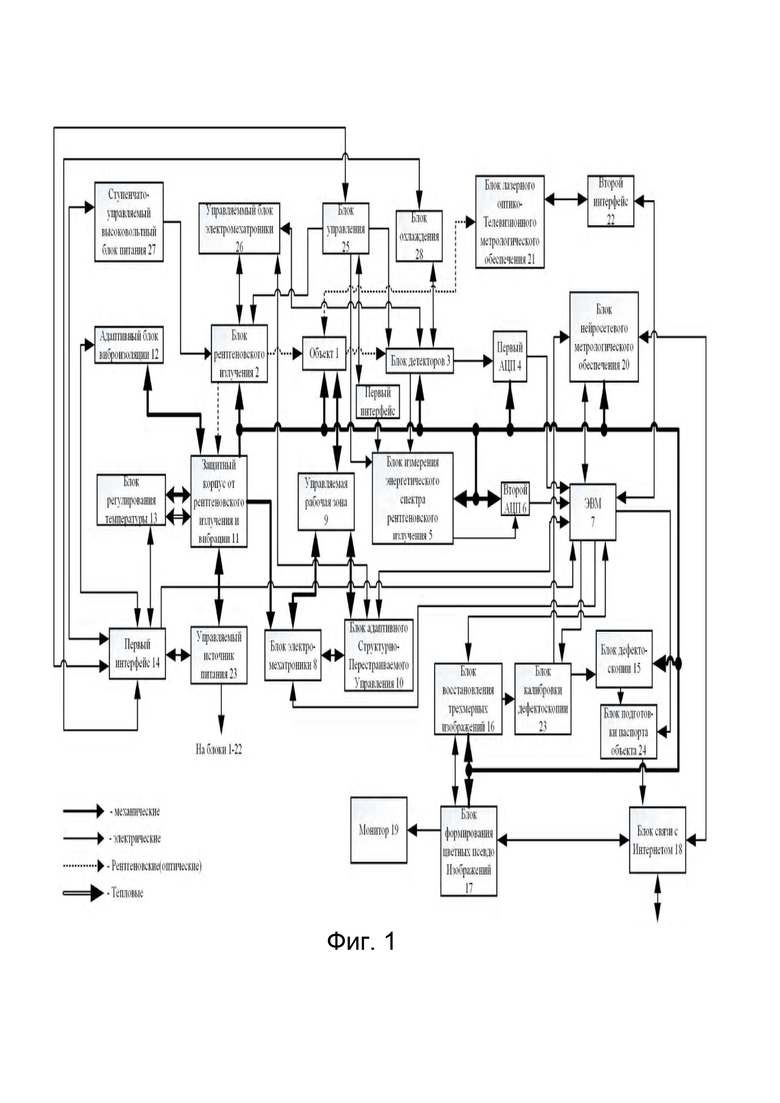
На фиг. 1 дана структурная схема устройства.
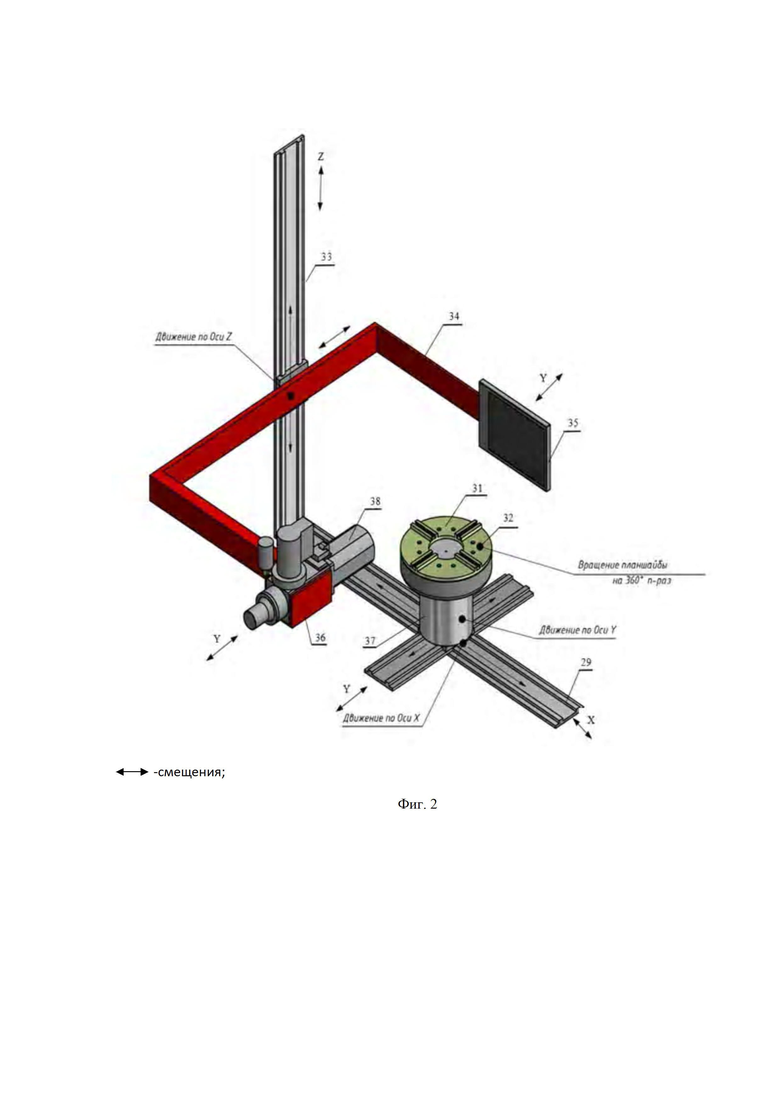
На фиг. 2 представлен общий вид четырех координатный электромехатронный блок, управляемой рабочей зоны.
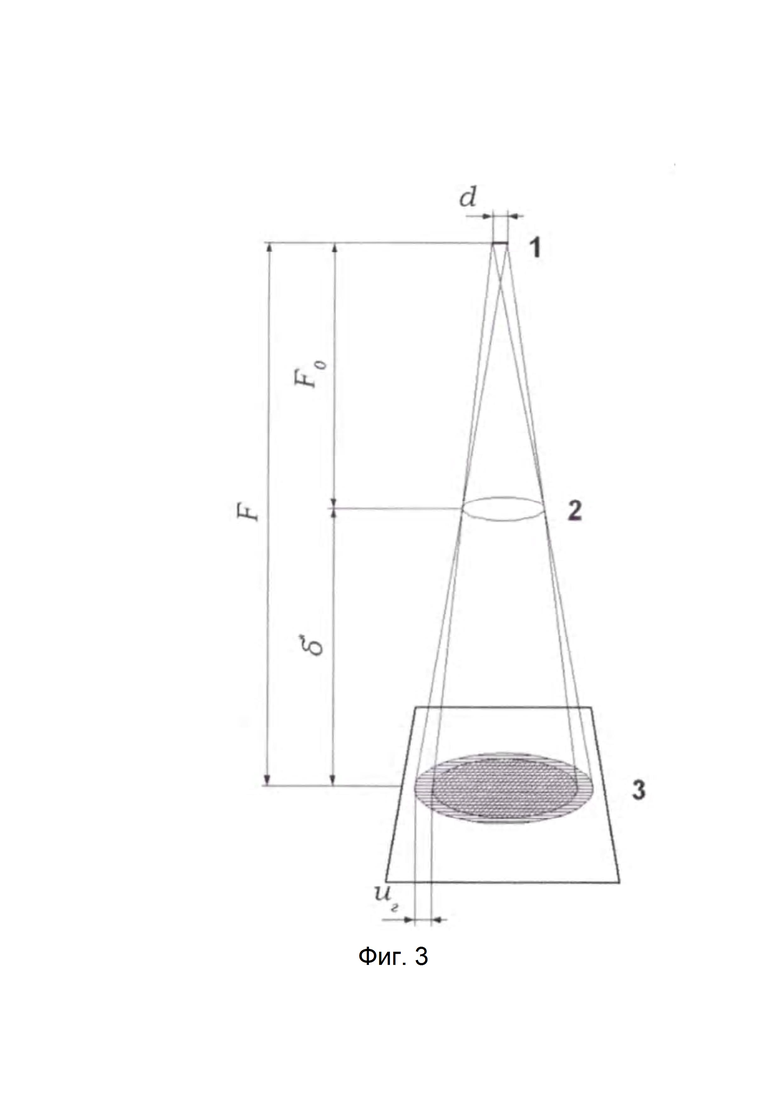
На фиг. 3 показана оптическая схема рентгеновской топографии.
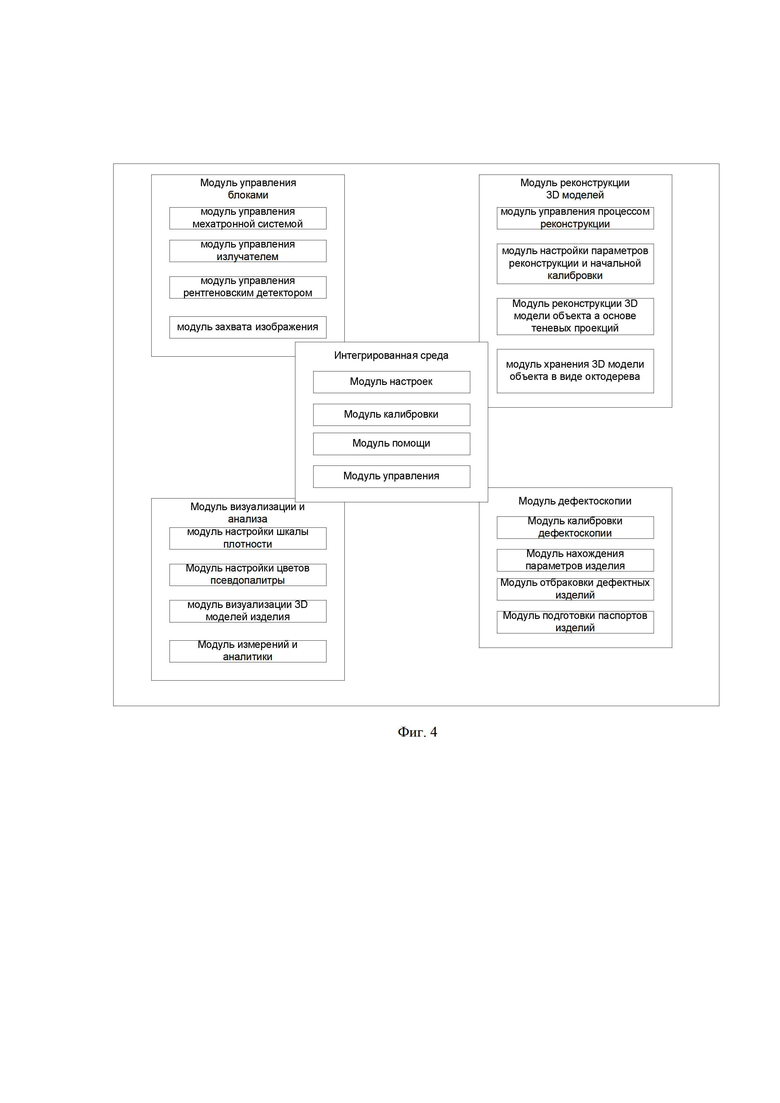
На фиг. 4 представлена структурная схема интегрированной среды программного обеспечения устройства.
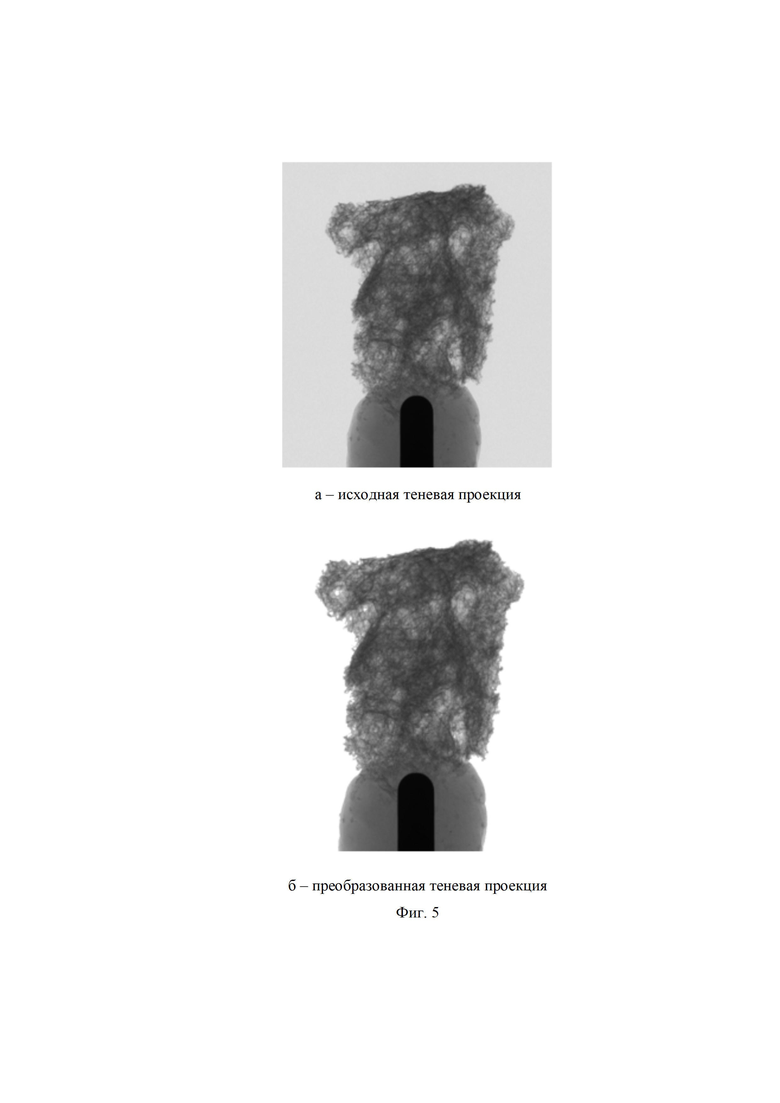
На фиг. 5 дан пример работы устройства (преобразование изображений).
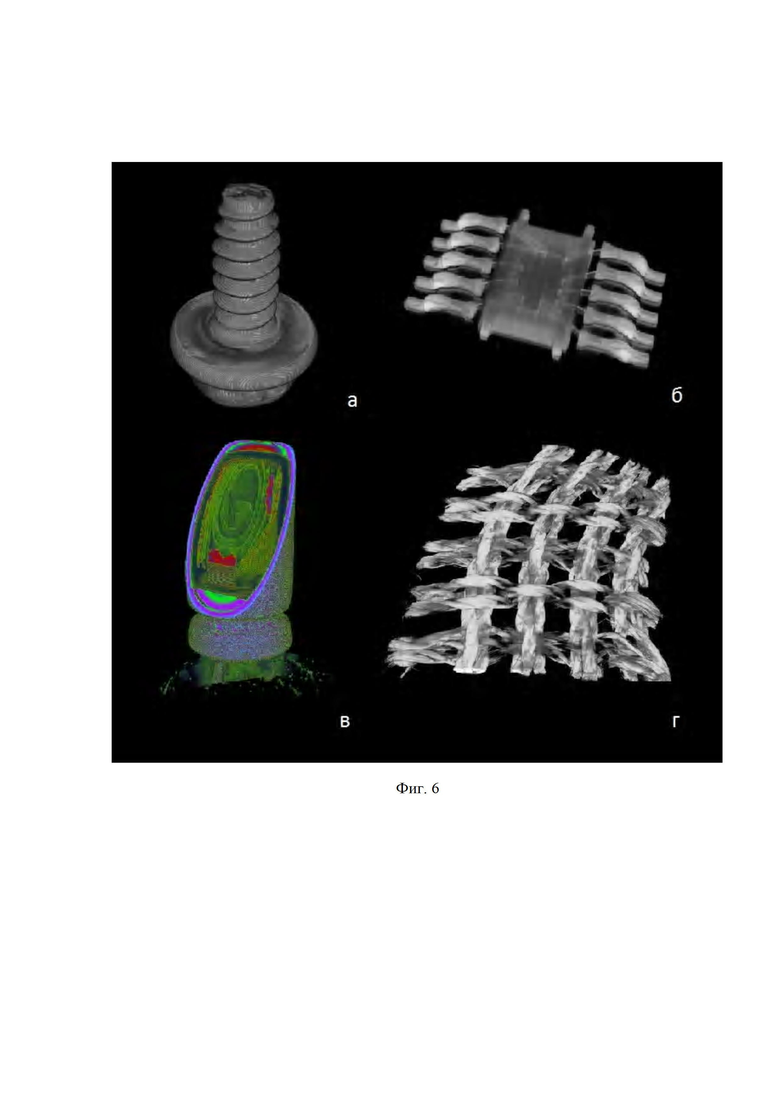
На фиг. 6 приведены примеры восстановленных внутренних структур.
На фиг. 1 представлена структурная схема устройства, которая содержит следующие узлы:
1 - объект;
2 - блок рентгеновского излучения (БРИ);
3 - блок детекторов;
4 - первый аналогово-цифровой преобразователь (АЦП) ;
5 - блок измерения энергетического спектра рентгеновского излучения (БИЭСРИ);
6 - второй АЦП;
7 - электронно-вычислительная машина (ЭВМ) ;
8 - блок электромеханики;
9 - управляемая рабочая зона;
10 - блок адаптивного структурно-перестраиваемого управления (БАСПУ);
11 - защитный корпус от рентгеновского излучения и вибрации (ЗКРИВ);
12 - адаптивный блок виброизоляции;
13 - блок регулирования температуры (БРТ) ;
14 - интерфейс;
15 - блок дефектоскопии;
16 - блок восстановления трехмерных изображений (БВТИ) ;
17 - блок формирования цветных псевдоизображений (БФЦП);
18 - блок связи с Интернетом (БСИ) ;
19 - монитор;
20 - блок нейросетевого метрологического обеспечения (БНМО) ;
21 - блок лазерного оптико-телевизионного метрологического обеспечения;
22 - второй интерфейс;
23 - блок калибровки дефектоскопии;
24 - блок подготовки паспорта изделия;
25 - блок управления;
26 - управляемый блок электромехатроники;
27 - ступенчато управляемый высоковольтный блок питания;
28 - блок охлаждения.
Устройство работает следующим образом.
Блок рентгеновского излучения (БРИ) 2 облучает объект 1, который размещается на управляемой рабочей зоне (УРЗ) 9. Рентгеновские лучи БРИ 2, проникая через объект 1, поступают на блок детекторов 3, воспринимающий поэлементно полный кадр изображения внутренней структуры объекта 1. Аналоговый сигнал от блока детекторов 3 оцифровывается АЦП 4 и поступает на ЭВМ 7, на второй вход которой приходит цифровой сигнал от второго АЦП 6, преобразующий сигнал от блока измерения энергетического спектра рентгеновского излучения (БИЭСРИ) 5. Этот блок измеряет составляющие спектра сигнала, снимаемого с блока детекторов 3.
Считывание изображения блоком детекторов 3 осуществляется при вращении объекта 1 вокруг вертикальной оси и смещении объекта 1 по двум взаимно-перпендикулярным осям в горизонтальной плоскости и смещении объекта 1 в вертикальной плоскости. На фиг. 2 показана система координат, повороты и смещения объекта 1.
Такие манипуляции с объектом 1 производятся блоком электромеханики 8 через управляемую рабочую зону (УРЗ) 9, куда устанавливается объект 1. Уточнение (корректировка) перемещений УРЗ 9 осуществляется блоком адаптивного структурно-перестраиваемого управления (БАСПУ) 10. Цифровые сигналы от первого АЦП 4 и второго АЦП 6 поступают на ЭВМ 7, которая преобразует сигналы в цифровой массив, отображающий кадр энергетического спектра рентгеновского изображения.
С помощью блока восстановления трехмерных изображений (БВТИ) 16 восстанавливается трехмерное изображение внутренней структуры объекта 1 по его теневым проекциям. Затем блок калибровки дефектоскопии 23 калибрует считываемые изображения с помощью регулярной сетки, накладываемой на изображение, восстановленное блоком 16. Кроме этого, блоком калибровки дефектоскопии 23 учитываются погрешности оптической системы. После этого блоком дефектоскопии 15 определяются несплошности (дефекты - трещины, включения мусора и т.п. 4). Блок подготовки паспорта объекта 24 сортирует (классифицируем) несплошности (включения) по размеру (длина, ширина, площадь) и форме (круг, овал, неправильная форма, линия). Затем блок формирования псевдоцветных изображений (БФЦП) 17, используя информацию от БВТИ 16, представляет на экране монитора 19 псевдоцветное изображение. Результаты работы устройства передаются от блока дефектоскопии 15 и БФЦП 17 в систему Интернет через блок связи с Интернетом 18.
Все перечисленные блоки устройства, включая объект 1, располагаются в защитном корпусе от рентгеновского излучения (ЗКРИВ) 11, который, во-первых, обеспечивает изоляцию окружающей среды от рентгеновского излучения, во-вторых, осуществляет нормальную температуру внутри корпуса 11 путем регулирования температуры блоком регулирования температуры (БРТ) 13, в-третьих, исключения вибрации от окружающей среды с помощью адаптивного блока виброизоляции (АБИ) 12. Кроме этого, блок детекторов 3 охлаждается блоком охлаждения 3, осуществляющим жидкостное (водяное, специальной смеси) и воздушное охлаждение по специальной программе, управляемой от ЭВМ 7 через первый интерфейс 13. Управление АБИ 12 и БРТ 13 производится от ЭВМ 7 через интерфейс 14. Блок нейросетевого метрологического обеспечения (БНМО) 20 осуществляет метрологическую проверку устройства в эталонном (предварительном) и рабочем состоянии.
Блок лазерного оптико-телевизионного метрологического обеспечения (БЛОТМО) 21 обеспечивает метрологическую проверку устройства (контроль размещения объекта 1 в рабочей зоне 9), при этом используется принцип триангуляции для контроля местоположения объекта 1 [5]. Связь БЛОТМО 21 с ЭВМ 7 производится с помощью интерфейса 22.
Электропитание блоков устройства осуществляется управляемым источником питания (УИП) 23, который содержит аккумулятор, блок солнечной батареи и блок питания от сети 220 вольт (50 герц). Кроме того, с помощью ступенчато-управляемого высоковольтного блока питания 27 устанавливается необходимое высоковольтное напряжение. На этом один цикл работы устройства заканчивается.
На фиг. 2 представлен четырех координатный электромехатронный блок 9 (управляемая рабочая зона), который содержит следующие узлы:
29 - направляющая по оси X;
30 - направляющая по оси Y;
31 - исполнительный блок вращения рабочей зоны вокруг вертикальной оси Z;
32 - планшайба (предметный столик);
33 - направляющая по вертикальной оси Z;
34 - скоба крепления;
35 - приемник блока детекторов 3;
36 - электропривод смещения скобы 33 (по оси Z);
37 - электропривод смещения рабочей зоны по осям X, Y и вращения рабочей зоны вокруг оси Z;
38 - рентгеновский излучатель;
На фиг. 2 показаны стрелками смещенная по осям X, Y, Z.
Четырех координатный электромехатронный блок 9 (управляемая рабочая зона) функционирует следующим образом. На предметный столик (закрепляемый на планшайбе 32) размещается объект 1, который с помощью исполнительного блока вращения 31 вращается вокруг вертикальной оси Z на 360° на n раз и перемещается с помощью исполнительного блока вращения 31 по осям X и Y. С помощью электропривода 36 смещается скоба 33 по вертикальной оси Z, на которой устанавливаются рентгеновский излучатель 38 и приемник 3D блока детекторов 35. Кроме этого, излучатель 38 может смещаться по оси  для настройки оптической резкости объекта 1 (устранение оптической нерезкости) [5]. Уменьшают до безопасного уровня рентгеновское излучение и вибрацию.
для настройки оптической резкости объекта 1 (устранение оптической нерезкости) [5]. Уменьшают до безопасного уровня рентгеновское излучение и вибрацию.
На фиг. 3 представлена схема формирования геометрической нерезкости от фокусного расстояния: 1 - источник излучения, 2- элемент объекта контроля, 3 - матрица блок детектора.
Объект исследования является самым важным источником данных для определения таких параметров, как энергия рентгеновского излучения (напряжение на трубке), тип источника рентгеновского излучения, толщина защитных свинцовых экранов (от рассеянного излучения) и схема просвечивания. Все эти параметры выбираются в зависимости от геометрических размеров контролируемого изделия, чтобы чувствительность контроля не превышала половины размера по глубине минимального из недопустимых дефектов. Конкретные значения недопустимых дефектов регламентируются технической документацией на контролируемый объект.
И для светового, и для ионизирующего излучения действуют одни и те же законы геометрической оптики при образовании тени (полутени). Тень, формируемая объектом исследования, к размеру соответствующего объекта исследования (фиг. 3).
Математически проекционное увеличение M можно вычислить по следующим отношениям:

где  - расстояние от фокусного пятна рентгеновской трубки до объекта;
- расстояние от фокусного пятна рентгеновской трубки до объекта;  - расстояние от фокусного пятна рентгеновской трубки до детектора;
- расстояние от фокусного пятна рентгеновской трубки до детектора;  - размер объекта исследования;
- размер объекта исследования;  - проекционное увеличение объекта исследования.
- проекционное увеличение объекта исследования.
Степень геометрической нерезкости любой тени зависит от размеров источника излучения (фокусного пятна или активной части) и от положения контролируемого объекта между источником и радиационным изображением (фиг. 3)
Суммарная погрешность рентгенооптической системы характеризует степень геометрической неточности:

где  - размер источника излучения;
- размер источника излучения;  - расстояние от элемента объекта контроля до детектора;
- расстояние от элемента объекта контроля до детектора;  - расстояние от источника излучения до объекта контроля;
- расстояние от источника излучения до объекта контроля;  - фокусное расстояние.
- фокусное расстояние.
Если детектор помещать в непосредственной близости от объекта контроля, то мощно считать равной толщине объекта  .
.
Условие соразмерности геометрической нерезкости определяют из следующего:  при просвечивании тонкостенных изделий;
при просвечивании тонкостенных изделий;  при просвечивании изделий большей толщины, когда рассеянное излучение существенным образом ухудшает выявляемость дефектов. Для уменьшения геометрической нерезкости следует принять источники излучения с малым фокальным пятном.
при просвечивании изделий большей толщины, когда рассеянное излучение существенным образом ухудшает выявляемость дефектов. Для уменьшения геометрической нерезкости следует принять источники излучения с малым фокальным пятном.
Фокусное расстояние следует выбирать таким образом, чтобы геометрическая нерезкость  была соизмерима со значением внутренней нерезкости
была соизмерима со значением внутренней нерезкости  .
.
Для определения фокусного расстояния используют соотношение:
Увеличение фокусного расстояния позволяет уменьшить нерезкость, но при этом снижается интенсивность излучения и увеличивается время экспозиции.
Для уменьшения (или устранения) погрешности используется специальные дополнительные смещения и повороты блока рентгеновского излучения и блока детекторов.
На фиг. 4 дана структурная схема интегрированной среды управления устройства, которая содержит модуль управления блоками, модуль реконструкции 3D-модули (изображения), модуль дефектоскопии и модуль визуализации и аналитики.
Преимущества и характеристики вычислительной среды:
1) Специальный формат хранения теневых проекций, позволяющий оптимизировать процесс считывания данных с дисковой системы, а также экономить время реконструкции и сократить требуемый для реконструкции объем памяти.
При послойной реконструкции 3D-модели для реконструкции каждого слоя используются данные одновременно со всех теневых проекций. Очевидно, что при реконструкции определенного слоя используются соответствующие слои на изображениях теневых проекций.
Пример теневой проекции изображен на фиг. 5а. Если преобразовать набор теневых проекций в набор слоев теневых проекций, где каждое изображение соответствуют последовательности одного и того же слоя со всех теневых проекций, как показано на фиг. 5б, получатся такие исходные данные, которые будут считываться единожды, последовательно и непрерывно при послойной реконструкции.
Высота изображения в пикселях соответствует общему числу теневых проекций, линия 1 на изображении - слой первой теневой проекции, линия N - тот же слой N-ой теневой проекции.
2) Программное обеспечение управления аппаратной частью томографа создано для многопоточной работы с блоками устройства, что позволяет одновременно взаимодействовать с несколькими блоками устройства вместо последовательного взаимодействия у прототипа.
3) Программное обеспечение создано для работы в распределенной вычислительной сети любой топологии, что обеспечивает легкое экстенсивное (путем увеличения числа вычислительных блоков) масштабирование производительности системы реконструкции.
4) Программное обеспечение разделено на три независимых части (клиент, сервер, визуализатор) которые позволяют выполнять необходимые действия без использования лишних компонентов устройства, что экономит память и увеличивает стабильность работы устройства.
На фиг. 6 приведен пример восстановленных внутренних структур (3D-изображений) объектов:
а) шуруп;
b) микросхема;
c) конденсатор;
d) материал.
Восстановленные 3D изображения характеризуются высоким качеством (четкостью, контрастностью, геометрической не искаженностью).
По сравнению с известными, предлагаемые способ и устройство имеют лучшие характеристики:
1) высокими точностными характеристиками за счет, во-первых, прецизионного перемещения и вращения объекта при сканировании относительно блока рентгеновского излучения и блока детекторов, во-вторых, перемещения по вертикальной оси скобы, с закрепленной на ней блока рентгеновского излучения и блока детекторов, в-третьих, смещение блоков рентгеновского излучения и детекторов вдоль оптической оси и наклоны этих блоков в вертикальной и горизонтальной плоскостей;
2) высокими точностными характеристиками за счет сжатия, восстановления и анализа трехмерных изображений внутренней структуры объекта, осуществляемым специализированным форматом хранения, извлечения и обработки теневых проекций, введения специальной метрологической калибровки дефектоскопии восстановляемых изображений;
3) повышение производительности вычислительных операций за счет оптимального распределения вычислительной нагрузки на блоки устройства, масштабирования и сокращения времени выполнения операций;
4) расширение функциональных возможностей путем оценки широкого класса дефектов крупногабаритных объектов;
5) расширение функциональных возможностей за счет работы устройства с любой топологией вычислительной системы;
6) высокой точностью работы за счет регулирования температуры блока детекторов путем принудительного жидкостного циркулирования;
7) Высокой точностью работы за счет ступенчатого управления высоковольтным напряжением рентгеновским излучением.
Таким образом, по сравнению с прототипом, предлагаемые способ и устройство обладают повышенной точностью восстановления трехмерной структуры объекта, расширенными функциональными возможностями, улучшенными удобствами работы и исключения опасного рентгеновского излучения для обслуживающего персонала.
Источники информации
1. Лиев А. Х. Сканирующее рентгеновское устройство. Патент RU 94023023 (А1), МПК A61B 6/00, опубл. 1996.05.20.
2. Johnson Roger H., Nelson Alan. United States Patent 5,402,460. Three-dimensional microtomographic analysis system.
3. Малинова П. И. и др. Рентгеновский компьютерный томограф. Заявка на патент RU 2004101619 (А1), МПК A61B 6/00, опубл. 10.07.2005.
4. Способ рентгеновской томографии и устройство для его осуществления. Патент RU 2505800 МПК G01N 23/04, опубл. 27.01.2014.
5. Богомолов Е. Н. и др. Современные методы исследования материалов и нанотехнологий (лабораторный практикум). - Томск: Издательский дом Томского государственного университета, 2013. - 412 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| Способ определения линейных размеров металлических деталей методом рентгеновской компьютерной томографии | 2023 |
|
RU2836775C1 |
| ТРЕХМЕРНАЯ РЕКОНСТРУКЦИЯ ТЕЛА И КОНТУРА ТЕЛА | 2008 |
|
RU2479038C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1993 |
|
RU2072513C1 |
| ПРОЕКЦИЯ МАГНИТНОГО РЕЗОНАНСА ДЛЯ ПОСТРОЕНИЯ ЧЕТЫРЕХМЕРНОЙ ВИЗУАЛИЗАЦИИ | 2015 |
|
RU2658135C1 |
| Способ исследования соединений с натягом с применением ультразвуковой томографии | 2018 |
|
RU2719276C1 |
| МАГНИТОРЕЗОНАНСНАЯ ТОМОГРАФИЯ С ИСПОЛЬЗОВАНИЕМ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ИМПУЛЬСОВ С НУЛЕВЫМ ВРЕМЕНЕМ ЭХО | 2014 |
|
RU2660401C1 |
| ВИЗУАЛИЗАЦИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ В КОМБИНАЦИИ С ДВУМЕРНЫМИ ПРОЕКЦИОННЫМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2471239C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2017 |
|
RU2719024C1 |
Использование: для рентгеновской томографии. Сущность изобретения заключается в том, что облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом восстанавливают изображения по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта, при этом блок рентгеновского излучения и блок детекторов устанавливаются на отдельной скобе, обеспечивающей смещение по вертикальной и горизонтальной осям и смещения блока рентгеновского излучения и блока детекторов вдоль оптической оси, и угловые наклоны в вертикальной и горизонтальной плоскостях блока рентгеновского излучения и блока детекторов, осуществляют сжатие и фильтрацию восстановленных изображений, классифицируют дефекты и распределяют вычислительные операции. Технический результат: повышение точности и быстродействия восстановления и анализа трехмерной структуры объекта, расширение функциональных возможностей, повышение быстродействия работы и обеспечения возможности работы в вычислительной сети любой топологии. 2 н. и 9 з.п. ф-лы, 6 ил. 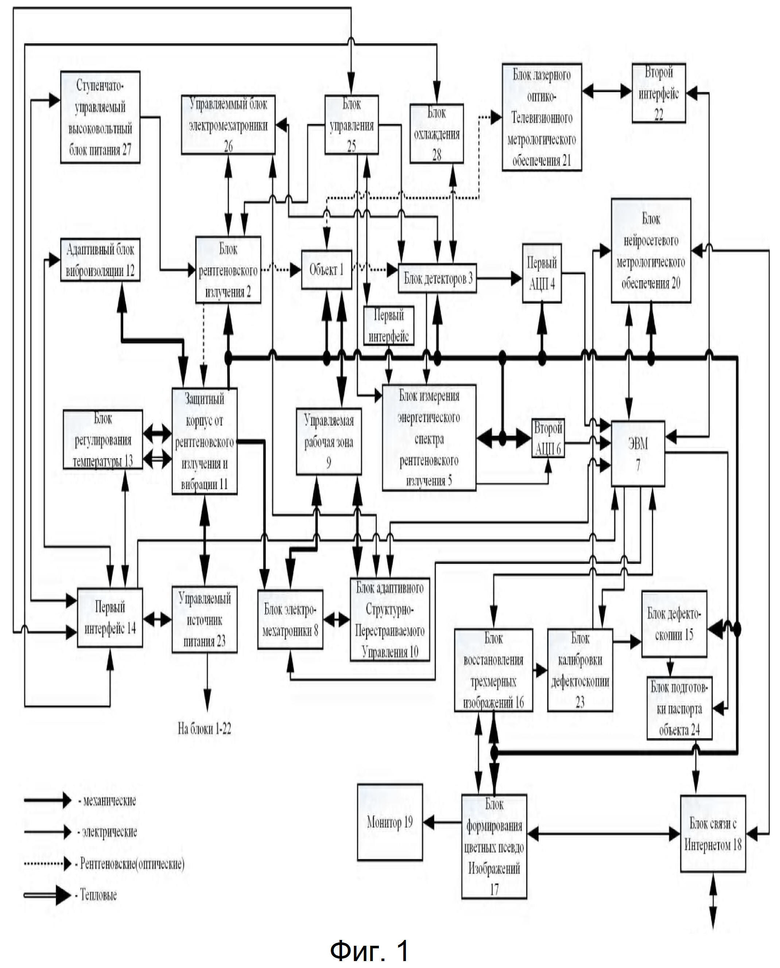
1. Способ рентгеновской томографии, заключающийся в том, что облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом восстанавливают изображение по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта, производят восстановление трехмерного изображения при вращении и смещении объекта по трем взаимно перпендикулярным осям системы координат, связанной с рабочей зоной объекта при корректировке управления последней, а текущие и эталонные интегральные характеристики изображения объекта формируют в виде спектральных и фрактальных признаков, геометрические признаки локальных и интегральных участков изображений объекта определяют в виде периметров, площадей, радиусов, длины, ширины, количества точек перегиба контура, геометрических центров элементов изображений, формируют псевдоцветные изображения внутренней микроструктуры объекта, и уменьшают до безопасного уровня рентгеновское излучение и вибрацию, отличающийся тем, что блок рентгеновского излучения и блок детекторов устанавливают на отдельной скобе, обеспечивающей смещение по вертикальной и горизонтальной осям и смещения блока рентгеновского излучения и блока детекторов вдоль оптической оси, и угловые наклоны в вертикальной и горизонтальной плоскостях блока рентгеновского излучения и блока детекторов, осуществляют сжатие и фильтрацию восстановленных изображений, классифицируют дефекты и распределяют вычислительные операции.
2. Способ по п.1, отличающийся тем, что сжатие восстановленных изображений осуществляют специализированным форматом хранения трехмерных теневых проекций в виде воксельного октодерева, извлечения трехмерных теневых проекций путем распаковки дерева, удаление фоновых шумов на изображениях теневых проекций методом обрезания граничных яркостей по градиентам.
3. Способ по п.1, отличающийся тем, что вычислительные операции производят путем распределения нагрузки на аппаратные блоки, масштабирования и сокращения времени выполнения операций за счет разделения программного обеспечения на три независимых части - клиент, сервер, визуализатор.
4. Способ по п.1, отличающийся тем, что вычислительные операции объединены в виде интегрированной среды, позволяющее управлять и одновременно взаимодействовать с несколькими аппаратными блоками, функционировать в вычислительной сети любой топологии.
5. Устройство рентгеновской томографии, содержащее последовательно соединенные блок рентгеновского излучения, блок детекторов, первый аналого-цифровой преобразователь и электронно-вычислительную машину, к второму входу которой подключен второй аналого-цифровой преобразователь, входом соединенный через блок измерения энергетического спектра рентгеновского излучения с вторым выходом блока детектора, а выход электронно-вычислительной машины подключен к блоку электромеханики, оно также содержит, во-первых, последовательно соединенные двунаправленными линиями, введенными между дополнительными выходами и входами электронно-вычислительной машины, блок восстановления трехмерных изображений, блок формирования цветных псевдоизображений, блок связи с Интернетом, отдельным входом подключенный через блок дефектоскопии к отдельному выходу блока восстановления трехмерных изображений, и блок нейросетевого метрологического обеспечения, во-вторых, содержит управляемую рабочую зону, введенную между выходами и входами объекта и блока электромеханики, отдельными двунаправленными линиями, подключенными через блок адаптивного структурно-перестраиваемого управления, соединенный отдельной двунаправленной связью с управляемой рабочей зоной, к электронно-вычислительной машине, в-третьих, между дополнительными выходом и входом объекта и входами и выходами электронно-вычислительной машины включены блок лазерного оптико-телевизионного метрологического обеспечения и второй интерфейс, соединенные между собой двунаправленными линиями, в-четвертых, содержит защитный корпус от рентгеновского излучения и вибрации, отдельным выходом подключенный к второму выходу блока рентгеновского излучения, а первым выходом подключенный к отдельным входам блока рентгеновского излучения, объекта, блока электромеханики, блока детекторов, блока измерения энергетического спектра рентгеновского излучения, первого аналого-цифрового преобразователя, второго аналогово-цифрового преобразователя, блока нейросетевого метрологического обеспечения, блока дефектоскопии, блока восстановления трехмерных изображений и блока формирования цветных псевдоизображений, а другими двунаправленными линиями соединенным с управляемым источником питания, блока регулирования температуры и адаптивного блока виброизоляции, подключенного отдельными двунаправленными линиями через интерфейс к электронно-вычислительной машине, причем блок регулирования температуры соединен двумя отдельными двунаправленными линиями с первым интерфейсом, а другой отдельной двунаправленной линией соединен с защитным корпусом от рентгеновского излучения и вибрации, кроме того, управляемый источник питания соединен отдельными двунаправленными линиями с интерфейсом, а выходом - со всеми блоками устройства, в-третьих, блок формирования цветных псевдоизображений подключен к монитору, в-четвертых, рабочая зона выполнена в виде мехатронного модуля на основе магнитопроводов-роторов, имеющих возможность смещать исследуемый объект по трем взаимно-перпендикулярным направлениям и разворачивать исследуемый объект вокруг трех взаимно перпендикулярных осей, в-пятых, упомянутый блок адаптивного структурно-перестраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой, в-шестых, упомянутый блок лазерного оптико-телевизионного метрологического обеспечения выполнен в виде триангуляционного измерителя положения исследуемого объекта, в-седьмых, упомянутый блок нейросетевого метрологического обеспечения выполнен в виде адаптивной схемы, содержащей обучаемый слой нейронов и выходной слой нейронов, обеспечивающих калибровку изображений по его четкой или нечеткой кластеризации, в-восьмых, упомянутый блок восстановления трехмерных изображений выполнен в виде последовательных схем захвата теневых проекций, реконструкции виртуальных сечений, создания предварительных сечений и построения 3D-изображения, в-девятых, упомянутый блок дефектоскопии выполнен в виде последовательных схем реконструкции методом пространственной области, градиентным методом, корреляционным методом, методом нейронных сетей и схемы обозначения дефектов, управляемых по запросу пользователя на поиск и анализ дефектов, в-десятых, упомянутый блок формирования цветных псевдоизображений выполнен в виде последовательности схем оценки плотностей слоев 3D-реконструкции, сопоставления псевдоцветов различным слоям 3D-реконструкции и формирования 3D-псевдореконструкции изображений, в-одиннадцатых, упомянутый защитный корпус от рентгеновского излучения выполнен в виде экрана рентгеновского излучения на основе многослойного защитного материала, в-двенадцатых, упомянутый адаптивный блок виброизоляции выполнен в виде пружинно-механических демпферов, в-тринадцатых, упомянутый блок регулирования температуры выполнен в виде адаптивного регулятора температуры внутри корпуса томографа, содержащего воздушную принудительную вентиляцию и водяной отвод тепла, в-четырнадцатых, упомянутый управляемый источник питания выполнен в виде бесперебойного источника питания, содержащего блок аккумуляторов, солнечную батарею и блок питания от электрической сети, отличающееся тем, что дополнительно введены, во-первых, управляемый блок электромеханики, отдельными двунаправленными линиями соединенный с блоком рентгеновского излучения, блоком детекторов и блоком адаптивного структурно-перестраиваемого управления, во-вторых, блок охлаждения, отдельными двунаправленными линиями соединенный с первым интерфейсом и блоком детекторов, в-третьих, ступенчато-управляемый высоковольтный блок питания, двунаправленной линией подключенный к первому интерфейсу, а выходом соединенный с блоком рентгеновского излучения, в-четвертых, блок калибровки дефектоскопии, включенный между выходом блока восстановления трехмерных изображений и входом блока дефектоскопии, причем отдельный вход блока калибровки дефектоскопии подключен к отдельному входу ЭВМ, а отдельный выход блока калибровки дефектоскопии соединен с входом блока нейросетевого метрологического обеспечения, в-пятых, блок подготовки паспорта изделия, введенный между выходом блока дефектоскопии и входом блока связи с Интернетом, причем отдельный вход блока подготовки паспорта изделий подключен к выходу ЭВМ, в-шестых, блок управления, отдельными выходами соединенный с входами блока измерения энергетического спектра рентгеновского излучения, блока рентгеновского излучения и блока детекторов, а входом и выходом подключенный к первому интерфейсу.
6. Устройство по п.5, отличающееся тем, что управляемый блок электромеханики выполнен в виде четырехкоординатного манипулятора.
7. Устройство по п.5, отличающееся тем, что ступенчато-управляемый высоковольтный блок питания выполнен в виде высоковольтного преобразователя с фиксированным установлением напряжения.
8. Устройство по п.5, отличающееся тем, что блок охлаждения выполнен в виде принудительного жидкостного охлаждения путем циркуляции воды или специальной жидкостной смеси.
9. Устройство по п.5, отличающееся тем, что блок калибровки дефектоскопии выполнен в виде накладываемой регулярной сетки на восстановленное 3D изображение, а также учета погрешности оптической системы.
10. Устройство по п.5, отличающееся тем, что блок подготовки паспорта объекта сортирует несплошности или включения по размеру и форме - круг, треугольник, квадрат, трапеция, линии, овал, неправильная структура.
11. Устройство по п.5, отличающееся тем, что блок управления выполнен в виде синхронизатора и установления тестового и рабочего режима работы блока рентгеновского излучения, блока детекторов и блока измерения энергетического спектра рентгеновского излучения.
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| US 2010278440 A1, 04.11.2010 | |||
| US 5119408 A, 02.06.1992 | |||
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТЕЛА | 1990 |
|
SU1811289A1 |
| Способ формирования изображений при компьютерной томографии головы | 1988 |
|
SU1581281A1 |

