Заявляемые изобретения объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, локационных и пеленгационных средствах для определения пеленга на источник априорно неизвестного сигнала.
Известен способ пеленгации радиосигналов (см. Пат. РФ №2263327, МПК G01S 3/14, опубл. 27.10.2005 г., бюл. №30). Он включает прием радиосигналов антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования с согласованным с местными условиями вариантом их размещения на местности, N>2. Измерение в каждом частотном поддиапазоне на совпадающих интервалах времени комплексных спектров пар сигналов для каждой пары антенных элементов, характеризующих фазы каждого радиосигнала, принимаемого в соответствующем частотном поддиапазоне одним из антенных элементов пары, выбранным в качестве сигнального относительно фазы радиосигнала, принимаемого в том же частотном поддиапазоне другим из антенных элементов пары, выбранным в качестве опорного. Определение свертки комплексно сопряженных спектров для каждого частотного поддиапазона. Путем преобразования Фурье определяют разности фаз радиосигналов каждой пары антенных элементов и каждого частотного поддиапазона. Запоминают полученные разности фаз радиосигналов, формируют и запоминают эталонный набор разностей фаз сигналов исходя из пространственного размещения антенных элементов антенной решетки, используемого частотного диапазона и заданной точности измерений. Вычитают из эталонных разностей фаз сигналов соответствующие измеренные значения разностей фаз. Полученные значения невязок возводят в квадрат и суммируют по всем парам антенных элементов и всем частотным поддиапазонам. Запоминают полученные суммы, находящиеся в однозначном соответствии с направлениями прихода радиосигналов. Определяют наиболее вероятное направление прихода радиосигналов по наименьшей сумме квадратов невязок.
Способ-аналог позволяет повысить точность пеленгования радиосигналов за счет более полного использования информации об электромагнитном поле.
В качестве основного недостатка аналога следует отметить его низкое быстродействие, связанное со значительными временными затратами на поиск минимальной суммы.
Наиболее близким по технической сущности к предлагаемому способу является способ пеленгации радиосигналов по Пат. РФ №2341811, МПК G01S 3/14. Способ пеленгации радиосигналов и пеленгатор для его осуществления. Опубл. 20.12.2008 г., бюл. №35. Он включает прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈ΔF, ν=1,2,…,V, V=ΔF/Δf, антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованным с местными условиями вариантом размещения, последовательное синхронное преобразование высокочастотных сигналов каждой пары антенных элементов антенной решетки в электрические сигналы промежуточной частоты, дискретизацию их и квантование, формирование из них четырех последовательностей отсчетов путем разделения на квадратурные составляющие, запоминание в каждой последовательности заданного числа В отсчетов квадратурных составляющих сигналов, коррекцию запомненных отсчетов последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формирование из скорректированных последовательностей квадратурных составляющих отсчетов сигналов двух комплексных последовательностей отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов, преобразование обеих комплексных последовательностей отсчетов сигналов с помощью дискретного преобразования Фурье, попарное перемножение отсчетов сигнала преобразованной последовательности одного антенного элемента Al на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Ah, l,h=1,2,…,M; l≠h, расчет для текущей пары антенных элементов разности фаз сигналов Δφl,h(fν)=arctg(Uc(fν)/Us(fν)) и взаимной мощности сигналов Pl,h(fν)=|Uc(fν)·Us(fν)| для каждого частотного поддиапазона, запоминание полученных результатов Δφl,h(fν) Δφl,h(fν), и Pl,h(fν), формирование и запоминание эталонного набора разностей фаз сигналов исходя из пространственного размещения антенных элементов антенной решетки, используемого частотного диапазона и заданной точности измерений, вычитание из эталонной разности фаз сигналов соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок и их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, запоминание полученных сумм, находящихся в однозначном соответствии с направлениями прихода радиосигналов, определение наиболее вероятного направления прихода радиосигналов в горизонтальной и вертикальной плоскостях по наименьшей сумме квадратов невязок, одновременное определение суммарной мощности сигналов Р(fν) путем суммирования взаимных мощностей по всем парам антенных элементов для каждого частотного поддиапазона Δfv, запоминание значений суммарной мощности сигнала, вычисление среднего значения мощности сигнала 


Способ-прототип по сравнению с аналогом обеспечивает повышение точности пеленгации радиосигналов в сложной сигнально-помеховой обстановке, когда спектры сигналов от различных источников граничат в частотной области или частично перекрываются.
Однако способу-прототипу присущ существенный недостаток - значительное время обработки сигналов, что ограничивает область его применения. Данный недостаток способа обусловлен двухканальностью выполнения операций измерения разности фаз Δφl,h(fν) для используемых пар антенных элементов антенной решетки (последовательное выполнение операций измерения Δφl,h(fν)), а также применением метода случайного поиска глобального экстремума (минимальной суммы квадратов невязки).
Наиболее близким по технической сущности к предлагаемому устройству является пеленгатор по Пат. РФ №2341811, МПК G01S 3/14. Способ пеленгации радиосигналов и пеленгатор для его осуществления. Опубл. 20.12.2008 г., бюл. №35. Устройство-прототип содержит антенную решетку, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования и согласованным с местными условиями вариантом размещения, антенный коммутатор, N входов которого подключены к соответствующим N выходом антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорными входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений разностей фаз, блок вычисления первичных пространственно-информационных параметров, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй вход - с опорным выходом блока преобразования Фурье, первая группа информационных выходов блока вычисления первичных пространственно информационных параметров соединена с группой информационных входов второго запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с информационными выходами первого запоминающего устройства, информационные входы которого соединены с информационными выходами блока формирования эталонных значений разностей фаз, группа информационных входов которого является первой установочной шиной пеленгатора, последовательно соединенные умножитель, первый сумматор, третье запоминающее устройство, блок определения азимут и угла места, причем первая и вторая группы информационных входов умножителя объединены и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, первого сумматора, блока определения азимута и угла места, блока формирования эталонных значений разностей фаз и блока вычисления первичных пространственно-информационных параметров, четвертое, пятое и шестое запоминающие устройства, блок элементов "И", первый, второй и третий счетчики импульсов, второй сумматор, делитель, первый и второй блоки сравнения, блок определения средней частоты сигнала и цифровой полосовой фильтр, выполненный двухканальным, причем первый и второй сигнальные входы цифрового полосового фильтра соединены с выходами сигнального и опорного каналов аналого-цифрового преобразователя соответственно, а первый и второй сигнальные выходы соединены соответственно с сигнальным и опорным входами блока преобразования Фурье, последовательно соединенные первый счетчик, пятое запоминающее устройство, второй сумматор, делитель, шестое запоминающее устройство и первый блок сравнения, причем счетный вход первого счетчика импульсов объединен с входами синхронизации пятого запоминающего устройства, второго сумматора, цифрового полосового фильтра и выходом генератора синхроимпульсов, а выход обнуления первого счетчика импульсов соединен со входами управления второго сумматора и делителя, входами синхронизации шестого запоминающего устройства и первого блока сравнения, и счетным входом второго счетчика импульсов, группа информационных выходов которого соединены с первой группой информационных входов блока определения средней частоты сигнала и с соответствующими вторыми входами блока элементов "И", первые входы которого объединены и соединены с выходом первого блока сравнения, а выходы блока элементов "И" соединены с группой адресных входов четвертого запоминающего устройства, первая и вторая группы информационных входов которого соединены с первой и второй группами информационных выходов блока определения азимута и угла места, а первая и вторая группы информационных выходов четвертого запоминающего устройства являются соответственно первой и второй выходными шинами пеленгатора, вторая установочная шина которого соединена со второй группой информационных входов первого блока сравнения, группа информационных входов второго блока сравнения объединена со второй входной шиной пеленгатора, первый выход второго блока сравнения соединен со счетным входом третьего счетчика импульсов, а второй выход - со входом обнуления третьего счетчика импульсов, группа информационных выходов которого соединена со второй группой информационных входов блока определения средней частоты сигнала, группа информационных выходов которого соединена с группами входов управления цифрового полосового фильтра и двухканального приемника.
Целью заявляемых технических решений является существенное сокращение временных затрат на оценивание пространственных параметров сигналов источников радиоизлучений при сохранении или незначительном увеличении ошибки измерений.
Поставленная цель достигается тем, что в известном способе пеленгации радиосигналов, включающем прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈ΔF, ν=1,2,…,F, V=ΔF/Δf, антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованным с местными условиями вариантом размещения, последовательное синхронное преобразование высокочастотных сигналов каждой пары антенных элементов антенной решетки в электрические сигналы промежуточной частоты, дискретизацию их и квантование, формирование из них четырех последовательностей отсчетов путем разделения на квадратурные составляющие, запоминание в каждой последовательности заданного числа В отсчетов квадратурных составляющих сигналов, коррекцию запомненных отсчетов последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формирование из скорректированных последовательностей квадратурных составляющих отсчетов сигналов двух комплексных последовательностей отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов, преобразование обеих комплексных последовательностей отсчетов сигналов с помощью дискретного преобразования Фурье, попарное перемножение отсчетов сигнала преобразованной последовательности одного антенного элемента на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Al,h, l,h=1,2,…,M; l≠h, расчет для текущей пары антенных элементов разности фаз сигналов φl,h,изм(fν)=arctg(Uc(fν)/Us(fν)) для каждого частотного поддиапазона, запоминание полученных результатов Δφl,h,изм(fν), формирование и запоминание эталонного набора разностей фаз сигналов исходя из пространственного размещения антенных элементов антенной решетки, используемого частотного диапазона и заданной точности измерений, вычитание из эталонной разности фаз сигналов соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок и их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, запоминание полученных сумм H(fν), находящихся в однозначном соответствии с направлениями прихода радиосигналов, определение наиболее вероятного направления прихода радиосигналов.
Осуществляют последовательное синхронное преобразование высокочастотных сигналов одновременно всех N антенных элементов (АЭ) антенной решетки (АР) в электрические сигналы промежуточной частоты, одновременную дискретизацию их и квантование. Формируют из них 2N последовательностей отсчетов путем разделения на квадратурные составляющие с последующим их преобразованием в скорректированные последовательности квадратурных составляющих сигнала. Одновременно из всех скорректированных последовательностей квадратурных составляющих сигналов формируют N комплексных последовательностей сигналов с последующим преобразование их с помощью дискретного преобразования Фурье. Далее одновременно попарно для соответствующих частот выполняют комплексно сопряженное перемножение отсчетов сигнала преобразованных последовательностей используемых в обработке пар антенных элементов Aj,h. После этого одновременно для всех N·[N-1)/2 пар антенных элементов рассчитывают разности фаз сигналов для каждого частотного поддиапазона с последующим их запоминанием и формированием массива невязок. Здесь N·(N-1)/2 - количество неповторяющихся пар антенных элементов антенной решетки, используемых в обработке. Для каждой пары антенных элементов на основе измеренных значений Δφl,h,изм(fν) формируют конечное семейство пространственных описаний конусов возможных направлений на источник и далее набора взаимно непересекающихся окружностей направлений, полученных в результате пересечения семейством конусов направлений удаленной сферы. Запоминают точки пересечения окружностей направлений от разных пар антенных элементов, определяют значения сумм квадратов невязок Н(fν) для точек пересечения окружностей направлений. Определяют минимальное minH(fν) из выбранных значений функции H(Fν). Далее выполняют локальную оптимизацию minH(fν) путем сравнения с ближайшими к нему значениями сумм квадратов невязок. Определяют наиболее вероятное направление прихода радиосигнала по наименьшей сумме квадратов невязок.
Благодаря новой совокупности существенных признаков (одновременной оценке ППИП сигналов, принимаемых всеми N антенными элементами и оптимизации алгоритма поиска глобального экстремума) достигается существенное уменьшение временных затрат на определение пространственных параметров сигналов, что и обусловило положительный эффект.
В заявляемом пеленгаторе поставленная цель достигается тем, что пеленгатор, содержащий антенную решетку, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования с согласованными с местными условиями вариантом размещения, генератор синхроимпульсов, первое запоминающее устройство и блок формирования эталонных значений разности фаз (ФЭЗРФ), группа информационных входов которого является первой установочной шиной пеленгатора, последовательно соединенные радиоприемное устройство, аналого-цифровой преобразователь, блок преобразования Фурье, блок вычисления первичных пространственно-информационных параметров (ППИП), второе запоминающее устройство, блок вычитания, умножитель, сумматор и третье запоминающее устройство, причем группа входов уменьшаемого блока вычитания соединена с группой информационных выходов первого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока ФЭЗРФ, а выход генератора синхроимпульсов соединен со входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычисления ППИП, первого, второго и третьего запоминающих устройств, блока ФЭЗРФ, блока вычитания, умножителя и сумматора, дополнительно введены последовательно соединенные блок формирования пространственного описания конусов и окружностей направлений, блок определения точек пересечения окружностей направлений и блок поиска глобального экстремума, причем N групп информационных входов блока формирования пространственного описания конусов и окружностей направлений соединены с соответствующими N группами информационных выходов блока вычисления ППИП, N·(N-1)/2+1-я группа информационных входов соединена со второй группой информационных выходов радиоприемного устройства, а N·(N-1)/2+2-я группа информационных входов является второй установочной шиной пеленгатора, вторая группа информационных входов блока определения точек пересечения окружностей направлений является третьей установочной шиной пеленгатора, вторая группа информационных входов блока поиска глобального экстремума соединена с группой информационных выходов третьего запоминающего устройства, а первая группа информационных входов объединена с группой адресных входов третьего запоминающего устройства, группа информационных выходов блока поиска глобального экстремума является выходной шиной пеленгатора, входы синхронизации блока формирования пространственного описания конусов и окружностей направлений, блока определения точек пересечения окружностей направлений и блока поиска глобального экстремума соединены с выходом генератора синхроимпульсов, а радиоприемное устройство, аналого-цифровой преобразователь и блок преобразования Фурье выполнены N-канальными, а блок вычисления ППИП, блок вычитания, умножитель и сумматор N·(N-1)/2 - канальными, группа из N информационных входов радиоприемного устройства соединена с соответствующими выходами N антенных элементов антенной решетки.
Заявляемые способ и устройство поясняются чертежами, на которых:
на фиг.1 представлена структурная схема пеленгатора;
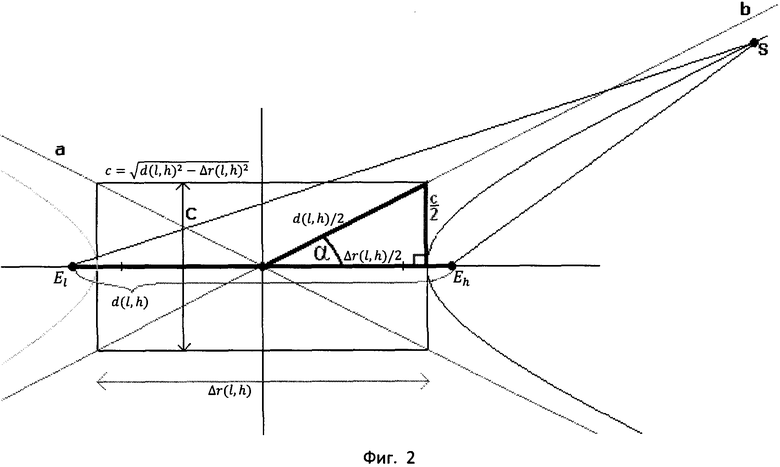
на фиг.2 иллюстрируется сечение двухполосного гиперболоида вращения плоскостью;
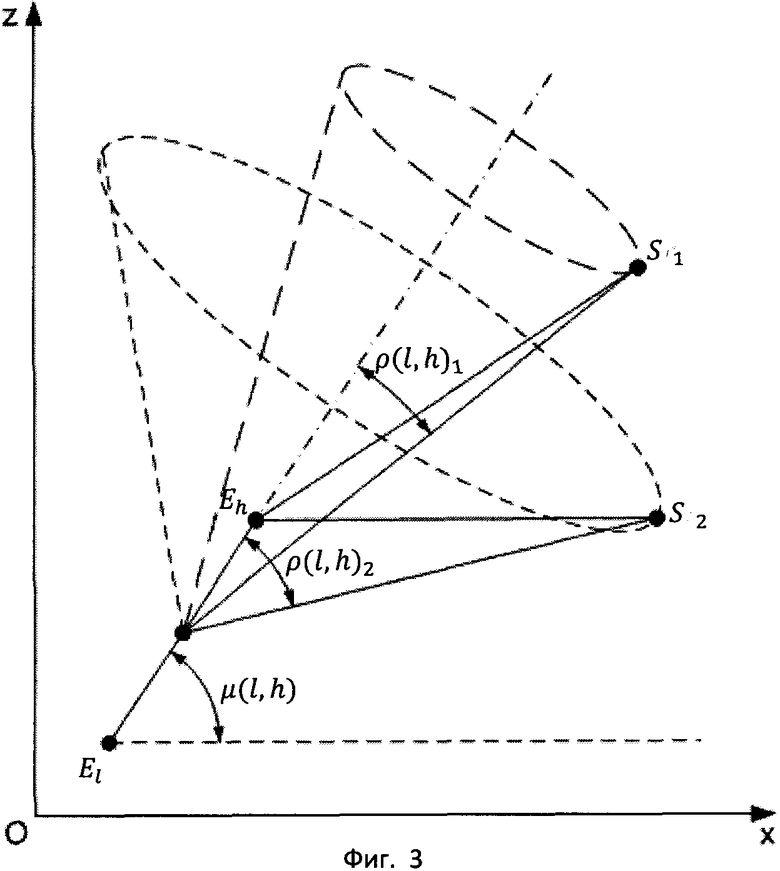
на фиг.3 приведены конусы возможных направлений;
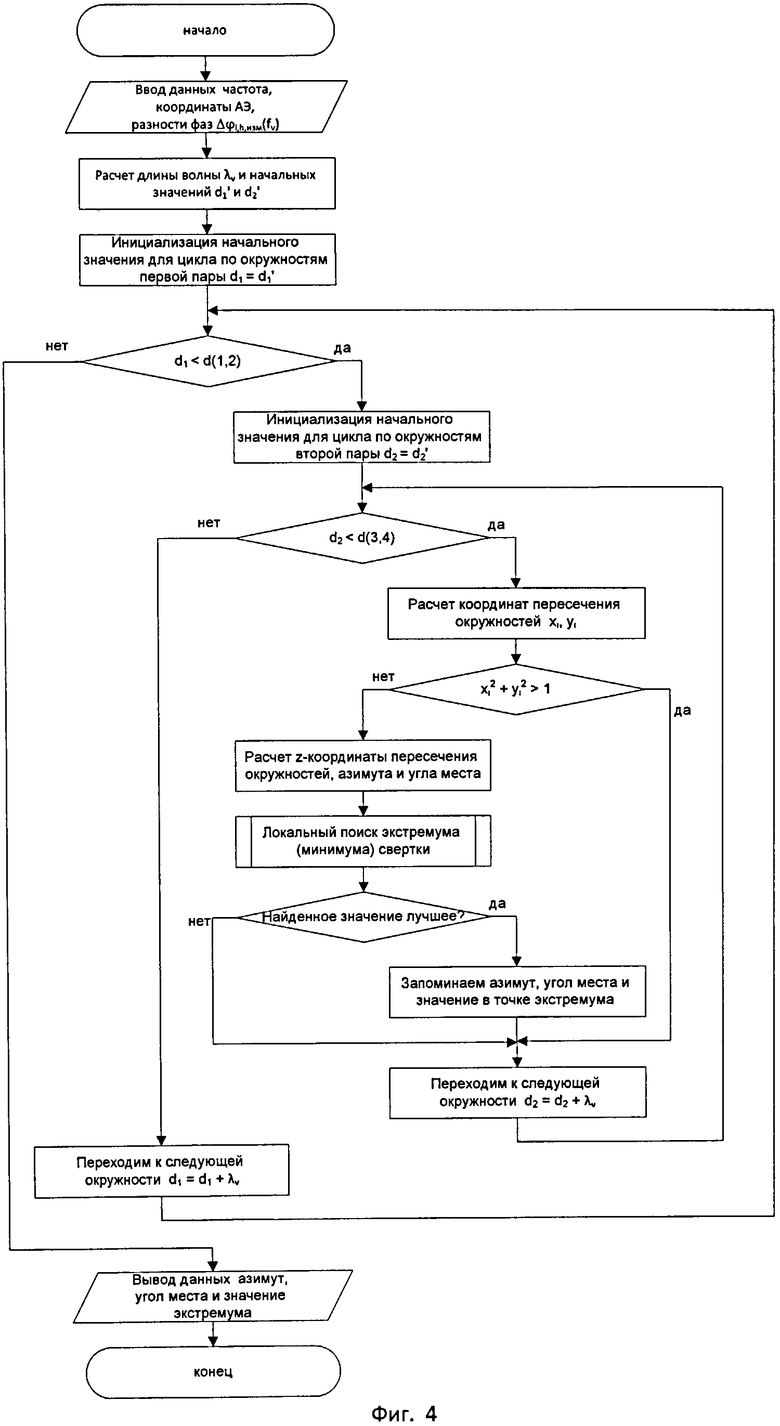
на фиг.4 показан алгоритм определения пространственных параметров на основе метода пересечения окружностей направлений при использовании двух пар антенных элементов;
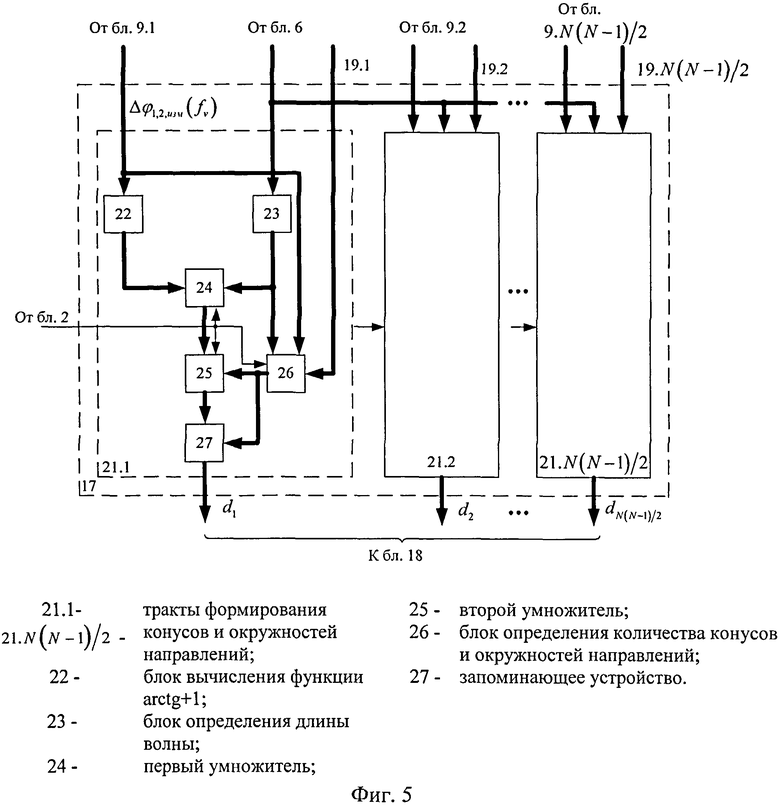
на фиг.5 представлена структурная схема блока формирования конусов и окружностей направлений;
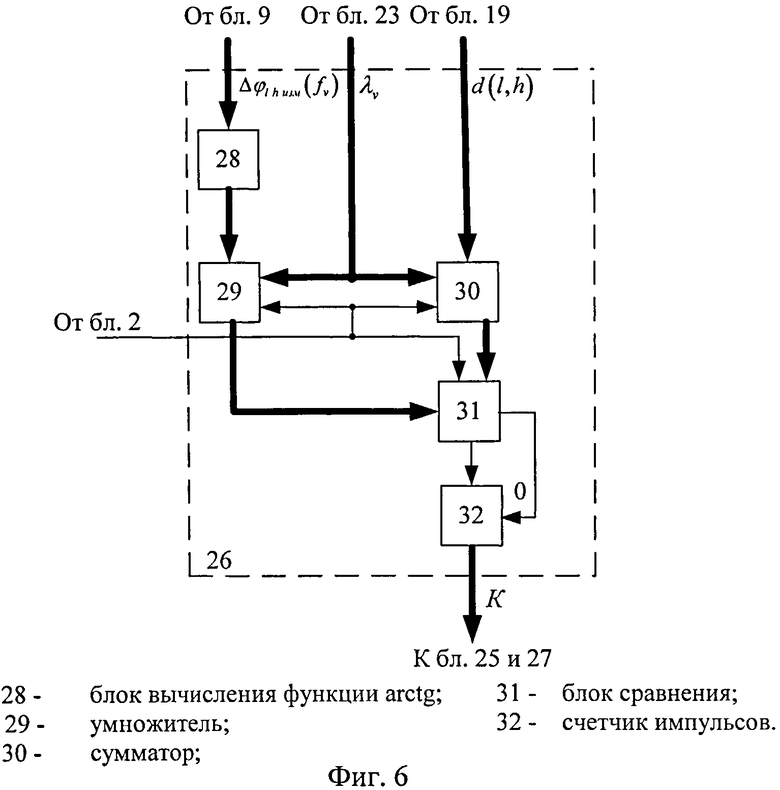
на фиг.6 приведена структурная схема блока определения количества конусов и окружностей направлений;
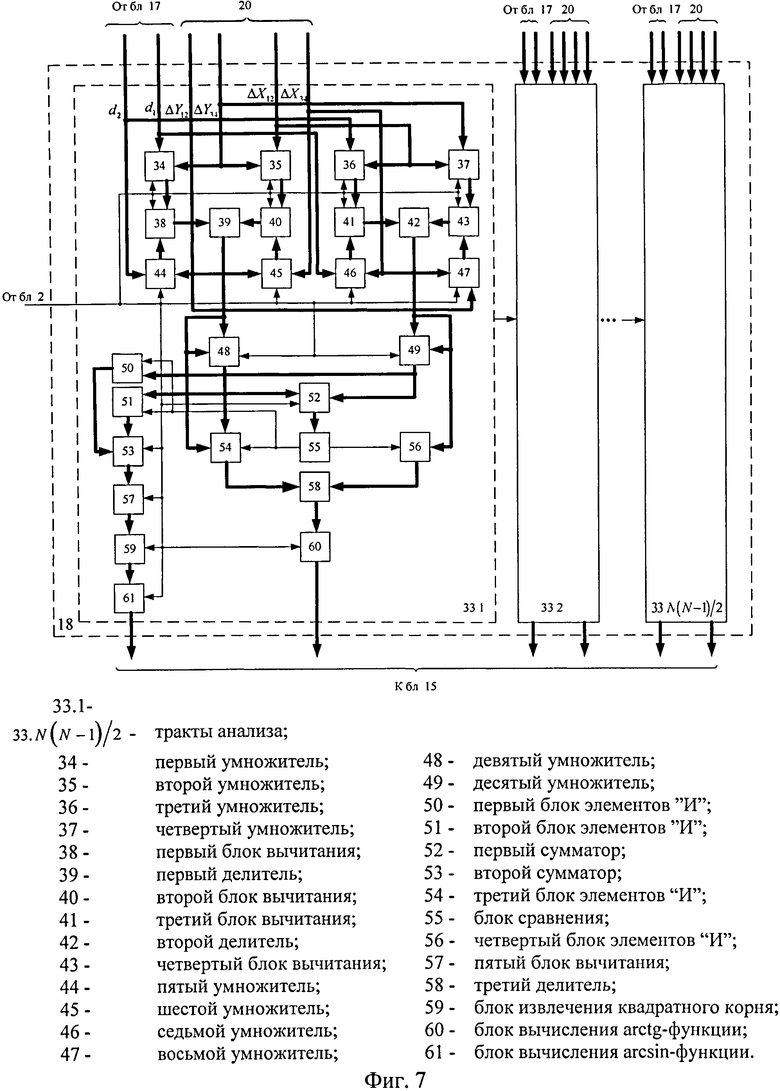
на фиг.7 иллюстрируется структурная схема блока определения точек пересечения окружностей;
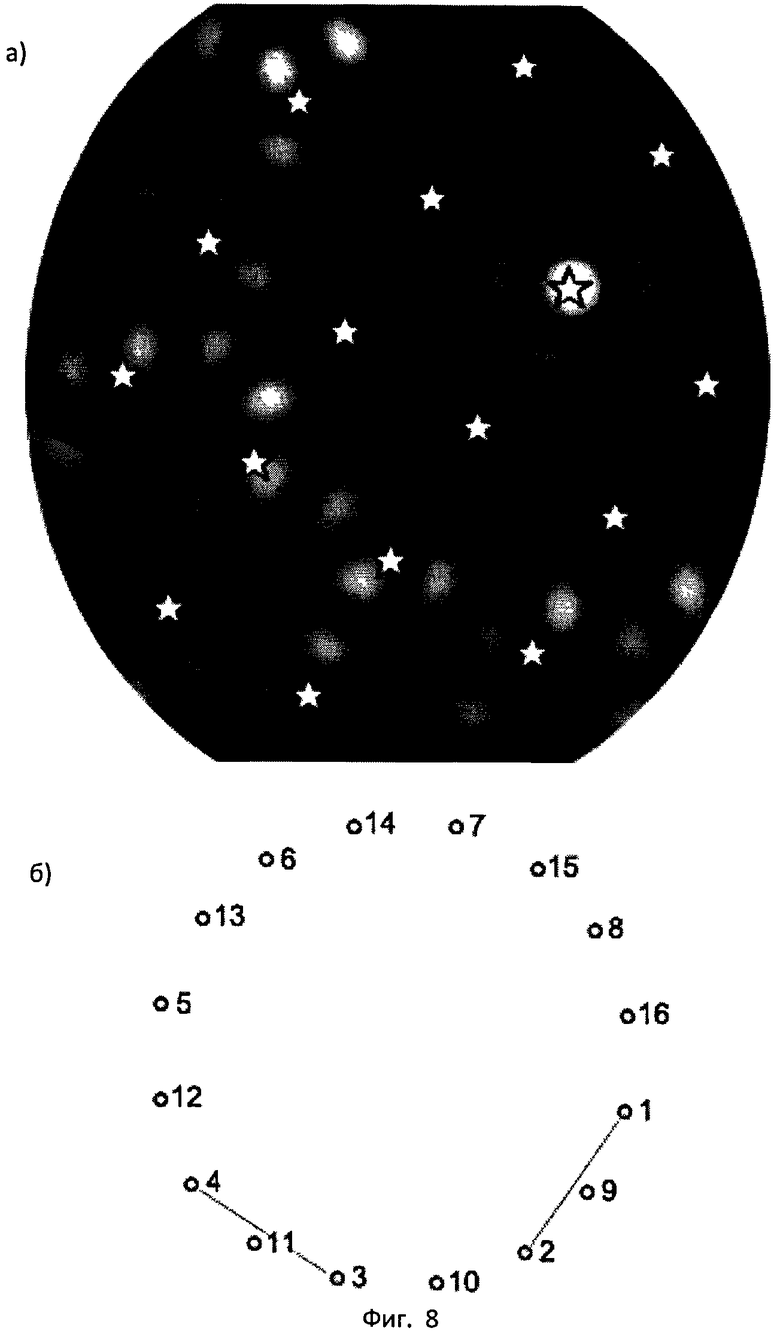
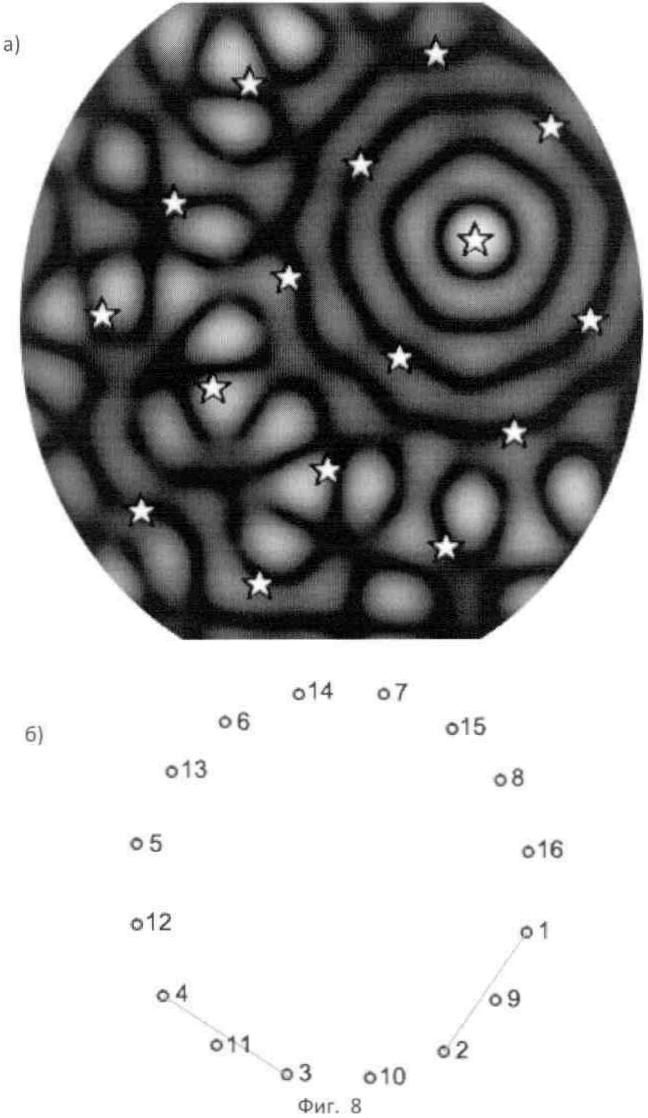
на фиг.8а приведены точки пересечения окружностей направлений (звездочки), совмещеные с графиком функции корреляции для выбранных пар АЭ;
на фиг.8б показаны используемые при анализе пары АЭ.
Современный уровень развития радиосвязи характеризуется широким использованием помехозащищенных видов передач: широкополосных, с псевдослучайной перестройкой рабочей частоты (ППРЧ) и др., сложных видов модуляции сигналов и их различных комбинаций. Большинству из названных систем присуще кратковременное пребывание излучений на частотной позиции (от сотен миллисекунд до десятков микросекунд). В этих условиях в качестве одной из важнейших характеристик радиопеленгаторов выступает их быстродействие (минимальные временные затраты на измерение пространственных параметров ПРИ). В известных аналогах (см. Пат. РФ №№ 2263327, 2283505, 2296341, 2327186 и др.) и прототипе (Пат. РФ №2341811) задача определения направления на источник радиоизлучения решается путем измерения разности фаз Δφl,h,изм(fν) принимаемых сигналов в пространственно разнесенных антенных элементах антенной решетки на основе алгоритма фазового интерферометра (см. Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981.-298p). Из совокупности значений измеренных параметров, взаимных удалений антенных элементов и номинала частоты радиоизлучения формируется некоторая параметрическая решающая функция, аргументом которой является орт направления на источник. Наиболее вероятное направление на ИРИ определяется ортом, при котором данная функция принимает экстремальное (минимальное) значение. Поиск глобального минимума данного вида не имеет аналитического решения и осуществляется численными методами. Наиболее точное решение может быть получено при полном переборе бесконечной области допустимых значений направлений на источник.
Применяемый в прототипе и аналоге метод случайного поиска (см. Бойко И.В., Бублик Б.Н., Зинько П.Н. Методы и алгоритмы решения задач оптимизации. - Киев: Вища шк., 1983. - 512 с.) дает удовлетворительные результаты по точности решения, однако объем выполняемых при этом вычислений настолько велик, что по временным затратам соизмерим с длительностью современных видов передач.
В предлагаемых способе и устройстве решение поставленной задачи осуществляется по двум направлениям:
обеспечением многоканальности при измерении фазовых параметров Δφl,h,изм(fν) оцениваемых сигналов ИРИ;
оптимизацией процедуры поиска точек экстремумов многопараметрической функции Р(fν).
Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе выполняются следующие операции.
Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых f определяются минимальной шириной пропускания приемных трактов пеленгатора. Поддиапазоны, количество которых V=ΔF/Δf нумеруют ν=1,2,…,V. Рассчитывают средние частоты всех поддиапазонов по формуле fν=Δf(2ν-1)/2.
На следующем этапе рассчитывают эталонные значения первичных пространственно-информационных параметров (ППИП) для средних частот всех поддиапазонов fν. В качестве первичных пространственно-информационных параметров используют значения разностей фаз сигналов Δφl,h(fν) для всех возможных парных комбинаций антенных элементов в рамках антенной решетки.
Вводят топологию антенной системы (АС) пеленгатора. Данные по топологии АС включают значения взаимных расстояний между антенными элементами решетки и ее ориентацию относительно направления на север. В качестве последнего возможно использование вектора, проходящего от второго АЭ в направлении первого АЭ (при кольцевой структуре антенной решетки).
В процессе расчета эталонных первичных пространственно-информационных параметров моделируют размещение эталонного источника поочередно вокруг антенной решетки пеленгатора с дискретностью Δθk и Δβc на удалении нескольких длин волн. При этом полагается, что фронт приходящей волны плоский. Для каждого углового параметра Δθk, k=1, 2, …, K и Δβc, с=1,2,…, С вычисляют значение разностей фаз Δφl,h,эm(fν) для всех возможных комбинаций пар антенных элементов решетки и всех частотных поддиапазонов V:

где

расстояние между плоскими фронтами волны в l-ном и h-ном антенных элементах, пришедших к решетке под углом Δθk в азимутальной и Δβc в вертикальной плоскостях, l≠h; xl,yl,,zl и xh,yh,zh - координаты l-го и h-го антенных элементов решетки, С' - скорость света. В случае использования антенной решетки с плоским (горизонтальным) размещением АЭ (zl=zh) последнее выражение примет вид:

Полученные в результате измерений эталонные значения ППИП Δφl,h,эm(fν) оформляются в виде эталонного массива данных.
При обнаружении сигнала в заданной полосе частот формируют массив измеренных ППИП Δφl,h,изм(fν), структура представления информации в которых аналогична. Для этого в пеленгаторе все измеренные значения Δφl,h,изм(fν) для всех сочетаний пар антенных элементов Al,h для всех V частотных поддиапазонов оформляют в соответствующий массив ППИП.
Выполнение всех операций измерений в предлагаемом способе пеленгации осуществляется параллельно по N каналам, чем обеспечивается повышение быстродействия пеленгатора. Кроме того, одновременное измерение Δφl,h,изм(fν) позволяет повысить точность оценивания ППИП и как следствие, точность измерения θ и β. Аналогично способу-прототипу последовательно для всех направлений Δθk, k=1, 2,…, К; КΔθk=2π и всех углов места Δβc, с=1,2,…, С, СΔβc=π/2, вычисляют разность между эталонными Δφl,h,эm(fν) и измеренными Δφl,h,изм(fν) ППИП, которые возводятся в квадрат и суммируют в соответствии с выражением

Определение наиболее вероятного направления прихода радиосигнала в горизонтальной и угломестной плоскостях осуществляется путем поиска наименьшей суммы minH(fν) квадратов невязок среди H(fν) для все V частотных поддиапазонов. Объем проводимых при этом вычислений в прототипе настолько велик, что по временным затратам соизмерим с длительностью современных видов передач. В связи с этим для сокращения временных затрат предлагается использование упорядоченного перебора значений H(fν) на основе метода пересечения окружностей (см. Дронь В.О., Наумов А.С. Сокращение объема вычислений при случайном поиске в задачах пеленгования //Научно-технические ведомости СПбГТУ, №5(65), 2008. Информатика. Телекоммуникации. Управление. - Издательство Политехнического университета, Санкт-Петербург, 2008г.).
Рассмотрим пару антенных элементов Al и Ah (см. фиг. 2), расстояние между которыми обозначим через d(l,h). Обозначим расстояние между источником излучения S и Al через rl, а от S до Ah через rh. Известно, что геометрическое место точек таких, что модуль разности расстояний |Δr(l,r)|=|rl-rh| от них до элементов 4 и 4, представляет собой двухполосный гиперболоид вращения, фокусами которого являются точки размещения Al и Ah на плоскости (см. Справочник по математике для инженеров и учащихся втузов. Бронштейн И.Н., Семендяев К.А. - М.: Наука. Главная редакция физико-математической литературы. 1981, стр. 247-251). Таким образом, если известна разность расстояний Δr(l,h), то источник S должен лежать на данном гиперболоиде.
На фиг. 2 приведено сечение данного гиперболоида плоскостью OXZ, представляющее собой гиперболу. Ее асимптотами являются прямые а и b, a углы между этими прямыми и прямой (Al Ah) определяется из выражения
α=arccos (Δr(l,h)/d(l,h)).
При вращении асимптот гиперболы вокруг ее оси (прямой (Al Ah)) образуется конус вращения, который является асимптотическим по отношению к гиперболоиду вращения. Поскольку расстояние до источника S много больше Δr(l,h), справедливо утверждение, что при известном значении Δr(l,h) источник S находится на построенном таким образом пространственным конусе. Лучи, исходящие из его вершины определяют все возможные направления на S.
Известно, что Δφl,h,изм(fν) определяется, как правило, с точностью до 2π (dφ(l,h)=Δφl,h,изм(fν)+2πk), в связи с чем возникает необходимость в нахождении Δr(l,h). Здесь dφ(l,h)=2π/λνΔr(k=l,h), λν=1/fν. Исходя из того, что разность расстояний Δr(l,h) не может превышать по модулю расстояния между элементами AC d(1,h) (|Δr(l,h)|≤d(l,h)), вытекает следующее ограничение

Из рассмотрения (5) видно, что для каждой пары антенных элементов (Al Ah) можно получить конечное семейство пространственного описания конусов возможных направлений на источник S. Примеры различных конусов на два источника S1 и S2 приведены на фиг. 3. Обозначим образующий угол k'-го конуса через ρ(l,h)k' для пары АЭ l и h. Тогда ρ(l,h)k определяется из выражения

Поскольку источник S удален от антенны на расстояние, которое много больше размеров АС, будем считать, что все конусы имеют общую вершину в точке О. Тогда все конусы задаются величиной µ(l,h) (это угол поворота оси симметрии конуса относительно оси ОХ), а образующие углы - ρ(l,h)k' (см. фиг.3). Среди конусов для каждой пары АЭ (Al Ah) есть только один истинный конус, на котором действительно расположен источник S.
Пусть источник S находится на значительном удалении R от антенны, то есть на сфере радиусом R. Пересечение семейства конусов с этой сферой дает набор пространственного описания взаимно не пересекающихся окружностей направлений. Среди последних лишь одна является истиной (на которой действительно располагается источник 5).
Если рассмотреть точки пересечения всех окружностей направлений из первого набора со всеми окружностями направлений из второго, то одна из них будет являться истинной при отсутствии ошибок измерений и вычислений. В этом случае достаточно было бы для каждой из точек пересечений выбрать соответствующие им суммы квадратов невязок H(fν) и определить среди них точку с минимальной величиной minH(fν).
Поскольку ошибки в исходных данных есть, значения H(fν) во всех точках будут больше теоретического минимума. Однако точка пересечения с минимальным значением minH(fv) с высокой вероятностью находится достаточно близко к истинной. Уменьшение влияния ошибок в исходных данных достигается увеличением количества используемых в обработке пар АЭ вплоть до всех возможных их сочетаний.
Дальнейшее повышение точности измерений пространственных параметров θ и β достигается благодаря выполнению локальной оптимизации значений minH(fν) путем сравнения minH(fν) с ближайшими к нему суммами квадратов невязки H(fν). За наиболее вероятное направление прихода радиосигнала принимают значения θ и β, соответствующие минимальной сумме квадратов невязки minH(fν)onm.
На основе моделирования выполнен сравнительный анализ методов случайного поиска и поиска по пересечениям окружностей направлений. Во всех случаях моделировались комплексные напряжения для всех точек с шагом Δθ и Δβ в один градус (по азимуту от 30° до 150°, по углу места от -30° до 30°). При этом в результаты измерений фазы Δφl,h,изм(fν) вносились случайные ошибки с нулевым смещением и средним квадратическим отклонением 15°.
Для определения промаха между истинным направлением и полученным в результате работы конкретного алгоритма использовалась обычная евклидова норма d=||x||2. Ситуация, когда d>2°, определялась как выброс. В качестве основного оцениваемого параметра использован процент выбросов и временные затраты на измерение пространственных параметров.
Длина волны радиосигнала λν (порядка 30% и 15% от характерного размера АС) подбиралась таким образом, чтобы процент выбросов был порядка единиц. В табл. 1 приведены результаты моделирования.
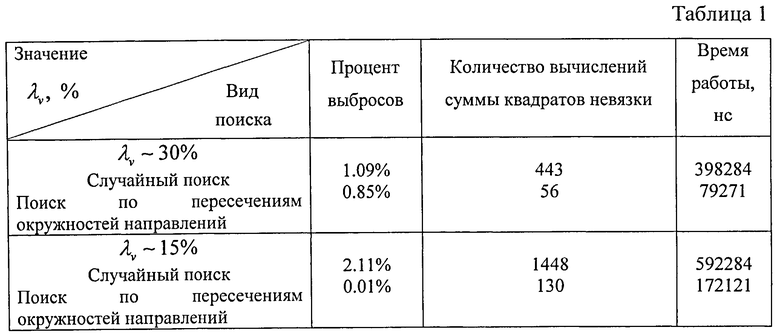
Из рассмотрения табл. 1 видно, что предлагаемый способ пеленгации радиосигналов при тех же точностных характеристиках дает выигрыш по скорости работы в несколько раз. Использование многоканального измерителя ППИП Δφl,h,изм(fν) значительно увеличивает положительный эффект.
Результаты практических испытаний совпали с приведенными в табл. 1 характеристиками.
Количество используемых в обработке пар антенных элементов и их взаимное расположение определяет важнейшие характеристики алгоритма. Уменьшение количества используемых пар АЭ вместо всех возможных приводит к незначительному падению точности измерений θ и β при многократном выигрыше в скорости. Моделирование и практические испытания показали, что целесообразно выбирать пары АЭ, которые образуют между собой угол близкий к прямому.
Кроме того, выполненный анализ свидетельствует о том, что:
- чем больше расстояние между парой элементов, тем больше окружностей направлений для этой пары формируется, что увеличивает временные затраты алгоритма;
- с другой стороны, чем меньше база (расстояние между АЭ пары), тем больше вносимая ошибка измерений отражается на результате.
Поэтому при выборе используемых антенных пар требуется определить оптимальное расстояние между элементами пары при заданной длине волны λν для устойчивой работы устройства, а также зная оптимальную базу, сформировать требуемые пары АЭ.
На фиг. 8а изображен график функции корреляции, спроецированной на плоскость антенной системы. Более темные участкам соответствуют большим значениям суммы квадратов невязки H(fν), более светлые - меньшим. В этот график добавлены точки пересечения окружностей направлений от двух пар антенных элементов, которые условно обозначены символами "звезда". На фиг. 86 приведена конфигурация АС и указаны выбранные пары АЭ (1-2) и (3-4). В данном случае выбор пар произведен удачно. Во-первых, отрезки соединяющие соответствующие АЭ близки по длине и расположены под углом, близким к прямому, что привело к равномерному распределению точек пересечения окружностей. Во-вторых, длины этих отрезков хорошо согласуются с длиной волны источника, что дает оптимальное количество точек пересечения окружностей (увеличение точек привело бы к росту времени расчета, уменьшение точек привело бы к увеличению вероятности не попасть в область истинного минимума).
Пеленгатор (см. фиг.1) содержит антенную решетку 5, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования с согласованным с местными условиями вариантом размещения, генератор синхроимпульсов 2, первое запоминающее устройство 4 и блок формирования эталонных значений разности фаз (ФЭЗРФ) 3, группа информационных входов которого является первой установочной шиной 1 пеленгатора, последовательно соединенные радиоприемное устройство 6, аналого-цифровой преобразователь 7, блок преобразования Фурье 8, блок вычисления первичных пространственно-информационных параметров (ППИП) 9, второе запоминающее устройство 10, блок вычитания 11, умножитель 12, сумматор 13 и третье запоминающее устройство 14, причем группа входов уменьшаемого блока вычитания 11 соединена с группой информационных выходов первого запоминающего устройства 4, группа информационных входов которого соединена с группой информационных выходов блока ФЭЗРФ 3, а выход генератора синхроимпульсов 2 соединен со входами синхронизации аналого-цифрового преобразователя 7, блока преобразования Фурье 8, блока вычисления ППИП 9, первого 4, второго 10 и третьего 14 запоминающих устройств, блока ФЭЗРФ 3, блока вычитания 11, умножителя 12 и сумматора 13.
Для обеспечения существенного сокращения временных затрат на оценивание пространственных параметров сигналов источников радиоизлучений при сохранении или незначительном увеличении ошибки измерений дополнительно введены последовательно соединенные блок формирования пространственного описания конусов и окружностей направлений 17, блок определения точек пересечения окружностей направлений 18 и блок поиска глобального экстремума 15, причем N групп информационных входов блока формирования пространственного описания конусов и окружностей направлений 17 соединены с соответствующими N группами информационных выходов блока вычисления ППИП 9, N·(N-1)/2+1-я группа информационных входов соединена со второй группой информационных выходов радиоприемного устройства 6, а N·(N-1)/2+2-я группа информационных входов блока является второй установочной шиной 19 пеленгатора, вторая группа информационных входов блока определения точек пересечения окружностей направлений 18 является третьей установочной шиной 20 пеленгатора, вторая группа информационных входов блок поиска глобального экстремума 15 соединена с группой информационных выходов третьего запоминающего устройства 14, а первая группа информационных входов объединена с группой адресных входов третьего запоминающего устройства 14, группа информационных выходов блока поиска глобального экстремума 15 является выходной шиной 16 пеленгатора, входы синхронизации блока формирования пространственного описания конусов и окружностей направлений 17, блока определения точек пересечения окружностей направлений 18 и блока поиска глобального экстремума 15 соединены с выходом генератора синхроимпульсов 2, а радиоприемное устройство 6, аналого-цифровой преобразователь 7 и блок преобразования Фурье 8 выполнены N-канальными, а блок вычисления ППИП 9, блок вычитания 11, умножитель 12 и сумматор 13 N·[N-1)/2 - канальными, группа из N информационных входов радиоприемного устройства 6 соединена с соответствующими выходами N антенных элементов антенной решетки 5.
Пеленгатор (см. фиг. 1) работает следующим образом. Перед началом работы пеленгатора рассчитывают эталонные значения первичных пространственно-информационных параметров Δφl,h,изм(fν) средних частот всех поддиапазонов fν=Δf(2ν-1)/2. Ширина поддиапазонов Δfν определяется минимальной шириной пропускания приемных трактов пеленгатора. Для этого предварительно осуществляется описание пространственных характеристик антенной решетки 5. С этой целью измеряют взаимные расстояния между антенными элементами Al,h решетки 5 при их размещении на горизонтальной плоскости. В общем случае (Zl,h≠0) используют расстояния между проекциями пространственного размещения АЭ на горизонтальную плоскость, проходящую через первый антенный элемент. В этом случае для каждого АЭ дополнительно измеряют значения {Zl,h} как {Zl,h}={Zl}-{Zh}. Результаты измерений по шине 1 (см. фиг. 1) поступают на вход блока формирования эталонных значений ППИП 3. Здесь по известному алгоритму (см. Пат. RU №2283505, МПК 7 G01S 13/46, опубл. 10.09.2006 г., бюл. №25; пат. RU №2263328, опубл. 24.05.2004 г., бюл. №30) вычисляют значения Δφl,h,изм(fν), которые в дальнейшем хранят в первом запоминающем устройстве 4. Вводится склонение θскл антенной решетки 5 относительно направления на север, например, как угол между векторами, проходящими через первый и второй АЭ и центр АР и направлением на север.
В процессе работы пеленгатора с помощью блоков с 5-го по 14-й (см. фиг.1) осуществляют поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. Принимаемые АР 5 сигнала на частоте Δfν от всех N АЭ одновременно поступают на соответствующие входы N-канального приемника 6, где их усиливают, фильтруют и переносят на промежуточную частоту, например 10,7 МГц. С N выходов промежуточной частоты приемника 6 сигналы поступают на соответствующие N входов аналого-цифрового преобразователя (АЦП) 7, где синхронно преобразуют в цифровую форму. Полученные цифровые отсчеты сигналов всех N антенных элементов в блоке 7 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые друг относительно друга на π/2. В результате в блоке 7 формируют 2N последовательностей отсчетов (квадратурные составляющие сигналов от N антенных элементов). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 7 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в Пат. РФ №2263328 и Пат. РФ №2283505.
На завершающем этапе в блоке 7 формируют N комплексных последовательностей отсчетов путем попарного объединения отсчетов скорректированных последовательностей соответствующих АЭ, которые поступают на соответствующие входы N-канального блока преобразования Фурье 9. В результате выполнения в блоке 9 операции в соответствии с выражением 

где l, h=1,2,…, N, l≠h - номер АЭ. На его основе определяется Δφl,h,изм(fν) как

Эти функции выполняются N·(N-1)/2- канальным блоком вычисления ППИП 9. В предлагаемом устройстве все N·(N-1)/2 одновременно измеренных значений Δφl,h,изм(fν) очередным импульсом генератора 2 записывают во второе запоминающее устройство 10. Выполнение этой операции соответствует формированию массива измеренных ППИП Δφl,h,изм(fν).
Основное назначение блоков 10, 11, 12, 13, 14 и 3, 4 состоит в том, чтобы оценить степень отличия измеренных параметров Δφl,h,изм(fν) от эталонных значений, рассчитанных для всех направлений прихода сигнала Δθk и Δβc и всех Δfν. Данная операция осуществляется следующим образом.
Эталонные значения Δφl,h,эm(fν) лля всех N·[N-1)/2 пар АЭ, хранящиеся в первом запоминающем устройстве 4, одновременно поступают на N·(N-1)/2 групп входов уменьшаемого блока вычитания 11. На N·[N-1)/2 групп входов вычитаемого блока 11 поступают измеренные значения Δφl,h,изм(fν) c выходов блока 10. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар АЭ. Например, из φ3,8,эm(fν) поочередно вычитаются только значения Δφ3,8,изм(fν) для всех направлений прихода сигнала Δθk и Δβc.
На следующем этапе полученные разности возводят в квадрат в блоке 12. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значения. Для возведения в квадрат каждый результат вычитаний умножается сам на себя в блоке 12.Полученные квадраты разностей складывают в сумматоре 13 и записывают в третье запоминающее устройство 14. В результате в блоке 14 формируется массив данных H(fν), на основе которых осуществляют поиск параметров θ и β.
В устройстве-прототипе операция поиска минимального значения суммы квадратов невязки minH(fν) осуществляется на базе метода случайного поиска, что приводит к существенным временным затратам.
Сокращение временных затрат на поиск minH(fν) в предлагаемом устройстве достигается благодаря использованию упорядоченного перебора значений H(fν) на основе метода пересечения окружностей направлений. С этой целью в устройство-прототип введены блоки 17, 18 и 15.
Блок формирования пространственного описания конусов и окружностей направлений 17 (см. фиг. 1) предназначен для последовательного формирования конусов и далее окружностей направлений для каждой из N·(N-1)/2 используемых в обработке пар АЭ. С этой целью на N групп его информационных входов поступают измеренные значения ППИП Δφl,h,изм(fν) с выходов блока 9. На N·[N-1)/2+1-ю группу информационных входов подается значение частоты настройки радиоприемного устройства fν, а на N·(N-1)/2+2-ю группу информационных входов - геометрия антенной решетки 5 (взаимные расстояния между АЭ) d(l,h). В блоке 17 определяется длина волны сигнала λν, необходимое количество пространственных описаний конусов (в соответствии с выражением 5), размеры конусов и окружностей (выражение 6).
На следующем этапе в блоке 18 осуществляют проверку на пересекаемость окружностей направлений, определяют точки пересечения окружностей направлений, выполняют расчет соответствующих им предварительных значений азимута θ' j и угла места β' j (см. фиг.4). При использовании в обработке большего числа пар АЭ могут определяться точки с максимальным количеством пересечений окружностей направлений и соответствующие им θ' j и β' j.
По этим значениям выделяют соответствующие им величины сумм квадратов невязки H(fν) и далее определяют минимальную среди них minH(fν). Данные операции выполняет блок поиска глобального экстремума 15. Кроме того, в функции блока 15 входит локальная оптимизация (уточнение) значения minH(fν) путем сравнения с ближайшими элементами Н(fν). Наиболее вероятное направления прихода радиосигнала определяют по наименьшей сумме квадратов невязок minH(fν)опт.
В устройстве, реализующем предложенный способ, используют известные элементы и блоки, описанные в научно-технической литературе.
Варианты реализации антенных элементов и антенной решетки 5 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь, 1997; Torrieri D. J. Principles of military communications system. Detham/Massachusetts. Artech House, Inc., 1981. - 298 p.). Для заявляемого пеленгатора целесообразно использовать один из широко известных типов антенн: симметричные и несимметричные вибраторы (объемные вибраторы), дискоконусные антенны, биконические антенные элементы и др. Выбор антенных элементов определяется заданным частотным диапазоном ΔF (коэффициентом перекрытия), конструктивными особенностями антенной решетки. В общем случае размещение АЭ в горизонтальной плоскости может быть произвольным. Разнос АЭ в вертикальной плоскости улучшает точностные характеристики пеленгатора при измерении Δβ. Количество используемых антенных элементов N и расстояния между ними определяются заданной точности измерения пространственных параметров, диапазоном рабочих частот AF и эффектом взаимного влияния АЭ друг на друга. Последние определяет минимальное расстояние между АЭ решетки 5.
Для обеспечения наиболее высокой и равной со всех направлений точности пеленгования целесообразно использование АР 5 с кольцевым (эллиптическим) размещение АЭ (см. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964. - 640 с.) с максимально возможным радиусом и разносом по высоте.
Важным аспектом выполнения АР 5 является реализация коэффициента перекрытия Кпер частотного диапазона. В случаях, когда Kпер задается равным 10 и более необходим переход к использованию АР с двойной и более кольцевой структурой.
Анализ зависимости количества АЭ N и Kпер (по уровню взаимного влияния АЭ в нижней части диапазона частот и неоднозначности получаемых оценок в его верхней части) показал, что для устранения негативных явлений и их влияния на точность пеленгования при Kпер=10 необходимо иметь не менее 8 АЭ (см. Пат. RU 2263328, опубл. 27.10.2005 г., бюл. №30).
N-канальное радиоприемное устройство 6 может быть реализовано с помощью набора из N полупрофессиональных приемников IC-RS500 фирмы ICOM (см. Communication Receiver IC-RS500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используют одновременно в качестве первого и второго гетеродинов других приемников. Кроме того, в качестве блока 6 могут использоваться и другие приемники фирмы ICOM: IC-R7000, IC-PCR1000. Однако наиболее предпочтительным вариантом реализации блока 6 является использование восьмиканального (шестнадцатиканального) радиоприемного устройства фирмы СТЦ (см. Специальный технологический центр. Информационно-аналитический альманах. Под. ред. А.А. Гетманцева. - Санкт-Петербург, 2011 г., стр. 50-59).
N-канальные аналого-цифровой преобразователь 7, блок преобразования Фурье 8, а также N·[N-1)/2 - канальный блок вычисления ППИП 9 и второе запоминающее устройство 10 реализуют с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP-21062. Руководство пользователя (см. e-mail: insys@arc.ru www-сервер www.insys.ru ). Субмодуль ADMDDC2WB реализует функции блока 7 и содержит микросхемы DIGITAL DOWN CONVERTER (DDC) AD6620 фирмы Analog Devices для извлечения части полосы частот из широкой входной полосы сигнала на промежуточной частоте 10,7 МГц N приемников IC-8500 или N-канального приемника фирмы СТЦ, преобразование этой полосы в полосу модулирующих частот и вывод ее в квадратуре. Данная операция осуществляется путем умножения оцифрованного сигнала на квадратурное опорное колебание внутреннего генератора DDC.
Субмодуль цифрового приема ADMDDC2WB используется в несущих платах типа ADP6015A, ADP60PCI, ADP62PCI. Базовый модуль на базе платы ADP60PCI ν.3.2 на процессоре Shark ADSP-21062 реализует функцию N-канального дискретного преобразования Фурье (блок 8), операцию умножения на комплексно-сопряженную пару отсчетов каналов (блок 8), нахождение разности фаз сигналов Δφl,h,изм(fν) (блок 9), а также запоминание измеренных значений разностей фаз (блок 10).
Сумматор 13 и блок вычитания 11 содержат по N·(N-1)/2 идентичных канала, реализуют по известным схемам (см. Ред. Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Первое и третье запоминающие устройства 4 и 14 соответственно представляют из себя буферные запоминающие устройства (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990.-288с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. -160с.).
Умножитель 12 содержит N·(N-1)/2 идентичных каналов, реализует операцию возведение в квадрат, а его выполнение освещено в книге Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256с.
Блок формирования эталонных значений разностей фаз 3 предназначен для создания таблиц эталонных значений разностей фаз Δφl,h,изм(fν) для различных пар антенных элементов, l,h=1,2,…, N; l≠h, различных поддиапазонов частот v и различных направлений прихода сигнала Δθk и Δβс заданной дискретностью, k=1,2,…,K; K·Δθk=2π, с=1,2,…,С; С·Δβc=π/2. На подготовительном этапе по первой установочной шине 1 задают следующие исходные данные:
сектор обработки по азимуту {θmin, θmax};
сектор обработки по углу места {βmin, βmax};
точность нахождения углового параметра Δθk;
точность нахождения угломестного параметра Δβc;
топология размещения антенных элементов {d(l,h)},
разнос антенных элементов в вертикальной плоскости {Zl,h};
диапазон частот ΔF, ширину Δf и средние частоты {fν} поддиапазонов.
Величины {θmin, θmax} и {βmin, βmax} зависят от местоположения пеленгатора относительно зоны контроля. Точность нахождения угловых параметров Δθk и Δβc определяются, в конечном счете, заданной точностью пеленгации, размещением пеленгатора относительно зоны контроля и ограничивается инструментальной точностью. Последняя в свою очередь определяется типом (размером и геометрией) используемой АР5, характеристиками АЭ, частотным диапазоном ΔF, условиями распространения радиоволн, видом модуляции сигнала и др. Задача блока 3 состоит в том, чтобы для данного пеленгатора, каждого частотного поддиапазона Δfν, заданной топологии АР 5 с дискретностью по азимуту Δθk и углу места Δβc, рассчитать идеальные (эталонные) значения разностей фаз для всех возможных пар антенных элементов Δφl,h,эт(fν).
Блок 3 может быть выполнен в виде автомата на базе высокопроизводительного 16-ти разрядного микропроцессора К1810ВМ86 (см. Вениаминов В.Н. и др. Микросхемы и их применение: Справочное пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989. - 240с.; Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512с.) и работающего в соответствии с известным алгоритмом, приведенном на фиг. 10 устройства-прототипа.
Построение генератора синхроимпульсов 2 известно и широко освещено в литературе (Радиоприемные устройства: учебное пособие по радиотехнике. Спец. ВУЗов / Ю.Т. Давыдов и др.; - М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсаторов помех: Часть II. В.В. Никитченко.- Л.: ВАС. - 1990. - 176 с.).
Блок формирования пространственных описаний конусов и окружностей направлений 17 может быть реализован в соответствии с фиг.5 и 6. В его функции входит:
преобразование частоты сигнала fν в длину волны λν
расчет разности фаз принимаемых сигналов в различных АЭ в длинах волн

для первой пары АЭ;

для второй пары АЭ и т.д.;
определение необходимого количества используемых пространственных описаний конусов и окружностей направлений К, К∈Е, Е принимает целочисленные значения;
построение окружностей направлений:


Названные функции блока 17 реализуют с помощью известных элементов, приведенных на фиг. 5 и 6. Блок 17 содержит N·(N-1)/2 идентичных трактов формирования пространственного описания конусов и окружностей направлений 21.1-21.N·[N-1)/2. Каждый тракт 21.i содержит блок вычисления функции arctgΔφ+1 22.i, блок определения длины волны 23.i, первый 24.i и второй 25.i умножители, блок определения количества конусов и окружностей направлений 26.i и запоминающее устройство 27i. На N·(N-1)/2 группы его информативных входов (по количеству трактов 21), с информационных выходов блока вычисления ПНИН 9 поступают измеренные значения разностей фаз Δφl,h,изм(fν). На N·[N-1)/2+1-ю группу информационных входов подается текущее значение частоты принимаемого сигнала со второй группы информационных выходов радиоприемного устройства б (одновременно на все тракты 21). По второй установочной шине 19 поступают значения взаимных расстояний d(l,h) между АЭ АР 5. Последние определяют на подготовительном этапе работы пеленгатора. Данная структура блока 17 получена в результате подстановки выражения (9) в выражение (10)

Реализация всех названных блоков известна, широко освещена в литературе и трудностей не вызывает (см. например, Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.). На фиг.6 приведен вариант реализации блока определения количества конусов и окружностей направлений 26. Он содержит блок вычисления функции arctg 28, умножитель 29, сумматор 30, блок сравнения 31, счетчик импульсов 32. В задачу блока 26 входит определение максимального значения К, при котором еще сохраняется выполнение неравенства (9). Реализация всех элементов блока 26 известна и трудностей не вызывает. Содержимое счетчика 32 увеличивается по мере поступления импульсов с первого выхода блока сравнения 31. При нарушении неравенства (9) на втором выходе блока 31 формируется импульс, который сбрасывает содержимое счетчика 32 (его содержимое вновь становится равным нулю). Последовательное увеличение содержимого счетчика 32 (увеличение K) соответствует последовательному формированию пространственного описания окружностей направлений большего диаметра в блоке 17. В результате в запоминающих устройствах 27 всех N·(N-1)/2 трактов формирования записываются значения окружностей направлений 21 для всех пар АЭ АР 5. Синхронность работы всех элементов блока 17 обеспечивают импульсы блока 2.
Блок определения точек пересечения окружностей направлений 18 может быт реализован в соответствии со структурной схемой, приведенной на фиг. 7. В его функции входит:
расчет координат пересечения окружностей направлений в соответствии с выражениями:


Здесь Δх1, Δy1, Δz1, Δx2, Δy2, Δz2 - относительные координаты второго АЭ относительно первого, и четвертого АЭ относительно третьего, i - номер точки пересечения окружностей направлений. При этом сделано допущение, что АЭ АР лежат в плоскости xOy;
проверка окружностей на пересекаемость. Если xi·xi+yi·yi>1, то окружности не пересекаются, осуществляют переход к следующим значениям d1 и d2 (см. фиг. 4);
расчет ординаты z

расчет предварительных значений азимута и угла места прихода


Расчет координат пересечения окружностей (xi,yi) ведется в плоскости антенной системы, не смотря на то, что сами точки пересечения находятся на полусфере единичного радиуса. Это правомочно, так как существует однозначное соответствие между точками полусферы и точками плоскости, ограниченной этой полусферой. Для нахождения предполагаемого направления на источник необходимо получить точку пересечения окружностей в сферической системе координат (азимут и угол места). Для этого используют стандартные формулы перевода из декартовой системы координат в сферическую, в которых участвует z-координата точки, которую требуется найти. Последняя однозначно определяется при наличии информации о xi и yi с учетом того, что радиус полусферы равен единице.
Для реализации этих функций на первые групп информационных входов блока 18 подаются значения d1, d2,…,dN·(N-1)/2, с группы информационных выходов блока 17. На вторые N·(N-1)/2 групп информационных входов поступают значения относительных координат Δх1, Δy1, Δx2, Δy2, …, ΔxN·(N-2)/2, ΔyN·(N-2)/2 c третьей установочной шины 20 пеленгатора. Последние измеряют на подготовительном этапе совместно со значениями d(l,h).
Названные функции блока 18 реализуются с помощью известных элементов, широко освещенных в литературе. Блок 18 содержит N·(N-1)/2 трактов анализа 33, каждый из которых содержит первый 34, второй 35, третий 36, четвертый 37, пятый 44, шестой 45, седьмой 46, восьмой 47, девятый 48 и десятый 49 умножители, первый 38, второй 40, третий 41, четвертый 43 и пятый 55 блоки вычитания, первый 39, второй 42 и третий 56 делители, первый 50, второй 51, третий 54 и четвертый 56 блоки элементов "И", первый 52 и второй 53 сумматоры, блок извлечения квадратного корня 57, блок вычисления arctg-функции 58 и блок вычисления arcsin-функции 59.
Блоки с 34 по 47 предназначены для расчета координат х и у пересечения окружностей направлений в соответствии с выражением (12). С помощью блоков 48-53 осуществляется проверка на пересекаемость окружностей направлений. В случае выполнения неравенства xi·xi+yi-yi>1 блок сравнения 55 формирует управляющий сигнал, запрещающий формирование предварительных значений θ' и β' (блоки элементов "И" 50, 51, 54 и 56 закрываются и дальнейшее прохождений (обработка) координатных данных xi и yi запрещается). В результате данная пара АЭ АР в дальнейшей обработке не участвует.
В противном случае, при невыполнении названного неравенства определяются значения 



Блок поиска глобального экстремума 15 предназначен для:
преобразования предварительных значений
выполнение локальной оптимизации над всеми Hi(fν) путем сравнения с ближайшими к ним элементами массива H(fν) и выбора среди них наименьшего minHi(fν)оnm;
преобразование minHi(fν)onm в значения наиболее вероятного направления прихода радиосигнала: θi и βi .
Для реализации названных функций на первую группу информационных входов блока 15 подаются значения предварительных пространственных параметров сигнала θ' и β' с группы информационных выходов блока определения точек пересечения окружностей направлений 18. На вторую группу информационных входов блока 15 поступают значения Hi(fν) и соседние с ними элементы 

Реализация блока 15 известна и широко освещена в литературе. Он содержит последовательно соединенные блок поиска минимальной суммы квадратов невязки и дешифратор. В задачу последнего входит преобразование найденного минимума значения minHi(fν)опт в соответствующие ему значения пространственных параметров θ и β. Поиск minHi(fν)опт целесообразно реализовать на основе пирамидальной схемы с использованием быстродействующих компараторов.
Реализация блоков 15, 16 и 17 на дискретных элементах приводит к существенным временным затратам (снижению быстродействия пеленгатора) значительным габаритным размерам, большому весу и потреблению энергии. В связи с этим названные блоки совместно с блоками 7-14 целесообразно реализовать на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html\ Алгоритм работы блоков 15, 17 и 18 приведен на фиг.4.
Кроме того, блоки 9-15, 17 и 18 могут быть реализованы на ПЭВМ. В качестве минимальных требований к нему можно определить следующее: процессор Pentium 300 МГц, 128 МБ оперативной памяти, 25 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows XP SP2 и выше, библиотека .NetFrameWork 3.5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО АДАПТИВНОГО ПРИЕМА РАДИОСИГНАЛОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2477551C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341811C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
Изобретения предназначены для определения пеленга и угла места источника априорно неизвестного сигнала. Достигаемый технический результат - сокращение временных затрат на оценивание пространственных параметров сигналов - азимута и угла места. Сущность заявляемого способа заключается в последовательном синхронном преобразовании высокочастотных сигналов одновременно со всех N антенных элементов (АЭ) в цифровую форму, одновременном измерении в каждом частотном поддиапазоне на совпадающих интервалах времени комплексных спектров пар сигналов для всех используемых в обработке N·(N-1)/2 пар АЭ, определении свертки комплексно-сопряженых спектров, одновременном получении разности фаз радиосигналов Δφ1,h,изм(fν) для всех N·(N-1)/2 пар АЭ и каждого частотного поддиапазона путем преобразования Фурье, формировании и запоминании эталонных разностей фаз сигналов для всех возможных направлений прихода радиосигнала, вычислении значения функции дисперсии невязок разности фаз по всем угловым параметрам, формировании для каждой используемой пары АЭ на основе значений Δφ1,h,изм(fν) конечного семейства конусов возможных направлений на источник и набора непересекающихся окружностей направлений, запоминании точек пересечения окружностей направлений от разных пар АЭ, определении значений функции дисперсии невязок разностей фаз F(fν) для точек пересечения окружностей направлений и минимальной среди них minH(fν), локальной оптимизации minH(fν) путем сравнения с ближайшими к ней значениями H(fν), определении наиболее вероятного направления прихода радиосигнала по наименьшему значению minH(fν)опт. В пеленгаторе, реализующем способ, дополнительно введены блок формирования конусов и окружностей направлений, блок определения точек пересечения окружностей направлений и блок поиска глобального экстремума, соединенные определенным образом между собой и остальными элементами заявленного пеленгатора. 2 н.п. ф-лы, 8 ил., 1 табл.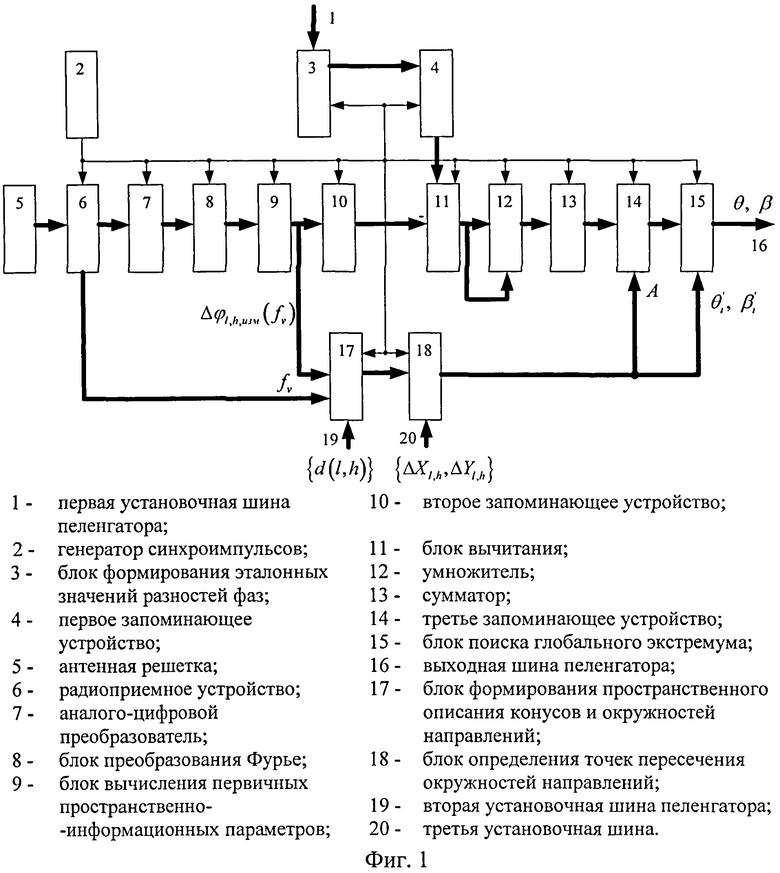
1. Способ пеленгации радиосигналов, включающий прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈F, v=1,2,…,F, V=ΔF/Δf, антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованным с местными условиями вариантом размещения, отличающийся тем, что осуществляют параллельное синхронное преобразование высокочастотных сигналов одновременно всех N антенных элементов антенной решетки в электрические сигналы промежуточной частоты, одновременную дискретизацию их и квантование, формирование из них 2N последовательностей отсчетов путем разделения на квадратурные составляющие с последующим их преобразованием в скорректированные последовательности квадратурных составляющих сигнала, одновременное формирование из всех скорректированных последовательностей квадратурных составляющих сигналов N комплексных последовательностей сигналов с последующим преобразование их с помощью дискретного преобразования Фурье, одновременное попарное комплексно сопряженное перемножение отсчетов сигналов преобразованных последовательностей на соответствующих частотах, одновременный расчет для всех N·(N-1)/2 пар антенных элементов разности фаз сигналов для каждого частотного поддиапазона с последующим запоминанием их и формированием массива невязок, где N·(N-1)/2 - количество неповторяющихся пар антенных элементов антенной решетки, используемых в обработке, для каждой пары антенных элементов на основе измеренных значений Δφ1,h,изм(tν) формируют конечное семейство пространственных описаний конусов возможных направлений на источник и далее набора взаимно непересекающихся окружностей, полученных в результате пересечения семейством конусов удаленной сферы, запоминают точки пересечения окружностей от разных пар антенных элементов, определяют значения сумм квадратов невязок H(fν) для точек пересечения окружностей, определяют минимальное minH(fν) из выбранных значений функции H(fν), выполняют локальную оптимизацию minH(fν) путем сравнения с ближайшими к нему значениями сумм квадратов невязки, определяют наиболее вероятное направление прихода радиосигнала по наименьшей сумме квадратов невязок.
2. Пеленгатор, содержащий антенную решетку, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования с согласованным с местными условиями вариантом размещения, генератор синхроимпульсов, первое запоминающее устройство и блок формирования эталонных значений разности фаз (ФЭЗРФ), группа информационных входов которого является первой установочной шиной пеленгатора, последовательно соединенные радиоприемное устройство, аналого-цифровой преобразователь, блок преобразования Фурье, блок вычисления первичных пространственно-информационных параметров (ППИП), второе запоминающее устройство, блок вычитания, умножитель, сумматор и третье запоминающее устройство, причем группа входов уменьшаемого блока вычитания соединена с группой информационных выходов первого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока ФЭЗРФ, а выход генератора синхроимпульсов соединен со входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычисления ППИП, первого, второго и третьего запоминающих устройств, блока ФЭЗРФ, блока вычитания, умножителя и сумматора, отличающийся тем, что дополнительно введены последовательно соединенные блок формирования пространственного описания конусов и окружностей направлений, блок определения точек пересечения окружностей направлений и блок поиска глобального экстремума, причем N·[N-1)/2 групп информационных входов блока формирования пространственного описания конусов и окружностей направлений соединены с соответствующими N·(N-1)/2 группами информационных выходов блока вычисления ППИП, N·(N-1)/2+1-я группа информационных входов соединена со второй группой информационных выходов радиоприемного устройства, a N·(N-1)/2+2-я группа информационных входов блока является второй установочной шиной пеленгатора, вторая группа информационных входов блока определения точек пересечения окружностей направлений является третьей установочной шиной пеленгатора, вторая группа информационных входов блок поиска глобального экстремума соединена с группой информационных выходов третьего запоминающего устройства, а первая группа информационных входов объединена с группой адресных входов третьего запоминающего устройства, группа информационных выходов блока поиска глобального экстремума является выходной шиной пеленгатора, входы синхронизации блока формирования пространственного описания конусов и окружностей направлений, блока определения точек пересечения окружностей направлений и блока поиска глобального экстремума соединены с выходом генератора синхроимпульсов, а радиоприемное устройство, аналого-цифровой преобразователь и блок преобразования Фурье выполнены N-канальными, а блок вычисления ППИП, блок вычитания, умножитель и сумматор N·[N-1)/2-канальными, группа из N информационных входов радиоприемного устройства соединена с соответствующими выходами N антенных элементов антенной решетки.
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341811C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2002 |
|
RU2258241C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ | 2004 |
|
RU2262119C1 |
| FR 2935493 A1, 05.03.2010 | |||
| US 2011081471 A1, 28.07.2011 | |||
| WO 2005045459 A3, 07.07.2005 | |||
| US 5477230 A, 19.11.1995. | |||

