Заявляемые объекты объединены единым изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах, а также в средствах радиоконтроля для определения пеленга и угла места на источник априорно неизвестного сигнала.
Известен способ пеленгации источника сигнала (см. пат. RU №2192651, G01S 3/14, G01S 3/00, опубл. 05.10.2000 г.), включающий прием сигнала элементами двух линейных эквидистантных антенных решеток, расположенных взаимно-перпендикулярно, вычисление пространственного спектра Фурье сигнала, принятого элементами первой линейной эквидистантной антенной решетки и комплексно-сопряженного пространственного спектра Фурье сигнала, принятого элементами второй линейной эквидистантной антенной решетки, преобразование масштабов обоих вычисленных пространственных спектров сигнала по логарифмическому закону, корреляционный анализ и измерение относительного сдвига преобразованных пространственных спектров сигнала и оценку угловых координат.
Недостатком способа является зависимость точности измерения пеленга от взаимной ориентации источника излучения и антенной системы пеленгатора, невозможность получения информации об угле наклона фронта волны радиосигнала β, отсутствие в результатах пеленгации информации, учитывающей влиянии среды распространения радиоволн.
Известен способ (по пат. RU №2144200, МПК7 G01S 3/14. Способ пеленгации радиосигналов и многоканальный пеленгатор. Опубл. 1.10.2000 г.). Он включает прием радиосигналов антенной решеткой, состоящей из N антенных элементов, выполненных идентичными в количестве не менее трех и расположенных в плоскости пеленгования, измерение в каждом частотном поддиапазоне комплексных амплитуд пар сигналов, характеризующих фазы каждого радиосигнала, принимаемого в соответствующем частотном поддиапазоне одним из антенных элементов пары, выбранным в качестве сигнального, относительно фазы радиосигнала, принимаемом в том же частотном поддиапазоне другим из антенных элементов пары, выбранным в качестве опорного для всех используемых пар антенных элементов, формирование двухмерных угловых спектров каждого принимаемого в соответствующем частотном поддиапазоне радиосигнала по измеренным комплексным амплитудам пар сигналов для различных пар антенных элементов антенной решетки соответственно взаимному расположению этих антенных элементов в плоскости пеленгования, по которым судят об азимутах и углах места принятых радиосигналов.
Способ-аналог позволяет повысить точность пеленгования при сканировании в широком диапазоне частот и получить информацию об угле наклона фронта волны источника радиосигнала. Однако способу присущ и недостаток - низкая точность пеленгования в сложной сигнально-помеховой обстановке. Способ не в полной мере использует информацию о поле радиосигнала, заложенной в геометрии антенной системы. Кроме того, в данном способе точность пеленгования снижается из-за несинхронного подключения (через коммутатор) антенных элементов пары ко входам двухканального приемника.
Наиболее близким по технической сущности к предлагаемому способу является способ пеленгации (по пат. RU №2263327, МПК7 G01S 3/14. Способ пеленгации радиосигналов и пеленгатор для его осуществления. Опубл. 27.10.2005 г., бюл. №30). Он включает прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈ΔF, ν=1,2,…V, V=ΔF/Δf антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованных с местными условиями вариантом размещения, последовательное синхронное преобразование высокочастотных сигналов каждой пары антенных элементов антенной решетки в электрические сигналы промежуточной частоты, дискретизацию их и квантование, формирование из них четырех последовательностей отсчетов путем разделения на квадратурные составляющие, запоминание в каждой последовательности заданного числа В отсчетов квадратурных составляющих сигналов, коррекцию запомненных отсчетов последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формирование из скорректированных последовательностей квадратурных составляющих отсчетов сигналов двух комплексных последовательностей отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов, преобразование обеих комплексных последовательностей отсчетов сигналов с помощью дискретного преобразования Фурье, попарное перемножение отсчетов сигнала преобразованной последовательности одного антенного элемента на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Al,h, где l, h=1,2,…,N, l≠h, расчет для текущей пары антенных элементов разности фаз сигналов для каждого частотного поддиапазона по формуле Δφl,h,ИЗМ(fν)=arctg(Uc(fν)/Us(fν)), запоминание полученных разностей фаз радиосигналов, формирование и запоминание эталонного набора разностей фаз сигналов исходя из пространственного размещения антенных элементов антенной решетки, используемого частотного диапазона и заданной точности измерений, вычитание из эталонных разностей фаз сигналов соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок и их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, запоминание полученных сумм, находящихся в однозначном соответствии с направлениями прихода радиосигналов, определение наиболее вероятного направления прихода радиосигнала в горизонтальной и угломестной плоскостях по наименьшей сумме квадратов невязок.
Способ-прототип позволяет решить поставленную перед ним задачу - улучшить качество пеленгования, а именно повысить его точность. Однако способу-протопиту так же присущ недостаток, связанный с недостаточной точностью пеленгования в сложной сигнально-помеховой обстановке и обусловленный отсутствием учета влияния среды распространения радиоволн.
Известен многоканальный пеленгатор (по пат. RU №2096793 G01S 3/14. Опубл. 1997 г.). Он содержит антенную решетку, коммутатор, двухканальные: приемник, аналого-цифровой преобразователь, блок преобразователь Фурье, запоминающее устройство, вычислитель сверток, а также вычислитель пеленга и генератор синхроимпульсов.
К недостаткам данного аналога можно отнести низкую точность пеленгации при сканировании в широком диапазоне частот и отсутствие в результатах пеленгации информации об угле наклона фронта волны источника радиосигнала и информации, учитывающей влияние среды распространения радиоволн.
Наиболее близким по технической сущности к предлагаемому устройству является пеленгатор (по пат. RU №2263327, МПК7 G01S 3/14. Способ пеленгации радиосигналов и пеленгатор для его осуществления. Опубл. 27.10.2005 г., бюл. №30). Устройство-прототип содержит антенную решетку, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования и согласованных с местными условиями вариантом размещения, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений разностей фаз, блок вычисления разности фаз, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй вход - с опорным выходом бока преобразования Фурье, первая группа информационных выходов блока вычисления разности фаз соединена с группой информационных входов второго запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с информационными выходами первого запоминающего устройства, информационные входы которого соединены с информационными выходами блока формирования эталонных значений разностей фаз, группа информационных входов которого является входной установочной шиной пеленгатора, последовательно соединенные умножитель, первый сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, первого сумматора, блока определения азимута и угла места, блока формирования эталонных значений разностей фаз и блока вычисления разности фаз.
Устройство-прототип позволяет решить поставленную перед ним задачу - улучшить качество пеленгования, а именно повысить его точность. Однако устройству присущ недостаток - недостаточная точность пеленгования в сложной сигнально-помеховой обстановке.
Целью заявляемых технических решений является разработка способа адаптивного измерения пространственных параметров источников радиоизлучений и устройства для его осуществления, обеспечивающих повышение точности измерения пространственных параметров источников радиоизлучения за счет адаптации к среде распространения радиоволн.
Поставленная цель достигается тем, что в известном способе пеленгации радиосигналов, включающем прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈ΔF, ν=1, 2,…V, V=ΔF/Δf антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованных с местными условиями вариантом размещения, последовательное синхронное преобразование высокочастотных сигналов каждой пары антенных элементов антенной решетки в электрические сигналы промежуточной частоты, причем в качестве опорного антенного элемента поочередно применяются все антенные элементы антенной решетки, дискретизацию сигналов и их квантование, формирование из них четырех последовательностей отсчетов путем разделения на квадратурные составляющие, запоминание в каждой последовательности заданного числа B отсчетов квадратурных составляющих сигналов, коррекцию запомненных отсчетов последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формирование из скорректированных последовательностей квадратурных составляющих отсчетов сигналов двух комплексных последовательностей отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов, преобразование обеих комплексных последовательностей отсчетов сигналов с помощью дискретного преобразования Фурье, попарное перемножение отсчетов сигнала преобразованной последовательности одного антенного элемента Аl на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Ah, где l,h=1,2,…,N, l≠h, расчет для текущей пары антенных элементов разности фаз сигналов для каждого частотного поддиапазона, запоминание полученных разностей фаз радиосигналов, вычисление и запоминание эталонного набора разностей фаз сигналов Δφl,h,k,m,ν эт исходя из пространственного размещения антенных элементов антенной решетки l и h, используемого частотного диапазона Δfν и заданной точности измерений пространственных параметров сигналов в горизонтальной Δθ и угломестной Δβ плоскостях, вычитание из эталонных разностей фаз сигналов соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок и их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, запоминание полученных сумм, находящихся в однозначном соответствии с направлениями прихода радиосигналов, определение наиболее вероятного направления прихода радиосигнала в горизонтальной θc и угломестной βc плоскостях по наименьшей сумме квадратов невязок.
На подготовительном этапе выносным генератором излучают гармонические сигналы на удалении нескольких длин волн в заданной полосе частот ΔF с дискретностью Δfν. Одновременно определяют координаты генератора гармонических сигналов {х, y, z}г. На основе данных о местоположении выносного генератора гармонических сигналов и адаптивного устройства измерения пространственных параметров источников радиоизлучений вычисляют пространственные параметры генератора гармонических сигналов {θk, βm)г, k=1,2,…,K, m=1,2,…,M. Запоминают измеренные разности фаз сигналов Δφl,h,k,m,ν обн в антенных элементах l и h для данного местоположения генератора гармонических сигналов и соответствующего частотного поддиапазона Δfν. Последовательно перемещают генератор гармонических колебаний по сфере относительно антенной решетки адаптивного устройства измерения пространственных параметров источников радиоизлучений с заданной дискретностью в горизонтальной Δθ и угломестной Δβ плоскостях. В каждой точке измеряют пространственные параметры на генератор гармонических сигналов и соответствующие им разности фаз Δφl,h,k,m,ν обн в антенных элементах. Запоминают полученные разности фаз. Формируют скорректированный эталонный набор разностей фаз Δφl,h,k,m,ν ск путем замены рассчитанных эталонных значений разностей фаз Δφl,h,k,m,ν эт на соответствующие измеренные значения разностей фаз Δφl,h,k,m,ν обн, а в процессе работы в качестве эталонного набора разностей фаз используют скорректированный эталонный набор разностей фаз.
Благодаря новой совокупности существенных признаков в заявленном способе, за счет более полного учета на подготовительном этапе уровня влияния рельефа окружающей местности и местных предметов на среду распространения радиоволн, увеличивается точность измерения пространственных параметров источников радиоизлучений.
В заявленном адаптивном пеленгаторе поставленная цель достигается тем, что в известном устройстве, содержащем антенную решетку, выполненную из N антенных элементов в количестве более двух, причем в качестве опорного антенного элемента поочередно применяют все антенные элементы антенной решетки, которые располагают в плоскости пеленгования с согласованным с местными условиями вариантом их размещения, а расстояния между антенными элементами ограничиваются требованиями, обусловленными используемым частотным диапазоном, антенный коммутатор, который содержит N входов и два выхода, выполненный с возможностью синхронного подключения очередной пары антенных элементов к сигнальному и опорному выходам коммутатора соответственно, выходы антенных элементов антенной решетки подсоединены к соответствующим входам антенного коммутатора, а выходы антенного коммутатора соединены соответственно с двумя входами приемника, выполненного двухканальным с опорным и сигнальным каналами и с общими гетеродинами, аналого-цифровой преобразователь и блок преобразования Фурье выполнены двухканальными и соединены последовательно, причем опорный выход приемника соединен с первым входом аналого-цифрового преобразователя, второй вход которого соединен с сигнальным выходом приемника, последовательно соединенные умножитель, сумматор, второе, запоминающее устройство и блок определения азимута и угла места, а также первое, третье запоминающие устройства и генератор синхроимпульсов, выполненный с возможностью подачи команд на управляющий вход коммутатора для последовательного во времени подключения следующих пар антенных элементов, выход которого подсоединен к управляющему входу антенного коммутатора и к синхровходам аналого-цифрового преобразователя, блока преобразования Фурье, блока формирования эталонных значений разностей фаз, первого, второго и третьего запоминающих устройств, блока вычисления разности фаз, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, первая группа выходов которого является угломестной выходной шиной β адаптивного пеленгатора, а вторая группа выходов - азимутальной выходной шиной θ адаптивного пеленгатора, первая входная установочная шина, которая соединена с группой информационных входов блока формирования эталонных значений разностей фаз, а первый и второй информационные выходы блока преобразования Фурье соединены соответственно с первым и вторым информационными входами блока вычисления разности фаз, первая группа информационных выходов которого соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, а первая и вторая группа входов умножителя поразрядно объединены и соединены с группой информационных выходов блока вычитания, дополнительно введены, первый и второй модемы с подсоединенными к каждому из них приемной и передающей антеннами, блок ключей, четвертое запоминающее устройство, радионавигатор, генератор гармонических сигналов с подсоединенной к нему передающей антенной, блок управления, предназначенный для обеспечения одновременной настройки приемника и генератора гармонических сигналов на заданную частоту fν и вычисление пространственных параметров {θk, βm}г генератора гармонических сигналов, дешифратор и вторая входная установочная шина, причем группа адресных входов третьего запоминающего устройства соединена со второй группой информационных выходов блока управления. Группа информационных входов третьего запоминающего устройства соединена со второй группой информационных выходов блока вычисления разностей фаз. Группа информационных выходов третьего запоминающего устройства соединена с первой группой информационных входов блока ключей, группа информационных выходов которого соединена с группой входов уменьшаемого блока вычитания. Вход управления блока ключей соединен с третьим выходом блока управления, первая группа выходов которого соединена с группой входов управления приемника. При этом первая группа входов блока управления является второй входной установочной шиной адаптивного пеленгатора. Четвертая группа выходов блока управления соединена со второй группой информационных входов первого модема, вторая группа информационных выходов которого соединена со второй группой информационных входов блока управления. Вторая группа информационных входов блока ключей соединена с группой информационных выходов четвертого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных разностей фаз. Вход синхронизации блока формирования эталонных разностей фаз объединен со входами синхронизации четвертого запоминающего устройства и блока управления. Группа информационных входов генератора гармонических сигналов соединена с группой информационных выходов дешифратора, группа информационных входов которого соединена со второй группой информационных выходов второго модема, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: повысить точность измерения пространственных параметров источников радиоизлучений в условиях пересеченной местности, городских условиях и сложной сигнально-помеховой обстановке.
Заявленный способ и устройство поясняются чертежами, на которых показаны:
фиг.1 - структурная схема устройства измерения пространственных параметров источников радиоизлучений;
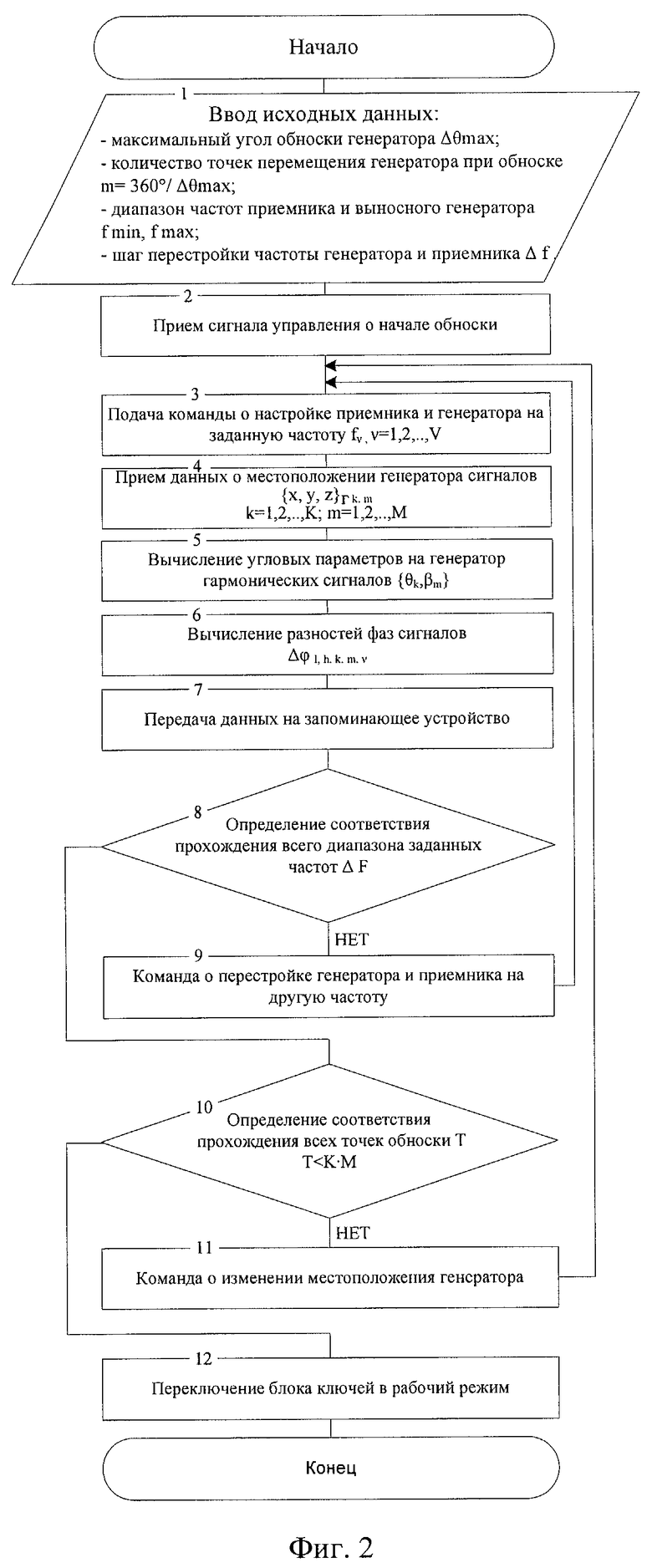
фиг.2 - алгоритм работы блока управления;
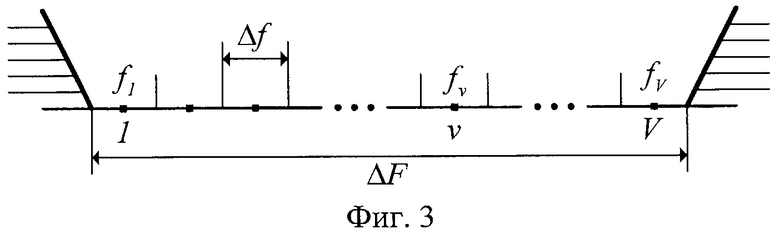
фиг.3 - порядок разбиения заданной полосы частот ΔF на поддиапазоны Δf;
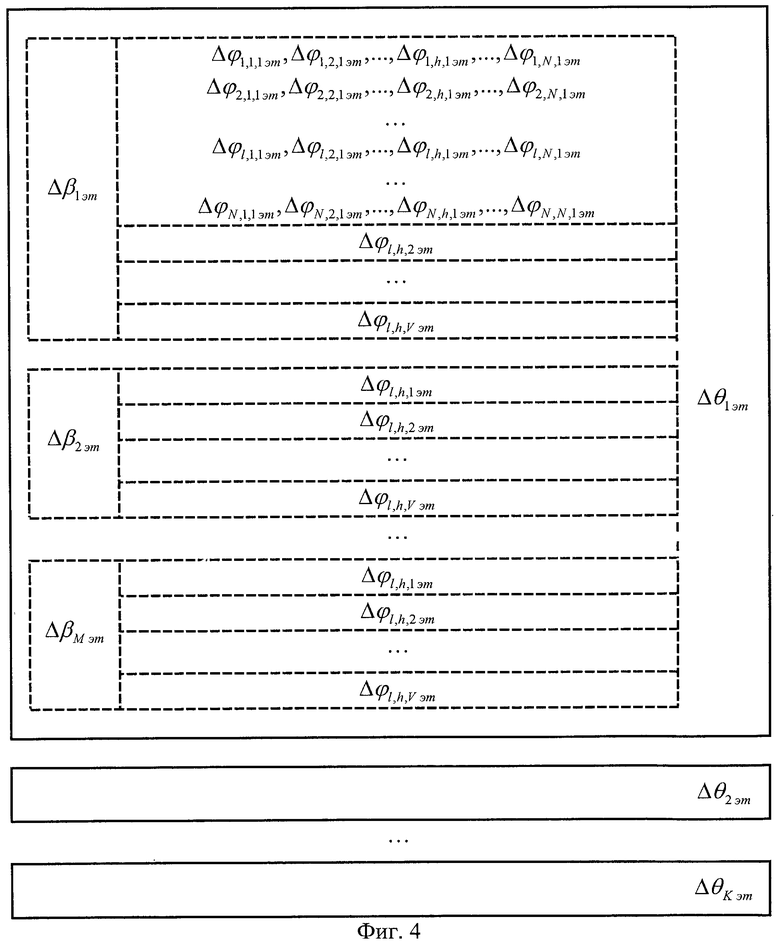
фиг.4 - порядок формирования массива эталонных значений Δφl,h,k,m,ν эт;
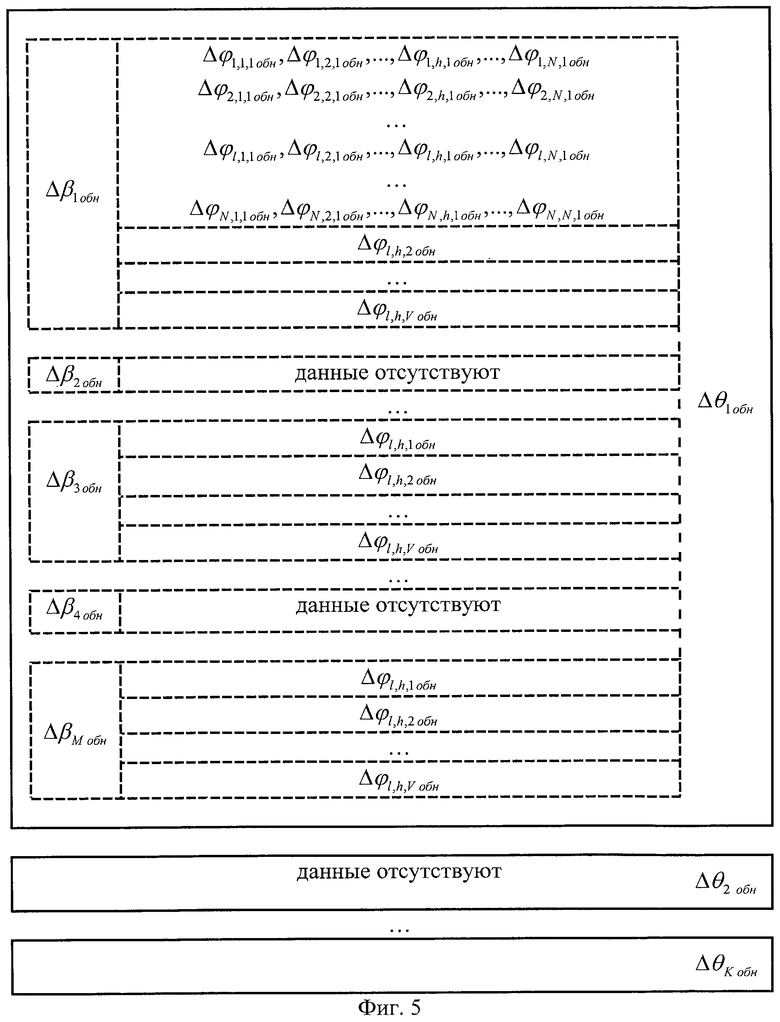
фиг.5 - порядок формирования массива измеренных значений Δφl,h,k,m,ν обн при обноске;
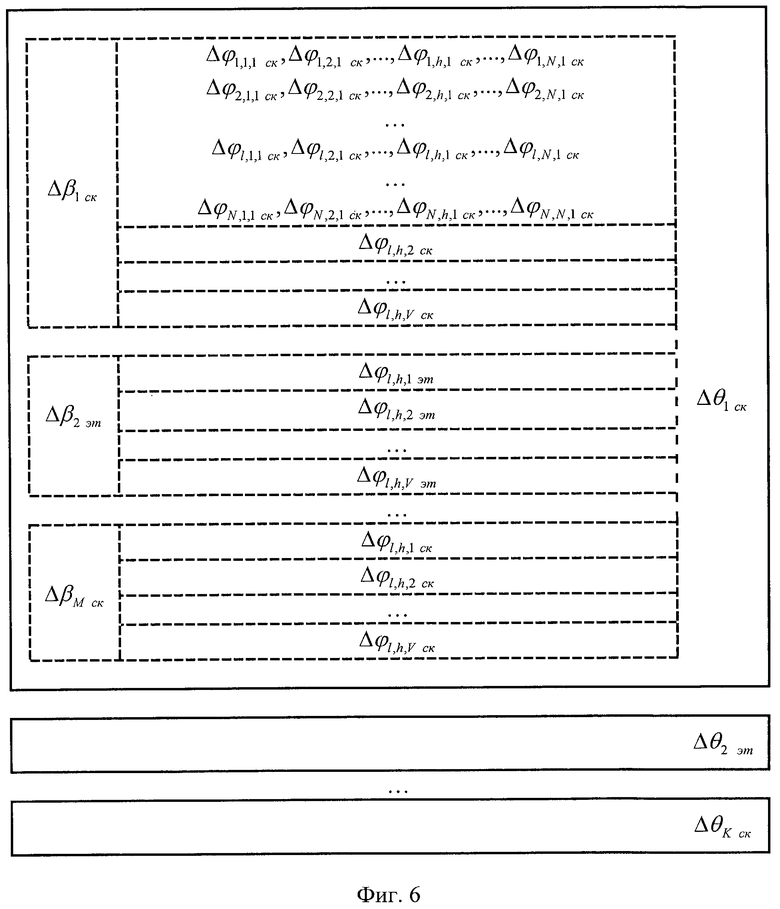
фиг.6 - порядок формирования массива скорректированных эталонных значений Δφl,h,k,m,ν ск;
фиг.7 - вариант формирования массива измеренных значений Δφl,h,k,m,ν изм;
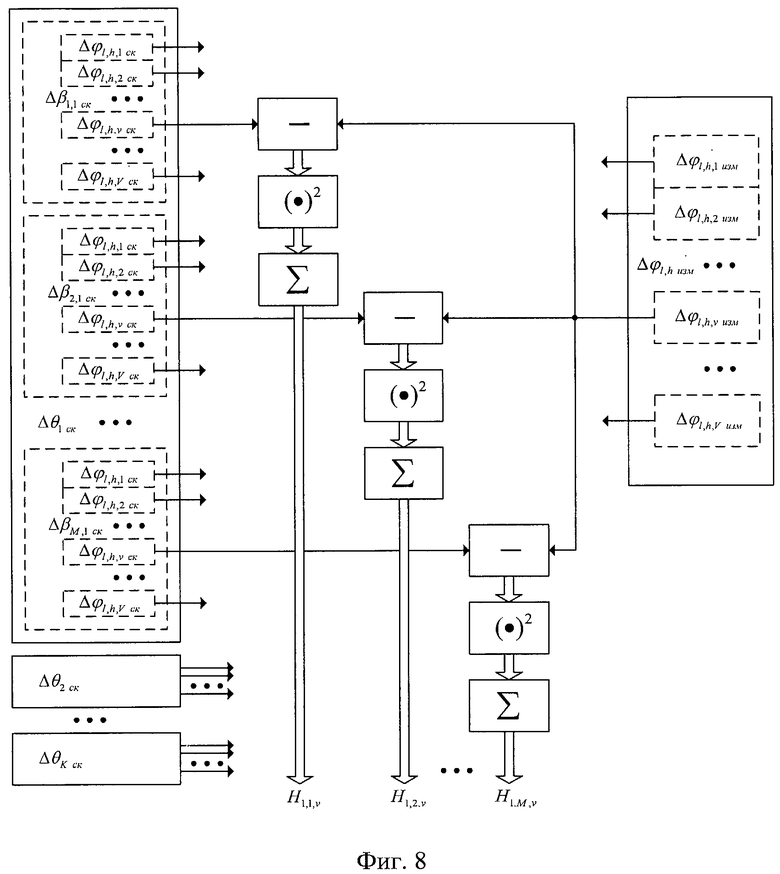
фиг.8 - порядок вычисления суммы Hθ,β,ν поддиапазона Δfν для Δθl и различных углов места Δβm;
фиг.9 - порядок достижения положительного эффекта:
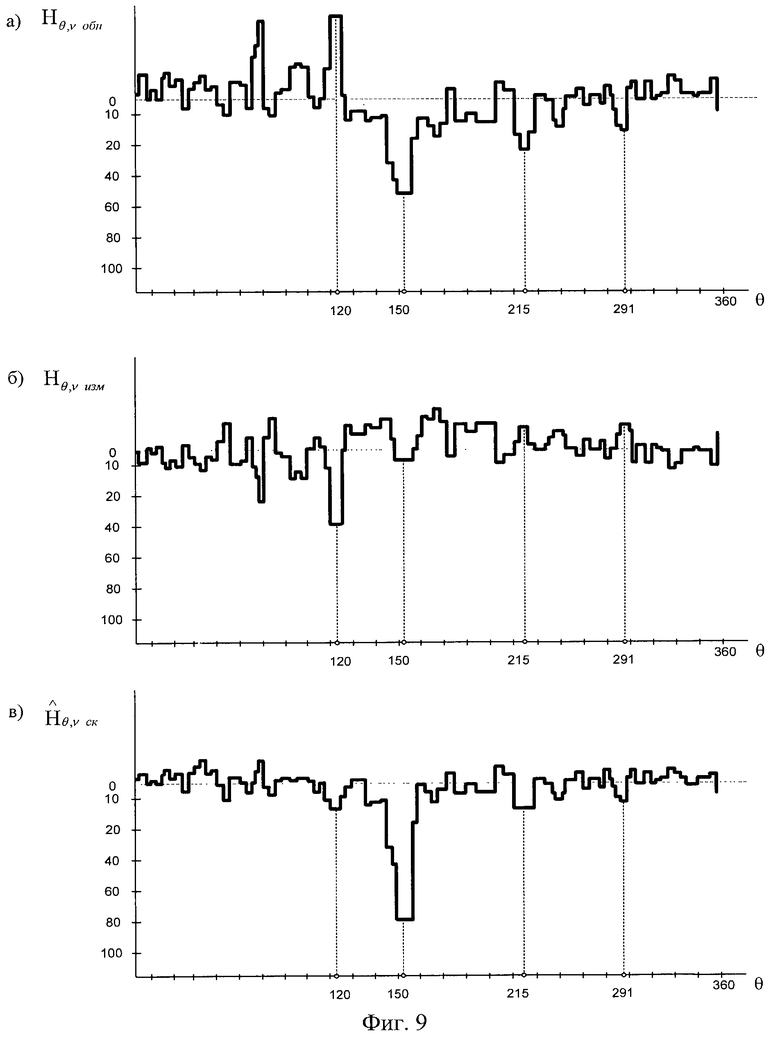
а) вариант фазовой свертки сигнала Hθ,ν обн в горизонтальной плоскости на частоте fν при выполнении обноски;
б) вариант фазовой свертки сигнала Hθ,ν изм в горизонтальной плоскости на частоте fν без учета результатов обноски;
в) вариант скорректированной фазовой свертки сигнала  в горизонтальной плоскости на частоте fν.
в горизонтальной плоскости на частоте fν.
Известно (см. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964, стр.235-284), что на точность измерения пространственных параметров сигналов оказывают влияние особенности рельефа местности и окружение антенной системы. К искажению пеленгов приводит неоднородность почвы (переход от влажной почвы к сухой, от моря к суше), различные металлические и токопроводящие сооружения и предметы (антенны, замкнутые контуры, ангары, деревья, дома и т.д.). Последние создают поля обратного излучения, искажающие ориентировку равнофазных поверхностей электромагнитного поля, что и вызывает ошибки в оценке пространственных параметров сигналов. На практике подобрать площадку для развертывания измерителя, удовлетворяющую всем требованиям (см. там же), весьма сложно. Кроме того, удаленные от измерителя на значительном расстоянии (до нескольких километров) токопроводящие объекты (строения, антенные сооружения, лес и пр.) также приводят к ошибкам измерений.
Учет влияния совокупности названных негативных факторов на точность оценки пространственных параметров сигналов, как правило, осуществляют с помощью обноски или снятия девиации (см. там же, стр.536-537). Получаемые при этом значения отклонений пеленга Δθ и угла места Δβ от истинных значений (точечная оценка) не в полной мере характеризуют искажения электромагнитного поля (см., например, пат. RU №2283505, G01S 13/46. Способ и устройство определения координат источника радиоизлучения. Опубл. 10.09.2006, бюл. №25), которые носят многомодовый характер. Для учета названных искажений электромагнитного поля на соответствующих частотах предлагается снять с него «слепок» в виде разности фаз в пространственно разнесенных точках (антенных элементах решетки).
Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе выполняют следующие операции.
Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых Δf определяются минимальной шириной пропускания приемных трактов пеленгатора. Поддиапазоны, количество которых V=ΔF/Δf, нумеруют ν=1,2,…,V (см. фиг.3). Рассчитывают средние частоты всех поддиапазонов по формуле fν=Δf(2ν-1)/2.
На следующем этапе рассчитывают эталонные значения первичных пространственно-информационных параметров (ППИП) для средних частот всех поддиапазонов fν. В качестве первичных пространственно-информационных параметров используют значения разностей фаз сигналов Δφl,h,ν для всех возможных парных комбинаций антенных элементов в рамках антенной решетки.
Порядок расчета эталонных значений Δφl,h,ν эт следующий. Вводят топологию антенной системы (АС) пеленгатора. Данные по топологии АС включают значения взаимных расстояний между антенными элементами решетки и ее ориентацию относительно направления на север. В качестве последнего возможно использование вектора, проходящего от второго АЭ в направлении первого АЭ (при кольцевой структуре антенной решетки).
В процессе расчета эталонных первичных пространственно-информационных параметров моделируют размещение эталонного источника поочередно вокруг антенной решетки пеленгатора с дискретностью Δθ и Δβ на удалении нескольких длин волн. При этом полагается, что фронт приходящей волны плоский. Для каждого из угловых параметров Δθk, k=1,2,…,K и Δβm, m=1,2,…,M вычисляют значения разностей фаз Δφl,h,k,m,ν эт для всех возможных комбинаций пар антенных элементов решетки и всех частотных поддиапазонов V:

где 
расстояние между плоскими фронтами волн в l-ном и h-ном антенных элементах, пришедшие к решетке под углами Δθk в азимутальной и Δβm в вертикальной плоскостях, l≠h, xl, yl, zl и xh, yh, zh координаты l-го и h-го антенных элементов решетки, C - скорость света. В случае использования антенной решетки с плоским (горизонтальным) размещением АЭ (zl=zh) последнее выражение принимает вид:

Полученные в результате измерений эталонные значения ППИП Δφl,h,k,m,ν эт оформляются в виде эталонного массива данных, вариант представления информации, который показан на фиг.4. В общем случае измеритель готов к работе.
Для повышения точности оценки пространственных параметров дополнительно выполняют обноску пеленгатора. С этой целью выносным генератором на удалении нескольких длин волн излучают гармонические сигналы в заданной полосе частот ΔF с дискретностью Δfν. Одновременно определяют координаты генератора гармонических сигналов {х, y, z}г. На основе данных о местоположении выносного генератора гармонических сигналов и адаптивного устройства измерения пространственных параметров источников радиоизлучений вычисляют пространственные параметры на генератор гармонических сигналов {θk, βm}г. Запоминают измеренные разности фаз сигналов Δφl,h,k,m,ν обн в антенных элементах l и h для данного местоположения генератора гармонических сигналов и соответствующих частотных поддиапазонов Δfν, ν=1,2,…,V. Последовательно перемещают генератор гармонических сигналов по сфере относительно антенной решетки адаптивного устройства измерения пространственных параметров источников радиоизлучений с заданной дискретностью в горизонтальной Δθ и угломестной Δβ плоскостях. В идеальном случае координаты местоположения генератора гармонических сигналов {х, y, z}k,m,г k=1,2,…,K, m=1,2,…,M должны совпадать с моделируемым местом размещения эталонного генератора {х, y, z}k,m,эт. В каждой точке измеряют пространственные параметры на генератор гармонических сигналов и соответствующие им разности фаз Δφl,h,k,m,ν обн в антенных элементах, запоминают полученные разности фаз.
Однако на практике представляет большую сложность полностью выполнить данную операцию в силу целого ряда причин (из-за особенностей рельефа местности, наличия затеняющих зданий и т.п.). Особую сложность представляют точки фиксированного размещения генератора гармонических сигналов над поверхностью земли. В результате количество точек, в которых выполнены измерения при обноске, как правило, заметно уступают расчетным (эталонным). В противном случае отпала бы необходимость в формировании эталонного набора разностей фаз Δφl,h,k,m,ν эт. Поэтому возникает необходимость в формировании скорректированного эталонного набора разностей фаз Δφl,h,k,m,ν ск путем замены рассчитанных разностей фаз Δφl,h,k,m,ν эт на соответствующие измеренные значения разностей фаз Δφl,h,k,m,ν обн. Для номиналов точек эталонного набора разностей фаз, в которых отсутствуют измерения Δφl,h,k,m,ν обн, возможно сохранение эталонных расчетных значений Δφl,h,k,m,ν эт. В качестве альтернативного решения может быть предложена интерполяция значений Δφl,h,k,m,ν ск в промежутках между точками с выполненными измерениями. На фиг.5 приведен вариант представления массива данных результатов обноски, а на фиг.6 - порядок формирования скорректированного массива эталонного набора разностей фаз. В дальнейшем на этапе работы в качестве эталонного набора разностей фаз используют скорректированный эталонный набор разностей фаз Δφl,h,k,m,ν ск.
При обнаружении сигнала в заданной полосе частот ΔF формируют массив измеренных ППИП Δφl,h,k,m,ν изм (см. фиг.7), структура представления информации в котором аналогична выше рассмотренной на фиг.4-6. Для этого в пеленгаторе все измеренные значения Δφl,h,k,m,ν изм для всех сочетаний пар антенных элементов Al,h всех V частотных поддиапазонов оформляют в соответствующий массив ППИП.
Выполнение последующих операций в предлагаемом способе пеленгации осуществляется аналогично способу-прототипу. Последовательно для всех направлений Δθk, k=1,2,…,K; K·Δθk=2π и всех углов места Δβm, m=1,2,…,M; M·Δβm=π/2 вычисляют разность между скорректированными эталонными Δφl,h,k,m,ν ск и измеренными Δφl,h,k,m,ν изм ППИП, которые возводятся в квадрат и суммируют в соответствии с выражением

На фиг.8 иллюстрируется порядок вычисления сумм Hθ,β,ν в поддиапазоне Δfν для Δθl различных значений угла места Δβm. Для каждого направления Δθk, k=1,2,…,K, формируется вектор-столбец Hθ,β,ν размерности M из соответствующих значений Hθ,β,ν.
Определение наиболее вероятного направления прихода радиосигнала в горизонтальной и угломестной плоскостях по аналогии с прототипом осуществляется путем поиска наименьшей суммы Hθ,β,ν квадратов невязок среди Hθ,β,ν для всех V частотных поддиапазонов.
Адаптивный пеленгатор (см. фиг.1) содержит антенную решетку 1, выполненную из N антенных элементов в количестве более двух, в качестве опорного антенного элемента, в которой поочередно применяют все антенные элементы антенной решетки 1, которые располагают в плоскости пеленгования с согласованным с местными условиями вариантом их размещения, а расстояния между антенными элементами ограничиваются требованиями, обусловленными используемым частотным диапазоном, антенный коммутатор 2, который содержит N входов и два выхода, выполненный с возможностью синхронного подключения очередной пары антенных элементов к сигнальному и опорному выходам коммутатора 2 соответственно, выходы антенных элементов антенной решетки 1 подсоединены к соответствующим входам антенного коммутатора 2, а выходы коммутатора 2 соединены соответственно с двумя входами приемника 3, выполненного двухканальным с опорным и сигнальным каналами и с общими гетеродинами, аналого-цифровой преобразователь 4 и блок преобразования Фурье 5 выполнены двухканальными и соединены последовательно, причем опорный выход приемника 3 соединен с первым входом аналого-цифрового преобразователя 4, второй вход которого соединен с сигнальным выходом приемника 3, последовательно соединенные умножитель 10, сумматор 11, второе запоминающее устройство 12 и блок определения азимута и угла места 13, а также первое 7, третье 18 запоминающие устройства и генератор синхроимпульсов 8, выполненный с возможностью подачи команд на управляющий вход коммутатора 2 для последовательного во времени подключения следующих пар антенных элементов, выход которого подсоединен к управляющему входу антенного коммутатора 2 и к синхровходам аналого-цифрового преобразователя 4, блока преобразования Фурье 5, блока формирования эталонных значений разностей фаз 27, первого 7, второго 12 и третьего 18 запоминающих устройств, блока вычисления разности фаз 6, блока вычитания 9, умножителя 10, сумматора 11, блока определения азимута и угла места 13, первая группа выходов которого является угломестной выходной шиной 14 β адаптивного пеленгатора, а вторая группа выходов - азимутальной выходной шиной 15 θ адаптивного пеленгатора, первая входная установочная шина 29, которая соединена с группой информационных входов блока формирования эталонных значений разностей фаз 27, а первый и второй информационные выходы блока преобразования Фурье 5 соединены соответственно с первым и вторым информационными входами блока вычисления разностей фаз 6, первая группа информационных выходов которого соединена с группой информационных входов первого запоминающего устройства 7, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания 9, а первая и вторая группы входов умножителя 10 поразрядно объединены и соединены с группой информационных выходов блока вычитания 9.
Для повышения точности измерения пространственных параметров источников радиоизлучений дополнительно введены первый 19 и второй 26 модемы с подсоединенными к каждому из них приемной 21, 23 и передающей 22, 24 антеннами соответственно, блок ключей 20, четвертое запоминающее устройство 25, радионавигатор 30, генератор гармонических сигналов 31 с подсоединенной к нему передающей антенной 32, блок управления 16, предназначенный для обеспечения одновременной настройки приемника 3 и генератора гармонических сигналов 31 на заданную частоту fν и вычисления пространственных параметров {θk, βm}г генератора гармонических сигналов 31, дешифратор 28 и вторая входная установочная шина 17, причем группа адресных входов третьего запоминающего устройство 18 соединена со второй группой информационных выходов блока управления 16, группа информационных входов блока 18 соединена со второй группой информационных выходов блока вычисления разности фаз 6, а группа информационных выходов третьего запоминающего устройства 18 соединена с первой группой информационных входов блока ключей 20. Группа информационных выходов блока ключей 20 соединена с группой входов уменьшаемого блока вычитания 9. Вход управления блока ключей 20 соединен с третьим выходом блока управления 16, первая группа информационных выходов которого соединена с группой входов управления приемника 3. Первая группа входов блока управления 16 является второй входной установочной шиной 17 адаптивного пеленгатора. Четвертая группа информационных выходов блока управления 16 соединена со второй группой информационных входов первого модема 19, а вторая группа информационных выходов первого модема 19 соединена со второй группой информационных входов блока управления 16. Вторая группа информационных входов блока ключей 20 соединена с группой информационных выходов четвертого запоминающего устройства 25, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных разностей фаз 27. Вход синхронизации блока 27 объединен со входами синхронизации четвертого запоминающего устройства 25 и блока управления 16. Группа информационных входов генератора гармонических сигналов 31 соединена с группой информационных выходов дешифратора 28, группа информационных входов которого соединена со второй группой информационных выходов второго модема 26, вторая группа входов которого соединена с группой информационных выходов радионавигатора 30.
На фиг.1 приведен вариант реализации адаптивного пеленгатора согласно заявленному изобретению для случая, когда проблем с обноской нет (генератор 31 может быть размещен в любой точке сферы над антенной решеткой 1).
Адаптивный пеленгатор (см. фиг.1) работает следующим образом. Перед началом работы пеленгатора рассчитывают эталонные значения первичных пространственно-информационных параметров Δφl,h,ν для средних частот всех поддиапазонов fν=Δf(2ν-1)/2. Ширина поддиапазонов Δfν определяется минимальной шириной пропускания приемных трактов пеленгатора. Для этого предварительно осуществляют описание пространственных характеристик антенной решетки 1. С этой целью измеряют взаимные расстояния между антенными элементами Al,h решетки 1 при их размещении на горизонтальной плоскости. В общем случае (Zl,h≠0) используют расстояния между проекциями пространственного размещения антенных элементов на горизонтальную плоскость, проходящие через первый антенный элемент. В этом случае для каждого антенного элемента дополнительно измеряют значения {Zl,h} как {Zl,h}={Zl}-{Zh}. Результаты измерений по шине 29 (см. фиг.1) поступают на вход блока формирования эталонных значений разностей фаз 27. Здесь по известному алгоритму (см. пат. RU №2283505, МПК7 G01S 13/46, опубл. 10.09.2006 г., бюл. №25; пат. RU №2263328, опубл. 24.05.2004 г., бюл. №30) вычисляют значения Δφl,h,ν эт, которые в дальнейшем хранятся в четвертом запоминающем устройстве 25 (см. фиг.4). По шине 29 вводится склонение θскл антенной решетки 1 относительно направления на север, например, как угол между векторами, проходящими через первый и второй антенные элементы, центр антенной решетки и направлением на север. Выполнение этих операций подготавливает пеленгатор к работе. Эталонные значения разностей фаз Δφl,h,k,m,ν эт, хранящиеся в четвертом запоминающем устройстве 25, через блок ключей 20 подаются на группу входов уменьшаемого блока вычитания 9. Однако при наличии временных и материальных ресурсов, предложенных авторами, точность его измерений может быть увеличена в результате выполнения обноски (снятия девиации). Особенности ее реализации позволяют максимально учесть искажения фронта электромагнитной волны. С этой целью генератор 31 относят на значительное расстояние от адаптивного пеленгатора r>2·(2b)2/λ, где 2b - расстояние между антенными элементами в решетке 1.
На вторую входную установочную шину 17 поступают данные о координатах местоположения адаптивного пеленгатора {х, y, z}п, ширине рабочей полосы частот ΔF и шаге дискретной перестройки Δfν.
Блок управления 16 (см. фиг.2) формирует команду на одновременную перестройку приемника 3 и генератора 31 на заданную частоту fν. Команда о перестройке генератора 31 последовательно проходит через первый модем 19 и его передающую антенну 22 и далее через приемную антенну 23, второй модем 26, дешифратор 28 на управляющий вход блока 31. В задачу дешифратора 28 входит преобразование управляющей команды блока 16 к виду, необходимому для правильного ее восприятия генератором 31 (функция согласования).
По команде блока управления 16 генератор 31 настраивается на заданную частоту fν и излучает гармонический сигнал. Далее по команде блока 16 приемник 3 и генератор 31 одновременно перестраивают на очередную частоту fν+1 и т.д. в полосе ΔF.
При этом радионавигатором 30, находящимся в непосредственной близости с генератором гармонических сигналов 31, определяют его координаты {х, y, z}г. Полученные данные о местоположении генератора через первый 19 и второй 26 модемы по каналу передачи данных поступают на блок управления 16. На каждой частоте fν, ν=1,2,…,V измеряют разности фаз Δφl,h,k,m,ν обн сигналов между антенными элементами решетки 1. Данную операцию выполняют блоки 1-7 по известному алгоритму (аналогично устройству-прототипу).
На основе данных о местоположении выносного генератора гармонических сигналов 31 и адаптивного пеленгатора в блоке 16 вычисляют пространственные параметры на генератор гармонических сигналов {θk, βm}г. Измеренные разности фаз Δφl,h,k,m,ν обн со второй группы информационных выходов блока 6 поступают на группу информационных входов третьего запоминающего устройства 18, где в виде блока записывают по адресу {θk, βm}. Информация об адресе на блок 18 поступает с информационных выходов блока управления 16, форма представления результатов обноски в блоке 18 приведена на фиг.5.
Последовательно перемещают генератор гармонических сигналов по сфере относительно антенной решетки 1 адаптивного пеленгатора с заданной дискретностью в горизонтальной Δθk и угломестной Δβm плоскостях, k=1,2,…,K, m=1,2,…,M. В каждой точке измеряют пространственные параметры на генератор гармонических сигналов 31 и соответствующие им разности фаз Δφl,h,k,m,ν обн в антенных элементах, по соответствующим адресам запоминают полученные разности фаз (блок 18).
Завершение операции обноски пеленгатора (прохождение генератором 31 K·M точек) для устройства по фиг.1 соответствует формированию скорректированного эталонного набора разностей фаз. В этом случае по сигналу блока 16, поступающему на управляющие входы блока ключей 20, информационные выходы блока 18 подключаются к группе входов уменьшаемого блока вычитания 9.
Однако на практике наиболее распространенной является ситуация, когда обноска невозможна в ряде направлений. В этом случае скорректированный эталонный набор разностей фаз Δφl,h,k,m,ν ск формируют из совокупности Δφl,h,k,m,ν эт и Δφl,h,k,m,ν обн путем замены в первой из них элементов, по которым были получены измерения при обноске. Схема устройства (см. фиг.1) несколько упрощается. Исключаются блоки 18 и 20. Группа адресных входов блока 25 подключается ко второй группе информационных выходов блока управления 16. В блоке 16 исключается третий выход, а вторая группа информационных выходов блока 6 подключается к группе информационных входов блока 25, вместо блока 27. Для исключения неоднозначности после записи в блок 25 на предыдущем этапе значений Δφl,h,k,m,ν эт информационные выходы блока 27 отключаются.
В процессе работы адаптивного пеленгатора с помощью блоков с 1-го по 13-й (см. фиг.1) осуществляют поиск и обнаружение сигналов источников радиоизлучений в заданной полосе частот ΔF. Принимаемые антенной решеткой 1 сигналы на частоте fν поступают на соответствующие входы антенного коммутатора 2. В задачу последнего входит обеспечение синхронного подключения в едином промежутке времени любых пар антенных элементов к опорному и сигнальному выходам. В результате последовательно во времени на оба сигнальных входа двухканального приемника 3 поступают сигналы со всех возможных пар антенных элементов решетки 1. При этом все антенные элементы периодически выступают в качестве как сигнальных, так и в качестве опорных (при условии использования полнодоступного коммутатора 2). Этим достигается максимальный набор статистики о пространственных параметрах электромагнитного поля.
Сигналы, поступающие на входы приемника 3, усиливают, фильтруют и переносят на промежуточную частоту, например 10,7 МГц. С опорного и сигнального выходов промежуточной частоты приемника 3 сигналы поступают на соответствующие входы аналого-цифрового преобразователя (АЦП) 4, где синхронно преобразуются в цифровую форму. Полученные цифровые отсчеты сигналов антенных элементов Al и Ah в блоке 4 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые друг относительно друга на π/2. В результате в блоке 4 формируют четыре последовательности отсчетов (квадратурные составляющие сигналов от двух антенных элементов Al и Ah). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 4 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в пат. RU №2263328 и пат. RU №2283505.
На завершающем этапе в блоке 4 формируют две комплексные последовательности отсчетов путем попарного объединения соответствующих отсчетов скорректированных последовательностей.
Сигналы с выходов аналого-цифрового преобразователя 4 поступают на соответствующие входы блока преобразования Фурье 5. В результате выполнения в блоке 5 операции в соответствии с выражением  получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в антенных элементах A1 и Ah, а следовательно, их фазовые характеристики. Однако этого недостаточно для измерения Δφl,h,ν изм в парах антенных элементов A1 и Ah.
получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в антенных элементах A1 и Ah, а следовательно, их фазовые характеристики. Однако этого недостаточно для измерения Δφl,h,ν изм в парах антенных элементов A1 и Ah.
Последнее предполагает вычисление функции взаимной корреляции сигналов в соответствии с выражением

где l,h=1,2,…,N, l≠h - номер антенного элемента. На его основе определяют Δφl,h,ν изм как

Функция (6) выполняется блоком вычисления разности фаз 6. В устройстве-прототипе (см. пат. RU №2263327, МПК7 G01S 3/14, опубл. 27.10.2005 г., бюл. №30, стр.10) подробно рассмотрена возможность нахождения аналогичным блоком 6 (прототипа) разности фаз Δφl,h,ν изм. В предлагаемом устройстве измеренные значения Δφl,h,ν изм очередным импульсом генератора 8 записывают в первое запоминающее устройство 7. Данная операция повторяется до тех пор, пока не будут записаны в этот блок значения ППИП для всех возможных сочетаний пар антенных элементов. Выполнение этой операции соответствует формированию массивов измеренных ППИП Δφl,h,ν изм (см. фиг.7).
Основное назначение блоков 9, 10, 11, 12, 13 и 25, 27 состоит в том, чтобы оценить степень отличия измеренных параметров Δφl,h,ν изм (см. фиг.7) от скорректированных эталонных значений (см. фиг.6), определенных для всех направлений прихода сигнала Δθk и Δβm и всех fν (см. выражение 4). Данная операция осуществляется в соответствии с алгоритмом, приведенным на фиг.8, следующим образом. Скорректированные эталонные значения Δφl,h,k,m,ν ск, хранящиеся в запоминающем устройстве 18(25), поступают на вход уменьшаемого блока вычитания 9. На вход вычитаемого блока 9 поступают измеренные значения Δφl,h,ν изм с выхода блока 7. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар антенных элементов. Например, из Δφ2,7,ν изм поочередно вычитаются только значения Δφ2,7,k,m,ν ск для всех направлений прихода сигнала Δθk и Δβm.
На следующем этапе полученные разности возводятся в квадрат в блоке 10. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значение. В противном случае могла возникнуть ситуация, когда сумма положительных и отрицательных разностей  компенсировали друг друга. Для возведения в квадрат каждый результат вычислений умножается на себя в блоке 10. Полученные квадраты разностей складывают в первом сумматоре 11 и записывают во второе запоминающее устройство 12. В результате в блоке 12 формируется массив данных Hθ,β,ν, на основе которого могут быть получены искомые параметры θ и β. Эта операция осуществляется блоком 13 путем поиска минимальной суммы Hθ,β,ν в массиве данных Hθ,β,ν.
компенсировали друг друга. Для возведения в квадрат каждый результат вычислений умножается на себя в блоке 10. Полученные квадраты разностей складывают в первом сумматоре 11 и записывают во второе запоминающее устройство 12. В результате в блоке 12 формируется массив данных Hθ,β,ν, на основе которого могут быть получены искомые параметры θ и β. Эта операция осуществляется блоком 13 путем поиска минимальной суммы Hθ,β,ν в массиве данных Hθ,β,ν.
Результаты измерений пространственных параметров θk и βm очередным импульсом генератора 8 поступают на выходные шины пеленгатора 14 и 15.
На фиг.9а представлен вариант фазовой свертки сигнала Hθ,ν обн в горизонтальной плоскости на частоте fν при выполнении обноски адаптивного пеленгатора с направления θ=150°. Последняя выполнена в соответствии с заявленным изобретением. Минимум Hθ,ν обн совпадает с истинным направлением θ=150°. Кроме названного имеют место локальные минимумы с направлений 215° и 291° градусов, природа возникновения которых обусловлена различными местными предметами.
На фиг.9б приведена фазовая свертка сигнала Hθ,ν изм без учета результатов обноски. Априорно известный удаленный источник излучения находился примерно под тем же углом θИРИ=150°. Однако из рассмотрения фиг.9б следует, что в свертке присутствует в силу разных причин два контрастно выраженных минимума, а минимум с направления θ=120° преобладает. В устройстве-прототипе это приводит к принятию ложного решения о направлении на источник излучения θИРИ=120°.
В предлагаемых способе и устройстве данная ошибка исключена (см. фиг.9в). С помощью результатов обноски  , несущих максимум информации о влиянии местных предметов на частоте fν на фронт волны сигнала, степени взаимного влияния антенных элементов антенной решетки 1 друг на друга на этой частоте и др., позволяет исключить принятие ложного решения.
, несущих максимум информации о влиянии местных предметов на частоте fν на фронт волны сигнала, степени взаимного влияния антенных элементов антенной решетки 1 друг на друга на этой частоте и др., позволяет исключить принятие ложного решения.
В устройстве, реализующем предложенный способ, используются известные элементы и блоки, описанные в научно-технической литературе. Блоки 1-13, 18, 25 и 27 выполняются аналогично соответствующим блокам устройства прототипа.
Варианты реализации антенных элементов и антенной решетки 1 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и Связь. 1997; Torriere D.J. Principles of military communication system. Dedham, Massachusetts. Artech Hause, inc., 1981. - 298 p.).
Антенные коммутаторы 2 широко известны (см. Вениаминов В.Н. и др. Микросхемы и их применения. - М.: Радио и Связь, 1989. - 240 с.; Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и Связь, 1987. - 120 с.).
Приемник 3 может быть реализован с помощью двух полупрофессиональных приемников типа IC-R8500 фирмы ICOM (см. Communication Receiver IC-R8500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используют одновременно в качестве первого и второго гетеродинов второго приемника. Кроме того, в качестве приемника 3 могут быть попарно использованы и другие приемники фирмы ICOM: IC-R7000, IC-PCR1000.
Двухканальный аналого-цифровой преобразователь 4, блок преобразования Фурье 5, дешифратор 28, блок управления 16, второе запоминающее устройство 12, блок вычисления разности фаз 6 реализуют с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v3.2 на процессоре Share. ADSP-21062. Руководство пользователя (см. WWW-cepBep: www.insys.ru). Субмодуль ADMDDC2WB реализует функции блока 4 и содержит микросхемы DIGITAL DOWN CONVERTER (DDC) AD6620 фирмы Analog Devices для извлечения полосы частот из широкой полосы частот входного сигнала (например, сигнала второй промежуточной частоты приемника 3 IC-R8500), преобразования этой полосы в полосу модулирующих частот и вывод ее в квадратуре. Это преобразование выполняют смещением интересующей полосы частот к нулевой частоте при цифровом умножении данных от АЦП на квадратурное опорное колебание внутреннего генератора DDC.
Субмодуль цифрового приема ADMDDC2WB используется в несущих платах типа ADP60ISA, ADP60PCI, ADP62PCI. Базовый модуль на базе платы ADP60PCI v3.2 на процессоре Share ADSP-21062 реализует функцию дискретного преобразования Фурье (выражение 1, блок 5), операцию умножения на комплексно-сопряженную пару отсчетов каналов (выражение 2, блок 6), нахождение разности фаз сигналов (блок 6), обнаружение сигнала, если таковое используется, запоминание измеренных разностей фаз (функция блока 7).
Построение генераторов синхроимпульсов 8 известно и широко освещено в литературе (Радиоприемные устройства: Учебн. пособие для радиотехники спец. ВУЗов / Ю.Т.Давыдов и др.; - М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсаторов помех: Часть II. В.В.Никитченко. - Л.: ВАС, 1990. - 176 с.).
С помощью блоков 9, 10 и 11 реализуют выражение 3 описания. Варианты выполнения сумматора 13 и блока вычитания 9 приведены, например, в (Ред. Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Третье 18 и четвертое 25 запоминающие устройства реализованы по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю.Гордонов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.). Умножитель 10 реализует операцию возведения в квадрат, а его выполнение освещено в литературе (Рэд. Э. Справочное пособие по высокоточной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир. 1990. - 256 с.).
Блок формирования эталонных значений разностей фаз 27 предназначен для создания таблиц эталонных значений разностей фаз для различных пар элементов антенной решетки 1 и различных поддиапазонов частот fν.
На подготовительном этапе по первой входной установочной шине 29 задаются следующие исходные данные:
сектор обработки по азимуту (θmin, θmax) и углу места (βmin, βmax);
точность нахождения пространственных параметров Δθ и Δβ;
удаление эталонных источников D;
топология размещения антенных элементов {rn},где rn=(xn, yn, zn)
диапазон частот приемника и генератора ΔF;
шаг перестройки частоты генератора и приемника Δfν.
По второй входной установочной шине 17 задаются следующие исходные данные:
координаты адаптивного пеленгатора {x, y, z}n;
диапазон рабочих частот приемника и генератора ΔF;
шаг перестройки частоты генератора и приемника Δfν.
Величины (θmin, θmax) задаются пользователем исходя из задач, стоящих перед измерителем. В общем случае θmin=0°, а θmax=360°. Точность нахождения пространственных параметров Δθ и Δβ ограничивается значением инструментальной точности устройства измерения. Последняя, в свою очередь, зависит от типа (размеров и геометрии используемой) APl, частотного диапазона, условий распространения радиоволн, вида модуляции сигнала и т.д. Задача блока 27 состоит в том, чтобы для каждого частотного поддиапазона для заданной топологии AP1 с дискретами по азимуту и углу места рассчитать идеальные (эталонные) значения разностей фаз для всех пар антенных элементов с учетом того, что эталонный источник перемещается на удалении D от AP1. Реализация блока 27 и алгоритм его работы аналогичны соответствующему блоку устройства-прототипа.
Первый 19 и второй 26 модемы могут быть реализованы на базе изделий ASUS DSL-N13 или D-Link DSL-2600U/BRU/C.
Радионавигатор 30 может быть реализован на базе навигационного радиоприемного устройства GARMIN GPS60.
Генератор гармонических сигналов может быть реализован на базе генератора сигналов ROHDE&SHWARZ SM300.
Блок 16 предназначен для обеспечения одновременной настройки приемника 3 и генератора гармонических сигналов 31 на заданную частоту Δfν и вычисление пространственных параметров {θk, βm}г генератора гармонических сигналов 31. Блок управления 16 может быть выполнен в виде автомата, реализованного на базе микропроцессора (см., например, Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп. - М.: Радио и связь, 1990. - 512 с.) и работающего в соответствии с алгоритмом, приведенным на фиг.2. В качестве последнего целесообразно использовать высокопроизводительный 16-разрядный микропроцессор К1810 ВМ86 (см. Вениаминов В.Н. и др. Микросхемы и их применение: Справ. пособ. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989. - 240 с.).
Реализация блока определения азимута и угла места 13 известна и широко освещена в литературе, выполняет аналогичную функцию блока 13 устройства-прототипа. Блок 13 целесообразно реализовывать по пирамидальной схеме с использованием быстродействующих компараторов (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп.- М.: Радио и связь, 1990. - 512 с.).
Дешифратор 28 предназначен для преобразования управляющей команды блока управления 16 к виду, необходимому для управления генератором 31, может быть реализован на базе перепрограммируемых постоянных запоминающих устройств (см. Большие интегральные схемы запоминающих устройств. Справочник / А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.).
Блок ключей 20 предназначен для переключения режимов работы пеленгатора, реализуется набором ключей по известным схемам (см. Сикарев А.А., Лебедев О.Н. Микроэлектронные устройства формирования и обработки сложных сигналов. - М.: Радио и связь, 1983. - 216 с., ил.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505832C2 |
| СПОСОБ МНОГОКАНАЛЬНОГО АДАПТИВНОГО ПРИЕМА РАДИОСИГНАЛОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2477551C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |

Изобретение может быть использовано в навигационных, пеленгационных, локационных средствах. Достигаемый технический результат - разработка способа адаптивного измерения пространственных параметров источников радиоизлучений и устройства для его осуществления, обеспечивающих более высокую точность измерения пространственных параметров радиосигналов: азимута и угла места. Способ включает прием радиосигналов антенной решеткой, выполненной из N>2 элементов, преобразование принятых радиосигналов в высокочастотные электрические сигналы на промежуточной частоте и далее - в цифровую форму, вычитание из скорректированных эталонных разностей фаз с учетом обноски пеленгатора соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок, их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, определение наиболее вероятного направления прихода радиосигнала по наименьшей сумме квадратов невязок. В устройстве, реализующем способ, дополнительно введены первый и второй модемы с подсоединенными к каждому из них приемной и передающей антеннами, блок ключей, четвертое запоминающее устройство, радионавигатор, генератор гармонических сигналов с подсоединенной к нему передающей антенной, блок управления, дешифратор и вторая входная установочная шина. 2 н.п. ф-лы, 9 ил.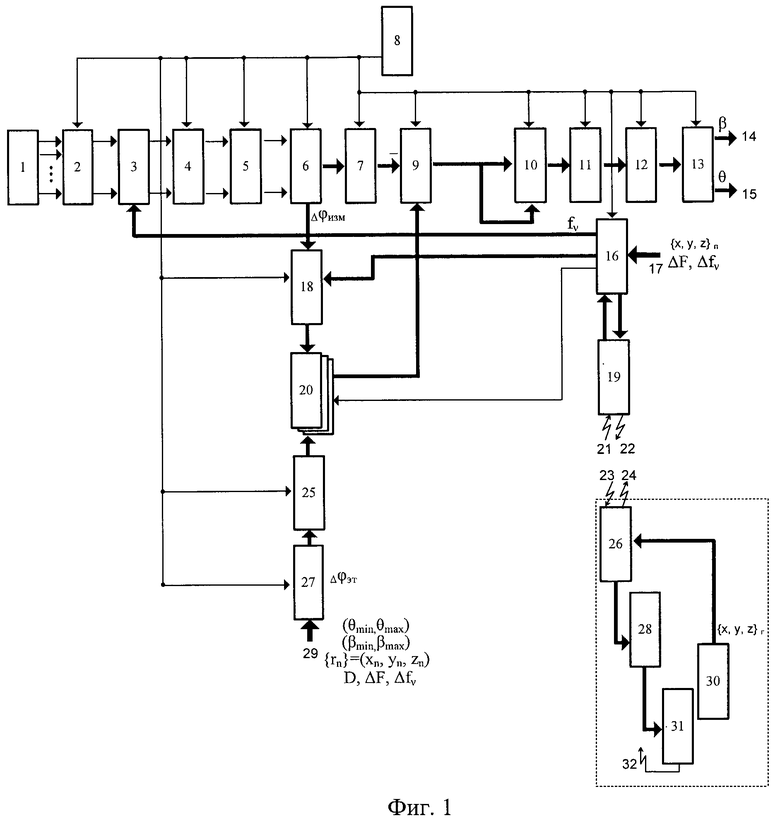
1. Способ адаптивного измерения пространственных параметров источников радиоизлучений, включающий прием радиосигналов в соответствующем поддиапазоне частот Δfν, Δfν∈ΔF, ν=1, 2, …V, V=ΔF/Δf, антенной решеткой, состоящей из N идентичных ненаправленных антенных элементов, где N>2, расположенных в плоскости пеленгования и согласованных с местными условиями вариантом размещения, последовательное синхронное преобразование высокочастотных сигналов каждой пары антенных элементов антенной решетки в электрические сигналы промежуточной частоты, причем в качестве опорного антенного элемента поочередно применяются все антенные элементы антенной решетки, дискретизацию сигналов и их квантование, формирование из них четырех последовательностей отсчетов путем разделения на квадратурные составляющие, запоминание в каждой последовательности заданного числа В отсчетов квадратурных составляющих сигналов, коррекцию запомненных отсчетов последовательностей квадратурных составляющих путем последовательного умножения каждого из них на соответствующий отсчет заданного временного окна, формирование из скорректированных последовательностей квадратурных составляющих отсчетов сигналов двух комплексных последовательностей отсчетов сигналов, элементы которых определяют путем попарного объединения соответствующих отсчетов скорректированных последовательностей квадратурных составляющих сигналов антенных элементов, преобразование обеих комплексных последовательностей отсчетов сигналов с помощью дискретного преобразования Фурье, попарное перемножение отсчетов сигнала преобразованной последовательности одного антенного элемента Аl на соответствующие комплексно сопряженные отсчеты сигнала преобразованной последовательности на той же частоте другого антенного элемента Аh, где l, h=1, 2, …, N, l≠h, расчет для текущей пары антенных элементов разности фаз сигналов для каждого частотного поддиапазона, запоминание полученных разностей фаз радиосигналов, вычисление и запоминание эталонного набора разностей фаз сигналов Δφl,h,k,m,ν эm исходя из пространственного размещения антенных элементов антенной решетки l и h, используемого частотного диапазона Δfν и заданной точности измерений пространственных параметров сигналов в горизонтальной Δθ и угломестной Δβ плоскостях, вычитание из эталонных разностей фаз сигналов соответствующих значений измеренных разностей фаз, возведение в квадрат полученных значений невязок и их суммирование по всем парам антенных элементов и всем частотным поддиапазонам, запоминание полученных сумм, находящихся в однозначном соответствии с направлениями прихода радиосигналов, определение наиболее вероятного направления прихода радиосигнала в горизонтальной θс и угломестной βc плоскостях по наименьшей сумме квадратов невязок, отличающийся тем, что на подготовительном этапе выносным генератором на удалении нескольких длин волн излучают гармонические сигналы в заданной полосе частот ΔF с дискретностью Δfν, одновременно определяют координаты генератора гармонических сигналов {х, у, z}г, на основе данных о местоположении выносного генератора гармонических сигналов и адаптивного устройства измерения пространственных параметров источников радиоизлучений вычисляют пространственные параметры генератора гармонических сигналов {θk, βm}г, k=1, 2, …, K, m=1, 2, …, M, запоминают измеренные разности фаз сигналов Δφl,h,k,m,ν обн в антенных элементах l и h для данного местоположения генератора гармонических сигналов и соответствующего частотного поддиапазона Δfν, последовательно перемещают генератор гармонических сигналов по сфере относительно антенной решетки адаптивного устройства измерения пространственных параметров источников радиоизлучений с заданной дискретностью в горизонтальной Δθ и угломестной Δβ плоскостях, в каждой точке измеряют пространственные параметры на генератор гармонических сигналов и соответствующие им разности фаз Δφl,h,k,m,ν обн в антенных элементах, запоминают полученные разности фаз, формируют скорректированный эталонный набор разностей фаз Δφl,h,k,m,ν ск путем замены рассчитанных эталонных разностей фаз Δφl,h,k,m,ν эт на соответствующие измеренные значения разностей фаз Δφl,h,k,m,ν обн, а в процессе работы в качестве эталонного набора разностей фаз используют скорректированный эталонный набор разностей фаз.
2. Адаптивный пеленгатор, содержащий антенную решетку, выполненную из N антенных элементов в количестве более двух, в качестве опорного антенного элемента, в которой поочередно применяют все антенные элементы антенной решетки, которые располагают в плоскости пеленгования с согласованным с местными условиями вариантом их размещения, а расстояния между антенными элементами ограничиваются требованиями, обусловленными используемым частотным диапазоном, антенный коммутатор, который содержит N входов и два выхода, выполненный с возможностью синхронного подключения очередной пары антенных элементов к сигнальному и опорному выходам коммутатора соответственно, выходы антенных элементов антенной решетки подсоединены к соответствующим входам антенного коммутатора, а выходы антенного коммутатора соединены соответственно с двумя входами приемника, выполненного двухканальным с опорным и сигнальным каналами и с общими гетеродинами, аналого-цифровой преобразователь и блок преобразования Фурье, выполнены двухканальными и соединены последовательно, причем опорный выход приемника соединен с первым входом аналого-цифрового преобразователя, второй вход которого соединен с сигнальным выходом приемника, последовательно соединенные умножитель, сумматор, второе запоминающее устройство и блок определения азимута и угла места, а также первое, третье запоминающие устройства и генератор синхроимпульсов, выполненный с возможностью подачи команд на управляющий вход коммутатора для последовательного во времени подключения следующих пар антенных элементов, выход которого подсоединен к управляющему входу антенного коммутатора и к синхровходам аналого-цифрового преобразователя, блока преобразования Фурье, блока формирования эталонных значений разностей фаз, первого, второго и третьего запоминающих устройств, блока вычисления разности фаз, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, первая группа выходов которого является угломестной выходной шиной β адаптивного пеленгатора, а вторая группа выходов - азимутальной выходной шиной θ адаптивного пеленгатора, первая входная установочная шина, которая соединена с группой информационных входов блока формирования эталонных значений разностей фаз, а первый и второй информационные выходы блока преобразования Фурье соединены соответственно с первым и вторым информационными входами блока вычисления разности фаз, первая группа информационных выходов которого соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, а первая и вторая группы входов умножителя поразрядно объединены и соединены с группой информационных выходов блока вычитания, отличающийся тем, что дополнительно введены, первый и второй модемы с подсоединенными к каждому из них приемной и передающей антеннами, блок ключей, четвертое запоминающее устройство, радионавигатор, генератор гармонических сигналов с подсоединенной к нему передающей антенной, блок управления, предназначенный для обеспечения одновременной настройки приемника и генератора гармонических сигналов на заданную частоту fν и вычисление пространственных параметров {θk, βm}г генератора гармонических сигналов, дешифратор и вторая входная установочная шина, причем группа адресных входов третьего запоминающего устройства соединена со второй группой информационных выходов блока управления, группа информационных входов соединена со второй группой информационных выходов блока вычисления разности фаз, группа информационных выходов третьего запоминающего устройства соединена с первой группой информационных входов блока ключей, группа информационных выходов которого соединена с группой входов уменьшаемого блока вычитания, вход управления блока ключей соединен с третьим выходом блока управления, первая группа информационных выходов которого соединена с группой входов управления приемника, первая группа входов блока управления является второй входной установочной шиной адаптивного пеленгатора, четвертая группа информационных выходов блока управления соединена со второй группой информационных входов первого модема, вторая группа информационных выходов которого соединена со второй группой информационных входов блока управления, вторая группа информационных входов блока ключей соединена с группой информационных выходов четвертого запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных разностей фаз, вход синхронизации которого объединен со входами синхронизации четвертого запоминающего устройства и блока управления, группа информационных входов генератора гармонических сигналов соединена с группой информационных выходов дешифратора, группа информационных входов которого соединена со второй группой информационных выходов второго модема, вторая группа входов которого соединена с группой информационных выходов радионавигатора.
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| US 5406291 A, 11.04.1995 | |||
| WO 2005045459 A2, 19.05.2005 | |||
| WO 03032004 A2, 17.04.2003 | |||
| Приспособление для обработки клубней картофеля защитно-стимулирующими жидкостями при посадке | 2018 |
|
RU2693258C1 |

