Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения априорно неизвестного источника радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС).
Известен разностно-дальномерный способ определения координат источника радиоизлучения (см. пат. США №4393382, МКИ G01S 11/00, пат. США №4316193, МКИ G01S 3/02; 3/4, пат. США №4339755, МКИ G01S 1 5/04, пат. РФ №1820142, МПК G01S 13/00, опубл. 27.07.2006 г.). Он заключается в приеме и измерении задержек Δτi, сигнала группой взаимосвязанных с известным местоположением пунктов приема (например, на ЛПС), решении гиперболических уравнений на центральном приемном пункте, на основе которого определяют координаты источника радиоизлучения.
Недостатком аналогов является недопустимо большие ошибки местоопределении ИРИ в случае, когда последний излучает импульсы с высокой частотой следования. Так, в случае, когда период следования импульсов излучателя меньше максимального времени задержки хотя бы на одном из боковых (периферийных) постов, возникает неоднозначность в определении координат, устранить которую практически невозможно (см. Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001 г., с.323-324). Способ предъявляет высокие требования к системе единого времени и скорости обмена информацией, что также затрудняет реализацию данного технического решения. Однако наиболее существенный недостаток состоит в невозможности определения координат ИРИ с помощью одного измерителя (реализация способа-аналога базируется на использовании трех и более измерителей, что резко усложняет систему и повышает ее себестоимость).
Известны различные реализации триангуляционного способа местоопределения ИРИ на ЛПС (см. Южаков В.В Современные методы определения местоположения источников электромагнитного излучения // Зарубежная радиоэлектроника, №8, 1987, стр.67-79). В предлагаемых вариантах реализации триангуляционного способа местоопределения измеряется лишь азимут θ на ИРИ, а систематические ошибки в измерениях частично устраняются путем использования особенностей различных траекторий полета ЛПС.
Основными недостатками способов-аналогов являются:
относительно низкая точность определения местоположения ИРИ в связи с тем, что в точках измерения θ не учитываются такие важные параметры пространственного положения ЛПС, как крен klpsi, тангаж llpsi и склонение ζlpsi;
наложение ограничений на маршрут полета ЛПС.
Наиболее близким по технической сущности к заявляемому способу является способ (см. Baron A.R. et al. - Microwave J., 1982, v.25, №9). Он включает прием сигналов ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором на ЛПС, измерение пространственно-информационных параметров обнаруженных сигналов: азимута θi и угла места βi с одновременным определением местоположения ЛПС {Blps, Llps, Hlps}i, где Blps, Llps и Hlps соответственно широта, долгота и высота ЛПС, предварительное определение удаления ИРИ от ЛПС di и координат ИРИ в момент времени ti  в левосторонней системе декартовых координат антенной системы пеленгатора, преобразование предварительных координат ИРИ
в левосторонней системе декартовых координат антенной системы пеленгатора, преобразование предварительных координат ИРИ  в географические координаты
в географические координаты  .
.
Способ-прототип позволяет определять местоположение ИРИ из одной точки, однако точность выполняемых измерений является низкой в силу того обстоятельства, что не учитывается в полном объеме информация о пространственной ориентации ЛПС, а именно о углах крена klpsi, тангажа llpsi и склонения ζlpsi. Известно, что на ЛПС (находящийся в воздухе) воздействуют ветровые и другие возмущения, влияющие на параметры его полета (курсовой угол, тангаж, крен) подвергая их вариациям, что в свою очередь снижает полноту и точность получаемых измерительными системами оценок θ и β (см. В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Сетевые спутниковые радионавигационные системы. / Под. ред. В.С Шебшаевича. - М.: Радио и связь. 1993 г.). Под влиянием ветра продольная ось симметрии ЛПС не совпадает с направлением его перемещения (см. фиг.1а). Практические испытания на самолетах ИЛ-18 и СМ92 (выполненные авторами) показали, что склонение ζlps (угол сноса) может достигать 10-15 градусов. Это подтверждается фиг.1б, где приведена разница путевого и курсового углов при движении самолета по круговой траектории. Изменения углов крена klps и тангажа llps в процессе полета еще более усугубляют ситуацию с оценкой параметров θ и β, а в конечном счете и с точностью местоопределения ИРИ.
Наиболее близким по своей технической сущности к заявляемому устройству определения координат источника радиоизлучения является устройство по пат. РФ №2263327 "Способ пеленгации радиосигналов и пеленгатор для его осуществления", G01S 3/14, опубл. 27.10.2005 г., бюл. №30.
Устройство-прототип содержит антенную решетку, выполненную из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с информационными выходами второго запоминающего устройства, информационные входы которого соединены с информационными выходами блока формирования эталонных значений ППИП, группа информационных входов которого является входной установочной шиной пеленгатора, последовательно соединенные умножитель, сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группа информационных входов умножителя поразрядно объединены и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, а первая и вторые группы информационных выходов блока определения азимута и угла места являются первой и второй выходными шинами устройства.
Целью заявляемых технических решений является разработка способа и устройства определения координат источника радиоизлучения с борта ЛПС, обеспечивающих повышение точности измерения местоположения ИРИ путем более полного учета пространственной ориентации ЛПС (антенной решетки измерителя).
Поставленная цель достигается тем, что в известном способе определения координат источника радиоизлучения, включающем прием сигналов ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором на летно-подъемном средстве (ЛПС), измерение пространственно-информационных параметров обнаруженных сигналов: азимута θi и угла места βi в системе координат антенной системы с одновременным определением местоположения ЛПС {Blps, Llps, Hlps},где Blps, Llps и Hlps соответственно широта, долгота и высота ЛПС, предварительное определение удаления ИРИ от ЛПС di и координат ИРИ в момент времени ti  в левосторонней системе декартовых координат антенной системы пеленгатора, корректируют координаты ИРИ
в левосторонней системе декартовых координат антенной системы пеленгатора, корректируют координаты ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant} путем последовательного умножения значений координат
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant} путем последовательного умножения значений координат  на соответствующие углам Эйлера матрицы поворота. После чего определяют истинные геоцентрические координаты местоположения ИРИ
на соответствующие углам Эйлера матрицы поворота. После чего определяют истинные геоцентрические координаты местоположения ИРИ  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi, курсового угла αlpsi и склонения ζlpsi, а также координат его местоположения: широты Blpsi, долготы Llpsi, и высоты Hlpsi, а склонение ζlpsi определяют как разность между путевым µlpsi и курсовым αlpsi углами ЛПС.
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi, курсового угла αlpsi и склонения ζlpsi, а также координат его местоположения: широты Blpsi, долготы Llpsi, и высоты Hlpsi, а склонение ζlpsi определяют как разность между путевым µlpsi и курсовым αlpsi углами ЛПС.
Преобразуют истинные геоцентрические координаты  местоположения ИРИ в географические координаты
местоположения ИРИ в географические координаты  .
.
При этом для определения курсового угла летно-подъемного средства принимают радиосигналы от космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС), преобразуют высокочастотные сигналы в электрические сигналы промежуточной частоты, дискретизируют их и квантуют, формируют из них две последовательности отсчетов путем разложения на квадратурные составляющие, сравнивают принятые сигналы Pc с заданным порогом Pnop, при выполнении условия Pc>Pnop принимают решение об обнаружении сигналов ГНСС, выполняют частотную и фазовую автоподстройки обнаруженных сигналов, а также автоподстройку по задержке сигналов, выделяют из обнаруженных сигналов навигационные сообщения КА ГНСС и осуществляют их демодуляцию, оценивают навигационные параметры и рассчитывают массив из I векторов состояния ЛПС  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), где VXi, VYi, VZi - величины, описывающие вектор
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), где VXi, VYi, VZi - величины, описывающие вектор  и характеризующие значение путевого угла µi и путевой скорости Vi ЛПС, i=10, 11, …, I, а емкость массива I определяют заданной точностью измерения курсового угла αlpsi. ЛПС в зависимости от геометрии маршрута его полета, оценивают значения воздушных скоростей ЛПС
и характеризующие значение путевого угла µi и путевой скорости Vi ЛПС, i=10, 11, …, I, а емкость массива I определяют заданной точностью измерения курсового угла αlpsi. ЛПС в зависимости от геометрии маршрута его полета, оценивают значения воздушных скоростей ЛПС  ,
,  , …,
, …,  для соответствующих значений вектора состояния
для соответствующих значений вектора состояния  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) в соответствии с выражением
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) в соответствии с выражением
 ,
,
где Vi - i-e значение путевой скорости, µi - i-е значение путевого угла, Ul - l-е оценочное, значение скорости ветра, l=1, 2, …, L, δk - k-e оценочное направление ветра, k=1, 2, …, К, оценивают качество принятого решения о параметрах ветра в соответствии с выражением  , где
, где  и
и  соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора
соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора  для параметров ветра Ul и δk, результаты вычислений f(Ul,δk) сравнивают с пороговым значением fзад(U,δ), определяющим априорно заданную точность оценивания параметров ветра U и δ, при невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения и повторяют процедуру вычисления набора оценочных значений воздушных скоростей, при выполнении на очередной итерации пороговых условий fзад(U, δ)>f(Uc,δd) за параметры ветра принимают соответствующие значения Uc и δd, на основе навигационного треугольника скоростей рассчитывают значения воздушной скорости B(Uc,δd), курсового угла αlps и склонения ζlps в соответствии с выражениями:
для параметров ветра Ul и δk, результаты вычислений f(Ul,δk) сравнивают с пороговым значением fзад(U,δ), определяющим априорно заданную точность оценивания параметров ветра U и δ, при невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения и повторяют процедуру вычисления набора оценочных значений воздушных скоростей, при выполнении на очередной итерации пороговых условий fзад(U, δ)>f(Uc,δd) за параметры ветра принимают соответствующие значения Uc и δd, на основе навигационного треугольника скоростей рассчитывают значения воздушной скорости B(Uc,δd), курсового угла αlps и склонения ζlps в соответствии с выражениями:
 ,
,
 ,
,
 ,
,
а найденные параметры ветра Uc и δd используют в очередном цикле измерений курсового угла αlps и склонения ζlps в качестве средних значений  и
и  ограниченных выборок {U} и {δ} оценочных параметров ветра.
ограниченных выборок {U} и {δ} оценочных параметров ветра.
Благодаря новой совокупности признаков в заявляемом способе достигается более полный учет пространственной ориентации ЛПС (а следовательно, и антенной системы пеленгатора), что и обуславливает положительный эффект в виде повышения точности местоопределения ИРИ.
В заявляемом устройстве определения координат ИРИ поставленная цель достигается тем, что в известном устройстве, состоящем из антенной решетки, выполненной из N>2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования, антенного коммутатора, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифрового преобразователя, выполненного двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блока преобразования Фурье, выполненного двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первого и второго запоминающих устройств, блока вычитания, блока формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блока вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенных умножителя, сумматора, третьего запоминающего устройства, блока определения азимута и угла места, причем первая и вторая группа информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератора синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, дополнительно введены первый вычислитель, предназначенный для определения предварительных координат ИРИ  , второй вычислитель, предназначенный для определения скорректированных координат ИРИ
, второй вычислитель, предназначенный для определения скорректированных координат ИРИ  , третий вычислитель, предназначенный для определения истинных геоцентрических координат ИРИ
, третий вычислитель, предназначенный для определения истинных геоцентрических координат ИРИ  , четвертый вычислитель, предназначенный для преобразования истинных координат ИРИ
, четвертый вычислитель, предназначенный для преобразования истинных координат ИРИ  в географические координаты
в географические координаты  , четвертое запоминающее устройство, радионавигатор и устройство угловой ориентации ЛПС, предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно. Группа информационных выходов четвертого вычислителя является выходной шиной устройства определения координат ИРИ, а первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места. Третья группа информационных входов первого вычислителя соединена со второй группой информационных выходов радионавигатора, первая группа информационных выходов которого соединена с второй группой информационных входов третьего вычислителя и первой группой информационных входов устройства угловой ориентации ЛПС. Вторая, третья и четвертая группы информационных входов устройства угловой ориентации ЛПС являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ. Группа информационных выходов устройства угловой ориентации ЛПС соединена с третьей группой информационных входов третьего вычислителя. Группа информационных выходов четвертого запоминающего устройства соединена со второй группой информационных входов второго вычислителя, а группа информационных входов является второй входной установочной шиной устройства определения координат ИРИ. Входы синхронизации первого, второго, третьего и четвертого вычислителей объединены и соединены с входами синхронизации четвертого запоминающего устройства, устройства угловой ориентации ЛПС и выходом генератора синхроимпульсов.
, четвертое запоминающее устройство, радионавигатор и устройство угловой ориентации ЛПС, предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно. Группа информационных выходов четвертого вычислителя является выходной шиной устройства определения координат ИРИ, а первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места. Третья группа информационных входов первого вычислителя соединена со второй группой информационных выходов радионавигатора, первая группа информационных выходов которого соединена с второй группой информационных входов третьего вычислителя и первой группой информационных входов устройства угловой ориентации ЛПС. Вторая, третья и четвертая группы информационных входов устройства угловой ориентации ЛПС являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ. Группа информационных выходов устройства угловой ориентации ЛПС соединена с третьей группой информационных входов третьего вычислителя. Группа информационных выходов четвертого запоминающего устройства соединена со второй группой информационных входов второго вычислителя, а группа информационных входов является второй входной установочной шиной устройства определения координат ИРИ. Входы синхронизации первого, второго, третьего и четвертого вычислителей объединены и соединены с входами синхронизации четвертого запоминающего устройства, устройства угловой ориентации ЛПС и выходом генератора синхроимпульсов.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения:
повысить точность местоопределения ИРИ за счет более полного и объективного измерения пространственных параметров ЛПС (угла ориентации антенной решетки измерителя) в условиях воздействия на него возмущающих факторов (ветровой нагрузки, выполнения маневров ЛПС и др.).
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг.1 - иллюстрации, объясняющие:
а) отличие путевого µlps и курсового αlps углов ЛПС;
б) отличие путевого и курсового углов при движении самолета по круговой траектории;
на фиг.2 - навигационный треугольник скоростей;
на фиг.3 - порядок изменения ориентации антенной решетки пеленгатора из четырех антенных элементов:
а) исходное состояние антенной решетки;
б) порядок изменения угла lant антенной решетки (тангаж объекта);
в) порядок изменения угла kant антенной решетки (крен объекта);
г) порядок изменения угла αant антенной решетки (азимута или курса объекта);
на фиг.4 - обобщенный алгоритм определения координат ИРИ;
на фиг.5 - экспериментально полученная зависимость вероятности промаха Рпр для различных значений ошибок местоположения П;
на фиг.6 - зависимость точности местоопределения ИРИ от количества выполненных измерений;
на фиг.7 - оценка состоятельности выбранного критерия f (Ul, δk);
на фиг.8 - структурная схема устройства определения координат ИРИ;
на фиг.9 - алгоритм вычисления эталонных значений первичных пространственно-информационных параметров;
на фиг.10 - обобщенная структурная схема устройства угловой ориентации ЛПС;
на фиг.11 - зависимость точности измерения курсового угла  от объема массива векторов состояния ЛПС I для различных условий проведения измерений;
от объема массива векторов состояния ЛПС I для различных условий проведения измерений;
на фиг.12 - структурная схема блока определения оценочных значений воздушных скоростей;
на фиг.13 - структурная схема блока определения воздушной скорости и курсового угла;
на фиг.14 - алгоритм работы блока определения оценочных значений воздушных скоростей  ;
;
на фиг.15 - алгоритм работы блока оценки параметров ветра Ul и δk;
на фиг.16 - алгоритм работы блока определения воздушной скорости В(U,δ) и курсового угла αlps.
Большинство современных способов и устройств определения координат ИРИ с ЛПС, реализующих угломерно-дальномерный способ местоопределения, базируются на использовании глобальных навигационных спутниковых систем (ГНСС) (см. В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Спутниковые радионавигационные системы. /Под. ред. B.C.Шебшаевича. - М.: Радио и связь, 1993, стр.261-275). Однако кроме информации о собственном местоположении ЛПС и направлении его перемещения при решении задач местоопределения ИРИ необходимо знание его пространственной ориентации: крена klpsi, тангажа llpsi, и курсового угла αlpsi (угла сноса или склоненя ζlps), где ζlps=µlpsi-αlpsi, µlpsi - значение путевого угла в момент времени ti (см. фиг.1 и 2). Информацию об этих параметрах ЛПС от ГНСС получить не представляется возможным.
Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе измеряют ориентацию антенной системы пеленгатора в трех плоскостях, принятых в авиации как крена kant, тангажа lant и курса αant (склонения ζant) {kant, lant, ζant} (см. фиг.3) относительно корпуса ЛПС.Значения {kant, lant, ζant} запоминают и в последующем используют для уточнения результатов измерений θi и βi.
В процессе полета ЛПС по аналогии со способом-прототипом в заданной полосе частот ΔF осуществляют поиск и прием сигналов ПРИ, измерение их пространственных параметров: азимута θi и угла места βi в системе координат антенной системы. Одновременно в момент времени ti с помощью ГНСС определяют местоположение собственно ЛПС {Blps, Llps, Hlps}, где Blps, Llps, Hlps соответственно широта, долгота и высота ЛПС. Данную функцию как правило реализуют с помощью GPS навигатора (см. u-blox:http://www.u-blox.com/customersupport/antaris4doc.html). На основе полученных данных осуществляют предварительное определение удаления ИРИ от ЛПС di=Hlpsi/sinβi и его координат  в момент времени ti
в момент времени ti  в левосторонней системе декартовых координат антенной системы пеленгатора:
в левосторонней системе декартовых координат антенной системы пеленгатора:
Данные результаты получены без учета ориентации антенной системы (АС) пеленгатора относительно корпуса ЛПС и собственно ориентации ЛПС в пространстве, выполненную операцию можно интерпретировать следующим образом. По измеренному направлению {θi, βi} откладывают расстояние di и получают вектор - местоположение источника в системе координат АС.
Далее в способе-прототипе полученные координаты (1) для удобства работы переводят в географические  . В качестве одного из направлений дальнейшего повышения точности местоопределения рассматривается возможность учесть ориентацию АС пеленгатора относительно борта ЛПС путем пеленгования и местоопределения реперных станций. Однако без учета пространственных параметров ЛПС {klps, llps, ζlps} в моменты ti измерений {θ, β}i сохраняется достаточно низкая эффективность способа-прототипа. Статистическая обработка серии измерений параметров заданного ИРИ также не дает ожидаемого результата в силу неопределенности ориентации ЛПС в различные моменты времени измерений {θ, β}i.
. В качестве одного из направлений дальнейшего повышения точности местоопределения рассматривается возможность учесть ориентацию АС пеленгатора относительно борта ЛПС путем пеленгования и местоопределения реперных станций. Однако без учета пространственных параметров ЛПС {klps, llps, ζlps} в моменты ti измерений {θ, β}i сохраняется достаточно низкая эффективность способа-прототипа. Статистическая обработка серии измерений параметров заданного ИРИ также не дает ожидаемого результата в силу неопределенности ориентации ЛПС в различные моменты времени измерений {θ, β}i.
В силу названных причин в предлагаемом способе учитывается ориентация АС пеленгатора относительно ЛПС и положение ЛПС в пространстве. Это достигается путем последовательного перехода из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат.
В первом преобразовании учитывают априорно известную ориентацию АС относительно ЛПС (уточняют координаты ИРИ) на основе данных, полученных на подготовительном этапе. Коррекция  осуществляется в плоскости трех углов Эйлера: крена kant, тангажа lant и склонения ζant. Исходный вектор
осуществляется в плоскости трех углов Эйлера: крена kant, тангажа lant и склонения ζant. Исходный вектор  последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг.4)
последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг.4)

где 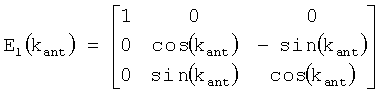 ,
,
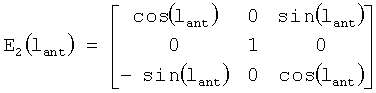 ,
,
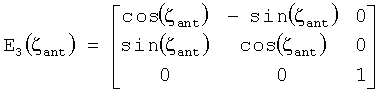 .
.
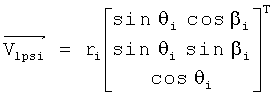
На следующем этапе осуществляют перевод вектора уточненных координат  в геоцентрическую систему координат. Это преобразование учитывает ориентацию ЛПС относительно земной поверхности и положение ЛПС в простаранстве, что позволяет получить истинные геоцентрические координаты ИРИ
в геоцентрическую систему координат. Это преобразование учитывает ориентацию ЛПС относительно земной поверхности и положение ЛПС в простаранстве, что позволяет получить истинные геоцентрические координаты ИРИ  . Ориентация ЛПС обычно задается углами klps, llps и ζlps, которые определяются в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена klps лежит в этой плоскости и направлена на географический север, ось склонения ζlps перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа лежит в указанной плоскости таким образом, что тройка осей представляет правую декартову систему координат (см. фиг.3). Полученный на предыдущем этапе вектор
. Ориентация ЛПС обычно задается углами klps, llps и ζlps, которые определяются в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена klps лежит в этой плоскости и направлена на географический север, ось склонения ζlps перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа лежит в указанной плоскости таким образом, что тройка осей представляет правую декартову систему координат (см. фиг.3). Полученный на предыдущем этапе вектор  последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей).
последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей).
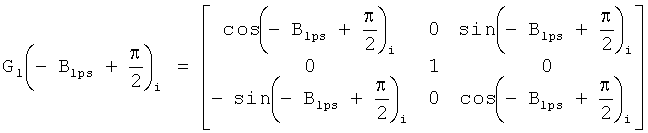
Система координат, в которой на данном этапе находится вектор  , расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть
, расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть  на широту ЛПС Blps и π/2 минус долготу ЛПС Llps, используя матрицы поворота, а затем перенести центр системы координат в центр земли, используя геоцентрические координаты ЛПС. В результате имеем
на широту ЛПС Blps и π/2 минус долготу ЛПС Llps, используя матрицы поворота, а затем перенести центр системы координат в центр земли, используя геоцентрические координаты ЛПС. В результате имеем

где 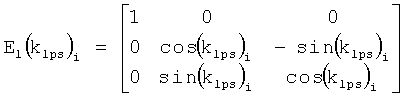 ,
,
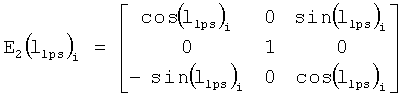 ,
,
 ,
,
 , βi=Llpsi, ri=6370000+Hlpsi,
, βi=Llpsi, ri=6370000+Hlpsi,
 ,
,
 ,
,
 .
.
На завершающем этапе преобразуют истинные геоцентрические координаты  местоположения ИРИ в географические координаты
местоположения ИРИ в географические координаты  , где
, где

На фиг.4 приведен обобщенный алгоритм определения координат ИРИ в соответствии с заявляемым способом. Дальнейшее повышение точности местоопределения ИРИ достигается статистической обработкой серии измеренных параметров {θi, βi}.
Выполнены экспериментальные исследования предлагаемого способа определения координат ИРИ на ЛПС (ИЛ-18). В ходе испытаний полет проходил на высоте 7 км по круговой орбите со смещенным центром относительно движущегося ИРИ. Расстояние до ИРИ по поверхности земли составляло от 15 до 26 км. На фиг.5 приведена экспериментально полученная зависимость вероятности промаха Рпр в местоопределении, значение которого П не хуже указанной величины в метрах. Промах в размере 300 метров составил в 35% измерений. При наличии возможности усреднения набора результатов измерений (ИРИ притормозил на перекрестке или временно остановился) точность местоопределения составила 100 метров.
Наиболее важной и сложной операцией в заявляемом способе является определение пространственной ориентации ЛПС по сигналам КА ГНСС. В настоящее время разработаны и серийно выпускаются устройства ориентации ЛПС 3D, обеспечивающие измерение текущих координат ЛПС, вектора путевой скорости  , тангажа llps и его крена klps. К их числу можно отнести изделия "Грот", "Шкипер-КН", КомпаНав НАВИС СН-3002 и др. (см. В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. / Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1993, стр.261-275; http://www.teknol.ru/products/aviation/companav2). Однако им присуща ограниченная область применения ввиду неполноты измеряемых параметров, необходимых для использования в различного рода измерительных системах. К числу таких параметров, прежде всего, относится курсовой угол αlps (угол сноса или склонения ζlps).
, тангажа llps и его крена klps. К их числу можно отнести изделия "Грот", "Шкипер-КН", КомпаНав НАВИС СН-3002 и др. (см. В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. / Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1993, стр.261-275; http://www.teknol.ru/products/aviation/companav2). Однако им присуща ограниченная область применения ввиду неполноты измеряемых параметров, необходимых для использования в различного рода измерительных системах. К числу таких параметров, прежде всего, относится курсовой угол αlps (угол сноса или склонения ζlps).
Оценку курсового угла αlps (склонения ζlps) ЛПС реализуют следующим образом. Осуществляют прием сигналов КА ГНСС, находящихся в зоне радиовидимости в полосе частот 1570-1625 МГц. Для решения навигационной задачи необходимо принять сигналы как минимум четырех КА. Исходя из этого должен быть обеспечен многоканальный (от 4 до 12 каналов и более) прием сигналов. Во всех каналах приема выполняют преобразование высокочастотных сигналов в электрические сигналы промежуточной частоты, дискретизацию их и квантование. Значение промежуточной частоты определяется характеристиками аналого-цифрового преобразователя, при этом имеет место тенденция постоянного повышения ее значения. Интервал дискретизации выбирают в соответствии с теоремой отсчетов (см. Введение в цифровую фильтрацию. Под. ред. Р.Богнера и А.Константидиса. - М.: Мир, 1976, стр.26-27).
Большинство алгоритмов обработки сигналов рассчитаны на работу с комплексными сигналами. Для перехода от действительных к комплексным сигналам применяют квадратурные преобразования сигналов. В свете этого из цифровых сигналов всех n каналов приема, где n=4, 5, …, N, формируют 2n последовательности отсчетов In и Qn (по две на каждый канал приема), сдвинутые относительно друг друга на 90 градусов. Последние являются основой для поиска сигналов КА по задержке, частоте и фазе и выделения навигационного сообщения.
В космических аппаратах ГНСС используют сигналы фазовой манипуляции, например BPSK, которые могут приниматься лишь когерентно (см. Григорьев В.А. Передача сообщений по зарубежным информационным сетям. - Л.: ВАС, 1989, стр.98-102). Когерентное детектирование заключается в сравнении фазоманипулированного сигнала с опорным напряжением Uоп(t), которое синхронно и синфазно с несущей и получается обычно путем обработки самого принимаемого сигнала. Поэтому для приема информационных сообщений с борта КА обеспечивают частотную автоподстройку (на промежуточном этапе при переходе из режима поиска по частоте к режиму непрерывного слежения по фазе), фазовую автоподстройку и слежение за задержкой сигнала (см. B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Сетевые спутниковые радионавигационные системы. /Под ред. B.C.Шебшаевича. - М.: Радио и связь, 1993, стр.193-198). Для выделения навигационного сообщения сглаживают шумы и снимают модуляцию бидвоичным кодом.
Оценивают навигационные параметры ЛПС  {Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) с использованием сигналов от всех спутников, находящихся в зоне видимости. Здесь Blpsi, Llpsi, Hlpsi - координаты местоположения ЛПС в момент времени t; VX, VY, VZ, -величины, описывающие вектор
{Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) с использованием сигналов от всех спутников, находящихся в зоне видимости. Здесь Blpsi, Llpsi, Hlpsi - координаты местоположения ЛПС в момент времени t; VX, VY, VZ, -величины, описывающие вектор  , характеризующий значение путевого угла µ и путевой скорости VЛПС. При этом оценки получают по методу наименьших квадратов. С этой целью используют данные о координатах КА на момент проведения вычислений. Последние определяют при обработке эфемеридной информации, которая доступна потребителю после дешифрации навигационных сообщений.
, характеризующий значение путевого угла µ и путевой скорости VЛПС. При этом оценки получают по методу наименьших квадратов. С этой целью используют данные о координатах КА на момент проведения вычислений. Последние определяют при обработке эфемеридной информации, которая доступна потребителю после дешифрации навигационных сообщений.
Для измерения курсового угла αlps ЛПС необходимо предварительно определить параметры ветра (U - скорость перемещения воздушных масс относительно поверхности земли и направления ветра δ). С этой целью формируют массив из I значений  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), i=10, 11, …, I. Емкость массива I определяется заданной точностью измерения U и δ (угла αlps) и зависит от геометрии маршрута полета летательного аппарата.
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), i=10, 11, …, I. Емкость массива I определяется заданной точностью измерения U и δ (угла αlps) и зависит от геометрии маршрута полета летательного аппарата.
В качестве оптимального выступает движение ЛПС с постоянной скоростью по кругу. Для упрощения процедуры вычислений целесообразно компактное через равные интервалы времени, например через 1 секунду,
измерение текущего значения вектора состояния (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti).
На следующем этапе определяют оценочные значения воздушных скоростей летательного аппарата  для соответствующих i-х значений вектора состояния (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) при варьировании параметрами ветра U и δ в соответствии с выражением
для соответствующих i-х значений вектора состояния (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti) при варьировании параметрами ветра U и δ в соответствии с выражением

где Vi - i-e значение путевой скорости, µi, - i-е значение путевого угла, Ul - l-е оценочное значение скорости ветра, l=1, 2, …, L, δk - k-e оценочное направление ветра, k=1, 2, …, К. Дискретность измерения параметров Ul и δk определяется заданной точностью измерения параметров ветра ΔU и Δδ, а следовательно, и курсового угла Δαlps.
О степени соответствия текущего значения параметров Ul и δk истинным свидетельствует значение функции  , где
, где  и
и  соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора
соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора  , j=1, 2, …, J; J=L·K. Результаты вычислений f (Ul, δk) сравнивают с пороговым значением fзад (U, δ), определяющим априорно заданную точность оценивания параметров U и δ. При невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения Ul+1, δk+1 и повторяют процедуру вычисления следующего массива воздушных скоростей
, j=1, 2, …, J; J=L·K. Результаты вычислений f (Ul, δk) сравнивают с пороговым значением fзад (U, δ), определяющим априорно заданную точность оценивания параметров U и δ. При невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения Ul+1, δk+1 и повторяют процедуру вычисления следующего массива воздушных скоростей  .
.
Следует отметить, что стратегия поиска min f (Uc, δd) (перебора значений Uc и δd) может быть различной и в рамках способа не рассматривается (см. Г.Корн, Т.Корн. Справочник по математике для научных работников и инженеров. Определения, теоремы, формулы. Изд. пятое. /Под ред. И.Г.Артамовича. - М.: Наука, 1984, стр.350-367).
Если имеет место нештатная ситуация, когда в результате перебора всех значений Ul и δk пороговые условия остались невыполненными, определяют минимальное из найденных значений f (Ul, δk). Далее для параметров ветра в интервале {Ul-1, Ul+1} и {δk-1, δk+1} уменьшают шаг его дискретного изменения, например ΔU/10 и Δδ/10 и в соответствии с (5) формируют новый массив оценочных значений воздушных скоростей  . При отсутствии положительного результата записывают новый массив векторов состояния ЛПС (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), i=10, 11, …, I, и вновь начинают процедуру нахождения αlps.
. При отсутствии положительного результата записывают новый массив векторов состояния ЛПС (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), i=10, 11, …, I, и вновь начинают процедуру нахождения αlps.
В случае выполнения на очередной итерации пороговых условий fзад(U,δ)>f(Uc,δd) за параметры ветра принимают значения Uc и δd.
Выбор значения f(Ul,δk) в качестве критерия определения истинных текущих значений параметров ветра основывается на постоянстве воздушной скорости В при различных путевых углах µ. В общем виде в качестве оценки разброса значений параметров в группе возможно использование среднеквадратичного отклонения (СКО). В предлагаемом способе эта оценка заменена на более простую - разницу максимального и минимального значений  . Использование такой оценки оправдано тем, что количество дискретных значений предполагаемых воздушных скоростей B(U,β} ограничено величиной J=K·L (см. выражение 5). Положительной стороной такой оценки является значительный выигрыш в сокращении временных затрат на принятие решения о параметрах ветра U и δ, а из результатов моделирования (см. фиг.7) следует, что обе оценки СКО и f(Ul,δk) являются состоятельными (кривые 2 и 1 соответственно).
. Использование такой оценки оправдано тем, что количество дискретных значений предполагаемых воздушных скоростей B(U,β} ограничено величиной J=K·L (см. выражение 5). Положительной стороной такой оценки является значительный выигрыш в сокращении временных затрат на принятие решения о параметрах ветра U и δ, а из результатов моделирования (см. фиг.7) следует, что обе оценки СКО и f(Ul,δk) являются состоятельными (кривые 2 и 1 соответственно).
Далее в предлагаемом способе на основе навигационного треугольника скоростей (см. фиг.2) рассчитывают значение воздушной скорости B(Uc,δd) на основе теоремы косинусов

В свою очередь значение курсового угла αlps летательного аппарата определяют из выражения:

Найденные параметры ветра Uc, и δd используют в очередном цикле измерений курсового угла αlps в качестве средних значений  и
и  ограниченных выборок {U} и {δ} оценочных параметров ветра. В свою очередь склонение ζlps определяется из выражения
ограниченных выборок {U} и {δ} оценочных параметров ветра. В свою очередь склонение ζlps определяется из выражения

Таким образом, в предлагаемом способе определения координат ИРИ учитывается ориентация АС измерителя относительно борта ЛПС и ориентация ЛПС в пространстве, чем и достигается положительный эффект: повышение точности определения местоположения ИРИ.
Устройство определения координат ИРИ (см. фиг.8) содержит антенную решетку 5, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенного коммутатора 6, N входов которого подключены к соответствующим N выходам антенной решетки 5, а сигнальный и опорный выходы коммутатора 6 подключены соответственно к сигнальному и опорному входам двухканального приемника 7, выполненного по схеме с общими гетеродинами, аналого-цифрового преобразователя 8, выполненного двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника 7 соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя 8, блок преобразования Фурье 9, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя 8, первое 11 и второе 2 запоминающие устройства, блок вычитания 12, блок формирования эталонных значений ППИП 3, блока вычисления ППИП 10, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье 9, а второй информационный вход - с опорным выходом блока преобразования Фурье 9, группа информационных выходов блока вычисления ППИП 10 соединена с группой информационных входов первого запоминающего устройства 11, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания 12, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства 2, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП 3, группа информационных входов которого является первой входной установочной шиной 4 устройства определения координат ИРИ, последовательно соединенные умножитель 13, сумматор 14, третье запоминающее устройство 15, блок определения азимута и угла места 16, причем первая и вторая группа информационных входов умножителя 13 объединены поразрядно и соединены с группой информационных выходов блока вычитания 12, генератор синхроимпульсов 1, выход которого соединен с управляющим входом антенного коммутатора 6, входами синхронизации аналого-цифрового преобразователя 8, блока преобразования Фурье 9, первого 11, второго 2 и третьего 15 запоминающих устройств, блока вычитания 12, умножителя 13, сумматора 14, блока определения азимута и угла места 16, блока формирования эталонных значений ППИП 3 и блока вычисления ППИП 10.
Для обеспечения учета ориентации антенной решетки 5 относительно борта ЛПС и собственно ориентации ЛПС в пространстве дополнительно введены первый вычислитель 17, предназначенный для определения предварительных координат ИРИ  , второй вычислитель 18, предназначенный для определения скорректированных координат ИРИ
, второй вычислитель 18, предназначенный для определения скорректированных координат ИРИ  , третий вычислитель 19, предназначенный для определения истинных геоцентрических координат ИРИ
, третий вычислитель 19, предназначенный для определения истинных геоцентрических координат ИРИ  , четвертый вычислитель 20, предназначенный для преобразования истинных геоцентрических координат ИРИ
, четвертый вычислитель 20, предназначенный для преобразования истинных геоцентрических координат ИРИ  в географические координаты
в географические координаты  , четвертое запоминающее устройство 23, радионавигатор 24, устройство угловой ориентации ЛПС 25, предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi ЛПС. Причем первый 17, второй 18, третий 19 и четвертый 20 вычислители подключены последовательно. Группа информационных выходов четвертого вычислителя 20 является выходной шиной 21 устройства определения координат ИРИ. Первая и вторая группы информационных входов первого вычислителя 17 соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места 16. Третья группа информационных входов первого вычислителя 17 соединена со второй группой информационных выходов радионавигатора 24. Первая группа информационных выходов блока 24 соединена с второй группой информационных входов третьего вычислителя 19 и группой информационных входов устройства угловой ориентации ЛПС 25. Вторая, третья и четвертые группы информационных входов блока 25 являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ. Группа информационных выходов блока 25 соединена с третьей группой информационных входов третьего вычислителя 19. Группа информационных выходов четвертого запоминающего устройства 23 соединена со второй группой информационных входов второго вычислителя 18, а группа информационных входов является второй входной установочной шиной 22 устройства определения координат ИРИ. Входы синхронизации первого 17, второго 18, третьего 19 и четвертого 20 вычислителей объединены и соединены с входами синхронизации четвертого запоминающего устройства 23, устройства угловой ориентации ЛПС 25 и выходом генератора синхроимпульсов 1.
, четвертое запоминающее устройство 23, радионавигатор 24, устройство угловой ориентации ЛПС 25, предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi ЛПС. Причем первый 17, второй 18, третий 19 и четвертый 20 вычислители подключены последовательно. Группа информационных выходов четвертого вычислителя 20 является выходной шиной 21 устройства определения координат ИРИ. Первая и вторая группы информационных входов первого вычислителя 17 соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места 16. Третья группа информационных входов первого вычислителя 17 соединена со второй группой информационных выходов радионавигатора 24. Первая группа информационных выходов блока 24 соединена с второй группой информационных входов третьего вычислителя 19 и группой информационных входов устройства угловой ориентации ЛПС 25. Вторая, третья и четвертые группы информационных входов блока 25 являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ. Группа информационных выходов блока 25 соединена с третьей группой информационных входов третьего вычислителя 19. Группа информационных выходов четвертого запоминающего устройства 23 соединена со второй группой информационных входов второго вычислителя 18, а группа информационных входов является второй входной установочной шиной 22 устройства определения координат ИРИ. Входы синхронизации первого 17, второго 18, третьего 19 и четвертого 20 вычислителей объединены и соединены с входами синхронизации четвертого запоминающего устройства 23, устройства угловой ориентации ЛПС 25 и выходом генератора синхроимпульсов 1.
Устройство определения координат ИРИ (см. фиг.8) работает следующим образом. Заявляемое устройство представляет из себя фазовый интерферометр (блоки 1-16), дополненный элементами навигации (блоки 24, 25) и вычислительными модулями (блоки 17-23).
Работа фазового интерферометра аналогична устройству-прототипу (см. пат. РФ №2263327, G01S 3/14, опубл. 27.10.2005 г., бюл. №30). На подготовительном этапе выполняют следующие операции. Измеряют взаимные расстояния между антенными элементами Al,h решетки 5 при их размещении на плоскости. Результаты измерений по шине 4 (см. фиг.8) поступают на вход блока формирования эталонных значений ППИП 3. Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых Δf определяются минимальной шириной пропускания приемных трактов 7. Поддиапазоны, количество которых V=ΔF/Δf, нумеруют v=1, 2, …, V. Рассчитывают средние частоты всех поддиапазонов по формуле fv=Δf(2v-1)/2. Рассчитывают эталонные значения ППИП (блок 3) для средних частот всех поддиапазонов fv. В качестве ППИП используют значения разностей фаз сигналов Δφl,k(fv) для всех возможных парных комбинаций антенных элементов в рамках антенной решетки 5.
Выбор Δφl,h(fv) в качестве ППИП основан на следующем. Одним из наиболее перспективных направлений развития измерителей пространственных параметров является использование интерферометрических пеленгаторов (см. Клименко Н.Н. Современное состояние теории и практики радиоинтерферометрии // Зарубежная радиоэлектроника, №1, 1990, с.3-14). Интерферометры существуют двух типов: фазовые и корреляционные. В материалах пат.US №4728959 "Радиопеленгационная система", МПК G01S 5/04, опубл. 8.08.1986 г. отмечается, что в сильно пересеченной местности и городских условиях в меньшей степени подлежат искажению фазовые параметры сигнала. Кроме того, в книге Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p. отмечается, что: "потенциальные возможности оценки угла прихода сигнала путем сравнения фазы выше, чем у корреляционного интерферометра, если оцениваемый сигнал узкополосен и имеет малую нестабильность несущей частоты".
В процессе расчета эталонных ППИП в блоке 3 моделируют размещение эталонного источника поочередно вокруг АС измерителя с дискретностью Δθ и Δβ на удалении нескольких длин волн. В блоке 3 по известному алгоритму (см. пат. РФ №2283505, G01S 13/46, опубл. 24.05.2004 г., бюл. №30) вычисляют значение разностей фаз Δφl,h,эm (fv), которые в дальнейшем хранятся во втором запоминающем устройстве 2 (см. фиг.8).
В процессе работы устройства с помощью блоков 5-16 осуществляют поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. Принимаемые решеткой 5 сигналы на частоте fv поступают на соответствующие входы антенного коммутатора 6. В задачу последнего входит обеспечение синхронного подключения в едином промежутке времени любых пар антенных элементов к опорному и сигнальному выходам. В результате последовательно во времени на оба сигнальных входа двухканального приемника 7 поступают сигналы со всех возможных пар антенных элементов (АЭ) решетки 5. При этом все антенные элементы периодически выступают как в качестве сигнальных, так и в качестве опорных (при условии использования полнодоступного коммутатора 6). Этим достигается максимальный набор статистики о пространственных параметрах электромагнитного поля.
Сигналы, поступившие на входы приемника 7, усиливают, фильтруют и переносят на промежуточную частоту, например 10,7 МГц. С опорного и сигнального выходов промежуточной частоты блока 7 сигналы поступают на соответствующие входы аналого-цифрового преобразователя (АЦП) 8, где синхронно преобразуют в цифровую форму. Полученные цифровые отсчеты сигналов антенных элементов Al и Ah в блоке 8 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые друг относительно друга на π/2. В результате в блоке 8 формируют четыре последовательности отсчетов (квадратурные составляющие отсчетов от двух АЭ Al и Ah). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 8 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в пат. РФ №2263328 и пат. РФ №2283505.
На завершающем этапе в блоке 8 формируют две комплексные последовательности отсчетов путем попарного объединения соответствующих отсчетов скорректированных последовательностей, которые поступают на входы блока преобразования Фурье 9.
В результате выполнения в блоке 9 операции в соответствии с выражением  получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в АЭ Al и Ah, а следовательно, и их фазовые характеристики. Однако этого не достаточно для измерения Δφl,h(fv) в парах АЭ Al и Ah. Последнее предполагает вычисление функции взаимной корреляции сигналов в соответствии с выражением
получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в АЭ Al и Ah, а следовательно, и их фазовые характеристики. Однако этого не достаточно для измерения Δφl,h(fv) в парах АЭ Al и Ah. Последнее предполагает вычисление функции взаимной корреляции сигналов в соответствии с выражением

где l, h=1, 2, …, N, l≠h - номер АЭ. На его основе определяют Δφl,h (fv) как

Эти функции выполняются блоком вычисления ППИП 10. В предлагаемом устройстве измеренное значение Δφl,h (fv) очередным импульсом генератора 1 записывают в первое запоминающее устройство 11. Данная операция повторяется до тех пор, пока не будут записаны в блок 11 значения ППИП для всех возможных сочетаний пар АЭ. Выполнение этой операции соответствует формированию массива измеренных ППИП Δφl,h,изм (fv).
Основное назначение блоков 12, 13, 14, 15, 16 и 2, 3 состоит в том, чтобы оценить степень отличия измеренных параметров Δφl,h,изм (fv) от эталонных значений Δφl,h,эт (fv), рассчитанных для всех направлений прихода сигнала Δθk и Δβc и всех fv

По аналогии с прототипом данная операция осуществляется следующим образом. Эталонные значения Δφl,h,эт (fv), хранящиеся в запоминающем устройстве 2, поступают на вход уменьшаемого блока вычитания 12 (см. фиг.8). На вход вычитаемого блока 12 поступают измеренные значения Δφl,h,изм (fv) с выхода блока 11. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар АЭ.
На следующем этапе полученные разности возводят в квадрат в блоке 13. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значение. В противном случае могла возникнуть бы ситуация, когда сумма положительных и отрицательных разностей компенсировали друг друга. Для возведения в квадрат каждый результат вычислений умножают на себя в блоке 19. Полученные квадраты разностей складывают в сумматоре 14 и записываются в третье запоминающее устройство 15. В результате в блоке 15 формируют массив данных Hθ,β (fv), на основе которого получают пространственные параметры θi и βi. в системе координат АС. Эта операция осуществляется блоком 16 путем поиска минимальной суммы min Hθ,β (fv) в массиве данных Hθ,β (fv). Очередным импульсом синхронизации генератора 1 значения θi и βi из блока 16 по соответствующим выходам поступают на первую и вторую группы информационных входов первого вычислителя 17. После этого содержимое первого 11 и третьего 15 запоминающих устройств обнуляют и начинают новый цикл измерения пространственных параметров θi+1 и βi+1.
В функции первого вычислителя входит предварительное определение удаления ИРИ от ЛПС di и координат ИРИ  в левосторонней системе декартовых координат антенной системы измерителя (1). Для реализации этих функций на первую группу информационных входов блока 17 поступает значение θi, на вторую группу информационных входов - βi, а на третью группу информационных входов - значение высоты ЛПС Hlps со второй группы информационных выходов радионавигатора 24.
в левосторонней системе декартовых координат антенной системы измерителя (1). Для реализации этих функций на первую группу информационных входов блока 17 поступает значение θi, на вторую группу информационных входов - βi, а на третью группу информационных входов - значение высоты ЛПС Hlps со второй группы информационных выходов радионавигатора 24.
Результаты предварительного определения координат ИРИ с группы информационных выходов блока 17 поступают на первую группу информационных входов второго вычислителя 18. В функции этого блока входит уточнение предварительных координат  на основе априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Последняя поступает по второй входной установочной шине 22 на информационные входы четвертого запоминающего устройства 23, представляющего собой буферное запоминающее устройство. С информационных выходов блока 23 значения {kant, lant, ζant} поступают на вторую группу информационных входов второго вычислителя 18. Вектор уточненных координат
на основе априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Последняя поступает по второй входной установочной шине 22 на информационные входы четвертого запоминающего устройства 23, представляющего собой буферное запоминающее устройство. С информационных выходов блока 23 значения {kant, lant, ζant} поступают на вторую группу информационных входов второго вычислителя 18. Вектор уточненных координат  определяют путем последовательного умножения
определяют путем последовательного умножения  на три соответствующие углам Эйлера матрицы поворота в соответствии с (2).
на три соответствующие углам Эйлера матрицы поворота в соответствии с (2).
Значение уточненных координат  с выходов блока 18 поступает на первую группу информационных входов третьего вычислителя 19. В функции этого блока входит определение истинных геоцентрических координат местоположения ИРИ
с выходов блока 18 поступает на первую группу информационных входов третьего вычислителя 19. В функции этого блока входит определение истинных геоцентрических координат местоположения ИРИ  c учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi и склонения ζlpsi; широты Blpsi, долготы Llpsi и высоты Hlpsi, его местоположения. С этой целью на вторую группу информационных входов с первой группы выходов радионавигатора 24 поступают данные о пространственном местоположении ЛПС {Blps, Llps, Hlps}i, а на третью группу информационных входов блока 19 с информационных выходов блока угловой ориентации ЛПС 25 подаются значения углов {klps, llps, ζlps}i, характеризирующие ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ИРИ {θ, β}i. Определение истинных геоцентрических координат
c учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi и склонения ζlpsi; широты Blpsi, долготы Llpsi и высоты Hlpsi, его местоположения. С этой целью на вторую группу информационных входов с первой группы выходов радионавигатора 24 поступают данные о пространственном местоположении ЛПС {Blps, Llps, Hlps}i, а на третью группу информационных входов блока 19 с информационных выходов блока угловой ориентации ЛПС 25 подаются значения углов {klps, llps, ζlps}i, характеризирующие ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ИРИ {θ, β}i. Определение истинных геоцентрических координат  в блоке 19 выполняют в соответствии с выражением (3). Следует отметить, что информация о пространственном положении ЛПС {Blps, Llps, Hlps}i используется блоком 25 для нахождения угловой ориентации ЛПС {klps, llps, ζlps}i. По этой причине она поступает, с первой группы информационных выходов блока 24 на информационные входы блока 25.
в блоке 19 выполняют в соответствии с выражением (3). Следует отметить, что информация о пространственном положении ЛПС {Blps, Llps, Hlps}i используется блоком 25 для нахождения угловой ориентации ЛПС {klps, llps, ζlps}i. По этой причине она поступает, с первой группы информационных выходов блока 24 на информационные входы блока 25.
В связи с тем, что использование геоцентрических координат на практике затруднено, четвертым вычислителем 20 осуществляют преобразование истинных геоцентрических координат ИРИ  в географические
в географические  в соответствии с выражением (4). На выходной шине устройства определения местоположения ИРИ 21 формируют значение географических координат i-го ИРИ. Синхронизацию работы блоков 17-20, 23 и 25 осуществляют импульсами генератора 1.
в соответствии с выражением (4). На выходной шине устройства определения местоположения ИРИ 21 формируют значение географических координат i-го ИРИ. Синхронизацию работы блоков 17-20, 23 и 25 осуществляют импульсами генератора 1.
В устройстве, реализующем предложенный способ, используют известные элементы и блоки, описанные в научно-технической литературе. Блоки с 1 по 16 реализуют аналогично соответствующим блокам устройства-прототипа.
Варианты реализации антенных элементов и антенной решетки 5 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь. 1997; Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 р.). Тип используемых АЭ определяется местом размещения антенной решетки 5. Под фюзеляжем АС, как правило, используются ненаправленные АЭ. При размещении антенной решетки 5 в других местах используют направленные АЭ. В качестве последних могут быть использованы широкополосные трехдиапазонные рупорно-микрополосковые антенны (см. пат. РФ №2360338, пат. РФ №2345453). Антенные коммутаторы 6 широко известны (см. Вениаминов В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.; Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987. - 120 с.), двухканальный приемник 7 может быть реализован с помощью двух профессиональных приемников типа IC-RS500 фирмы ICOM (см. Communication Receiver IC-RS500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используют одновременно в качестве первого и второго гетеродинов соответственно второго приемника. Кроме того, в качестве приемника 7 могут попарно использоваться и другие приемники фирмы ICOM: IC-R7000, IC-PCR1000.
Двухканальный АЦП 8 и блок преобразования Фурье 9, а также блок вычисления ППИП 10, первое запоминающее устройство 11 могут быть реализованы с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP-21062 (см. руководство пользователя e-mail: insys@arc.ru www-сервер www.insys.ru).
Построение генератора синхроимпульсов 1 известно и широко освещено в литературе (см. Радиоприемные устройства: учебное пособие для радиотехн. Спец. ВУЗов / Ю.Т.Давыдов и др.; М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсатор помех: Часть II. В.В.Никитченко. - Л.: ВАС. - 1990. - 176 с.),
С помощью блоков 12, 13 и 14 реализуют выражение (11) описания. Варианты выполнения сумматора 14, блока вычитания 12 приведены, например, в (Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Второе 2 и третье 15 запоминающие устройства реализуют по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник./ А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.).
Умножитель 13 реализует операцию возведение в квадрат (выражение 11), а его выполнение освещено в (Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.)
Блок формирования эталонных ППИП предназначен для создания таблиц эталонных значений разностей фаз Δφl,h,эт(fv) для различных пар АЭ решетки 5 и различных поддиапазонов v. На подготовительном этапе по входной установочной шине 4 задают следующие исходные данные:
сектор обработки по азимуту (θmin, θmax) и углу места (βmin, βmax);
точность нахождения углового параметров Δθ и Δβ;
удаление эталонного источника D;
топология размещения АЭ {rn}, где rn={Xn, Yn, Zn};
Задача блока 3 состоит в том, чтобы для данного подвижного пеленгатора, каждого частотного поддиапазона ΔF для заданной топологии антенной решетки 5 с дискретностью по азимуту Δθ и углу места Δβ рассчитать идеальные (эталонные) значения разностей фаз для Δφl,h,эт(fv) для всех пар антенных элементов с учетом того, что эталонный источник перемещается на удаление D от решетки. Блок 3 может быть реализован в виде автомата, микропроцессора (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.) и работающего в соответствии с алгоритмом, приведенным на фиг.9. В качестве последнего целесообразно использовать 16-разрядный микропроцессор К1810 ВМ86.
Реализация блока определения азимута и угла места 16 известна и широко освещена в литературе. Блок предназначен для поиска минимальной суммы Нθ,β (fv) и может быть реализован по пирамидальной схеме с использованием быстродействующих компьютеров (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Реализация четвертого запоминающего устройства 23 трудностей не вызывает. Блок 23 представляет собой буферное запоминающее устройство и может быть реализован аналогично блоку 2.
Радионавигатор 24 предназначен для измерения путевого угла µlps, широты Blps, долготы Llps и высоты Hlps нахождения ЛПС в момент времени ti (момент измерения параметров угловой ориентации ЛПС и местоположения ИРИ). Данная функция может быть реализована с помощью навигатора GPS (см. Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru).
Первый 17, второй 18, третий 19 и четвертый 20 вычислители предназначены для предварительного определения координат ИРИ (блок 17) и последующего уточнения этого значения благодаря учету ориентации АС измерителя относительно борта ЛПС и собственно угловой ориентации ЛПС в пространстве. Каждый из вычислителей выполняет строго определенные в выражениях 1-4 операции, реализация которых сложностей не вызывает. Для повышения быстродействия названные блоки могут быть реализованы на программируемых постоянных запоминающих устройствах, например серии К541 и К500. Для уменьшения массогабаритных характеристик, потребляемого тока блоки 17, 18, 19 и 20 целесообразно реализовать на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html), алгоритм работы которого приведен на фиг.4. Одновременно на микропроцессоре TMS320c6416 могут быть реализованы блоки 12-16.
Устройство угловой ориентации ЛПС 25 предназначено для измерения пространственных параметров ЛПС: крена klps, тангажа llps и склонения ζlps (см. фиг.10). Оно содержит блок измерения крена и тангажа 29, блок памяти 30, блок определения оценочных значений воздушных скоростей 31, генератор параметров ветра 32, блок оценки параметров ветра 33, блок определения воздушной скорости и курсового угла 34, сумматор 35, а также третью 26, четвертую 27 и пятую 28 входные установочные шины.
Работа блока измерения крена и тангажа 29, а также его реализация известны и широко освещены в литературе (см. пат. РФ 2103319, МПК G01S 5/00. Способ угловой ориентации объектов по сигналам космических аппаратов глобальных навигационных спутниковых систем, опубл. 20.02.98, бюл. №5; пат. РФ 2185637 G01S 5/00, 5/02. Способ угловой ориентации объекта по сигналам спутниковых радионавигационных систем (варианты), опубл. 20.07.2002 г., бюл. №20). Кроме того, значения klpsi и llpsi с меньшей точностью измеряются на борту любого ЛПС и могут быть использованы в устройстве 25 (что в свою очередь позволит исключить в ряде случаев блок 29). На выходе блока 29 формируются значения klpsi и llpsi, которые поступают на первую группу информационных входов сумматора 35. Работа остальной части устройства угловой ориентации ЛПС 25 (блоки 30-35) базируется на экспериментально полученных (на самолетах Ил-18 и СМ92) результатах измерений, которые свидетельствуют о том, что в течение 15-30 минут скорость ветра U и его направление δ на используемых высотах полета самолетов слабо меняется. Из этого следует вывод о том, что на интервале измерений в 10-30 секунд величины U и δ можно считать постоянными. С другой стороны, при выполнении измерений на борту ЛПС маршрут его полета, как правило, отличается от линейного.
С помощью данных радионавигатора 23 формируется набор векторов состояния  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), которые поступают на группу информационных входов блока памяти 30. Емкость массива I устанавливают по четвертой входной установочной шине 27, которая зависит от заданной точности измерения курсового угла αlps ЛПС (угла сноса ζlps) и степени нелинейности маршрута его полета. Результаты моделирования (см. фиг.11) и практические испытания показали, что I для различных условий должно составлять I≥10. Под действием импульсов блока 1 на первую и вторую группы информационных входов блока 31 последовательно поступают значения путевой скорости Vi и путевого угла µi, i=10, 11, …, I. На третью и четвертую группу информационных входов блока 31 последовательно поступают предполагаемые значения скорости и направления ветра Ul и δk с выходов блока 32. Следует отметить, что каждому i-му значению путевых параметров Vi и µi поочередно ставятся в соответствие возможные значения Ul и δk, l=10, 11, …, L, k=10, 11, …, К. В блоке 31 по поступающим значениям Vi, µi, Ul, δk осуществляют вычисление оценочных значений воздушных скоростей
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), которые поступают на группу информационных входов блока памяти 30. Емкость массива I устанавливают по четвертой входной установочной шине 27, которая зависит от заданной точности измерения курсового угла αlps ЛПС (угла сноса ζlps) и степени нелинейности маршрута его полета. Результаты моделирования (см. фиг.11) и практические испытания показали, что I для различных условий должно составлять I≥10. Под действием импульсов блока 1 на первую и вторую группы информационных входов блока 31 последовательно поступают значения путевой скорости Vi и путевого угла µi, i=10, 11, …, I. На третью и четвертую группу информационных входов блока 31 последовательно поступают предполагаемые значения скорости и направления ветра Ul и δk с выходов блока 32. Следует отметить, что каждому i-му значению путевых параметров Vi и µi поочередно ставятся в соответствие возможные значения Ul и δk, l=10, 11, …, L, k=10, 11, …, К. В блоке 31 по поступающим значениям Vi, µi, Ul, δk осуществляют вычисление оценочных значений воздушных скоростей  в соответствии с (5). Третья входная установочная шина 26 предназначена для ввода на начальном этапе в блоке 32 априорно известной информации (если такая имеется) о параметрах ветра {Umax, Umin}, {δmax, δmin}, что в конечном счете позволяет резко сократить временные затраты на нахождение Uc и δk в блоке 33.
в соответствии с (5). Третья входная установочная шина 26 предназначена для ввода на начальном этапе в блоке 32 априорно известной информации (если такая имеется) о параметрах ветра {Umax, Umin}, {δmax, δmin}, что в конечном счете позволяет резко сократить временные затраты на нахождение Uc и δk в блоке 33.
Блок оценки параметров ветра 33 предназначен для формирования L·K массивов оценочных значений воздушных скоростей  для всех значений Ul и δk, где l=10, 11, …,L, k=10, 11, …, К.. В случае дискретности параметров К в 1°К=360. Далее блоком 33 в каждом j-м массиве
для всех значений Ul и δk, где l=10, 11, …,L, k=10, 11, …, К.. В случае дискретности параметров К в 1°К=360. Далее блоком 33 в каждом j-м массиве  определяют максимальное и минимальное значения
определяют максимальное и минимальное значения  и
и  соответственно. Находят разность между названными величинами
соответственно. Находят разность между названными величинами  . Найденное значение сравнивают с пороговым уровнем fзад(U,δ), которое поступило в блок 33 по пятой установочной шине 28 устройства определения координат ИРИ. В блоке 33 осуществляют перебор и сравнение значений f(Ul,δk) с пороговым уровнем до момента выполнения условия fзад(U,δ)>f(Uc,δd). В этом случае на информационных выходах блока 33 формируются найденные с заданной точностью значения параметров Uc и δd, которые поступают на вторую группу информационных входов блока определения воздушной скорости и курсового угла 34 и информационные входы блока 32. Последнее позволит использовать их значения в качестве
. Найденное значение сравнивают с пороговым уровнем fзад(U,δ), которое поступило в блок 33 по пятой установочной шине 28 устройства определения координат ИРИ. В блоке 33 осуществляют перебор и сравнение значений f(Ul,δk) с пороговым уровнем до момента выполнения условия fзад(U,δ)>f(Uc,δd). В этом случае на информационных выходах блока 33 формируются найденные с заданной точностью значения параметров Uc и δd, которые поступают на вторую группу информационных входов блока определения воздушной скорости и курсового угла 34 и информационные входы блока 32. Последнее позволит использовать их значения в качестве  и
и  в ограниченных выборках {U} и {δ} оценочных параметров ветра, формируемых блоком 32.
в ограниченных выборках {U} и {δ} оценочных параметров ветра, формируемых блоком 32.
В функции блока 34 входит вычисление параметров αlps (ζlps) и B {Uc, δd) на основе полученных от блока 24 значений V и µlps (поступающих на первую группу информационных входов) в совокупности с данными Uc и δd блока 33, поступающими на вторую группу информационных входов. Вычисление αlps, ζlps и В (Uc, δd) осуществляют в соответствии с выражениями 6, 7 и 8. Синхронность выполнения названных операций обеспечивают импульсы генератора 1.
Результаты измерений ζlps (αlps) с выхода блока 34 поступают на вторую группу информационных входов сумматора 35. С выхода блока 35 (устройства 25) информация о значении угловой ориентации ЛПС {klps, llps, ζlps}i поступает на третью группу информационных входов блока 19.
Реализация блоков 30-35 известна. Блок памяти 30 обеспечивает хранение массива из I векторов состояния  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), может быть реализован на микросхемах памяти (см. Большие интегральные схемы запоминающих устройств: Справочник. / А.Ю.Гордонов, Н.В.Бекин, В.В.Циркин и др. /Под ред. А.Ю.Гордонова. - М.: Радиосвязь, 1990. - 288 с.).
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), может быть реализован на микросхемах памяти (см. Большие интегральные схемы запоминающих устройств: Справочник. / А.Ю.Гордонов, Н.В.Бекин, В.В.Циркин и др. /Под ред. А.Ю.Гордонова. - М.: Радиосвязь, 1990. - 288 с.).
Блок определения оценочных значений воздушных скоростей 31 предназначен для вычисления значений  в соответствии с выражением 5. На фиг.12 представлен вариант реализации блока 31. Он содержит первый и второй блоки вычисления sin-функции 36 и 37 соответственно; первый и второй блоки вычисления cos-функции 38 и 39 соответственно; первый, второй, третий и четвертый умножители 40, 41, 42 и 43 соответственно; первый и второй блоки вычитания 44 и 45 соответственно; первое и второе устройства возведения в квадрат 46 и 48 соответственно; сумматор 47; блок извлечения квадратного корня 49.
в соответствии с выражением 5. На фиг.12 представлен вариант реализации блока 31. Он содержит первый и второй блоки вычисления sin-функции 36 и 37 соответственно; первый и второй блоки вычисления cos-функции 38 и 39 соответственно; первый, второй, третий и четвертый умножители 40, 41, 42 и 43 соответственно; первый и второй блоки вычитания 44 и 45 соответственно; первое и второе устройства возведения в квадрат 46 и 48 соответственно; сумматор 47; блок извлечения квадратного корня 49.
С помощью названных блоков с соответствующими связями реализуется вычисление оценочных значений воздушных скоростей в соответствии с (5). Все элементы легко реализуются на элементах серии 1533. Синхронность выполнения названных операций обеспечивают импульсы блока 1.
Генератор параметров ветра 32 (см. фиг.10) предназначен для поочередного формирования всего спектра возможных значений Ul и δk. Может быть реализован на базе постоянного запоминающего устройства, например, микросхемах КМ1656 или 541 серии. Дискретность значений ΔUl и Δδk определяется заданной точностью измерения параметров ветра.
Блок оценки параметров ветра 33, в соответствии со своим функциональным предназначением, состоит из последовательно соединенных оперативного запоминающего устройства, обеспечивающего хранение L·K массивов размерности I оценочных значений воздушных скоростей, блока поиска максимального и минимального значений  и
и  соответственно, блока вычисления разности между названными величинами f (Ul, δk), блока сравнения f (Ul, δk) с пороговым уровнем fзад (U, δ). Реализация всех названных блоков известна в литературе и трудностей не вызывает (см. Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
соответственно, блока вычисления разности между названными величинами f (Ul, δk), блока сравнения f (Ul, δk) с пороговым уровнем fзад (U, δ). Реализация всех названных блоков известна в литературе и трудностей не вызывает (см. Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок определения воздушной скорости и курсового угла 34 может быть реализован в соответствии с фиг.13. Он содержит блок вычисления sin-функции 50, блок вычисления cos-функции 51, первое и второе устройство возведения в квадрат 53 и 52 соответственно, первый, второй, третий и четвертый умножители 54, 56, 57 и 60 соответственно, делитель 55, сумматор 58, блок вычисления arcsin-функции 59, первый и второй блоки вычитания 61 и 62 соответственно, устройство извлечения квадратного корня 63. С помощью названных блоков с соответствующими связями реализуют вычисление скорости ветра в соответствии с (6) склонения ζlps (8) и курсового угла (выражение 7). Реализация всех элементов блока 34 известна и широко освещена в литературе (см. Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Сумматор 35 предназначен для объединения информации об угловых параметрах ЛПС {klps, llps, ζlps}i, поступающей на соответствующие группы информационных входов с выходов блоков 29 и 34. Результаты измерений с выхода блока 35 (устройства 25) поступают на третью группу информационных входов блока 19.
Реализация блоков 30-35 на дискретных элементах приводит к существенным временным затратам (снижению быстродействия устройства 25), значительным габаритным размерам, большому весу и потреблению энергии. В связи с этим названные блоки совместно с блоками 12-16, 17-20 целесообразно реализовать на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html). Алгоритмы работы блоков 31, 33 и 34 приведены на фиг.14, 15 и 16.
Выполнено моделирование с целью определения точностных характеристик выполняемых измерений. На фиг.11 приведены зависимость точности измерения курсового угла  (
( ) от количества точек, в которых проводились вычисления (объема массива векторов состояния ЛПС). Приведенные результаты свидетельствуют о том, что при постоянном ветре (кривая 2) потенциальная точность измерения , в 1° в предлагаемом устройстве достигается при объеме массива векторов I=10. При непостоянном ветре
) от количества точек, в которых проводились вычисления (объема массива векторов состояния ЛПС). Приведенные результаты свидетельствуют о том, что при постоянном ветре (кривая 2) потенциальная точность измерения , в 1° в предлагаемом устройстве достигается при объеме массива векторов I=10. При непостоянном ветре
(Δµ=0,1 градуса2, ΔV=0,2 (м/с)2, ΔU=3 м2, Δδ=3 градуса2) точность измерения в 2° достигается при объеме массива векторов состояния I=30.
На фиг.7 приведены результаты моделирования состоятельности оценок истинности параметров ветра Uc и δk по кучности набора воздушных скоростей  , i=1, 2, …,I. Выполнено 1000 испытаний. Угол облета θ составил 10°. Скорость ветра принята равной истиной U=Uист, а направление ветра δ=δист+Δδ, где Δδ∈[-180…180] градусов. Кривая 1 на фиг.7 отражает оценку выбранного критерия
, i=1, 2, …,I. Выполнено 1000 испытаний. Угол облета θ составил 10°. Скорость ветра принята равной истиной U=Uист, а направление ветра δ=δист+Δδ, где Δδ∈[-180…180] градусов. Кривая 1 на фиг.7 отражает оценку выбранного критерия  , i=1, 2, …, I, а вторая кривая соответствует СКО. Из рассмотрения фиг.7 несложно сделать вывод о том, что выбранная в устройстве 25 оценка эффективности является состоятельной и несмещенной (см. Г. Корн, Т.Корн. Справочник по математике для научных работников и инженеров. Определения, теоремы, формулы. Издание пятое. - М.: Наука, 1984, стр.615-618).
, i=1, 2, …, I, а вторая кривая соответствует СКО. Из рассмотрения фиг.7 несложно сделать вывод о том, что выбранная в устройстве 25 оценка эффективности является состоятельной и несмещенной (см. Г. Корн, Т.Корн. Справочник по математике для научных работников и инженеров. Определения, теоремы, формулы. Издание пятое. - М.: Наука, 1984, стр.615-618).
Выполнена практическая апробация устройства 25, которая дала хорошие результаты (ошибка измерений для различных условий составила 1,5-3 градуса).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |





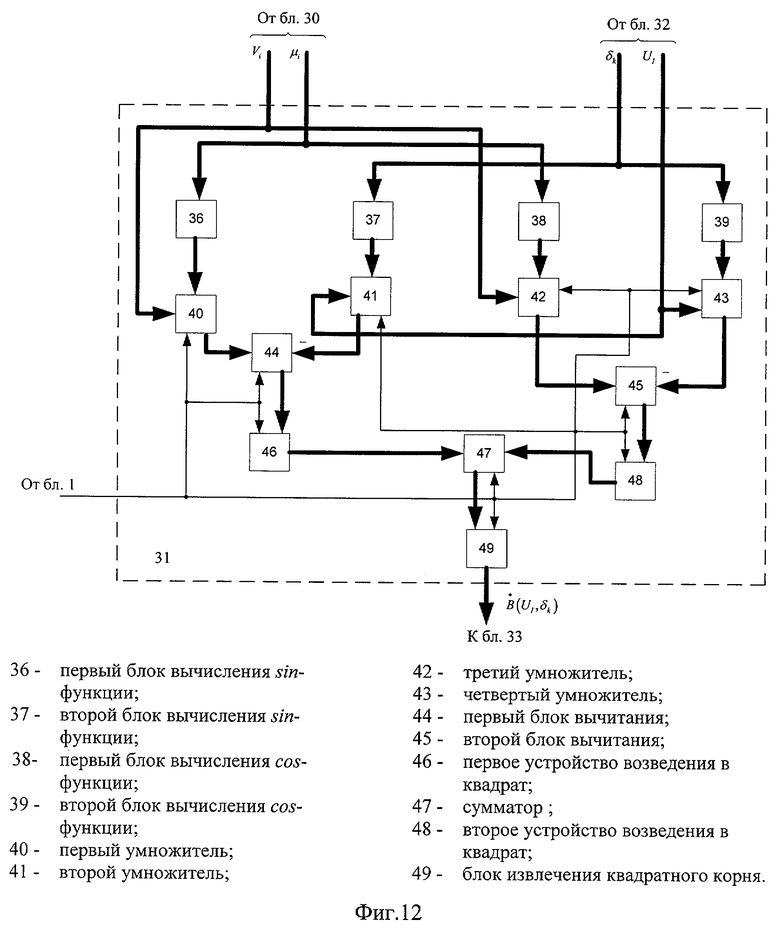
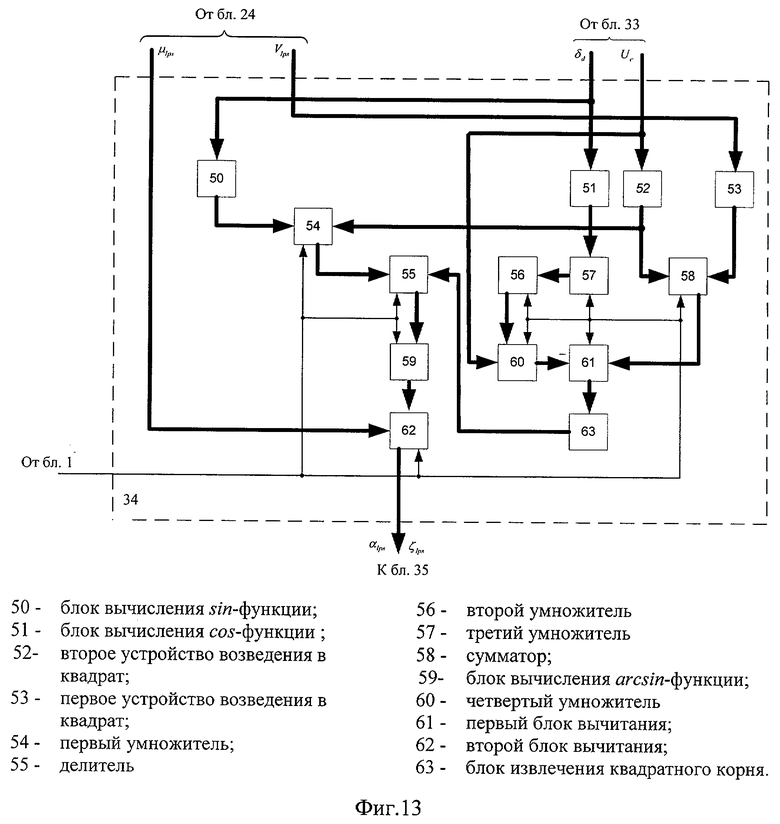

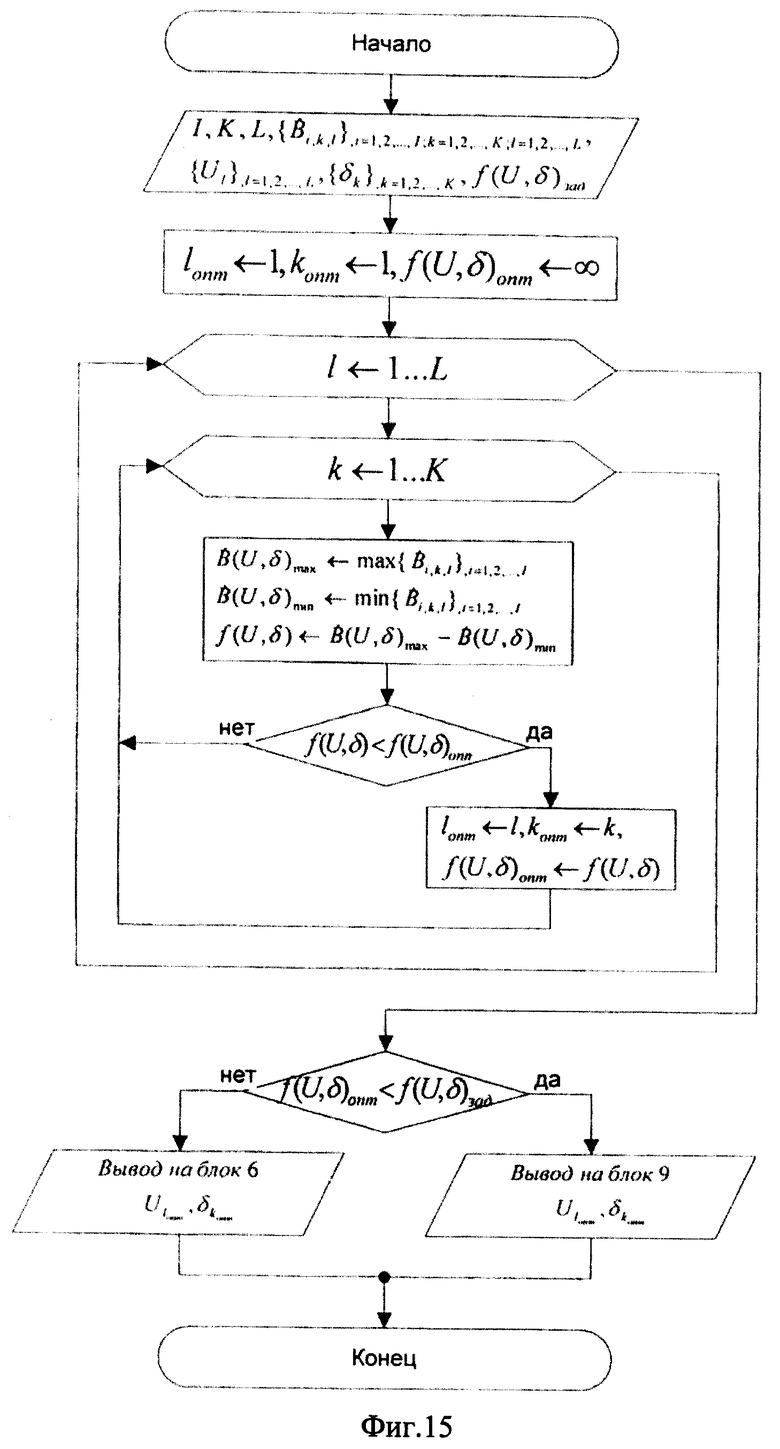

Изобретения относятся к радиотехнике и могут быть использованы для определения местоположения источников радиоизлучений (ИРИ) с летно-подъемного средства (ЛПС) угломерно-дальномерным способом. Достигаемым техническим результатом является повышение точности местоопределения ИРИ. Технический результат достигается тем, что на подготовительном этапе учитывается ориентация антенной решетки пеленгатора в трех плоскостях относительно борта ЛПС. В процессе работы одновременно с измерением пространственных параметров: азимута θi и угла места βi, на ИРИ оценивают местоположение ЛПС в пространстве и его ориентацию через угловые параметры: крен klpsi, тангаж llpsi и курсовой угол αlpsi (склонение ζlpsi). Положительный эффект достигается путем последовательного уточнения результатов измерений θi и βi с одновременным переходом от одной системы координат к другой. Устройство определения координат ИРИ, реализующее способ, содержит двухканальный фазовый интерферометр, первый, второй, третий и четвертый вычислители, запоминающее устройство, радионавигатор, пять входных установочных шин, выходную шину и устройство угловой ориентации ЛПС, определенным образом соединенные между собой. 2 н. и 1 з.п. ф-лы, 16 ил.
1. Способ определения координат источника радиоизлучения (ИРИ), заключающийся в том, что принимают сигналы ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором, установленным на летно-подъемном средстве (ЛПС), измеряют пространственно-информационные параметры обнаруженных сигналов: азимут θi и угол места βi в системе координат антенной системы с одновременным определением местоположения ЛПС {Blps,Llps,Hlps}i, где Blps, Llps и Hlps соответственно широта, долгота и высота ЛПС, предварительно определяют удаление di ИРИ от ЛПС и координаты ИРИ в момент времени ti  в левосторонней системе декартовых координат антенной системы пеленгатора, отличающийся тем, что корректируют координаты ИРИ
в левосторонней системе декартовых координат антенной системы пеленгатора, отличающийся тем, что корректируют координаты ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,lant,ζant} путем последовательного умножения значений координат
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,lant,ζant} путем последовательного умножения значений координат  на соответствующие углам Эйлера матрицы поворота, после чего вычисляют истинные геоцентрические координаты местоположения ИРИ
на соответствующие углам Эйлера матрицы поворота, после чего вычисляют истинные геоцентрические координаты местоположения ИРИ  учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi, курсового угла αlpsi и склонения ζlpsi, а также координат его местоположения: широты Blpsi, долготы Llpsi и высоты Hlpsi, а склонение ζlpsi определяют как разность между путевым µlpsi и курсовым αlpsi углами ЛПС, после чего преобразуют истинные геоцентрические координаты
учетом измеренных в момент времени ti пространственных углов ЛПС: крена klpsi, тангажа llpsi, курсового угла αlpsi и склонения ζlpsi, а также координат его местоположения: широты Blpsi, долготы Llpsi и высоты Hlpsi, а склонение ζlpsi определяют как разность между путевым µlpsi и курсовым αlpsi углами ЛПС, после чего преобразуют истинные геоцентрические координаты  местоположения ИРИ в географические координаты
местоположения ИРИ в географические координаты 
2. Способ по п.1, отличающийся тем, что для определения курсового угла летно-подъемного средства (ЛПС) принимают радиосигналы от космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС), преобразуют высокочастотные сигналы в электрические сигналы промежуточной частоты, дискретизируют их и квантуют, формируют из них две последовательности отсчетов путем разложения на квадратурные составляющие, сравнивают принятые сигналы Pc с заданным порогом Рпор, при выполнении условия Pc>Рпор принимают решение об обнаружении сигналов ГНСС, выполняют частотную и фазовую автоподстройки обнаруженных сигналов, а также автоподстройку по задержке сигналов, выделяют из обнаруженных сигналов навигационные сообщения КА ГНСС и осуществляют их демодуляцию, оценивают навигационные параметры и рассчитывают массив из I векторов состояния ЛПС  (Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), где VXi, VYi, VZi - величины, описывающие вектор
(Blpsi, Llpsi, Hlpsi, VXi, VYi, VZi, ti), где VXi, VYi, VZi - величины, описывающие вектор  и характеризующие значение путевого угла µi и путевой скорости Vi ЛПС, i=10, 11, …, I, а емкость массива I определяют заданной точностью измерения курсового угла αlps ЛПС в зависимости от геометрии маршрута его полета, оценивают значения воздушных скоростей ЛПС
и характеризующие значение путевого угла µi и путевой скорости Vi ЛПС, i=10, 11, …, I, а емкость массива I определяют заданной точностью измерения курсового угла αlps ЛПС в зависимости от геометрии маршрута его полета, оценивают значения воздушных скоростей ЛПС  ,
,  , …,
, …,  для соответствующих значений вектора состояния
для соответствующих значений вектора состояния  (Blpsi,Llpsi, Hlpsi, VXi, VYi, VZi, ti) в соответствии с выражением
(Blpsi,Llpsi, Hlpsi, VXi, VYi, VZi, ti) в соответствии с выражением

где Vi - i-e значение путевой скорости, µi - i-е значение путевого угла, Ul - l-е оценочное значение скорости ветра, l=1, 2, …, L, δk - k-e оценочное направление ветра, k=1, 2, …, К, оценивают качество принятого решения о параметрах ветра в соответствии с выражением  где
где  и
и  соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора
соответственно максимальное и минимальное оценочные значения воздушных скоростей из набора  для параметров ветра Ul и δk, результаты вычислений f(U1,δk) сравнивают с пороговым значением fзад(U,δ), определяющим априорно заданную точность оценивания параметров ветра U и δ, при невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения и повторяют процедуру вычисления набора оценочных значений воздушных скоростей, при выполнении на очередной итерации пороговых условий fзад(U,δ)>f(Uc,δd) за параметры ветра принимают соответствующие значения Uc и δd, на основе навигационного треугольника скоростей рассчитывают значения воздушной скорости В(Uc,δd), курсового угла αlps и склонения µlps в соответствии с выражениями:
для параметров ветра Ul и δk, результаты вычислений f(U1,δk) сравнивают с пороговым значением fзад(U,δ), определяющим априорно заданную точность оценивания параметров ветра U и δ, при невыполнении пороговых условий параметрам ветра U и δ присваивают очередные значения и повторяют процедуру вычисления набора оценочных значений воздушных скоростей, при выполнении на очередной итерации пороговых условий fзад(U,δ)>f(Uc,δd) за параметры ветра принимают соответствующие значения Uc и δd, на основе навигационного треугольника скоростей рассчитывают значения воздушной скорости В(Uc,δd), курсового угла αlps и склонения µlps в соответствии с выражениями:
 ,
,
 ,
,
 ,
,
а найденные параметры ветра Uc и δd используют в очередном цикле измерений смещения ζlps и курсового угла αlps в качестве средних значений  и
и  ограниченных выборок {U} и {δ} оценочных параметров ветра.
ограниченных выборок {U} и {δ} оценочных параметров ветра.
3. Устройство определения координат источника радиоизлучения (ИРИ), содержащее антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, отличающееся тем, что дополнительно введены первый вычислитель, предназначенный для определения предварительных координат ИРИ  второй вычислитель, предназначенный для определения скорректированных координат ИРИ
второй вычислитель, предназначенный для определения скорректированных координат ИРИ  третий вычислитель, предназначенный для определения истинных геоцентрических координат ИРИ
третий вычислитель, предназначенный для определения истинных геоцентрических координат ИРИ  четвертый вычислитель, предназначенный для преобразования истинных геоцентрических координат ИРИ
четвертый вычислитель, предназначенный для преобразования истинных геоцентрических координат ИРИ  в географические координаты
в географические координаты  четвертое запоминающее устройство, радионавигатор, устройство угловой ориентации летно-подъемных средств (ЛПС), предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi, ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, группа информационных выходов четвертого вычислителя является выходной шиной устройства определения координат ИРИ, а первая и вторая группы информационных входов первого вычислителя соединены соответстветно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя соединена со второй группой информационных выходов радионавигатора, первая группа информационных выходов которого соединена с второй группой информационных входов третьего вычислителя и первой группой информационных входов устройства угловой ориентации ЛПС, вторая, третья и четвертая группы информационных входов которого являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ, а группа информационных выходов устройства угловой ориентации ЛПС соединена с третьей группой информационных входов третьего вычислителя, группа информационных выходов четвертого запоминающего устройства соединена со второй группой информационных входов второго вычислителя, а группа информационных входов является второй входной установочной шиной устройства определения координат ИРИ, входы синхронизации первого, второго, третьего и четвертого вычислителей объединены и соединены со входами синхронизации четвертого запоминающего устройства, устройства угловой ориентации ЛПС и выходом генератора синхроимпульсов.
четвертое запоминающее устройство, радионавигатор, устройство угловой ориентации летно-подъемных средств (ЛПС), предназначенное для измерения углов крена klpsi, тангажа llpsi и склонения ζlpsi, ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, группа информационных выходов четвертого вычислителя является выходной шиной устройства определения координат ИРИ, а первая и вторая группы информационных входов первого вычислителя соединены соответстветно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя соединена со второй группой информационных выходов радионавигатора, первая группа информационных выходов которого соединена с второй группой информационных входов третьего вычислителя и первой группой информационных входов устройства угловой ориентации ЛПС, вторая, третья и четвертая группы информационных входов которого являются соответственно третьей, четвертой и пятой входными установочными шинами устройства определения координат ИРИ, а группа информационных выходов устройства угловой ориентации ЛПС соединена с третьей группой информационных входов третьего вычислителя, группа информационных выходов четвертого запоминающего устройства соединена со второй группой информационных входов второго вычислителя, а группа информационных входов является второй входной установочной шиной устройства определения координат ИРИ, входы синхронизации первого, второго, третьего и четвертого вычислителей объединены и соединены со входами синхронизации четвертого запоминающего устройства, устройства угловой ориентации ЛПС и выходом генератора синхроимпульсов.
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| US 5406291 A, 11.04.1995 | |||
| WO 2005045459 A2, 19.05.2005 | |||
| WO 03032004 A2, 17.04.2003 | |||
| Приспособление для обработки клубней картофеля защитно-стимулирующими жидкостями при посадке | 2018 |
|
RU2693258C1 |

