Изобретение относится к фотоследящим устройствам и может быть использовано в системах обнаружения, слежения и управления за воздушным движением.
Известны устройства для обнаружения и слежения (SU №140226, МКИ G02B 23/00, опубл. 30.08.1961; SU №305442, G02B 23/00, опубл. 04.06.1971; RU №2002278 C1, МКИ G01S 17/00, опубл. 30.10.1993), содержащие излучатель сигнала, приемник сигнала, фотоэлементы, блоки обработки сигнала, блоки управления положения устройства, межблочные соединительные кабели.
Недостатком известных устройств является невозможность высококачественной обработки отраженного от воздушного объекта сигнала, посланного излучателем, из-за метеорологических и электромагнитных помех.
Известно устройство содержащее первую и вторую регистрирующие системы, блок разверсток и синхронизации, блок памяти и видеоконтрольное устройство, коррелятор, блок анализа светового поля, регулируемая линия задержки, второй блок памяти, блок вычитания порогового устройства и блок стробирования (RU №2042154 C1, МКИ G01S 17/00, опубл. 20.08.1995).
Недостатком известной конструкции является то, что при непросвечивающей облачности, искажении отраженного сигнала геометрией воздушного объекта, изготовлении воздушного объекта из материалов, не отражающих или поглощающих спектр радиоволн видимого диапазона, невозможно принять отраженный от воздушного объекта сигнал на регистрирующие системы.
Изобретение решает задачу уменьшения времени поиска воздушного объекта в условиях метеорологических и электромагнитных помех.
Технический результат заключается в уменьшении времени поиска воздушного объекта за счет замены обработки информации спектра радиоволн видимого диапазона на спектр радиоволн ультрафиолетового диапазона, независимость определения объекта от помех.
Указанный технический результат достигается тем, что в устройстве для обнаружения объекта на удаленном фоне, включающем приемники сигналов, блок обработки сигналов, телевизионную систему, приемники сигналов, установленные на правом и левом карданных подвесах, содержат защищенные тубусами фотоэлементы, установленные в защитном корпусе с увиолевым стеклом, при этом датчики токов, установленные в электрической цепи фотоэлементов, связаны многоканальными кабелями с программно-логическими комплексами, которые кабелями связаны с системным блоком компьютера и телевизионной системой монитора компьютера, при этом правый и левый карданные подвесы приемников сигналов соединены интегрированными шаговыми сервоприводами с системным блоком компьютера.
Использование в конструкции устройства приемника оптического сигнала с большим количеством фотоэлементов с тубусами, работающих в ультрафиолетовом диапазоне, улавливающих только прямую ультрафиолетовую радиацию, позволяет отслеживать величину проходящей через любой воздушный объект ультрафиолетовой радиации, частично или полностью поглощая ее или отражая, при этом само устройство для обнаружения объекта остается незамеченным.
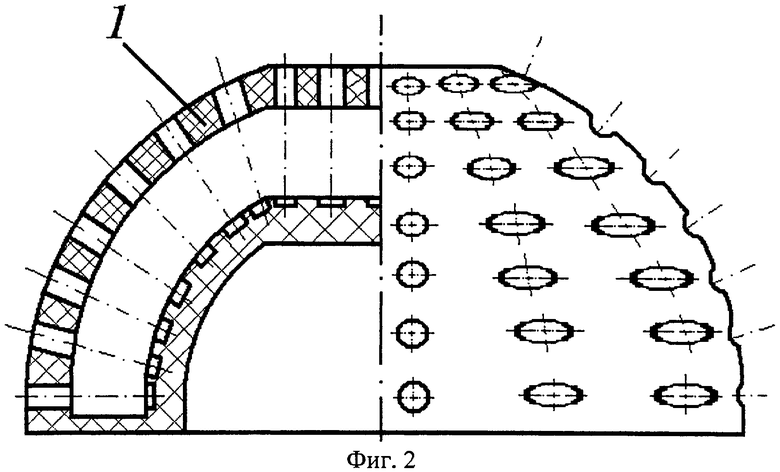
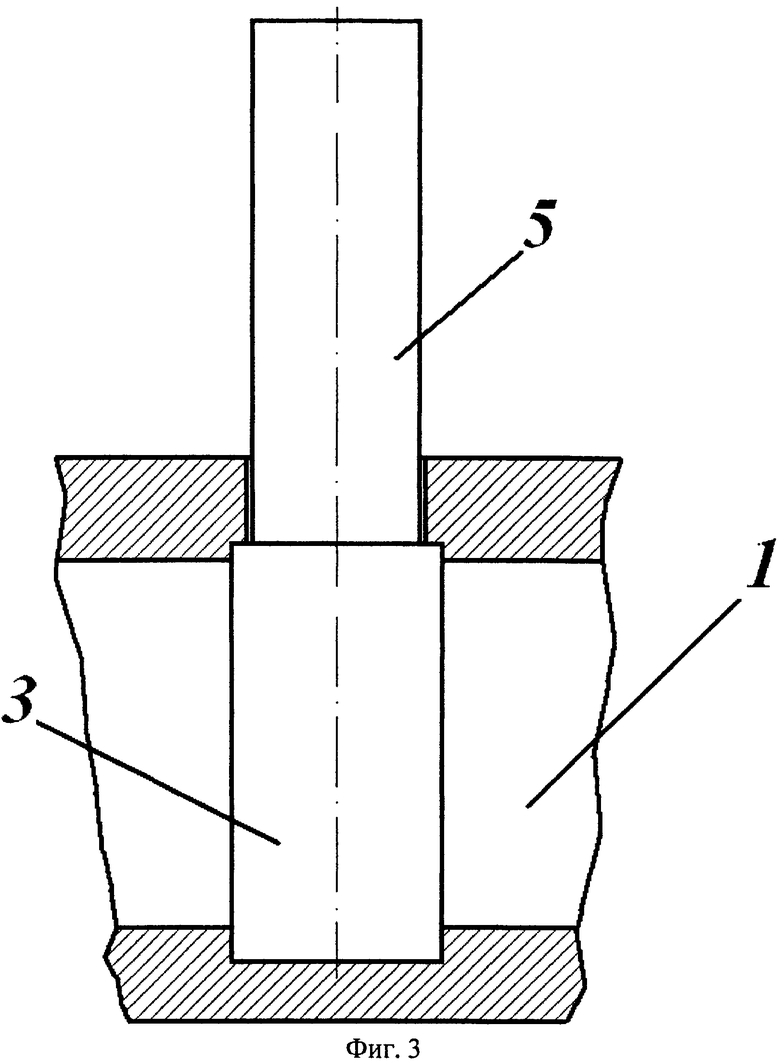
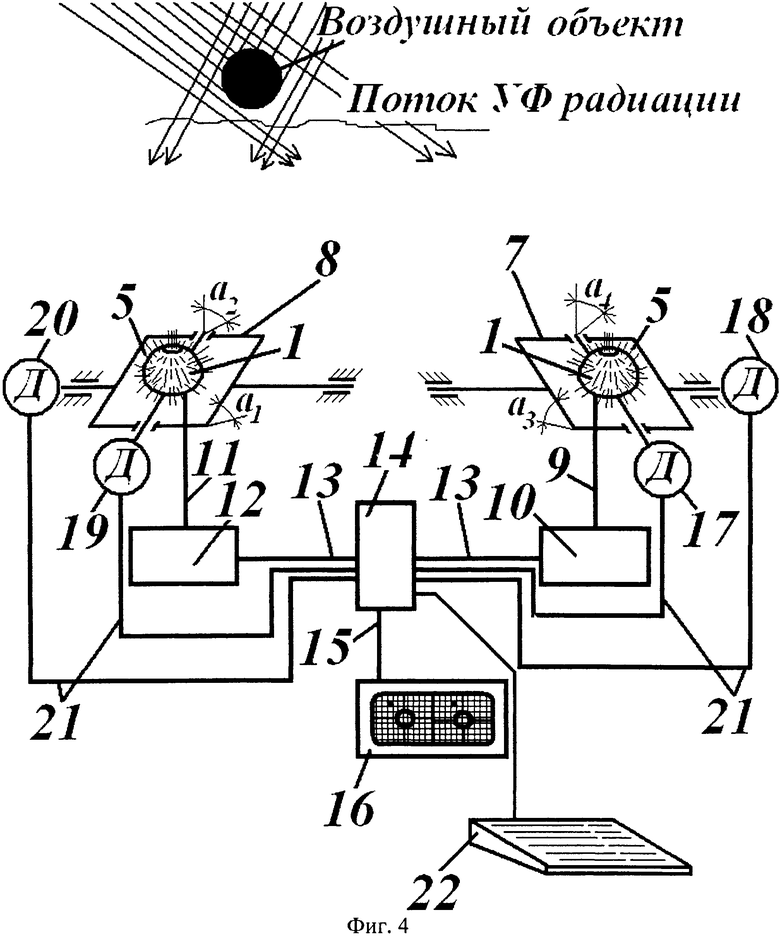
На фиг. 1 изображена электрическая схема фотоэлемента в защитном корпусе с тубусом, на фиг. 2 - корпус принимающего устройства, на фиг. 3 - защитный корпус фотоэлемента с тубусом в корпусе принимающего устройства, местный разрез, на фиг. 4 - функциональная схема устройства для обнаружения объекта на удаленном фоне, где - α1 и α3 углы наклона левого и правого карданных подвесов 8 и 7 относительно поверхности земли, α2 и α4 - углы наклона корпусов приемников 1, относительно плоскости карданных подвесов 8 и 7.
Устройство для обнаружения объекта на удаленном фоне состоит из двух принимающих устройств, состоящих из двух корпусов приемника 1 правого и левого, с закрепленными внутри них фотоэлементами 2 типа Ф-4 или Ф-29, работающими в ультрафиолетовом диапазоне. Фотоэлементы 2 установлены в защитном корпусе 3, закрытые увиолевым стеклом 4 для защиты от осадков. На увиолевое стекло 4 нанесен светофильтрующий слой типа БС16 или БС3, пропускающий диапазон волн λ=150-380 нм. Фотоэлементы 2 закрыты тубусами 5 для защиты от рассеянной ультрафиолетовой радиации (УФР). В электрической цепи каждого фотоэлемента 2 установлен датчик токов 6. Корпуса приемников 1 установлены на правом 7 и левом 8 карданном подвесе. Каждый датчик тока 6 фотоэлемента 2 корпуса приемника 1 правого карданного подвеса 7 связан многоканальным кабелем 9 с программно-логическим комплексом 10, а каждый датчик тока 6 фотоэлемента 2 корпуса приемника 1 левого карданного подвеса 8 связан многоканальным кабелем 11 с программно-логическим комплексом 12.
Программно-логические комплексы 10 и 12 связаны кабелями 13 с системным блоком компьютера 14. Системный блок компьютера 14 многоканальным кабелем 15 связан с монитором компьютера 16. Для управления положением правого карданного подвеса 7 используются интегрированные шаговые сервоприводы 17 и 18 типа СПШ10, а для управления положением левого карданного подвеса 8 используются интегрированные шаговые сервоприводы 19 и 20 типа СПШ10, снабженные системой встроенных датчиков. Интегрированные шаговые сервоприводы 18, 19 и 20, 21 соединены многоканальными кабелями 21 с системным блоком компьютера 14. Управление всем устройством для обнаружения объекта на удаленном фоне осуществляется от клавиатуры компьютера 22 оператором (на фиг. не показано). Экран монитора 16 разделен на правую и левую часть для приема сигналов с фотоэлементов правого и левого принимающих устройств.
Устройство для обнаружения объекта на удаленном фоне работает следующим образом. Воздушный объект, появившийся из-за горизонта, перекрывает попадание прямой ультрафиолетовой радиации на фотоэлементы 2, защищенные от рассеянной ультрафиолетовой радиации тубусом 5. В результате этого на фотоэлементе 2 прекращается фототок, что фиксирует датчик тока 6. Каждый датчик тока 6 фотоэлементов 2 правого карданного подвеса 7 посылает сигнал по многоканальному кабелю 9 к программно-логическому комплексу 10. От программно-логического комплекса 10 обработанные сигналы с датчиков тока 6 фотоэлементов 2 поступают по кабелю 13 в системный блок компьютера 14. От системного блока компьютера 14, обработанные сигналы датчиков тока 6 от фотоэлементов 2 по многоканальному кабелю 15 передаются на монитор компьютера 16. На экране монитора 16, разделенного на правую и левую части, отображаются все фотоэлементы 2 в светящимся режиме от правого карданного подвеса 7 и левого карданного подвеса 8, соответственно, кроме тех, которым перекрыт поток прямой ультрафиолетовой радиации воздушным объектом.
Оператор, управляя интегрированными шаговыми сервоприводами 17 и 18 правого карданного подвеса 7, при помощи клавиатуры компьютера 22 производит установку корпуса приемника 1 к воздушному объекту так, чтобы к усеченной вершине приемника 1 был перекрыт поток прямой ультрафиолетовой радиации воздушным объектом. Данное положение правого карданного подвеса 7 соответствует положению черной точки в центре правой части экрана монитора 16.
Каждый датчик тока 6 фотоэлементов 2 левого карданного подвеса 8 посылает сигнал по многоканальному кабелю 11 к программно-логическому комплексу 12. Далее, от программно-логического комплекса 12 обработанные сигналы датчиков тока 6 с фотоэлементов 2 поступают по кабелю 13 в системный блок компьютера 14. От системного блока компьютера 14 обработанные сигналы датчиков тока 6 от фотоэлементов 2 передаются по многоканальному кабелю 15 на монитор 16.
На левой части экрана монитора 16 отображены все фотоэлементы 2 левого карданного подвеса 8 в светящимся режиме, кроме тех, которым был перекрыт поток прямой ультрафиолетовой радиации воздушным объектом. Оператор, управляя интегрированными шаговыми сервоприводами 20 и 21 левого карданного подвеса 8, при помощи клавиатуры компьютера 22 производит установку корпуса приемника 1 к воздушному объекту так, чтобы к его усеченной вершине был перекрыт поток прямой ультрафиолетовой радиации воздушным объектом. Данное положение левого карданного подвеса 8 соответствует положению черной точки в центре левой части экрана монитора 16.
При больших углах наклона правого 7 и левого 8 карданных подвесов, часть фотоэлементов 2 будет наклонена к земной поверхности и на экране монитора 16 появится темный фон. В этом случае оператор отслеживает только точки на правой и левой части экрана монитора 16.
По углам наклона α1 и α3 левого и правого карданных подвесов 8 и 7 относительно поверхности Земли, и углов наклона α2 и α4 корпусов приемников 1, относительно плоскости карданных подвесов 8 и 7 и зная расстояние между карданными подвесами 7 и 8, оператор вычисляет расстояние до воздушного объекта и расстояние от воздушного объекта до поверхности Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения объекта на удалённом фоне | 2015 |
|
RU2643920C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СТРЕЛЫ ПРОВЕСА ВОЛОКОННО-ОПТИЧЕСКИХ КАБЕЛЕЙ (ВОК), ПОДВЕШЕННЫХ НА ОПОРАХ КОНТАКТНОЙ СЕТИ | 2007 |
|
RU2342261C1 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ВОСПРИИМЧИВОСТИ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ В СОСТАВЕ СОЛНЕЧНЫХ БАТАРЕЙ К ОПТИЧЕСКОМУ ИЗЛУЧЕНИЮ | 2013 |
|
RU2565331C2 |
| Многоканальный распределенный волоконно-оптический датчик для мониторинга и охраны протяженных объектов | 2022 |
|
RU2797773C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОСТА | 2015 |
|
RU2598803C1 |
| СПОСОБ ОЦЕНКИ ИЗБИРАТЕЛЬНОСТИ ВНИМАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277374C2 |
| СПОСОБ МНОГОКАНАЛЬНОГО ВИДЕОАУДИОНАБЛЮДЕНИЯ И РЕАЛИЗУЮЩАЯ ЕГО ИНТЕГРИРОВАННАЯ ВЫСОКОЧАСТОТНАЯ СИСТЕМА | 2003 |
|
RU2250504C1 |
Изобретение относится к фотоследящим устройствам и может быть использовано в системах обнаружения, слежения и управления за воздушным движением. Устройство включает приемники сигналов, которые установлены на правом и левом карданных подвесах и содержат защищенные тубусами фотоэлементы, установленные в защитном корпусе с увиолевым стеклом. Датчики токов, установленные в электрической цепи фотоэлементов, связаны многоканальными кабелями с программно-логическими комплексами, которые кабелями связаны с системным блоком компьютера и телевизионной системой монитора компьютера. Правый и левый карданные подвесы приемников сигналов соединены интегрированными шаговыми сервоприводами с системным блоком компьютера. Технический результат заключается в уменьшении времени поиска воздушного объекта за счет замены обработки информации спектра радиоволн видимого диапазона на спектр радиоволн ультрафиолетового диапазона, независимость определения объекта от помех. 4 ил.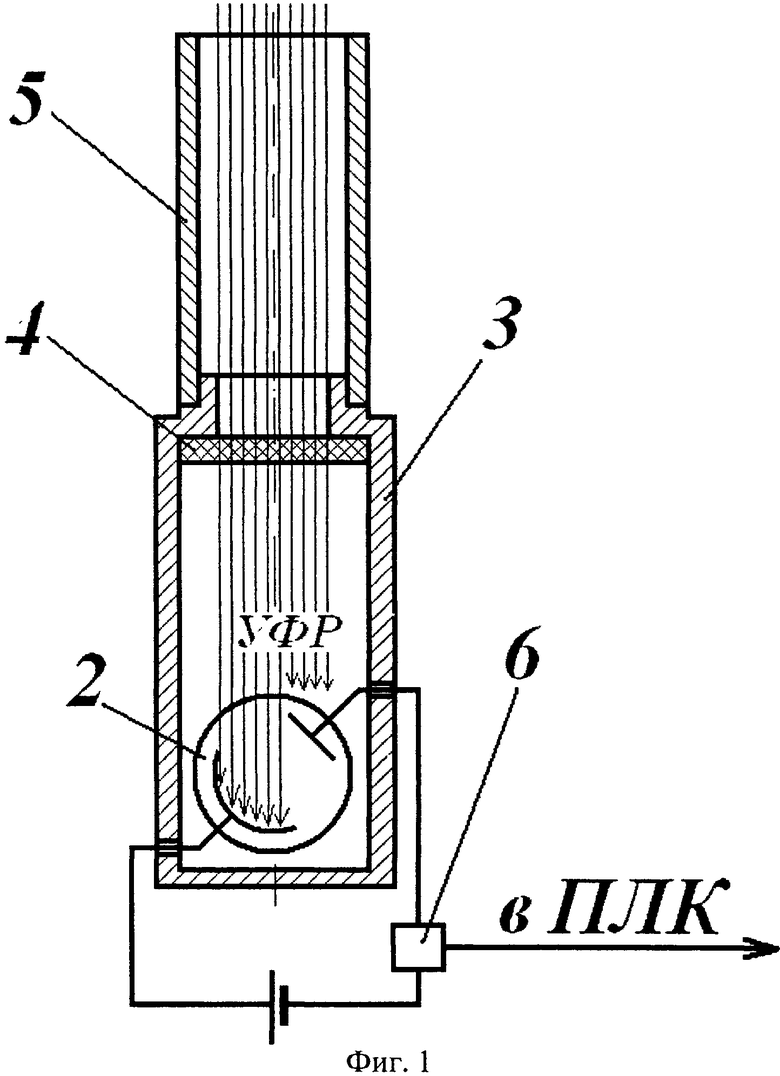
Устройство для обнаружения объекта на удаленном фоне, включающее приемники сигналов, блок обработки сигнала, телевизионную систему, отличающееся тем, что приемники сигналов, установленные на правом и левом карданных подвесах, содержат защищенные тубусами фотоэлементы, установленные в защитном корпусе с увиолевым стеклом, при этом датчики токов, установленные в электрической цепи фотоэлементов, связаны многоканальными кабелями с программно-логическими комплексами, которые кабелями связаны с системным блоком компьютера и телевизионной системой монитора компьютера, при этом правый и левый карданные подвесы приемников сигналов соединены интегрированными шаговыми сервоприводами с системным блоком компьютера.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1988 |
|
RU2042154C1 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| US 4285566 А, 25.08.1981. | |||

