Изобретение относится к авиационным системам с автономно пилотируемыми малогабаритными летательными аппаратами и предназначено для телевизионного мониторинга местности, анализа обстановки и исследования состояния объектов с низких высот в режиме реального времени.
Известна «Система наблюдения за наземной обстановкой» [Патент РФ № 2248307] Система использует беспилотный летательный аппарат для обзора земной поверхности и передачи сигналов, указывающих местоположение наземных объектов. Система включает в себя бортовой комплекс наблюдения и слежения, который состоит из приемника команд, камеры наблюдения и слежения, передатчика изображений, микропроцессора, высотомера, бесплатформенного инерциального блока, аналогово-цифрового преобразователя, бортового форматирующего устройства, блока сжатия данных, двух блоков памяти и корреляционного устройства.
Недостатком системы является ограниченность рабочей дальности действия, связанная с необходимостью использования малоподвижной воздушной платформы вертолетного типа и привязкой видеоизображения к заметно выделяющемуся наземному ориентиру.
Известен «Портативный комплекс авианаблюдений и автономно-пилотируемый летательный микроаппарат для него», выбранный за прототип [Патент РФ № 2232104].
Портативный комплекс авианаблюдений содержит дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом и компасом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами-акселерометрами (БВГА). Дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем портативном контейнере. Комплекс может быть снабжен компасом и портативным персональным компьютером, к входам которого могут быть подключены одометр, инерциальный измерительный блок и наземная приемопередающая аппаратура. Кроме того, на комплексе установлена антенная система, которая включает в себя антенну радиоприемника глобальной навигационной системы, антенну передатчика видеоизображений и антенну бортовой приемопередающей аппаратуры. Летательный аппарат и мобильный комплекс управления выполнены с возможностью размещения в общем контейнере.
Недостатком портативного комплекса авианаблюдений является ограниченность рабочей дальности действия, связанная с ориентацией разработки на вертолетные принципы организации движения, поскольку воздушные платформы самолетного типа обеспечивают существенно большие диапазоны по скоростям, дальностям и высотам полета.
Другой недостаток комплекса связан с привязкой к глобальной навигационной системе, что существенно ограничивает области применения комплекса, в частности, снижает оперативность его развертывания и надежность функционирования.
Задачей предлагаемого изобретения является существенное расширение диапазона дальностей функционирования комплекса за счет перехода на использование летательного аппарата самолетного типа, повышение оперативности развертывания и надежности функционирования комплекса.
Предложен портативный комплекс воздушного базирования оптико-визуального мониторинга, который включает дистанционно пилотируемый летательный аппарат и наземный терминал управления и обработки информации, выполненный с возможностью размещения в общем, контейнере.
Наземный терминал содержит процессор с монитором, автономную навигационную систему, состоящую из радиодальномера, барометра и антенным модуля с компасом на поворотном устройстве с приводом, приемопередатчик канала управления и антенну канала управления.
Дистанционно пилотируемый летательный аппарат содержит фюзеляж, внутри которого размещены элементы питания, система обеспечения полета, приемопередающая аппаратура и система сбора видеоинформации. На фюзеляже также размещены винтовой движитель, сервоприводы рулевого управления по курсу и тангажу, система аварийной парашютной посадки и радиомаяк, при этом вход системы аварийной посадки соединен с выходом процессора, а вход радиомаяка - с выходом системы аварийной посадки.
Бортовая система обеспечения полета содержит процессор, сенсоры, фазометр системы автоматического возврата и сервоприводы. Входы фазометра соединены с антеннами приемопередающей аппаратуры, а его выход подсоединен ко входу бортового процессора. В состав сенсоров наряду с микромеханическими трехмерными датчиками угловых скоростей и ускорений, составляющими бесплатформенный инерциальный блок БВГА, входят трехмерный электронный компас и оптический датчик горизонта, размещенный на внешней поверхности фюзеляжа и подсоединенный к бортовому процессору, два миниатюрных барометра, расположенных в приборном отсеке фюзеляжа и подсоединенных к бортовому процессору. При этом один из них соединен с трубкой Пито, выведенной из фюзеляжа в направлении движения летательного аппарата.
Электронный компас и оптический датчик горизонта служат для калибровки и динамической коррекции датчиков угловых скоростей, один из барометров служит для измерения статического давления и определения высоты полета, а второй - для измерения динамического давления и скорости встречного потока при помощи трубки Пито.
Сервоприводы управляют элеронами и другими элементами несущих плоскостей летательного аппарата, а также наклонами мониторинговой камеры. Бортовая система обеспечения полета формирует сигналы управления на сервоприводы, задающие положение элеронов летательного аппарата в соответствие с курсом и углом атаки, определенными заложенной в нее программой, хранимой в бортовом процессоре, и показаниями сенсорной бортовой аппаратуры. Она осуществляет также изменение курса или режима полета в соответствие с заложенной программой и внесение изменений в программу, задаваемых оператором в супервизорном режиме управления по радиочастотному каналу управления. Радиочастотный канал управления используется также для передачи телеметрической информации с борта летательного аппарата на наземный терминал, формирования сигналов радиодальномера и системы возврата к наземному терминала. Сигналы радиодальномера служат для определения расстояния от летательного аппарата до наземного терминала в автономной навигационной системе комплекса.
Бортовая приемопередающая аппаратура содержит передатчик видеосигнала с антенной, а также дополнительный бортовой радиодальномер, расположенный в приборном отсеке, и дополнительную антенну для приема сигналов управления, закрепленную на несущей плоскости фюзеляжа, и приемопередатчик телеметрического сигнала.
Система сбора видеоинформации содержит две миниатюрные телевизионные видеокамеры, одна из которых, обзорная, с широким полем зрения жестко закреплена на фюзеляже и обеспечивает обзор местности в направлении полета летательного аппарата вплоть до линии горизонта. Вторая, мониторинговая, с узким полем зрения закреплена в подвесе, обеспечивающем управляемые наклоны ее оптической оси в двух направлениях относительно нормали к плоскости крыльев в направлении земной поверхности при штатном горизонтальном полете аппарата. Амплитуда наклона обеспечивает возможность пересечения полей зрения мониторинговой и обзорной камер. Это дает возможность оператору переключать вход передатчика видеосигнала с одной камеры на другую, управлять направлением оптической оси мониторинговой камеры, а также реализовать режим стабилизации оси мониторинговой камеры по сигналам с датчиков угловых скоростей (гироскопов) бортовой системы обеспечения полета.
Комплекс дополнительно содержит автономную систему навигации, расположенную на наземном терминале. В состав автономной навигационной системы входят система дальномера, барометрический разностный высотомер, состоящий из наземного и бортового барометра, и наземный курсовой индикатор на базе компаса, выход которого соединен с наземным процессором, и фазометра, входы которого соединены с выходами антенн приема видеосигнала, а выход - с входом привода.
Система дальномера состоит из радиодальномера и приемопередатчика с антенной, установленных на борту летательного аппарата, наземных приемопередатчика с антенной и радиодальномера, обеспечивающего измерение задержки распространения радиосигнала. Барометрический высотомер служит для определения высоты полета летательного аппарата по разности атмосферного давления, измеряемого при помощи барометров, один из которых установлен на борту, а второй - на наземном терминале.
Наземный курсовой индикатор представляет собой электронный компас, жестко зафиксированный относительно модуля антенн приема видеосигнала, установленного на поворотном устройстве на наземном терминале. Привод поворотного устройства обеспечивает прецизионное наведение модуля антенн на летательный аппарат в горизонтальной плоскости за счет обнуления разности фаз между сигналами с разнесенных приемников видеосигнала.
Наземный терминал наряду с вращающимся антенным модулем содержит стационарную антенну радиочастотного канала управления и телеметрии, приемопередающую аппаратуру и компьютер (процессор с монитором и вспомогательными периферийными устройствами) для программирования полета, привязки к электронной карте местности, отображения видеоинформации и динамической корректировки программы полета.
Автономная навигационная система является дополнительной к датчику GPS - глобальной навигационной системы, установленному на борту летательного аппарата, и используется для корректировки курса полета в тех случаях, когда использование глобальной навигационной системы затруднено или нежелательно.
В режиме полета на мониторе компьютера наземного терминала отображаются три окна, в одно из которых выводится видеоинформация, во второе - карта местности с отображением положения летательного аппарата и полей зрения телекамер, а в третье - телеметрическая информация. Полет летательного аппарата осуществляется автономно, по заранее программно заданному маршруту, коррекция которого в реальном времени осуществляется оператором в супервизорном режиме. При этом вводимые команды представляют собой законченные подпрограммы, нацеленные на изменение курса и высоты полета, а также включение или выключение режима барражирования, отработка которых осуществляется бортовой системой обеспечения полета в автоматическом режиме пилотирования.
На чертеже представлена блок-схема портативного комплекса воздушного базирования оптико-визуального мониторинга.
Наземный терминал комплекса содержит монитор 1, процессор 2, антенный модуль 3 с компасом 4 и приводом 5, фазометр 6, наземный радиодальномер 7, наземный барометр 8, приемопередатчик 9 и антенну 10. Летательный аппарат комплекса содержит антенну 11, передатчик видеосигнала 12, обзорную 13 и мониторинговую 14 камеры, бортовой радиодальномер 15, процессор 16, сервоприводы 17, движитель 18, приемопередатчик 19, фазометр 20, антенный модуль 21, сенсоры 22, включая блок вибрационных гироскопов и акселерометров 23, датчик глобальной навигационной системы 24, компас 25, барометры 26 и оптический датчик горизонта 27, а также систему аварийной посадки 28, радиомаяк 29 и трубку Пито 30.
Монитор 1 служит для отображения видеоизображения, карты местности и ключевых параметров комплекса, поступающих на него с процессора 2 (вспомогательные периферийные устройства компьютера наземного терминала на чертеже не приведены). Видеосигнал поступает в процессор с антенного модуля 3, на котором жестко закреплен компас 4, передающий в процессор 2 информацию о направлении на летательный аппарат, для чего управляющий привод 5 поворачивает модуль 3 так, чтобы на фазометре 6 разность фаз сигналов с горизонтально разнесенных антенн сохранялась равной нулю. В процессор 2 также поступает информация о дальности до летательного аппарата с радиодальномера 7 и о приповерхностном атмосферном давлении с барометра 8, используемом в качестве опорного при вычислении высоты летательного аппарата.
Сигналы управления (изменения программы полета летательного аппарата) с процессора 2 передаются на борт летательного аппарата через приемопередатчик 9 и антенну 10. Приемопередатчик 9 и антенна 10 используются также для приема телеметрической информации с борта летательного аппарата и передаче ее на вход процессора 2. Кроме того, они используются для передачи и приемов сигналов системы дальномера, для чего выходы и входы приемопередатчика 9 также соединены со входами и выходами радиодальномера 7.
Видеосигнал с борта летательного аппарата на антенный модуль 3 поступает через антенну 11 с передатчика видеосигнала 12. В совокупности передатчик 12, антенна 11 и антенный модуль 3 составляют канал передачи видеосигнала, который поступает на вход передатчика 12 либо с обзорной камеры 13, либо с мониторинговой камеры 14.
Радиодальномер 15 служит для формирования ответного радиоимпульса системы дальномера, с него в бортовой процессор 16 поступает информация о наличии радиосвязи с наземным терминалом. Процессор 16 по командам с наземного терминала управляет переключением входа передатчика видеосигнала 12 с обзорной камеры 13 на мониторинговую камеру 14. Также процессор 16 обеспечивает управление всеми бортовыми сервоприводами 17, два из которых управляют направлением оси мониторинговой камеры 14, и движителем 18, задавая скорость вращения винта.
Передачу сигналов телеметрии и прием сигналов управления процессор 16 осуществляет через приемопередатчик 19, который используется также системой дальномера, для чего входы и выходы приемопередатчика 19 подключены к выходам и входам радиодальномера 15. Фазометр 20 служит для определения направления на наземный терминал в режиме автоматического возврата летательного аппарата, для чего измеряет разность с двух разнесенных антенн антенного модуля 21. Информация о разности фаз поступает в процессор 16. Приемопередатчик 19, антенный модуль 21, антенна 10 и приемопередатчик 9 в совокупности составляют канал управления и телеметрии, используемый дополнительно системой дальномера.
Для определения параметров полета используются бортовые сенсоры 22, в состав которых входят блок 23 вибрационных гироскопов и акселерометров (БВГА), датчик 24 системы глобального позиционирования (GPS), компас 25, два барометра 26, один из которых служит для определения высоты полета, а другой - для измерения относительной скорости, и оптический датчик горизонта 27, состоящий из четырех инфракрасных приемников, оси которых повернуты друг относительно друга на 90° в горизонтальной плоскости. Информация с сенсоров 22 передается в процессор 16.
Процессор 16 периодически формирует сигнал, подтверждающий его работоспособное состояние на вход системы аварийной посадки 28 и радиомаяка 29. При зависании процессора 16 и пропадании указанного сигнала включение этих систем осуществляется автоматически.
Для измерении скорости встречного потока по разности статистического и динамического давлений один из барометров в составе бортовых сенсоров 20 подсоединен к трубке Пито 30, выведенной из фюзеляжа в направлении носовой части летательного аппарата.
Функционирование комплекса осуществляется следующим образом. Перед началом полета оператор включает питание наземного терминала, загружает необходимое программное обеспечение и вводит в процессор 2 наземного терминал программу полета либо с привязкой к карте местности, которая также вводится в процессор 2, либо в относительных координатах, когда центром системы координат является точка старта, а нулевой угол определяется по положению летательного аппарата.
После ввода программы полета оператор размещает летательный аппарат на стартовой катапульте (не показанной на чертеже, поскольку возможен и запуск с руки), включает питание летательного аппарата и отдает команду на инициализацию всех систем комплекса. По этой команде процессор 2 вводит программу полета в процессор 16 и осуществляет предполетную проверку работоспособности всех систем, включая каналы связи, системы ориентации, навигации, сбора видеоинформации, управления приводами, аварийной посадки и радиомаяка. Визуально в ходе предстартового тестирования оператор последовательно (по подсказкам компьютера наземного терминала) проверяет и подтверждает подвижность всех сервоприводов, работу движителя на холостом ходу, а также наличие видеосигнала. В экстренных случаях данная процедура может быть пропущена, для чего оператору необходимо подтвердить свое решение о взлете без предстартового тестирования. Одновременно с предстартовым тестированием осуществляется калибровка сенсорной аппаратуры и определение географических координат по системе глобального позиционирования.
Получив подтверждение о готовности к старту всех систем комплекса, оператор отдает команду на старт. Получив команду о старте с процессора 2, бортовой процессор 16 увеличивает обороты движителя 18, а процессор 2, получив подтверждение от процессора 16, инициализирует спусковое устройство стартовой катапульты.
В процессе полета процессор 16 данные об ориентации летательного аппарата, поступающие с гироскопов и акселерометров 23, сравнивает с программно заданными курсом и тангажом (или углом атаки), добиваясь их максимального соответствия при помощи сервоприводов 17 рулей высоты и курса. Данные с датчика горизонта 27 и компаса 25 используются для динамической коррекции гироскопов. Процессор 16 определяет также абсолютную и относительную скорости полета летательного аппарата. Определение абсолютной скорости (относительно наземного терминала) осуществляется по показаниям навигационной системы (глобальной или автономной), а определение относительной (по отношению к окружающей воздушной среде) - по разности показаний бортовых барометров 26. Обеспечение программно заданной скорости полета процессор 16 обеспечивает за счет управления скоростью вращения винта движителя 18.
При функционировании глобальной навигационной системы информация о положении летательного аппарата регулярно по каналу управления и телеметрии с бортового процессора 16 передается в процессор наземного терминала 2. При функционировании автономной навигационной системы информация о положении летательного аппарата столь же регулярно и тем же каналом передается с процессора 2 на процессор 16.
При необходимости детального мониторинга по команде оператора процессор 16 переключает вход канала передачи видеосигнала с обзорной камеры 13 на мониторинговую 14, при этом включается режим стабилизации оси мониторинговой камеры. В указанном режиме сервоприводы 17 мониторинговой камеры компенсируют угловые колебания летательного аппарата по показаниям гироскопов БВГА 23. Одновременно оператор может в некоторых пределах управлять направлением оси мониторинговой камеры 14. При приближении к границе рабочего диапазона углов мониторинговой камеры на экран монитора 1 выводится предупреждение. В этом случае для продолжения наблюдения за интересуемой зоной подстилающей поверхности оператору необходимо ввести коррекцию в программу полета (например, задать режим барражирования над интересующим его районом).
Работа автономной навигационной системы осуществляется следующим образом: по каналу управления и телеметрии в нее поступает информация о показаниях бортового барометра 26 для вычисления высоты летательного аппарата. С компаса 4 на поворотном устройстве антенного модуля 3 поступает информация о направлении на летательный аппарат, а с радиодальномера 7 - информация о расстоянии до него. Вычисление расстояния до летательного аппарата в системе дальномера осуществляется по задержке сигнала отклика, синхронизированного с сигналом запроса (оба сигнала формируются на базе уникальных последовательностей импульсов). На базе этих данных процессор рассчитывает положение летательного аппарата и использует эту информацию для привязки видеоизображения, поступающего в процессор с антенны видеосигнала, к карте местности.
При сбоях в работе навигационных систем по команде оператора, включающей режим автоматического возврата летательного аппарата к наземному терминалу, процессор 16 по данным фазометра 20 определяет курс на наземный терминал и обеспечивает возвращение. Когда расстояние до наземного терминала оказывается меньше заданного (как правило, порядка 10-20 м), процессор 16 выключает движитель и включает систему аварийной парашютной посадки 28, максимально снижающей риск повреждения для летательного аппарата и людей на подстилающей поверхности. Оператор подбирает летательный аппарат, отключает питание радиомаяка и всего комплекса в целом.
Техническим результатом изобретения является расширение диапазона дальности функционирования за счет перехода к автономной воздушной платформе самолетного типа при одновременном существенном снижении требований к квалификации оператора в области пилотирования, а также расширение потенциальных возможностей комплекса за счет использования автономной навигационной системы и двухкамерной системы мониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ТЕРМИНАЛ ОБМЕНА И ДОВЕДЕНИЯ ИНФОРМАЦИИ | 2022 |
|
RU2793068C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
Изобретение относится к авиационным системам с автономно пилотируемыми малогабаритными летательными аппаратами и предназначено для телевизионного мониторинга местности, анализа обстановки и исследования состояния объектов с низких высот в режиме реального времени. Имеются дистанционно пилотируемый летательный аппарат и наземный терминал управления и обработки информации. Наземный терминал содержит процессор с монитором, автономную навигационную систему, состоящую из радиодальномера, барометра и антенного модуля с компасом на поворотном устройстве с приводом, приемопередатчик и антенну канала управления. Летательный аппарат содержит фюзеляж, систему обеспечения полета, приемопередающую аппаратуру и систему сбора видеоинформации. На фюзеляже размещены винтовой движитель, сервоприводы рулевого управления по курсу и тангажу, система аварийной парашютной посадки и радиомаяк. Бортовая система обеспечения полета содержит процессор, сенсоры, фазометр системы автоматического возврата и сервоприводы. В состав сенсоров, наряду с микромеханическими трехмерными датчиками угловых скоростей и ускорений, входят трехмерный электронный компас, оптический датчик горизонта, размещенный на внешней поверхности фюзеляжа, и два расположенных в приборном отсеке фюзеляжа барометра, один из которых соединен с трубкой Пито. Бортовая приемопередающая аппаратура содержит передатчик видеосигнала с антенной, а также дополнительный бортовой радиодальномер и дополнительную антенну для приема сигналов управления. Система сбора видеоинформации содержит две телевизионные видеокамеры - обзорную и мониторинговую. Предложенный комплекс позволяет расширить диапазон дальности функционирования за счет перехода к автономной воздушной платформе самолетного типа при одновременном существенном снижении требований к квалификации оператора в области пилотирования. Комплекс обладает также повышенной оперативностью развертывания и надежностью функционирования за счет использования автономной навигационной системы и двухкамерной системы мониторинга. 1 ил.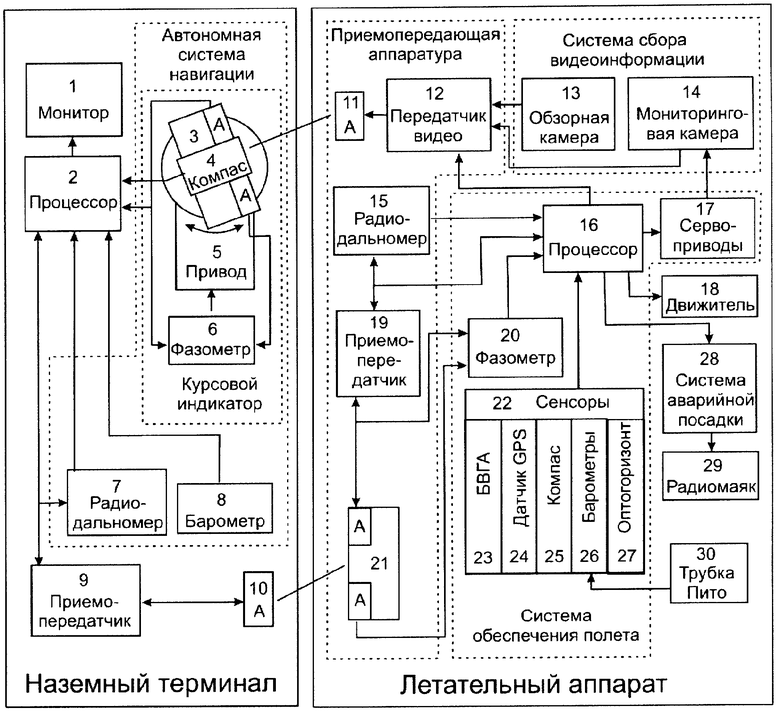
Портативный комплекс воздушного базирования оптико-визуального мониторинга, содержащий автономно пилотируемый летательный аппарат с бортовой системой обеспечения полета, бортовой приемопередающей аппаратурой и системой сбора видеоинформации, имеющей первую видеокамеру, соединенную с передатчиком видеосигнала, а также наземный терминал приема видеосигнала и коррекции полета летательного аппарата, размещенные в общем контейнере, отличающийся тем, что наземный терминал дополнительно содержит автономную систему навигации, состоящую из радиодальномера, барометра и курсового индикатора, выходы которых соединены с наземным процессором, при этом в состав курсового индикатора входит компас, жестко закрепленный вместе с модулем антенн приема видеосигнала на поворотном устройстве с приводом, обеспечивающем вращение вокруг вертикальной оси, и фазометр, входы которого соединены с выходами антенн приема видеосигнала, а выход - со входом привода, бортовая приемопередающая аппаратура дополнительно содержит бортовой радиодальномер, расположенный в приборном отсеке, и дополнительную антенну для приема сигналов управления, закрепленную на несущей плоскости фюзеляжа, бортовая система обеспечения полета дополнительно содержит оптический датчик уровня горизонта, размещенный на внешней поверхности фюзеляжа и подсоединенный к бортовому процессору, два расположенных в приборном отсеке фюзеляжа и подсоединенных к бортовому процессору миниатюрных барометра, один из которых соединен с трубкой Пито, выведенной из фюзеляжа в направлении движения летательного аппарата, и фазометр, входы которого соединены с антеннами приемопередающей аппаратуры, а выход подсоединен к входу бортового процессора, система сбора видеоинформации дополнительно содержит вторую видеокамеру, причем первая видеокамера, обзорная, жестко закреплена на нижней стороне фюзеляжа в направлении движения летательного аппарата и имеет центральную верхнюю границу поля зрения, совпадающую с направлением движения летательного аппарата, а вторая видеокамера, мониторинговая снабжена сервоприводами наклонов и закреплена на подвесе в нижней части фюзеляжа с возможностью направления оптической оси в центральном положении вниз перпендикулярно несущим плоскостям летательного аппарата, последний дополнительно содержит систему аварийной парашютной посадки и радиомаяк с антенной и автономным питанием, расположенные в фюзеляже летательного аппарата, при этом вход системы аварийной посадки соединен с выходом процессора, а вход радиомаяка с выходом системы аварийной посадки.
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| АВИАЦИОННЫЙ РАЗВЕДОВАТЕЛЬНЫЙ КОМПЛЕКС | 1992 |
|
RU2067952C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ АВИАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2015067C1 |

