Система относится к области космического тренажеростроения и предназначена для управления вертикальным перемещением скафандра с человеком, приобретающим навыки работы в открытом космосе.
Известно устройство для обезвешивания вертикально перемещающейся маложесткой механической системы космического аппарата, описанное в патенте РФ №2273592, кл. B64G 7/00 и опубликованное в БИ №10, 2006 г. Устройство содержит противовес, соединяемый тросом, проходящим через установленные на опорной стойке блоки, с указанной маложесткой механической системой, снабженной фиксирующим замком для удержания этой системы на космическом аппарате, опорная стойка закреплена на космическом аппарате и снабжена приемной площадкой, установленной с возможностью взаимодействия с ней противовеса, на приемной площадке со стороны противовеса закреплена амортизирующая прокладка, при этом опорная стойка состоит из приемного рычага, несущего угольника и фиксирующего кронштейна, закрепленного на космическом аппарате, при этом приемный рычаг и несущий угольник связаны между собой горизонтальной регулируемой вставкой, несущий угольник и фиксирующий кронштейн связаны между собой вертикальной регулирующей вставкой, при этом указанные блоки шарнирно установлены на приемном рычаге и несущем угольнике, приемная площадка закреплена на фиксирующем кронштейне, а трос выполнен в виде ленты с нанесенной на ее поверхность размерной линейкой и намотан на приемную катушку, шарнирно закрепленную на противовесе и снабженную фиксатором.
Данное устройство не позволяет автоматически управлять процессом перемещения груза (маложесткой механической системы космического аппарата).
Наиболее близким по своей технической сущности и достигаемому техническому эффекту к предлагаемому изобретению является система управления вертикальным перемещением обучаемым на тренажере выхода в космос (статья Кравченко О.А., Хализева М.А. Повышение качества информационного обеспечения силокомпенсационных систем применением фаззи-регулятора // Электромеханика. - 2003. - №5. - С.37-41).
Система управления вертикальным перемещением обучаемого на тренажере выхода в космос содержит груз (скафандр с обучаемым), задатчик веса груза, последовательно соединенные датчик времени и фаззи-регулятор, а также последовательно соединенные задатчик момента электродвигателя, сумматор, устройство регулирования момента (регулятор момента с управляемым преобразователем напряжения), электродвигатель, передаточное устройство (редуктор, барабан, канатная передача и направляющие блоки), датчик усилия, блок выделения разности усилий, регулятор усилия, выход которого соединен со вторым входом сумматора, причем второй вход блока выделения разности усилий подключен к выходу задатчика веса груза, третий вход блока выделения разности усилий подключен к выходу фаззи-регулятора, второй вход которого связан с выходом блока выделения разности усилий, а скафандр с обучаемым подключен к выходу передаточного устройства (к нижнему направляющему блоку).
Данная система обеспечивает управление вертикальным перемещением обучаемого на тренажере выхода в космос, однако имеет низкую точность, поскольку не предусматривает автоматическую коррекцию показаний датчика усилия при изменении суммарного веса скафандра с обучаемым и при его перемещении по вертикали.
Задачей предлагаемого изобретения является повышение точности управления вертикальным перемещением обучаемого на тренажере выхода в открытый космос за счет автоматической коррекции показаний датчика усилия.
Задача достигается тем, что система управления вертикальным перемещением обучаемого на тренажере выхода в космос содержит скафандр с обучаемым, задатчик веса груза, последовательно соединенные задатчик момента электродвигателя, сумматор, устройство регулирования момента, электродвигатель, передаточное устройство, датчик усилия, блок выделения разности усилий и регулятор усилия, второй вход блока выделения разности усилий подключен к выходу задатчика веса груза, скафандр с обучаемым соединен с выходом передаточного устройства, датчик положения, подключенный к выходу (к валу) электродвигателя, индикатор нуля, индикатор отказа датчика усилия, последовательно соединенные кнопка запуска коррекции, первый блок коррекции и ключ, второй вход которого подключен к выходу регулятора усилия, а выход связан со вторым входом сумматора, а также последовательно соединенные датчик скорости и второй блок коррекции, выход которого соединен с третьим входом блока выделения разности усилий, причем вход индикатора нуля соединен с первым выходом первого блока коррекции, второй выход которого связан с четвертым входом блока выделения разности усилий, выход датчика положения соединен со вторым входом второго блока коррекции, третий вход которого подключен к первому выходу первого блока коррекции, выход блока выделения разности усилий связан со вторым входом первого блока коррекции, к третьему выходу которого подключен индикатор отказа датчика усилия, третий вход первого блока коррекции подключен к выходу датчика усилия, а к валу электродвигателя подключен вход датчика скорости.
На фиг.1 приведена функциональная схема системы управления вертикальным перемещением обучаемого на тренажере выхода в космос, фиг.2 поясняет конструкцию механической части тренажера выхода в космос, на фиг.3 приведена структурная схемы алгоритма работы первого блока коррекции, а на фиг.4 и фиг.5 приведена структурная схемы алгоритма работы второго блока коррекции.
Система управления вертикальным перемещением обучаемого на тренажере выхода в космос (см. фиг.1) содержит скафандр с обучаемым 1, задатчик веса груза 2, датчик положения 3, индикатор нуля 4, индикатор отказа датчика усилия 5, последовательно соединенные задатчик момента электродвигателя 6, сумматор 7, устройство регулирования момента 8, электродвигатель 9, передаточное устройство 10, датчик усилия 11, блок выделения разности усилий 12, регулятор усилия 13, последовательно соединенные кнопка запуска коррекции 14, первый блок коррекции 15 и ключ 16, второй вход которого подключен к выходу регулятора усилия 13, а выход связан со вторым входом сумматора 7, а также последовательно соединенные датчик скорости 17 и второй блок коррекции 18, второй вход которого подключен к выходу датчика положения 3, причем второй вход блока выделения разности усилий 12 подключен к выходу задатчика веса груза 2, третий вход блока выделения разности усилий 12 подключен к выходу второго блока коррекции 18, скафандр с обучаемым 1 соединен с выходом передаточного устройства 10, вход индикатора нуля 4 подключен к первому выходу первого блока коррекции 15, второй выход которого связан с четвертым входом блока выделения разности усилий 12, третий вход второго блока коррекции 18 подключен к первому выходу первого блока коррекции 15, второй вход первого блока коррекции 15 подключен к выходу блока выделения разности усилий 12, третий вход первого блока коррекции 15 подключен к выходу датчика усилия 11, к валу электродвигателя 9 подключены входы датчика скорости 17 и датчика положения 3, а к третьему выходу первого блока коррекции 15 подключен индикатор отказа датчика усилия 5.
Система работает следующим образом.
При включении система переводится в исходное состояние, в котором на всех выходах первого блока коррекции 15 и выходе второго блока коррекции 18 сигналы равны нулю. Нулевые значения выходных сигналов первого блока коррекции 15 приводят к тому, что ключ 16 размыкает контур автоматического управления усилием, состоящий из задатчика веса груза 2, блока выделения разности усилий 12, регулятора усилия 13, ключа 16, задатчика момента электродвигателя 6, сумматора 7, устройства регулирования момента 8, электродвигателя 9, передаточного устройства 10 и датчика усилия 11. При этом индикатор нуля 4, индикатор отказа датчика усилия 5 и ключ 16 выключены, а система находится в режиме ручного управления, когда сигнал от задатчика момента электродвигателя 6 через сумматор 7 подается на вход устройства регулирования момента 8. Управление перемещением скафандра с обучаемым 1 по вертикали осуществляется оператором-методистом в ручном режиме с помощью задатчика момента электродвигателя 6. При этом скафандр с обучаемым 1 выводится в исходную (например, среднюю) точку диапазона перемещения по вертикали, а скорость и ускорение движения скафандра с обучаемым 1 определяется задатчиком момента электродвигателя 6, по выходному сигналу которого посредством устройства регулирования момента 8 определяется момент на валу электродвигателя 9, соответствующий такому развиваемому электродвигателем 9 усилию, при котором он с помощью передаточного устройства 10 может удерживать скафандр с обучаемым 1 на весу и перемещать его по вертикали, преодолевая силу тяжести скафандра с обучаемым 1, а также вес и сопротивление механических элементов, входящих в состав передаточного устройства 10. После установки скафандра с обучаемым 1 в заданной точке диапазона перемещения по вертикали электродвигатель 9 останавливается с помощью задатчика момента электродвигателя 6 в таком положении, когда создаваемое им усилие полностью компенсирует не только вес скафандра с обучаемым, но вес и силу сопротивления элементов механической цепи, соединяющей электродвигатель 9 со скафандром с обучаемым 1.
Сигнал с выхода задатчика веса груза 2, соответствующий среднему суммарному весу FCP скафандра с обучаемым 1, поступает на второй вход блока выделения разности усилий 12, на первый вход которого поступает выходной сигнал F датчика усилия 11, пропорциональный фактическому суммарному весу Р скафандра с обучаемым 1. В общем случае суммарный вес Р скафандра с обучаемым 1 не соответствует заранее установленному среднему значению FCP, поэтому в результате сравнения выходных сигналов задатчика веса груза 2 и датчика усилия 11 на выходе блока выделения разности усилий 12 формируется сигнал рассогласования усилий ΔF, пропорциональный разности (FCP-F) и отличающийся в общем случае от нулевого значения. Компенсация сигнала рассогласования усилий ΔF начинается по нажатию кнопки запуска коррекции 14, сигнал от которой поступает на первый вход первого блока коррекции 15. По этому сигналу первый блок коррекции 15 анализирует поступающий на его третий вход сигнал от датчика усилия 11. Если сигнал от датчика усилия 11 выходит за допустимые для него пределы изменения, то первый блок коррекции 15 не выполняет компенсацию сигнала рассогласования усилий ΔF, а формирует на своем третьем выходе сигнал, включающий индикатор отказа датчика усилия 5. Если сигнал от датчика усилия 11 находится в допустимых пределах изменения, то первый блок коррекции 15 переходит к процессу компенсации сигнала рассогласования усилий ΔF, поступающего на его второй вход от блока выделения разности усилий 12. Компенсация сигнала ΔF осуществляется путем формирования на втором выходе первого блока коррекции 15 линейно нарастающего по амплитуде сигнала коррекции, подаваемого на четвертый вход блока выделения разности усилий 12 и имеющего такую полярность, которая приводит к уменьшению величины сигнала ΔF. Например, если блок выделения разности усилий 12 представляет собой обычный алгебраический сумматор, то полярность сигнала коррекции противоположна полярности сигнала ΔF. Темп нарастания сигнала коррекции на втором выходе первого блока коррекции 15 выбирается таким, чтобы при максимально допустимом рассогласовании сигналов от датчика усилия 11 и задатчика веса груза 2 не происходило рывков в движении скафандра с обучаемым 1. В процессе компенсации сигнала ΔF первый блок коррекции 15 проверяет на равенство нулю выходной сигнал ΔF блока выделения разности усилий 12. Когда сигнал ΔF становится равным нулю, что свидетельствует об окончании коррекции процесса обезвешивания, первый блок коррекции 15 формирует на своем первом выходе сигнал, который включает индикатор нуля 4, оповещающего оператора-методиста об окончании процесса обезвешивания. Одновременно сигнал с первого выхода первого блока коррекции 15 поступает на третий вход второго блока коррекции 18, запуская его на выполнение коррекции показаний датчика усилия во время тренировки. Сигнал с первого выхода первого блока коррекции 15 поступает также на ключ 16, который соединяет выход регулятора усилия 13 со вторым входом сумматора 7 и замыкает контур управления усилием в автоматическом режиме работы. Поскольку сигнал на выходе блока выделения разности усилий 12 равен нулю, сигнал на входе устройства регулирования момента 8 остается соответствующим сигналу с выхода задатчика момента 6 и скафандр с обучаемым 1 остается неподвижным.
Автоматический режим соответствует штатной деятельности обучаемого в процессе выполнения тренировочного задания, когда он, опираясь на конструктивные элементы учебных стендов, прилагает усилия в вертикальном направлении. Эти усилия, в зависимости от их величины и продолжительности, а также инерционности электродвигателя 9 и сил трения в элементах передаточного устройства 10, приводят к соответствующему перемещению скафандра с обучаемым 1 в направлении, противоположном направлению прилагаемых усилий. Эти усилия вызывают пропорциональное их величине изменение показаний датчика усилия 11 на величину ΔF, что, в свою очередь, вызывает появление сигнала рассогласования ΔF на выходе блока выделения разности усилий 12. По сигналу ΔF регулятор усилия 13 рассчитывает сигнал управляющего воздействия, например, по закону пропорционально-дифференциального управления и выдает его через замкнутый ключ 16 на сумматор 7. Сигнал управляющего воздействия, сформированным регулятором усилия 13, складывается в сумматоре 7 с выходным сигналом задатчика момента электродвигателя 6 и подается на вход устройства регулирования момента 8. Изменение сигнала на входе устройства регулирования момента 8 приводит к изменению управляющего сигнала, подаваемого с его выхода на электродвигатель 9 и определяющего момент на валу электродвигателя 9. Поэтому в результате приложения внешнего усилия к скафандру со стороны обучаемого происходит изменение момента на валу электродвигателя 9, причем таким образом, что этот измененный момент создает дополнительное усилие, направленное встречно прилагаемому обучаемым усилию. Таким образом, электродвигатель 9, кроме непосредственно обезвешивания скафандра с обучаемым 1, оказывает на него дополнительное воздействие, помогающее обучаемому преодолеть трение и инерционность механических элементов передаточного устройства 10. Движение скафандра с обучаемым 1 на тренажере выхода в космос независимо от его направления происходит со скоростью, пропорциональной величине приложенного обучаемым усилия до тех пор, пока обучаемый прилагает усилие, и продолжается некоторое время после снятия усилия за счет движения по инерции.
В процессе выполнения обучаемым тренировочного задания возможно искажение вызванного усилиями обучаемого рассогласования усилий ΔF=FCP-F из-за изменения суммарного веса Р (F пропорционально Р) скафандра с обучаемым 1 за счет присоединенного во время работы обучаемого веса, например, рабочего инструмента. Поскольку присоединенный вес значительно меньше суммарного веса Р скафандра с обучаемым 1, то воздействие присоединенного веса рабочего инструмента приводит к медленному перемещению скафандра с обучаемым 1 вниз. Для компенсации воздействия присоединенного веса рабочего инструмента при отсутствии усилий со стороны обучаемого необходимо нажать кнопку запуска коррекции 14, что вызовет автоматическую коррекцию показаний датчика усилия 11 в соответствии с описанной выше процедурой обезвешивания. При этом процесс обезвешивания происходит без рывков из-за плавного изменения величины корректирующего сигнала и завершается полной остановкой самопроизвольного движения скафандра с обучаемым 1.
Точность управления вертикальным перемещением оценивается по симметрии величины и скорости перемещения скафандра с обучаемым 1 вверх и вниз при приложении одинаковых усилий обучаемым в обоих направлениях. На точность вертикального перемещения скафандра с обучаемым 1 отрицательно влияет силовое воздействие жгута из трубопроводов и электрических кабелей системы жизнеобеспечения и контроля состояния обучаемого (обеспечения воздухом, водяного охлаждения, медико-биологического контроля и других). Силовое воздействие жгута изменяется приблизительно по линейному закону при движении скафандра с обучаемым 1 от нижней к верхней точке допустимого диапазона перемещения и вызывает искажения показаний датчика усилия 11. Компенсацию воздействия сопротивления жгута в системе осуществляет второй блок коррекции 18, который запускается поступающим на его третий вход сигналом признака окончания процесса обезвешивания, формируемым на первом выходе первого блока коррекции 15. По этому сигналу второй блок коррекции 18 анализирует поступающий на его первый вход сигнал от датчика скорости 17 и при превышении им минимального уровня скорости осуществляет коррекцию сигнала усилия, формируя на своем выходе сигнал коррекции, подаваемый на третий вход блока выделения разности усилий 12. При этом второй блок коррекции 18 анализирует поступающий на его второй вход выходной сигнал датчика положения 3 и при каждом изменении его показаний на выбранную единицу точности измерения перемещения в зависимости от направления движения увеличивает или уменьшает сигнал на своем выходе на соответствующую величину. Зависимость сопротивления жгута от положения скафандра с обучаемым 1 по вертикали между крайними точками диапазона перемещения имеет примерно линейный характер, поэтому величина приращения корректирующего сигнала на выходе второго блока коррекции 18 является постоянной, а коррекция выполняется в течение всей тренировки. Если в процессе тренировки обучаемого на второй вход второго блока коррекции 18 будут поступать сигналы от датчика положения 3 при отсутствии движения скафандра с обучаемым 1 (например, при выходе из строя датчика положения 3), то сигнал от датчика скорости 17 не превысит минимального значения, что сразу же обнаруживает второй блок коррекции 18, который прекращает дальнейшую корректировку показаний датчика усилия 11. При этом тренировка продолжается, но с пониженными показателями точности управления вертикальным перемещением скафандра с обучаемым 1.
Механическая часть системы управления вертикальным перемещением с обучаемого на тренажере выхода в космос (см. фиг.2) содержит электродвигатель 9 с подключенными к его валу датчиком положения 3 и датчиком скорости 17 (на фиг.2 не показаны), который через редуктор 19 соединен барабаном 20 передаточного механизма 10. Кроме редуктора 19 и барабана 20, в состав передаточного механизма 10 входит выполненная в две ветви канатная передача 21, связанная через направляющие блоки 22, 23 и 24 с балансиром 25, который позволяет автоматически выравнивать длину ветвей канатов и удерживать скафандр с обучаемым 1 на весу даже в случае обрыва одной из ветвей канатной передачи. К нижнему блоку 24 подключен корпус датчика усилия 11, с которым соединен скафандр с обучаемым 1. К скафандру с обучаемым 1 подведен жгут из трубопроводов и электрических кабелей 26 с помощью нескольких пассивных тележек 27, которые позволяют удерживать жгут в подвешенном состоянии на раме 28 при горизонтальных перемещениях скафандра с обучаемым 1. Запасовка канатов канатной передачи 21 с помощью направляющих блоков 22, 23 и 24 осуществляется таким образом, чтобы при перемещении скафандра с обучаемым 1 в горизонтальной плоскости не изменялась высота его подвеса.
Верхние направляющие блоки 23 подвешены к каретке 29, относящейся к системе горизонтального перемещения скафандра с обучаемым 1. Каретка 29 перемещается по мосту 30 с помощью четырех опор 31 на воздушной пленке. Угловые перемещения мост 30 совершает с помощью узла поворота 32. При этом мост 30 с помощью четырех опор 33 на воздушной пленке опирается на стойки 34 с платформами 35. Подвод воздуха к опорам 31 и 33 на воздушной пленке осуществляется по шлангам питания (на фиг.2 не показаны).
Первый блок коррекции 15 легко реализуется на базе микроконтроллера небольшой вычислительной мощности, содержащего таймер, необходимые внутренние и внешние устройства ввода и вывода аналоговых (двухканальный АЦП, ЦАП) и дискретных сигналов и работающего по программе, структурная схема которой приведена на фиг.3.
При пуске программы в блоке 1 осуществляется первоначальная установка в нулевое состояние и вывод на соответствующие выходы первого блока коррекции 15 сигналов коррекции К1, признака окончания коррекции ПОК и признака отказа датчика усилия ПОД. Затем в блоках 2 и 3 организовано сканирование сигнала КЗК состояния кнопки запуска коррекции 14, после нажатия которой в блоке 4 проверяется, впервые или повторно нажата данная кнопка. Если кнопка КЗК нажата впервые, то в блоках 5 и 6 осуществляется ввод (через соответствующий канал АЦП) и проверка на допустимые пределы изменения сигнала F от датчика усилия 11. Если датчик усилия 11 вышел из строя, то в блоке 10 признаку отказа датчика усилия ПОД присваивается значение логической единицы, и он выводится на индикатор отказа датчика усилия 5. При нормальной работе датчика усилия в блоках 7 и 8 организуется цикл запуска и ожидания срабатывания таймера. После отработки таймером требуемого периода времени в блоках 11 и 12 выполняется ввод (через соответствующий канал АЦП) и проверка на нулевое состояние сигнала от блока выделения разности усилий 12 ΔF. Если сигнал ΔF не равен нулю, то в блоке 13 проверяется его знак, в зависимости от состояния которого осуществляется переход к одному из блоков модификации сигнала коррекции К1: к блоку 14 - при отрицательном знаке ΔF и к блоку 17 - при положительном знаке ΔF. Модификация сигнала (кода) коррекции К1 выполняется на одну единицу дискретности выходного ЦАП, через который в блоке 15 осуществляется вывод сигнала коррекции К1 на второй выход первого блока коррекции 15. На этом цикл модификации сигнала коррекции К1, реализуемый блоками 5-15 и 17, завершается, и программа переходит к его началу (к блоку 5) и повторению цикла модификации сигнала коррекции К1 до тех пор, пока сигнал ΔF не станет равным нулю, что является признаком успешного завершения процесса, выполняемого первым блоком коррекции 15. В процессе коррекции происходит постепенное нарастание амплитуды сигнала коррекции К1. Равенство нулю сигнала ΔF обнаруживается в блоке 12, после чего выполняется переход к блоку 16, в котором признаку окончания коррекции ПОК присваивается значение логической единицы, и он выводится на индикатор нуля 4. После этого программа переходит к сканированию состояния кнопки запуска коррекции (к блоку 2), при повторном нажатии которой первый блок коррекции 15 перезапускается с предварительным обнулением в блоке 9 сигналов ПОК и ПОД. Этим обеспечивается возможность коррекции обезвешивания в процессе тренировки обучаемого, причем подбором периода запуска таймера обусловливается плавность движения скафандра с обучаемым 1.
Второй блок коррекции 18 так же легко реализуется на базе микроконтроллера небольшой вычислительной мощности, содержащего необходимые устройства ввода и вывода аналоговых (АЦП, ЦАП) и дискретных сигналов и работающего по программе, структурная схема которой приведена на фиг.4 и фиг.5.
Алгоритм программы ориентирован на работу с датчиком положения 3, формирующим на своих выходах два сигнала: последовательность импульсов ИДП, число которых пропорционально величине перемещения скафандра с обучаемым 1 по вертикали, и признака направления перемещения СНП.
При пуске второго блока коррекции 18 в блоке 1 программы осуществляется обнуление сигнала коррекции К2, суммы числителей К2Σ и инициализация приращения сигнала коррекции ΔК2, задаваемого в виде отношения целых чисел: числителя СН и знаменателя SN. Затем в блоке 2 осуществляется вывод сигнала коррекции через ЦАП на выход второго блока коррекции 18. В блоках 3 и 4 выполняется проверка поступления от первого блока коррекции 15 признака окончания выполняемой им коррекции ПОК, при наличии которого программа переходит к выполнению предписанного второму блоку коррекции 18 процесса коррекции. При этом в блоках 5 и 6 циклически выполняется ввод через АЦП сигнала скорости V и проверка его абсолютного значения на превышение минимально допустимого уровня Vmin. При обнаружении наличия перемещения программа в блоках 7 и 8 выполняет циклическую проверку поступления от датчика положения 3 импульса перемещения ИПД, при появлении которого в блоке 9 выполняется ввод сигнала направления перемещения СНП. В зависимости от знака сигнала СНП в блоке 10 выполняется переход к одному из блоков 11 или 14 вычисления приращения сигнала коррекции (-ΔК2) или (+ΔК2). Затем в блоке 12 выполняется модификация сигнала коррекции К2 на величину ΔК2 с учетом ее знака. В блоке 13 осуществляется вывод сигнала коррекции через ЦАП на выход второго блока коррекции 18, после чего программа переходит к началу цикла коррекции, ожидая появления следующего импульса перемещения ИДП. При этом программа проходит блоки 3-6, выполняющие условия продолжения цикла коррекции: наличие сигнала ПОК и превышение минимального уровня сигнала скорости V. Учет минимального уровня сигнала скорости Vmin связан с тем, что скафандр с обучаемым 1 находится на гибком подвесе, которому присущи микроколебания по вертикали, требующие введения зоны нечувствительности по скорости шириной ± Vmin.
В общем случае величина приращения сигнала коррекции ±ΔК2 на каждый импульс перемещения является вещественной величиной, а на ЦАП требуется выдавать целочисленные значения. Поэтому вычисление величины ±ΔК2 осуществляется по подпрограмме, алгоритм которой для вычисления значения +ΔК2 приведен на фиг.5,а (алгоритм работы блока 14). Результатом работы этого алгоритма является формирование по каждому импульсу перемещения по вертикали целочисленных значений приращения сигнала коррекции +ΔК2 при задании ΔК2 в виде отношения целых чисел: числителя СН и знаменателя SN.
Вычисление начинается в блоке 15 с увеличения текущего значения накопленной суммы числителей К2ΣТ на величину числителя СН при первоначально установленной нулевой накопленной суммы числителей К2Σ. Затем в блоке 16 вычисляется целочисленное приращение ΔК2 как результат округления до меньшего целого числа частного от деления текущего значения накопленной суммы числителей К2ΣТ на знаменатель SN. После этого в блоке 17 выполняется определение оставшейся накопленной суммы числителей К2Σ с учетом выданного целочисленного значения ΔК2. Последовательность описанных действий повторяется по каждому импульсу, поступившему от датчика положения 3, с сохранением предыдущих значений величин
К2ΣТ и К2Σ.
Работа приведенного на фиг.5,а алгоритма иллюстрируется таблицей на фиг.5,б, составленной для примера вычисления ΔК2=0,45 (СН=9, SN=20) по первым семи импульсам от датчика перемещения 3. Как видно из указанной таблицы, формирование целочисленных значений ΔК2 осуществляется равномерно без накопления ошибки округления.
При изменении направления движения скафандра с обучаемым 1 по вертикали на противоположное вычисление значения (-ΔК2) осуществляется аналогично в блоке 11, алгоритм которого отличается от алгоритма, приведенного на фиг.5,а, знаком (-) в блоке 15. При этом потери информации не происходит, а алгоритм работоспособен и при вещественных значениях величины ΔК2, превышающих единицу.
В качестве микроконтроллера, на базе которого могут быть реализованы первый 15 и второй 18 блоки коррекции, возможно использование микроконтроллера фирмы Motorola типа MC68HC908GP32, имеющего встроенный в него модуль восьмиразрядного восьмиканального АЦП. Совместно с микроконтроллером возможно использование двенадцатиразрядного ЦАП типа DAC813. Превышение разрядности ЦАП над разрядностью АЦП обеспечивает уменьшение при коррекции величины ΔF до нулевого значения с погрешностью, меньшей разрешающей способности АЦП.
В качестве датчика положения 3 могут быть использованы резольвер совместно с измерительным преобразователем на базе микросхем типа AD2S90 и AD2S99.
В качестве датчика усилия 11 может быть использован тензодатчик типа С2-500 (Тензо-М).
В составе устройства регулирования момента 8 возможно использование транзисторного управляемого преобразователя напряжения типа ЭШИМ-1.
Макет системы управления вертикальным перемещением обучаемого на тренажере выхода в космос прошел практическую апробацию на кафедре "Электропривод и автоматика" Южно-Россицского государственного технического университета (г. Новочеркасск), что подтвердило не только повышение точности управления вертикальным перемещением скафандра с обучаемым 1, но и возможность вынесения кнопки запуска коррекции 14, индикатора нуля 4 и индикатора отказа датчика усилия 5 в соседнее с тренажером помещение с размещением их на пульте дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| УЧЕБНЫЙ ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ К ВНУТРИКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ | 2020 |
|
RU2738489C1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| Тренажер оператора систем управления | 1981 |
|
SU987655A1 |
| Устройство для тренировки человека движению | 1979 |
|
SU1023384A1 |
| Устройство для автоматического нагружения конструкций при испытании | 1984 |
|
SU1211635A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
Изобретение относится к области тренажеростроения и может быть использовано для создания тренажера выхода в космос в виде скафандра с человеком, приобретающим навыки работы в открытом космосе. Система содержит скафандр с обучаемым, задатчик веса груза, последовательно соединенные задатчик момента электродвигателя, сумматор, устройство регулирования момента, электродвигатель, передаточное устройство, датчик усилия, блок выделения разности усилий и регулятор усилия. Второй вход блока выделения разности усилий подключен к выходу задатчика веса груза, скафандр с обучаемым соединен с выходом передаточного устройства. Вход индикатора нуля подключен к первому выходу первого блока коррекции, второй выход которого связан с четвертым входом блока выделения разности усилий. Третий вход второго блока коррекции подключен к первому выходу первого блока коррекции. Второй вход первого блока коррекции подключен к выходу датчика усилия. К валу электродвигателя подключены входы датчика скорости и датчика положения. К третьему выходу первого блока коррекции подключен индикатор отказа датчика усилия. Технический результат заключается в повышении точности управления вертикальным перемещением обучаемого на тренажере. 5 ил.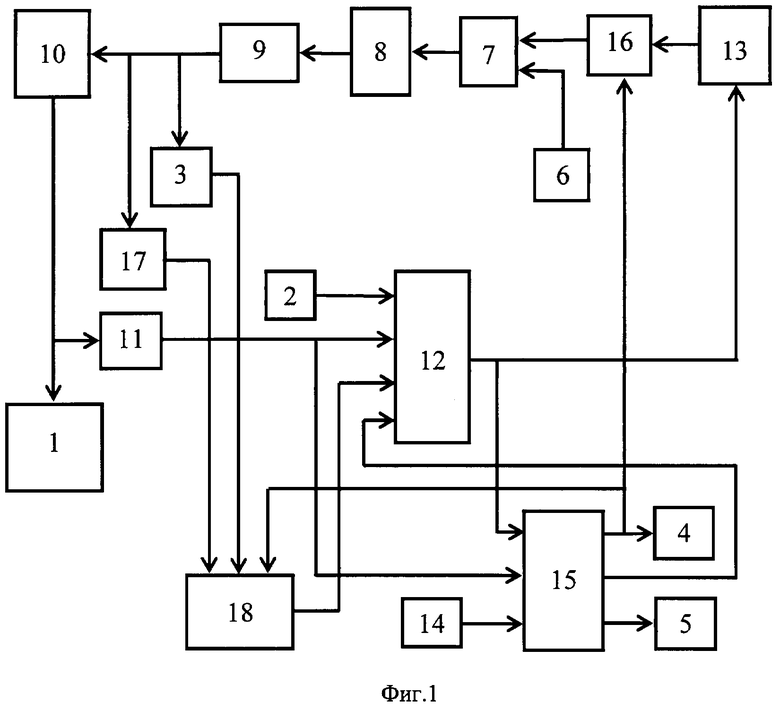
Система управления вертикальным перемещением обучаемого на тренажере выхода в космос, содержащая скафандр с обучаемым, задатчик веса груза, последовательно соединенные задатчик момента электродвигателя, сумматор, устройство регулирования момента, электродвигатель, передаточное устройство, датчик усилия, блок выделения разности усилий и регулятор усилия, второй вход блока выделения разности усилий подключен к выходу задатчика веса груза, а скафандр с обучаемым соединен с выходом передаточного устройства, отличающаяся тем, что в нее дополнительно установлены датчик положения, подключенный к валу электродвигателя, индикатор нуля, индикатор отказа датчика усилия, последовательно соединенные кнопка запуска коррекции, первый блок коррекции и ключ, второй вход которого подключен к выходу регулятора усилия, а выход связан со вторым входом сумматора, а также последовательно соединенные датчик скорости и второй блок коррекции, выход которого соединен с третьим входом блока выделения разности усилий, причем вход индикатора нуля соединен с первым выходом первого блока коррекции, второй выход которого связан с четвертым входом блока выделения разности усилий, выход датчика положения соединен со вторым входом второго блока коррекции, третий вход которого подключен к первому выходу первого блока коррекции, выход блока выделения разности усилий связан со вторым входом первого блока коррекции, к третьему выходу которого подключен индикатор отказа датчика усилия, третий вход первого блока коррекции подключен к выходу датчика усилия, а к валу электродвигателя подключен вход датчика скорости.
| Кравченко О.А., Хализева М.А | |||
| Повышение качества информационного обеспечения силокомпенсационных систем применением фаззи-регулятора | |||
| - Электромеханика, 2003, №5, с.37-41 | |||
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ВЕРТИКАЛЬНО ПЕРЕМЕШАЮЩЕЙСЯ МАЛОЖЕСТКОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2004 |
|
RU2273592C2 |
| Технология сборки и испытаний космических аппаратов./Под общ | |||
| ред | |||
| проф | |||
| И.Т.Белякова и проф | |||
| И.А.Зернова | |||
| - М.: Машиностроение, 1990 | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |

