Изобретение относится к радиотехнике и может быть использовано для определения координат источников радиоизлучений (ИРИ) с борта летательного аппарата (ЛА).
Задача определения координат источников электромагнитного излучения в радиочастотном диапазоне является важной составляющей мониторинга сигналов и позволяет обеспечивать скрытность наблюдения и засечки вследствие отсутствия необходимости генерации зондирующих сигналов из точки мониторинга. Размещение пеленгационных средств на ЛА, и в том числе на беспилотных ЛА, позволяет существенно расширить зону мониторинга и осуществлять превентивное обнаружение и определение координат ИРИ.
Известны способ и устройство определения координат ИРИ (Патент РФ №2419106 // Иванов Ю.В., Наумов А.С., Саяпин В.Н., Смирнов П.Л., Соломатин А.И., Терентьев А.В., Царик О.В., Шеплов A.M. - G01S 13/46. опубл. 20.06.11), в котором на ЛА размещена пеленгационная антенна, измеритель угловой ориентации ЛА, измеритель местоположения ЛА, преобразователь угловых координат линии пеленга в географические координаты ИРИ. К недостаткам известного способа относится низкая селективность ИРИ при наличии в створе линии пеленга других ИРИ с близкими параметрами, например псевдоисточников в виде отражателей радиоизлучения истинного источника, что связано с недостаточным объемом обрабатываемой информации.
Наиболее близким по технической сущности и принятым за прототип является способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА (Патент РФ №2432580 // Басенников А.В., Гузенко О.Б., Дикарев А.С., Изюмов В.А., Скобелкин В.Н. - G01S 1/08, опубл. 27.10.2011). В данном способе определяют линии пеленгов, производят регистрацию и весовую обработку полученных данных, производят операцию формирования вспомогательных плоскостей, ортогональных плоскости пеленгационной антенны и проходящих через каждую полученную линию пеленга, определяют линии положения ИРИ как пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисляют координаты ИРИ как точки пересечения линий положения ИРИ. Основным недостатком прототипа является низкая селективность вычисления координат ИРИ, связанная с дефицитом обрабатываемой информации.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение селективности ИРИ и определения его координат при пеленгации с борта ЛА.
Поставленная задача решается за счет достижения технического результата, заключающегося в обеспечении достоверности распознавания цели и уменьшении вероятности ложной тревоги.
Данный технический результат достигается тем, что в известном способе определения координат ИРИ с борта ЛА, включающем прием радиосигналов бортовой пеленгационной антенной, частотную селекцию, определение линий пеленгов с помощью пеленгационной антенны, регистрацию и обработку полученных данных, формирование вспомогательных плоскостей, ортогональных плоскости пеленгационной антенны и проходящих через каждую полученную линию пеленга, определение линий положения ИРИ как линий пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисления координат ИРИ как точки пересечения линий положения ИРИ, регистрацию полученных данных производят периодически отсчетами, в каждом отсчете измеряют текущие значения каждого из n параметров ИРИ 


где 
определяют среднее значение n-го параметра ИРИ по результатам m измерений путем вычисления величины 

определяют текущую линию пеленга как линию пересечения текущей вспомогательной плоскости с поверхностью Земли и при вычислении координат учитывают исключительно те значения координат пересечения линий положения ИРИ, которые попадают в поле допуска, зафиксированного относительно полученных по результатам предыдущего отсчета координат, после чего предыдущие значения координат ИРИ заменяют на вновь вычисленные.
Промежуток времени τ между отсчетами связан с временной разрешающей способностью пеленгатора и удовлетворяет соотношению τ>ξr/v, где ξ - угол (рад.) с вершиной в ИРИ и сторонами, проходящими в точках нахождения ЛА при последовательных отсчетах, r - ориентировочное расстояние от ЛА до ИРИ, a v - скорость полета ЛА.
Измерение текущих значений параметров ИРИ производят с использованием оконного преобразования Фурье, а их обработку производят с учетом доплеровского смещения спектра.
Сущность изобретения поясняется чертежами.
На фиг.1 представлена функциональная схема устройства определения координат ИРИ, реализующего заявляемый способ.
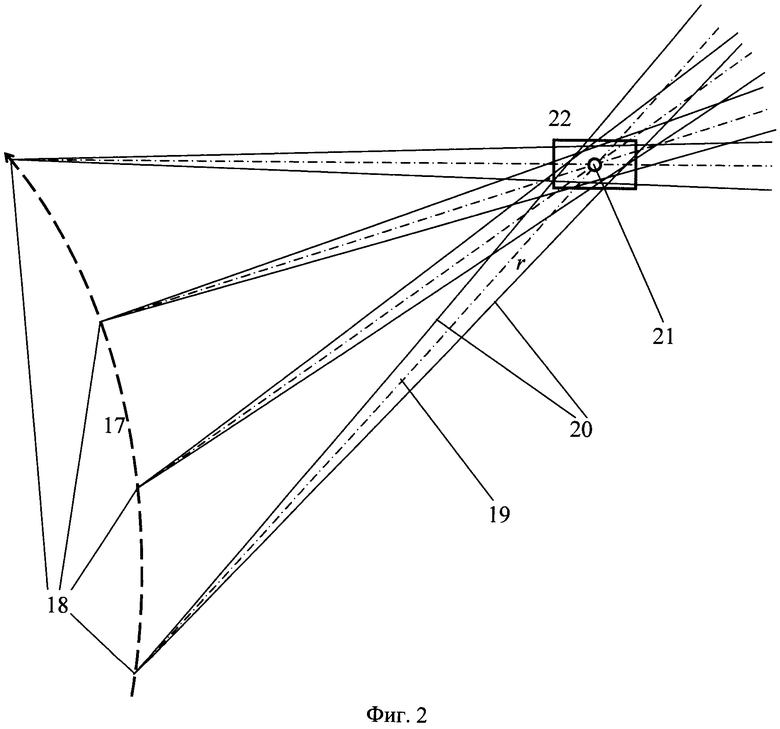
На фиг.2 представлена последовательность определения координат одного ИРИ.
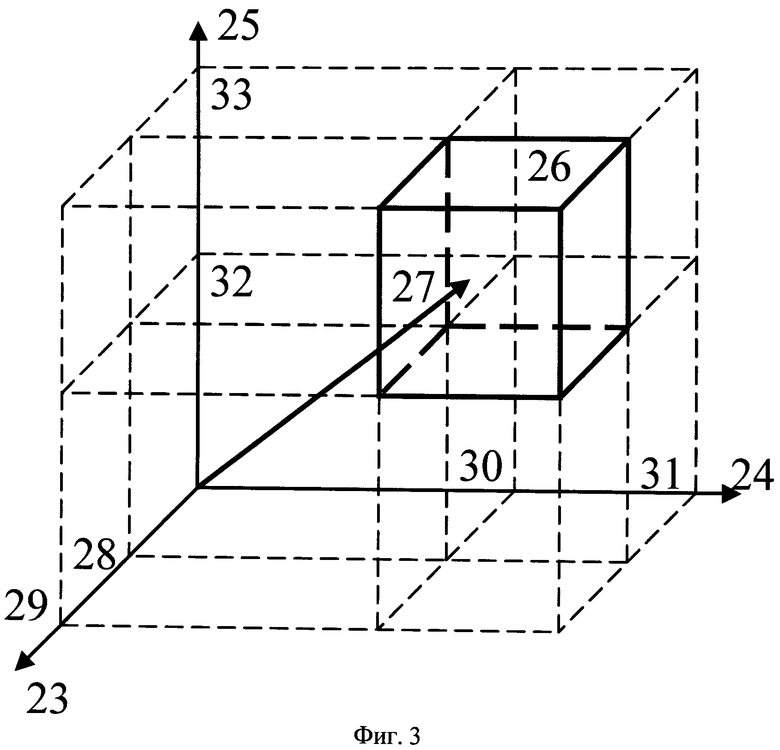
На фиг.3 представлена процедура проверки попадания параметров ИРИ в заданные пределы.
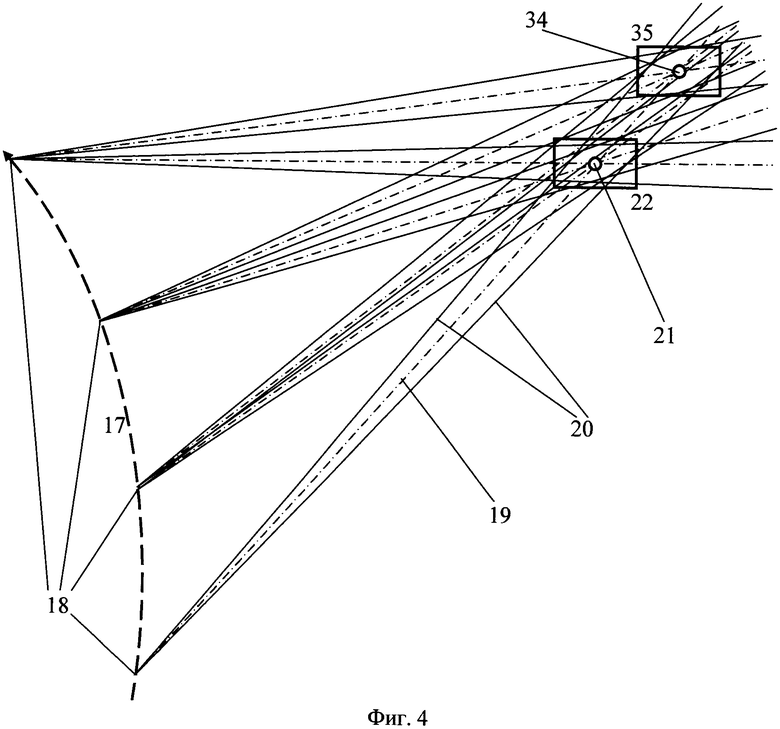
На фиг.4 представлена процедура селекции ИРИ при неперекрывающихся полях допуска в определении координат.
На фиг.5 представлена процедура селекции ИРИ при перекрывающихся полях допуска в определении координат.
На фиг.6 представлена область пеленгации, в Земной и связанной системах координат.
Устройство определения координат ИРИ с борта ЛА (фиг.1), реализующее предлагаемый способ, содержит пеленгационную антенну 1, блок 2 определения параметров движения ЛА; усилитель 3 сигнала; блок 4 определения параметров ИРИ; блок 5 определения направления линии пеленга в связанной системе координат; блок 6 пересчета параметров ИРИ с учетом вектора скорости и доплеровского смещения; блок 7 расчета направления линии пеленга в Земной системе координат; блок 8 проверки попадания параметров ИРИ в поле допуска; блок 9 регистрации параметров и направления линии пеленга в запоминающем устройстве; блок 10 расчета геодезических координат точек пересечения текущей линии пеленга с ранее зарегистрированными линиями пеленга; блок 11 уточнения параметров ИРИ; блок 12 расчета поля допуска параметров ИРИ; блок 13 проверки попадания геодезических координат точек пересечения линии пеленгации ИРИ с ранее зарегистрированными линиями пеленгации в поле допуска; блок 14 усреднения геодезических координат ИРИ; блок 15 хранения усредненного значения координат ИРИ; блок 16 нанесения ИРИ на цифровую карту местности.
Последовательность определения координат одного ИРИ (фиг.2) включает траекторию 17 полета ЛА, точки 18 отсчетов, линии 19 пеленга, верхнюю и нижнюю границы 20 поля допуска линии пеленга, источник 21 радиоизлучения (21 ИРИ), поле 22 допуска координат ИРИ.
Процедура проверки попадания параметров ИРИ в заданные пределы (фиг.3) включает ортогональное пространство параметров радиопортрета ИРИ, состоящее из первого параметра 23 (например, частоты электромагнитного излучения ƒ), второго параметра 24 (например, периода следования импульсов Т), третьего и последующего параметров 25, область 26 допустимых значений параметров, вектор 27 текущих значений параметров, нижний 28 и верхний 29 пределы параметра 23 (например, ƒmin и ƒmax), нижний 30 и верхний 31 пределы параметра 24 (например, Tmin и Tmax), нижний 32 и верхний 33 пределы параметра 25.
Процедура селекции ИРИ при неперекрывающихся полях допуска в определении координат (фиг.4) включает траекторию 17 полета ЛА, точки 18 отсчетов, линии 19 пеленга, верхнюю и нижнюю границы 20 поля допуска линии пеленга, первый источник 21 радиоизлучения, поле 22 допуска координат первого ИРИ, второй источник 34 радиоизлучения, поле 35 допуска координат второго ИРИ.
Процедура селекции ИРИ при перекрывающихся полях допуска в определении координат (фиг.5) включает траекторию 17 полета ЛА, точки 18 отсчетов, линии 19 пеленга, верхнюю и нижнюю границы 20 поля допуска линии пеленга, первый источник 21 радиоизлучения, поле 22 допуска координат первого ИРИ, второй источник 34 радиоизлучения, поле 35 допуска координат второго ИРИ; ортогональное пространство параметров радиопортрета ИРИ, состоящее из первого параметра 23, второго параметра 24, третьего и последующего параметров 25, область 26 допустимых значений параметров первого ИРИ, вектор 27 текущих значений параметров первого ИРИ, область 36 допустимых значений параметров второго ИРИ, вектор 37 текущих значений параметров второго ИРИ.
Область пеленгации в Земной и связанной системах координат (фиг.6) включает плоскость 38, параллельную плоскости горизонтальной симметрии x'O'y'z' ЛА, прямую 39 пересечения плоскости 38 и плоскости пеленгации 40, конус 41, ограничивающий поле зрения пеленгационной антенны в нижней полусфере; прямую 42 пересечения плоскости пеленгации 40 с конусом 41, ограничивающим поле зрения пеленгационной антенны в нижней полусфере; конус 43, ограничивающий поле зрения пеленгационной антенны в верхней полусфере; прямую 44 пересечения плоскости пеленгации 40 с конусом 43, ограничивающим поле зрения пеленгационной антенны в верхней полусфере.
Устройство определения координат ИРИ, реализующее предполагаемый способ (фиг.1), функционирует следующим образом.
Принимаемый сигнал от ИРИ, или множества ИРИ поступает на пеленгационную антенну 1, которая может быть исполнена, например, в соответствии с описанием к патенту РФ №2027261, Ильичева Н.М., Паленов А.Н. Пеленгационная антенная система G01Q 21/24. Сигнал с пеленгационной антенны 1 усиливается усилителем 3 и подается на блок 4 определения параметров ИРИ и блок 5 определения направления линии пеленга в связанной системе координат.
В блоке 4 определения параметров ИРИ над принимаемым сигналом выполняется оконное преобразование Фурье по зависимости

где t - текущее время; τ - вспомогательный аргумент, имеющий размерность времени и введенный для того, чтобы отличить текущее время t от переменной интегрирования τ; u(t) - преобразуемый сигнал в сигнальной области; ехр(-iωτ) - ядро преобразования; ω - круговая частота; w - ширина оконного преобразования Фурье; U(ω,t) - текущий спектр Фурье; ℑ[u(t)] - оператор преобразования; 
По текущему спектру Фурье определяются следующие параметры ИРИ:
частота несущей излучаемого сигнала (определяется по глобальному максимуму частотной характеристики);
наличие модуляции сигнала (определяется по подъему частотной характеристики на более низких частотах, чем у несущей частоты);
период следования импульсов (определяется по характерному спектру, имеющему вид sin(ω/Ω)/ω);
характер шумов (определяются по виду функции, которой аппроксимируется частотный спектр на верхних частотах).
Могут быть определены и другие параметры ИРИ (см. Использование радиоспектра / Перевод под редакцией М.С.Гуревича. - М.: Связь, 1969. - 272 с.; Свистов В.И. Радиолокационные сигналы и их обработка. - М.: Сов. радио, 1977. - 448 с.).
Блок 5 выбора направления линии пеленга в связанной системе координат создает угол φ между вертикальной плоскостью пеленгации и плоскостью вертикальной симметрии ЛА. Связанная система координат x'O'y'z' (фиг.6) сформирована таким образом, что ее центр О' совпадает с центром масс ЛА, ось О'х' лежит на пересечении вертикальной продольной плоскости симметрии и горизонтальной плоскости, проходящей через центр масс корпуса ЛА, стоящего неподвижно на ровной горизонтальной поверхности. Ось O'z' лежит в вертикальной продольной плоскости симметрии цели, перпендикулярна оси О'х' и направлена вверх, ось O'y' перпендикулярна осям О'х' и O'z' и дополняет систему до правой системы координат. Изначально пеленгационная антенна 1 сориентирована в плоскости x'O'z'. Нормаль к указанной плоскости имеет вид

Центр пеленгационной антенны имеет следующие связанные координаты относительно центра масс:





Плоскость пеленгации задается блоком 5 задания направления плоскости пеленга в связанной системе координат. Указанная плоскость повернута относительно плоскости x'O'z' на угол φ. Нормаль к плоскости пеленгации имеет в связанной системе координат направляющие косинусы

В процессе пеленгации ЛА (на фиг.1 не показан) перемещается по траектории 17 (фиг.2). При этом в каждый момент времени блок 2 определения параметров движения измеряет геодезические координаты (xc, yc) центра масс, высоту zc центра масс над уровнем моря, вектор (νx, νy, νz) курсовой скорости, а также углы: курса ψ, тангажа ϑ и крена γ. Все перечисленные параметры непрерывно изменяются в процессе полета и могут быть измерены:
геодезические координаты (xc, yc) с помощью глобальной навигационной спутниковой системы (см. Спутниковые радионавигационные системы / Под ред. В.С.Шибшаевича. - М.: Радио и связь, 1993. - С.261-275. а также описание прототипа);
высота zc центра масс над уровнем моря с помощью высотометра (см. Волкоедов А.П., Паленый Э.Г. Оборудование самолетов. - М.: Машиностроение, 1980; Шиллингер В.Н. Высотометр, А.С. СССР №105471);
вектор курсовой скорости (νх, νy, νz) с помощью измерителя скорости (Помыкаев М.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. - М.: 1983, Воздушная навигация: Справочник. - М.: 1988.);
углы курса ψ, тангажа ϑ и крена γ - с помощью бортовой инерциальной навигационной системы (Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982; Бромберг П.В. Теория инерциальных систем навигации. - М.: Наука, 1979. - 291 с.).
Информация с блока 2 определения параметров движения передается в блок 7 расчета направления линии пеленга в Земной системе координат, в котором:
рассчитывается местоположение центра пеленгационной антенны по зависимости

если антенна размещена в вертикальной плоскости симметрии летательного ЛА, или

если антенна размещена в пилоне, вынесенном на крыло, где

рассчитываются направляющие косинусы вектора, ортогонального плоскости пеленгации, по зависимости

где αx - угол между осью Ox Земной системы координат и вектором, ортогональным плоскости пеленгации; αy - угол между осью Oy Земной системы координат и вектором, ортогональным плоскости пеленгации; αz - угол между осью Oz Земной системы координат и вектором, ортогональным плоскости пеленгации;
определяется линия пеленга на поверхности Земли через решение системы уравнений

где z=h(x,y) - уравнение, определяющее рельеф местности в зоне пеленгации, например, получаемое из цифровой карты местности; cosαx(х-xa)+cosαy(у-ya)+cosαz(z-za)=0 - уравнение плоскости пеленгации в Земной системе координат, определяемое по результатам измерения углов курса ψ, тангажа ϑ и крена γ с помощью блока 2 определения параметров движения ЛА.
Параметры ИРИ, рассчитанные блоком 4 определения параметров ИРИ, при движении ЛА относительно ИРИ, изменяются за счет эффекта Доплера. Для электромагнитного излучения доплеровское смещение частоты определяется соотношением
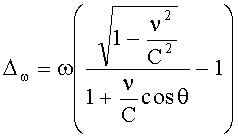
где ω - частота, измеренная при пеленгационной антенне, неподвижной относительно ИРИ; С - скорость света в вакууме; ν - модуль вектора курсовой скорости ЛА.
Модуль и направляющие косинусы вектора курсовой скорости ЛА, измеряемой блоком 2 определения параметров движения ЛА, вычисляются по формуле

где ψx - угол между вектором курсовой скорости и осью Ox Земной системы координат; ψy - угол между вектором курсовой скорости и осью Oy Земной системы координат; ψz - угол между вектором курсовой скорости и осью Oz Земной системы координат; ν=(νx, νy, νz) - вектор курсовой скорости, измеренный блоком 2 определения параметров движения ЛА.
Для определения доплеровского смещения спектра вычисляются три параметра ориентации пеленгационной антенны 1:
угол θ1 между вектором скорости ν и прямой 39, лежащей на пересечении плоскости 38, параллельной плоскости горизонтальной симметрии x'O'y'z' ЛА и плоскости 40 пеленгации;
угол θ2 между вектором скорости ν и прямой 42, лежащей на пересечении конуса 41 ограничивающего поле зрения пеленгационной антенны в нижней полусфере и плоскости 40 пеленгации;
угол θ3 между вектором скорости ν и прямой 44, лежащей на пересечении конуса 43 ограничивающего поле зрения пеленгационной антенны в верхней полусфере и плоскости 40 пеленгации.
Пространственное положение прямой 39 пересечения плоскости 38 и плоскости 40 пеленгации определяется направляющими косинусами, имеющими в земной системе координат вид

Пространственное положение прямой 42 пересечения плоскости конуса 41, ограничивающего поле зрения пеленгационной антенны 1 в нижней полусфере и плоскости 40 пеленгации определяется направляющими косинусами, имеющими в земной системе координат вид

Пространственное положение прямой 44 пересечения плоскости конуса 43, ограничивающего поле зрения пеленгационной антенны 1 в верхней полусфере и плоскости 40 пеленгации определяется направляющими косинусами, имеющими в земной системе координат вид

Углы между вектором v курсовой скорости и прямыми 39, 42, 44 определяются выражениями:



Можно считать, что смещение частоты лежит в интервале

При пересчете параметров ИРИ в блоке 6 пересчета параметров ИРИ с учетом вектора скорости и доплеровского смещения учитывается центр полученного интервала.
Параметры ИРИ, такие как частота несущей излучаемого сигнала, характер модулирующего сигнала, период следования импульсов, характер шумов и другие, формируют вектор 27 текущих значений параметров ИРИ в ортогональном пространстве 23, 24, 25 параметров. Далее проверяется попадание вектора 27 текущих значений параметров ИРИ в область 26 допустимых значений параметров, которая строится вокруг усредненного значения вектора параметров. При попадании вектора 27 текущих значений параметров ИРИ внутрь области 26 допустимых значений параметров, определяемой в соответствии с неравенствами
anmin≤an≤anmax,
где an - n-й параметр ИРИ (частота несущей излучаемого сигнала, характер модулирующего сигнала, период следования импульсов, характер шумов и другие); anmin - нижняя граница n-го параметра (на фиг.3 обозначена как 28, 30, 32); anmax - верхняя граница n-го параметра (на фиг.3 обозначена как 29, 31, 33), среднее значение параметров ИРИ, количество измерений и направление линии пеленга запоминаются в блоке 9 регистрации параметров и направления линии пеленга, дополняя массив параметров текущего анализируемого ИРИ.
При занесении параметров ИРИ и направления линии пеленга в первый раз проверка на попадание в поле допуска не производится, а формируется новый массив параметров текущего анализируемого ИРИ. Если параметры ИРИ не попадают в поле допуска, то также формируется новый массив параметров текущего анализируемого ИРИ.
Из блока 9 регистрации параметров и направления линии пеленга в запоминающем устройстве направление линии пеленга передается в блок 10 расчета геодезических координат точек пересечения текущей линии пеленга с ранее зарегистрированными линиями пеленга, а параметры ИРИ передаются в блок 11 уточнения параметров ИРИ.
В блоке 11 уточнения параметров ИРИ параметры вычисляются по формуле
где 

Далее по уточненным параметрам ИРИ в блоке 12 расчета поля допуска параметров ИРИ уточняются нижние (28, 30, 32) и верхние (29, 31, 33) границы параметров по зависимостям


где ∆n - суммарное поле допуска на n-й параметр.
Новые значения нижних (28, 30, 32) и верхних (29, 31, 33) границ параметров передаются в блок 9 регистрации параметров и направления линии пеленга в запоминающем устройстве.
В блоке 10 расчета геодезических координат точек пересечения текущей линии пеленга с ранее зарегистрированными в блоке 9 регистрации параметров и направления линии пеленга в запоминающем устройстве решается множество систем уравнений:

где 





Решение каждой системы уравнений дает координаты 
Nm=Nm-1+(m-1).
Полученные таким образом координаты проверяются на попадание в поле допуска с помощью блока 13 проверки попадания геодезических координат точек пересечения линии пеленгации ИРИ с ранее зарегистрированными линиями пеленгации в поле допуска. В блоке 13 каждая вновь вычисленная координата 


где 

Допуски ∆x, ∆y на значения координат xs и ys определяются по угловому разрешению ∆a пеленгационной антенны 1, формируемому относительно линии 19 пеленга, верхней и нижней границами 20 поля допуска линии пеленга, и текущей дальности r от ЛА до ИРИ:

В случае, если после проверки в блоке 13 проверки попадания геодезических координат точек пересечения линии пеленгации ИРИ с ранее зарегистрированными линиями пеленгации в поле допуска окажется, что координаты 




Уточненные значения усредненных координат 

В том случае, если после проверки в блоке 13 проверки попадания геодезических координат точек пересечения линии пеленгации ИРИ с ранее зарегистрированными линиями пеленгации в поле допуска окажется, что координаты
Определение и усреднение координат
В случае, если ИРИ 21 и ИРИ 34 при наблюдении из некоторой точки траектории расположены в одной плоскости пеленгации, но имеют координаты, с неперекрывающимися полями допуска 22 и 35 (фиг.4), при перемещении ЛА по траектории возникает момент, когда координаты одного из ИРИ, например 34, выходят за поле допуска 22 ИРИ 21. В этом случае, за счет формирования нового массива, ИРИ 34 также наносится на цифровую карту местности.
В случае, если ИРИ 21 и ИРИ 34 при наблюдении из некоторой точки траектории расположены в одной плоскости пеленгации, и имеют координаты, с перекрывающимися полями допуска 22 и 35 (фиг.5), разделение ИРИ 21 и 34 при перемещении ЛА по траектории может быть осуществлено по неперекрывающимся областям 26 и 36, сформированным вокруг векторов параметров 27 и 37 ИРИ 21 и 34, соответственно. В этом случае, за счет формирования нового массива, ИРИ 34 также наносится на цифровую карту местности.
Таким образом, предлагаемый способ легко реализуем на бортовой ЭВМ ЛА средней производительности и позволяет существенно повысить селективность ИРИ при наличии в створе линии пеленга других ИРИ с близкими параметрами, что существенно повышает эффективность пеленгации, в частности вероятность пропуска цели уменьшается за счет формирования новых массивов в тех случаях, когда параметры ИРИ выходят за пределы поля допуска, а вероятность ложной тревоги понижается за счет многократной пеленгации с разных точек траектории и усреднения параметров и координат ИРИ.


Изобретение относится к радиотехнике и может использоваться для определения местоположения источника радиоизлучения (ИРИ). Достигаемый технический результат - повышение селективности ИРИ. Указанный результат достигается за счет многократной пеленгации и фиксации параметров радиоизлучения с разных точек траектории полета, сравнения текущих значений этих параметров с их значениями от каждого предыдущего отсчета и регистрации полученных данных только в случае совпадения в допустимых пределах сравниваемых значений, что обеспечивает высокую достоверность идентификации истинного ИРИ и снижает вероятность ложных тревог, учитывают также исключительно те значения координат, которые попадают в поле допуска, зафиксированного относительно полученных по результатам предыдущего отсчета. 2 з.п. ф-лы, 6 ил.
1. Способ определения координат источника радиоизлучения с борта летательного аппарата, включающий прием радиосигналов бортовой пеленгационной антенной, частотную селекцию, определение линий пеленгов с помощью пеленгационной антенны, регистрацию и обработку полученных данных, формирование вспомогательных плоскостей, ортогональных плоскости пеленгационной антенны и проходящих через каждую полученную линию пеленга, определение линий положения источника радиоизлучения как линий пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисление координат источника радиоизлучения как точки пересечения линий положения источника радиоизлучения, отличающийся тем, что регистрацию полученных данных производят периодически отсчетами, в каждом отсчете измеряют текущие значения каждого из n параметров источника радиоизлучения
где
определяют среднее значение n-го параметра источника радиоизлучения по результатам m измерений путем вычисления величины
определяют текущую линию пеленга как линию пересечения текущей вспомогательной плоскости с поверхностью Земли и при вычислении координат учитывают исключительно те значения координат пересечения линий положения источника радиоизлучения, которые попадают в поле допуска, зафиксированного относительно полученных по результатам предыдущего отсчета координат, после чего предыдущие значения координат источника радиоизлучения заменяют на вновь вычисленные.
2. Способ определения координат источника радиоизлучения с борта летательного аппарата по п.1, отличающийся тем, что промежуток времени τ между отсчетами связан с временной разрешающей способностью пеленгатора и удовлетворяет соотношению τ>ξr/v, где ξ - угол (рад.) с вершиной в источнике радиоизлучения и сторонами, проходящими в точках нахождения летательного аппарата при последовательных отсчетах, r - ориентировочное расстояние от летательного аппарата до источника радиоизлучения, a ν - скорость полета летательного аппарата.
3. Способ определения координат источника радиоизлучения с борта летательного аппарата по п.1, отличающийся тем, что измерение текущих значений параметров источника радиоизлучения производят с использованием оконного преобразования Фурье, а их обработку производят с учетом доплеровского смещения спектра.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434239C1 |
| US 7777676 B2, 07.08.2010 | |||
| WO 2010136409 A1, 02.12.2010 | |||
| US6469657 B1, 22.10.2002 | |||

