Различные примеры осуществления настоящего изобретения относятся к временно устанавливаемым медицинским устройствам. В частности, примеры осуществления изобретения касаются временно устанавливаемых медицинских устройств, установочных приспособлений для них и механизмов крепления, предназначенных для использования с указанными устройствами. В описании изобретения представлен ряд временно устанавливаемых медицинских устройств, а также установочных приспособлений для крепления указанных медицинских устройств к тканям тела человека.
Введение различных временно устанавливаемых медицинских устройств, установочных приспособлений и механизмов крепления в тело пациента желательно выполнять с использованием малоинвазивных хирургических процедур. Процесс введения и размещения указанных временно устанавливаемых медицинских устройств, установочных приспособлений и механизмов крепления в теле пациента должен быть быстрым, простым, эффективным и обратимым.
Для введения медицинских устройств в тело пациента и обозрения анатомических структур используются малоинвазивные эндоскопические и лапароскопические процедуры. Для обозрения анатомической области, требующей лечения (например, зоны операционного действия), врач-клиницист (например, хирург) может ввести в тело пациента жесткий или гибкий эндоскоп. С целью выполнения ключевых хирургических манипуляций (КХМ) врач-клиницист может также ввести хирургические инструменты через один или большее число рабочих каналов эндоскопа. Типичное изображение, полученное с использованием эндоскопа, отличается от изображения, полученного при помощи лапароскопа. Для представления изображения зоны операционного действия в эндоскопе используется камера, обеспечивающая увеличение угла обзора. Таким образом, эндоскоп может работать на более близком рабочем расстоянии от зоны операционного действия, чем лапароскоп. Поскольку камера является составной частью эндоскопа, в процессе проведения процедуры необходимо, чтобы врач-клиницист обеспечил приближение наконечника эндоскопа к зоне операционного действия. Это исключает получение «стадионного режима» изображения операционного поля, вследствие чего применение эндоскопа является предпочтительным и привлекает многих врачей-клиницистов. Кроме того, если все устройства размещены на одной оси, то возможности врача-клинициста, касающиеся координации действий в отношении камеры и хирургических инструментов, ограничиваются. Далее введение камеры и хирургических инструментов через рабочие каналы эндоскопа приводит к ограничению его гибкости. При этом для достижения зоны операционного действия с использованием гибкого эндоскопа врачу-клиницисту часто приходится проводить эндоскоп извилистым маршрутом, в связи с чем ориентация эндоскопа может не обеспечивать получение ожидаемого изображения рабочей зоны. Коррекция ориентации при выполнении операций снаружи внутренних полостей тела пациента может оказаться очень сложным процессом. Наконец, камера и связанные с ней кабели занимают полезное пространство эндоскопа, которое можно использовать для размещения более сложных и/или имеющих большие размеры терапевтических или хирургических медицинских устройств.
В связи с этим существует потребность применения совместно с эндоскопом временно устанавливаемых медицинских устройств, установочных приспособлений для них и механизмов крепления. Кроме того, требуются также механизмы крепления, которые могут использоваться для крепления временно устанавливаемых медицинских устройств и установочных приспособлений к элементам внутренней анатомической структуры пациента.
Согласно изобретению временно устанавливаемое устройство для хирургических целей содержит:
временно устанавливаемый корпус;
механизм крепления, входящий в состав временно устанавливаемого корпуса и предназначенный для крепления к тканям тела, причем указанный механизм крепления включает в себя по меньшей мере одну крепежную деталь, входящую в состав временно устанавливаемого корпуса и предназначенную для крепления временно устанавливаемого корпуса к тканям тела, причем по меньшей мере одна крепежная деталь может имеет рабочее и нерабочее положение;
установочное приспособление, предназначенное для перемещения по меньшей мере одной крепежной детали из нерабочего положения в рабочее положение; и
устройство распределения питания, размещенное во временно устанавливаемом корпусе, для обеспечения питания содержащихся в устройстве рабочих инструментов.
Устройство может дополнительно содержать:
пусковой элемент;
кнопку блокировки, связанную с пусковым элементом;
причем установочное приспособление предназначено для перемещения указанной по меньшей мере одной крепежной детали из нерабочего положения в рабочее положение в результате приведения в действие пускового элемента в первом направлении; и
причем установочное приспособление предназначено для перемещения указанной по меньшей мере одной крепежной детали из рабочего положения в нерабочее положение посредством воздействия на кнопку блокировки и приведения в действие пускового элемента.
В устройстве предусмотрено множество крепежных деталей, а также камера, размещенная во временно устанавливаемом корпусе.
Предпочтительно камера содержит по меньшей мере один объектив и первое устройство формирования изображения, оптически связанное с указанным по меньшей мере одним объективом.
Камера может включать в себя второй объектив, а также второе устройство формирования изображения, оптически связанное со вторым объективом.
Устройство может содержать зажим для ретракции ткани, размещенный во временно устанавливаемом корпусе, зажим для тканей, размещенный во временно устанавливаемом корпусе, фиксатор эндоскопа, размещенный во временно устанавливаемом корпусе, приспособление для временного создания свободного пространства, размещенное во временно устанавливаемом корпусе, первую и вторую клеммы подачи питания, причем первая и вторая клеммы подачи питания предназначены для подключения к соответствующим первой и второй клеммам аккумуляторной батареи или первая и вторая клеммы подачи питания предназначены для подключения соответствующих первого и второго чрескожных игольчатых электродов, обеспечивающих подключение камеры к источнику питания, размещенному снаружи ткани тела пациента. Первая и вторая клеммы подачи питания могут быть предназначены для подключения соответствующих первого и второго гибких проводников, обеспечивающих подключение камеры к источнику питания, размещенному снаружи ткани тела, посредством пути через естественное отверстие тела пациента.
Устройство согласно изобретению может содержать по меньшей мере один чрескожный проводник, предназначенный для передачи полученных изображений на внешний монитор, гибкий проводник, который выходит из тела пациента через естественное отверстие и обеспечивает передачу полученных изображений на внешний монитор, радиочастотный (РЧ) компонент, связанный с камерой и обеспечивающий беспроводную передачу изображений на внешний монитор при помощи РЧ-излучения, манипулятор, предназначенный для перемещения крепежной детали из нерабочего положения в рабочее положение, где манипулятор обеспечивает перемещение крепежной детали из нерабочего положения в рабочее положение и имеет конструкцию, противодействующую усилию, приложенному к крепежной детали и стремящемуся переместить крепежную деталь в нерабочее положение, когда крепежная деталь находится в рабочем положении, причем указанное усилие может представлять собой вращательное усилие.
Крепежная деталь имеет конструкцию, обеспечивающую поворот вокруг соответствующей оси при перемещении из нерабочего положения в рабочее положение.
Предпочтительно манипулятор имеет конструкцию, обеспечивающую поворот вокруг соответствующей оси, и включает в себя соответствующую поверхность, предназначенную для взаимодействия с крепежной деталью, причем указанная поверхность предназначена для приложения к крепежной детали вращательного усилия при повороте манипулятора в направлении перехода в рабочее положение с целью перемещения крепежной детали из нерабочего положения в рабочее положение. Кроме того, манипулятор имеет конструкцию, противодействующую повороту под воздействием вращательного усилия, приложенного к крепежной детали и стремящегося переместить крепежную деталь в нерабочее положение, когда крепежная деталь находится в рабочем положении.
При этом механизм крепления содержит фиксирующую систему, предназначенную для противодействия непреднамеренному повороту манипулятора.
Манипулятор может иметь конструкцию, обеспечивающую поворот вокруг соответствующей оси, и механизм крепления содержит соответствующий элемент, предназначенный для взаимодействия с крепежной деталью, причем указанный элемент находится на манипуляторе, причем манипулятор, крепежная деталь и указанный элемент имеют такую конструкцию, которая обеспечивает приложение указанным элементом вращательного усилия к каждой соответствующей крепежной детали при повороте манипулятора в направлении перехода в нерабочее положение для перемещения крепежной детали из рабочего положения в нерабочее положение. При этом крепежная деталь и связанный с ней элемент имеют конструкцию, обеспечивающую отсутствие приложения указанным элементом вращательного усилия в направлении перевода крепежной детали в рабочее положение при повороте манипулятора в направлении перемещения крепежной детали в рабочее положение.
Предпочтительно манипулятор выполнен с возможностью поворота и содержит по существу кольцевой элемент, который закреплен с возможностью вращения на временно устанавливаемом корпусе.
Манипулятор может иметь конструкцию, обеспечивающую возможность перемещения крепежной детали посредством воздействия на манипулятор одним или большим числом стандартных хирургических инструментов.
Крепежная деталь включает в себя дистальный конец, предназначенный для прокалывания ткани тела, причем крепежная деталь размещена в соответствующей прорези временно устанавливаемого корпуса, и дистальный конец размещен в соответствующей прорези, когда крепежная деталь находится в нерабочем положении. Предпочтительно крепежная деталь полностью размещена в соответствующей прорези при нахождении крепежной детали в нерабочем положении, где дистальный конец размещен в соответствующей прорези, причем дистальный конец размещен в соответствующей прорези при нахождении крепежной детали в рабочем положении.
Крепежная деталь может содержать дистальный конец, предназначенный для прокалывания ткани тела, причем крепежная деталь размещена в соответствующей прорези и дистальный конец размещен в соответствующей прорези, когда крепежная деталь находится в рабочем положении.
Также предложен способ размещения временно устанавливаемого медицинского устройства согласно изобретению для хирургических целей, включающий:
перемещение временно устанавливаемого медицинского устройства к первому положению на основе просмотра изображений, полученных от камеры, размещенной во временно устанавливаемом медицинском устройстве, при этом камера обеспечивает обзор в прямом направлении введения временно устанавливаемого медицинского устройства;
размещение временно устанавливаемого медицинского устройства и крепежной детали, входящей в состав временно устанавливаемого устройства, в первом положении, находящемся рядом с тканью тела; и
одновременное перемещение крепежной детали из нерабочего положения в рабочее положение для крепления временно устанавливаемого медицинского устройства к ткани тела в первом положении.
Способ может дополнительно включать перемещение крепежной детали из рабочего положения в нерабочее положение для отделения временно устанавливаемого медицинского устройства от ткани тела, а также передачу изображений от камеры во время перемещения временно устанавливаемого медицинского устройства в первое положение и размещение временно устанавливаемого медицинского устройства во втором положении, прилегающем к ткани тела; и одновременное перемещение крепежной детали из нерабочего положения в рабочее положение для крепления временно устанавливаемого медицинского устройства к ткани тела во втором положении.
Размещение временно устанавливаемого медицинского устройства и крепежной детали, входящей в состав временно устанавливаемого устройства, может быть осуществлено через гибкую часть троакара.
Также предложен способ обработки временно устанавливаемых устройств для хирургических целей, включающий:
получение временно устанавливаемого устройства согласно изобретению,
стерилизацию временно устанавливаемого устройства; и
хранение временно устанавливаемого устройства в стерильном контейнере.
ФИГУРЫ
Новые признаки различных примеров осуществления изобретения указаны в приложенной формуле изобретения. Однако примеры осуществления изобретения с точки зрения как конструкции, так и способа функционирования будут более понятными из нижеследующего описания, представленного со ссылками на прилагаемые фигуры, указанные далее.
Фиг.1 - вид в перспективе примера осуществления системы для установки в теле пациента временно устанавливаемого медицинского устройства.
Фиг.2 - вид в перспективе примера осуществления установочной ручки, предназначенной для использования с установочным приспособлением и механизмом крепления, представленными на Фиг.1.
Фиг.3 - вид в перспективе примера осуществления камеры дистанционного обзора, прикрепленной к примеру осуществления установочного приспособления для камеры, находящемуся в положении готовности к использованию.
Фиг.4 - изображение в разобранном виде примера осуществления временно устанавливаемого медицинского устройства и установочного приспособления для него, изображенных на Фиг.3, в расцепленном состоянии после отделения установочного приспособления.
Фиг.5 - вид в перспективе примера осуществления временно устанавливаемого медицинского устройства.
Фиг.6 - вид в разрезе временно устанавливаемого медицинского устройства, представленного на Фиг.5.
Фиг.7 - вид в разрезе временно устанавливаемого медицинского устройства, изображенного на Фиг.5, причем указанное устройство прикреплено к брюшной стенке одной или большим числом крепежных деталей.
Фиг.8 - вид в перспективе примера осуществления временно устанавливаемого медицинского устройства, обеспечивающего обзор в прямом и обратном направлении, причем указанное устройство отделено от установочного приспособления и показана часть устройства, обеспечивающая формирование изображения при обзоре в прямом направлении.
Фиг.9 - вид в перспективе примера осуществления временно устанавливаемого медицинского устройства, обеспечивающего обзор в прямом и обратном направлении, которое представлено на Фиг.8, причем указанное устройство отделено от установочного приспособления, и показана часть устройства, обеспечивающая формирование изображения при обзоре в обратном направлении.
Фиг.10 - вид в разрезе примера осуществления временно устанавливаемого медицинского устройства, обеспечивающего обзор в прямом и обратном направлении, которое представлено на Фиг.8 и 9.
Фиг.11 - вид в разрезе примера осуществления временно устанавливаемого медицинского устройства, изображенного на Фиг.10, которое прикреплено к брюшной стенке одной или большим числом крепежных деталей.
Фиг.12 - вид в перспективе примера осуществления временно устанавливаемого медицинского устройства с представлением части устройства, обеспечивающей формирование изображения при обзоре в обратном направлении.
Фиг.13 - вид сверху примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.12.
Фиг.14 - вид снизу примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.12.
Фиг.15 - изображение в разобранном перспективном виде примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.12.
Фиг.16 - вид в перспективе снизу примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.12, причем крепежные детали находятся в отведенном положении.
Фиг.17 - вид в перспективе снизу примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.12, причем крепежные детали находятся в выдвинутом, или рабочем, положении, то есть выведены наружу из соответствующих прорезей.
Фиг.18 - вид в разрезе примера осуществления крепежной детали в полностью отведенном нерабочем положении, причем указанная крепежная деталь полностью размещена в прорези, так что острый конец не выступает наружу.
Фиг.19 - вид в разрезе примера осуществления крепежной детали, которая повернута примерно на половину полного диапазона поворота - приблизительно на 90 градусов в результате поворота манипулятора по часовой стрелке.
Фиг.20 - вид в разрезе примера осуществления манипулятора крепежных деталей, повернутого по часовой стрелке на полный диапазон поворота, причем выступающее ребро, прошедшее за фиксирующее ребро, прижато к указанному фиксирующему ребру.
Фиг.21 - вид в разрезе примера осуществления манипулятора крепежных деталей, повернутого против часовой стрелки относительно положения, указанного на Фиг.20, причем крепежная деталь повернута примерно на половину полного диапазона поворота.
Фиг.22 - вид сверху примера осуществления временно устанавливаемого медицинского устройства, причем манипулятор не показан для указания положения тяг, когда крепежные детали находятся в отведенном положении.
Фиг.23 - вид сверху примера осуществления временно устанавливаемого медицинского устройства, причем манипулятор не показан для указания положения тяг, когда крепежные детали находятся в выдвинутом, или рабочем, положении.
Фиг.24 - пример осуществления установочной ручки и установочного приспособления, предназначенных для размещения, установки крепления, снятия крепления, извлечения или перемещения временно устанавливаемого медицинского устройства при помощи гибкого вала.
Фиг.25 - изображение в разобранном перспективном виде примера осуществления установочной ручки, установочного приспособления и гибкого вала, представленных на Фиг.24.
Фиг.26 - вид сбоку примера осуществления установочной ручки, установочного приспособления и гибкого вала, представленных на Фиг.24, причем половина корпуса не показана для представления внутренних деталей в нерабочем, незакрепленном положении.
Фиг.27 - вид сбоку примера осуществления установочной ручки, установочного приспособления и гибкого вала, представленных на Фиг.24, причем половина корпуса не показана для представления внутренних деталей в рабочем, закрепленном положении.
Фиг.28 - вид сбоку в увеличенном масштабе детали примера осуществления кулачкового механизма установочного приспособления, представленного на Фиг.24, причем указанный механизм предназначен для преобразования поступательного движения во вращательное движение.
Фиг.29 - вид сверху в перспективе в увеличенном масштабе примера осуществления футляра камеры, входящего в состав установочного приспособления, представленного на Фиг.24.
Фиг.30 - вид снизу в перспективе в увеличенном масштабе примера осуществления футляра камеры и манипулятора, входящих в состав установочного приспособления, представленного на Фиг.24.
Фиг.31 - вид с частичным разрезом примера осуществления футляра камеры, входящего в состав установочного приспособления, представленного на Фиг.24.
Фиг.32 - пример осуществления временно устанавливаемого медицинского устройства, содержащего функции формирования изображения при обзоре в прямом и обратном направлении.
Фиг.33 - пример осуществления временно устанавливаемого медицинского устройства, содержащего зажим для ретракции ткани.
Фиг.34 - пример осуществления временно устанавливаемого медицинского устройства, содержащего зажим для тканей.
Фиг.35 - пример осуществления временно устанавливаемого медицинского устройства, содержащего фиксирующий зажим.
Фиг.36 - пример осуществления временно устанавливаемого медицинского устройства, содержащего устройство распределения питания, источник подсветки и камеру.
Фиг.37 - пример осуществления временно устанавливаемого медицинского устройства, содержащего расширитель для создания свободного пространства между слоями ткани.
Фиг.38 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки с представлением эндоскопического троакара, введенного в полость желудка через пищевод.
Фиг.39 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки, представленных на Фиг.38, с представлением перфорационного устройства, выдвинутого из дистального конца эндоскопического троакара.
Фиг.40 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки, представленных на Фиг.39, с представлением дилатационного баллона, введенного через отверстие, созданное перфорационным устройством.
Фиг.41 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки, представленных на Фиг.40, с представлением дистального конца эндоскопического троакара, введенного через отверстие в стенке желудка, сформированное дилататором.
Фиг.42 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки, представленных на Фиг.41, с представлением гибкого вала и установочного приспособления, проведенных через дистальный конец эндоскопического троакара.
Фиг.43 - вид в разрезе желудка, желудочно-кишечного тракта и брюшной стенки, представленных на Фиг.42, с представлением примера осуществления временно устанавливаемого медицинского устройства, закрепленного на брюшной стенке.
ОПИСАНИЕ
Перед представлением подробного описания различных примеров осуществления изобретения следует отметить, что эти примеры осуществления не ограничиваются способами применения или использованием конкретной конструкции и компонентов, указанных на прилагаемых фигурах и в последующем описании. Представленные примеры осуществления изобретения могут быть использованы в составе или включены в другие примеры осуществления изобретения с изменениями и дополнениями, а также могут выполняться различными способами. Например, временно устанавливаемые медицинские устройства описаны в настоящем документе только для иллюстративных целей и не ограничивают объем или область использования изобретения. Кроме того, если не указано иное, термины и выражения, использованные в настоящем документе, представлены для целей описания иллюстративных примеров осуществления изобретения, удобного для понимания читателем, и не ограничивают объем изобретения.
В представленном далее описании одинаковые обозначения позиций на различных фигурах указывают идентичные или аналогичные элементы устройства. Кроме того, очевидно, что в приведенном ниже описании такие термины как «передний», «задний», «внутри», «снаружи» используются для удобства описания, а не являются ограничивающими терминами. Терминология, используемая в настоящем документе, не является ограничивающей, поскольку описанные устройства или их элементы могут быть закреплены или использованы с применением другой ориентации. Далее представлено подробное описание различных примеров осуществления изобретения со ссылкой на прилагаемые фигуры.
Временно устанавливаемые медицинские устройства по настоящему изобретению, описанные в данном документе, могут быть введены в тело пациента с использованием малоинвазивных хирургических операций или известных способов открытого хирургического вмешательства. Малоинвазивные способы обеспечивают повышение точности и эффективности доступа к рабочей зоне для проведения диагностических и терапевтических процедур. В некоторых случаях предпочтительным является введение в тело пациента временно устанавливаемых медицинских устройств с использованием комбинации малоинвазивных и открытых хирургических способов. Соответственно, различные примеры осуществления временно устанавливаемых медицинских устройств, описанные в настоящем документе, могут использоваться при проведении эндоскопических и/или лапароскопических хирургических операций, обычной лапаротомии или любых комбинаций указанных способов. В одном из примеров осуществления изобретения временно устанавливаемые медицинские устройства, описанные в данном документе, вводятся через естественные отверстия тела, такие как ротовое отверстие, анус и/или влагалище. После введения устройства через естественное отверстие для достижения внутренних органов могут использоваться трансорганные или транслюминальные хирургические процедуры. При использовании метода транслюминальной эндоскопической хирургии через естественные отверстия гибкая часть эндоскопа вводится в тело пациента через одно большее число естественных отверстий с целью отображения и лечения больной ткани в рабочей зоне с использованием обзора на линии прямой видимости, камер или других устройств формирования изображения. Хирургические инструменты, такие как представляющие собой различные примеры осуществления временно устанавливаемых медицинских устройств, описанные в настоящем документе, могут вводиться через рабочий канал эндоскопа для выполнения ключевых хирургических манипуляций (КХМ). Процедуры транслюминальных эндоскопических манипуляций через естественные отверстия, разработанные компанией Ethicon Endosurgery, Inc., известны специалистам в данной области как «транслюминальная эндоскопическая хирургия через естественные отверстия» (NOTES™).
Различные примеры осуществления временно устанавливаемых медицинских устройств, описанные в настоящем документе, могут применяться при проведении эндоскопических, лапароскопических процедур, открытых хирургических вмешательств или любой комбинации указанных способов. Эндоскопия представляет собой малоинвазивный способ проведения хирургических операций, обеспечивающий реализацию малоинвазивной хирургии и связанный с осмотром внутренних органов тела человека для медицинских целей. Эндоскопия может проводиться с использованием инструмента, называемого эндоскопом. Эндоскопия представляет собой малоинвазивную процедуру медицинской диагностики, используемую для оценки состояния поверхности органов посредством введения в тело трубки небольшого размера, которое в основном осуществляется через естественные отверстия либо через сравнительно небольшие разрезы, или «замочные скважины». Через эндоскоп оператор осматривает поверхность органов, включая патологические или больные ткани, имеющие повреждения и другие отклонения от нормы. Эндоскоп может содержать жесткую или гибкую трубку и дополнительно к формированию изображения для визуального осмотра и фотографирования может быть также приспособлен и укомплектован для проведения биопсии, извлечения инородных предметов и введения медицинских инструментов в область проведения манипуляций, которая в настоящем документе называется зоной интереса.
Лапароскопическая и торакоскопическая хирургия относятся к более широкой области эндоскопии. Лапароскопия также представляет собой малоинвазивный способ хирургического вмешательства, при осуществлении которого операции органов брюшной полости проводят с использованием небольших разрезов (обычно 0,5-1,5 см), или так называемых замочных скважин, в сравнении с разрезами больших размеров, требуемыми при проведении традиционных открытых хирургических операций. Лапароскопическая хирургия охватывает операции, которые проводятся в брюшной и тазовой полостях, а хирургия «замочных скважин», используемая при проведении операций в торакальной, или грудной, полости, называется торакоскопической хирургией.
Основным элементом лапароскопической хирургии является использование лапароскопа, который может представлять собой жесткую телескопическую систему с объективами, обычно связанную с видеокамерой (функционирующей на основе одной или нескольких интегральных схем (кристаллов)), или структуру, функционирующую на основе дистальной электронной интегральной схемы (кристалла), при этом оптическая система видеокамеры и электронные схемы размещены в наконечнике лапароскопа. На проксимальном конце лапароскопа может быть предусмотрен волоконно-оптический кабель, подключенный к источнику «холодного» свечения (галогенному или ксеноновому), предназначенному для подсветки операционного поля. В другом примере подсветка может быть обеспечена посредством использования твердотельного элемента, такого как светодиод (СИД), расположенного на дистальном конце лапароскопа. Лапароскоп можно ввести через троакар диаметром 5 мм или 10 мм или через отверстие «замочной скважины» для обзора операционного поля. В брюшную полость обычно нагнетают углекислый газ, поднимающий стенку брюшной полости над внутренними органами в форме купола, что обеспечивает создание свободного пространства для манипуляций и обзора. Использование углекислого газа обусловлено тем, что он является обычным компонентом тела человека и может быть выведен системой дыхания в случае абсорбции углекислого газа тканями.
Различные примеры осуществления временно устанавливаемых медицинских устройств, описанные в настоящем документе, могут охватывать устройства, которые вводятся в тело пациента с целью получения визуального представления зоны интереса. Указанные устройства могут быть введены в тело пациента через естественные отверстия с использованием малоинвазивных процедур (например, процедур NOTESTM) или при помощи приспособления, введенного, например, через троакар, и могут обеспечивать осмотр зоны операционного действия или анатомической структуры, например, легких, печени, желудка, желчного пузыря, мочевыводящих путей, половых путей и тканей желудочно-кишечного тракта. После размещения в рабочей зоне временно устанавливаемые устройства формирования изображения обеспечивают получение изображений, которые дают врачу-клиницисту возможность проведения более точной диагностики и более эффективного лечения больной ткани. Некоторые элементы временно устанавливаемого устройства формирования изображения могут быть введены в зону операционного действия чрескожно. Другие элементы временно устанавливаемого устройства формирования изображения могут быть введены в зону операционного действия с использованием эндоскопических способов (например, лапароскопических и/или торакоскопических процедур) через небольшие разрезы «замочной скважины» при помощи троакара или через естественные отверстия. Примеры осуществления временно устанавливаемых устройств формирования изображения могут обеспечивать получение требуемых изображений ткани в процессе проведения процедур терапии in vivo, используемых для удаления или разрушения живых раковых тканей, опухолей, образований, разрастаний и других патологических новообразований ткани, находящихся в зоне операционного действия. В других примерах осуществления временно устанавливаемых устройств для формирования изображения предусмотрена передача электрических сигналов на приемник с последующим преобразованием указанных сигналов в визуальное изображение. Сигналы могут передаваться от пациента по беспроводной системе связи или по проводникам, введенным чрескожно либо по пути доступа, который использован для введения транслюминального эндоскопического устройства. В других примерах осуществления питание временно устанавливаемых устройств для формирования изображения может осуществляться от встроенных источников питания, таких как аккумуляторные батареи, через чрескожные проводники, беспроводные средства питания или проводники, проведенные по тому же каналу, который использован для введения транслюминального эндоскопического устройства. Однако указанные примеры осуществления изобретения ограничены временно устанавливаемыми устройствами формирования изображения и подсветки.
Например, в других примерах осуществления изобретения различные временно устанавливаемые устройства, содержащие рабочие инструменты, могут быть прикреплены к соответствующему установочному приспособлению и проведены через гибкий рабочий канал эндоскопа, введенного в тело пациента через естественное отверстие. Примерами указанных временно устанавливаемых устройств, содержащих рабочие инструменты, могут быть, среди прочих, зажимы для ретракции ткани, зажимы для тканей, фиксаторы эндоскопа, устройства распределения питания, расширители, предназначенные для создания свободного пространства между внутренними полостями тела, органами и/или разрезанными участками ткани, ритмоводители, сосудистые порты, катетеры (такие как катетеры, используемые с желудочными бандажами), а также водители ритма желудка и другие устройства.
На Фиг.1-5 представлен один из примеров осуществления временно устанавливаемого медицинского устройства. В указанном временно устанавливаемом медицинском устройстве предусмотрена функция формирования изображения при обзоре в обратном направлении. В одном примере осуществления изобретения временно устанавливаемое медицинское устройство содержит систему формирования изображения с элементами визуального представления изображения. Временно устанавливаемое устройство может быть доставлено в зону операционного действия с использованием описанных ранее малоинвазивных хирургических процедур. Механизм крепления обеспечивает быстрое и простое крепление устройства к внутренним тканям тела с возможностью последующего извлечения. Реверсивный механизм крепления обеспечивает быстрое и простое приведение в действие крепления, снятие крепления, размещение, изменение положения и/или извлечение временно устанавливаемого устройства. Механизм крепления можно привести в действие с использованием стандартных имеющихся на рынке установочных приспособлений или при помощи установочных приспособлений, изготовленных по заказу. Один из примеров осуществления изобретения, в котором установочное приспособление функционирует совместно с временно устанавливаемым устройством, описан ниже. Установочное приспособление можно использовать для размещения устройства в рабочей зоне с последующим быстрым и простым приведением в действие механизма крепления с целью закрепления устройства на ткани внутри тела пациента.
На Фиг.1 представлен вид в перспективе примера осуществления системы, предназначенной для введения временно устанавливаемого медицинского устройства в тело пациента. В одном примере осуществления изобретения временно устанавливаемое медицинское устройство содержит систему формирования изображения, предназначенную для представления изображения анатомических структур пациента при обзоре в направлении, указанном стрелкой «A», после установки устройства. Режим обзора в обратном направлении, указанном стрелкой «A», используется для формирования изображения, когда временно устанавливаемое медицинское устройство прикреплено к элементам анатомической структуры пациента. В одном примере осуществления изобретения временно устанавливаемое устройство вводят с использованием малоинвазивных хирургических процедур (например, эндоскопических, лапароскопических, торакоскопических процедур или любой их комбинации). В примере осуществления изобретения, представленном на Фиг.1, система 100 установочного приспособления камеры содержит временно устанавливаемую камеру 102, вал 104, установочное приспособление 106 и установочную ручку 108. В одном примере осуществления изобретения вал 104 может представлять собой гибкую или шарнирно сочлененную трубку. Камера 102 может предварительно размещаться в установочном приспособлении 106. На указанном фигуре показана камера 102, предварительно размещенная в установочном приспособлении 106. Термин «камера» может касаться любого устройства формирования изображения, содержащего средства формирования изображения, обеспечивающие прием оптических сигналов и преобразование данных изображения в электрические сигналы, которые могут быть записаны в электронной памяти или переданы на внешние устройства для представления изображений в реальном времени. Изображения могут содержать неподвижные изображения или последовательность изображений, формирующих изменяющуюся картину (например, кинофильмы или видеофильмы). Электрические сигналы можно передавать с использованием беспроводной системы или по проводникам. Перед введением камеры 102 в эндоскопический троакар эндоскопист (например, врач-клиницист, лечащий врач или хирург) вставляет камеру 102 в установочное приспособление 106 и прикрепляет узел, включающий в себя предварительно установленную камеру 102 и установочное приспособление 106, к дистальному концу вала 104. Далее узел, содержащий камеру 102 и установочное приспособление 106, вводится через гибкий эндоскопический троакар и устанавливается в требуемом положении на анатомической структуре (например, в зоне операционного действия или рабочей зоне) в теле пациента с использованием встроенного механизма крепления. Камера 102 может устанавливаться в требуемой плоскости ткани с использованием встроенного механизма крепления. Однако представленные примеры осуществления изобретения не ограничиваются данной областью, поскольку для доставки камеры 102 в требуемую зону интереса могут быть использованы другие способы.
В одном примере осуществления изобретения установочное приспособление 106 предназначено для размещения и крепления в нем камеры 102, а также для соединения с установочной ручкой 108 при помощи вала 104. Гибкий вал 104 предназначен для введения установочного приспособления 106 и камеры 102, например, через внутренний рабочий канал гибкого эндоскопа. Установочная ручка 108 при помощи вала 104 соединена с камерой 102 через установочное приспособление 106. При проведении транслюминальных процедур с использованием гибкого эндоскопа гибкий или шарнирно сочлененный вал 104 обеспечивает возможность прохождения установочным приспособлением 106 извилистых естественных отверстий тела пациента по рабочему каналу гибкого эндоскопа. Например, вал 104 можно изготовить из достаточно гибкого материала или предусмотреть шарнирно сочлененные элементы для обеспечения прохождения желудочно-кишечного (ЖК) тракта. В одном примере осуществления изобретения камера 102 размещена в установочном приспособлении 106 таким образом, что обзор осуществляется в прямом направлении, указанном стрелкой «B», и, следовательно, камера 102 обеспечивает предоставление обратной связи в виде изображения при перемещении вала 104 вдоль желудочно-кишечного тракта в процессе введения установочного приспособления 106 и камеры 102 в тело пациента. После приведения в состояние готовности к использованию камеру 102 можно установить в требуемое положение. В одном примере осуществления изобретения камера 102 содержит множество активных элементов приема изображения или объективов, обеспечивающих возможность выбора направления «A» или «B» обзора. Например, один элемент приема изображения в процессе установки может использоваться для обзора в прямом направлении, указанном стрелкой «B», а второй элемент приема изображения после установки может использоваться для обзора в обратном направлении, указанном стрелкой «A». Камера 102 может содержать механизм крепления, предназначенный для крепления камеры 102 к тканям тела пациента в требуемом положении. Механизм крепления содержит одну или большее число крепежных деталей 120 (Фиг.4). В представленном примере осуществления изобретения крепежные детали 120 выполнены в виде иглообразных крючков, обеспечивающих проникновение сквозь ткань и крепление к ней камеры 102. Механизм крепления может быть приведен в действие посредством воздействия через пазы или отверстия 122a, 122b (Фиг.5) с использованием имеющихся на рынке инструментов или установочного приспособления 106. Установочное приспособление 106 может иметь конструкцию, обеспечивающую возможность введения, размещения, изменения положения и извлечения камеры 102. Как более конкретно указано ниже, установочная ручка 108 может содержать пусковые элементы для установки и извлечения, обеспечивающие введение и удаление механизма крепления после закрепления камеры 102 в требуемом положении. Однако указанные примеры осуществления изобретения не ограничиваются данной областью использования.
На Фиг.2 представлен вид в перспективе примера осуществления установочной ручки, предназначенной для использования с установочным приспособлением и механизмом крепления, указанными на Фиг.1. В представленном примере осуществления изобретения установочная ручка 108 содержит корпус 109, пусковой элемент 110 для установки и извлечения, а также кнопку блокировки 112. Пусковой элемент 110 используется для крепления камеры 102 (Фиг.1) к тканям в зоне интереса. Кнопка блокировки 112 препятствует непреднамеренному приведению в действие механизма крепления (например, крепежных деталей 120 в форме иглообразных крючков, представленных на Фиг.4). Камера 102 может быть прикреплена к тканям посредством воздействия на кнопку блокировки 112, например, путем нажатия на кнопку блокировки 112 и приведения в действие пускового элемента 110, например, посредством нажатия на пусковой элемент 110. Другие способы воздействия на кнопку блокировки 112 и приведения в действие пускового элемента 110 также находятся в пределах объема изобретения, описанного в настоящем документе. Пусковой элемент 110 может иметь конструкцию, обеспечивающую возврат в исходное положение после полного опускания или нажатия. Если камера 102 не установлена в требуемом положении, то врач-клиницист может возвратить пусковой элемент 110 в исходное положение посредством нажатия кнопки блокировки 112 для закрепления камеры 102 в футляре 114 (Фиг.3). Это приводит к извлечению крепежных деталей 120 из ткани и их возврату в одну или большее число прорезей 116 (Фиг.3), предусмотренных в камере 102.
На Фиг.3 представлен вид в перспективе примера осуществления временно устанавливаемого медицинского устройства и установочного приспособления в положении готовности к использованию. В представленном примере осуществления изобретения камера 102 предварительно установлена в футляр 114 и прикреплена к одному из примеров осуществления установочного приспособления 106. На Фиг.4 представлено изображение в разобранном виде примера осуществления временно устанавливаемого медицинского устройства и установочного приспособления, изображенных на Фиг.3, в расцепленном положении после отделения от установочного приспособления 106. В одном примере осуществления изобретения, рассматриваемом со ссылкой на Фиг.3 и 4, часть установочного приспособления 106, представляющая собой футляр 114 для камеры, содержит консоли 128a, 128b, предназначенные для сцепления с соответствующими выемками 130a, 130b (выемка 130b не показана), включающими в себя направленные внутрь выступы 132a, 132b (выступ 132a не показан), предназначенные для крепления камеры 102 в футляре 114. В состоянии готовности к использованию, представленном на Фиг.3, камера 102 зафиксирована в футляре 114 и удерживается выступами 132a, 132b, форма которых соответствует форме выемок 130a, 130b, выполненных в элементе 135 корпуса камеры 102. Выступы 132a, 132b имеют форму, обеспечивающую сцепление с соответствующими уступами 134a, 134b (уступ 134b не показан), когда камера 102 находится в установочном приспособлении 106 в положении готовности к использованию. Камера 102 может оставаться зафиксированной в футляре 114 до закрепления крепежных деталей 120 в ткани. Как представлено на Фиг.3, в нерабочем положении крепежные детали 120 располагаются внутри соответствующих прорезей 116. В одном примере осуществления изобретения камера 102 содержит аккумуляторную батарею 118, предназначенную для обеспечения функционирования различных электрических и/или электромеханических элементов камеры 102. Например, батарея 118 подает электрическую энергию для питания источников подсветки, устройств формирования изображения и двигателей, предназначенных для реализации функций ориентации, панорамирования и масштабирования устройств формирования изображения или соответствующей оптической системы либо объектива.
Как показано на Фиг.4, крепежные детали 120 находятся в зацепленном, или рабочем, положении. Крепежные детали 120 используются для крепления камеры 102 к ткани в зоне интереса (не показана). Выемки 130a, 130b выполнены в элементе 135 корпуса камеры 102. Выемки 130a, 130b (выемка 130b не показана) обеспечивают сцепление с соответствующими выступами 132a, 132b (выступ 132a не показан), форма которых соответствует форме выемок 130a, 130b. Выступы 132a, 132b обеспечивают сцепление с соответствующими уступами 134a, 134b (уступ 134b не показан) для обеспечения крепления камеры 102 в футляре 114, составляющем часть установочного приспособления 106. Элемент 135 корпуса камеры 102 дополнительно содержит выступающие наружу элементы 124a, 124b, которые входят в соответствующие вырезы 126a, 126b, когда камера 102 находится в футляре 114, составляющем часть установочного приспособления 106.
На Фиг.5 представлен вид в перспективе одного из примеров осуществления временно устанавливаемого медицинского устройства. В указанном примере осуществления изобретения камера 102 отделена от установочного приспособления 106. На Фиг.6 представлен вид в разрезе временно устанавливаемого медицинского устройства, изображенного на Фиг.5. В одном примере осуществления изобретения, представленном со ссылкой на Фиг.5 и 6, камера 102 содержит элемент 135 корпуса, первый объектив 138a, манипулятор 136 крепежных деталей, один или большее число источников подсветки 140a, 140b, размещенных на выступающих наружу элементах 124a, 124b, пазы 122a, 122b для фиксации исполнительного механизма, одну или большее число крепежных деталей 120, первое устройство формирования изображения 139 и аккумуляторную батарею или множество батарей 118. Первый объектив 138a может представлять собой отдельную оптическую линзу или систему оптических линз, связанных с устройством формирования изображения 139, размещенным в элементе 135 корпуса камеры 102. В одном примере осуществления изобретения первый объектив 138a содержит крышку 141 объектива и первый объектив 143. Крышка 141 объектива обеспечивает герметизацию объектива 143 и электронной схемы, содержащейся в элементе 135 корпуса камеры 102, для предотвращения проникновения внутрь жидкостей организма.
Камера 102 может использоваться в процессе проведения транслюминальных эндоскопических процедур через естественные отверстия для получения изображений операционного поля, подобных по качеству и ориентации изображениям, получаемым при проведении открытых хирургических вмешательств или лапароскопических процедур. Например, при выполнении лапароскопических процедур для изменения ориентации и получения качественного изображения при требуемом угле обзора лапароскоп можно вращать вокруг его оптической оси, перемещать в прямом и обратном направлении, поворачивать вокруг точки, определенной троакаром или отверстием в ткани тела. При выполнении лапароскопических процедур врач-клиницист может манипулировать лапароскопом для получения оптимального изображения операционного поля. Кроме того, лапароскоп можно использовать для панорамирования и/или масштабирования изображения, причем врач-клиницист имеет возможность манипулирования лапароскопом независимо от операций, проводимых с тканями или органами, расположенными в области операционного поля.
В одном примере осуществления изобретения первый объектив 143 может быть оптически связан с одним или большим числом устройств формирования изображения 139 для преобразования оптического изображения в электрический сигнал, аналогичный сигналу, используемому в цифровых камерах и других электронных устройствах формирования изображения. В одном примере осуществления изобретения устройство формирования изображения 139 содержит одну или большее число матриц приборов с зарядовой связью (ПЗС) или комплементарных структур металл-оксид-полупроводник (КМОП), таких как КМОП-матрицы. Устройство формирования изображения 139 осуществляет преобразование оптического сигнала в электрический сигнал. Устройство формирования изображения 139, имеющее большую площадь, может обеспечить качество изображения, эквивалентное качеству, получаемому при использовании стандартных лапароскопов. В одном примере осуществления изобретения устройство формирования изображения 139 содержит матрицу преобразователей, имеющую диаметр области приема данных изображения, равный примерно 10 мм. Для реализации функций ориентации, панорамирования и масштабирования устройства формирования изображения 139, а также получения оптимального угла обзора целевой анатомической структуры при требуемой ориентации могут использоваться двигатели.
Первое устройство формирования изображения 139 подключено к первой плате 147a. Первая плата 147a дополнительно содержит электронные компоненты или элементы, требуемые для обработки, хранения и/или передачи изображений, полученных первым устройством формирования изображения 139. Обработка изображений может осуществляться с использованием любых пригодных для данной цели цифровых или аналоговых схем и/или способов обработки сигналов. Кроме того, изображения можно записывать на электронных носителях, таких как, например, устройства памяти. Данные изображений можно передавать по проводникам или с использованием беспроводной системы на внешние устройства для отображения или дополнительной обработки изображений в реальном времени. Вторую плату 147b можно использовать для подключения и крепления батареи 118. Первая и вторая платы 147a, 147b связаны разъемом 149. Для специалистов в данной области техники очевидно, что без ограничения объема представленного примера осуществления может использоваться одна плата и дополнительные платы. Платы 147a, 147b могут быть изготовлены с использованием различных подложек, таких как подложки печатных плат или керамические подложки, и могут быть связаны с одним или большим числом разъемов 149. Канал 151 предусмотрен для размещения проводников, передающих сигналы изображения или питание на камеру 102. Проводники могут подключаться с возможностью отключения к одному или большему числу разъемов, размещенных на первой или второй плате 147a, 147b.
Один или большее число источников подсветки 140a, 140b могут размещаться на выступающих наружу элементах 124a, 124b элемента 135 корпуса для подсветки участка, изображение которого требуется получить. Источники подсветки 140a, 140b могут содержать источники света на основе светодиодов. В одном примере осуществления изобретения источники 140a, 140b содержат один светодиод или несколько светодиодов для получения подсветки с требуемым спектральным составом. В других примерах осуществления изобретения через рабочий канал гибкого эндоскопа вводят волоконно-оптические источники подсветки. В дополнительных примерах осуществления изобретения источники подсветки 140a, 140b подключают к двигателям для осуществления функций панорамирования и масштабирования с помощью устройства формирования изображения 139 и для оптимальной подсветки зоны интереса.
Для специалистов в данной области техники очевидно, что первый объектив 138a и/или источники подсветки 140a, 140b могут быть размещены на переднем или заднем концах камеры 102. Например, в примере осуществления изобретения, представленном на Фиг.1-6, первый объектив 138a и источники подсветки 140a, 140b ориентированы для обзора и приема данных изображения в направлении внутрь, указанном стрелкой «A». К примеру, когда камера 102 установлена и закреплена в требуемом положении, первый объектив 138a и источники подсветки 140a, 140b ориентированы для обзора анатомических структур в операционной зоне с требуемым углом обзора и предоставлением визуальной обратной связи в процессе выполнения хирургической процедуры.
На Фиг.7 представлен вид в разрезе временно устанавливаемого дистанционно управляемого медицинского устройства, изображенного на Фиг.5, которое прикреплено к брюшной стенке одной или большим числом крепежных деталей. В примере осуществления изобретения, представленном на Фиг.7, пример осуществления камеры 102, представленный в поперечном разрезе, размещен в брюшной полости 210 пациента и прикреплен к брюшной стенке 202 одной или большим числом крепежных деталей 120. Камера 102 чрескожно связана изолированными электрическими проводниками 206a, 206b с источником питания 218, предназначенным для медицинского оборудования. Чрескожные проводники 206a, 206b обеспечивают питание электрическим током камеры 102 и/или передачу сигналов изображения между камерой 102 и внешним монитором. Хотя проводники изображены в виде единичных проводов, для специалистов в данной области техники очевидно, что каждый из чрескожных проводников 206a, 206b может содержать множество изолированных проводников, размещенных в изолирующей оболочке. Первый конец 203a чрескожных проводников 206a, 206b подключен к камере 102, а второй конец 203b - к источнику питания 218. Чрескожные проводники 206a, 206b содержат электрически изолирующую наружную оболочку, имеющую общий наружный диаметр, обеспечивающий возможность прохождения сквозь кожу 204 и брюшную стенку 202 без необходимости проведения специальных процедур ушивания. В одном примере осуществления изобретения общий наружный диаметр изолирующей оболочки может составлять немногим менее 17 калибра (1,15 мм) согласно Американскому стандарту проводов. Как указано на Фиг.7, чрескожные проводники 206a, 206b проходят сквозь кожу 204 и брюшную стенку 202 и проведены в канал 151 для подключения к камере 102. В одном примере осуществления изобретения чрескожные проводники 206a, 206b могут быть жестко связаны с камерой 102 для обеспечения врачу-клиницисту возможности размещения камеры 102 посредством манипулирования чрескожными проводниками 206a, 206b снаружи ткани тела пациента. В одном примере осуществления изобретения чрескожные проводники 206a, 206b могут быть подключены к камере 102 с возможностью отсоединения. Проведение чрескожных проводников 206a, 206b сквозь кожу 204 обеспечивает свободное пространство в рабочем канале эндоскопа для дополнительных хирургических инструментов.
В одном примере осуществления изобретения источник питания 218 представляет собой низковольтный источник постоянного тока. Источник питания 218 можно разместить за брюшной стенкой 202 или в области 220 снаружи ткани тела пациента. Первый и второй чрескожные проводники 206a, 206b могут использоваться для подачи питания на камеру 102 и/или другие хирургические инструменты и принадлежности. В другом примере осуществления изобретения камера 102 при помощи первого и второго чрескожных проводников 206a, 206b связана с внешним монитором. В одном примере осуществления изобретения питание камеры 102 может осуществляться от внешнего источника питания 218, аккумуляторной батареи 118 или комбинации указанных устройств. Внешний источник питания 218 является оптимальным вариантом, если камера 102 укомплектована одним или большим числом источников подсветки 140a, 140b, устройством формирования изображения 139 и одним или большим числом двигателей для размещения устройств формирования изображения 139, которые совместно могут требовать подачи большего объема энергии, чем может обеспечить одна батарея 118. Источник питания 218 может также осуществлять подачу питания на другие хирургические инструменты и принадлежности, как требующие, так и не требующие установки.
В некоторых примерах осуществления изобретения изолированные проводники проходят через рабочий канал эндоскопа. В одном примере осуществления изобретения на этапах доставки и установки в требуемом положении съемные проводники могут быть подключены к камере 102, что является типичным для транслюминальных эндоскопических операций через естественные отверстия. Съемные проводники могут проходить к камере 102 через рабочий канал гибкого эндоскопа или вдоль маршрута прохождения эндоскопа. После установки камеры 102 съемные проводники можно отключать от камеры 102 и извлекать из рабочего канала эндоскопа или вдоль маршрута прохождения эндоскопа. На этапах доставки и установки камера 102 первоначально может быть подключена к источнику питания 218 съемными проводниками. После установки камеры 102 съемные проводники могут отключаться от камеры 102, а чрескожные проводники 206a, 206b могут подключаться к камере 102 для обеспечения подачи питания от источника питания 218.
В одном примере осуществления изобретения камера 102 может содержать беспроводный компонент, предназначенный для беспроводной передачи изображений за пределы тела пациента. Беспроводный компонент может представлять собой устройство, функционирующее в диапазоне радиочастот (РЧ) и обеспечивающее передачу изображений от пациента на внешний монитор. Питание беспроводного компонента может осуществляться от батареи 118 или от источника питания 218 по чрескожным проводникам 206a, 206b. В одном примере осуществления изобретения беспроводный компонент содержит беспроводный приемопередатчик (например, РЧ-передатчик и приемник). Изображения, принятые устройством формирования изображения 139, могут передаваться и приниматься радиочастотным беспроводным устройством на основе использования известной технологии радиочастотных систем телеметрии, которая исключает необходимость электрического подключения.
На Фиг.8 представлен вид в перспективе примера осуществления отделенного от установочного приспособления временно устанавливаемого медицинского устройства, имеющего функции обзора в прямом и обратном направлении, причем указана часть устройства, обеспечивающая прием данных изображения при обзоре в прямом направлении. На Фиг.9 представлен вид в перспективе примера осуществления отделенного от установочного приспособления временно устанавливаемого медицинского устройства (указанного на Фиг.8), имеющего функции обзора в прямом и обратном направлении, причем указана часть устройства, обеспечивающая прием данных изображения при обзоре в обратном направлении. На Фиг.10 представлен вид в разрезе примера осуществления временно устанавливаемого медицинского устройства (представленного на Фиг.8 и 9), имеющего функции обзора в прямом и обратном направлении. В одном примере осуществления изобретения, представленном со ссылкой на Фиг.8-10, камера 105 содержит корпус 153, первый объектив 138a, второй объектив 138b, манипулятор 136 крепежных деталей, один или большее число источников подсветки 140a, 140b, размещенных на выступающих наружу элементах 124a, 124b, пазы 122a, 122b для фиксации исполнительного механизма, одну или большее число крепежных деталей 120, первое устройство формирования изображения 139, второе устройство формирования изображения 145 и батарею 155. Первый объектив 138a может представлять собой отдельную оптическую линзу или систему линз, оптически связанную с первым устройством формирования изображения 139, размещенным в корпусе 153 камеры 105, как было ранее указано при рассмотрении камеры 102. Второй объектив 138b может представлять собой отдельную оптическую линзу или систему линз, оптически связанную со вторым устройством формирования изображения 145, размещенным в корпусе 153 камеры 105. В одном примере осуществления изобретения второй объектив 138b может быть оптически связан со вторым устройством формирования изображения 145. Второе устройство формирования изображения 145 принимает оптический сигнал и преобразует его в электрические сигналы, аналогичные сигналам, используемым в цифровых камерах и других электронных устройствах формирования изображения. В одном примере осуществления изобретения второе устройство формирования изображения 145 содержит одно или большее число устройств ПЗС или КМОП, таких как КМОП-матрицы.
В представленном примере осуществления изобретения второй объектив 138b расположен на стороне, противоположной стороне размещения первого объектива 138a. При проведении типичных транслюминальных эндоскопических операций через естественные отверстия второй объектив 138b используется в режиме обзора в прямом направлении, указанном стрелкой «B», на этапах доставки и установки камеры 105 для управления перемещением установочного приспособления и камеры 105 к рабочей зоне. Второе устройство формирования изображения 145 применяется для приема оптического сигнала и преобразования его в электрические сигналы, которые записываются на электронных носителях или передаются на внешние устройства для отображения в реальном времени. Электрические сигналы передаются по проводникам или с использованием беспроводной системы.
Элемент корпуса 153 камеры 105 содержит прорези 116, в которых размещены в нерабочем положении крепежные детали 120, аналогичные крепежным деталям, описанным при рассмотрении камеры 102. Выемки 130a, 130b (выемка 130b не показана) предназначены для сцепления соответствующих выступов 132a, 132b, предусмотренных на футляре 114 камеры, составляющем часть установочного приспособления 106, как было ранее описано при рассмотрении Фиг.3 и 4. Выступы 132a, 132b входят в сцепление с соответствующими уступами 134a, 134b (уступ 134b не показан) для обеспечения фиксации камеры 105 в требуемом положении в футляре 114, составляющем часть установочного приспособления 106. Корпус 153 камеры 105 также содержит выступающие наружу элементы 124a, 124b, входящие в соответствующие вырезы 126a, 126b футляра 114 (Фиг.3 и 4), когда камера 105 находится в футляре 114, составляющем часть установочного приспособления 106.
Как указано ранее, первое устройство формирования изображения 139 подключено к первой плате 147a, которая содержит электронные компоненты, требуемые для обработки, хранения и/или передачи изображений, принятых первым устройством формирования изображения 139. Батарея 155 подключена ко второй плате 147b. Первая и вторая платы 147a, 147b подключены к разъему 149. Для специалистов в данной области техники очевидно, что в представленном примере осуществления без ограничения объема изобретения может использоваться одна плата или дополнительные платы. Платы 147a, 147b могут быть изготовлены на основе различных подложек, таких как подложки печатных плат или керамические подложки, и соединены одним или большим числом разъемов 149. Канал 151 предусмотрен для ввода проводников, по которым передаются сигналы изображения или подается питание на камеру 105. Проводники могут быть подключены с возможностью отключения к одному или большему числу разъемов, размещенных на первой или второй плате 147a, 147b.
На Фиг.11 представлен вид в разрезе примера осуществления временно устанавливаемого медицинского устройства, представленного на Фиг.10, которое прикреплено к брюшной стенке одной или большим числом крепежных деталей. В примере осуществления изобретения, представленном на Фиг.11, камера 105 прикреплена к брюшной стенке 202 в брюшной полости 210 пациента. Камера 105 связана с источником питания 218, предназначенным для медицинского оборудования, с помощью изолированных чрескожных проводников 206a, 206b, как ранее указывалось со ссылкой на Фиг.7.
На Фиг.12-15 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего средства приема данных изображения при обзоре в обратном направлении и встроенный механизм крепления. В частности, на Фиг.12 представлен вид в перспективе примера осуществления временно устанавливаемого медицинского устройства, содержащего средства приема данных изображения при обзоре в обратном направлении. На Фиг.13 представлен вид сверху примера осуществления временно устанавливаемого медицинского устройства, указанного на Фиг.12. На Фиг.14 представлен вид снизу примера осуществления временно устанавливаемого медицинского устройства, изображенного на Фиг.12. На Фиг.15 представлено изображение в разобранном перспективном виде примера осуществления временно устанавливаемого медицинского устройства, указанного на Фиг.12. В примере осуществления изобретения, представленном на Фиг.12-15, камера 102 содержит средства приема данных изображения при обзоре в обратном направлении и встроенный механизм крепления. Механизм крепления может использоваться для установки любого временно устанавливаемого или имплантируемого медицинского устройства, для которого его можно применить, включая, например, камеры, обеспечивающие обзор в прямом и обратном направлении, подобные ранее рассмотренной камере 105, зажимы для ретракции ткани, зажимы, фиксаторы эндоскопа, устройства распределения питания, расширители, ритмоводители, сосудистые порты, катетеры (такие как катетеры, используемые с желудочными бандажами), а также водители ритма желудка. Некоторые из указанных примеров осуществления изобретения подробно изображены на Фиг.32-37, представленных ниже.
В одном примере осуществления изобретения, рассмотренном со ссылкой на Фиг.12-15, камера 102 содержит объектив 138, оправу объектива 402 и корпус 404 камеры. Камера 102, имеющая встроенный механизм крепления, дополнительно содержит крепежные детали 120, манипулятор 136 крепежных деталей и множество тяг 412.
Объектив 138 может быть изготовлен из биологически совместимого материала, имеющего соответствующие оптические характеристики, такого как поликарбонат или кварцевое стекло. Объектив 138 частично размещен во внутренней полости 406 оправы 402 объектива рядом с кольцевым элементом 408. Оправа 402 объектива, корпус 404 камеры и манипулятор 136 крепежных деталей могут быть изготовлены из соответствующего биологически совместимого материала, имеющего достаточную жесткость и прочность, такого как полиэфирэфиркетон (ПЭЭК). Крепежные детали 120 и тяги 412 могут быть изготовлены из соответствующего биологически совместимого материала, такого как нержавеющая сталь.
Корпус 404 камеры содержит кольцевой обод 548, который входит в сцепление с круговой частью верхней поверхности объектива 138. Корпус 404 камеры прикреплен к оправе 402 объектива множеством шпилек 414, проходящих через соответствующие отверстия 416, выполненные в вырезах 416a в корпусе 404 камеры, причем указанные шпильки вставлены в соответствующие вырезы 418, предусмотренные в нижней части по краю оправы 402 объектива. Шпильки 414 могут быть изготовлены из соответствующего биологически совместимого материала, такого как нержавеющая сталь.
Манипулятор 136 крепежных деталей прикреплен к корпусу 404 камеры. Хотя в представленном примере осуществления изобретения манипулятор 136 крепежных деталей представлен в виде кольца, установленного с возможностью поворота с учетом корпуса 404 камеры, указанный манипулятор 136 может быть выполнен в любой пригодной для использования конфигурации и установлен любым приемлемым способом для обеспечения перемещения манипулятором 136 крепежных деталей 120 между рабочим и нерабочим положениями. Как указано на Фиг.15, корпус 404 включает в себя множество планок 420, выступающих в направлении вниз и наружу. В представленном примере осуществления изобретения предусмотрено четыре планки 420, расположенных на равном расстоянии друг от друга. Манипулятор 136 крепежных деталей содержит аналогичное число соответствующих вырезов 422, каждый из которых имеет дугообразную нижнюю часть 424. Для крепления манипулятора 136 крепежных деталей к корпусу 404 камеры вырезы 422 совмещают с планками 420 и нажимают в направлении вниз, при этом планки 420 отгибаются вовнутрь, затем достигают вырезов 422 и отклоняются наружу с размещением нижних краев 420a планок в вырезах 422, которые таким образом фиксируют манипулятор 136 крепежных деталей. Длина планок 420 и глубина вырезов 422 обеспечивают возможность осевого люфта между манипулятором 136 крепежных деталей и корпусом 404 камеры, как указано далее.
Манипулятор 136 крепежных деталей в целом может поворачиваться вокруг центральной оси корпуса 404 камеры. В представленном примере осуществления изобретения манипулятор 136 имеет возможность поворота на угол примерно 40 градусов, хотя для него может быть предусмотрен любой требуемый угол поворота. В представленном примере осуществления изобретения при повороте манипулятора 136 крепежных деталей в направлении закрепления устройства с перемещением крепежных деталей 120 в рабочее положение выход манипулятора 136 за пределы полного рабочего положения ограничивается концом 422c, достигающим планки 420.
Система фиксации образована двумя размещенными на определенном расстоянии фиксирующими ребрами 422a, 422b, выступающими вовнутрь от стенки каждого выреза 422, и соответствующим выступающим ребром 420b, проходящим наружу от планки 420. Система фиксации предотвращает поворот манипулятора 136 крепежных деталей и перемещение крепежных деталей 120 в полностью отведенном нерабочем или полностью выведенном рабочем положении под воздействием вибрации или случайной нагрузки, как указано далее.
Манипулятор 136 крепежных деталей включает в себя множество расположенных на определенном расстоянии пазов 122a, 122b, в которые может быть установлен любой соответствующий инструмент для передачи на манипулятор 136 требуемого усилия с целью выдвижения крепежных деталей 120 в рабочее положение. Пазы 122a, 122b имеют форму, обеспечивающую возможность установки в них имеющихся на рынке инструментов (в представленном примере осуществления изобретения - прямоугольную форму) или специального установочного приспособления, описанного далее. Корпус 404 камеры содержит множество выемок 130a, 130b, расположенных снизу по периметру корпуса. Выемки 130a, 130b предназначены для специального установочного приспособления 106, как указано далее.
Как видно из Фиг.13 и 14, манипулятор 136 крепежных деталей содержит отверстия 440a, совпадающие с соответствующими отверстиями 440b, выполненными в корпусе 404 камеры, когда манипулятор 136 крепежных деталей находится в нерабочем положении. При отсутствии встроенного механизма крепления отверстия 440a и 440b могут быть использованы врачом-клиницистом для закрепления камеры 102 швами.
На Фиг.16-17 представлен пример осуществления оправы 402 объектива, содержащей множество установочных выступов 426, проходящих наружу в нижней части периметра оправы 402 объектива. Как видно из Фиг.12-17, установочные выступы 426 и 426a помещаются в соответствующие выемки 428, выполненные на внутренней поверхности корпуса 404 камеры, и обеспечивают требуемое совмещение оправы 402 с корпусом 404 камеры.
На Фиг.16 представлен вид снизу в перспективе примера осуществления временно устанавливаемого медицинского устройства, изображенного на Фиг.12, с крепежными деталями, находящимися в отведенном положении. В представленном примере осуществления изобретения временно устанавливаемая камера 102 показана с крепежными деталями 120, находящимися в отведенном положении. Как показано на фигуре, крепежные детали 120 размещены в соответствующих прорезях или пазах 116, выполненных в корпусе 404 камеры. На Фиг.17 представлен вид снизу в перспективе примера осуществления временно устанавливаемого медицинского устройства, изображенного на Фиг.12, с крепежными деталями, находящимися в выведенном, или рабочем, положении, выступающими из соответствующих прорезей. В представленном примере осуществления изобретения временно устанавливаемая камера 102 изображена с крепежными деталями, находящимися в выведенном, или рабочем, положении и выступающими из соответствующих прорезей 116. Поворот манипулятора 136 крепежных деталей приводит к перемещению крепежных деталей 120 из отведенного положения в рабочее положение.
На Фиг.18-21 представлен ряд изображений, иллюстрирующих функционирование примера осуществления манипулятора 136 крепежных деталей, а также пример осуществления множества крепежных деталей 120. Следует понимать, что функционирование одной из крепежных деталей 120 может быть аналогично функционированию остальных крепежных деталей 120, которые в одном из примеров осуществления изобретения одновременно перемещаются из рабочего положения в нерабочее положение.
На Фиг.18 представлен вид в разрезе примера осуществления крепежной детали в полностью отведенном, нерабочем, положении, в котором крепежная деталь полностью размещена в прорези таким образом, что острый конец не выступает. В представленном примере осуществления изобретения манипулятор 136 крепежных деталей обеспечивает нахождение крепежной детали 120 в полностью отведенном, нерабочем, положении, в котором крепежная деталь полностью размещена в прорези 116 таким образом, что острый конец 432 крепежной детали 120 не выступает. Указанное положение исключает случайный укол врача-клинициста острым концом 432 крепежной детали 120 или прокалывание какого-либо объекта на этапе установки. Как показано на фигуре, манипулятор 136 крепежных деталей повернут против часовой стрелки на полный угол, обеспечиваемый вырезами 422 и планками 420. В данном положении ряд выступающих ребер 420b расположен в направлении по часовой стрелке относительно второго ряда фиксирующих ребер 422b. Первые концы 412a тяг 412 перемещаются манипулятором 136 крепежных деталей и располагаются на расстоянии в соответствии с положением крепежных деталей 120. Вторые концы 412b размещены в вырезах, или пазах, 434 крепежных деталей 120.
Для приведения в действие механизма крепления встроенный манипулятор 136 крепежных деталей поворачивают в направлении приведения в рабочее положение, которое в указанном примере осуществления изобретения представлено направлением по часовой стрелке (для приведения в действие механизма крепления можно предусмотреть использование любого приемлемого направления), а первое выступающее ребро 420b проходит мимо второго фиксирующего ребра 422b, что в дополнение к тактильному сигналу, который чувствует врач-клиницист, может привести к возникновению звукового сигнала. Второй конец 412b тяги 412 в процессе приведения в действие механизма крепления свободно перемещается в пазу 434, по мере того, как усилие, обеспечивающее поворот крепежной детали 120 в выведенное рабочее положение, передается на крепежную деталь 120 в процессе взаимодействия между криволинейной поверхностью 436 крепежной детали 120 и приводной криволинейной поверхностью 438 манипулятора 136 крепежных деталей. По мере поворота манипулятора 136 в направлении по часовой стрелке приводная криволинейная поверхность 438 соприкасается с криволинейной поверхностью 436 и воздействует на нее, обеспечивая поворот крепежной детали 120 вокруг осевой шпильки 414. Большая часть усилия, прикладываемого приводной криволинейной поверхностью 438, действует на криволинейную поверхность 436 крепежной детали по касательной со смещением относительно центра осевой шпильки 414, что приводит к повороту крепежной детали 120. В процессе приведения в действие механизма крепления конец 412b тяги 412 свободно перемещается в пазу 434, не передавая усилия для перемещения крепежной детали 120.
Как видно из Фиг.18, когда крепежные детали 120 достигают полностью отведенного положения, конец 432 крепежной детали может полностью размещаться в пазу, или прорези, 116. Дальнейшему повороту манипулятора 136 крепежных деталей препятствует тяга 412, дальнейшему перемещению которой, в свою очередь, препятствует крепежная деталь 120.
На Фиг.19 представлен вид в разрезе примера осуществления крепежной детали, повернутой примерно на половину угла поворота, что составляет примерно 90 градусов, в результате поворота манипулятора в направлении по часовой стрелке. В представленном примере осуществления изобретения крепежная деталь 120 повернута примерно на половину угла поворота, что составляет примерно 90 градусов, в результате поворота манипулятора 136 в направлении по часовой стрелке. По мере поворота манипулятора 136 крепежных деталей в направлении по часовой стрелке сила взаимодействия между криволинейной поверхностью 438 манипулятора и криволинейной поверхностью 436 крепежной детали вызывает незначительное перемещение вверх манипулятора 136 крепежных деталей, обеспечиваемое допусками компонентов. При дальнейшем повороте манипулятора 136 крепежных деталей в направлении по часовой стрелке из положения, представленного на Фиг.19, криволинейная поверхность 438 манипулятора продолжает соприкасаться с криволинейной поверхностью 436 крепежной детали и нажимать на нее, что обеспечивает дальнейший поворот крепежной детали 120 в направлении против часовой стрелки.
На Фиг.20 представлен вид в разрезе примера осуществления манипулятора крепежных деталей, повернутого в направлении по часовой стрелке на полный угол поворота, причем выступающее ребро проходит за фиксирующее ребро. В представленном примере осуществления изобретения манипулятор 136 крепежных деталей повернут в направлении по часовой стрелке на полный угол поворота, причем выступающее ребро 420b проходит за фиксирующее ребро 422a. В данном положении крепежная деталь 120 повернута на полный угол поворота, который в представленном примере осуществления изобретения составляет почти 180 градусов, причем конец 432 находится в прорези 116. В этом положении криволинейная поверхность 438 манипулятора находится над центром поворота, и манипулятор 136 крепежных деталей не перемещается в обратном направлении под воздействием усилия, приложенного к крепежной детали 120 и стремящегося возвратить крепежную деталь в нерабочее положение, поскольку криволинейная поверхность 436 воздействует на криволинейную поверхность 438 манипулятора, так что манипулятор 136 движется в направлении смещения вверх, а не в направлении поворота манипулятора 136. Дистальный конец крепежной детали 120 по существу представлен в виде стержня, имеющего прямоугольное сечение с конусообразным сужением по длине, обеспечивающим получение острого конца 432. При повороте крепежной детали 120 примерно на 180 градусов в полностью выведенное рабочее положение силы, приложенные к крепежным деталям 120, воздействуют в направлении оси поворота, представленной осевой шпилькой 414, и не приводят к повороту крепежной детали 120. Очевидно, что хотя осевая шпилька 414 представлена как отдельная деталь относительно крепежной детали 120, эти два элемента могут представлять собой цельную или даже единую конструкцию.
Если требуется отвести крепежные детали 120, чтобы снять или переместить временно устанавливаемое медицинское устройство (например, камеру 102 в представленном примере осуществления изобретения), следует повернуть манипулятор 136 крепежных деталей в нерабочее положение, то есть в представленном примере осуществления изобретения в направлении против часовой стрелки. Из положения манипулятора 136 крепежных деталей, представленного на Фиг.20, манипулятор 136 поворачивается в направлении против часовой стрелки, причем криволинейная поверхность 438 манипулятора скользит по криволинейной поверхности 436, не приводя к повороту крепежной детали 120. В представленном примере осуществления изобретения продолжение поворота манипулятора 136 крепежных деталей в направлении против часовой стрелки приводит к выходу криволинейной поверхности 438 из соприкосновения с криволинейной поверхностью 436, в процессе которого не возникает существенное усилие, стремящееся повернуть крепежную деталь 120, до достижения вторым концом 412b тяги 412 одного из крайних положений паза 434, в котором тяга 412 прикладывает тянущее усилие к пазу 434, обеспечивая поворот и отведение крепежной детали 120.
На Фиг.21 представлен вид в разрезе примера осуществления манипулятора 136 крепежных деталей, повернутого в направлении против часовой стрелки по сравнению с положением, указанным на Фиг.20, с соответствующим поворотом крепежной детали примерно на половину полного угла поворота. Как видно при сравнении Фиг.20 и Фиг.21, манипулятор 136 крепежных деталей находится в различных положениях в зависимости от перехода механизма крепления в рабочее или нерабочее (отведенное) положение, причем крепежная деталь 120 остается в соответствующем положении. Это обусловлено отсутствием перемещения, когда тяга 412 осуществляет тянущее воздействие в вырезе 434, в сравнении с непосредственным нажатием криволинейной поверхности 438 манипулятора на криволинейную поверхность 436. Для полного отведения крепежных деталей 120 манипулятор 136 крепежных деталей поворачивается до защелкивания выступающего ребра 420b после прохождения фиксирующего ребра 422b.
На Фиг.22 представлен вид сверху примера осуществления временно устанавливаемого медицинского устройства, причем манипулятор не показан для иллюстрации положения тяг при нахождении крепежных деталей в отведенном положении. В представленном примере осуществления изобретения временно устанавливаемая камера 102 изображена без манипулятора 136 крепежных деталей для иллюстрации положения тяг 412 при нахождении крепежных деталей 120 в отведенном положении. На Фиг.23 представлен вид сверху примера осуществления временно устанавливаемого медицинского устройства, причем манипулятор не показан для иллюстрации положения тяг при нахождении крепежных деталей в выведенном (рабочем) положении. В представленном примере осуществления изобретения временно устанавливаемая камера 102 изображена без манипулятора 136 крепежных деталей для иллюстрации положения тяг 412 при нахождении крепежных деталей 120 в выведенном (рабочем) положении. Тяги 412 указаны в их фактическом положении при нахождении механизма крепления в рабочем и нерабочем положении, когда первые концы 412a удерживаются манипулятором 136 крепежных деталей.
Как указывалось ранее, механизм крепления можно привести в действие посредством установки в отверстия 122 инструментов, имеющихся на рынке, или специального установочного приспособления. На Фиг.24 представлен вид в перспективе примера осуществления установочной ручки и установочного приспособления, предназначенных для размещения, закрепления, снятия крепления, извлечения или изменения положения временно устанавливаемого медицинского устройства при помощи гибкого вала. В представленном примере осуществления изобретения установочная ручка 108 и установочное приспособление 106 предназначены для размещения, закрепления, снятия крепления, извлечения или изменения положения временно устанавливаемой камеры 102 при помощи гибкого вала 104. Однако очевидно, что практические аспекты осуществления установочной ручки 108 не ограничиваются конкретным примером, представленным в настоящем документе. Установочная ручка 108 может использоваться для установки любого временно устанавливаемого или имплантируемого медицинского устройства, описанного в настоящем документе, включая, среди прочих, камеры с обзором в прямом и обратном направлении, зажимы для ретракции ткани, зажимы, фиксаторы эндоскопа, устройства распределения питания, расширители, ритмоводители, сосудистые порты, катетеры (такие как катетеры, используемые с желудочными бандажами), а также водители ритма желудка, причем некоторые из указанных устройств, в частности, описаны далее со ссылкой на Фиг.32-37.
Как указано на Фиг.24, установочная ручка 108, установочное приспособление 106 и гибкий вал 104 предназначены для установки в теле пациента камеры 102 по настоящему изобретению с использованием гибкого эндоскопа. В представленном примере осуществления изобретения установочная ручка 108 содержит корпус 109, футляр 114 камеры, пусковой элемент 110 и кнопку блокировки 112. Как указано далее, камера 102 может устанавливаться в футляре 114 камеры с размещением выступающих наружу элементов 124a, 124b в соответствующих центровочных вырезах 446, 448. Футляр 114 камеры расположен под углом к корпусу 109, что обеспечивает упрощение установки и улучшение визуального контроля камеры 102 в процессе установки. В представленном примере осуществления изобретения указанный угол равен 20 градусам, а длина вала, составляющего часть корпуса 109, равна примерно 10 см.
Пусковой элемент 110 может содержать визуальный указатель индикации нахождения пускового элемента 110 в нерабочем состоянии, представляющий собой изображение 530 незакрытого замка, и указатель индикации нахождения пускового элемента 110 в рабочем положении, который представлен изображением 532 закрытого замка. Указанная визуальная индикация может быть предусмотрена любым приемлемым способом, таким как штамповка в процессе изготовления пускового элемента 110, наклейка с использованием клейкой ленты или аналогичного материала либо печать непосредственно на пусковом элементе 110. Изображение незакрытого замка на элементе 110 может размещаться вблизи от верхней кромки корпуса 109, хотя могут быть использованы также другие способы указания состояния, такие как окно или элементы корпуса 109, предусмотренные для индикации состояния.
На Фиг.25 представлено изображение в разобранном перспективном виде примера осуществления установочной ручки, установочного приспособления и гибкого вала, изображенных на Фиг.24. В представленном примере осуществления изобретения корпус 109 включает в себя первую и вторую половины 109a, 109b, которые соединены друг с другом и содержат внутренние компоненты. За исключением установочных штифтов 452, осевых шпилек 450 и посадочных кромок, первая и вторая половины 109a, 109b являются по существу подобными друг другу. Установочные штифты 452, выступающие из первой половины 109a корпуса, входят в соответствующие отверстия (не показаны) второй половины 109b корпуса. Соединение множества установочных штифтов 452 в отверстиях является достаточным для крепления первой и второй половин 109a, 109b корпуса между собой. В другом примере осуществления изобретения штифты 452 расположены на второй половине 109b корпуса, а отверстия предусмотрены в первой половине 109a корпуса. Для сборки и крепления первой и второй половин 109a, 109b корпуса между собой может использоваться любая приемлемая конструкция.
Пусковой элемент 110 включает в себя первую и вторую половины 110a, 110b. Фиксирующие штифты 454, выступающие из первой половины 110a пускового элемента, входят в соответствующие отверстия (не показаны), предусмотренные на второй половине 110b пускового элемента. В другом примере осуществления изобретения штифты 454 могут быть расположены на второй половине 110b пускового элемента, а отверстия - в первой половине 110a пускового элемента. Для сборки и крепления первой и второй половин 110a, 110b пускового элемента между собой может использоваться любая приемлемая конструкция. Вторая половина 109b корпуса содержит осевую шпильку 450, проходящую через первое и второе опорные отверстия 456a, 456b и вставленную в отверстие 450, на которой с возможностью вращения закреплен один конец пускового элемента 110. Первая половина 109a корпуса содержит осевую шпильку 444, на которой с возможностью вращения закреплен предохранитель 112. Первая и вторая половины 109a, 109b корпуса, футляр 114 камеры, первая и вторая половины 110a, 110b пускового элемента и предохранитель 112 могут изготавливаться из биологически совместимого материала, такого как поликарбонат. Предохранитель 112 поворачивается вокруг осевой шпильки 444, отводя фиксирующую планку 194 из нижнего отверстия 536, что обеспечивает возможность поворота пускового элемента 110 вокруг осевой шпильки 414. Это приводит к перемещению поперечного элемента 474 вниз по криволинейной рабочей поверхности 486, обеспечивая вращение приводного вала 460 кулачковой втулкой 472, в результате чего осуществляется поворот исполнительного механизма 468 относительно футляра 114 камеры. Поворот исполнительного механизма 468 приводит в действие манипулятор 136 крепежных деталей посредством его поворота. Взаимодействие между выступающими наружу элементами 124a, 124b и соответствующими вырезами 446, 448 препятствует повороту корпуса 404 камеры, обеспечивая возможность относительного перемещения между манипулятором 136 и корпусом 404 камеры.
На Фиг.26 представлен вид сбоку примера осуществления установочной ручки, установочного приспособления и гибкого вала, изображенных на Фиг.24, причем одна из двух половин корпуса не показана для иллюстрации внутренних компонентов в нерабочем (не приведенном в действие) положении. На Фиг.27 представлен вид сбоку примера осуществления установочной ручки, установочного приспособления и гибкого вала, изображенных на Фиг.24, причем одна из двух половин корпуса не показана для иллюстрации внутренних компонентов в рабочем (приведенном в действие) положении. На Фиг.28 представлен вид сбоку в увеличенном масштабе детали примера осуществления кулачкового механизма, входящего в состав установочной ручки, изображенной на Фиг.24, и предназначенного для преобразования поступательного движения во вращательное движение. Как указано на Фиг.25-28, установочная ручка 108 содержит кулачок 458, приводной вал 460 для обеспечения связи с гибким валом 104, штифт 462 приводного вала, возвратную пружину 464 кулачка, предохранительную нажимную пружину 466 и исполнительный механизм 468, связанный с манипулятором 136 крепежных деталей. Исполнительный механизм 468 предназначен для приведения в действие и отключения механизма крепления камеры 102 посредством поворота манипулятора 136 крепежных деталей. Кулачок 458 включает себя вал 470 и кулачковую втулку 472. Верхний конец вала 470 имеет Т-образную форму с поперечным элементом 474. Кулачковая втулка 472 является пустотелой и имеет две находящиеся на определенном расстоянии соответствующие рабочие поверхности 476a, 476b (см. Фиг.28), выполненные на противоположных сторонах кулачковой втулки 472. Верхний конец 460a приводного вала 460 частично размещен во внутреннем пространстве кулачковой втулки 472 и закреплен в данном положении штифтом 462 приводного вала. Штифт 462 приводного вала имеет размеры, обеспечивающие размещение концов штифта в пределах соответствующих рабочих поверхностей 476a, 476b. Длина втулки обеспечивает возможность возвратно-поступательного перемещения верхнего конца 460a в пределах внутреннего пространства втулки, причем рабочие поверхности 476a, 476b обеспечивают вращение приводного вала 460 в результате движения штифта 462 приводного вала в процессе возвратно-поступательного перемещения. Кулачок 458, приводной вал 460 и исполнительный механизм 468 могут изготавливаться из соответствующего материала, имеющего достаточную жесткость и прочность. В представленном примере осуществления изобретения кулачок 458 и исполнительный механизм 468 изготовлены из жидкокристаллического полимера (ЖКП), такого как VECTRATM, а приводной вал 460 выполнен из сополимера полифениленэфира и полистирола (ПФЭ/ПС), такого как NORYLTM. Штифт 462 приводного вала и возвратная пружина 464 кулачка могут быть изготовлены из любого приемлемого материала, такого как нержавеющая сталь.
Кулачок 458 закреплен между первым и вторым элементами 109a, 109b корпуса и в одном из примеров осуществления изобретения может совершать возвратно-поступательное движение. В кулачковой втулке 472 предусмотрены расположенные на определенном расстоянии друг от друга, имеющие в целом плоскую поверхность каналы 478a, 478b, в которых выполнены рабочие поверхности 476a, 476b. Поверхности 476a, 476b размещены между направляющими стенками 480a, 480b, предусмотренными в первом и втором элементах 109a, 109b корпуса. Кулачковая втулка 472 дополнительно содержит расположенные на противоположных сторонах профили 482a, 482b (не показаны), которые перемещаются в процессе осевого возвратно-поступательного движения по направляющим 484a, 484b (не показаны), предусмотренным в первом и втором элементах 109a и 109b корпуса соответственно. Верхний конец вала 470 и поперечный элемент 474 размещены между первой и второй половинами 110a, 110b пускового элемента. Первая и вторая половины 110a, 110b пускового элемента содержат криволинейную рабочую поверхность 486, определенную расположенными на определенном расстоянии стенками 486a, 486b, проходящими от внутренних поверхностей первой и второй половин 110a, 110b пускового элемента. Криволинейная рабочая поверхность 486 предназначена для размещения на ней и перемещения поперечного элемента 474 по мере выполнения поворота пускового элемента 110 вокруг шпильки 450, в результате чего кулачок 458 линейно перемещается в корпусе 109 в направлении вниз.
Приводной вал 460 содержит кольцо 488, которое размещено в пазах 490a, 490b (не показан), предусмотренных на первой и второй половинах 109a, 109b корпуса соответственно. Пазы 490a, 490b обеспечивают крепление приводного вала 460 с возможностью вращения. Приводной вал 460 и кулачок 458 являются в целом центрированными и размещенными соосно, определяя ось вала, входящего в состав корпуса 109. По мере перемещения кулачка 458 в направлении вниз штифт 462 приводного вала перемещается по рабочим поверхностям 476a и 476b, вызывая поворот приводного вала 460, и таким образом осуществляется преобразование поступательного движения во вращательное. Возвратная пружина 464 кулачка обеспечивает приложение номинального усилия возврата к кулачковой втулке 472.
Вал 104 закреплен множеством ребер 492, предусмотренных на первой и второй половинах 109a, 109b корпуса и обеспечивающих возможность изгиба вала 104 и передачи вращательного движения на исполнительный механизм 468, который может быть размещен под углом относительно части вала, находящейся в корпусе 109. Вал 104 может изготавливаться из соответствующего биологически совместимого материала, такого как нержавеющая сталь. В представленном примере осуществления изобретения вал 104 имеет многожильную конструкцию с центральной жилой, на которую навито несколько слоев проводов. Первый и второй концы 104a, 104b вала 104 могут быть соединены с концом 460b и исполнительным механизмом 468 соответственно любым приемлемым способом, обеспечивающим достаточное ограничение люфта при повороте с целью исключения или минимизации потерь вращательного перемещения. В представленном примере осуществления изобретения первый конец 104a вала 104 запрессован в конец 460b, а второй конец 104b способом тугой посадки связан с исполнительным механизмом 468. В другом примере осуществления первый конец 104a может быть связан способом тугой посадки с концом 460b, а второй конец 104b запрессован в исполнительный механизм 468, причем оба конца могут быть запрессованы или связаны способом тугой посадки с соответствующим изменением конструкции футляра 114 камеры для обеспечения монтажа компонентов.
На Фиг.29 представлен вид в перспективе в увеличенном масштабе примера осуществления футляра камеры, представляющего собой часть установочного приспособления, изображенного на Фиг.24. Как представлено на Фиг.25-29, исполнительный механизм 468 включает в себя элемент 494 в форме диска и вал 496, проходящий в направлении вверх от указанного элемента. Верхний конец вала 496 включает в себя два направленных наружу выступа 498a, 498b. Футляр 114 камеры содержит втулку 504, для которой предусмотрено сквозное отверстие 506. Отверстие 506 имеет форму, обеспечивающую установку и крепление с возможностью поворота вала 496, и включает в себя два направленных наружу дугообразных выреза 508a, 508b, предназначенных для размещения в них выступов 498a, 498b, что обеспечивает установку втулки 504 в отверстие 506. Длина вала 496 и втулки 504 подобрана таким образом, что выступы 498a, 498b размещаются над верхней поверхностью 504a втулки 504, что обеспечивает возможность поворота исполнительного механизма 468 при сохранении осевой ориентации относительно втулки 504. Ограничители 510, 510b выступают в направлении вверх над верхней поверхностью 504a, ограничивая угол поворота исполнительного механизма 468. Отверстие 506 определяет центральную ось футляра 114 камеры, вокруг которой осуществляется поворот исполнительного механизма 468. Центральная ось футляра 114 камеры, как указано ранее, направлена под углом к оси вала, расположенного в пределах корпуса 109. Втулка 504 содержит два направленных в противоположные стороны выступа 512a, 512b, обеспечивающих крепление манипулятора 136 к корпусу 109 и предотвращение его вращения.
На Фиг.30 представлен вид в перспективе снизу в увеличенном масштабе примера осуществления футляра камеры и исполнительного механизма, входящего в состав установочного приспособления, представленных на Фиг.24. На Фиг.31 представлен частичный вид в разрезе примера осуществления футляра камеры, входящего в состав установочного приспособления, изображенного на Фиг.24. Как указано на Фиг.25-31, элемент 494 в форме диска исполнительного механизма 468 размещен в футляре 114 камеры. Исполнительный механизм 468 включает в себя две расположенные на определенном расстоянии стойки 516a, 516b, размещенные вблизи контура 494a элемента 494. Стойки 516a, 516b выполнены в форме, соответствующей отверстиям 122. В представленном примере осуществления изобретения дистальные концы стоек 516a, 516b имеют клиновидную форму для упрощения установки стоек 516a, 516b в отверстия 122. Для обеспечения разъемного соединения между исполнительным механизмом 468 и манипулятором 136 крепежных деталей, обеспечивающего приведение в действие манипулятора 136, можно использовать любую приемлемую конструкцию.
Элемент 494 в форме диска также содержит два элемента 518a, 518b, расположенных на определенном расстоянии друг от друга и имеющих криволинейные поверхности, которые выступают в направлении наружу и вверх относительно контура 494a элемента 494. На Фиг.31 представлен вид в разрезе элемента 518a с криволинейной поверхностью, причем сечение выполнено вблизи нижней поверхности элемента 494. Элементы 518a, 518b с криволинейной поверхностью содержат расширяющиеся участки 520a, 520b, которые проходят от контура 494a до соответствующих поверхностей 522a, 522b. Поверхности 522a, 522b выполнены в форме дуги и в представленном примере осуществления изобретения в целом имеют постоянный радиус.
В представленном примере осуществления изобретения футляр 114 камеры включает в себя две консоли 524a, 524b, каждая из которых содержит ребра 528a, 528b соответственно. Для ясности на Фиг.31 представлен вид в разрезе консоли 524a с сечением, выполненным по ребру 528a, на таком же уровне, как сечение элемента 518a с криволинейной поверхностью. На дистальных концах консоли 524a, 524b содержат соответствующие направленные внутрь планки 528a, 528b. Планки 528a, 528b имеют форму, соответствующую вырезам 130a, 130b в корпусе 404 камеры, и предназначены для сцепления с уступами 134a, 134b, когда камера 102 закреплена в футляре 114.
В представленном примере осуществления изобретения в нерабочем состоянии стойки 516a, 516b являются в целом совмещенными с консолями 524a, 524b, соответственно, хотя стойки 516a, 516b могут находиться в любом положении, соответствующем функционированию манипулятора 136, которое в представленном примере осуществления изобретения определяется положением отверстий 122a, 122b. При нажатии пускового элемента 110 исполнительный механизм 468 поворачивается (против часовой стрелки при рассмотрении снизу в представленном примере осуществления изобретения), обеспечивая перемещение элементов 518a, 518b с криволинейными поверхностями, таким образом, что расширяющиеся участки 520a, 520b взаимодействуют с ребрами 528a, 528b соответственно, отклоняя консоли 524a, 524b наружу. Когда поверхности 522a, 522b соприкасаются с ребрами 528a, 528b, консоли 524a, 524b отклоняются на расстояние, достаточное для перемещения планок 528a, 528b в положение, в котором они не достигают прорезей 116 или контактных уступов 130, в результате чего камера 102 отделяется от футляра 114.
На Фиг.32 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего средства формирования изображения при обзоре в прямом и обратном направлении. В одном примере осуществления изобретения временно устанавливаемое медицинское устройство содержит систему приема данных изображений, предназначенную для формирования изображений анатомической структуры пациента в режиме обзора в обратном направлении, указанном стрелкой «A», и в режиме обзора в прямом направлении, указанном стрелкой «B». Режим обзора в прямом направлении, указанном стрелкой «B», используется на этапах доставки и установки временно устанавливаемого медицинского устройства. Режим обзора в обратном направлении, указанном стрелкой «A», используется для формирования изображений, когда временно устанавливаемое медицинское устройство прикреплено к элементам анатомической структуры тела пациента. В одном примере осуществления изобретения временно устанавливаемая система формирования изображения содержит временно устанавливаемое устройство, которое установлено с использованием малоинвазивных хирургических процедур (например, эндоскопических, лапароскопических, торакоскопических или любых комбинаций указанных процедур).
В примере осуществления изобретения, представленном на Фиг.32, система 600 установки камеры содержит временно устанавливаемую камеру 602, вал 604, установочное приспособление 606 и установочную ручку 608. В одном примере осуществления изобретения вал 604 является гибким, шарнирно сочлененным или трубчатым. Вал 604 может быть аналогичным валу 114, описанному ранее. Перед установкой камеру 602 размещают в установочном приспособлении 606. Камера 602 содержит устройство формирования изображения 639, предназначенное для приема оптических сигналов и преобразования данных изображений в электрические сигналы, которые могут быть записаны на электронном носителе или переданы на внешние устройства с целью отображения в реальном времени. Электрические сигналы передаются по проводникам или с использованием беспроводной системы. Перед введением камеры 602 в эндоскопический троакар эндоскопист (например, врач-клиницист, лечащий врач или хирург) прикрепляет установочное приспособление 606 с размещенной в нем камерой 602 к валу 604. Далее камера 602 при помощи эндоскопического троакара устанавливается в требуемом месте анатомической структуры тела пациента (например, в зоне операционного действия) с использованием крепежных деталей, предусмотренных в камере 602. Однако примеры осуществления изобретения не ограничены применением в данной области, поскольку для доставки камеры 602 к месту установки могут использоваться другие способы.
В одном примере осуществления изобретения установочное приспособление 606 имеет конструкцию, обеспечивающую размещение в нем камеры 102 и соединение с установочной ручкой 608 при помощи вала 604. Вал 604 является гибким и пригодным для перемещения установочного приспособления 606 и камеры 602, например, через внутренний рабочий канал гибкого эндоскопа. Установочная ручка 608 связана с камерой 602 через установочное приспособление 606. Камеру 602 предварительно размещают в установочном приспособлении 606, и ее установка в теле пациента осуществляется при помощи троакара с использованием гибкого эндоскопа. Камера 602 может содержать механизм крепления, обеспечивающий крепление камеры 602 к ткани в требуемом месте.
В одном примере осуществления изобретения камера 602 содержит первый объектив 638a. Первый объектив 638a представляет собой оптическую линзу или систему линз, оптически связанную с устройством формирования изображения 639, находящимся в элементе корпуса 635 камеры 602. Первый объектив 638a подает на устройство формирования изображения 639 оптический сигнал с обратного направления, указанного стрелкой «A», когда камера 602 находится на месте установки. Камера 602 дополнительно содержит один или большее число источников света 640a, 640b для подсветки участка, изображение которого требуется сформировать.
Футляр 614 камеры, имеющий соответствующую конструкцию, содержит камеру 602 и на этапах доставки и установки обеспечивает возможность обзора в прямом направлении, указанном стрелкой «B». В одном примере осуществления изобретения футляр 614 камеры содержит оптический канал 654, двустороннее зеркало 652 и второй объектив 638b, образующий канал подсветки/оптический канал 650. Двустороннее зеркало 652 может представлять собой полупосеребренное зеркало или расщепитель луча, обеспечивающий отражение части светового потока и прохождение остальной части светового потока. Когда футляр 614 связан с камерой 602, световой поток от источника подсветки 640b отражается двусторонним зеркалом 652 и направляется по оптическому каналу 654 с целью формирования луча 656 подсветки в направлении, указанном стрелкой «B», что обеспечивает подсветку в прямом направлении на этапах доставки и установки камеры 602. Отраженное оптическое изображение 658 проходит через второй объектив 638b, направляется по оптическому каналу 654 и поступает на часть устройства формирования изображения 639 через канал подсветки/оптический канал 654. Это обеспечивает получение изображений с низким разрешением на этапе выполнения установки камеры 602. В одном примере осуществления изобретения устройство формирования изображения 639 содержит одно или большее число устройств ПЗС или КМОП, таких как КМОП-матрицы, предназначенных для приема оптического сигнала и преобразования изображений 658 в электрические сигналы.
На Фиг.33 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего зажим для ретракции ткани. В представленном примере осуществления изобретения временно устанавливаемое медицинское устройство 700 содержит установочное приспособление 704. Первый конец установочного приспособления 704 включает в себя элемент 718 крепления, предназначенный для крепления зажима для ретракции ткани 708. Второй конец установочного приспособления 704 содержит одну или большее число крепежных деталей 706, предназначенных для проникновения сквозь ткань 702 и прикрепления к ней временно устанавливаемого медицинского устройства 700. В одном примере осуществления изобретения крепежные детали 706 являются подобными ранее описанным крепежным деталям 120 и могут быть использованы для проникновения сквозь ткань 702 аналогичным образом. Зажим для ретракции ткани 708 может использоваться для захвата ткани 710 между первой и второй браншами 712a, 712b, поворачивающимися вокруг оси 714. Бранши 712a, 712b могут открываться и закрываться в результате перемещения гильзы 716 в направлениях, указанных стрелкой «C».
На Фиг.34 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего зажим для тканей. В представленном примере осуществления изобретения временно устанавливаемое медицинское устройство 720 содержит установочное приспособление 704. Первый конец установочного приспособления 704 включает в себя элемент 718 крепления, предназначенный для крепления зажима 722. Второй конец установочного приспособления 704 содержит одну или большее число крепежных деталей 706, предназначенных для проникновения сквозь ткань 702 и прикрепления к ней временно устанавливаемого медицинского устройства 720. Зажим 722 для тканей может использоваться для захвата ткани 728 между первой и второй браншами 724a, 724b, поворачивающимися вокруг оси 726. Бранши 724a, 724b могут открываться и закрываться в результате перемещения гильзы 716 в направлениях, указанных стрелкой «C».
На Фиг.35 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего фиксирующий зажим. В представленном примере осуществления изобретения временно устанавливаемое медицинское устройство 730 содержит установочное приспособление 704. Первый конец установочного приспособления 704 включает в себя элемент 718 крепления, предназначенный для крепления фиксирующего зажима 734. Второй конец установочного приспособления 704 содержит одну или большее число крепежных деталей 706, предназначенных для проникновения сквозь ткань 702 и прикрепления к ней фиксирующего зажима 734. Фиксирующий зажим 732 может использоваться для захвата и фиксации гибкой части эндоскопа 734.
На Фиг.36 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего устройство распределения питания, источник подсветки и камеру. В представленном примере осуществления изобретения первое установочное приспособление 742a содержит устройство 744 распределения питания. Первый конец первого установочного приспособления 742a предназначен для крепления устройства 744 распределения питания, а второй конец обеспечивает проникновение одной или большего числа крепежных деталей 706 сквозь ткань 702 для крепления устройства 744 распределения питания к ткани 702. Второе установочное приспособление 742b включает в себя источник подсветки 746 и камеру 748. Первый конец второго установочного приспособления 742b предназначен для крепления источника подсветки 746 и камеры 748, а второй конец обеспечивает проникновение одной или большего числа крепежных деталей 706 сквозь ткань 702 для крепления источника подсветки 746 и камеры 748 к ткани 702.
Устройство 744 распределения питания включает в себя один или большее число источников питания V1, V2, Vn, где n - произвольное положительное число. Источники питания V1, V2, Vn могут быть электрически связаны с источником подсветки 746, камерой 748 или любым другим электрическим устройством. Источники питания V1-Vn обеспечивают подачу требуемого напряжения питания. В одном примере осуществления изобретения источник V1 питания обеспечивает подачу на камеру 748 напряжения, составляющего примерно +12 В, а источник Vn подает на источник подсветки 746 напряжение, составляющее примерно +1,5 В. Источник питания V2 обеспечивает подачу напряжения примерно +5 В для питания других устройств. В одном примере осуществления изобретения источником подсветки 746 является светодиод. Источник подсветки 746 излучает свет 750 для подсветки требуемого участка анатомической структуры. На объектив 754 камеры поступает оптический сигнал 752, отраженный от подсвеченного участка анатомической структуры.
На Фиг.37 представлен пример осуществления временно устанавливаемого медицинского устройства, содержащего расширитель, предназначенный для создания свободного пространства между слоями ткани. В представленном примере осуществления изобретения временно устанавливаемое медицинское устройство 760 содержит установочное приспособление 704. Первый конец установочного приспособления 704 включает в себя элемент 718 крепления, предназначенный для крепления расширителя 762. Второй конец установочного приспособления 704 содержит одну или большее число крепежных деталей 706, проникающих сквозь ткань 702 для крепления к ней расширителя 762. Расширитель 762 используется, например, для разделения слоев ткани.
На Фиг.38-43 представлена процедура крепления временно устанавливаемого медицинского устройства на брюшную стенку 202 при проведении транслюминальной эндоскопической хирургии через естественные отверстия. Хотя указанная процедура рассмотрена для случая установки камеры 102, аналогичная процедура может применяться для установки других временно устанавливаемых медицинских устройств, описанных в настоящем документе, или временно устанавливаемых медицинских устройств, находящихся в пределах объема изобретения, которые описаны в данном документе. Например, аналогичная процедура может быть использована для установки камеры 105 или других временно устанавливаемых рабочих инструментов, которые вводятся через гибкий рабочий канал эндоскопа, включая, среди прочих, зажимы для ретракции ткани, зажимы для тканей, фиксаторы эндоскопа, устройства распределения питания и/или устройства, обеспечивающие создание свободного пространства между внутренними полостями тела, органами и/или разрезанными участками ткани. Перед установкой камеру 102 фиксируют в установочном приспособлении 106 и вводят в полость 304 желудка при помощи эндоскопического троакара 300, проведенного через пищевод 316. Далее через желудок 302 осуществляется переход в брюшную полость 210 с использованием эндоскопического устройства доступа 306 с применением иглы Вереша (EVN) для проникновения через стенку 314 желудка. В результате прохождения через стенку желудка устройства доступа 306 формируется отверстие 312, которое расширяют при помощи баллона 308. Установочное приспособление 106 и эндоскопический троакар 300 проводят в брюшную полость 210 через дилатированное отверстие 312 в стенке 314 желудка. После приближения дистального конца 318 эндоскопического троакара 300 к брюшной стенке 202 вал 104 выдвигается до соприкосновения установочного приспособления 106 с брюшной стенкой 202. Затем камеру 102 размещают и прикрепляют к брюшной стенке 202 при помощи одной или большего числа крепежных деталей 120, после чего вал 104 отводят через желудок 302 и пищевод 316. Процесс установки камеры 102 более подробно описан далее. В одном примере осуществления изобретения эндоскопический троакар 300 проводится с использованием визуальной обратной связи от камеры 105, содержащей средства обзора в прямом направлении.
На Фиг.38 представлен вид в разрезе желудка, пищевода и брюшной стенки с указанием эндоскопического троакара, введенного в полость желудка через пищевод. В представленном примере осуществления изобретения эндоскопический троакар 300 введен в полость 304 желудка через пищевод 316. На дистальном конце 318 эндоскопического троакара 300, находящегося в полости 304 желудка, закреплено установочное приспособление 106. Камера 102 размещена в установочном приспособлении 106 и предназначена для крепления на брюшной стенке 202. Эндоскопический троакар 300, установочное приспособление 106 и камеру 102 сначала вводят в желудок 302. Эндоскопический троакар 300, установочное приспособление 106 и камера 102 могут быть введены через желудок 302 в зону операционного действия, находящуюся в брюшной полости 210, с использованием хорошо известных эндоскопических способов чрезжелудочного доступа.
На Фиг.39 представлен вид в разрезе желудка, пищевода и брюшной стенки, изображенных на Фиг.38, с указанием устройства доступа, выдвинутого из дистального конца эндоскопического троакара. После введения эндоскопического троакара 300 в полость 304 желудка через пищевод 316 устройство доступа 306 выдвигается через дистальный конец 318 эндоскопического троакара 300. Устройство доступа 306 проводится через рабочий канал гибкого эндоскопа, введенного через эндоскопический троакар 300. Устройство доступа 306 используется для прохождения стенки 314 желудка с целью получения доступа к брюшной полости 210 и выполнения медицинской процедуры в рабочей зоне, находящейся в брюшной полости 210.
На Фиг.40 представлен вид в разрезе желудка, пищевода и брюшной стенки, изображенных на Фиг.39, с указанием дилатационного баллона, установленного в отверстии, образованном в стенке желудка устройством доступа 306. После прохождения устройством доступа 306 стенки 314 желудка и формирования небольшого отверстия 312 в стенке 314 желудка в отверстие 312 вставляют баллон 308, который надувают для дилатации отверстия 312. Отверстие 312 может быть дилатировано до размера, достаточного для прохождения эндоскопического троакара 300. К баллону 308 прикреплен проволочный проводник 310, предназначенный для протягивания баллона 308 через дилатированное отверстие 312 в брюшную полость 210. После этого эндоскопический троакар 300 и установочное приспособление 106 продвигают через дилатированное отверстие 312 в брюшную полость 210.
На Фиг.41 представлен вид в разрезе желудка, пищевода и брюшной стенки, изображенных на Фиг.40, с указанием дистального конца эндоскопического троакара, вставленного через дилатированное отверстие в стенке желудка. Как представлено на Фиг.41, дистальный конец 318 эндоскопического троакара 300 введен в брюшную полость 210 через дилатированное отверстие 312. Эндоскопический троакар 300, установочное приспособление 106 и камеру 102 перемещают в брюшной полости 210 к брюшной стенке 202. Дистальный конец 318 эндоскопического троакара 300 перемещают в направлении брюшной стенки 202 до достижения точки, в которой вал 104 может быть выдвинут наружу в направлении брюшной стенки 202.
На Фиг.42 представлен вид в разрезе желудка, пищевода и брюшной стенки, изображенных на Фиг.41, с указанием гибкого вала и установочного приспособления, выдвинутых из дистального конца эндоскопического троакара. Как представлено на Фиг.42, вал 104 выдвинут из дистального конца 318 эндоскопического троакара 300 до соприкосновения установочного приспособления 316 с брюшной стенкой 202. После соприкосновения установочного приспособления 106 и камеры 102 с брюшной стенкой 202 приводится в действие установочная ручка 108 для обеспечения установки крепежных деталей 120 и крепления камеры 102 к брюшной стенке 202.
На Фиг.43 представлен вид в разрезе желудка, пищевода и брюшной стенки, изображенных на Фиг.42, с указанием примера осуществления временно устанавливаемого медицинского устройства, прикрепленного к брюшной стенке. В представленном примере осуществления изобретения камера 102 установлена в требуемом месте и прикреплена к брюшной стенке 202. После размещения камеры 102 в требуемом положении одна или большее число крепежных деталей 120 перемещаются по круговой траектории из нерабочего положения в рабочее положение для прикрепления к ткани. Крепежные детали 120 обеспечивают крепление камеры 102 к ткани с прочностью, равной прочности шва или превосходящей его. Проникновение крепежных деталей 120 в ткань брюшной стенки 202 обеспечивает крепление камеры 102 к брюшной стенке. После крепления камеры 102 к брюшной стенке 202 вал 104 выводят из тела пациента через брюшную полость 210, отверстие 312, желудок 302 и пищевод 316. После крепления камеры 102 к брюшной стенке 202 камера 102 обеспечивает предоставление изображения анатомических структур брюшной полости 210, требуемого для целей проведения хирургического вмешательства.
Как указано на Фиг.25-31, механизм крепления имеет реверсивную конструкцию, так что временно устанавливаемое медицинское устройство, например камеру 102, можно перемещать для изменения места установки или извлечения из тела пациента. Для выполнения этого при нахождении пускового элемента 110 в рабочем положении футляр 114 камеры размещают над камерой 102, причем выступающие наружу элементы 124a, 124b устанавливают в соответствующие вырезы 446, 448, в результате чего стойки 516a, 516b входят в пазы 122. Предохранитель 112 поворачивают для извлечения фиксирующей пластины 534 из верхнего отверстия 538, и одновременно врач-клиницист оттягивает выступ 540 пускового элемента 110 в направлении вверх. Хотя возвратная пружина 464 стремится сместить кулачковую втулку 472 в направлении вверх, воздействие на выступ 540 обеспечивает приложение дополнительного усилия в этом направлении. По мере того, как поперечный элемент 474 отводится вверх рабочей поверхностью 486, исполнительный механизм 468 обеспечивает поворот манипулятора 136, одновременно перемещая крепежные детали 120 из рабочего положения в нерабочее положение. В то же время элементы 518a, 518b с криволинейной поверхностью отделяются от ребер 528a, 528b, обеспечивая сцепление выступов 188a, 188b с выемкой 130 и уступом 130a для обеспечения фиксации камеры 102 в футляре 114. После перемещения пускового элемента 110 в нерабочее положение фиксирующая пластина 534 защелкивается в нижнем отверстии 536, издавая звуковой сигнал, указывающий, что пусковой элемент 110 полностью переведен в нерабочее положение, а камера 102 отделена от ткани тела и ее можно переместить или извлечь.
В целом, использование описанных в данном документе принципов настоящего изобретения обеспечивает получение ряда преимуществ. Указанное выше описание одного или большего числа примеров осуществления изобретения было представлено для целей иллюстрации и описания изобретения. Данное описание не является исчерпывающим или ограниченным конкретными описанными примерами осуществления изобретения. В указанные выше примеры осуществления изобретения могут быть внесены различные изменения и дополнения. Один или большее число примеров осуществления изобретения были отобраны и описаны для иллюстрации принципов и способов практической реализации изобретения с целью обеспечения специалистам в данной области техники возможности применения различных примеров осуществления изобретения, а также внесения изменений, соответствующих конкретной предполагаемой области использования. Полный объем изобретения указан в прилагаемой формуле изобретения.
Временно устанавливаемые устройства, описанные в настоящем документе, могут представлять собой устройства однократного применения или могут быть предназначены для многократного использования. Однако в любом случае после однократного применения временно устанавливаемого устройства возможно провести процедуру подготовки к повторному использованию. Процедура подготовки может предусматривать любую комбинацию этапов демонтажа временно устанавливаемого устройства, после которой выполняется очистка и замена некоторых элементов, а затем сборка. В частности, временно устанавливаемое устройство можно демонтировать и выборочно заменить или удалить любое число конкретных компонентов или деталей устройства в любой комбинации. После очистки и/или замены определенных деталей временно устанавливаемое устройство можно собрать для последующего использования в подразделении, выполняющем процедуру восстановления, или это может осуществить бригада хирургов непосредственно перед проведением хирургического вмешательства. Для специалистов в данной области техники очевидно, что подготовка временно устанавливаемого устройства может проводиться с использованием различных способов разборки, очистки и замены, а также сборки. Использование указанных способов и временно устанавливаемые устройства, для которых проведена процедура восстановления, находятся в пределах объема настоящего изобретения.
Перед выполнением хирургического вмешательства рекомендуется провести обработку различных устройств по настоящему изобретению, описанных в данном документе. Прежде всего, следует получить новое или бывшее в употреблении временно устанавливаемое устройство и провести его очистку, если это необходимо. Далее возможно стерилизовать временно устанавливаемое устройство. В соответствии с одним из способов выполнения стерилизации временно устанавливаемое устройство помещается в закрытую герметичную емкость, такую как пакет из пластика или материала Тайвек (TYVEK®). Далее емкость, в которой находится временно устанавливаемое устройство, подвергается воздействию излучения, которое может проникнуть сквозь материал емкости, такого как рентгеновские лучи или поток электронов высокой энергии. Излучение убивает бактерии, находящиеся на поверхности устройства и в емкости. Для стерилизации временно устанавливаемых устройств перед их применением можно использовать также другие способы, такие как стерилизация газообразной окисью этилена. После этого стерилизованные временно устанавливаемые устройства хранят в стерильном контейнере. Герметичный контейнер обеспечивает стерильность временно устанавливаемого устройства до открытия контейнера в медицинском учреждении.
Рекомендуется стерилизовать временно устанавливаемые устройства. Стерилизацию можно выполнить различными способами, известными специалистам в данной области техники, в том числе с использованием бета- или гамма-излучения, окиси этилена, пара.
В настоящем документе описаны примеры осуществления изобретения, однако в указанные примеры осуществления могут быть внесены различные изменения и дополнения. Например, можно использовать различные рабочие инструменты. Кроме того, для изготовления конкретных компонентов, материал которых был указан в описании, могут быть использованы другие материалы. Представленное выше описание и приложенная формула изобретения охватывают все указанные изменения и дополнения.
Любой патент, публикация или другая информация, которые полностью или частично включены в данный документ посредством ссылки, являются составной частью данного документа в той степени, в которой они не противоречат определениям, положениям и другой информации, представленной в настоящем документе. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям данного документа, которая была включена в указанный документ посредством ссылки. Любой материал или его часть, включенные в настоящий документ посредством ссылки и противоречащие указанным определениям, положениям или другой информации, представленной в настоящем документе, включается в данный документ в той мере, в которой между включенным посредством ссылки материалом и настоящим документом не возникает противоречий.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИЯ С ПОМОЩЬЮ ОПТОВОЛОКОННОГО ДАТЧИКА ДЛЯ ВИЗУАЛИЗАЦИИ И МОНИТОРИНГА СОСУДОВ | 2013 |
|
RU2686954C2 |
| УСТАНОВОЧНОЕ ПРИСПОСОБЛЕНИЕ С ПРЕДОХРАНИТЕЛЕМ ДЛЯ ИМПЛАНТИРУЕМОГО МЕДИЦИНСКОГО УСТРОЙСТВА | 2006 |
|
RU2434583C2 |
| УСТАНОВОЧНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ИМПЛАНТИРУЕМОГО МЕДИЦИНСКОГО УСТРОЙСТВА | 2006 |
|
RU2448666C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО | 2006 |
|
RU2435550C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С УКАЗАТЕЛЕМ | 2006 |
|
RU2435615C2 |
| ИНЪЕКЦИОННЫЙ ПОРТ | 2006 |
|
RU2434650C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С СОЕДИНИТЕЛЬНЫМ МЕХАНИЗМОМ С ОБРАТНЫМ ДЕЙСТВИЕМ И СПОСОБ ПРИМЕНЕНИЯ | 2006 |
|
RU2434602C2 |
| ИНДИВИДУАЛИЗИРОВАННОЕ ДЛЯ ПАЦИЕНТА ПОЗИЦИОНИРОВАНИЕ И ОРИЕНТИРОВАНИЕ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ ПРИ РАЗМЕЩЕНИИ ПРОХОДОВ | 2012 |
|
RU2662872C2 |
| ИМПЛАНТИРУЕМОЕ МЕДИЦИНСКОЕ УСТРОЙСТВО С КРЫШКОЙ И СПОСОБ | 2006 |
|
RU2449741C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ НАКОНЕЧНИКА ЭНДОСКОПА | 2018 |
|
RU2738782C1 |
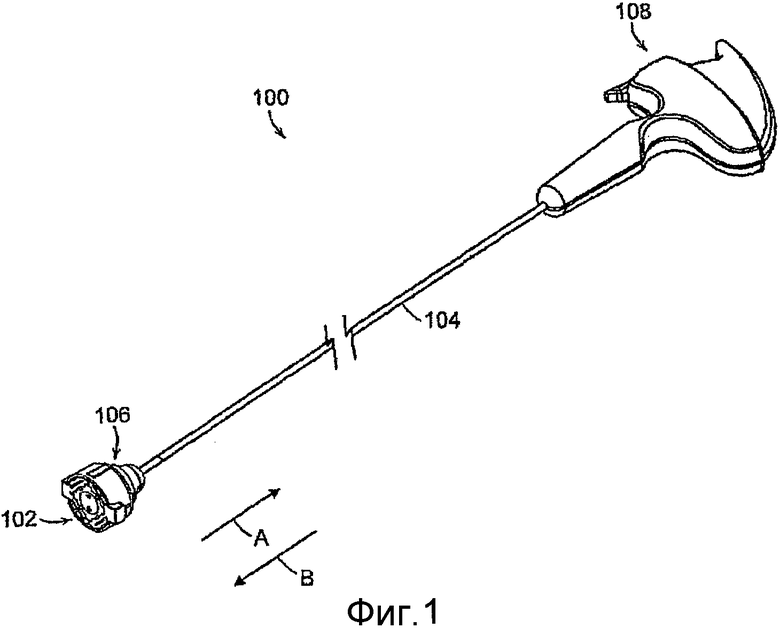
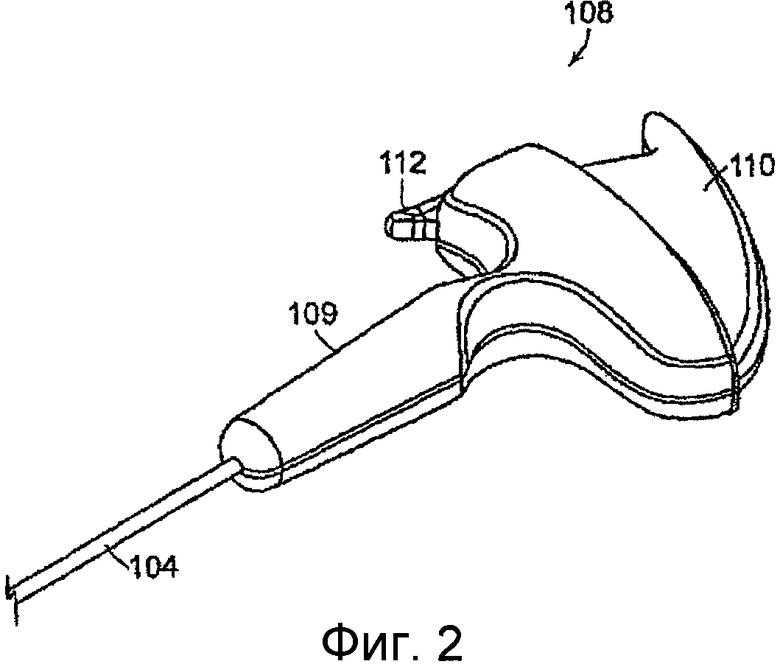
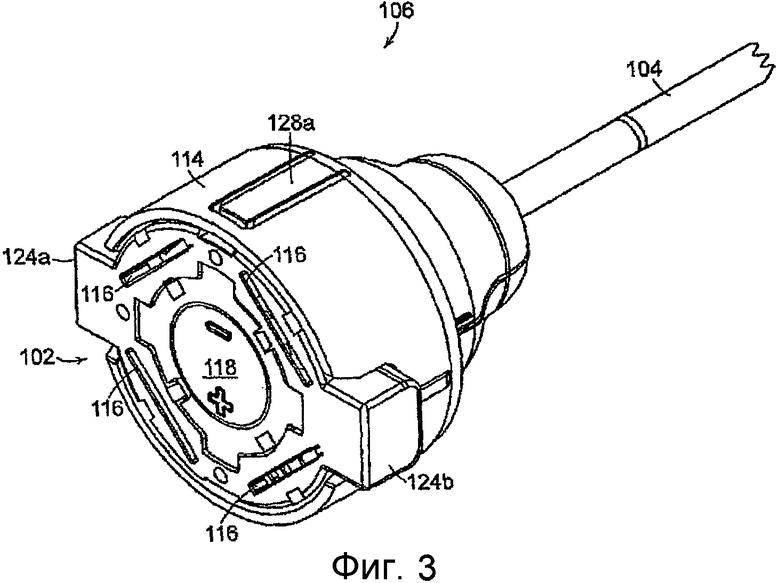
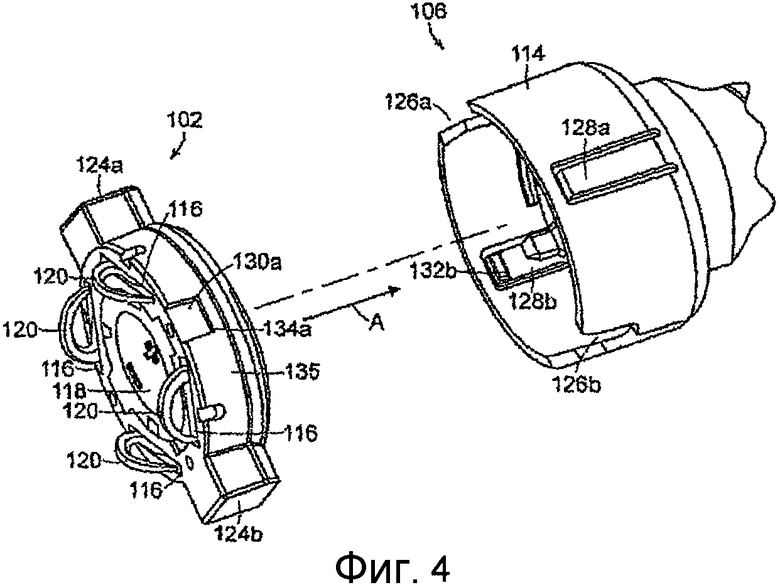
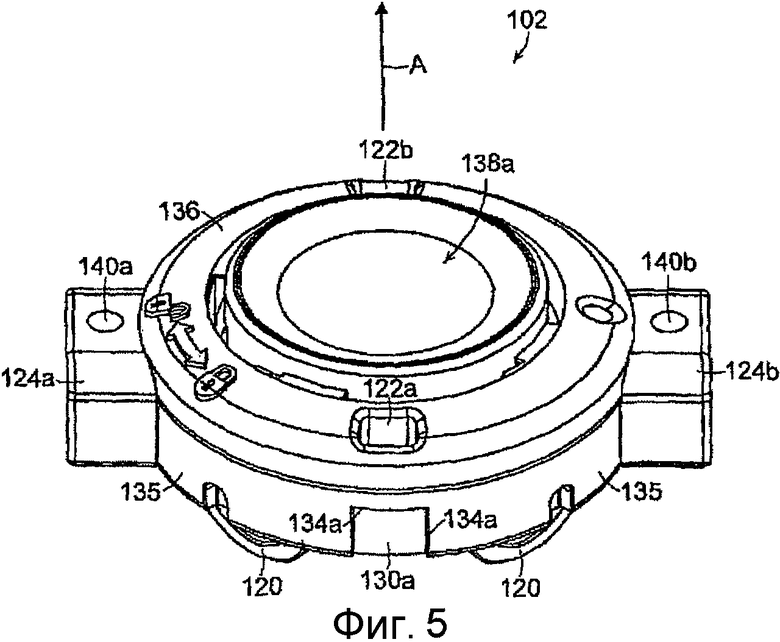
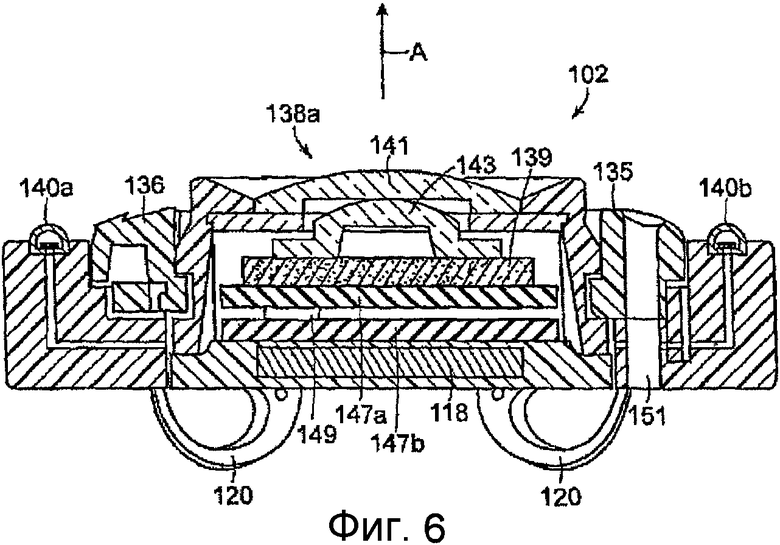
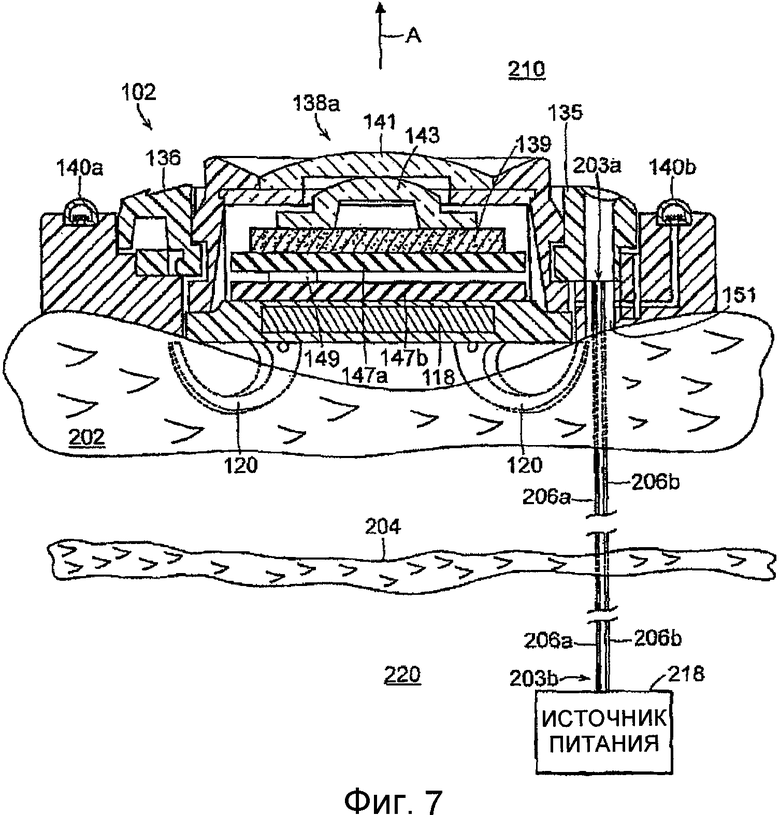
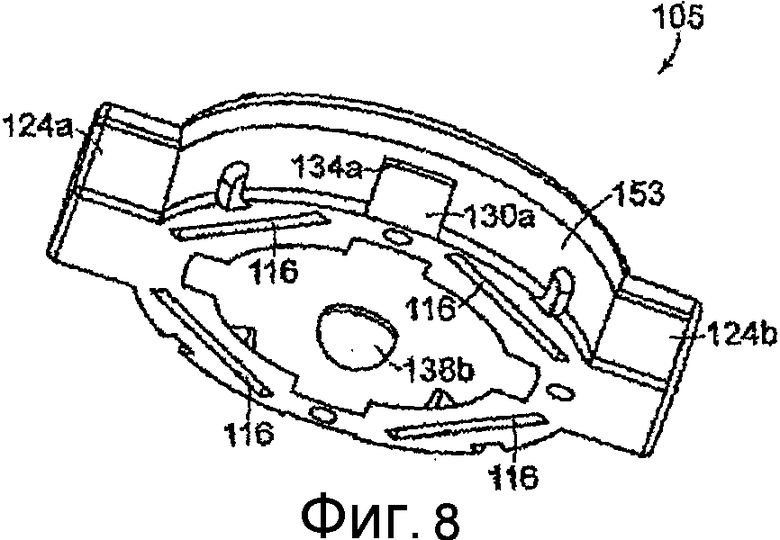
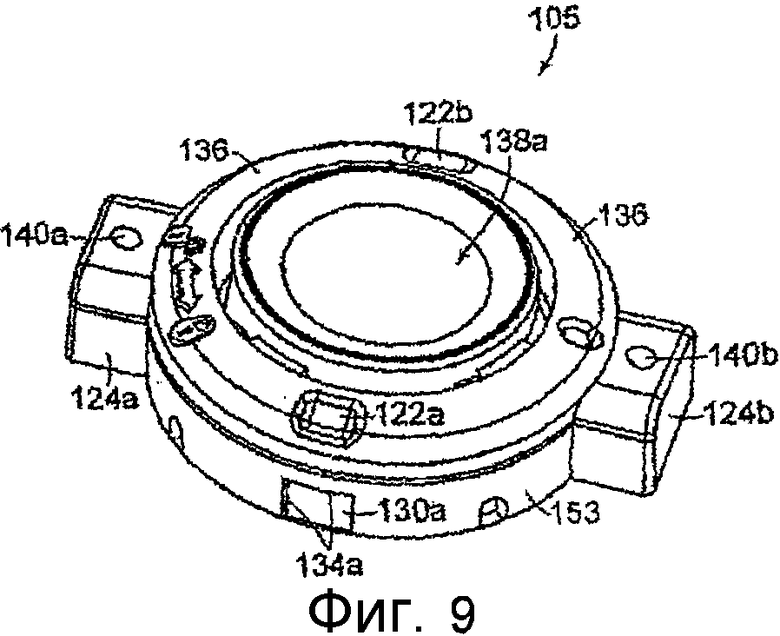
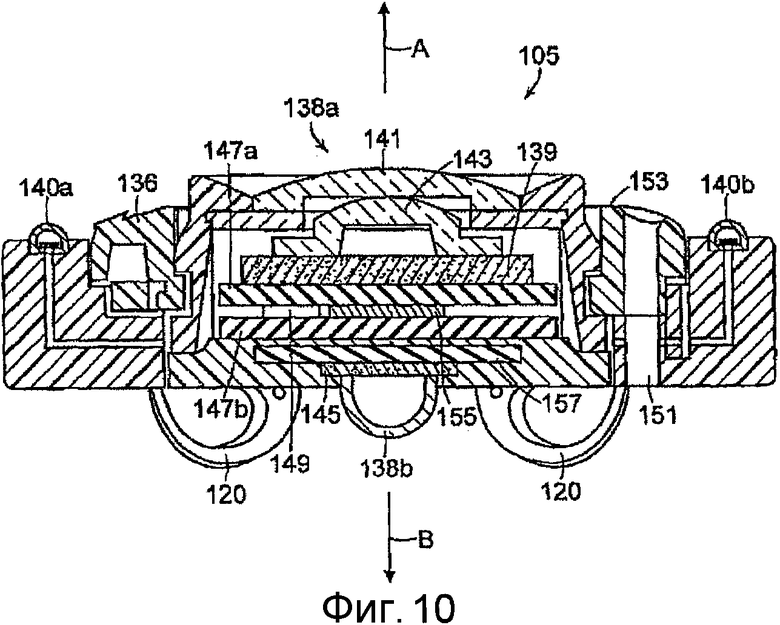
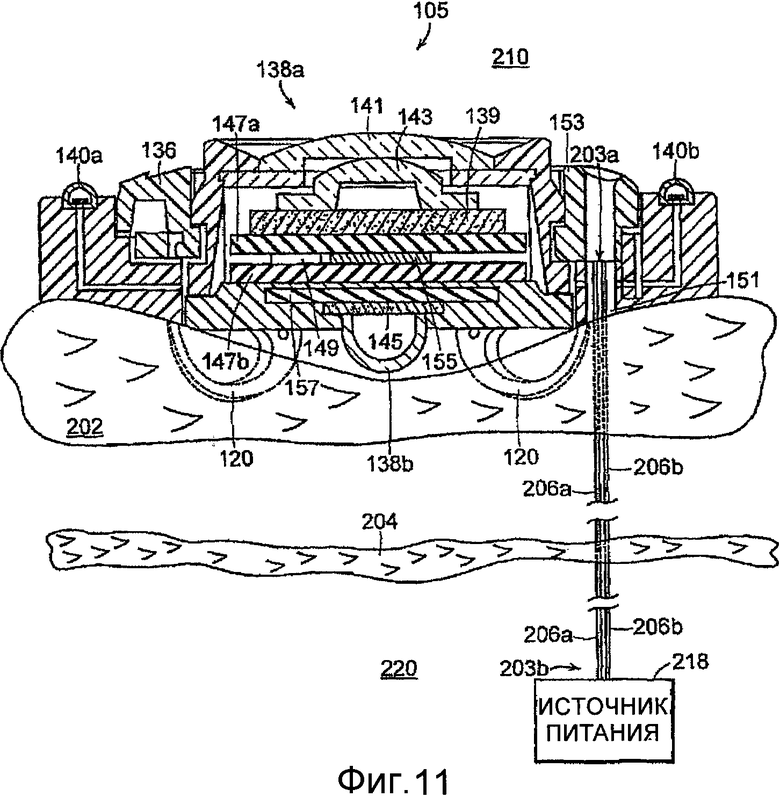
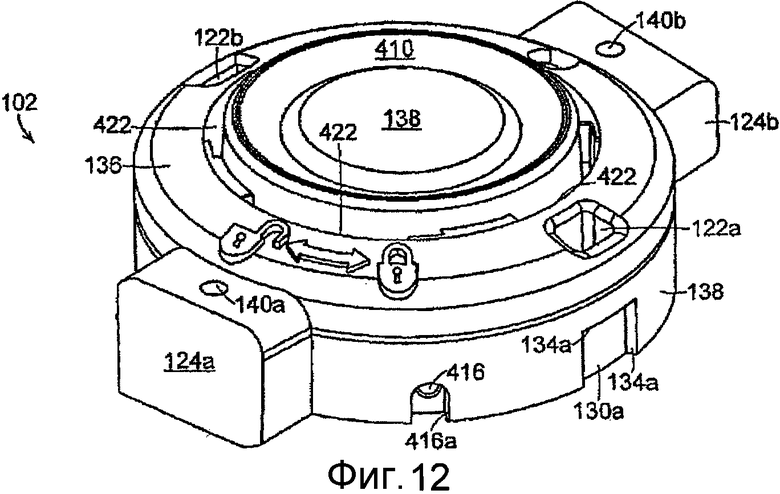
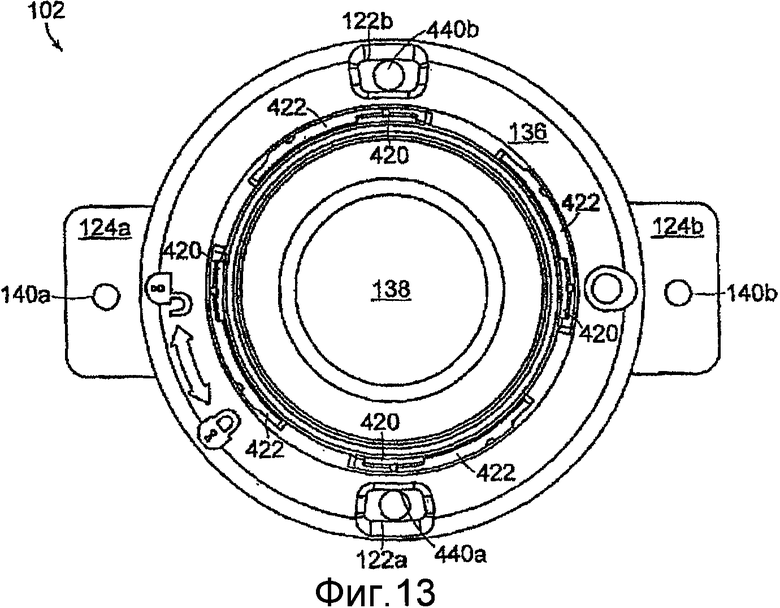
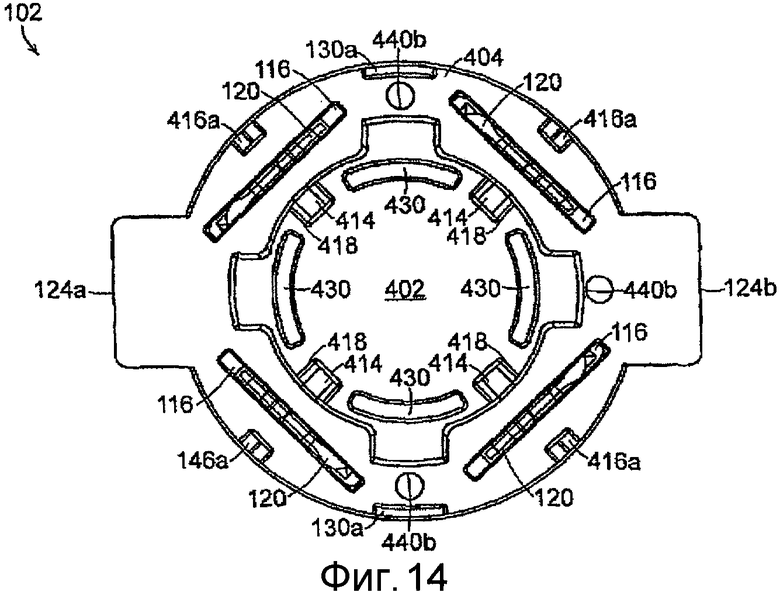
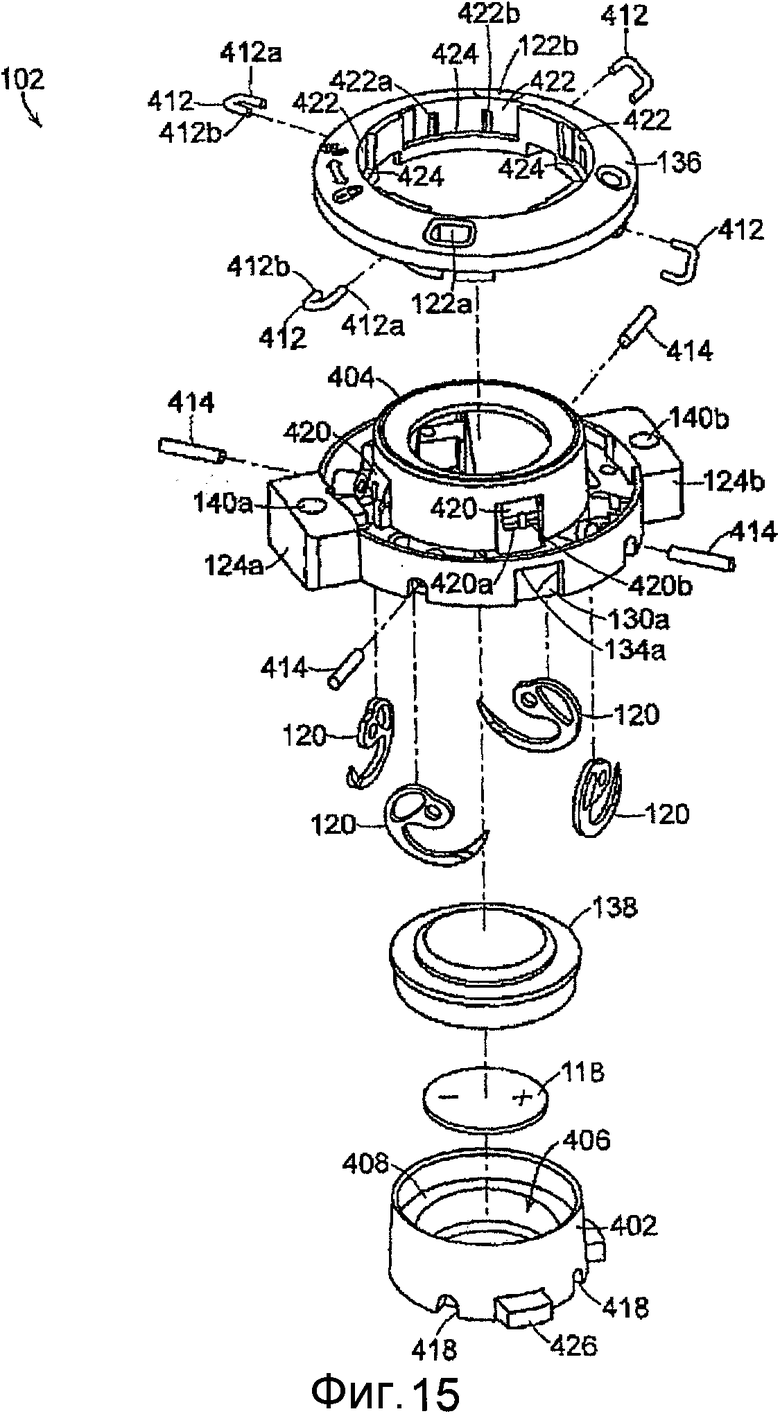

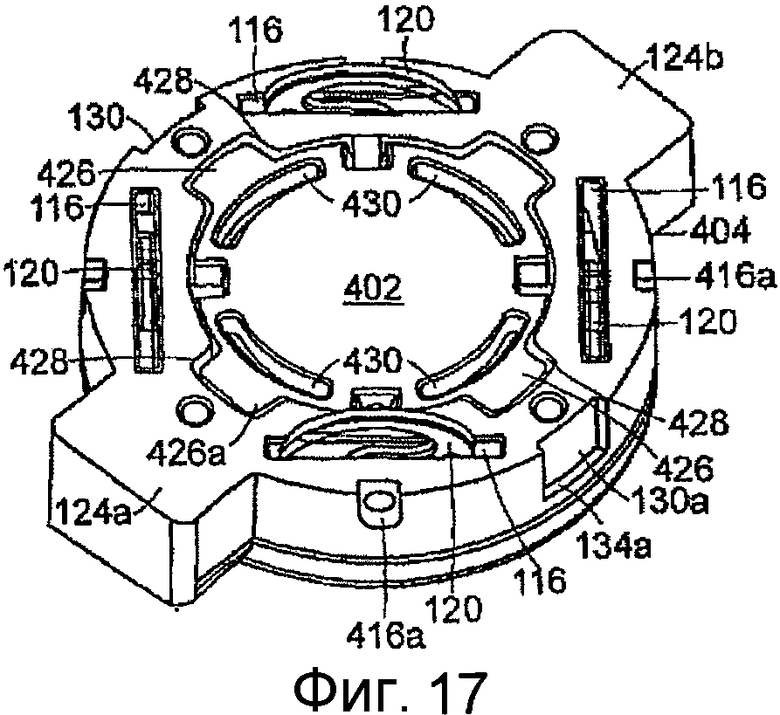
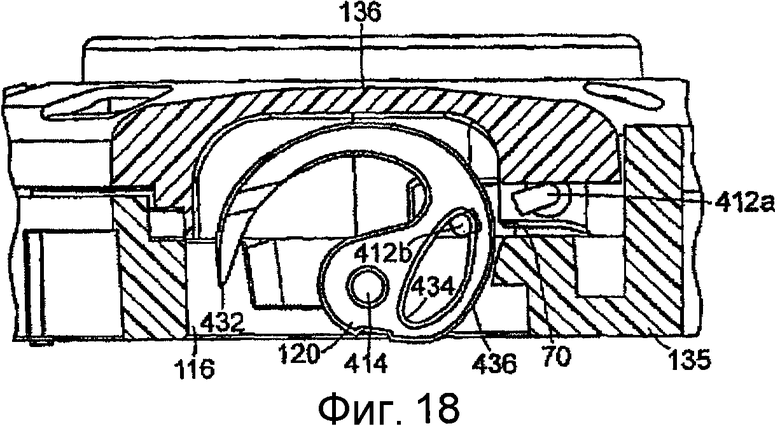
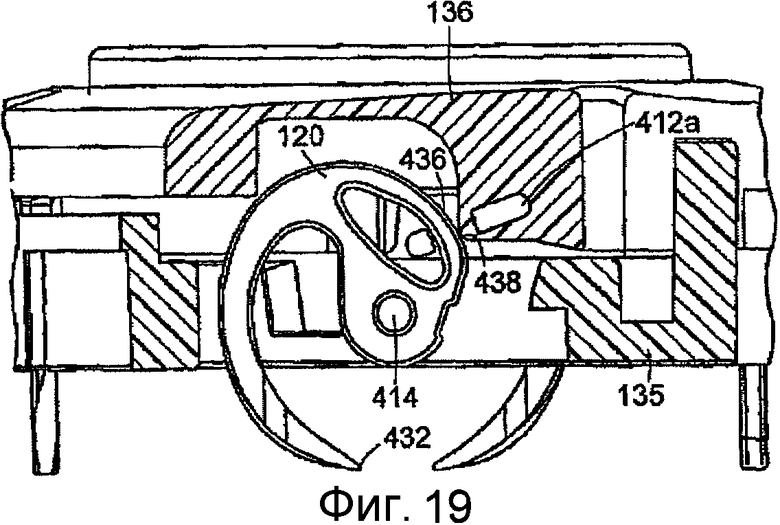
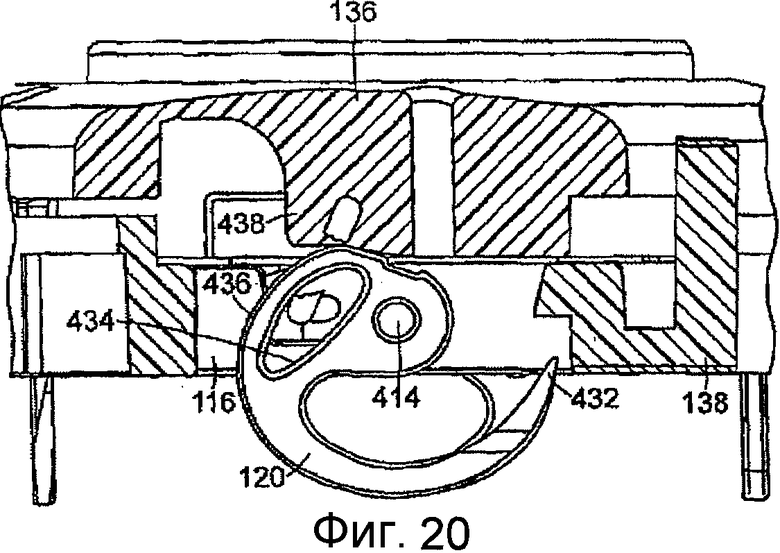
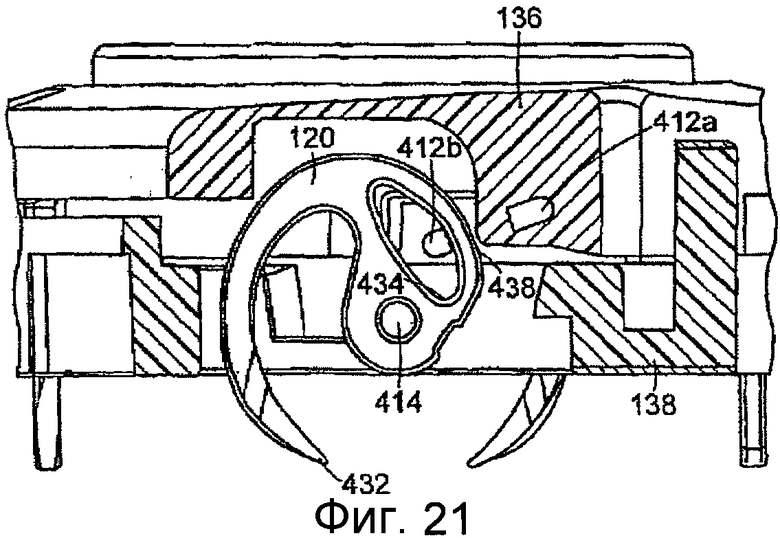

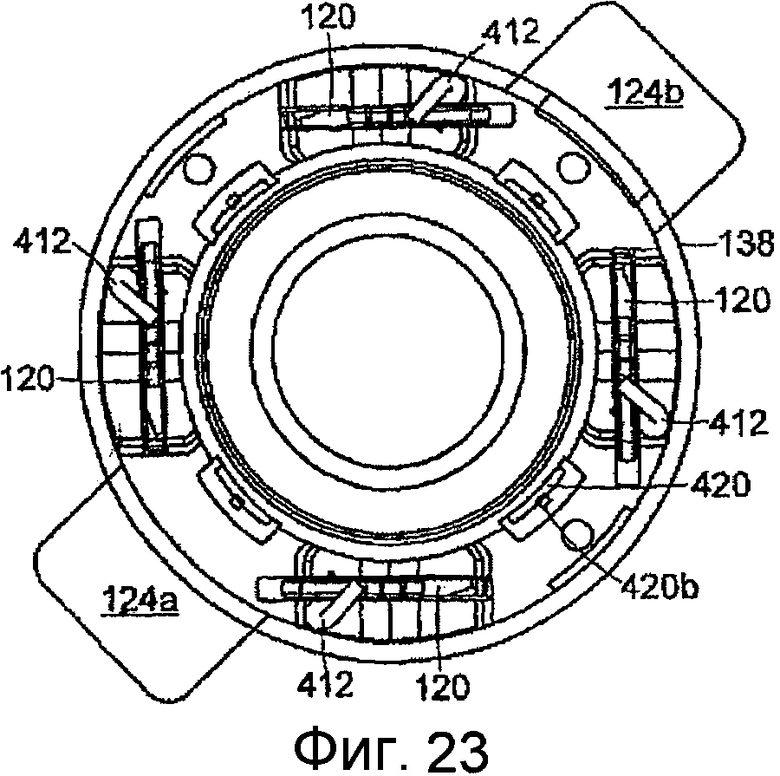
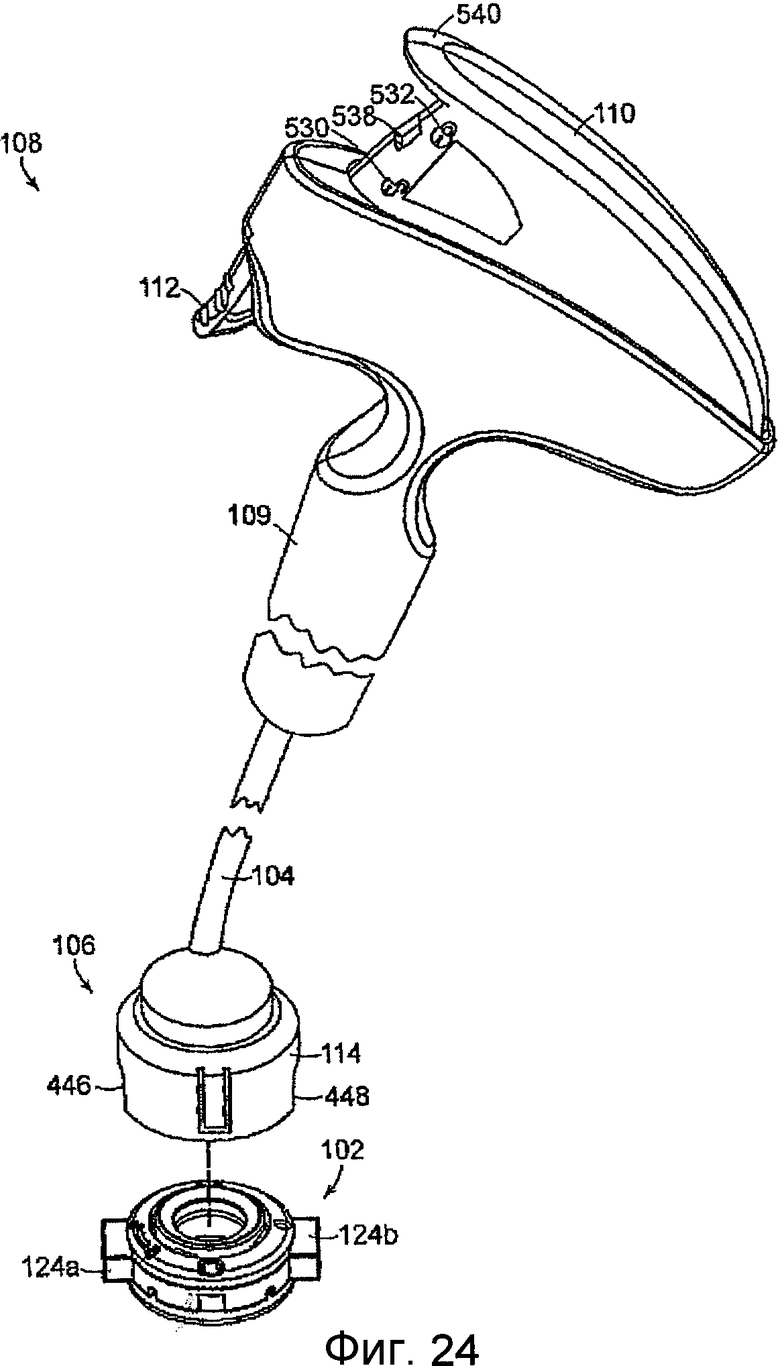
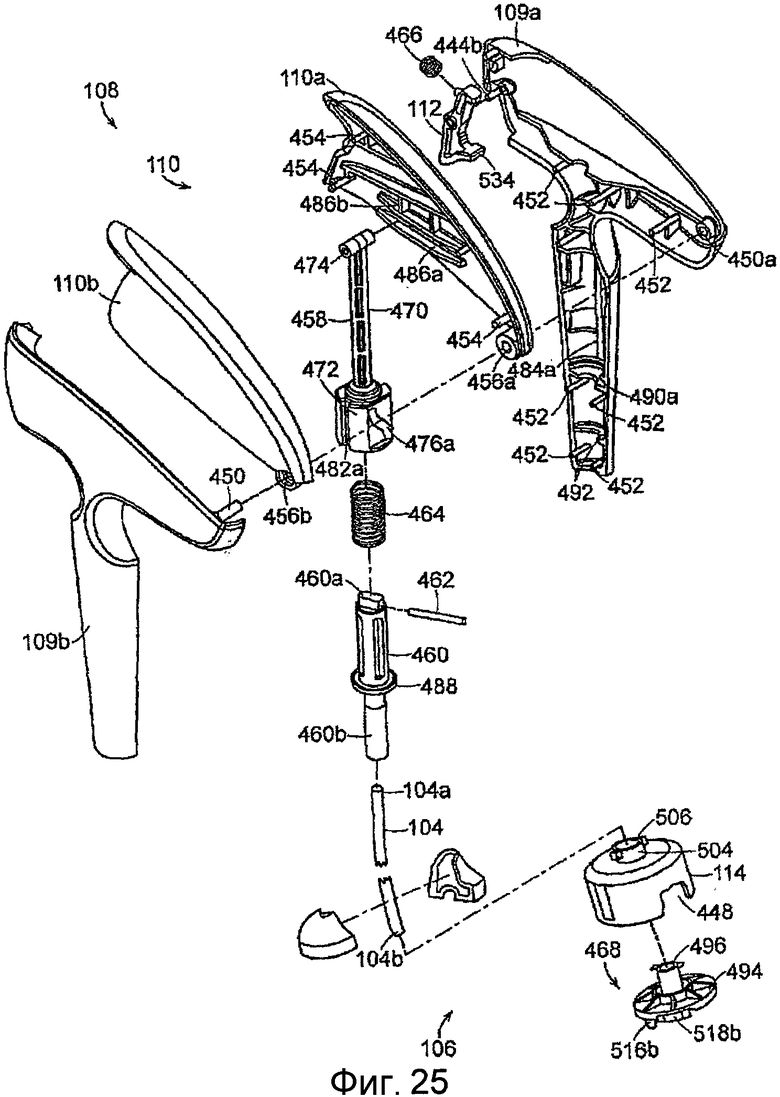
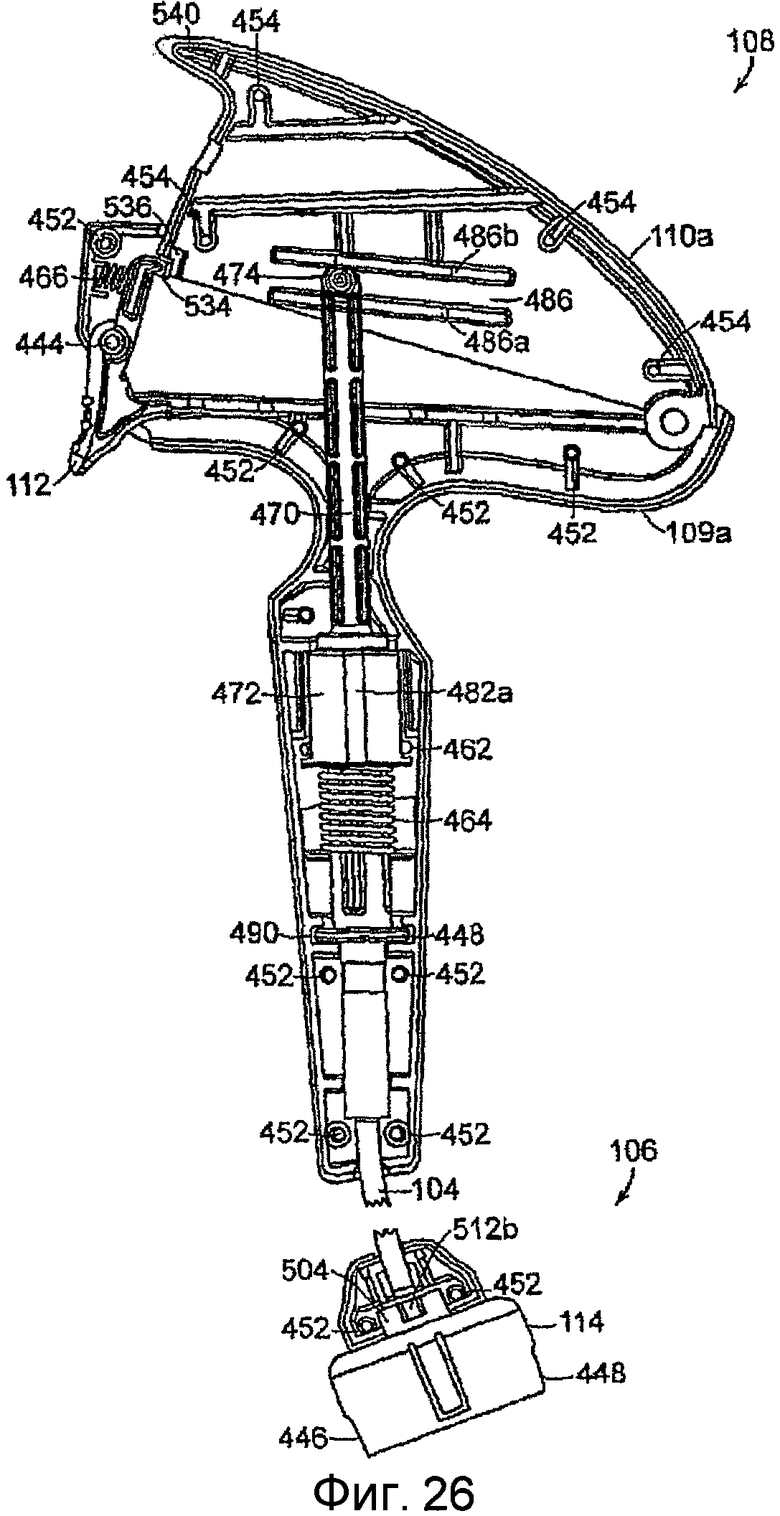
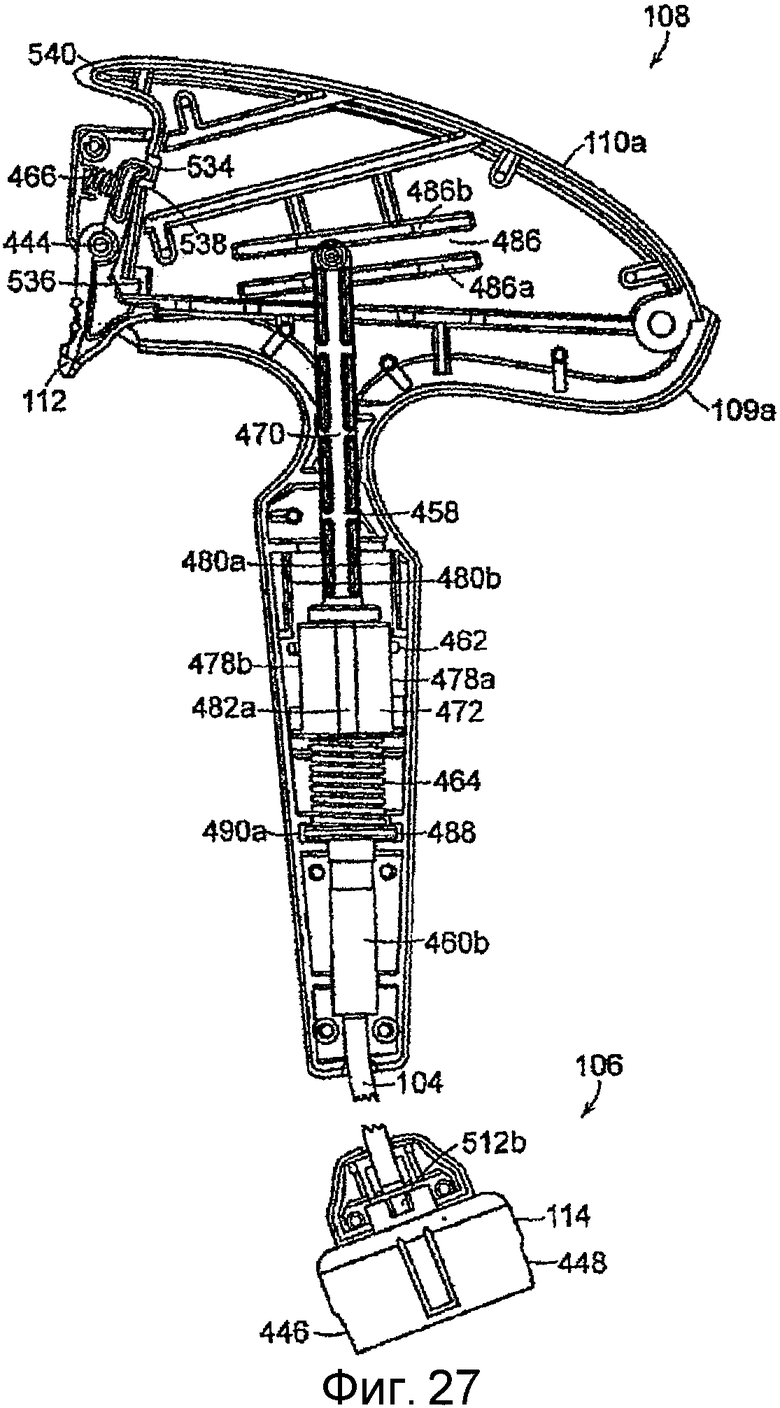
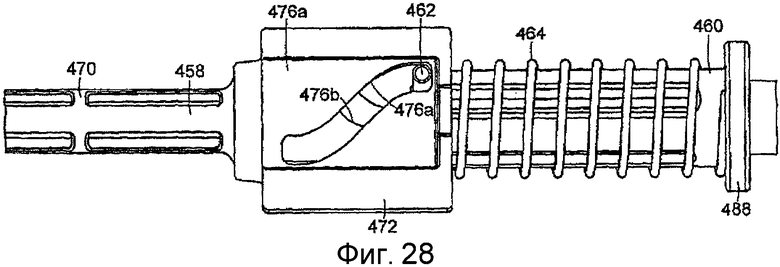
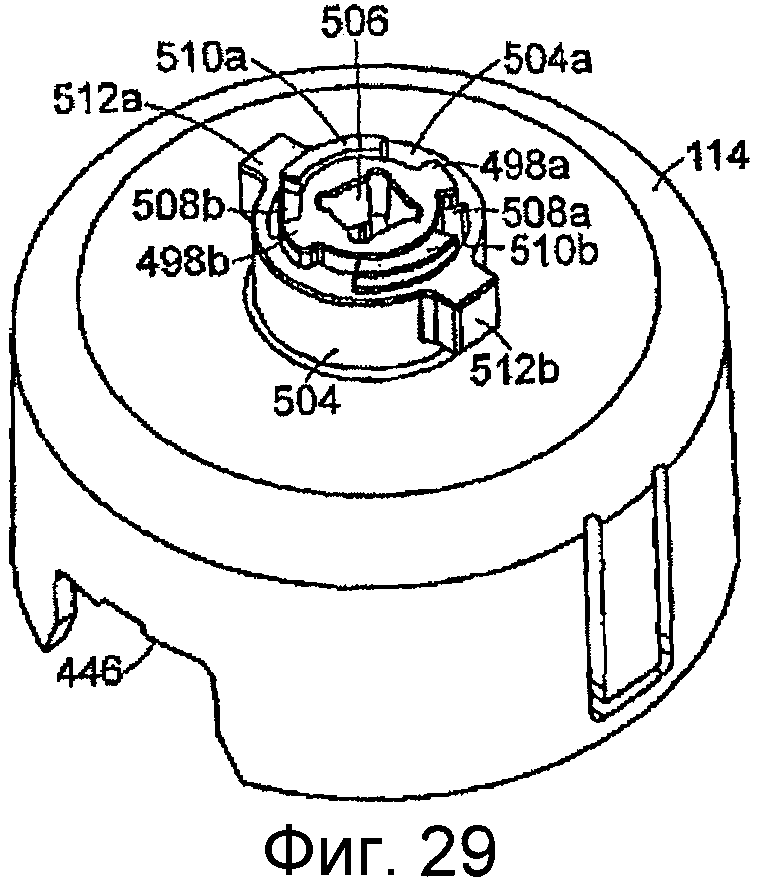
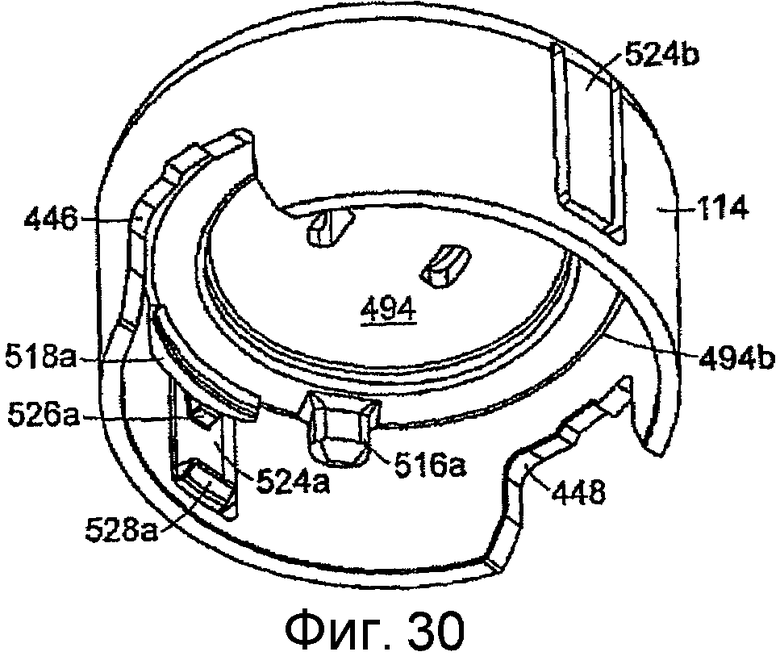
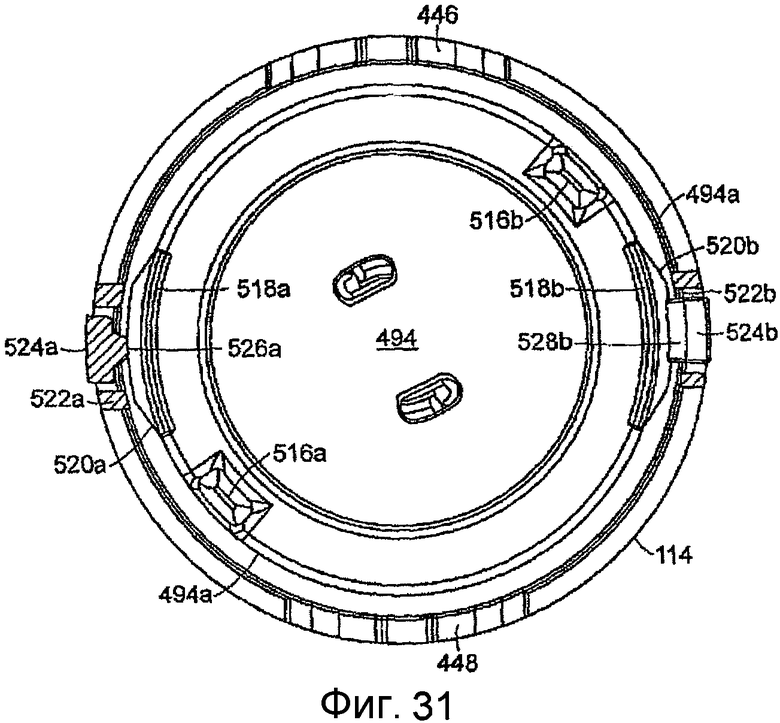
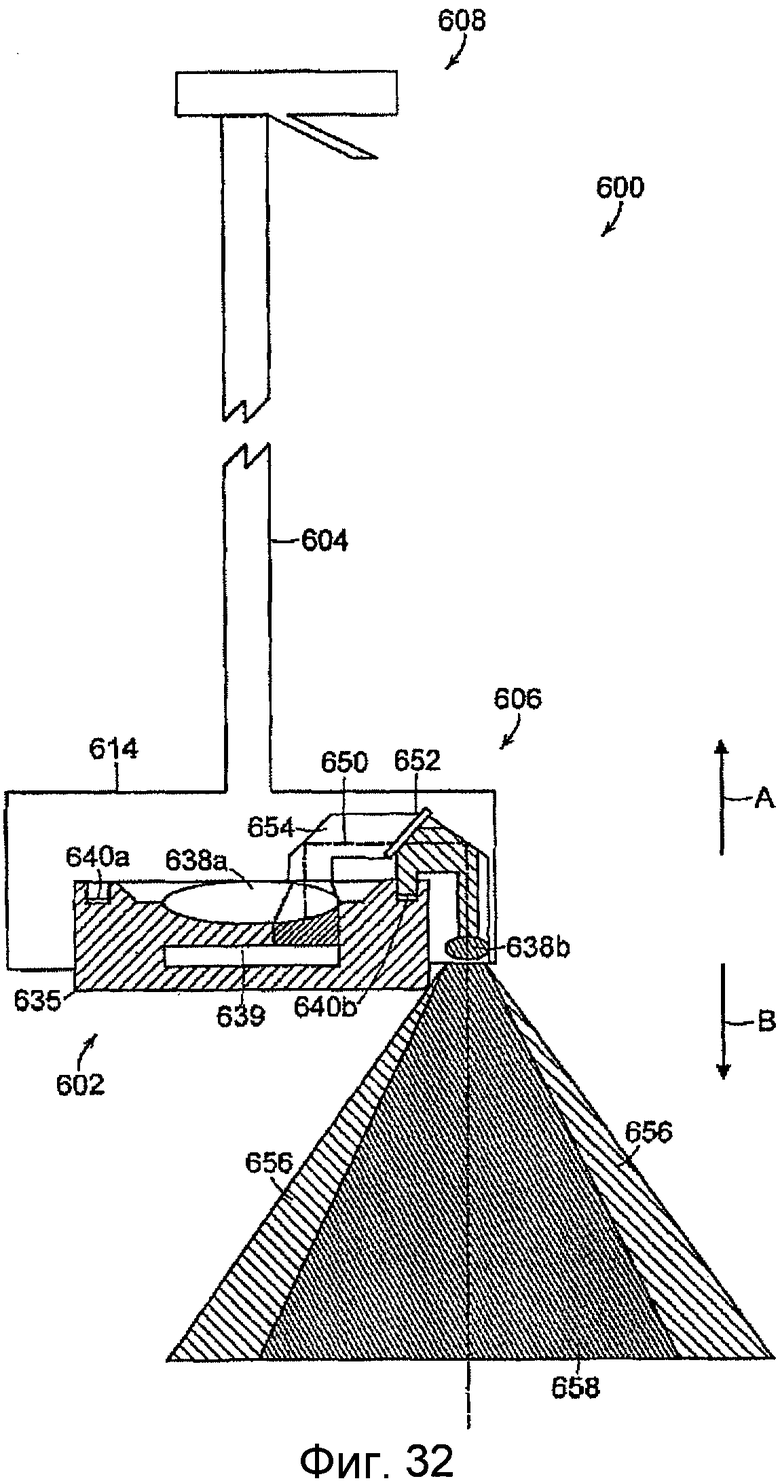
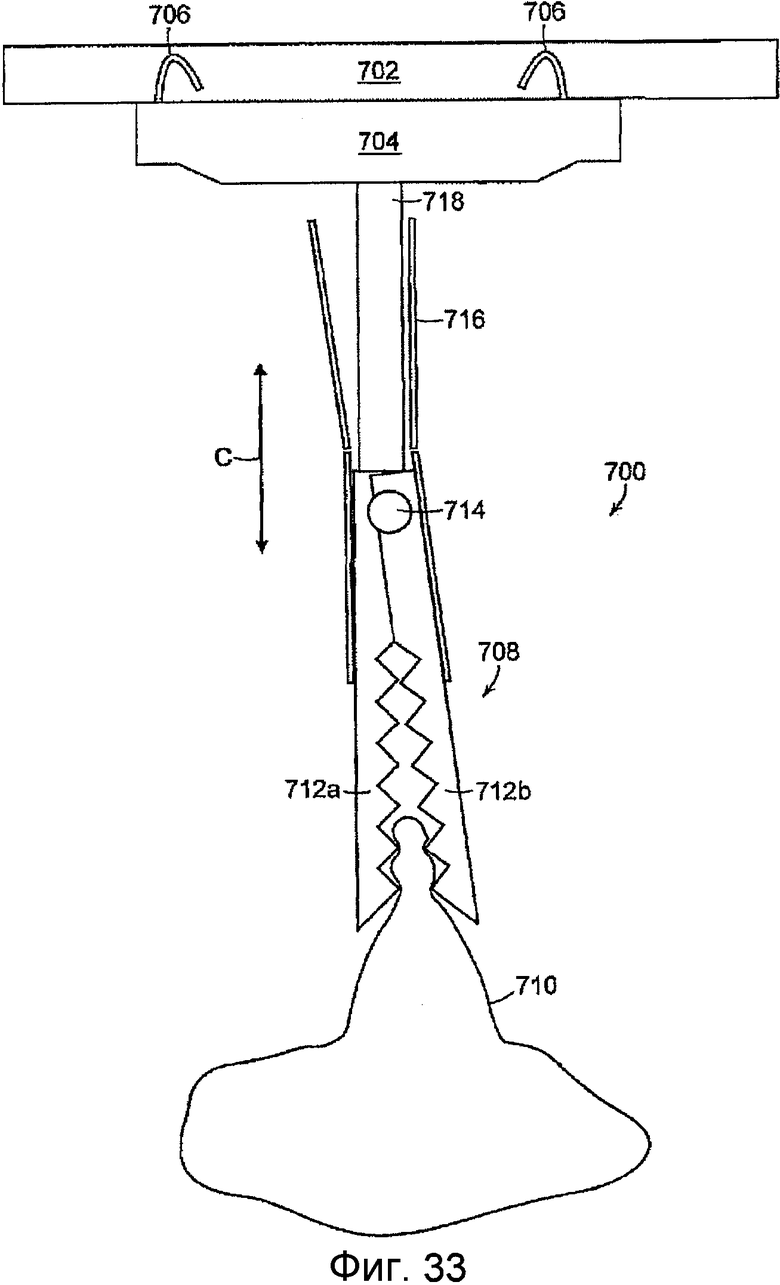
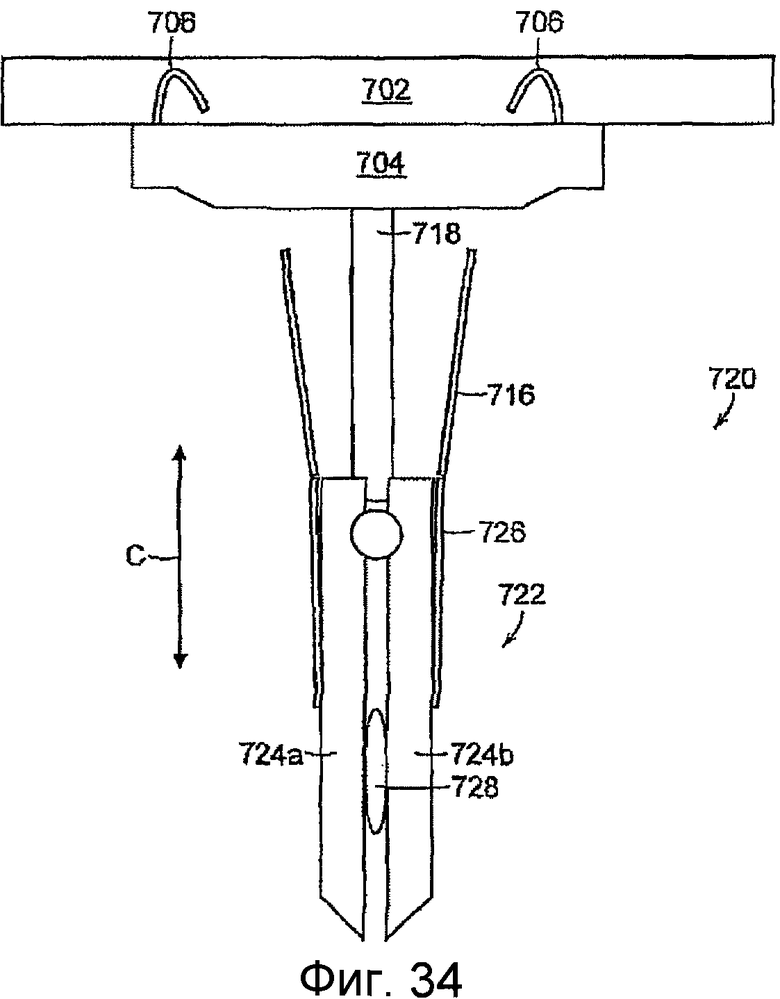
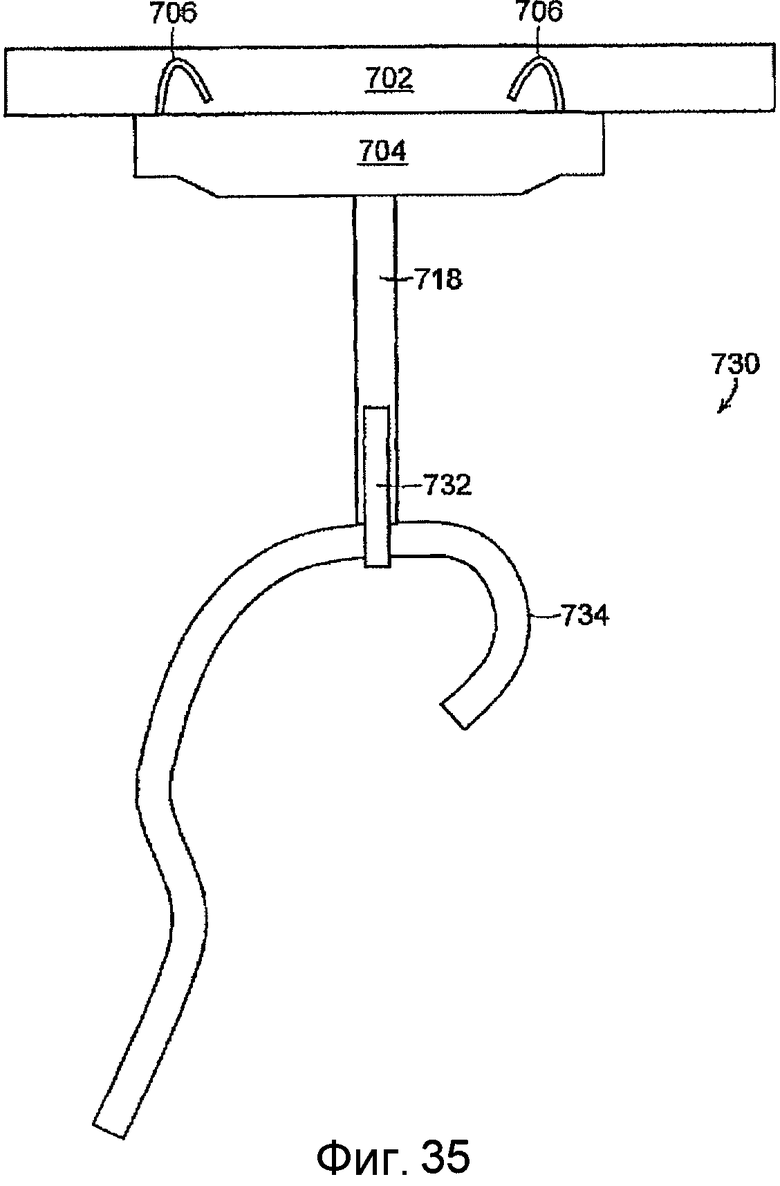
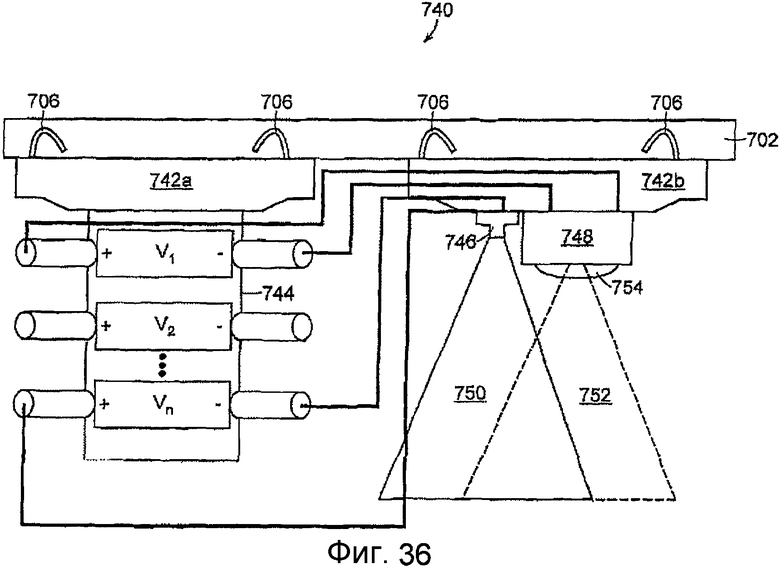
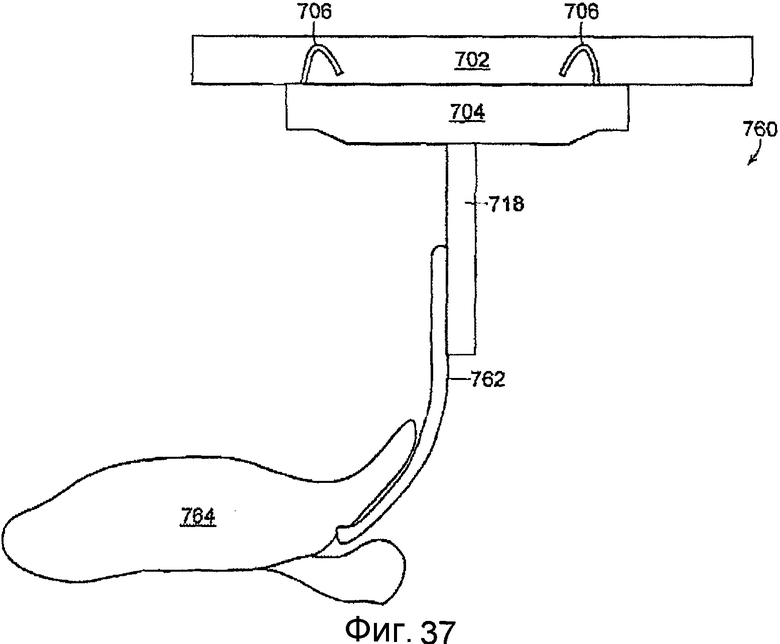
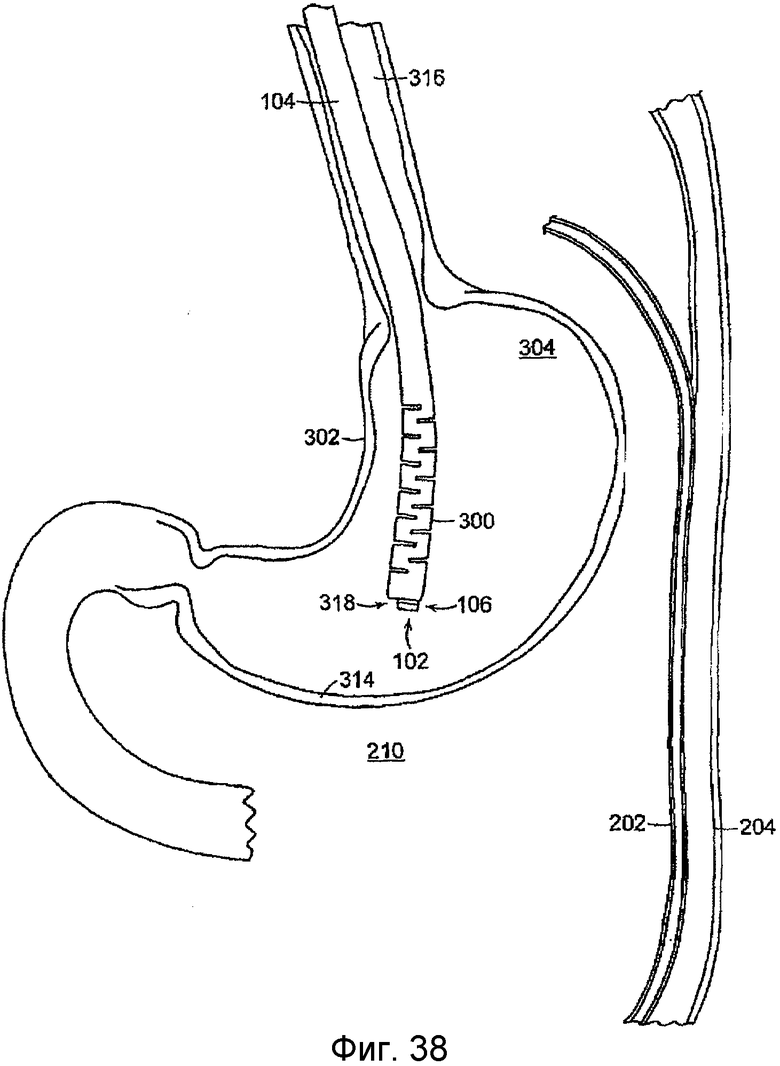
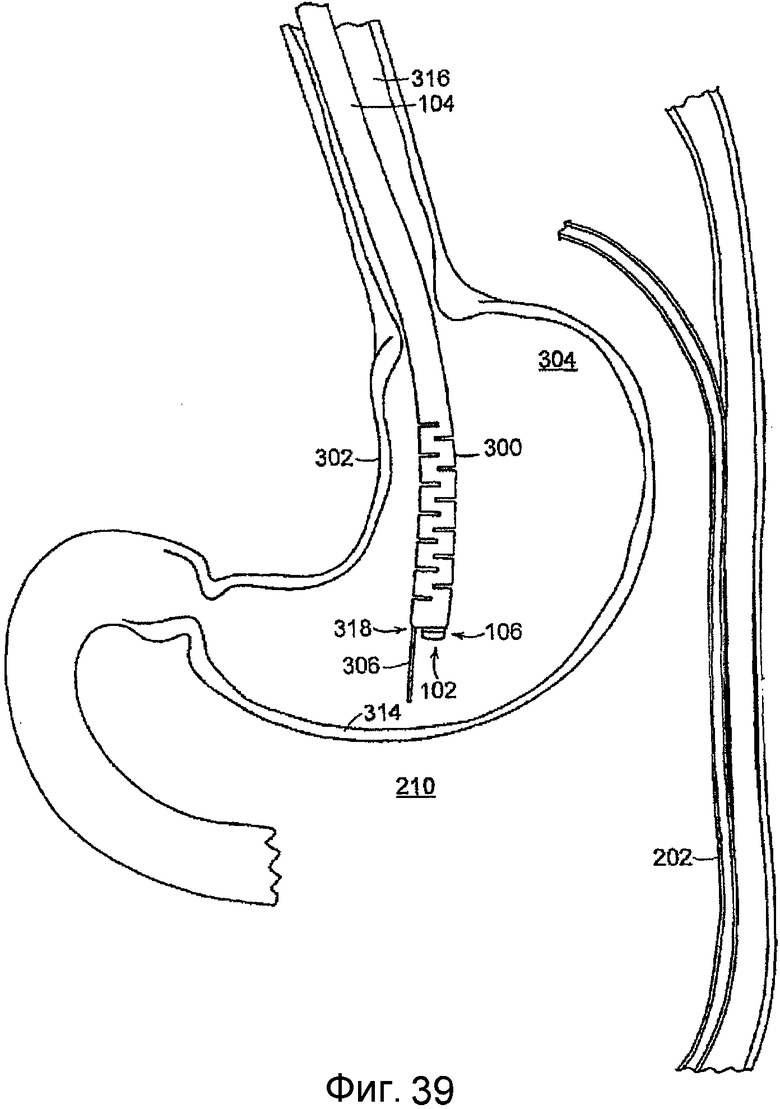
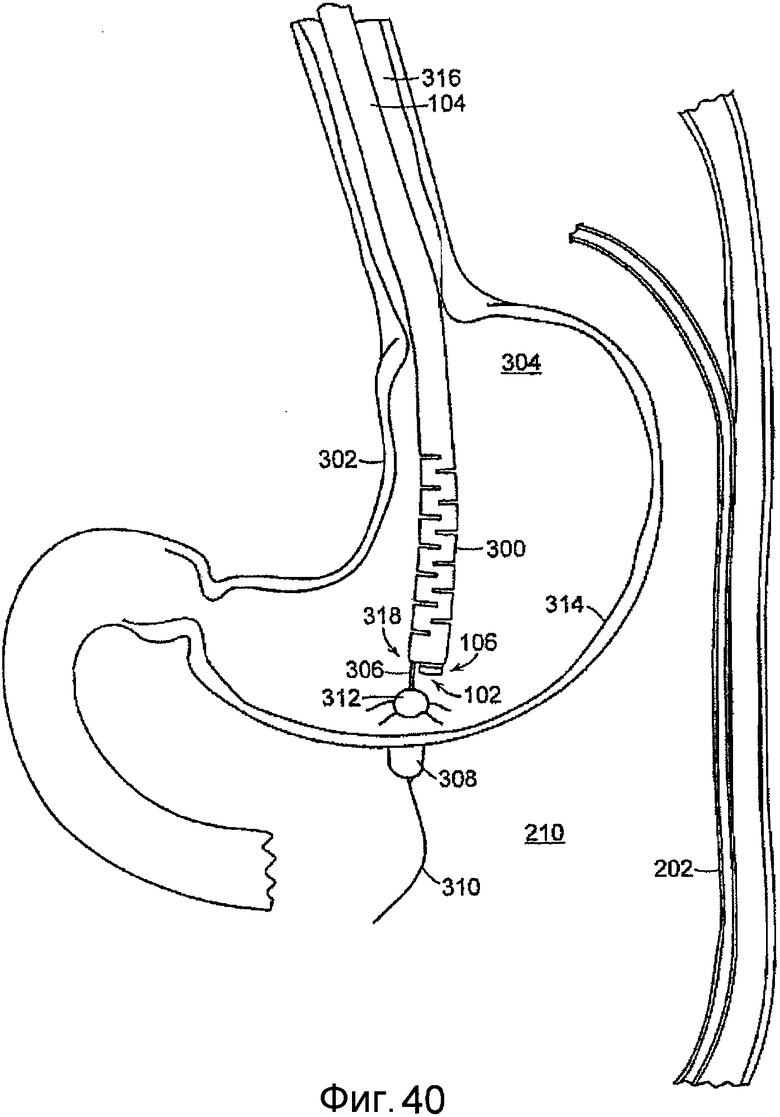
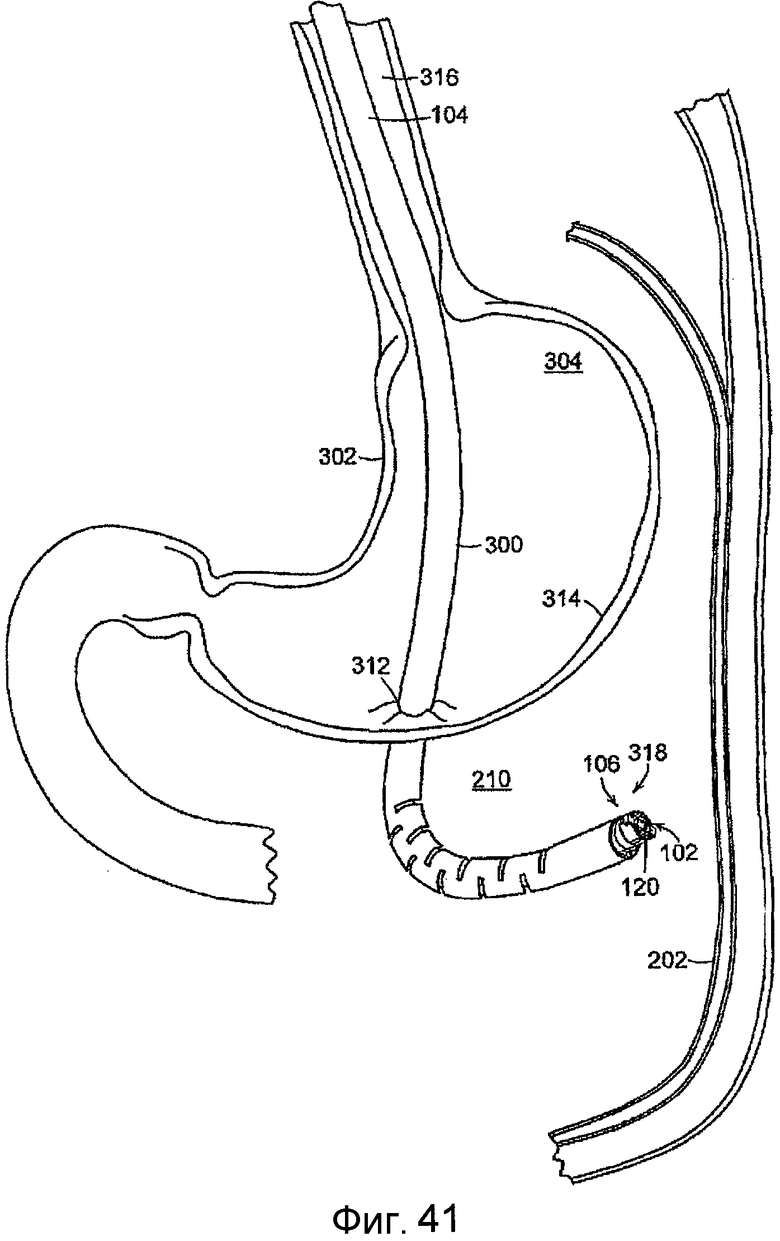
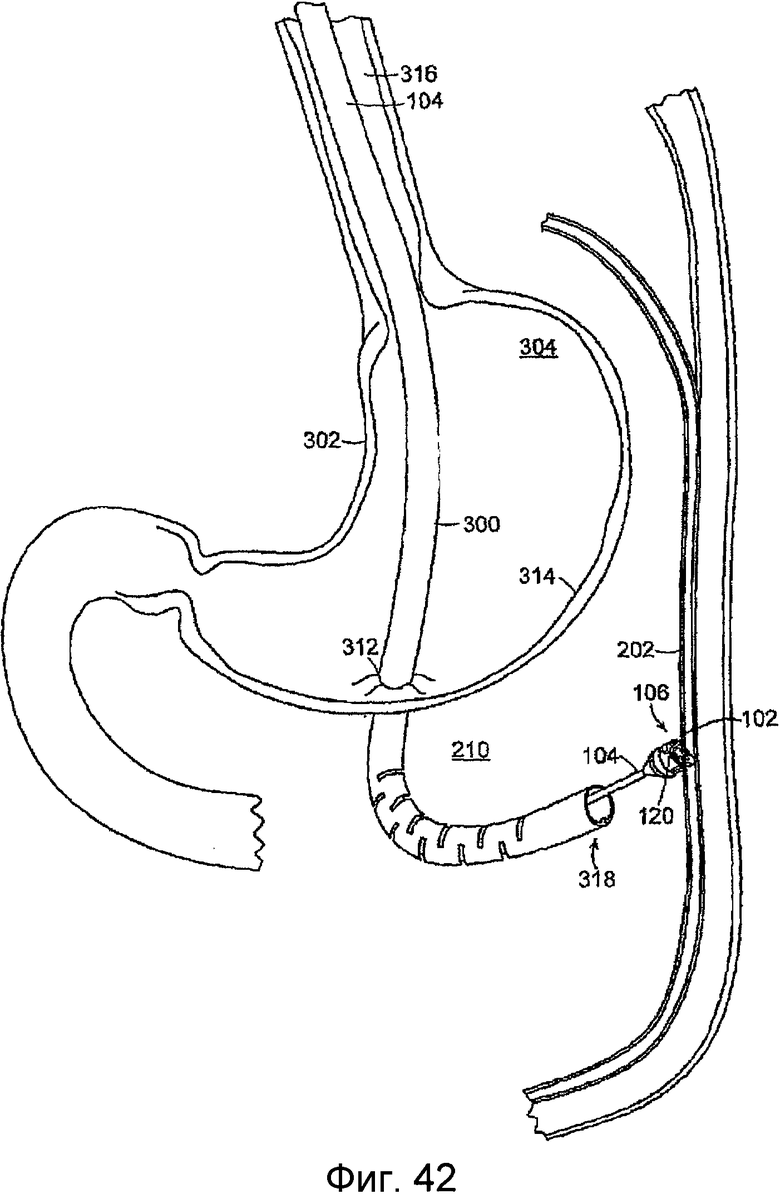
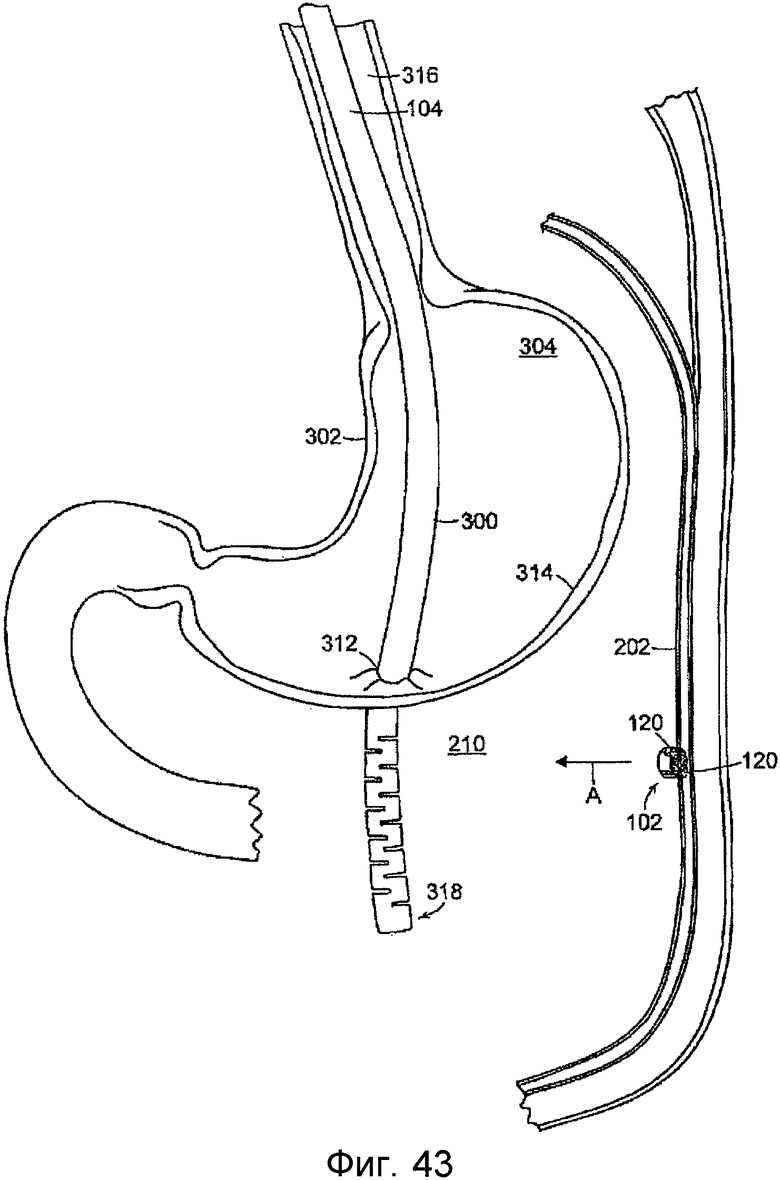
Изобретение относится к медицине, а именно к хирургическим устройствам и способам их использования. Временно устанавливаемое устройство содержит корпус, включающий механизм крепления к тканям тела, установочное приспособление и устройство распределения питания содержащихся в устройстве рабочих инструментов. Механизм крепления включает крепежную деталь для крепления корпуса к тканям тела. Крепежная деталь может иметь рабочее и нерабочее положения. Установочное приспособление перемещает крепежную деталь из нерабочего положения в рабочее. Способ размещения временно устанавливаемого медицинского устройства заключается в перемещении устройства к первому положению на основе просмотра изображений, полученных от камеры, размещении устройства и крепежной детали рядом с тканью тела и одновременном перемещении крепежной детали из нерабочего положения в рабочее для крепления устройства к ткани тела. Способ обработки временно устанавливаемых устройств заключается в получении временно устанавливаемого устройства, его стерилизации и хранении в стерильном контейнере. Использование изобретения обеспечивает повышение точности и эффективности доступа в рабочей зоне для проведения диагностических и терапевтических процедур. 3 н. и 39 з.п. ф-лы, 43 ил.
1. Временно устанавливаемое устройство для хирургических целей, содержащее:
временно устанавливаемый корпус;
механизм крепления, входящий в состав временно устанавливаемого корпуса и предназначенный для крепления к тканям тела, причем указанный механизм крепления включает в себя по меньшей мере одну крепежную деталь, входящую в состав временно устанавливаемого корпуса и предназначенную для крепления временно устанавливаемого корпуса к тканям тела, причем по меньшей мере одна крепежная деталь может имеет рабочее и нерабочее положение;
установочное приспособление, предназначенное для перемещения по меньшей мере одной крепежной детали из нерабочего положения в рабочее положение; и
устройство распределения питания, размещенное во временно устанавливаемом корпусе, для обеспечения питания содержащихся в устройстве рабочих инструментов.
2. Устройство по п.1, содержащее:
пусковой элемент;
кнопку блокировки, связанную с пусковым элементом;
причем установочное приспособление предназначено для перемещения указанной по меньшей мере одной крепежной детали из нерабочего положения в рабочее положение в результате приведения в действие пускового элемента в первом направлении; и
причем установочное приспособление предназначено для перемещения указанной по меньшей мере одной крепежной детали из рабочего положения в нерабочее положение посредством воздействия на кнопку блокировки и приведения в действие пускового элемента.
3. Устройство по п.1, содержащее множество крепежных деталей.
4. Устройство по п.1, содержащее камеру, размещенную во временно устанавливаемом корпусе.
5. Устройство по п.4, в котором камера содержит по меньшей мере один объектив.
6. Устройство по п.5, содержащее первое устройство формирования изображения, оптически связанное с указанным по меньшей мере одним объективом.
7. Устройство по п.5, в котором камера включает в себя второй объектив.
8. Устройство по п.5, содержащее второе устройство формирования изображения, оптически связанное со вторым объективом.
9. Устройство по п.1, содержащее зажим для ретракции ткани, размещенный во временно устанавливаемом корпусе.
10. Устройство по п.1, содержащее зажим для тканей, размещенный во временно устанавливаемом корпусе.
11. Устройство по п.1, содержащее фиксатор эндоскопа, размещенный во временно устанавливаемом корпусе.
12. Устройство по п.1, содержащее приспособление для временного создания свободного пространства, размещенное во временно устанавливаемом корпусе.
13. Устройство по п.1, содержащее первую и вторую клеммы подачи питания.
14. Устройство по п.13, в котором первая и вторая клеммы подачи питания предназначены для подключения к соответствующим первой и второй клеммам аккумуляторной батареи.
15. Устройство по п.13, в котором первая и вторая клеммы подачи питания предназначены для подключения соответствующих первого и второго чрескожных игольчатых электродов, обеспечивающих подключение камеры к источнику питания, размещенному снаружи ткани тела пациента.
16. Устройство по п.13, в котором первая и вторая клеммы подачи питания предназначены для подключения соответствующих первого и второго гибких проводников, обеспечивающих подключение камеры к источнику питания, размещенному снаружи ткани тела, посредством пути через естественное отверстие тела пациента.
17. Устройство по п.1, содержащее по меньшей мере один чрескожный проводник, предназначенный для передачи полученных изображений на внешний монитор.
18. Устройство по п.1, содержащее гибкий проводник, который выходит из тела пациента через естественное отверстие и обеспечивает передачу полученных изображений на внешний монитор.
19. Устройство по п.1, содержащее радиочастотный (РЧ) компонент, связанный с камерой и обеспечивающий беспроводную передачу изображений на внешний монитор при помощи РЧ-излучения.
20. Устройство по п.1, содержащее манипулятор, предназначенный для перемещения крепежной детали из нерабочего положения в рабочее положение.
21. Устройство по п.20, в котором манипулятор обеспечивает перемещение крепежной детали из нерабочего положения в рабочее положение.
22. Устройство по п.20, в котором манипулятор имеет конструкцию, противодействующую усилию, приложенному к крепежной детали и стремящемуся переместить крепежную деталь в нерабочее положение, когда крепежная деталь находится в рабочем положении.
23. Устройство по п.20, в котором манипулятор имеет конструкцию, противодействующую усилию, приложенному к крепежной детали и стремящемуся переместить крепежную деталь в нерабочее положение, когда крепежная деталь находится в рабочем положении, где указанное усилие представляет собой вращательное усилие.
24. Устройство по п.20, в котором крепежная деталь имеет конструкцию, обеспечивающую поворот вокруг соответствующей оси при перемещении из нерабочего положения в рабочее положение.
25. Устройство по п.24, в котором манипулятор имеет конструкцию, обеспечивающую поворот вокруг соответствующей оси, и включает в себя соответствующую поверхность, предназначенную для взаимодействия с крепежной деталью, причем указанная поверхность предназначена для приложения к крепежной детали вращательного усилия при повороте манипулятора в направлении перехода в рабочее положение с целью перемещения крепежной детали из нерабочего положения в рабочее положение.
26. Устройство по п.24, в котором манипулятор имеет конструкцию, противодействующую повороту под воздействием вращательного усилия, приложенного к крепежной детали и стремящегося переместить крепежную деталь в нерабочее положение, когда крепежная деталь находится в рабочем положении.
27. Устройство по п.26, в котором механизм крепления содержит фиксирующую систему, предназначенную для противодействия непреднамеренному повороту манипулятора.
28. Устройство по п.24, в котором манипулятор имеет конструкцию, обеспечивающую поворот вокруг соответствующей оси, и механизм крепления содержит соответствующий элемент, предназначенный для взаимодействия с крепежной деталью, причем указанный элемент находится на манипуляторе, причем манипулятор, крепежная деталь и указанный элемент имеют такую конструкцию, которая обеспечивает приложение указанным элементом вращательного усилия к каждой соответствующей крепежной детали при повороте манипулятора в направлении перехода в нерабочее положение для перемещения крепежной детали из рабочего положения в нерабочее положение.
29. Устройство по п.28, в котором крепежная деталь и связанный с ней элемент имеют конструкцию, обеспечивающую отсутствие приложения указанным элементом вращательного усилия в направлении перевода крепежной детали в рабочее положение при повороте манипулятора в направлении перемещения крепежной детали в рабочее положение.
30. Устройство по п.20, в котором манипулятор выполнен с возможностью поворота.
31. Устройство по п.30, в котором манипулятор содержит по существу кольцевой элемент, который закреплен с возможностью вращения на временно устанавливаемом корпусе.
32. Устройство по п.20, в котором манипулятор имеет конструкцию, обеспечивающую возможность перемещения крепежной детали посредством воздействия на манипулятор одним или большим числом стандартных хирургических инструментов.
33. Устройство по п.20, в котором крепежная деталь включает в себя дистальный конец, предназначенный для прокалывания ткани тела, причем крепежная деталь размещена в соответствующей прорези временно устанавливаемого корпуса и дистальный конец размещен в соответствующей прорези, когда крепежная деталь находится в нерабочем положении.
34. Устройство по п.33, в котором крепежная деталь полностью размещена в соответствующей прорези при нахождении крепежной детали в нерабочем положении.
35. Устройство по п.33, в котором дистальный конец размещен в соответствующей прорези, причем дистальный конец размещен в соответствующей прорези при нахождении крепежной детали в рабочем положении.
36. Устройство по п.20, в котором крепежная деталь содержит дистальный конец, предназначенный для прокалывания ткани тела, причем крепежная деталь размещена в соответствующей прорези и дистальный конец размещен в соответствующей прорези, когда крепежная деталь находится в рабочем положении.
37. Способ размещения временно устанавливаемого медицинского устройства по п.1 для хирургических целей, включающий:
перемещение временно устанавливаемого медицинского устройства к первому положению на основе просмотра изображений, полученных от камеры, размещенной во временно устанавливаемом медицинском устройстве, при этом камера обеспечивает обзор в прямом направлении введения временно устанавливаемого медицинского устройства;
размещение временно устанавливаемого медицинского устройства и крепежной детали, входящей в состав временно устанавливаемого устройства, в первом положении, находящемся рядом с тканью тела; и
одновременное перемещение крепежной детали из нерабочего положения в рабочее положение для крепления временно устанавливаемого медицинского устройства к ткани тела в первом положении.
38. Способ по п.37, включающий перемещение крепежной детали из рабочего положения в нерабочее положение для отделения временно устанавливаемого медицинского устройства от ткани тела.
39. Способ по п.37, включающий:
передачу изображений от камеры во время перемещения временно устанавливаемого медицинского устройства в первое положение.
40. Способ по п.37, включающий:
размещение временно устанавливаемого медицинского устройства во втором положении, прилегающем к ткани тела; и одновременное перемещение крепежной детали из нерабочего положения в рабочее положение для крепления временно устанавливаемого медицинского устройства к ткани тела во втором положении.
41. Способ по п.37, включающий размещение временно устанавливаемого медицинского устройства и крепежной детали, входящей в состав временно устанавливаемого устройства, через гибкую часть троакара.
42. Способ обработки временно устанавливаемых устройств для хирургических целей, включающий:
получение временно устанавливаемого устройства по п.1,
стерилизацию временно устанавливаемого устройства; и
хранение временно устанавливаемого устройства в стерильном контейнере.
| US 2005283119 A1, 22.12.2005 | |||
| US 2007197865 A1, 23.08.2007 | |||
| US 2004158124 A1, 12.08.2004 | |||
| US 2004267095 A1, 30.12.2004 | |||
| US 5010876 B1, 30.04.1991 | |||
| Катетер-троакар | 1984 |
|
SU1306570A1 |

