Это раскрытие относится к медицинским инструментам и, в частности, к оптическим волокнам распознавания формы в медицинских приложениях для идентификации ответвлений просвета и осуществления доступа к ним.
Аортокоронарное обходное шунтирование (АКШ) это хирургическая операция для реваскуляризации перекрытых коронарных артерий. В традиционной хирургии вскрывается грудина пациента, сердце полностью обнажается. Важной частью этой операции является удаление сосуда из тела пациента, который затем используется для шунтирования одного или более атеросклеротических сужений в коронарных артериях. В качестве сосуда чаще всего используется внутренняя грудная артерия (ВГА), которая располагается в грудной клетке. Другие используемые сосуды включают в себя подкожную вену (ноги) и лучевую артерию (руки).
Минимально инвазивное (МИ) шунтирование осуществляется через малые порты (например, имеющие размер отверстия около 5 мм для полностью эндоскопических операций и около 50-60 мм для МИ прямого шунтирования). В ходе МИ сердечного шунтирования, прямой доступ к сосудам, используемым для замены при шунтировании недоступен, и сосуды удаляются с использованием длинных инструментов, введенных в порты. В ходе МИ хирургии, хирургическая медсестра может держать эндоскоп, или эндоскоп может удерживаться с использованием роботизированного наведения. В случае роботизированного наведения, визуальное сервоуправление можно использовать для перемещения робота в конкретное положение. Визуальное сервоуправление включает в себя выбор точки на эндоскопическом изображении, когда робот перемещается для поддержания точки в центре изображения.
Сосуды, которые используются в реваскуляризации сердца, часто бывают внедрены в жир и фасцию, и для их удаления их нужно аккуратно иссекать из окружающей ткани. Кроме того, сосуды представляют многочисленные малые ответвления, которые необходимо отсекать и запечатывать с использованием скрепок или прижигания во избежание утечки через сосуды после осуществления шунтирования. Это очень ответственная часть операции и часто наиболее длительная, особенно в МИ хирургии. Зрение в ходе этой части обеспечивается исключительно посредством эндоскопа, введенного через грудной порт. С учетом этих ограничений, ответвления часто могут быть пропущены, в результате чего, они могут быть по невнимательности отрезаны, но не защемлены или не прижжены надлежащим образом. Это может приводить к утечке крови через эти боковые ответвления, что часто требует повторной реваскуляризации и дополнительного хирургического вмешательства.
В соответствии с настоящими принципами, способ визуализации, осуществление доступа и/или мониторинга ответвлений просвета включает в себя введение оптоволоконного устройства распознавания формы в просвет и определение ответвлений в просвете на основании деформации, создаваемой изменениями расхода в просвете в оптоволоконном устройстве распознавания формы. Положения ответвлений указываются на представлении просвета. Инструмент направляется в положения ответвлений, указанные на представлении.
В другом варианте осуществления, способ визуализации, осуществления доступа и/или мониторинга расхода в разветвленном просвете включает в себя введение оптоволоконного устройства распознавания формы в просвет; определение позиции просвета и положений ответвлений от просвета на основании изменений расхода в просвете, обусловленных флуктуациями, порожденными деформацией, измеренными оптоволоконным устройством распознавания формы; формирование изображения участка просвета для обеспечения изображения в реальном времени; совмещение изображения в реальном времени с позицией просвета, измеренной оптоволоконным устройством распознавания формы; и генерацию изображения с наложением, указывающего позицию просвета и положения ответвлений на изображении в реальном времени.
Система для мониторинга кровеносного сосуда включает в себя процессор, память, подключенную к процессору, и модуль распознавания и интерпретации, хранящийся в памяти и выполненный с возможностью интерпретации данных оптоволоконного распознавания формы из оптоволоконного устройства распознавания формы, введенного в кровеносный сосуд, причем данные распознавания формы определяют ответвления кровеносного сосуда. Модуль генерации изображения хранится в памяти и выполнен с возможностью генерации изображения с наложением на основании данных оптоволоконного распознавания формы, указывающих форму кровеносного сосуда и положения ответвлений от кровеносного сосуда. Дисплей выполнен с возможностью визуализации изображения с наложением поверх представления кровеносного сосуда для обеспечения руководства по нахождению ответвлений кровеносного сосуда и манипуляции с ними.
Эти и другие задачи, признаки и преимущества настоящего раскрытия явствуют из нижеследующего подробного описания его иллюстративных вариантов осуществления, которое приведено совместно с прилагаемыми чертежами.
В этом раскрытии описание предпочтительных вариантов осуществления будет подробно представлено ниже со ссылкой на следующие фигуры, в которых:
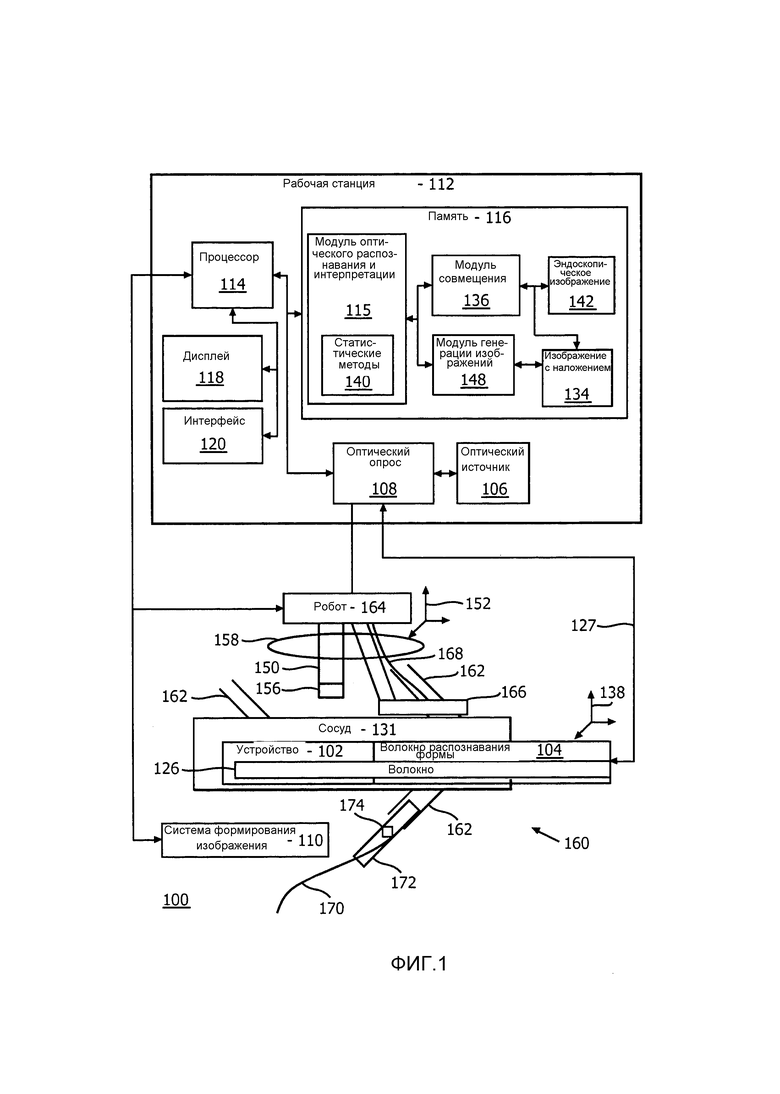
фиг. 1 - блок-схема демонстрирующая систему распознавания формы, которая применяется для генерации наложения для направления хирургического инструмента или устройства в соответствии с одним вариантом осуществления;
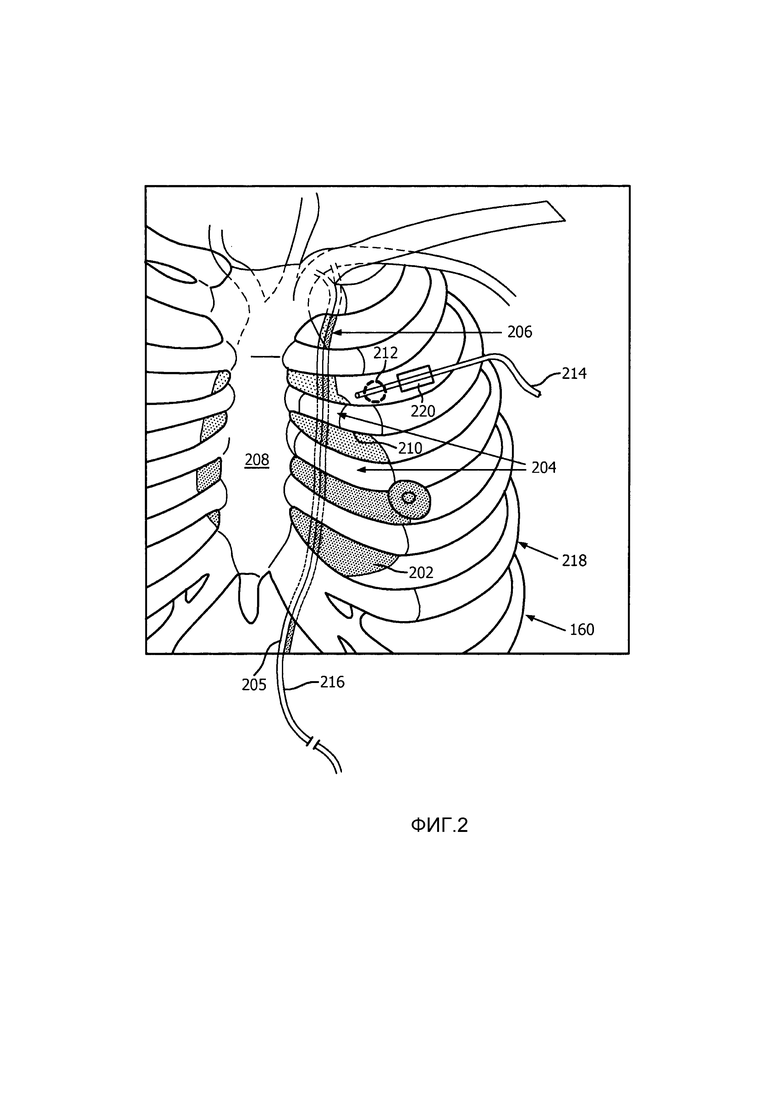
фиг. 2 - схема, демонстрирующая систему распознавания формы, введенную в кровеносный сосуд пациента и эндоскоп, введенный через порт в пациента в соответствии с одним иллюстративным вариантом осуществления;
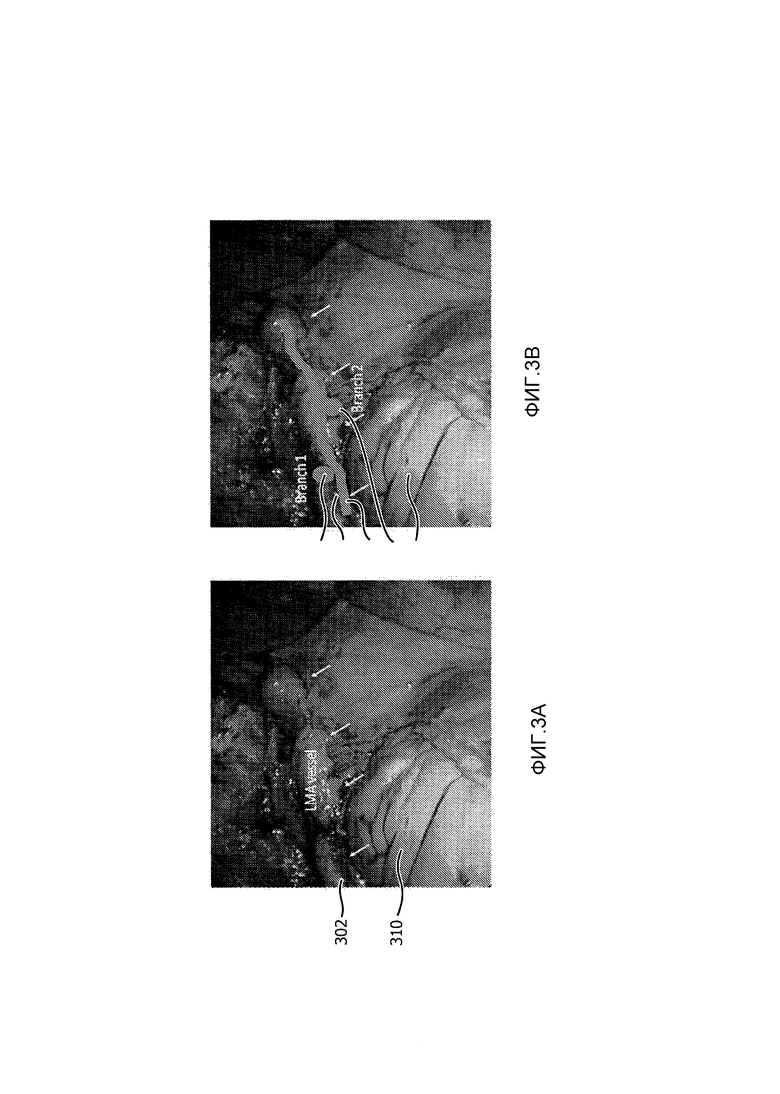
фиг. 3A - изображение, демонстрирующее, внутреннюю грудную артерию (ВГА), иссекаемую через порт с использованием эндоскопа;
фиг. 3B - изображение, демонстрирующее внутреннюю грудную артерию (ВГА), показанную на фиг. 3A, с которым совмещено изображение с наложением в соответствии с одним иллюстративным вариантом осуществления; и
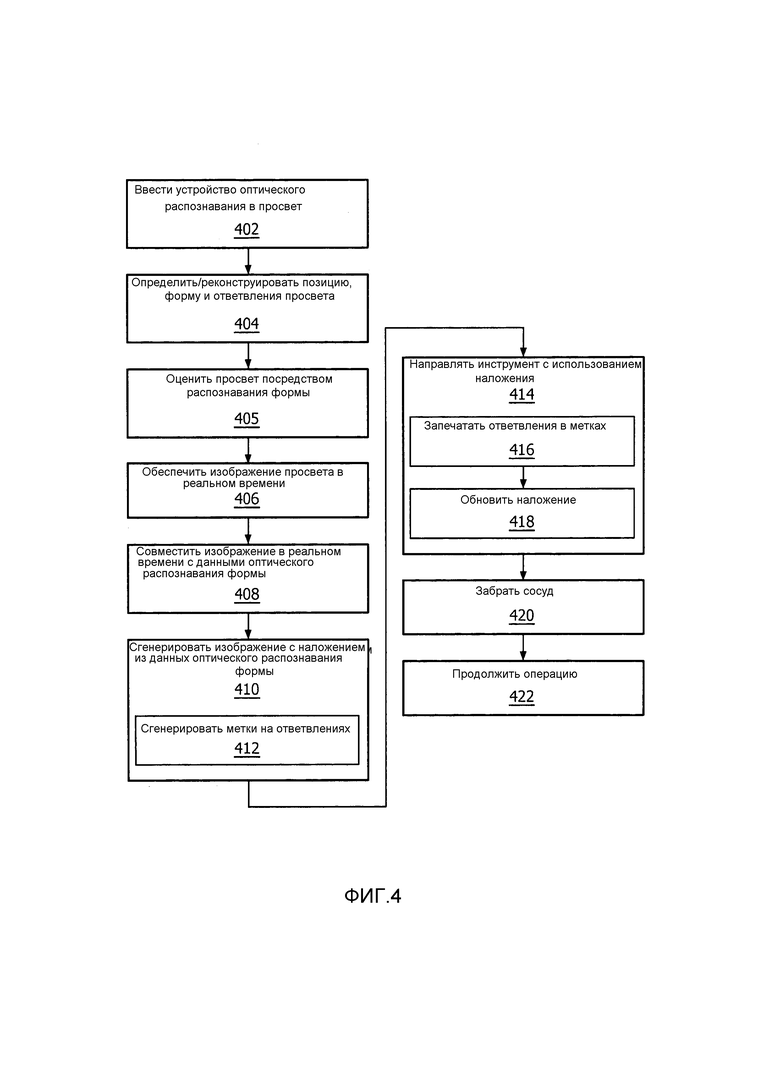
фиг. 4 - блок-схема операций, демонстрирующая способ осуществления доступа к ответвлениям просвета с использованием данных оптического распознавания формы в соответствии с иллюстративным вариантом осуществления.
В соответствии с настоящими принципами, предусмотрены системы и способы, где применяется технология оптоволоконного распознавания формы и определения местоположения (FOSSL) для улучшения и упрощения аортокоронарного обходного шунтирования (АКШ) или других хирургических операций. Технология FOSSL или оптическое волокно распознавание формы делает оптические волокна чувствительными к деформации и температуре. Суррогатные переменные, например, расход, воспаление, давление/отек ткани, контакт тканей и т.д., можно измерять косвенно (с использованием, в случае расхода, например, температурных градиентов индикаторного раствора). Волокна, будучи внедрены в сосуд, могут обеспечивать 3D форму и динамику сосудистой сети, а также информацию расхода в помощь обнаружению ответвлений и бифуркаций.
В одном варианте осуществления, операция осуществляется с использованием оптоволоконного устройства распознавания формы для внутрипросветного применения, введенного в сосуд, подлежащий иссечению, например, левую внутреннюю грудную артерию (ЛВГА). Получается трехмерная (3D) реконструкция информации формы и расхода сосуда (полученной из волока(он) распознавания формы), которая позволяет осуществлять вычисления для определения местоположения боковых ответвлений. Совмещение между системой координат распознавания формы и системой координат роботизированного эндоскопа можно осуществлять для наложения сосуда, подлежащего иссечению, и его ответвлений с данными 3D реконструкции на основе датчика формы на эндоскопическое изображение. Визуальное сервоуправление роботизированного эндоскопа можно осуществлять на основании либо выбранных точек на эндоскопическом изображении, либо точек реконструкции на основе 3D датчика формы.
Следует понимать, что настоящее изобретение будет описано применительно к медицинским инструментам для осуществления шунтирования или другим операциям по пересадке ткани; однако принципы настоящего изобретения гораздо шире и применимы к любой внутренней операции. В некоторых вариантах осуществления, настоящие принципы применяются в трекинге или анализе сложных биологических или механических систем. В частности, настоящие принципы применимы к внутренним процедурам трекинга биологических систем, операциям на всех участках тела, например, легких, желудочно-кишечном тракте, органах выделения, кровеносных сосудах и т.д. Элементы, изображенные на фигурах, можно реализовать в различных комбинациях оборудования и программного обеспечения и обеспечивают функции, которые могут быть объединены в едином элементе или нескольких элементах.
Функции различных элементов, показанных на фигурах, можно обеспечивать путем использования специализированного оборудования, а также оборудования, способного выполнять программное обеспечение, совместно с надлежащим программным обеспечением. Будучи обеспечены процессором, функции могут обеспечиваться единым специализированным процессором, единым совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина “процессор” или “контроллер” не следует рассматривать как относящееся исключительно к оборудованию, способному выполнять программное обеспечение, и может неявно включать в себя, без ограничения, оборудование в виде цифрового сигнального процессора (“DSP”), постоянной памяти (“ПЗУ”) для хранения программного обеспечения, оперативной памяти (“ОЗУ”), энергонезависимого хранилища и т.д.
Кроме того, все, что сказано здесь в отношении принципов, аспектов и вариантов осуществления изобретения, а также их конкретных примеров, призвано охватывать их структурные и функциональные эквиваленты. Дополнительно, предполагается, что такие эквиваленты включают в себя известные в настоящее время эквиваленты, а также эквиваленты, которые станут известны в будущем (т.е. любые выявленные элементы, которые осуществляют одну и ту же функцию, независимо от конструкции). Таким образом, например, специалистам в данной области техники очевидно, что представленные здесь блок-схемы представляют принципиальные виды иллюстративных системных компонентов и/или схемы, реализующей принципы изобретения. Аналогично, очевидно, что любые блок-схемы операций, логические блок-схемы и пр. представляют различные процессы, которые могут быть, по существу, представлены в компьютерно-считываемых носителях данных и выполняться компьютером или процессором, независимо от того, показан ли в явном виде такой компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта доступного с компьютерно-используемого или компьютерно-считываемого носителя данных, обеспечивающего программный код для использования компьютером или совместно с ним или любой системой выполнения инструкций. В целях этого описания, компьютерно-используемый или компьютерно-считываемый носитель данных может представлять собой любое устройство, которое может включать в себя, сохранять, передавать, распространять или транспортировать программу для использования системой выполнения инструкций, устройством или приспособлением или совместно с ней/ним. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством или приспособлением) или средой распространения. Примеры компьютерно-считываемого носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, сменную компьютерную дискету, оперативную память (ОЗУ), постоянную память (ПЗУ), жесткий магнитный диск и оптический диск. Современные примеры оптических дисков включают в себя компакт-диск, предназначенный только для чтения (CD-ROM), компакт-диск с возможностью чтения/записи (CD-R/W), Blu-Ray™ и DVD.
Обращаясь к чертежам, в которых сходные ссылочные позиции представляют одинаковые или аналогичные элементы и, первоначально, к фиг. 1, система 100 для мониторинга просвета, например, кровеносного сосуда, с использованием устройств с возможностью распознавания формы, иллюстративно показана в соответствии с одним вариантом осуществления. Система 100 может включать в себя рабочую станцию или консоль 112, откуда осуществляется контроль и/или управление операцией. Рабочая станция 112 предпочтительно включает в себя один или более процессоров 114 и память 116 для хранения программ и приложений. В памяти 116 может храниться модуль 115 оптического распознавания и интерпретации, выполненный с возможностью интерпретации сигналы оптической обратной связи от устройства или системы 104 распознавания формы. Модуль 115 оптического распознавания выполнен с возможностью использования обратной связи по оптическому сигналу (и любой другой обратной связи, например, электромагнитного (ЭМ) трекинга) для реконструкции деформаций, отклонений и других изменений, связанных с медицинским устройством или инструментом 102 и/или окружающей его областью. Медицинское устройство 102 может включать в себя катетер, проволочный направитель, зонд, эндоскоп, робот, электрод, фильтровальное устройство, баллонное устройство или другой медицинский компонент и т.д.
Модуль 115 оптического распознавания может включать в себя модели и/или статистические методы 140 для оценивания данных распознавания формы для обеспечения геометрических соотношений и состояний устройства или системы 104 распознавания формы. Статистические методы 140 могут включать в себя известные алгоритмы, предназначенные для оценивания данных распознавания формы для определения расхода и других характеристик оцениваемых структур. Система 104 распознавания формы на устройстве 102 включает в себя один или более оптических волокон 126, которые подключены к устройству 102 в заданном шаблоне или шаблонах. Оптические волокна 126 подключаются к рабочей станции 112 посредством кабельного соединения 127. Кабельное соединение 127, при необходимости, может включать в себя волоконную оптику, электрические соединения, другие инструментальные средства и т.д.
Система 104 распознавания формы с волоконной оптикой может быть создана на датчиках в виде волоконной брэгговской решетки. Волоконная брэгговская решетка (ВБР) это короткий отрезок оптического волокна, который отражает конкретные длины волны света и пропускает все остальные. Это достигается путем добавления периодического изменения показателя преломления в сердцевине волокна, которое генерирует диэлектрическое зеркало, зависящее от длины волны. Таким образом, волоконную брэгговскую решетку можно использовать как встраиваемый оптический фильтр для блокирования определенных длин волны или как отражатель, зависящий от длины волны.
Фундаментальным принципом, лежащим в основе работы волоконной брэгговской решетки, является френелевское отражение на каждой из границ раздела, где показатель преломления изменяется. Для некоторых длин волны, отраженный свет различных периодов находится в фазе, благодаря чему, существует конструктивная интерференция для отражения и, следовательно, деструктивная интерференция для пропускания. Брэгговская длина волны чувствительна к деформации, а также к температуре. Это означает, что брэгговские решетки можно использовать в качестве распознающих элементов в оптоволоконных датчиках. В датчике на основе ВБР, измеряемая величина (например, деформация) обуславливает сдвиг в брэгговской длине волны.
Одно преимущество этого подхода состоит в том, что различные чувствительные элементы могут быть распределены вдоль волокна. Включение трех или более сердцевин с различными датчиками (измерительными приборами) на протяжении волокна, которое внедрено в структуру, позволяет точно определять трехмерную форму такой структуры, обычно с точностью выше 1 мм. На протяжении волокна, в различных позициях, может располагаться большое количество датчиков на основе ВБР (например, 3 или более сердцевин распознающего волокна). Из измерения деформация каждой ВБР, в этой позиции можно вывести кривизну структуры. Из большого количества измеренных позиций, определяется полная трехмерная форма.
В порядке альтернативы волоконным брэгговским решеткам, в традиционном оптическом волокне можно использовать собственное обратное рассеяние. Один такой подход предусматривает использование релеевское рассеяние в стандартном одномодовом передающем волокне. Релеевское рассеяние происходит в результате случайных флуктуаций показателя преломления в сердцевине волокна. Эти случайные флуктуации можно моделировать в виде брэгговской решетки со случайным изменением амплитуды и фазы вдоль решетки. Благодаря использованию этого эффекта в трех или более сердцевинах, проходящих на протяжении единого отрезка многосердцевинного волокна, можно следовать 3D форме и динамике поверхности, представляющей интерес.
Устройство 102 можно вводить в просвет, например, кровеносный сосуд 131. Например, кровеносный сосуд 131 может включать в себя кровеносный сосуд, подлежащий забору, например, внутреннюю грудную артерию (ВГА), подкожную вену, лучевую артерию или любой другой пригодный кровеносный сосуд. Порт и/или разрез можно применять для осуществления доступа к внутреннему пространству просвета и введения устройства 102, включающего в себя устройство 104 распознавания формы с распознающим(и) волокном(ами) 126. Устройство 104 распознавания формы собирает данные позиции кровеносного сосуда 131. Это включает в себя мониторинг движения вследствие кровотока и температурных флуктуаций вследствие кровотока. Изменения или флуктуации, обусловленные кровотоком, можно отслеживать и/или накапливать с течением времени для обеспечения карты ответвлений 162. Статистические методы или модели 140 в модуле 115 оптического распознавания могут косвенно вычислять положения ответвлений 162 на кровеносном сосуде 131.
В одном варианте осуществления, эндоскоп или роботизированный эндоскоп 150 включает в себя камеру 156, установленную на нем для передачи внутренних изображений на дисплей 118. Эндоскоп 150 и/или камеру 156 можно вводить через порт 158 или разрез, обеспеченный на пациенте 160. Эндоскоп 150 или камера 156 включает в себя систему координат 152. Устройство 104 распознавания формы также имеет свою собственную систему координат 138. Эти системы координат 138 и 152 могут быть совмещены, чтобы данные обратной связи от устройства распознавания формы можно было применять для навигации эндоскопа или роботизированного эндоскопа 150.
В одном примере, способ совмещения, осуществляемый модулем 136 совмещения или совместно с ним, можно применять для совмещения информации из распознающего волокна 126 устройства 104 с эндоскопическими изображениями 142. В этом случае, система координат 138 волокно совмещается с системой координат 152 камеры 156 эндоскопа, после калибровки камеры 156. Одним способом сделать это будет наведение эндоскопа 150 на 3D фантом и затем использование способа 3D реконструкции (в технике известно много таких способов) для реконструкции поверхности фантома. Затем распознающее волокно 126 можно использовать для “касания” одной и той же поверхности фантома реконструируя свою собственную 3D форму. Затем обе формы должны совмещаться модулем 136 совмещения с использованием такого способа, как, например, итерационный метод ближайших точек (ICP), который применяется для минимизации разности между двумя облаками точек. ICP часто используется для реконструкции 2D или 3D поверхностей из разных результатов сканирования, для совмещения анатомических моделей, и т.д. ICP будет обеспечивать матрицу преобразования между двумя системами координат. Можно предложить и другие способы совмещения.
В ходе операции, устройство 102, снабженное устройством 104 распознавания формы, вводится в кровеносный сосуд 131 и накапливает данные позиции, где устройство 104 распознавания находилось в сосуде 131. Динамические изменения регистрируются. Динамические изменения можно косвенно измерять с использованием разностей температур, движения кровеносного сосуда, жесткости кровеносного сосуда и т.д. В соответствии с настоящими принципами, данные распознавания формы, полученные устройством 104 распознавания формы, помогают хирургу визуализировать ответвления, отходящие от сосуда 131, которые в противном случае были бы скрыты, что будет описано ниже.
Рабочая станция 112 включает в себя дисплей 118 для просмотра внутренних изображений пациента 160 с наложениями данных распознавания кровеносного сосуда 131. Изображение 134 с наложением может генерироваться модулем 148 генерации изображения, который принимает данные распознавания формы от модуля 115 оптического распознавания и переносит динамически данные в реальном времени в изображении 134 с наложением. Изображение 134 с наложением совмещается с эндоскопическим изображением 142, полученным камерой 156, с использованием модуля 136 совмещения. Изображение 134 с наложением может включать в себя указатели или другие индикаторы, указывающие хирургу или роботу, где существуют ответвления 162 для кровеносного сосуда 131. Когда хирург режет и прижигает или защемляет ответвления 162, изображение 134 с наложением обновляется на основании данных кровотока, собранных устройством 104 распознавания формы. Таким образом, хирург может без труда видеть, остались ли необработанные ответвления 162, или даже кровоточат ли еще какие-либо ранее отрезанные ответвления 162 и требуют ли они дополнительного внимания.
После осуществления наложения, хирург может выбирать положение ответвления, и робот 164 может перемещать эндоскоп 150 таким образом, чтобы ответвление располагалось в центре отображаемого изображения (например, посредством визуального сервоуправления). В одном варианте осуществления, робот 164 может перемещать эндоскоп 150 вдоль кровеносного сосуда 131 и посещать каждое ответвление 162 и гарантировать, что запечатывание каждого ответвления 162 завершено. В другом варианте осуществления, эндоскоп 150 может перемещаться сначала вдоль одной стороны артерии, и затем вдоль другой стороны. В другом варианте осуществления, количество ответвлений, выявленных оптическим устройством 104 распознавания формы, может отображаться на дисплее 118 в эндоскопическом изображении 142 (например, в изображении может отображаться количество (или отсчет) запечатанных ответвлений). Поскольку измерение расхода осуществляется непрерывно, количество может обновляться по мере того, как хирург запечатывает боковые ответвления.
Дополнительно, врач может выбирать положение ответвления на 3D предоперационном изображении (например, полученном в результате КТ-сканирования), и робот 164 может перемещать эндоскоп 150 таким образом, чтобы ответвление находилось в центре эндоскопического изображения 142. В этом случае, врач будет выбирать положение на 3D представлении или изображении 134 с наложением сосуда 131 из волоконного датчика (которое будет включать в себя положение ответвления из измерений расхода), и эндоскоп 150 будет перемещаться таким образом, чтобы ответвление находилось в центре изображения. Таким образом, даже если ответвления непосредственно не видно, хирург знает, что оно располагается под жиром и фасцией, и может найти его инструментами.
В другом варианте осуществления, желаемые длину и форму пересаживаемого сосуда можно получить из предоперационных изображениях, например, рентгеновских коронарных ангиограмм или результатов КТ-сканирования, с использованием, например, система 110 формирования изображений. Предоперационные изображения можно собирать заранее с применением системы 110 формирования изображений системы 100 или собирая предоперационные изображения в другом положении или с использованием другой системы. В ходе забора, измерение волоконным датчиком с использованием устройства 104 распознавания формы можно использовать для нахождения участков иссекаемого сосуда, идеальных с точки зрения заранее определенного списка требований к пересаживаемому сосуду. Диаметр может запрашиваться устройством 104, которое включено в проволочный направитель, или другим устройством (102). Таким образом, получаются облака точек, пока устройство 102 с устройством 104 распознавания формы маневрирует в сосуде 131. Пространственная протяженность точек в облаке будет обеспечивать оценку диаметра иссекаемого сосуда.
В еще одном варианте осуществления, устройство 102 с возможностью распознавания формы, например проволочный направитель, может излучать детектируемое излучение (в видимом или ближнем инфракрасном (ИК) диапазоне), которое может регистрироваться камерой эндоскопа (например, камерой на ПЗС) 156, что, например, может осуществляться для трекинга вне организма в отводе оптической когерентной томографии (ОКТ), применяемом к забранным артериальным образцам. ОКТ это способ получения и обработки оптического сигнала, который захватывает трехмерные изображения микронного разрешения из сред оптического рассеяния (например, биологической ткани). Таким образом, конечную позицию устройства 102 можно видеть через ткань собираемого сосуда, указывающую положение в ходе маневрирования и окончательного позиционирования устройства 102. Это можно использовать как дополнительный способ совмещения разных координатных пространств, ограничений по забору или для указания ‘запрещенных’ областей, во избежание повреждения забранной ткани.
Система 100 может включать в себя или также применяться с другими устройствами и инструментами. Например, инструмент 166 прижигание может включать в себя встроенное(ые) волокно(а) 168 распознавания формы. Инструмент 166 может включать в себя внутрисосудистое гибкое удлиненное радиочастотное (РЧ) или лазерное прижигающее устройство, которое может действовать либо в одном положении, либо пространственно распределенным образом вдоль сосуда. На основании измерений расхода/формы из встроенного волокна 168, прижигающий коллектор (надувной баллон, фильтр, сетка или зубцы) могут (полу)автоматически согласовываться с формой просвета сосуда 131 для намеченной доставки РЧ или фотокоагуляционной терапии, ограниченной боковыми ответвлениями 162, одновременно поддерживая просвет главного сосуда патент.
В другом варианте осуществления, волокно(а) 170 распознавания формы могут быть объединены с миниатюрным внутрисосудистым зондом 172 формирования изображения который обеспечивает дополнительную обратную связь по сосудистой анатомии и физиологии. Этот зонд 172 может включать в себя фотоакустические датчики 174, которые весьма чувствительны к контрастности крови, ультразвуковые датчики, инфракрасные датчики для спектроскопии ткани и отличения жира и крови от других тканей и т.д. Обратную связь волокна распознавания формы и расхода можно использовать для приведения в движение внутрипросветного устройства с роботизированным управлением (не показано) для прижигания боковых ответвлений.
Дисплей 118 позволяет пользователю взаимодействовать с рабочей станцией 112 и ее компонентами и функциями или любым другим элементом в системе 100. Этому дополнительно способствует интерфейс 120, который может включать в себя клавиатуру, мышь, джойстик, тактильное устройство или любое другое периферийное устройство или орган управления, с помощью которого пользователь может осуществлять обратную связь и взаимодействие с рабочей станцией 112.
Согласно фиг. 2, схема, где показана грудная клетка 218 пациента 160, демонстрирует иллюстративную установку в соответствии с одним вариантом осуществления. Пациент изображен без мышечной ткани, что позволяет видеть внутренние признаки. Под грудиной 208 располагается сердце 202. Левая внутренняя грудная артерия (ЛВГА) 206 и вена 205 показаны проходящими под ребрами 204 с многочисленными ответвлениями 210, которые во многих случаях проходят под ребрами 204. ЛВГА 206 необходимо удалить из стенки грудной клетки, чтобы использовать в сердечном шунтировании.
Оптоволоконное устройство 216 распознавания формы вводится в ЛВГА 206 для помощи в иссечении сосуда в ходе минимально инвазивного сердечного шунтирования. Устройство 216 распознавания формы вводится в сосуд 206, который будет удален и использован для аортокоронарного шунтирования. Следует понимать, что настоящие принципы также можно применять к другим сосудам, широко используемым в сердечном шунтировании или другом шунтировании. В случае ЛВГА 206, устройство 216 можно вводить с использованием смешанного хирургического-внутрипросветного подхода. Устройство 216 может включать в себя катетер, который можно вводить через порт или порты в минимально инвазивной (МИ) хирургии, и малый разрез в артерии можно использовать для проталкивания устройства 216 в артерию 206.
Когда устройство 216 на месте, устройство 216 будет обеспечивать информацию о 3D форме сосуда 206, а также информацию расхода в каждой точке оптического волокна в устройстве 216. Наличие ответвлений 210 приводит к отводу части потока от главного сосуда 206, и, таким образом, может быть точно обнаружено с использованием оптоволоконных датчиков устройства 216. В частности, оптические волокна способны распределять распознавание объемного расхода вдоль своей длины.
В едином сосуде без точек ответвления, объемный расход на его протяжении является непрерывным и однородным вдоль средней линии сосуда в стационарных условиях. При наличии бокового ответвления, объемный расход будет падать на протяжении волоконного датчика. Статистические методы для обнаружения изменения можно применять к измерению распределенного объемного расхода вдоль длины датчика для идентификации участков выше по течению и ниже по течению каждого положения бокового ответвления. Таким образом, 3D реконструкция сосуда совместно с положениями ответвлений будет получена, как описано выше.
Например, эндоскоп 214 можно вводить в порт 212 для обеспечения изображений сосуда 206. Данные распознавания формы могут накладываться в отображаемом изображении для указания ответвлений 210, чтобы хирург мог находить и оценивать каждое ответвление 210. Поскольку эта информация является динамической, можно также оценивать качество прижигания артерий, когда имеет место иссечение ЛВГА. Таким образом, хирург может знать, полностью ли запечатано ответвление 210, в реальном времени.
Информация расхода и 3D формы сосуда 206 накладывается на эндоскопические изображения посредством операции совмещения. Таким образом, когда хирург переходит к иссечению сосуда из стенки грудной клетки с использованием длинных инструментов, введенных в порты (например, 212), форма сосуда и положение ответвлений 210 наблюдаются на эндоскопическом изображении для помощи в иссечении сосуда и гарантирования, что все ответвления 210 надлежащим образом отрезаны и запечатаны.
Существует несколько способов совмещения для наложения сосудов на эндоскопическое изображение, которые можно использовать. Например, способ дополненной реальности в видеозаписи некалиброванного эндоскопа можно применять путем наложения структур и 3D моделей из других режимов формирования изображения. При этом применяется построение 3D изображения сосуда ЛВГА на основании информации распознавания формы, и указание положений ответвлений в позициях снижения расхода. Затем этот реконструированный 3D сосуд накладывается на эндоскопическое изображение.
Поскольку эндоскоп 214 может быть механически соединен с роботизированной системой 220 (в порядке примера показанной на фиг. 2), относительную позицию эндоскопического изображения в роботизированной системе координат можно получить посредством операций калибровки эндоскоп, известных в технике. В порядке альтернативы калибровке, которая может создавать проблемы технологического процесса в ходе операции, роботизированную систему 220 можно наводить с использованием некалиброванного способа.
Согласно фиг. 3A, показан эндоскопический вид ЛВГА 302, указанной белыми стрелками. Некоторые из ее ответвлений скрыты под фасцией 310. В ходе сердечного шунтирования, сосуд, например ЛВГА 302, удаляется из тела пациента и используется для шунтирования атеросклеротического сужения в коронарных артериях. Важным этапом этой операции является иссечение сосуда, подлежащего использованию в аортокоронарном шунтировании, который часто находится в грудной клетке, ноге или руке. Сосуд должен быть хорошо законсервирован в ходе иссечения, чтобы гарантировать адекватный кровоток после шунтирования. При минимально инвазивном сердечном шунтировании, прямого доступа к этим сосудам нет, и они удаляются с использованием длинных инструментов, введенных в порты. Многочисленные ответвления этих сосудов следует отрезать и защемлять для остановки потенциальной утечки, когда происходит шунтирование. Поскольку эти сосуды часто бывают внедрены в жир и фасцию 310, ответвления часто могут быть пропущены, в результате чего, они могут быть по невнимательности отрезаны, но не защемлены или не заблокированы.
На фиг. 3B показан другой эндоскопический вид ЛВГА 302, указанной белыми стрелками. Изображение 306 с наложением ЛВГА 302 включает в себя указатели 304 и 308 для указания ответвлений. С использованием роботизированного наведения или ручного наведения, изображение 306 с наложением с указателями 304 и 308 применяется для визуализации и указания ответвлений, которые в противном случае были бы заглублены или заблокированы от наблюдения тканью. Изображение 306 с наложением генерируется с использованием обратной связи распознавания формы от устройства распознавания формы, введенного в ЛВГА 302.
Хотя описанные здесь варианты осуществления относятся к минимально инвазивному аортокоронарному обходному шунтированию, допустимы другие применения и ситуации, когда эндоскопическая хирургия осуществляется на кровеносных сосудах или применяется для удаления сосуда из тела пациента. Кроме того, настоящие принципы можно применять в других хирургических операциях в других частях тела или в механических системах, в том числе, но без ограничения, обучающихся моделях, двигателях, водопроводных системах и т.д.
Согласно фиг. 4, способ визуализации разветвленного просвета показан в соответствии с иллюстративными вариантами осуществления. Хотя разветвленный просвет может включать в себя кровеносный сосуд, следует понимать, что разветвленный просвет может включать в себя и другие структуры. Например, разветвленный просвет может включать в себя другие живые ткани (например, бронхиолы) или механические структуры (например, водопровод, и т.д.). Иллюстративные варианты осуществления, описанные со ссылкой на фиг. 4, относятся к хирургическим операциям и, в частности, к иссечению кровеносного сосуда. На блоке 402, после надлежащей подготовки, оптоволоконное устройство распознавания формы вводится в просвет кровеносного сосуда и т.п. Оптоволоконное устройство распознавания формы располагается в кровеносном сосуде, подлежащем забору.
На блоке 404, позиция просвета и положения ответвлений от просвета определяются на основании изменений расхода в просвете. Эти изменения обусловлены флуктуациями, порожденными деформацией, измеренными оптоволоконным устройством распознавания формы. В одном варианте осуществления, геометрия и/или форма просвета реконструируется в виде трехмерной структуры, включающей в себя ответвления. Статистический метод можно применять для обнаружения изменений расхода на протяжении длины просвета для обнаружения ответвлений.
В одном варианте осуществления, кровеносный сосуд можно оценивать с использованием оптоволоконного устройства распознавания формы для определения участка кровеносного сосуда, пригодного для операции реваскуляризации, на блоке 405. Можно применять и другие критерии выбора кровеносного сосуда или другого просвета.
На блоке 406, по меньшей мере, часть просвета изображается для обеспечения изображения в реальном времени. Формирование изображения можно обеспечивать с использованием наблюдательного прибора (например, эндоскоп) с камерой или другим устройством формирования изображения. Наблюдательный прибор можно вводить в пациента для сбора изображения через порт. Наблюдательный прибор может иметь роботизированное управление. На блоке 208, изображение в реальном времени совмещается с позицией просвета, измеренной оптоволоконным устройством распознавания формы (данные распознавания формы). На блоке 410, изображение с наложением, указывающее позицию просвета и положения ответвлений, генерируется на изображении в реальном времени. Оно может отображаться на дисплее. В одном варианте осуществления, просвет включает в себя разветвленный кровеносный сосуд, подлежащий забору для операции шунтирования. Просвет может включать в себя ответвления, невидимые из-за окружающих тканей. Изображение с наложением обеспечивает указатели на наложении в положениях ответвлений, чтобы сделать ответвления видимыми на блоке 412.
На блоке 414, инструмент может направляться роботом в, по меньшей мере, одно из положений ответвлений, указанных в наложении. Когда он наведен на положение ответвления, можно осуществлять множество разных процедур или операций. Роботизированное наведение может использовать способ визуального сервоуправления для центровки эндоскопического изображения на изображении с наложением. При наведении роботом или человеком также могут применяться другие методы трекинга просвета. В одном примере, на блоке 416, ответвления в просвете, указанные наложением, запечатываются. Это может включать в себя прижигание, защемление, и т.д. ответвлений кровеносного сосуда. Поскольку изображение с наложением определяется данными распознавания формы, которые включают в себя информацию положения ответвления, наложение может обновляться с использованием данных распознавания формы для указания, запечатаны ли ответвления, на блоке 418. На блоке 420, кровеносный сосуд забирается и подготавливается для реваскуляризации в шунтировании или другой хирургической операции. На блоке 422, операция продолжается, например, для завершения иссечения или других задач.
Интерпретируя нижеследующую формулу изобретения, следует понимать, что:
a) слово "содержащий" не исключает наличия других элементов или действий помимо перечисленных в данном пункте;
b) употребление наименования элемента в единственном числе не исключает наличия множества таких элементов;
c) никакие ссылочные позиции в формуле изобретения не ограничивают ее объем;
d) несколько "средств" может быть представлено одним и тем же предметом или структурой или функцией, реализованной аппаратно или программно; и
e) никакой конкретной последовательности действий не предусмотрено, если она конкретно не указана.
В отношении описания предпочтительных вариантов осуществления навигации с помощью оптоволоконного датчика для визуализации и мониторинга сосудов (которые приведены в порядке иллюстрации, но не ограничения), заметим, что специалисты в данной области техники могут предложить их модификации и вариации, исходя из вышеописанных принципов. Таким образом, следует понимать, что изменения можно вносить в конкретные раскрытые варианты осуществления раскрытия, которые входят в объем раскрытых здесь вариантов осуществления, обозначенный нижеследующей формулой изобретения. Таким образом, исходя из подробного описания и положений патентного законодательства, заявленный предмет изобретения, подлежащий защите патентной грамотой, изложен в нижеследующей формуле изобретения.
Группа изобретений относится к медицинской технике, а именно к оптическим волокнам распознавания формы в медицинских приложениях. Способ визуализации разветвленного просвета содержит этапы, на которых вводят оптоволоконное устройство распознавания формы в просвет, собирают данные расхода потока в просвете, определяют изменения просвета, обусловленные ответвлениями, выявленными посредством деформации, указывают положения ответвлений и направляют инструмент в положения ответвлений. На втором этапе определяют позицию просвета и положения ответвлений от просвета, изображают участок просвета для обеспечения изображения в реальном времени, совмещают изображение в реальном времени с позицией просвета и генерируют изображение с наложением. Система для мониторинга кровеносного сосуда содержит процессор, память, подключенный к процессору модуль распознавания и интерпретации, хранящийся в памяти и выполненный с возможностью интерпретации данных оптоволоконного распознавания формы из оптоволоконного устройства распознавания формы, модуль генерации изображения и дисплей, выполненный с возможностью визуализации изображения с наложением поверх представления кровеносного сосуда. Использование группы изобретений позволяет расширить арсенал средств для идентификации ответвлений просвета в кровеносных сосудах. 3 н. и 25 з.п. ф-лы, 4 ил.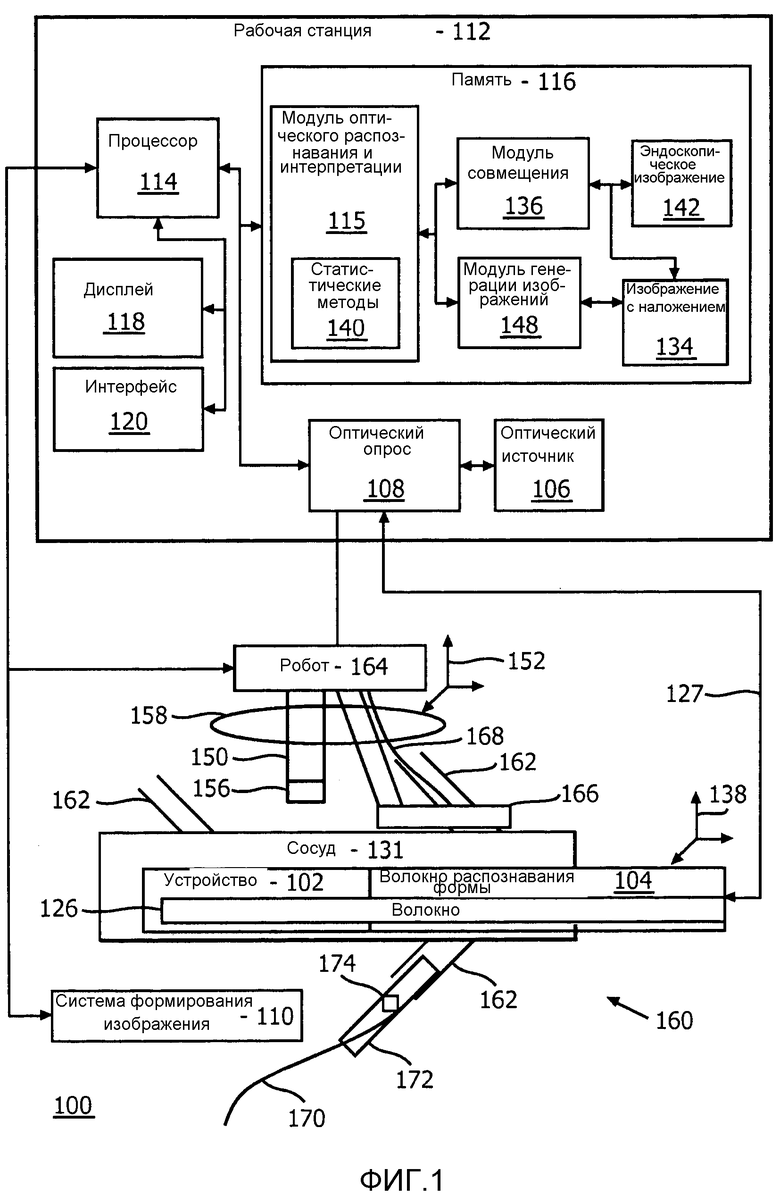
1. Способ визуализации разветвленного просвета, содержащий этапы, на которых:
вводят (402) оптоволоконное устройство распознавания формы в просвет;
собирают, посредством оптоволоконного устройства распознавания формы, данные расхода потока в просвете;
определяют положения ответвлений посредством определения (404) изменений расхода в просвете, обусловленных ответвлениями, из данных расхода, выявленных посредством деформации, создаваемой в оптоволоконном устройстве распознавания формы;
указывают (410) положения ответвлений на представлении просвета; и
направляют (414) инструмент в положения ответвлений, указанные на представлении.
2. Способ по п. 1, в котором просвет включает в себя кровеносный сосуд, и введение (402) оптоволоконного устройства распознавания формы включает в себя позиционирование оптоволоконного устройства распознавания формы в кровеносный сосуд.
3. Способ по п. 1, в котором определение (404) изменений просвета включает в себя применение статистического метода для обнаружения изменений расхода на протяжении длины просвета для обнаружения ответвлений.
4. Способ по п. 1, в котором указание (410) положений ответвлений на представлении просвета включает в себя этапы, на которых:
обеспечивают (406) изображение просвета;
генерируют (410) наложение на изображении просвета на основании данных распознавания формы; и
указывают (412) положение ответвлений на изображении просвета с использованием наложения.
5. Способ по п. 4, дополнительно содержащий этап, на котором запечатывают (416) ответвления в просвете, указанные наложением.
6. Способ по п. 5, дополнительно содержащий этап, на котором обновляют (418) наложение с использованием данных распознавания формы для указания, запечатаны ли ответвления.
7. Способ по п. 1, в котором просвет включает в себя разветвленный кровеносный сосуд, подлежащий забору (420), для операции шунтирования.
8. Способ по п. 1, в котором просвет включает в себя ответвления, невидимые из-за окружающих тканей, и этап указания положений ответвлений на представлении просвета включает в себя обеспечение (412) указателей в положениях ответвлений, которые невидимы из-за окружающих тканей, для выявления их положения.
9. Способ по п. 1, в котором просвет включает в себя кровеносный сосуд, и способ дополнительно содержит этап, на котором оценивают (405) кровеносный сосуд с использованием оптоволоконного устройства распознавания формы для определения участка кровеносного сосуда, пригодного для операции реваскуляризации.
10. Способ визуализации разветвленного просвета, содержащий этапы, на которых:
вводят (402) оптоволоконное устройство распознавания формы в просвет;
определяют (404) позицию просвета и положения ответвлений от просвета на основании изменений расхода в просвете, обусловленных флуктуациями, вызванными деформацией, измеренными оптоволоконным устройством распознавания формы;
изображают (406) участок просвета для обеспечения изображения в реальном времени;
совмещают (408) изображение в реальном времени с позицией просвета, измеренной оптоволоконным устройством распознавания формы; и
генерируют (410) изображение с наложением, указывающее позицию просвета и положения ответвлений на изображении в реальном времени.
11. Способ по п. 10, в котором просвет включает в себя кровеносный сосуд, и введение (402) оптоволоконного устройства распознавания формы включает в себя позиционирование оптоволоконного устройства распознавания формы в кровеносный сосуд.
12. Способ по п. 10, в котором определение (404) позиции просвета и положений ответвлений от просвета включает в себя применение статистического метода для обнаружения изменений расхода на протяжении длины просвета для обнаружения ответвлений.
13. Способ по п. 10, в котором изображение (406) участка просвета для обеспечения изображения в реальном времени включает в себя введение наблюдательного прибора через порт для формирования изображения участка просвета.
14. Способ по п. 10, дополнительно содержащий этап, на котором запечатывают (416) ответвления в просвете, указанные наложением.
15. Способ по п. 14, в котором запечатывание (416) ответвлений в просвете включает в себя прижигание или защемление ответвлений кровеносного сосуда.
16. Способ по п. 14, дополнительно содержащий этап, на котором обновляют (418) наложение с использованием данных распознавания формы для указания, запечатаны ли ответвления.
17. Способ по п. 10, в котором просвет включает в себя разветвленный кровеносный сосуд, подлежащий забору (420), для операции шунтирования.
18. Способ по п. 10, в котором просвет включает в себя ответвления, которые невидимы из-за окружающих тканей, и этап генерации изображения с наложением включает в себя обеспечение (412) указателей на наложении в положениях ответвлений, чтобы сделать ответвления видимыми.
19. Способ по п. 10, в котором просвет включает в себя кровеносный сосуд, и способ дополнительно содержит этап, на котором оценивают (405) кровеносный сосуд с использованием оптоволоконного устройства распознавания формы для определения участка кровеносного сосуда, пригодного для операции реваскуляризации.
20. Способ по п. 10, дополнительно содержащий этап, на котором направляют (414) инструмент с помощью робота в, по меньшей мере, одно из положений ответвлений, указанных в наложении.
21. Система для мониторинга кровеносного сосуда, содержащая:
процессор (114);
память (116), подключенную к процессору;
модуль (115) распознавания и интерпретации, хранящийся в памяти и выполненный с возможностью интерпретации данных оптоволоконного распознавания формы из оптоволоконного устройства (104) распознавания формы, введенного в кровеносный сосуд, причем данные распознавания формы определяют ответвления кровеносного сосуда;
модуль (148) генерации изображения, хранящийся в памяти и выполненный с возможностью генерации изображения (134) с наложением на основании данных оптоволоконного распознавания формы, указывающих форму кровеносного сосуда и положения ответвлений от кровеносного сосуда; и
дисплей (118), выполненный с возможностью визуализации изображения с наложением поверх представления (142) кровеносного сосуда для обеспечения руководства по визуализации ответвлений кровеносного сосуда, причем
оптоволоконное устройство (104) распознавания формы определяет позицию кровеносного сосуда и положения ответвлений на основании изменений расхода в кровеносном сосуде, обусловленных флуктуациями, порожденными деформацией, измеренными оптоволоконным устройством распознавания формы.
22. Система по п. 21, в которой представление (142) включает в себя изображение кровеносного сосуда, собранное с использованием эндоскопа, и изображение (134) с наложением совмещается с изображением кровеносного сосуда.
23. Система по п. 22, дополнительно содержащая робота (164), выполненного с возможностью направлять один или более инструментов в соответствии с изображением с наложением.
24. Система по п. 23, в которой робот (164) направляется с использованием способа визуального сервоуправления в соответствии с изображением с наложением.
25. Система по п. 23, в которой один или более инструментов включает в себя инструмент (166) для запечатывания ответвлений кровеносного сосуда.
26. Система по п. 25, в которой изображение (134) с наложением обновляется для указания, какие ответвления запечатаны.
27. Система по п. 21, дополнительно содержащая статистический метод (140) для обнаружения изменений расхода на протяжении длины просвета для обнаружения ответвлений.
28. Система по п. 21, в которой изображение (134) с наложением включает в себя указатели (304, 308) в положениях ответвлений для идентификации положений ответвлений.
| US 2004097805 A1, 20.05.2004 | |||
| US 2012071894 A1, 22.03.2012 | |||
| ЭНДОВАЗАЛЬНЫЙ МИНИ-РОБОТ | 2002 |
|
RU2218191C2 |

