Настоящее изобретение относится к медицинским инструментам и в частности к устройствам, системам и способам для применения в области медицины для усовершенствования индивидуализированного для пациента совмещения положений проходов.
Минимально инвазивную хирургическую операцию выполняют с использованием удлиненных инструментов, вводимых в тело пациента через небольшие проходы(портов). Размещение проходов имеет большое значение для результата хирургической операции. Стандартные клинические руководства определяют точки входа относительно общеизвестных анатомических ориентиров. Например, при кардиохирургической операции используют ребра, грудь и сосок и заданные расстояния от приведенных признаков. Правило данного типа не учитывает анатомического изменения, обусловленного размерами пациента или присутствующей патологии. При планировании прохода на основании допроцедурных наборов данных остаются расхождения с клиническим исполнением из-за сложной задачи выполнения планов в реальных случаях.
На фиг. 1 изображена наглядная схема 10 для минимально инвазивной кардиохирургической операции. В приведенном примере, эндоскоп 12 и два инструмента 14 и 16 введены через ребра 18 в полость 20 тела через небольшие проходы 15, которые могут иметь размер от около 5 мм до около 100 мм. В клинической практике проходы 15 выбирают с помощью руководств, опубликованных профессиональными ассоциациями, больницами или изготовителями хирургического оборудования. Руководства определяют точки входа относительно анатомических ориентиров, например, ребер, груди, соска, расстояние между данными признаками и от них и т.п. Однако, как правило, руководство упомянутого типа не учитывает изменчивость анатомии, размера пациента, особенности заболевания пациента и т.п. Поэтому, возможно, полезно индивидуализировать размещение прохода на пациенте, что минимизирует связанные с доступом повреждение тканей и время процедур, при одновременном улучшении результатов.
Индивидуализированное для пациента планирование прохода облегчает вмешательства с возможностью сокращения времени процедур и частоты осложнений при улучшении результатов. В стандартной клинической практике, проходы для хирургического доступа выбирают с использованием стандартных руководств. Отсутствие индивидуализированной для пациента оптимизации может привести к тому, что инструменты, установленные в субоптимальный проход, возможно, не достанут до всех интересующих зон. Данный недостаток, в свою очередь, продлит время вмешательства и увеличит объем хирургической операции, выполняемой для достижения намеченных участков. Внутрипроцедурное выполнение индивидуализированной для пациента оптимизации прохода доступа остается нерешенной задачей.
После того, как инструменты, например, 12, 14 и 16 вводят в полость 20 тела, инструменты 12, 14 и 16 можно перемещать по четырем степеням свободы (DOF) - двум углам поворота вокруг прохода 15 (точки вращения), дополнительно к введению и вращению. В то время как вращение и введение интуитивно понятны и удобны в работе, установление соответствия между углами и эндоскопическим изображением менее интуитивно понятно, требует длительного времени для изучения и, как показывают исследования, представляет наибольшую сложность при координации движения руки и глаза в процессе минимально инвазивной хирургической операции.
Решению проблемы размещения прохода уделялось много внимания. Разработаны компьютерные алгоритмы для вычисления оптимальных проходов для инструментов на основании дооперационных трехмерных медицинских изображений (например, изображений, полученных методом компьютерной томографии (КТ), магнитно-резонансной томографии (МРТ) и т.п.). В процессе последующего перевода оптимальных планов в операционную основное внимание уделялось применению стандартных технологий сопровождения инструментов, известных из хирургической навигации. Однако, в данном случае остаются расхождения с клиническим исполнением из-за неинтуитивного характера манипуляций инструментом при эндоскопическом наведении. Способы, предложенные в известном уровне техники, основанные на оптимизации размещения проходов с помощью допроцедурной визуализации и традиционной технологии сопровождения (например, позиционирования на основе оптических камер, работающих в ближнем инфракрасном диапазоне, позиционирования на основе компьютерного зрения, электромагнитного позиционирования), не достаточно удобны для применения в стандартной клинической практике.
Оптимизация размещения проходов до хирургической операции на основе дооперационной трехмерной визуализации может оказаться устаревшей, как только начинается хирургическая операция. Например, при кардиохирургической операции, левое легкое спадает, и сердце может быть остановлено с использованием сердечно-легочного насоса, что приводит к изменению расположения органов. Кроме того, проходы планируют по отношению к дооперационным изображениям, а не по отношению к эндоскопическому видеоизображению, несмотря на то, что эндоскопия является единственной визуальной обратной связью в реальном времени, доступной хирургу во время вмешательства. Практическое индивидуализированное для пациента планирование проходов требует значительных непроизводительных затрат времени и свидетельствует об ограниченном клиническом применении инструментальных средств имитационного моделирования в хирургии к настоящему времени. Кроме того, традиционные системы сопровождения, обычно, подвергаются длительной настройке в операционной и нуждаются в тщательной калибровке. В случае, когда на последних стадиях хирургической операции сопровождение не применяют, клинические непроизводительные затраты, необходимые для подготовки, могут быть недопустимыми. Хотя местоположения размещения проходов задают и ограничивают точки введения интервенционных инструментов и эндоскопических датчиков, тем не менее, существует потребность в интуитивной обратной связи, имеющей отношение к тому, как инструменты следует ориентировать для достижения конкретных зон в эндоскопических изображениях, что отсутствует в современных процедурах. Следовательно, существует потребность в усовершенствованном позиционировании инструментов и манипуляции ими во время интервенционных процедур.
В соответствии с настоящими принципами, позиционирующее устройство содержит первый участок, имеющее первое отверстие для совмещения с точкой входа в проход. Второй участок можно позиционировать для совмещения относительно первого отверстия по множеству различных положений. Исполнительный механизм соединен по меньшей мере с одним из первого участка и второго участка для установки относительных положений первого и второго участков, чтобы позволить совместить ось инструмента, образованную между первым и вторым участками, через первое отверстие таким образом, чтобы инструмент, предусмотренный на оси инструмента, имел известные положение и ориентацию.
Другое позиционирующее устройство включает в себя первую пластину, имеющую первое отверстие для совмещения с точкой входа в проход, и вторую пластину, имеющую второе отверстие для совмещения с первым отверстием. Исполнительный механизм соединен с по меньшей мере одной из первой пластины и второй пластины и установлен с обеспечением возможности совмещения оси инструмента через первое и второе отверстия таким образом, чтобы инструмент, предусмотренный на оси инструмента, проходил через точку входа в проход с известными положением и ориентацией.
Еще одно позиционирующее устройство содержит первую разрезную дугу, шарнирно соединенную с основанием, и вторую разрезную дугу, шарнирно соединенную с основанием и расположенную ортогонально первой разрезной дуге. Канал проходит через прорезь в первой разрезной дуге и прорезь во второй разрезной дуге для совмещения канала с центром поворота, соответствующим точке входа в проход таким образом, что поворотом оси инструмента управляют посредством поворотов первой и второй разрезных дуг, чтобы обеспечить совмещение с известными положением и ориентацией оси инструмента.
Способ позиционирования инструментов содержит этап размещения устройства визуализации в первом проходе в пациенте; этап определения положения второго прохода для инструмента; этап установки пациенту позиционирующего и ориентирующего устройства, при этом позиционирующее и ориентирующее устройство включает в себя по меньшей мере два отверстия в регулируемых положениях для совмещения оси инструмента по второму проходу; и этап позиционирования инструмента вдоль оси инструмента через по меньшей мере два отверстия в соответствии с полем зрения устройства визуализации.
Приведенные и другие задачи, признаки и преимущества настоящего изобретения станут очевидными из нижеприведенного подробного описания наглядных вариантов осуществления изобретения, которое следует рассматривать в связи с прилагаемыми чертежами.
Настоящее раскрытие предмета изобретения представляет ниже на рассмотрение подробное описание предпочтительных вариантов осуществления со ссылкой ни следующие фигуры, на которых:
Фиг. 1 - схема, представляющая установку для минимально инвазивной кардиохирургической операции в соответствии с известным уровнем техники;
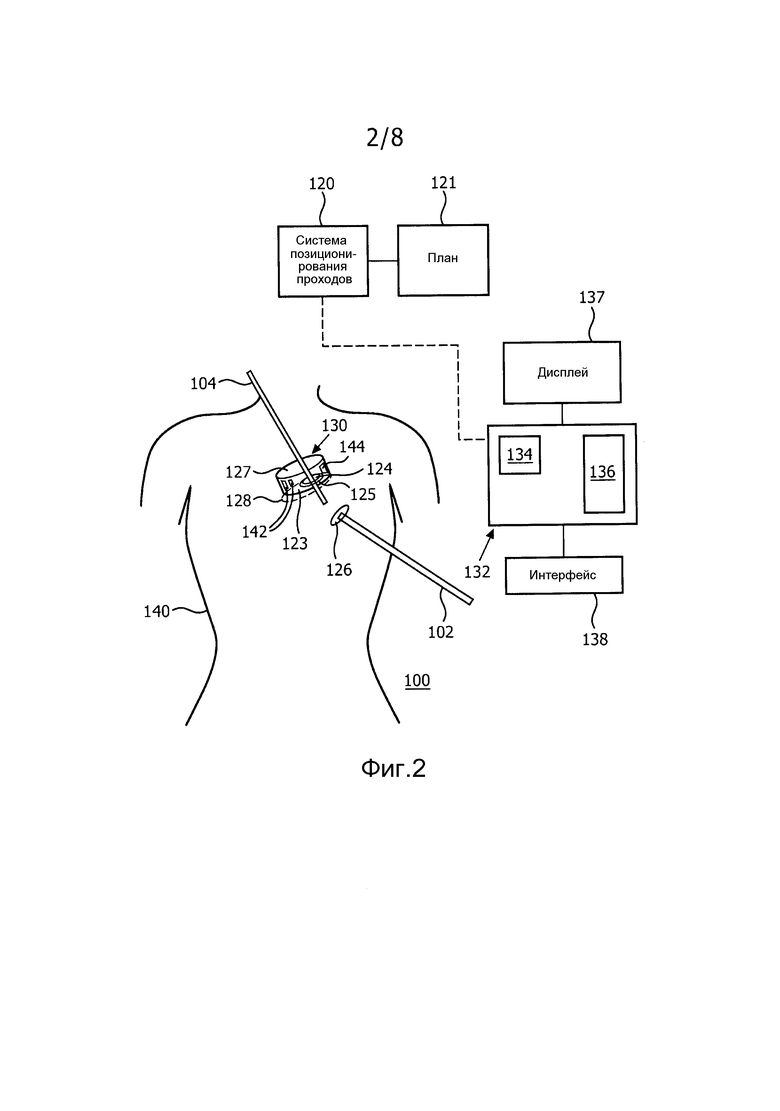
Фиг. 2 - схема, представляющая установку для минимально инвазивной кардиохирургической операции, использующую позиционирующее и ориентирующее устройство в соответствии с настоящими принципами;
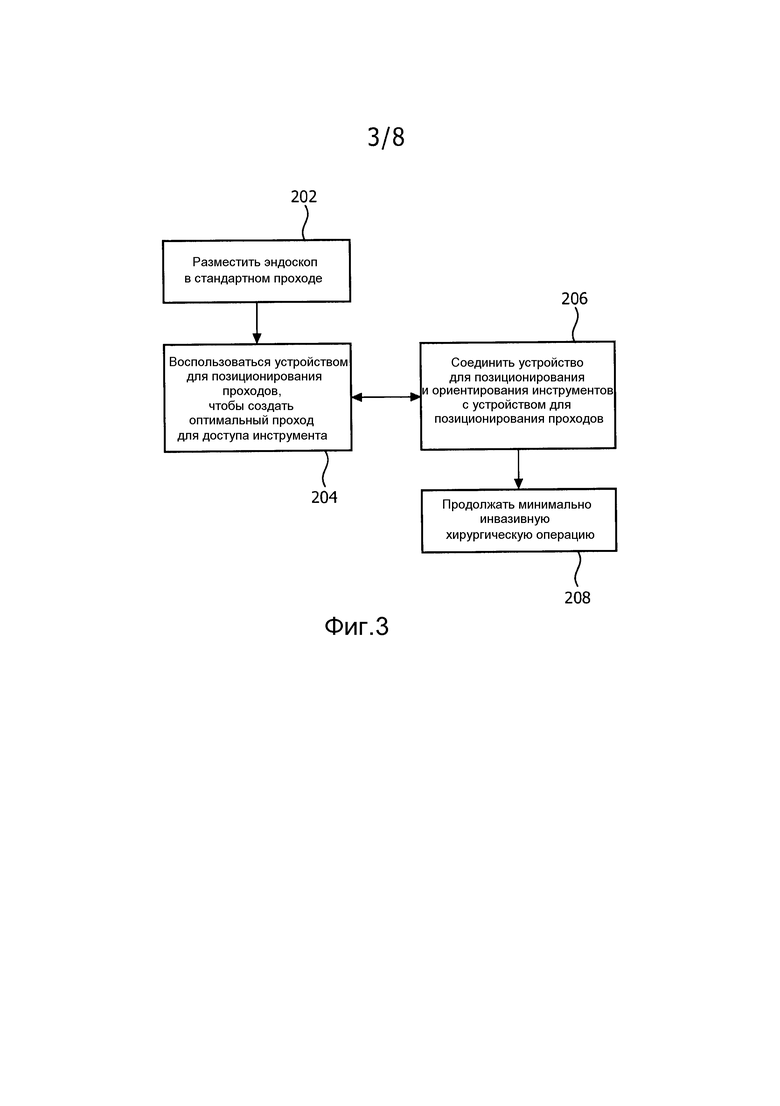
Фиг. 3 - блок-схема, представляющая последовательность клинических операций в соответствии с одним вариантом осуществления;
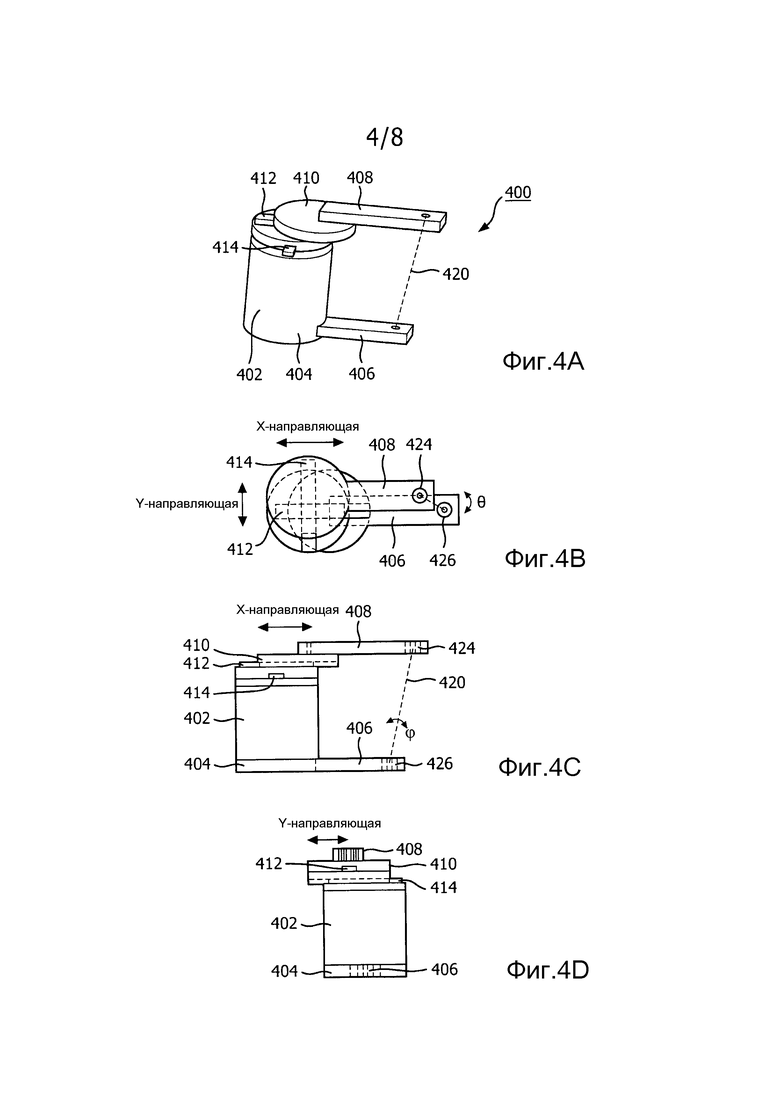
Фиг. 4A - вид в перспективе позиционирующего и ориентирующего устройства в соответствии с одним вариантом осуществления;
Фиг. 4B - вид сверху устройства, показанного на фиг. 4A;
Фиг. 4C - вид сбоку устройства, показанного на фиг. 4A;
Фиг. 4D - вид сзади устройства, показанного на фиг. 4A;
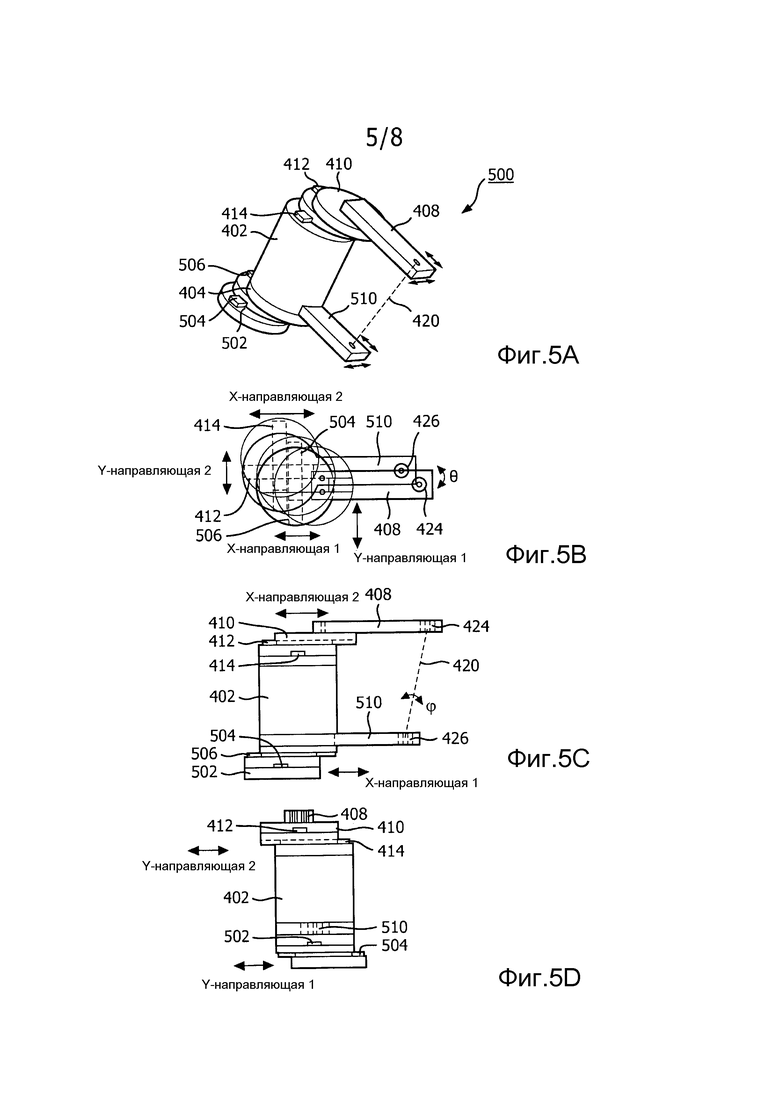
Фиг. 5A - вид в перспективе другого позиционирующего и ориентирующего устройства в соответствии с другим вариантом осуществления;
Фиг. 5B - вид сверху устройства, показанного на фиг. 5A;
Фиг. 5C - вид сбоку устройства, показанного на фиг. 5A;
Фиг. 5D - вид сзади устройства, показанного на фиг. 5A;
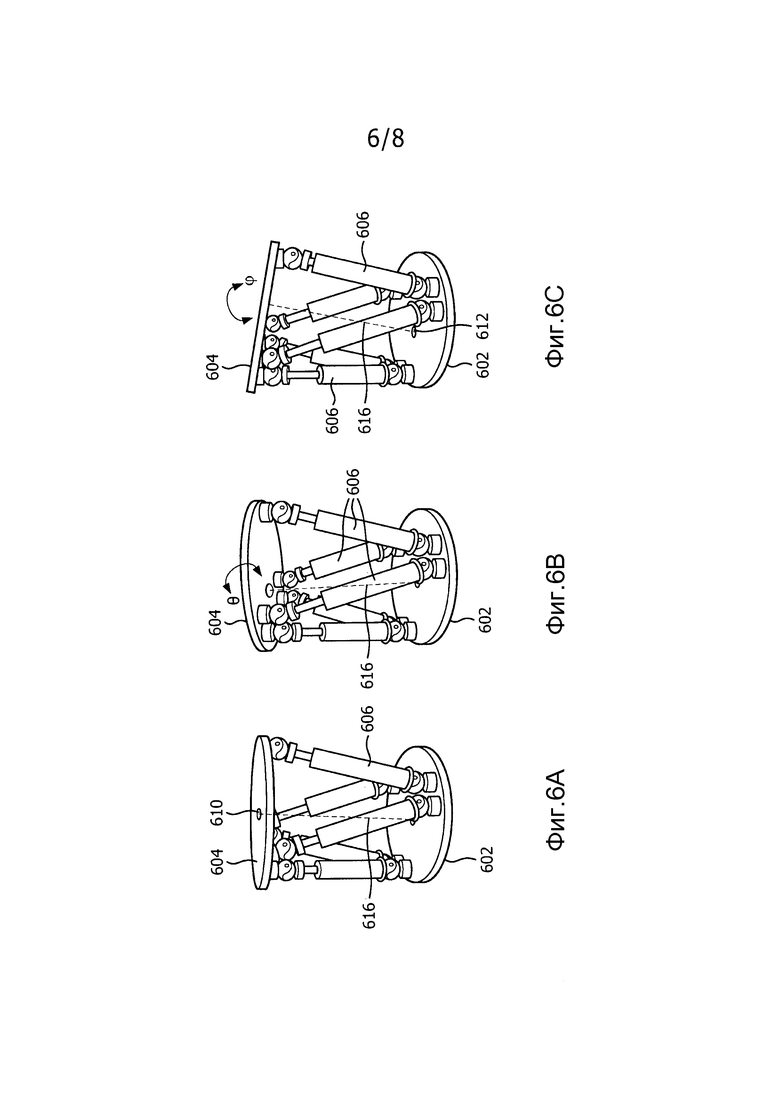
Фиг. 6A - вид в перспективе еще одного позиционирующего и ориентирующего устройства в соответствии с другим вариантом осуществления;
Фиг. 6B - другой вид в перспективе, представляющий первый поворот верхней пластины устройства, показанного на фиг. 6A;
Фиг. 6C - другой вид в перспективе, представляющий второй поворот верхней пластины устройства, показанного на фиг. 6A;
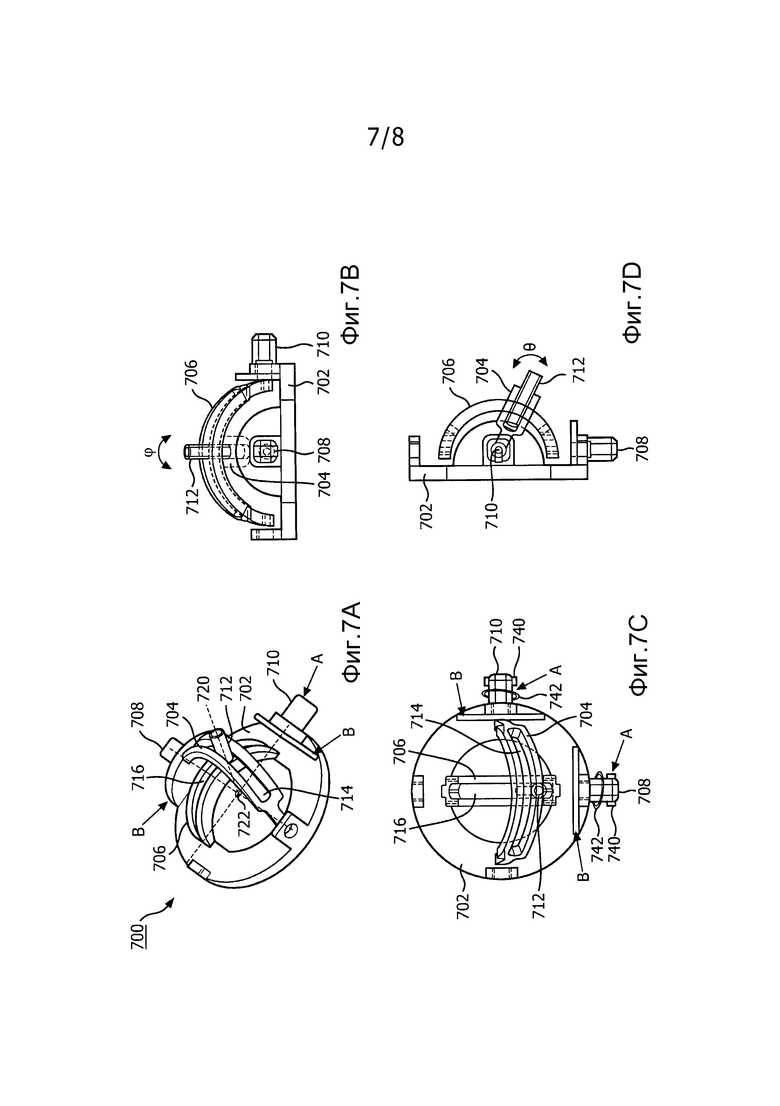
Фиг. 7A - вид в перспективе еще одного позиционирующего и ориентирующего устройства в соответствии с другим вариантом осуществления;
Фиг. 7B - вид сверху устройства, показанного на фиг. 7A;
Фиг. 7C - вид сбоку устройства, показанного на фиг. 7A;
Фиг. 7D - другой вид сбоку устройства, показанного на фиг. 7A; и
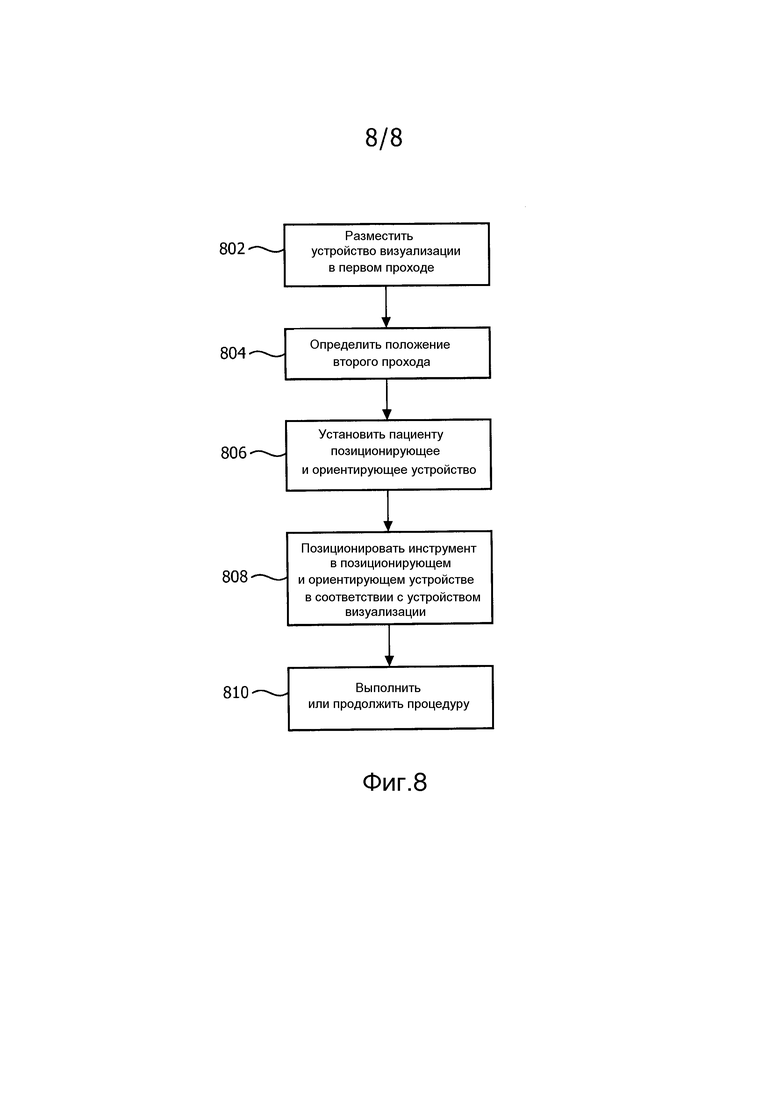
Фиг. 8 - блок-схема последовательности операций способа позиционирования инструментов в соответствии с наглядным вариантом осуществления.
В соответствии с настоящими принципами предлагаются схемы расположения для позиционирования и ориентирования хирургического инструмента относительно эндоскопического устройства, устройства визуализации или другого инструмента. Индивидуализированное для пациента планирование проходов требует знания положения интервенционного инструмента и управления им относительно эндоскопа, дополнительно к визуализации положения и пути хирургического инструмента, с наложением на эндоскопическое изображение. Индивидуализированный для пациента план проходов можно также осуществлять при знании положения интервенционного инструмента и управления им относительно внешнего устройства сопровождения, выставленного относительно пациента, включая, но без ограничения, способы электромагнитного сопровождения, оптические способы сопровождения, способы сопровождения на основе камеры, оптическое измерение формы и т.п. или устройство интра-операционной визуализации.
Следует понимать, что последующее описание настоящего изобретения приведено на примере медицинских инструментов; однако, идеи настоящего изобретения намного шире и применимы к любым инструментам. В некоторых вариантах осуществления, настоящие принципы используются при сопровождении или анализе сложных биологических или механических систем. В частности, настоящие принципы применимы к процедурам, внутренним по отношению к биологическим системам, процедурам во всех зонах тела, например, легких, желудочно-кишечном тракте, выделительных органах, кровеносных сосудах и т.п. Элементы, изображенные на фигурах, могут быть исполнены в виде различных сочетаний аппаратного обеспечения и программного обеспечения и обеспечивают функции, которые могут быть объединены в одном элементе или нескольких элементах.
Функции различных элементов, показанных на фигурах, можно обеспечить с использованием специализированного программного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение, в сочетании с подходящим программным обеспечением. При обеспечении процессором, функции могут обеспечиваться одним специализированным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, применение в явной форме термина «процессор» или «контроллер» не следует истолковывать как относящееся только аппаратному обеспечению, способному выполнять программное обеспечение, термин может в неявной форме включать в себя, без ограничения, аппаратное обеспечение цифрового сигнального процессора («DSP»), постоянную память («ROM») для хранения программного обеспечения, оперативную память («RAM»), энергонезависимое запоминающее устройство и т.п.
Кроме того, все формулировки в настоящем описании, перечисляющие принципы, аспекты и варианты осуществления изобретения, а также конкретные их примеры предназначены для охвата как конструктивных, так и функциональных эквивалентов упомянутых вариантов осуществления. Кроме того, предполагается, что упомянутые эквиваленты включают в себя как современные известные эквиваленты, так и эквивалентны, которые будут разработаны в будущем (т.е. любые разработанные элементы, которые выполняют такую же функцию, независимо от конструкции). Таким образом, например, специалистам в данной области техники будет очевидно, что блок-схемы, представленные в настоящей заявке, представляют концептуальные изображения наглядных системных компонентов и/или схем, использующих принципы изобретения. Аналогично, следует понимать, что любые блок-схемы последовательностей операций способов, схемы последовательностей процессов и т.п. представляют различные процессы, которые могут быть по существу представлены на машиночитаемом носителе и, следовательно, выполнены компьютером или процессором, независимо от того, показан ли в явной форме или нет такой компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступного с используемого компьютером или машиночитаемого носителя, обеспечивающего программный код для использования непосредственно или в связи с компьютером или любой системой выполнения команд. В контексте настоящего описания используемый компьютером или машиночитаемый носитель может быть любым устройством, которое может содержать, хранить, передавать, распространять или транспортировать программу для использования непосредственно или в связи с системой, устройством или средством выполнения команд. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством, или средством) или средой распространения. Примеры машиночитаемого носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), жесткий магнитный диск и оптический диск. Текущие примеры оптических дисков включают в себя постоянную память на компакт-диске (CD-ROM), перезаписываемый компакт-диск (CD-R/W), диск Blu-Ray™ и цифровой видеодиск (DVD).
Далее на чертежах, на которых одинаковые ссылочные позиции представляют одни и те же или подобные элементы, и исходно на фиг. 2 наглядно показана установка 100 для минимально инвазивной кардиохирургической операции в соответствии с одним вариантом осуществления. В приведенном примере, эндоскопически направляемая хирургическая операция включает в себя применение системы 120 позиционирования проходов в реальном времени, с программным обеспечением и аппаратным обеспечением, которая дает возможность планирования, прогнозирования и измерения положения хирургического инструмента относительно эндоскопического изображения или потока данных. Система 120 позиционирования проходов показана отдельной от компьютера 132, но может содержаться в компьютере 132 или применяться им. Система 120 позиционирования проходов может использовать известные способы позиционирования положения(ий) 124, 126 проходов и, следовательно, положения и ориентации хирургического инструмента, например, эндоскопа 102 или других инструментов 104. В соответствии с настоящими принципами, к инструменту 104 (или эндоскопу 102) калиброванным методом присоединяют позиционирующее и ориентирующее устройство 130 (показанное в общем виде), чтобы допускать манипуляцию в реальном времени хирургическим инструментом 104 (или 102) относительно потока оперативных данных эндоскопии или другого способа внешнего сопровождения или интра-операционной визуализации. Приспособление или устройство 130, например, представленное здесь, допускает позиционирование хирургического инструмента 102 таким образом, чтобы позиционировать хирургический инструмент 104 в области, выбранной хирургом на эндоскопическом изображении. На пациенте 140 указывают или размещают положение или механизм 128 установки, чтобы идентифицировать положение для устройства 130 или закрепить его.
Позиционирующее устройство 130 содержит первый участок 123, имеющее первое отверстие 125 для совмещения с точкой 124 входа в проход. Второй участок 127 имеет направляющую для совмещения с первым отверстием 125. Исполнительный механизм 142 соединен с по меньшей мере одним из первого участка 123 и/или второго участка 127 и установлен, чтобы допускать центрирование оси инструмента по первому отверстию 125 таким образом, чтобы инструмент 104, обеспеченный на оси инструмента, проходил к индивидуализированному для пациента местоположению в соответствии с планом 121. План 121 может быть создан и сохранен с использованием программного обеспечения и индивидуализированных данных пациента, полученных посредством медицинской визуализации, измерений и т.п.
Посредством обеспечения позиционирующего устройства 130 можно реализовать более надежное местоположение медицинского инструмента в пределах поля зрения устройства визуализации или камеры. Таким образом, индивидуализированную для пациента регулировку можно уверенно и многократно выполнять в реальном времени, что совершенствует размещение инструмента и благоприятный результат в целом интервенционной процедуры. Примерные варианты осуществления схемы расположения/устройства 130 для позиционирования и ориентирования инструмента более подробно поясняются ниже.
На фиг. 3, в продолжение ссылки на фиг. 2, наглядно показана последовательность клинических операций в соответствии с одним вариантом осуществления. На этапе 202, последовательность операций начинается с введения эндоскопа в стандартный проход. На этапе 204, систему 120 позиционирования проходов используют для идентификации и создания оптимального прохода доступа для интервенционного инструмента. На этапе 206, позиционирующее и ориентирующее устройство 130 в соответствии с настоящими принципами применяют либо до, либо после создания оптимального прохода, для закрепления хирургического инструмента в оптимальном местоположении доступа и манипуляции упомянутым инструментом. Затем, на этапе 208 происходит или продолжается хирургическая процедура после установки инструмента в теле, с оперативной обратной связью по чему-то одному из: местоположения интервенционного инструмента, ориентации инструмента, траекторной информации (спрогнозированной и/или фактической), в дополнение к любой другой вспомогательной информации из физиологической контрольной или допроцедурной информации. Данные можно накладывать на изображения потоков данных эндоскопии.
Во время хирургической операции, интервенционные инструменты принимают различные ориентации. Поэтому, полезно обеспечить для хирурга возможность планировать положение/ориентацию инструмента и манипулировать упомянутыми положением/ориентацией с расчетом на множество потенциальных ориентаций. Хирургу также обеспечивается возможность планировать положение/ориентацию инструмента и манипулировать упомянутыми положением/ориентацией после того, как проходы выбраны, для упрощения задач координации движения руки и глаза.
Как показано на фиг. 2, манипуляции устройством 130 в нижеописанных вариантах осуществления могут выполняться вручную, полуавтоматически или автоматически. Компьютерная система 132, включающая в себя процессор 134, память 136, дисплей 137 и пользовательский интерфейс 138 может применяться для управления перемещением устройства 130, поддержки при определении местоположения или размещении устройства 130 относительно местоположения прохода или анатомических ориентиров, а также может применяться для разработки плана или иного обеспечения руководства для пользователя. Упомянутые варианты осуществления, предпочтительно, объединяют со схемами расположения для определения местоположения оптимальных проходов для облегчения минимально инвазивных процедур под эндоскопическим контролем.
Устройство 130 может включать в себя (полу)автоматические электромеханические, электро-оптомеханические исполнительные устройства 142, базирующиеся на системах управления с обратной связью между датчиками 144 и исполнительными устройствами/механизмами 142. Настоящее описание предназначено не в качестве исчерпывающего списка всех возможных схем расположения, а, предпочтительно, для иллюстрации на примере, полезных признаков в соответствии с настоящими принципами. Представляется возможным и предполагается также использование альтернативных вариантов осуществления, схем расположения, конфигураций и т.п.
На фиг. 4A-4D показано позиционирующее и ориентирующее устройство 400 для прохода эндоскопа или другого хирургического устройства в соответствии с одним вариантом осуществления. На фиг. 4A приведен вид в перспективе устройства 400. На фиг. 4B приведен вид сверху устройства 400. На фиг. 4C приведен вид сбоку устройства 400. На фиг. 4D приведен вид сзади устройства 400. Устройство 400 включает в себя две линейных направляющих, X-направляющую 412 и Y-направляющую 414, соединенных с цилиндрической опорой 402. На нижнем участке цилиндрической опоры 402, основание 404 соединяется с телом пациента или с установочным механизмом (не показанным) для той же цели. Как основание 404, так и платформа 410 включать в себя пластину или консоль 406 и 408, соответственно, продолжающуюся от них. Консоль 408 выдерживает фиксированную точку поворота около отверстия 426 участка входа в проход и обеспечивает известную пространственную конфигурацию относительно эндоскопического изображения. Консоль 408 поддерживает вторую точку 424, которая, вместе с фиксированной точкой поворота в отверстии 426 консоли 406 на основании 404 цилиндра 402, задает ось 420, по которой инструмент или иглу можно вводить с конкретной ориентацией в проход. Две точки 424 и 426 выполнены с возможностью поддержки жесткого свободного канала (например, направляющей и т.п.), по которому можно вводить инструмент (не показанный). Каждая из двух точек 424 и 426 может включать в себя сферическую опору, чтобы допускать точное позиционирование инструмента.
Посредством изменения положения двух линейных направляющих (X-направляющей 412 и Y-направляющей 414) можно изменять углы поворота вокруг вертикальной оси и наклона (θ и ϕ) инструмента относительно точки поворота. X- и Y-направляющими 412, 414 можно управлять рукой с использованием ходового винта с ручным рычагом, кодового диска или шкалы движения, или направляющими 412, 414 можно управлять с использованием шагового двигателя или сервоприводной системы с ходовыми винтами и кодовыми датчиками или потенциометрами (смотри также фиг. 2 выше).
На фиг. 5A-5D показано позиционирующее и ориентирующее устройство 500 для прохода эндоскопа или другого хирургического устройства в соответствии с другим вариантом осуществления. На фиг. 5A приведен вид в перспективе устройства 500. На фиг. 5B приведен вид сверху устройства 500. На фиг. 5C приведен вид сбоку устройства 500. На фиг. 5D приведен вид сзади устройства 500. Устройство 500 включает в себя четыре линейных направляющих, X-направляющую 412 и Y-направляющую 414, соединенных с верхом цилиндрической опоры 402, и X-направляющую 506 и Y-направляющую 504, соединенных с основанием 404 цилиндрической опоры 402. На нижнем участке цилиндрической опоры 402, основание 502 соединяется с телом пациента или с установочным механизмом (не показанным) для той же цели.
Внизу цилиндрической опоры 402, консоль 510 выдерживает фиксированную точку 426 поворота в местоположении участка входа в проход. Две нижних линейных направляющих, «X-направляющая 1» 506 и «Y-направляющая 1» 504, расположены в известном положении относительно участка прохода доступа. Линейные направляющие наверху цилиндрической опоры 402, «X-направляющая 2» 412 и «Y-направляющая 2» 414, выполнены с возможностью изменения углов поворота вокруг вертикальной оси и наклона (θ и ϕ) инструмента относительно точки поворота. XY-направляющими можно управлять либо рукой с использованием ходового винта с ручным рычагом в сочетании с кодовым диском или шкалой движения (для обратной связи), либо с использованием шагового двигателя или сервоприводной системы с ходовыми винтами и кодовыми датчиками или потенциометрами, которые формируют (полу)автоматическую систему управления с обратной связью, как поясняется выше. Одно преимущество содержания двух наборов линейных направляющих в данном варианте осуществления включает в себя обеспечение возможности перемещения «точки поворота» (X1, Y1), задаваемой нижними линейными направляющими 506, 504. Данная возможность может быть полезна при совмещении инструмента с местоположением прохода.
Как показано на фиг. 6A-6C, другой вариант осуществления может включать в себя узел 600 платформы Стюарта, которая обеспечивает кинематическую схему для платформы с тремя степенями свободы (DOF). Узел 600 включает в себя платформу 602 основания, которая соединяется с телом пациента или с установочным механизмом (не показанным) для установки на пациенте. Верхняя платформа 604 соединена с платформой 602 основания посредством множества исполнительных механизмов 606, предпочтительно, линейных исполнительных механизмов. Исполнительные механизмы 606 могут быть сгруппированы парами и могут иметь «V-образную» конфигурацию. Исполнительные механизмы 606 можно приводить в действие вручную, или исполнительные механизмы 606 могут включать в себя гидравлические или пневматические цилиндры, электромеханические механизмы и т.п. Исполнительными механизмами 606 можно управлять для обеспечения поворота канала для инструмента, расположенного между платформами 602 и 604 и между исполнительными механизмами 606. Участок платформы 604 основания может включать в себя сквозное отверстие 610 в центре поворота, который можно совмещать с точкой входа в проход. Аналогичный участок верхней платформы 604 может включать в себя сквозное отверстие 612, чтобы допускать проход канала для инструмента. Отверстия 610 и 612 могут включать в себя шаровые опоры, позволяющие осуществлять совмещение в другой конфигурации отверстий 610 и 612.
Посредством перемещения пар исполнительных механизмов 606 между платформами 602 и 604 изменяют углы поворота вокруг вертикальной оси и наклона (θ и ϕ) (фиг. 6B и 6C, соответственно) траектории 616 инструмента относительно центра поворота. Исполнительные механизмы 606 можно перемещать с помощью шагового двигателя или серводвигателей, с использованием позиционных датчиков (не показанных). Исполнительные механизмы 606 могут включать в себя простые ходовые винты, которые можно перемещать вручную или с электро-оптомеханическим управлением, если существует некоторая проприоцепция расстояния для оценки расстояния перемещения по каждой оси.
На фиг. 7A-7D показано позиционирующее и ориентирующее устройство 700 для прохода эндоскопа или другого хирургического устройства в соответствии с другим вариантом осуществления. На фиг. 7A приведен вид в перспективе устройства 700. На фиг. 7B приведен первый вид сбоку устройства 700. На фиг. 7C приведен вид сверху устройства 700. На фиг. 7D приведен второй вид сбоку устройства 700. Устройство 700 включает в себя две разрезных дуги 704 и 706, каждая из которых имеет расположенные по центру прорези 714 и 716, соответственно. Дуги 704 и 706 шарнирно соединены с основанием 702, которое служит корпусом для шарниров осей 708 и 710. Оси 708 и 710 формируют шарнирные соединения и соединены или образованы как одно целое с соответствующими им дугами 704 и 706, чтобы допускать поворот дуг 704 и 706 вокруг осей 708 и 710. Основание 702 соединяется с телом пациента или с установочным механизмом (не показанным) для проведения процедуры с использованием устройства, чтобы позиционировать или ориентировать рабочий канал для эндоскопа или другого инструмента.
Дуги 704, 706 обеспечивают двухосную систему, которая может устанавливать ось 720 инструмента по двум угловым степеням свободы (углу поворота вокруг вертикальной оси и углу наклона, θ и ϕ) относительно центра 722 поворота, расположенного как можно ближе к точке входа в проход. Центр 722 поворота совмещен с трубкой или каналом (например, направляющей) 712, и ось 720 инструмента проходит по каналу 712 и через центр поворота для ввода в пациента через проход, который позиционируют в центре 722 поворота или около данного центра. Устройство 700 может быть присоединено к эндоскопической системе наведения с обеспечением известной геометрии относительно участка входа в проход и потока данных визуализации.
Устройство 700 может включать в себя много возможных разновидностей, примеры которых описаны ниже в неисчерпывающем списке. Устройство 700 может обеспечивать ручное перемещение каждой из двух дуг 704 и 706 для определения местоположения инструмента (оси 720 инструмента) под требуемым углом. Устройство 700 может обеспечивать ручное перемещение двух дуг 704 и 706 для определения местоположения инструмента (оси 720 инструмента), и в точках «A» может находиться стопор 740 (показанный только на фиг. 7C) для иммобилизации (например, предотвращения поворота) дуг 704 и 706, по мере необходимости. Устройство 700 может включать в себя кодовый диск 742 (показанный только на фиг. 7C), без датчика в точках «B», позволяющий осуществлять совмещение дуг 704, 706 по шкале, нанесенной на кодовом диске 742, с возможностью непосредственной визуальной обратной связи по положению каждой дуги. Устройство 700 может включать в себя оптический кодовый датчик или потенциометр для каждой из двух осей, соответствующих осям 708 и 710 в точках «B». Данное решение может обеспечивать позиционную обратную связь по положению каждой из двух дуг 704 и 706 в виде электрического (или оптического) сигнала. Текущее положение может также отображаться на экране или мониторе (дисплей 137)для ориентирования.
Устройство 700 может включать в себя сочетание системы 742 оптического кодового датчика (или потенциометра) с дисплеем на светоизлучающем диоде (СД дисплеем) в точках «B», при этом СД дисплей будет указывать требуемое положение каждой дуги 704, 706 с использованием линейного или подобного индикатора. Таким образом, пользователь может вручную или автоматически устанавливать положения дуг 704, 706, и оптический кодовый датчик (или потенциометр) будет показывать на дисплее 137 текущее положение каждой из дуг 704, 706. Пользователь может совмещать дугу с линией, отображаемой СД.
Устройство 700 может включать в себя шаговый двигатель (не показанный) в каждой из точек «A». Данное решение предоставит возможность механизированного управления позиционированием инструмента. Шаговый двигатель в точках «A» может быть дополнен оптическим кодовым датчиком (или потенциометром), либо расположенным в точках «B», либо включенным в блок шагового двигателя, чтобы обеспечивать позиционную обратную связь, а также механизированное управление. Устройство 700 может включать в себя сервоприводную систему в каждой точке «A», которая может включать в себя электродвигатель и оптический кодовый датчик (или потенциометр) для обеспечения механизированного управления позиционированием инструмента.
Хотя в настоящих вариантах осуществления, основное внимание уделялось управлению угловыми степенями свободы, предполагается также возможность продвижения и поворота инструментов или каналов инструментов. Продвижение и поворот также можно выполнять вручную, полуавтоматически или автоматически. Автоматические продвижение и поворот могут включать в себя применение электродвигателей, тормозов и т.п.
Настоящие варианты осуществления могут быть использованы во множестве различных областей и особенно полезны для минимально инвазивных хирургических операций под эндоскопическим контролем, например, кардиохирургической операции, минимально инвазиного аортокоронарного шунтирования, закрытия дефекта межпредсердной перегородки, пластики/замене клапана, лапароскопической хирургической операции, гистерэктомии, простатэктомии, хирургической операции на желчном пузыре, транслюминальных хирургических операций через естественные отверстия (NOTES), хирургической операции на легких/бронхах, нейрохирургических вмешательств и т.п.
На фиг. 8 наглядно показан другой способ позиционирования инструментов. На этапе 802, устройство визуализации (например, эндоскоп) помещают в первый проход на пациенте. Проход для устройства визуализации можно разместить с использованием методов позиционирования проходов, включающих в себя стандартное размещение, размещение, индивидуализированное для пациента, размещение с оптимизацией прохода и т.п. На этапе 804 определяют положение для второго прохода для инструмента. Данный этап, предпочтительно, включает в себя применение системы позиционирования проходов, чтобы определить установочное положение на пациенте для позиционирующего и ориентирующего устройства. Данная система использует данные конкретного пациента, чтобы выбрать оптимальное положение для размещения позиционирующего и ориентирующего устройства.
На этапе 806 устанавливают пациенту позиционирующее и ориентирующее устройство. Позиционирующее и ориентирующее устройство включает в себя два отверстия с регулируемыми положениями для совмещения оси инструмента со вторым проходом. Позиционирующее и ориентирующее устройство может включать в себя первую пластину, имеющую первое отверстие для совмещения с точкой входа в проход, вторую пластину, имеющую второе отверстие для совмещения с первым отверстием; и исполнительный механизм, соединенный с первой пластиной и второй пластиной или расположенный между ними и установленный с возможностью совмещение оси инструмента через первое и второе отверстия таким образом, чтобы инструмент, обеспеченный на оси инструмента, проходил через индивидуализированное для пациента местоположение в соответствии с планом. Позиционирующее и ориентирующее устройство может включать в себя первую разрезную дугу, шарнирно соединенную с основанием, вторую разрезную дугу, шарнирно соединенную с основанием и расположенную ортогонально по отношению к первой разрезной дуге, и канал, расположенный и проходящий через разрез в первой разрезной дуге и разрез второй разрезной дуги для совмещения канала с центром поворота, соответствующим точке входа в проход, таким образом, что поворотом оси инструмента управляют посредством поворотов первой и второй разрезных дуг, чтобы управлять совмещением с индивидуализированным для пациента местоположением в соответствии с планом. Для позиционирующего и ориентирующего устройства можно также использовать другие конфигурации, например, можно использовать по меньшей мере три пластины или точки позиционирования. Данное решение может включать в себя сочетания элементов, описанных в настоящей заявке, или специализированные инструменты, содержащие или не содержащие регулировочные механизмы для поддержки позиционирования и ориентирования инструментов, включающих в себя эндоскопы, хирургические устройства, иглы и т.п.
На этапе 808, инструмент или инструменты позиционируют вдоль оси инструмента через два отверстия в соответствии с полем зрения устройства визуализации. Возможно наличие нескольких проходов и нескольких позиционирующих и ориентирующих устройств. В предпочтительном варианте, инструменты удерживают в поле зрения камеры или устройства визуализации или в прогнозируемом или известном местоположении для упрощения функций пользователя. Позиционированием и ориентированием инструмента можно управлять с использованием обратной связи по положению и/или ориентации устройства визуализации. Например, устройство визуализации в первом проходе может находиться в плоскости, параллельной инструменту, но с таким отклонением, чтобы инструмент и устройство визуализации были обращены друг к другу. В альтернативном варианте устройство визуализации и инструмент могут быть параллельными, оба обращенными к одной и той же зоне ткани. Возможны также другие конфигурации. На этапе 810, процедуру продолжают или выполняют с использованием инструмента в установленном положении позиционирующего и ориентирующего устройства. Данное установленное положение можно регулировать или перемещать при необходимости (вручную или автоматически) до, во время или после процедуры.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) формулировка «содержащий» не исключает присутствия других элементов или этапов, кроме тех, которые перечислены в данном пункте формулы изобретения;
b) признак единственного числа не исключает присутствия множества упомянутых элементов;
c) никакие ссылочные позиции в формуле изобретения не ограничивают объем охраны формулы изобретения;
d) несколько «средств» могут быть представлены единым элементом или конструкцией или функцией, реализованной аппаратным обеспечением или программным обеспечением; и
e) требования к какой-либо конкретной последовательности этапов не предусмотрено, если не указано специально.
Выше приведено описание предпочтительных вариантов осуществления (которые следует считать иллюстративными, но не ограничивающими) для позиционирования и ориентирования хирургических инструментов при индивидуализированном для пациента размещении проходов, однако, следует отметить, что с учетом вышеописанных принципов специалистами в данной области техники могут быть созданы модификации и изменения. Поэтому, следует понимать, что в раскрытые конкретные варианты осуществления изобретения могут быть внесены изменения, которые находятся в пределах объема раскрытых здесь вариантов осуществления, обозначенного прилагаемой формулой изобретения. Таким образом, выше приведены данные и особенности в соответствии с требованиями патентных законов, а изобретение, которое должно охраняться патентом на изобретение, изложено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ, А ТАКЖЕ ПОЗИЦИОНИРУЮЩИЙ ВСПОМОГАТЕЛЬНЫЙ БЛОК | 2016 |
|
RU2719931C2 |
| ЭНДОСКОП ДЛЯ МИНИМАЛЬНО-ИНВАЗИВНОЙ ХИРУРГИИ, А ТАКЖЕ ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2013 |
|
RU2644281C2 |
| ВРЕМЕННО УСТАНАВЛИВАЕМЫЕ МЕДИЦИНСКИЕ УСТРОЙСТВА | 2009 |
|
RU2508042C2 |
| РОБОТИЗИРОВАННОЕ УПРАВЛЕНИЕ ЭНДОСКОПОМ НА ОСНОВЕ АНАТОМИЧЕСКИХ ПРИЗНАКОВ | 2014 |
|
RU2692206C2 |
| СПОСОБ ВЫБОРА ДОСТУПА ДЛЯ ВЫПОЛНЕНИЯ ОПЕРАТИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2353324C2 |
| УСТРОЙСТВА ДЛЯ УСТАНОВКИ В ЗАДАННОЕ ПОЛОЖЕНИЕ/УДЕРЖИВАНИЯ ИНСТРУМЕНТОВ | 2007 |
|
RU2463014C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2016 |
|
RU2719919C2 |
| НАВИГАЦИЯ С ПОМОЩЬЮ ОПТОВОЛОКОННОГО ДАТЧИКА ДЛЯ ВИЗУАЛИЗАЦИИ И МОНИТОРИНГА СОСУДОВ | 2013 |
|
RU2686954C2 |
| УСТРОЙСТВО ДЛЯ РОБОТ-АССИСТИРОВАННОЙ ХИРУРГИИ | 2015 |
|
RU2704961C2 |
| СПОСОБЫ И АППАРАТ ДЛЯ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ УХА, ГОРЛА, НОСА | 2009 |
|
RU2506056C2 |

Группа изобретений относится к медицинской технике, а именно к средствам позиционирования и ориентирования хирургических инструментов. Устройство содержит опору, первый участок, выступающий из опоры и имеющий первое отверстие для совмещения с точкой входа в проход, второй участок, выступающий из опоры и выполненный с возможностью позиционирования для совмещения с первым отверстием по множеству различных положений, и исполнительный механизм, соединенный по меньшей мере с одним из первого участка и второго участка для установки относительных положений первого участка и второго участка, чтобы позволить совместить ось инструмента, образованную между первым участком и вторым участком через первое отверстие таким образом, чтобы инструмент, предусмотренный на оси инструмента, включал в себя известные положение и ориентацию. Устройство по второму варианту выполнено таким образом, чтобы инструмент, предусмотренный на оси инструмента, проходил через точку входа в проход с известными положением и ориентацией. Способ позиционирования медицинских инструментов для инвазивной хирургии содержит этапы, на которых размещают устройство визуализации в первом проходе в пациенте, определяют положение второго прохода для инструмента, устанавливают пациенту позиционирующее и ориентирующее устройство, при этом позиционирующее и ориентирующее устройство включает в себя по меньшей мере две пластины, выступающие из опоры, причём каждая пластина имеет отверстие и по меньшей мере одно из по меньшей мере двух отверстий имеет регулируемые положения для совмещения оси инструмента по отношению ко второму проходу, и исполнительный механизм для регулирования положений одного из по меньшей мере двух отверстий, и позиционируют инструмент вдоль оси инструмента через по меньшей мере два отверстия в соответствии с полем зрения устройства визуализации. Использование изобретений позволяет расширить арсенал средств для позиционирования и ориентирования хирургических инструментов. 3 н. и 7 з.п. ф-лы, 19 ил.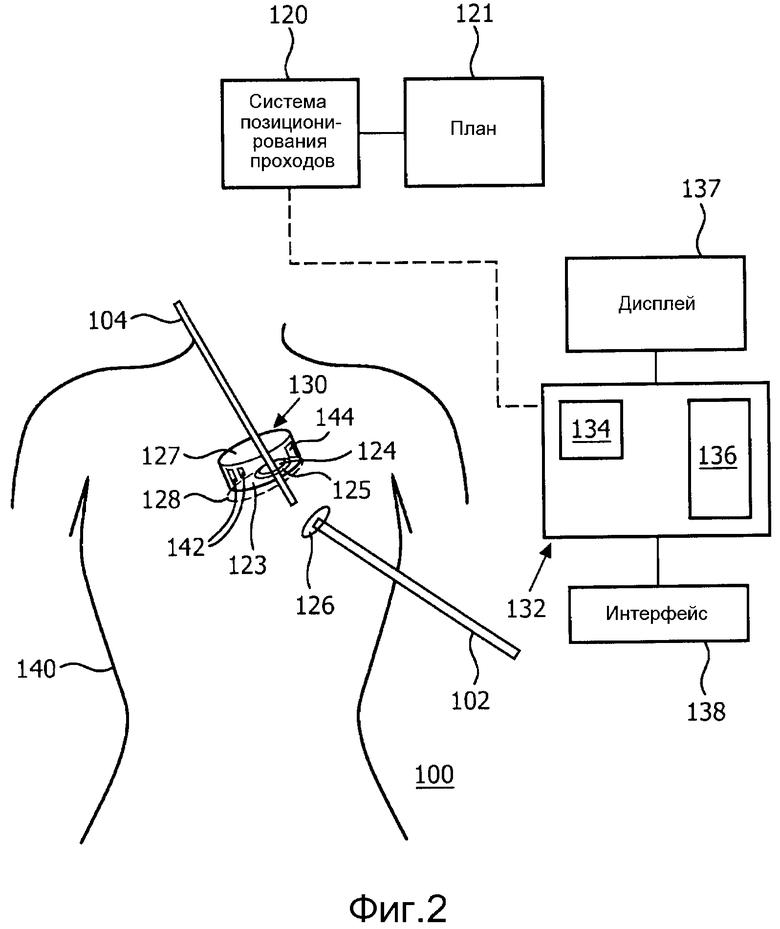
1. Устройство (400, 500) для позиционирования медицинских инструментов для инвазивной хирургии, содержащее:
опору (402);
первый участок (406, 510), выступающий из опоры (402) и имеющий первое отверстие (426) для совмещения с точкой входа в проход;
второй участок (408), выступающий из опоры (402) и выполненный с возможностью позиционирования для совмещения с первым отверстием (426) по множеству различных положений; и
исполнительный механизм (412, 414), соединенный по меньшей мере с одним из первого участка (406, 510) и второго участка (408) для установки относительных положений первого участка (406, 510) и второго участка (408), чтобы позволить совместить ось инструмента, образованную между первым участком (406, 510) и вторым участком (408) через первое отверстие (426) таким образом, чтобы инструмент, предусмотренный на оси инструмента, включал в себя известные положение и ориентацию.
2. Устройство (400, 500) по п. 1, в котором исполнительный механизм (412, 414) включает в себя по меньшей мере одну направляющую для приведения второго участка (408) в действие относительно первого отверстия (426).
3. Устройство (400, 500) по п. 1, в котором исполнительный механизм (412, 414) включает в себя две ортогональные направляющие для регулировки второго участка (408) относительно первого отверстия (426).
4. Устройство (400, 500) по п. 1, дополнительно содержащее:
основание (502); и
второй исполнительный механизм (504, 506), соединяющий основание (502) с опорой (402), при этом второй исполнительный механизм включает в себя по меньшей мере одну направляющую для приведения в движение опоры (402) относительно основания (502).
5. Устройство (400, 500) по п. 4, в котором основание (502) выполнено с возможностью контактирования с положением (128) установки на пациенте таким образом, что первое отверстие (426) соответствует точке входа в проход на пациенте.
6. Устройство (400, 500) по п. 5, дополнительно содержащее инструмент (104), проходящий через первое отверстие (426) и второе отверстие (424) во втором участке (408) и входящий во входной проход в пациенте вдоль оси инструмента таким образом, что инструмент (104) поддерживается в положении, видимом устройством визуализации внутри пациента.
7. Устройство (400, 500) по п. 6, в котором исполнительный механизм (412, 414) управляется компьютером и устанавливается в положение на основании обратной связи по положению или изображению устройства визуализации.
8. Устройство (400, 500) по п. 1, в котором местоположение позиционирующего устройства (130) на пациенте устанавливается системой (120) позиционирования проходов.
9. Устройство (400, 500) для позиционирования медицинских инструментов для инвазивной хирургии, содержащее:
опору (402);
первую пластину (406), выступающую из опоры (402) и имеющую первое отверстие (426) для совмещения с точкой входа в проход;
вторую пластину (408), выступающую из опоры (402) и имеющую второе отверстие (426) для совмещения с первым отверстием; и
исполнительный механизм (412, 414), соединенный по меньшей мере с одной из первой пластины (406) и второй пластины (408) и установленный с обеспечением возможности совмещения оси инструмента через первое отверстие (426) и второе отверстие (428) таким образом, чтобы инструмент, предусмотренный на оси инструмента, проходил через точку входа в проход с известными положением и ориентацией.
10. Способ позиционирования медицинских инструментов для инвазивной хирургии, содержащий этапы, на которых:
размещают (802) устройство визуализации в первом проходе в пациенте;
определяют (804) положение второго прохода для инструмента;
устанавливают (806) пациенту позиционирующее и ориентирующее устройство (400, 500), при этом позиционирующее и ориентирующее устройство включает в себя:
по меньшей мере две пластины (406, 408), выступающие из опоры (402),
причём каждая пластина (406, 408) имеет отверстие (426, 424) и
по меньшей мере одно из упомянутых по меньшей мере двух отверстий (426, 424) имеет регулируемые положения для совмещения оси инструмента по отношению ко второму проходу; и
исполнительный механизм (412, 414) для регулирования положений упомянутого одного из по меньшей мере двух отверстий (426, 424); и
позиционируют (808) инструмент вдоль оси инструмента через упомянутые по меньшей мере два отверстия (426, 424) в соответствии с полем зрения устройства визуализации.
| US 2010042111 A1, 18.02.2010 | |||
| US 2006229641 A1, 12.10.2006 | |||
| US 2009112082 A1, 30.04.2009 | |||
| US 6558318 B1, 06.05.2003 | |||
| US 2002156369 A1, 24.10.2002 | |||
| Выпарной аппарат | 1926 |
|
SU15269A1 |

