ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу составления объема, полученного системой 3-мерной ультразвуковой визуализации. Настоящее изобретение относится также к способу вычисления объема изображения объекта с помощью данной системы. Настоящее изобретение относится также к устройству и компьютерному программному продукту, относящемуся к упомянутым способам.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В области медицины известны многочисленные применения ультразвуковой визуализации. Системы ультразвуковой визуализации применяют в акушерстве для получения изображений плода, чтобы контролировать его развитие. Упомянутые системы применяют также в областях диагностики рака для определения размера опухоли. Исследовать можно несколько частей тела: печень, молочную железу щитовидную железу и т.д. Ультразвуковую визуализацию с диагностической целью используют также для контроля бляшек в сонных артериях или для обнаружения разрывов мышц.
В диагностических областях применения, существует потребность в измерении частей тела. Например, существует потребность в измерении длины кости, объема печени или желчного пузыря, измерении угла между двумя костями и т.п.
Известны системы ультразвуковой визуализации, обеспечивающие измерительные функции. В подобных известных системах, набор данных трехмерного (3-мерного) изображения собирают с учетом объекта, подлежащего визуализации, с помощью ультразвукового датчика. Затем, несколько видов объекта отображают для практикующего врача, который должен поставить диагноз.
В известных системах, практикующий врач должен просматривать виды, предлагаемые системой, для определения главной оси объекта. Практикующий врач проводит вручную главную ось, например, с использованием мыши или пера. Упомянутая главная ось служит для задания набора плоскостей, содержащих срезы объекта и для проведения контуров срезов.
Плоскости задают перпендикулярно главной оси. После того, как плоскости заданы, практикующий врач переходит от одной плоскости к другой для проведения границ среза объекта, изображаемого в текущей плоскости. Затем, система перпендикулярно накладывает друг над другом вдоль главной оси, и в соответствии с предварительно заданным интервалом, контуры, проведенные практикующим врачом в каждой плоскости.
Затем, например, для вычисления объема объекта, вычисляют сумму объемов усеченных конусов, ограниченных двумя последовательными контурами вдоль главной оси.
Способ, применяемый в устройствах известного технического уровня, предъявляет высокие требования к практикующему врачу, который должен вручную проводить контуры в каждом срезе. Для достижения подходящей точности измерения, практикующий врач, обычно, должен провести до 15 контуров. Следовательно, в устройствах известного технического уровня, измерение основано на мастерстве практикующего врача по точному проведению вышеупомянутых контуров в каждой плоскости. Кроме того, процесс прихода к вычислению объема является очень длительным, что не совместимо с применением средств ультразвуковой визуализации в больницах.
Кроме того, измерение основано на определении главной оси, которая определяется вручную. Даже если практикующий врач может выбирать несколько уровней увеличения масштаба изображений, определение главной оси сопряжено с ошибками и, в таком случае, результат может оказаться неточным.
В патенте США 6106466 предлагается способ определения трехмерной поверхности, по меньшей мере, участка сердца пациента на основании данных, полученных методом ультразвуковой визуализации сердца, с ручным вмешательством.
Следовательно, существует потребность в способе измерения, который ограничивает вмешательство пользователя в работу системы ультразвуковой визуализации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения, предлагается способ автоматического составления объема в системе ультразвуковой визуализации, при этом, упомянутый способ содержит этапы, на которых:
a) выполняют сбор набора данных 3-мерного изображения объекта;
b) пользователь выбирает первую представляющую интерес поверхность в данных 3-мерного изображения, причем, упомянутая первая представляющая интерес поверхность содержит первый срез объекта;
c) автоматически определяют, посредством системы, главную ось объекта на первой представляющей интерес поверхности;
d) задают, посредством системы, набор плоскостей из данных 3-мерного изображения, причем, упомянутые плоскости не параллельны главной оси, однако, параллельны друг другу, с заданным расстоянием между двумя последовательными плоскостями вдоль главной оси;
е) для, по меньшей мере, двух плоскостей из первого набора плоскостей, каждая из которых содержит соответствующий второй срез объекта, автоматически проводят, посредством системы, контур второго среза;
f) осуществляют автоматическое составление, посредством системы, объема объекта посредством наложения контуров, проведенных в упомянутых, по меньшей мере, двух плоскостях из набора плоскостей, вдоль главной оси и посредством разнесения упомянутых плоскостей на упомянутое заданное расстояние.
Таким образом, настоящее изобретение обеспечивает способ, который существенно сокращает вмешательство человека, так как контуры и главная ось автоматически определяются системой.
Главная ось может быть определена автоматически посредством применения алгоритма выделения границ на первой представляющей интерес поверхности для распознавания первого среза и посредством выбора отрезка в распознанном срезе в качестве главной оси.
Кроме того, выбранный отрезок может быть наиболее длинным отрезком в распознанном срезе. Следовательно, можно определять большое число контуров, что повышает точность составления.
В соответствии с конкретным вариантом осуществления, способ дополнительно содержит этапы, на которых:
- отображают, по меньшей мере, изображение первой представляющей интерес поверхности;
- получают пользовательские входные данные, указывающие область представляющей интерес поверхности; и
- запускают алгоритм выделения границ в области, указанной пользователем.
Следовательно, процедура составления ускоряется путем указания алгоритму места, где следует начинать распознавание контура. Действительно, практикующий врач обычно имеет большой опыт в области медицинской визуализации и может быстро идентифицировать область, в которой представляется срез объекта.
Этап e) может содержать подэтапы, на которых:
e1) вычисляют центр тяжести контура, проведенного в одной плоскости из набора плоскостей;
e2) выбирают вторую представляющую интерес поверхность в другой плоскости из набора плоскостей, которая является смежной с упомянутой одной плоскостью вдоль главной оси, на основании вычисленного центра тяжести; и
e3) запускают алгоритм выделения границ на упомянутой второй представляющей интерес поверхности, для проведения контура в упомянутой другой плоскости из набора плоскостей.
Таким образом, контуры могут быть выделены в плоскостях без какого-либо вмешательства практикующего врача, который использует систему визуализации. Контур, выделенный в плоскости, служит для определения представляющей интерес поверхности в другой плоскости.
В соответствии с другим вариантом осуществления, способ дополнительно содержит этапы, на которых:
- определяют второй набор плоскостей, содержащий, по меньшей мере, две опорные плоскости в наборе 3-мерных данных, при этом, упомянутые опорные плоскости не параллельны друг другу;
- отображают 2-мерные изображения из набора данных 3-мерного изображения соответственно упомянутым опорным плоскостям;
- выбирают одну опорную плоскость для выбора первой представляющей интерес поверхности на этапе b); и
- выполняют приведение одной плоскости из набора плоскостей в согласованное положение с другой опорной плоскостью.
Опорные плоскости могут быть представлены практикующему врачу, который использует систему визуализации, для большего удобства. Упомянутые опорные плоскости могут помочь практикующему врачу концептуально представить общую форму визуализируемого объекта.
Определять можно три опорные плоскости, при этом, каждая плоскость перпендикулярна другим плоскостям, и вторая представляющая интерес поверхность в, по меньшей мере, одной плоскости из набора плоскостей может быть задана точкой пересечения трех опорных плоскостей. Следовательно, практикующему врачу не требуется указывать, где следует производить поиск контура, и запуск процедуры выделения контура облегчается указанием представляющей интерес поверхности в первой рассматриваемой плоскости.
В соответствии со вторым аспектом изобретения, предлагается способ вычисления объема.
В соответствии с третьим аспектом изобретения, предлагается компьютерный программный продукт, содержащий команды для выполнения способа составления в соответствии с, по меньшей мере, одним из вышеописанных вариантов осуществления изобретения, при загрузке и исполнении в компьютерном средстве устройства ультразвуковой визуализации. Предлагается также компьютерный программный продукт, содержащий команды для выполнения способа вычисления объема.
В соответствии с другими аспектами изобретения, предлагаются устройства для составления и вычисления объема, содержащие средство для выполнения способа в соответствии с, по меньшей мере, одним из вышеописанных аспектов изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества изобретения станут очевидными из неограничивающих примерных вариантов осуществления, описанных ниже со ссылкой на прилагаемые чертежи, на которых:
- Фиг.1 - схематическое изображение объекта и среза данного объекта, представленного по заданной плоскости;
- Фиг.2 - схематическое изображение объекта, визуализируемого по трем опорным плоскостям;
- Фиг.3 - схематическое изображение объекта, показанного на фиг.2, визуализируемого по опорным плоскостям, выровненным по главной оси объекта;
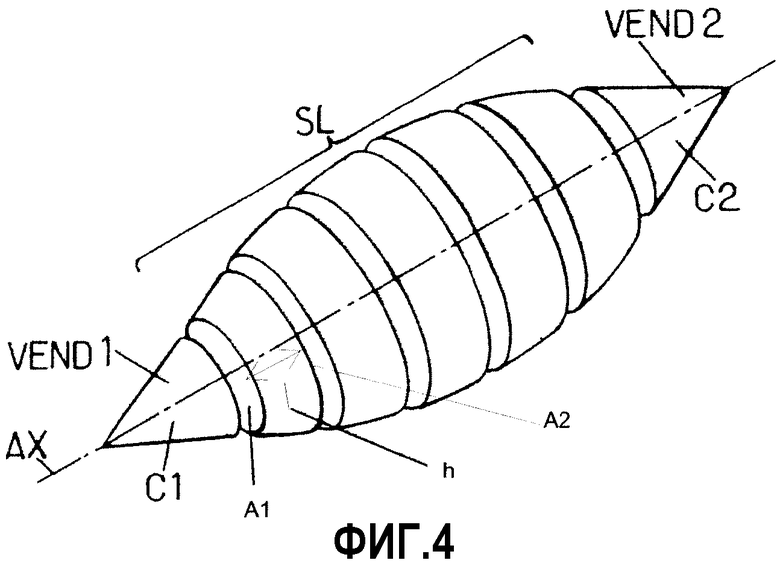
- Фиг.4 - схематическое изображение составленного объема;
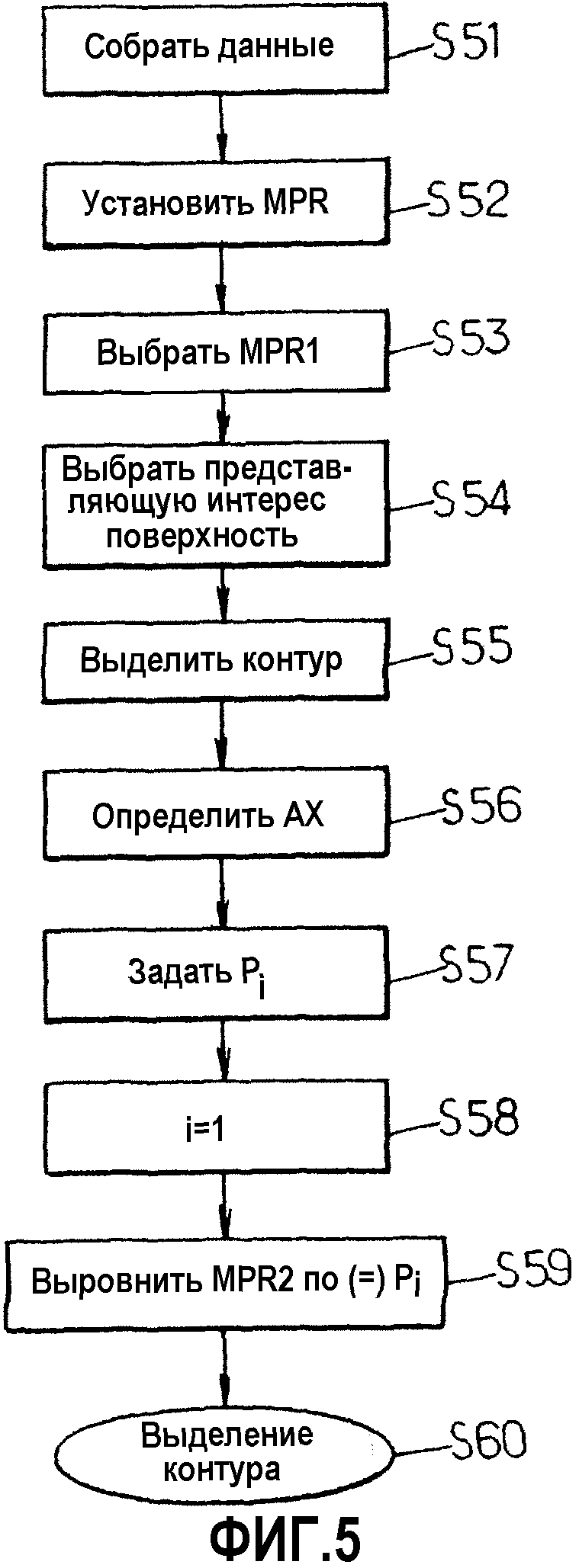
- Фиг.5 - блок-схема последовательности этапов способа, от сбора данных до выравнивания плоскостей;
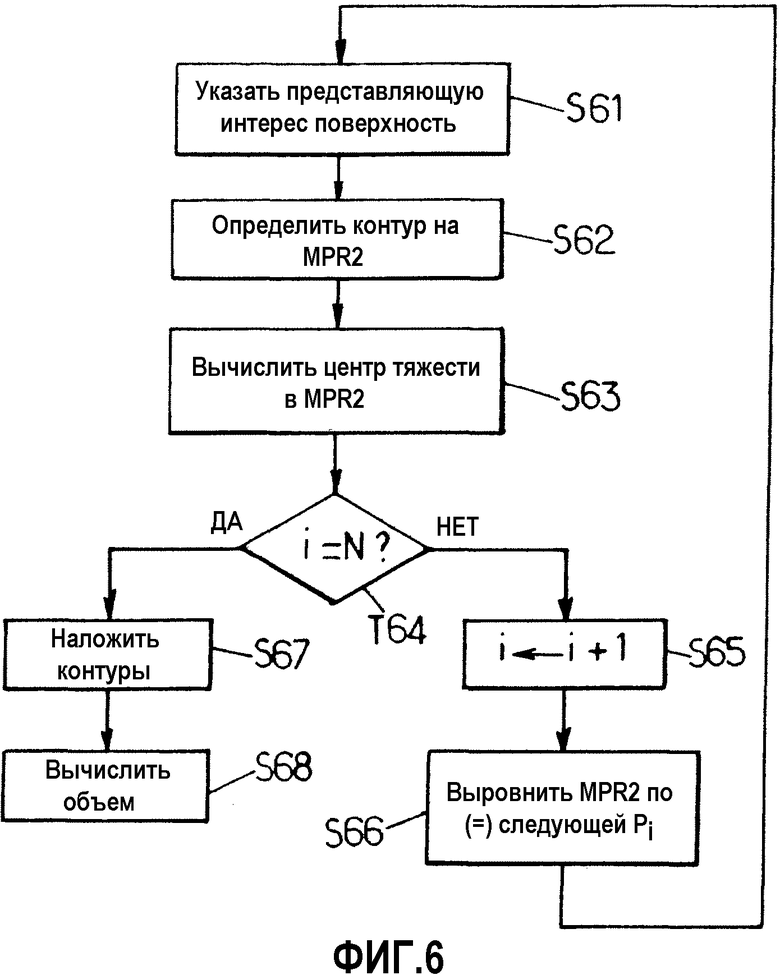
- Фиг.6 - блок-схема последовательности этапов выделения контура; и
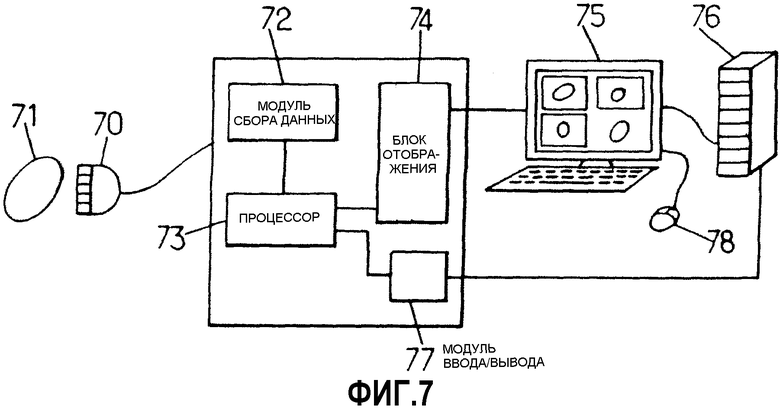
- Фиг.7 - схематическое изображение устройства ультразвуковой визуализации для выполнения способа составления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
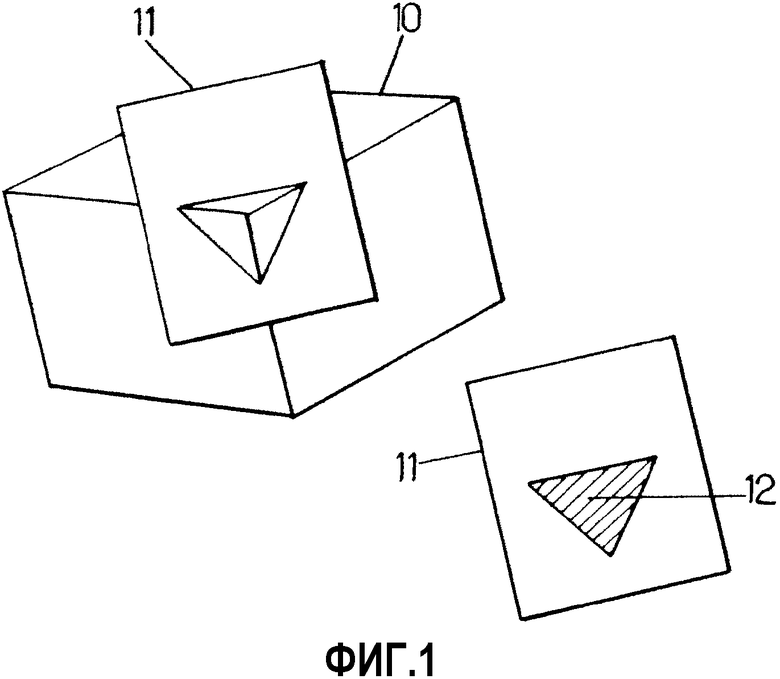
Когда в настоящем описании упоминается срез объекта, это означает вид пересечения объекта заданной плоскостью. Как видно из фиг.1, трехмерный (3-мерный) объект 10 и плоскость 11 пересекаются в области 12, видимой на плоскости 11, называемой в дальнейшем срезом объекта.
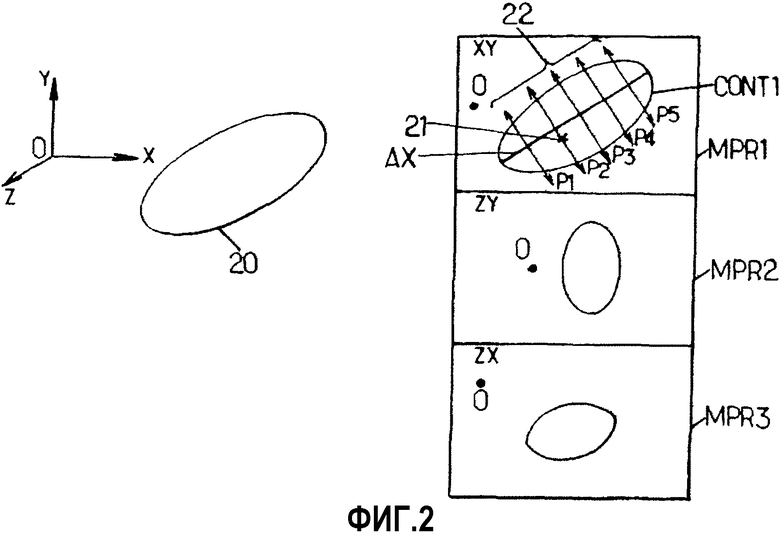
Как показано на фиг.2, объект визуализировали по трем опорным плоскостям. Упомянутые плоскости описаны относительно ортонормальной системы координат (O, x, y, z). Следовательно, опорные плоскости (O, x, y), (O, z, y), (O, z, x) характеризуются заданным ортогональным положением одна относительно другой.
На фиг.2 показан вид объекта 20 соответственно каждой опорной плоскости, отображаемый для пользователя. Упомянутые виды называют MPR, сокращение от «многоплоскостной реконструкции». Каждая MPR (MPR1, MPR2, MPR3) представляет срез объекта 20.
Пользователь производит выбор между упомянутыми MPR для выбора представляющей интерес поверхности в выбранной MPR. Конкретный выбор может представлять собой MPR, которая обладает наилучшим разрешением. Действительно, так как на выбранной MPR будет исполняться алгоритм выделения границ для определения главной оси, то плоскость с высоким разрешением может быть предпочтительной.
Одна конкретная MPR может соответствовать плоскости сбора данных. Упомянутая плоскость сбора данных соответствует плоскости, ортогональной пучкам ультразвуковой системы. Плоскость такого типа обычно обладает высоким разрешением.
На фиг.2, пользователь выбирает MPR1 для запуска алгоритма выделения границ. С данной целью, пользователь щелкает мышью на MPR на срезе в местоположении 21, соответствующем внутренней стороне от границы. Щелчок мышью вызывает запуск алгоритма, и выделяется контур CONT1 среза. Например, алгоритм выделения границ представляет собой алгоритм распознавания образов, например, так называемый, быстрый марш-алгоритм или, например, так называемый, алгоритм змейки.
Затем, компьютерная программа запускает другой алгоритм для определения главной оси AX. Самый длинный отрезок, содержащийся в срезе, выбирается как главная ось. Как обычно, визуализируемые объекты имеют эллипсоидальную форму, при этом, главная ось может соответствовать главной оси эллипсоида.
После того, как определена главная ось AX, ее делят на равные части для радиально-симметричного составления. Однако, части могут иметь разные размеры.
При каждом разделении главной оси, определяется плоскость P1, P2, P3, P4, P5, ортогональная главной оси. Упомянутые плоскости задают набор 22 плоскостей, параллельных друг другу, однако, не параллельных главной оси с заданным расстоянием между двумя последовательными плоскостями вдоль главной оси.
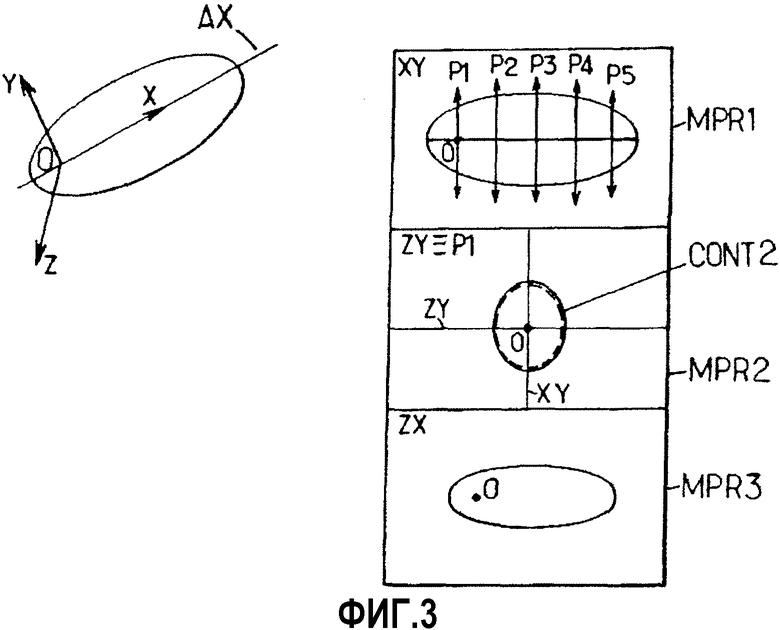
Как видно из фиг.3, визуализируется тот же объект, который показан на фиг.2, и также по MPR, но в данном случае, MPR выравнивают так, что плоскость (O, x, y) совпадает с плоскостью P1.
После того, как MPR выровнены, компьютерная программа запускает алгоритм выделения границ на MPR2, на представляющей интерес поверхности, обнаруженной в качестве пересечения MPR1 и MPR3 в MPR2, то есть, в точке O. Таким образом, вмешательства пользователя ультразвуковой системы визуализации не требуется.
Алгоритм выделения границ определяет контур CONT2 среза MPR2.
Посредством последовательного выравнивания MPR с каждой плоскостью P1, P2, P3, P4, P5 и посредством определения контуров в каждой в каждой из упомянутых плоскостей, осуществляют составление объекта, как показано на фиг.4.
Составление объекта содержит набор срезов SL, ограниченных контурами, выделенными в каждой плоскости P1, P2, P3, P4, P5, и расстояние между двумя последовательными плоскостями.
Если объект имеет заостренную оконечность, то главная ось проходит через упомянутую заостренную оконечность, и способ дополнительно содержит этап определения оконечного конуса, соответствующего заостренной оконечности объекта. Такое определение дает возможность точного составления объекта.
Составление, показанное на фиг.4, содержит два оконечных конуса C1, и C2. Упомянутые конусы определяют, чтобы осуществить более точное составление объекта. Действительно, в конкретном случае, показанном на фиг.4, объект имеет заостренную форму.
Затем, чтобы определить объем VOL объекта, вычисляют сумму объемов усеченных конусов, ограниченных двумя последовательными контурами вдоль главной оси. Объемы таких усеченных конусов можно вычислить по формуле:  , где A1 и A2, соответственно, означают площади двух последовательных контуров вдоль главной оси, и h соответствует расстоянию между двумя последовательными контурами. Объемы упомянутых усеченных конусов аппроксимируют частичные объемы срезов. В действительности, выделенные контуры могут быть некруглой формы, а любой другой формы.
, где A1 и A2, соответственно, означают площади двух последовательных контуров вдоль главной оси, и h соответствует расстоянию между двумя последовательными контурами. Объемы упомянутых усеченных конусов аппроксимируют частичные объемы срезов. В действительности, выделенные контуры могут быть некруглой формы, а любой другой формы.
Затем, объем VOL вычисляют суммированием всех объемов усеченных конусов, которые аппроксимируют частичные объемы срезов, с частичными объемами оконечных конусов.
Объем можно также вычислять по способу Симпсона, с использованием измерений объемов сердца.
На фиг.5 и 6 показаны блок-схемы последовательностей этапов, выполняемых в рамках вышеописанного способа.
Сначала, на этапе S51 выполняется сбор данных 3-мерного изображения объекта посредством ультразвукового датчика. Затем, на этапе S52 задают три опорные плоскости из 3-мерных данных. Каждая опорная плоскость перпендикулярна другим опорным плоскостям. На этапе S53 выбирают одну из упомянутых опорных плоскостей, для определения главной оси в 3-мерных данных. Изображения по трем плоскостям можно отображать одновременно.
На этапе S54, пользователь системы ультразвуковой визуализации щелкает мышью на представляющей интерес поверхности в отображенном изображении опорной плоскости, которая выбрана. Для этого, пользователь снабжен мышью или пером. Затем, на этапе S55 запускается алгоритм выделения границ на выбранной представляющей интерес поверхности, чтобы выделить и провести контур объекта в опорной плоскости. После проведения контура с помощью алгоритма выделения, главная ось определяется на этапе S56 выбором самого длинного отрезка в контуре.
По главной оси автоматически задается набор плоскостей Pi, где i означает целое число от 1 до 5. Каждая плоскость из набора плоскостей параллельна другим плоскостям, однако, не параллельна главной оси. В предпочтительном варианте, упомянутые плоскости нормальны главной оси.
Затем, процедура выделения контуров автоматически запускается на этапе S58 посредством установки i равным 1, то есть, выбором плоскости P1.
Сначала, опорные плоскости выравнивают так, что одна плоскость P1, P2, P3, P4, P5 из набора плоскостей Pi совпадает с опорной плоскостью, отличной от опорной плоскости, по которой определена главная ось. Процедура S60 выделения контуров подробно поясняется со ссылкой на фиг.6.
Для запуска выделения первого контура, определяют пересечение опорных плоскостей. Упомянутое пересечение служит «затравкой» (т.е. начальной точкой) для определения представляющей интерес поверхности в первой плоскости P1, рассматриваемой в наборе плоскостей Pi. Затем, на этапе S62, запускается алгоритм выделения границ на представляющей интерес поверхности.
Плоскости из набора плоскостей последовательно обрабатываются в зависимости от их положения вдоль главной оси. Например, плоскости обрабатываются для i от 1 по 5, так как, вдоль главной оси, плоскость Pi+1 расположена за плоскостью Pi.
Алгоритм проводит контур среза объекта в текущей плоскости. Затем, на этапе S63, вычисляется центр тяжести контура.
Упомянутый центр тяжести служит «затравкой» для автоматического выбора системой, на этапе S61, представляющей интерес поверхности для алгоритма выделения границ в следующей плоскости в наборе плоскостей вдоль главной оси.
Упомянутый выбор обеспечивается геометрическим проецированием центра тяжести предыдущей обработанной плоскости на текущую плоскость, вдоль главной оси. Упомянутый выбор можно также обеспечить применением обычной системы координат и запуском алгоритма в точке, которая имеет в текущей плоскости такие же координаты, как центр тяжести в предыдущей плоскости.
Действительно, так как плоскости из набора плоскостей параллельны друг другу, «затравку» для алгоритма выделения границ можно легко получать посредством геометрической проекции центра тяжести в соседней плоскости вдоль главной оси.
На этапе T64 выполняется определение, остаются ли другие плоскости для выделения контуров. Если упомянутые плоскости остаются, то положение плоскости наращивается на этапе S65, и опорную плоскость выравнивают по следующей плоскости на этапе S66. Затем, процедура возвращается на этап S61.
Если в наборе плоскостей больше не остается плоскости для выделения контура, то все контуры, выделенные на этапе S62, накладывают вдоль и перпендикулярно главной оси на этапе S67. И, затем, объем объекта вычисляется на этапе S68.
Описание устройства для выполнения вышеописанного способа приведено на примере фиг.7. Устройство содержит ультразвуковой датчик 70 для испускания ультразвуковых волн к объекту 71 и приема отражений упомянутых волн от объекта. Сигналы, доставляемые датчиком, обрабатываются модулем 72 сбора данных для преобразования сигналов в данные 3-мерного изображения. Устройство содержит процессор 73 для обработки данных изображения в соответствии с вышеописанным способом составления или вычисления объема. Устройство содержит также блок отображения для подачи на монитор 75 изображений соответственно опорной плоскости. Устройство содержит также модуль 77 связи для обмена информацией с компьютером 76. Устройство дополнительно содержит мышь 78 для манипуляций типа щелчков на отображаемых изображениях и, тем самым, выбора представляющих интерес поверхностей.
Изобретение относится также к компьютерному программному продукту, который может выполнять любые этапы способа вышеописанным образом, при загрузке и исполнении в компьютерном средстве устройства ультразвуковой визуализации. Компьютерная программа может храниться/поставляться на подходящем носителе, поставляемом вместе с другой аппаратурой или в ее составе, но может также поставляться в других формах, например, по сети Internet или посредством других проводных или беспроводных телекоммуникационных систем.
Изобретение относится также к интегральной схеме, которая выполнена с возможностью выполнения любых этапов способа в соответствии с вариантами осуществления изобретения.
Хотя на чертежах и в вышеприведенном описании изобретение приведены подробные иллюстрации и изложение настоящего изобретения, упомянутые иллюстрации и описание следует считать наглядными и примерными, а не ограничивающими, и изобретение не ограничено предложенным вариантом осуществления. В процессе применения заявленного изобретения, специалистами в данной области техники, в результате изучения чертежей, описания и прилагаемой формулы изобретения, могут быть созданы и реализованы другие изменения описанного варианта осуществления.
В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и единственное число не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, упомянутых в формуле изобретения. Очевидное обстоятельство, что разные признаки упомянуты во взаимно независимых пунктах формулы изобретения, не означает, что, в подходящих случаях, нельзя использовать сочетание упомянутых признаков. Никакие позиции в формуле изобретения нельзя интерпретировать как ограничивающие объем изобретения.
Изобретение относится к средствам измерения объема тела в процессе ультразвуковой визуализации. Способ автоматического составления объема в системе ультразвуковой визуализации содержит этапы, на которых выполняют сбор набора данных 3-мерного изображения объекта, пользователь выбирает первую представляющую интерес поверхность в данных 3-мерного изображения, причем упомянутая первая поверхность содержит первый срез объекта, автоматически определяют главную ось первого среза объекта на первой представляющей интерес поверхности, задают первый набор плоскостей из данных 3-мерного изображения, причем упомянутые плоскости не параллельны главной оси первого среза, однако, параллельны друг другу, с заданным расстоянием между двумя последовательными плоскостями вдоль главной оси, для, по меньшей мере, двух плоскостей из первого набора плоскостей, каждая из которых содержит соответствующий второй срез объекта, автоматически проводят контур каждого второго среза, осуществляют автоматическое составление объема объекта посредством наложения контуров, проведенных в двух плоскостях из первого набора плоскостей, вдоль главной оси и посредством разнесения плоскостей на заданное расстояние. Способ вычисления объема в ультразвуковой системе включает составление объема объекта, при этом каждая плоскость из набора плоскостей перпендикулярна главной оси первого среза, после чего вычисляют частичные объемы, содержащиеся между двумя последовательными плоскостями в наборе плоскостей по главной оси первого среза, и суммируют их. Устройство для осуществления способов содержит средство сбора набора данных 3-мерного изображения с помощью ультразвука, средство отображения, по меньшей мере, изображения первого среза объекта, средство выбора пользователем первой представляющей интерес поверхности в данных 3-мерного изображения, средство для определения главной оси первого среза объекта на представляющей интерес поверхности, средство задания первого набора плоскостей из данных 3-мерного изображения, средство проведения в, по меньшей мере, двух плоскостях из первого набора плоскостей, каждая из которых содержит соответствующий второй срез объекта, контура каждого второго среза, и средство составления объема объекта. В состав устройства входят также машиночитаемые носители, компьютерные программы которых содержат команды для выполнения способов. Использование изобретения позволяет повысить точность определения объема и сократить вмешательство человека в процесс измерения. 5 н. и 10 з.п. ф-лы, 7 ил.
1. Способ автоматического составления объема в системе ультразвуковой визуализации, при этом упомянутый способ содержит этапы, на которых:
a) выполняют сбор (S51) набора данных 3-мерного изображения объекта;
b) пользователь выбирает (S54) первую представляющую интерес поверхность в данных 3-мерного изображения, причем упомянутая первая представляющая интерес поверхность содержит первый срез объекта;
c) автоматически определяют (S56) главную ось (АХ) первого среза объекта на первой представляющей интерес поверхности;
d) задают (S57) первый набор плоскостей (22) из данных 3-мерного изображения, причем упомянутые плоскости не параллельны главной оси первого среза, однако, параллельны друг другу, с заданным расстоянием между двумя последовательными плоскостями вдоль главной оси;
e) для, по меньшей мере, двух плоскостей из первого набора плоскостей, каждая из которых содержит соответствующий второй срез объекта, автоматически проводят (S62) контур каждого второго среза; и
f) осуществляют автоматическое составление (S67) объема объекта посредством наложения контуров, проведенных в упомянутых, по меньшей мере, двух плоскостях из первого набора плоскостей, вдоль главной оси и посредством разнесения упомянутых плоскостей на упомянутое заданное расстояние.
2. Способ по п.1, в котором этап с) содержит подэтапы, на которых:
с1) применяют алгоритм выделения границ на первой представляющей интерес поверхности для распознавания первого среза (CONT1); и
с2) выбирают отрезок в распознанном срезе в качестве главной оси.
3. Способ по п.2, в котором выбранный отрезок является самым длинным отрезком в распознанном срезе.
4. Способ по любому из пп.2-3, дополнительно содержащий этапы, на которых:
отображают, по меньшей мере, изображение первой представляющей интерес поверхности;
получают пользовательские входные данные, указывающие область представляющей интерес поверхности; и
запускают алгоритм выделения границ в области, указанной пользователем.
5. Способ по любому из предшествующих пунктов, в котором этап е) содержит подэтапы, на которых:
е1) вычисляют центр тяжести контура, проведенного в одной плоскости из первого набора плоскостей;
е2) выбирают вторую представляющую интерес поверхность в другой плоскости из первого набора плоскостей, которая является смежной с упомянутой одной плоскостью вдоль главной оси, на основании вычисленного центра тяжести; и
е3) запускают алгоритм выделения границ на упомянутой второй представляющей интерес поверхности, для проведения контура в упомянутой другой плоскости из первого набора плоскостей.
6. Способ по любому из предшествующих пунктов, дополнительно содержащий этапы, на которых:
определяют (S52) второй набор плоскостей, содержащий, по меньшей мере, две опорные плоскости (MPR1, MPR2) в наборе 3-мерных данных, при этом упомянутые опорные плоскости не параллельны друг другу;
отображают 2-мерные изображения из набора данных 3-мерного изображения соответственно упомянутым опорным плоскостям;
выбирают одну опорную плоскость для выбора первой представляющей интерес поверхности на этапе b); и
выполняют приведение (S66) одной плоскости из набора плоскостей в согласованное положение с другой опорной плоскостью.
7. Способ по п.6, в котором определяют три опорные плоскости, при этом каждая плоскость перпендикулярна другим плоскостям, и причем представляющая интерес поверхность для проведения контура на этапе е) в, по меньшей мере, одной плоскости из набора плоскостей задается точкой пересечения трех опорных плоскостей.
8. Способ вычисления объема в ультразвуковой системе, содержащий этапы, на которых:
осуществляют составление объема объекта посредством способа по любому из пп.1-7, при этом каждая плоскость из набора плоскостей перпендикулярна главной оси первого среза;
вычисляют частичные объемы, содержащиеся между двумя последовательными плоскостями в наборе плоскостей по главной оси первого среза; и
суммируют (S68) упомянутые частичные объемы.
9. Машиночитаемый носитель, имеющий сохраненную на нем компьютерную программу, содержащую команды для выполнения этапов способа по любому из пп.1-7, при загрузке и исполнении в компьютерном средстве устройства ультразвуковой визуализации.
10. Машиночитаемый носитель, имеющий сохраненную на нем компьютерную программу, содержащую команды для выполнения этапов способа по п.8, при загрузке и исполнении в компьютерном средстве устройства ультразвуковой визуализации.
11. Устройство для автоматического составления объема объекта, при этом упомянутое устройство содержит:
средство (70, 72) для сбора набора данных 3-мерного изображения с помощью ультразвука;
средство (75, 74) для отображения, по меньшей мере, изображения первого среза объекта;
средство (73) для выбора пользователем первой представляющей интерес поверхности в данных 3-мерного изображения, причем упомянутая первая представляющая интерес поверхность содержит первый срез объекта;
средство (73) для определения главной оси (АХ) первого среза объекта на представляющей интерес поверхности;
средство (73) для задания первого набора плоскостей (22) из данных 3-мерного изображения, причем упомянутые плоскости не параллельны главной оси первого среза, однако, параллельны друг другу, с заданным расстоянием между двумя последовательными плоскостями вдоль главной оси;
средство (73) для проведения в, по меньшей мере, двух плоскостях из первого набора плоскостей, каждая из которых содержит соответствующий второй срез объекта, контура каждого второго среза; и
средство (73) для составления объема объекта посредством наложения контуров, проведенных в упомянутых, по меньшей мере, двух плоскостях из первого набора плоскостей, вдоль главной оси и посредством разнесения плоскостей на упомянутое расстояние.
12. Устройство по п.11, дополнительно содержащее средство для автоматического определения главной оси (АХ) посредством применения алгоритма выделения границ на первой представляющей интерес поверхности для распознавания первого среза (CONT1) и средство для выбора отрезка в распознанном срезе в качестве главной оси.
13. Устройство по п.11 или 12, дополнительно содержащее:
средство (75) для отображения, по меньшей мере, изображения, содержащего первую представляющую интерес поверхность;
средство (78) для получения пользовательских входных данных, указывающих область первой представляющей интерес поверхности; и
средство для запуска алгоритма выделения границ в области, указанной пользователем.
14. Устройство по любому из пп.11-13, дополнительно содержащее:
средство для вычисления центра тяжести контура, проведенного в одной плоскости из первого набора плоскостей;
средство для выбора второй представляющей интерес поверхности в другой плоскости из первого набора плоскостей, которая является смежной с упомянутой одной плоскостью вдоль главной оси, на основании вычисленного центра тяжести; и
средство для запуска алгоритма выделения границ на упомянутой второй представляющей интерес поверхности, для проведения контура в упомянутой другой плоскости из первого набора плоскостей.
15. Устройство по любому из пп.11-14, дополнительно содержащее:
средство для определения второго набора плоскостей, содержащего, по меньшей мере, две опорные плоскости (MPR1, MPR2) в наборе 3-мерных данных, при этом упомянутые плоскости не параллельны друг другу;
средство для отображения 2-мерных изображений из набора данных 3-мерного изображения соответственно упомянутым опорным плоскостям;
средство для выбора одной опорной плоскости для выбора первой представляющей интерес поверхности; и
средство для приведения одной плоскости из набора плоскостей в согласованное положение с другой опорной плоскостью.
| US 6482161 B1, 19.11.2002 | |||
| US 2006291705 A1, 28.12.2006 | |||
| US 6945938 В2, 20.09.2005 | |||
| US 7043062 В2, 09.05.2006 | |||
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |
| Лапчатый зажим для прикрепления глухого фланца к фланцам паровозных, паропроводных труб и арматурных частей при гидравлическом их испытании | 1926 |
|
SU9382A1 |

