Данное изобретение относится к медицинским системам ультразвуковой диагностики, в частности к ультразвуковым системам, которые могут выполнять диагностику сердца плода посредством визуализации в режиме реального времени плоскостей изображения, полезных с точки зрения диагностики.
Ультразвуковая визуализация обычно используется во время беременности для того, чтобы оценить развитие плода в утробе матери. Ультразвуковой скрининг сердца плода предназначен для обнаружения структурных аномалий (как правило, врожденных пороков сердца или ИБС) и включает в себя анализ стандартных двумерных (2D) срезов изображения сердца плода. Типичные стандартные срезы включают в себя четырехкамерный срез и срезы, которые позволяют оценить выводные тракты левого желудочка (ЛЖ) и правого желудочка (ПЖ). Другие срезы, которые могут потребоваться, включают в себя пятикамерный срез, срез через три главных сосуда и срез через трахею. На практике эти срезы, как правило, выявляют большинство форм ИБС. Традиционный путь врача для того, чтобы получить изображения каждого требуемого среза, состоит в манипулировании ультразвуковым зондом, находящимся в акустическом контакте с животом, до тех пор, пока требуемая анатомическая ориентация не окажется в плоскости изображения зонда для 2D визуализации. Например, врач сначала манипулирует зондом до тех пор, пока сердца плода не будет видно на четырехкамерном срезе. Врач затем сохраняет изображение этого среза или последовательность изображений для одного или нескольких ударов сердца. Сохранение изображений заканчивается, и врач манипулирует зондом снова, на этот раз пытаясь выровнять плоскость изображения со срезом выводного тракта ЛЖ. Когда врач успешно выровнял плоскость изображения с этим срезом, сохраняются еще одно изображение или последовательность изображений. Процесс манипулирования зондом и сохранение повторяется для среза через три главных сосуда и других срезов по мере необходимости. При этой процедуре может быть пропущено значительное число случаев патологических изменений, потому что получение и анализ этих срезов требует высокой квалификации: эхокардиография плода очень зависит от оператора. Кроме того, плод может двигаться во время процедуры, что требует от врача переориентироваться относительно сердца плода каждый раз, когда плод движется.
Теперь, с внедрением получения трехмерного (3D) ультразвукового изображения (а именно, протокола пространственно-временной корреляции изображений или STIC), стало возможно захватить весь объем сердца плода и прилегающие к нему сосуды и выполнить компьютерную реконструкцию из 2D срезов любой ориентации в сердце, в том числе стандартных, даже после того, как пациент будет отпущен. Процедура STIC проводится путем выполнения медленного непрестанного перемещения плоскости 2D изображения по сердцу плода, которая может занять 10 секунд или более. Цель состоит в получении изображения каждой прилегающей анатомической плоскости сердца плода в каждой фазе сердечного цикла плода. Это делается путем сбора большого количества изображений по большому количеству сердечных циклов по мере того, как плоскость изображения перемещается по сердцу. Затем используется управляемая пользователем обработка изображения для извлечения преобладающего временного цикла всего сердца плода из собранных 2D кадров. Эта информация затем используется для повторной сборки кадров в серии объемных изображений, каждая в другой фазе сердечного цикла. Стандартные 2D срезы затем извлекаются пользователем из этих объемов с помощью процесса, известного как многопланарная реконструкция (MPR). Врач должен выполнять поиск в объемах при разных ориентациях плоскости, ища каждый стандартный срез. Некоторые срезы могут быть искажены или анатомически неправильны, что зависит от скорости и равномерности перемещения плоскости изображения. Качество и корректность STIC-объемов может значительно варьироваться от одного исследования к другому. Кроме того, STIC изображения не являются изображениями в реальном времени, а синтезированными ретроспективными реконструкциями анатомических срезов, сконструированных из нескольких различных сердечных циклов. Несмотря на трудности и ограничения процедуры STIC, сейчас является сложившейся практикой то, что исследования 3D сердца плода могут потенциально уменьшить процент ошибочных диагнозов и совершенствовать рабочий процесс и зависимость от оператора (более низкой квалификации), что обусловлено тем, что 3D рабочий процесс является интуитивно понятным и для изучения данных объемных изображений предоставляются адекватные средства (например, MPR).
Можно предполагать, что ультразвуковая 3D визуализация в реальном времени может использоваться для получения прямой передачи объемных изображений сердца плода. К сожалению, в большинстве случаев нынешние частоты объемных кадров недостаточно высоки для того, чтобы обеспечить как достаточное пространственное разрешение, так и разрешение по времени (объемную частоту) для того, чтобы сделать осуществимой на практике прямую передачу 3D визуализации для визуализации сердца плода. Кроме того, так как требуются только определенные плоскости 2D изображения для диагностики сердца плода, большая часть 3D информации не используется. Если бы можно было получить только необходимые плоскости, в принципе, их можно было бы получать при значительно более высоких частотах кадров с гораздо более высоким разрешением. Таким образом, существует необходимость в том, чтобы иметь возможность получать, с хорошим пространственным и временным разрешением, ультразвуковые данные, которые предоставляют при этом необходимые 2D стандартные срезы в режиме реального времени.
В статье «Automatic Alignment of Standard Views in 3D Echocardiograms Using Real-Time racking», Oderus, H. Torp, S.I. Rabbe, Proceedings of PIE, vol. 7265, 26 февраля 2009, страницы 7265QD-1-72650D-7, XPQ4Q495310, раскрывается автоматизированный подход для выравнивания стандартных апикальных срезов и срезов по короткой оси и их коррекции для внеплоскостного движения в 3D эхокардиографии. Способ дает возможность работать в режиме реального времени, потенциально во время получения изображения.
В соответствии с принципами настоящего изобретения описываются система ультразвуковой диагностики и способ, который делает возможным получение нескольких стандартных срезов целевой анатомии, такой как сердце плода, в режиме реального времени. Матричный зонд находится в контакте с подходящим акустическим окном на теле матери для того, чтобы видеть сердца плода. Матричный зонд может сканировать выбираемые по-разному ориентированные плоскости изображения в быстрой последовательности, что делает возможной визуализацию выбранных плоскостей изображения в режиме реального времени. Сначала зондом манипулируют, визуализируя при этом одну плоскость в режиме реального времени до тех пор, пока не будет получена первая опорная плоскость, такая как четырехкамерный срез. Затем используется модель целевой анатомии, такая как модель сердца, с тем, чтобы сопоставить ультразвуковое изображение четырехкамерного среза с соответствующим четырехкамерным срезом в модели сердца. Из относительной ориентации требуемых плоскостей в модели, модель сердца предоставляет информацию об относительных ориентациях других стандартных срезов относительно полученной опорной плоскости. Эта информация используется для управления матричным зондом для того, чтобы дополнительно сканировать плоскости изображения одного или более других срезов в режиме реального времени. Затем пользователь может отобразить опорный стандартный срез и одновременно один или более других требуемых срезов в режиме реального времени.
НА ЧЕРТЕЖАХ:
На Фиг. 1 в виде блок-схемы показана ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения.
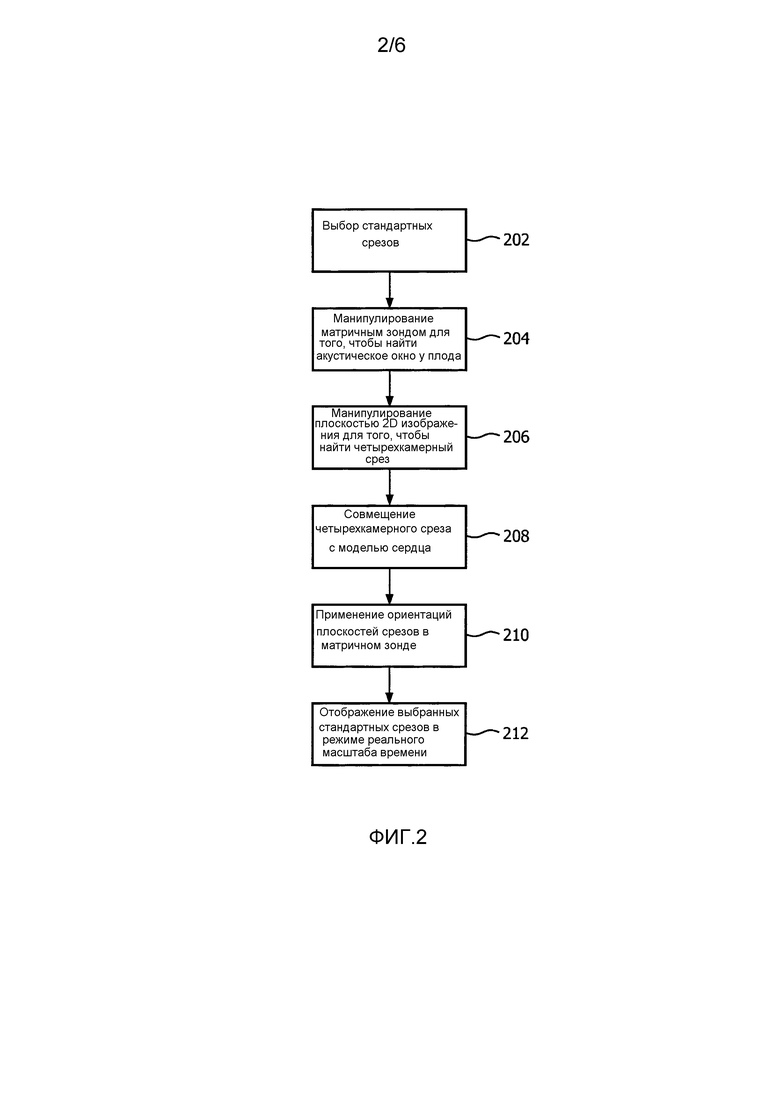
На Фиг. 2 показан один способ получения изображения плода и отображения в соответствии с настоящим изобретением.
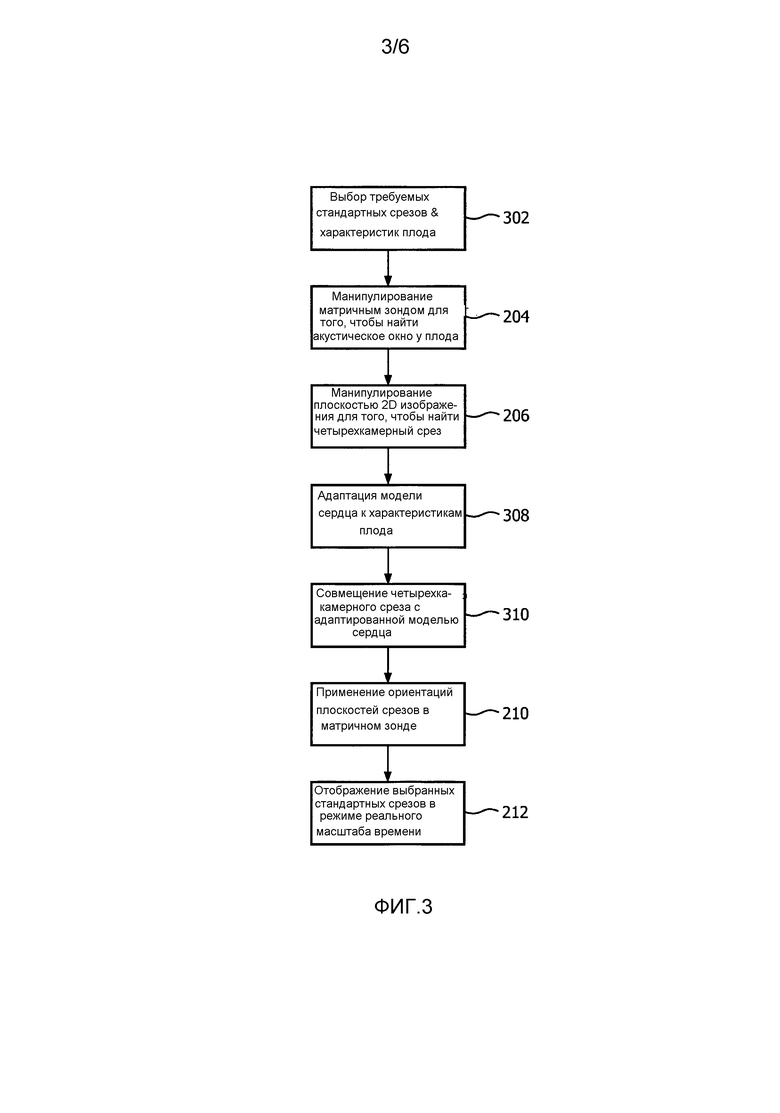
На Фиг. 3 показан второй способ получения изображения плода и отображения в соответствии с настоящим изобретением.
На Фиг. 4 показан третий способ получения изображения плода и отображения в соответствии с настоящим изобретением.
На Фиг. 5 показаны три стандартных среза сердца плода совместно с их соответствующими плоскостями модели сердца плода.
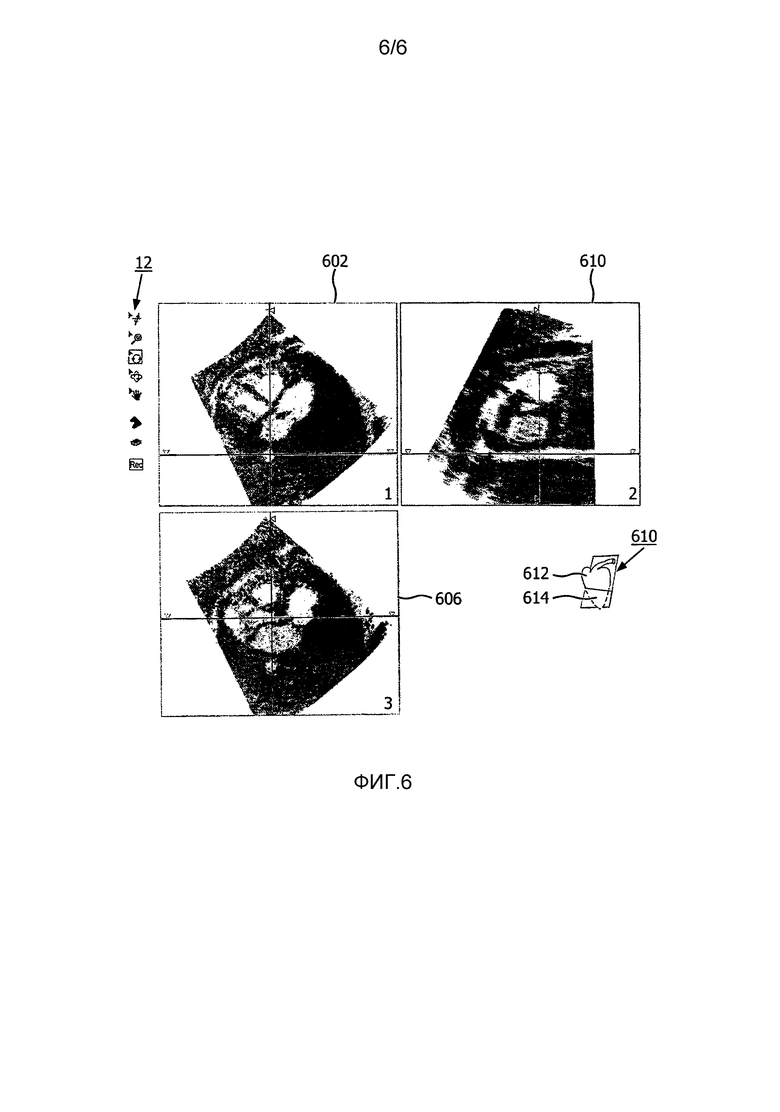
На Фиг. 6 показан дисплей ультразвуковой системы с тремя срезами стандартных плоскостей изображения сердца плода в режиме реального времени, полученных в соответствии с принципами настоящего изобретения.
Обратимся сначала к Фиг. 1, ультразвуковая система 10, сконструированная в соответствии с принципами настоящего изобретения, представлена в виде блок-схемы. Ультразвуковая система скомпонована из двух подсистем - подсистемы 10A сбора с предварительной обработкой и подсистемы 10B отображения. Ультразвуковой зонд соединен с подсистемой сбора, которая включает в себя двумерный матричный преобразователь 70 и микроформирователь 72 луча. Микроформирователь луча содержит схемы, которые управляют сигналами, применяемыми к группе элементов («излучатели») матричного преобразователя 70 и делает начальную обработку эхосигналов, принятых элементами каждой группы. Микроформирователь луча в зонде предпочтительно уменьшает количество проводов в кабеле между зондом и ультразвуковой системой и описывается в патенте США 5997479 (автор Savord и др.) и в патенте США 6436048 (автор Pesque).
Зонд связан с подсистемой 10A сбора ультразвуковой системы. Подсистема сбора включает в себя контроллер 74 формы луча, который способен реагировать на стробирующий сигнал, как описано ниже, и подает сигналы управления на микроформирователь 72 луча, дающие инструкции зонду относительно синхронизации, частоты, направления и фокусировки переданных лучей на плоскости 2D изображения или в 3D объемах. Контроллер формы луча также управляет формированием лучей эхосигналов, принятых подсистемой сбора, с помощью управления аналого-цифровыми (А/Ц) преобразователями 18 и формирователем 20 луча. Частично сформированные лучи эхо-сигналов, принятые зондом, усиливаются схемой 16 предусилителя и ДРУ (дифференциальная регулировка усиления) в подсистеме сбора, затем оцифровываются А/Ц преобразователями 18. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные лучи формирователем 20 луча. Эхо-сигналы затем обрабатываются процессором 22 изображений, который осуществляет цифровую фильтрацию, обнаружение в B-режиме и доплеровскую обработку, а также может выполнять другие обработки сигнала, такие как разделение гармоник, понижение уровня спеклов и другие требуемые обработки сигнала изображения.
Эхо-сигналы, производимые подсистемой 10A сбора, связываются с подсистемой 10B отображения, которая обрабатывает эхо-сигналы для отображения в нужном формате изображения. Эхо-сигналы обрабатываются процессором 24 строки изображения, который выполнен с возможностью провести дискретизацию по времени эхо-сигналов, сопряжение сегментов лучей в полные линейные сигналы и усреднение линейных сигналов для улучшения отношения сигнал-шум или установки уровня усреднения потока. Строки изображения для двумерного изображения сканирования преобразуются в нужный формат изображения посредством сканирующего преобразователя 26, который выполняет преобразование полярных координат, как известно в данной области техники. Затем изображение сохраняется в памяти 28 для хранения изображений, из которой оно может быть отображено на устройстве 38 отображения. Изображение в памяти также совмещается с графиками, которые должны отображаться с изображением, которые генерируются генератором 34 графических изображений. Отдельные изображения или последовательности изображений могут быть сохранены в кино-памяти 30 в течение фиксации циклов изображений или последовательностей.
В некоторых реализациях может быть желательно получение изображения на отдельных фазах сердечного цикла плода. Генератор 54 частоты сердечных сокращений плода обеспечивает эту возможность. Генератор частоты сердечных сокращений плода синтезирует периодичность сердечного цикла плода, как описано в международных патентных публикациях WO 2011/001309 (Jago и др.) и WO 2011/158136 (Schauf). Генератор частоты сердечных сокращений плода производит стробирующий сигнал на выбранной фазе сердца плода, которую можно использовать для стробирования сбора изображений или обработки, как описано ниже.
В соответствии с принципами настоящего изобретения подсистема отображения включает в себя данные 32 модели сердца для сердца плода. Данными модели сердца являются данные 3D анатомической сеточной модели сердца плода, как описано в патенте США №2008/0304744 (Peters и др.) и в предварительной заявке США №61/569450, поданной 12 декабря 2011 (Radulescu и др.). Такая модель представляет собой структуру сердца, включающую в себя его внутреннее пространство и наружную структуру, такую как кровеносные сосуды и клапаны. Модель сердца может быть моделью одной фазы сердца, такой как конечная диастола, или она может включать в себя несколько моделей сердца при разных фазах сердечного цикла. Для настоящего изобретения важно, что отдельные плоскости могут быть извлечены из данных модели сердца и сопоставлены или совмещены с фактическими ультразвуковыми 2D-изображениями плода. Это совмещение выполняется процессором 36 совмещения изображений, который принимает ультразвуковые изображения сердца плода, производимые сканирующим преобразователем 26, и совмещает их с соответствующей плоскостью данных модели сердца. Сопоставление с плоскостью модели сердца запускает формирование данных 44 об ориентации плоскости изображения, которые, в свою очередь, объединяют координаты плоскости изображения или данные об ориентации в стробирующий сигнал контроллеру 74 формы луча, который в ответ направляет матричный зонд для того, чтобы сканировать идентифицированную плоскость изображения. Информация о координатах плоскости для ориентации плоскости изображения предоставляется из данных модели сердца. Данные 32 модели сердца доступны для выбранных плоскостей 42 изображения, которые выбираются из панели 40 управления пользователя. Генератор 54 сигналов режима синхронизации с ЭКГ соединен с процессором 36 совмещения изображений.
Один из способов использования ультразвуковой системы, показанной на Фиг. 1, для получения стандартных изображений для исследования сердца плода показан на Фиг. 2. На этапе 202 пользователь выбирает стандартные срезы, которые желательны для этого конкретного исследования сердца плода. Как указано выше, типичные стандартные срезы включают в себя четырехкамерный срез, выводные тракты ЛЖ, выводные тракты ПЖ, пятикамерный срез, срез через три главных сосуда и срез трахеи. Пользователь может выбрать эти стандартные срезы из списка стандартных срезов, доступных из выпадающего списка на дисплее системы. Пользователь выбирает требуемые срезы с помощью управления панели 40 управления, и плоскости изображения выбранных срезов сохраняются в 42, где они используются для выбора срезов из плоскостей из данных 32 модели сердца. На этапе 204 пользователь прижимает апертуру матричного зонда напротив живота пациента и манипулирует зондом до тех пор, пока не найдет подходящее акустическое окно, из которого пользователь может сформировать изображение сердца плода. На этапе 206 пользователь манипулирует матричным зондом, который в это время сканирует только одну плоскость 2D изображения до тех пор, пока плоскость изображения не пересечет сердце плода и не получит изображение первого выбранного среза сердца. Как правило, этот первый стандартный срез будет четырехкамерным срезом сердца плода. Этот первый стандартный срез соединяется с процессором 36 совмещения изображений, который на этапе 208 совмещает ультразвуковое изображение с плоскостью модели сердца. Совмещение ультразвукового изображения с моделью сердца описано в вышеуказанной публикации Peters и др. и заявке Radulescu и др. и наглядно иллюстрируется в положении a) на Фиг. 5.С левой стороны положения a) находится четырехкамерное ультразвуковое изображение 502 сердца плода, и с правой стороны положения a) находится четырехкамерная плоскость 504 3D-модели сердца плода. Плоскость 504 модели сердца ориентирована по отношению к поперечному сечению нисходящей аорты 122' в нижней части в соответствии с ее расположением в 122 на ультразвуковом изображении 502. Камеры сердца на ультразвуковом изображении были помечены (RA, LA, RV, LV), и их соответствие с камерами на плоскости 504 модели сердца является очевидным. Таким образом, процессор совмещения изображений определяет плоскость модели сердца, которая наиболее близко соответствует анатомии четырехкамерного среза 502, используя инструменты, такие как блочное сравнение пикселей ультразвукового изображения в разных плоскостях через данные модели сердца. Стрелка на плоскости 504 модели сердца и на других показанных плоскостях модели сердца указывает анатомические ориентиры на плоскостях модели сердца, которые можно легче всего найти и сопоставить с ультразвуковыми изображениями, ускоряя процесс совмещения. На Фиг. 5 также показано сопоставление других стандартных срезов в модели сердца. Положение b) иллюстрирует изображение 506 выводного тракта ЛЖ в соответствии с выводным трактом ЛЖ плоскости 508 модели сердца плода, и положение с) иллюстрирует изображение 510 среза протоковой дуги в соответствии с протоковой дугой плоскости 512 модели сердца. Как видно, изображение 510 протоковой дуги перевернуто по отношению к плоскости 512 модели сердца. Это может быть решено путем переворачивания ультразвукового изображения, как описано в патентах США 6669641 (Poland и др.), или путем обращения на противоположные данные модели сердца в процессе совмещения, как описано в вышеуказанных публикации Peters и др. и заявке Radulescu и др.
После того как была найдена плоскость модели сердца, которая лучше всего соответствует анатомии первого стандартного среза ультразвукового изображения, ориентации других выбранных стандартных срезов могут быть легко идентифицированы с помощью модели сердца. Когда первая плоскость стандартного среза будет идентифицирована в модели сердца, из модели сердца станут известны относительные ориентации других плоскостей стандартного среза на основании априорных статистических данных о нормальных геометрических соотношениях структур внутри сердца плода. Например, когда конкретная плоскость модели сердца идентифицируется как четырехкамерный срез, следующий стандартный срез может находиться, например, в плоскости, повернутой на 35° и наклоненной на 15° по отношению к плоскости четырехкамерного среза в модели. Координаты этой повернутой и наклоненной плоскости связаны с данными 44 об ориентации плоскости изображения и используются для управления матричным зондом для сканирования второй плоскости изображения в этой конкретной ориентации по отношению к первой плоскости стандартного среза. Аналогично, координаты плоскости других выбранных стандартных плоскостей находятся в данных модели сердца, связанных с данными об ориентации плоскости изображения, и используются для стробирования сканирования дополнительных плоскостей изображения во всех выбранных плоскостях стандартного среза, как указано на этапе 210. На этапе 212 выбранные стандартные срезы отображаются на ультразвуковом дисплее 38 в режиме реального времени. На Фиг. 6 показан экран дисплея ультразвуковой системы, на котором в режиме реального времени отображаются три таких стандартных среза. В левом верхнем квадранте экрана показан четырехкамерный срез 602 прямой передачи, в правом верхнем квадранте показан срез 610 протоковой дуги в прямой передаче, и в левом нижнем квадранте показан срез 606 прямой передачи выводного тракта ЛЖ. Три среза могут одновременно отображаться в режиме реального времени, потому что только три плоскости изображения должны быть отсканированы в сменяющем друг друга следовании, а не весь 3D объем, из которого должны быть определены и извлечены MPR кадры. Когда в качестве исходного стандартного среза используется четырехкамерный срез 602, другие стандартные срезы будут, как правило, находиться в плоскостях, которые также пересекают апертуру преобразователя, позволяя всем стандартным срезам отображаться как изображения в B-режиме. Это наиболее желательно, так как изображение в C-режиме потребует фактически того же времени сканирования, как полного объема, и преимущество сканирования с высокой частотой кадров только нескольких плоскостей будет утрачено. Реализация Фиг. 6 содержит графическую иконку 610 типичного сердца 612 плода, который показывает пользователю, как плоскости 614 изображений пересекают сердце. Контур графического изображения 612 сердца плода может быть предоставлен моделью 32 сердца плода. Каждое изображение на Фиг. 6 очерчено прямоугольником. Когда пользователь выбирает манипулятором типа «мышь» изображение, его прямоугольник подсвечивается, указывая, что графическое изображение 614 плоскости показывает ориентацию этого изображения по отношению к сердцу. Альтернативно, каждый прямоугольник может быть очерчен разными цветами, и несколько графических изображений 614 плоскостей такого же цвета могут отображаться на графическом изображении одновременно. Другая возможность, предоставляемая дисплеем, состоит в построении трех плоскостей в трех измерениях, изображающих относительную ориентацию всех трех изображений в режиме реального времени. Изображения в режиме реального времени также могут быть перекрыты посредством подвижных курсоров 13, 14 и 15 (смотри Фиг. 5), которые могут быть передвинуты пользователем, и выбираемых манипулятором типа «мышь» элементов 12 управления настройками изображения для показа плоскостей изображения, ортогональных плоскостям стандартного среза. Другим графическим изображением, которое обычно отображается с изображениями, является частота сердечных сокращений плода, производимая генератором 54 частоты сердечных сокращений плода, что является важным фактором для многих диагнозов.
В принципе, в работе и управлении матричным зондом в реализации согласно настоящему изобретению можно использовать элементы функциональности матричного зонда при работе в двухпроекционном режиме. Патенты США 6709394 (Frisa и др.) и 6755786 (Frisa и др.) описывают ультразвуковую двухпроекционную визуализацию. При двухпроекционной визуализации зонд с двумерным матричным преобразователем сканирует две различные двумерные плоскости изображения в быстром сменяющем друг друга следовании, тем самым производя изображения прямой передачи в реальном времени в обеих плоскостях. Одна из плоскостей изображения определяется как опорная плоскость изображения. Эта плоскость изображения ориентирована, как правило, перпендикулярно плоскости матричного преобразователя, продолжаясь прямо от зонда вокруг центральной ортогональной оси к массиву. Ориентацию опорного изображения обычно поддерживают неподвижной, а вторая плоскость изображения может двигаться пользователем по отношению к этой опорной плоскости. В патенте '394 описана двухпроекционная визуализация, при которой вторую плоскость изображения можно наклонять или поворачивать относительно опорной плоскости. В коммерческом варианте осуществления, доступном от Philips Healthcare of Andover, MA, наклоненная плоскость изображения имеет заданную ориентацию центральной оси на одной линии с центральной осью опорной плоскости. Наклонную плоскость можно двигать (наклонять) таким образом, что она ориентируется под разными углами по отношению к центральной оси опорной плоскости, но ее центральная ось всегда расположена в опорной плоскости. Эта реализация двухпроекционного вращения, в свою очередь, имеет поначалу центральную ось второй (поворачивающейся) плоскости изображения, выровненной с центральной осью опорного изображения, и ориентация второго изображения ортогональна плоскости опорного изображения. Из этого исходного положения поворачивающуюся плоскость можно поворачивать вокруг ее центральной оси под углами относительно опорного изображения, которые отличаются от прямого.
Патент '786 описывает то, что известно как двухпроекционная визуализация с изменением по высоте и наклоном. При визуализации с изменением по высоте и наклоном второе изображение имеет исходное положение на одной линии с опорным изображением. Затем второе изображение отодвигают от опорной плоскости изображения в вертикальном направлении и могут отодвигать к разным плоскостям, которые не пересекают опорную плоскость изображения в интересующей области. Таким образом, две плоскости могут быть абсолютно параллельны или параллельны под углом, причем последнее является состоянием, когда вторая плоскость имеет общее с опорной плоскостью расположение вершины или пересекает опорную плоскость выше верха (на незначительную глубину) изображения. Двухпроекционные изображения позволяют клиницисту позиционировать опорную плоскость так, чтобы просмотреть целевую анатомию или интересующую область, а затем перемещать вторую плоскость для наблюдения других плоскостных изображений целевой анатомии. Как показано в вышеприведенных патентах, два двухпроекционных изображения отображаются рядом одновременно, так что клиницист может постоянно видеть опорное изображение при движении второй плоскости. Двухпроекционная визуализация позволяет клиницисту сканировать и наблюдать две плоскости изображения одновременно, при постоянном сохранении координат местоположений изображений внутри трехмерного объема, подлежащего сканированию, его или ее навигационным средством. Когда клиницист определяет место интересующей анатомии на обеих плоскостях изображения, одиночное изображение или цикл (последовательность изображений прямой передачи) могут быть зафиксированы или сохранены и отображены или воспроизведены позже при постановке окончательного диагноза. Реализация согласно настоящему изобретению может использовать два (двухпроекционных) изображения, когда требуются только два стандартных среза, и распространяется на изображения дополнительных плоскостей, когда нужны три стандартных среза или более. Центральная опорная плоскость изображения двухпроекционной визуализации может использоваться для получения исходного стандартного среза, такого как четырехкамерный срез. Когда четырехкамерный срез видно на опорном изображении, процессор 36 совмещения изображений сопоставляет изображение с ближайшей четырехкамерной плоскостью модели сердца, и модель сердца предоставляет относительные ориентации других требуемых стандартных срезов из их положений в модели сердца. Эти ориентации плоскостей увязываются в контроллере 74 формы луча, который затем автоматически начинает сканирование и отображение изображений этих других срезов в режиме реального времени. Если плод движется во время исследования, пользователь должен только переместить зонд для того, чтобы повторно захватить четырехкамерный срез в опорной плоскости изображения, процессор совмещения изображений снова сопоставляет изображение с четырехкамерной плоскостью модели сердца, ориентации других стандартных срезов идентифицируются в модели сердца, соединенной с контроллером формы луча, и возобновляется визуализация прямой передачи всех стандартных срезов.
Реализация согласно настоящему изобретению может работать с фиксированной моделью сердца или моделью, которую можно настроить. Например, модель сердца может быть моделью, которая представляет сердце в фазе конечной диастолы сердечного цикла. Затем совершается процесс совмещения изображения с изображением, зафиксированным в этой фазе сердцебиения плода. Это может быть сделано путем использования генератора 54 частоты сердечных сокращений плода, который может стробировать изображения в выбранных фазах сердечного цикла плода, который позволяет процессору совмещения выполнять сопоставление в тот момент, когда было получено изображение конечной диастолы.
На Фиг. 3 показан способ согласно настоящему изобретению, где модель сердца адаптируется к конкретному плоду. На этапе 302 установки пользователь не только выбирает стандартные срезы, которые требуются, но также вводит характеристики плода, такие как внутриутробный возраст плода, форму и развитие сердца плода, известные или подозреваемые нарушения сердечной деятельности или пороки развития или другую информацию, которая более конкретно описывает сердце плода, которое должно исследоваться. Эта информация затем используется на этапе 308 для адаптации модели сердца к конкретному плоду. Один из способов адаптации состоит в том, чтобы иметь библиотеку различных моделей сердца плода для разных внутриутробных возрастов плода. Ввод данных о внутриутробном возрасте плода позволяет выбрать модель сердца, которая наиболее близко подходит внутриутробному возрасту плода, который будет исследоваться, делая совмещение изображения проще и надежнее. Другой способ адаптации состоит в том, чтобы трансформировать или деформировать модель сердца к размеру и форме элементов в полученном изображении сердца плода, как описано в вышеуказанных публикации Peters и др. и заявке Radulescu и др. Смотри также международную патентную публикацию WO 2007/034425 (Ecabert и др.). Данная модель сердца может быть адаптирована практически к любым изображениям сердца плода и к разным фазам сердечного цикла. Изображение исходного стандартного среза совмещается с адаптированными данными модели сердца на этапе 310, и идентификация, сканирование и отображение других изображений стандартных срезов происходят на этапах 210 и 212, как и ранее.
На Фиг. 4 показана реализация с еще более высокой степенью автоматизации согласно настоящему изобретению. В этом способе пользователь начинает визуализацию не в 2D, а в 3D-режиме сбора данных. На этапе 404 пользователь находит подходящее 3D акустическое окно, из которого изображается все сердце плода в 3D, и на этапе 406 получается объемное изображение сердца плода. Процессор совмещения затем сопоставляет, по меньшей мере, одну плоскость объемного изображения так же, как при MPR реконструкции, например, с соответствующей плоскостью в модели 32 сердца. Плоскости стандартных срезов затем идентифицируются в модели сердца либо путем сопоставления всех плоскостей стандартного среза объемного ультразвукового изображения с соответствующими плоскостями модели сердца, либо посредством относительных ориентаций плоскостей стандартного среза модели сердца с одной сопоставляемой плоскостью модели ультразвукового изображения- сердца. Ориентации плоскостей стандартного среза поставляются матричному зонду (этап 210), который начнет сканирование и отображение 2D-плоскостей выбранного стандартного среза (этап 212). При этой реализации пользователь не должен находить даже первоначальный стандартный срез. Надо только захватить данные объемного изображения сердца плода, и ультразвуковая система идентифицирует и извлекает нужные плоскости стандартного среза и начинает их визуализацию без последующего ввода пользователя. Способ, показанный на Фиг. 4, может также включать адаптацию модели сердца, как уже было указано в описании Фиг. 3.
Для учета движения зонда или плода в способе, показанном на Фиг. 4, матричный зонд периодически получает другой набор данных объемного изображения на этапе 414. Новые данные объемного изображения снова используются, начиная с шага 406, для повторного определения ориентаций плоскостей стандартного среза и обновляют управление матричного зонда для того, чтобы изобразить требуемые плоскости стандартного среза. Пользователю необходимо только поместить зонд таким образом, чтобы полный набор данных объемного изображения мог непрерывно собираться по мере необходимости. Таким образом, система может продолжать отслеживать и отображать требуемые стандартные срезы в режиме реального времени без какого-либо взаимодействия с пользователем, что упрощает и ускоряет способность производить диагностику плода.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СЕГМЕНТАЦИЯ ТРЕХПЛОСКОСТНЫХ ИЗОБРАЖЕНИЙ ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ | 2014 |
|
RU2677055C2 |
| АВТОМАТИЧЕСКИЙ ВЫБОР ПЛОСКОСТИ ВИЗУАЛИЗАЦИИ ДЛЯ ЭХОКАРДИОГРАФИИ | 2012 |
|
RU2642929C2 |
| АВТОМАТИЗИРОВАННАЯ РАЗВЕРТКА И ЭКСПОРТ ДВУМЕРНЫХ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ ТРЕХМЕРНЫХ ОБЪЕМОВ | 2011 |
|
RU2577938C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| АНАТОМИЧЕСКИ ИНТЕЛЛЕКТУАЛЬНАЯ ЭХОКАРДИОГРАФИЯ ДЛЯ МЕСТА ОКАЗАНИЯ МЕДИЦИНСКОГО ОБСЛУЖИВАНИЯ | 2013 |
|
RU2674228C2 |
| УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА АНАТОМИЧЕСКИХ ОСОБЕННОСТЕЙ | 2018 |
|
RU2778840C2 |
| ФОРМИРОВАНИЕ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ СЕРДЦА ПЛОДА ПОСРЕДСТВОМ ФИЗИОЛОГИЧЕСКИ СТРОБИРОВАННОГО ПОЛУЧЕНИЯ ДАННЫХ, НЕ СВЯЗАННОГО С ЭКГ | 2010 |
|
RU2539006C2 |
| НАПРАВЛЯЕМЫЕ УЛЬТРАЗВУКОМ БИОПСИИ В ТРЕХ ИЗМЕРЕНИЯХ | 2013 |
|
RU2629237C2 |
| СИСТЕМА ТРЕХМЕРНОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2657855C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |



Группа изобретений относится к медицинской технике, а именно к медицинским системам ультразвуковой диагностики. Система ультразвуковой диагностики содержит матричный зонд, выполненный с возможностью сканирования в режиме реального времени множества плоскостей изображения в области тела, контроллер для управления сканированием посредством матричного зонда, процессор изображений, соединенный с матричный зондом, дисплей, соединенный с процессором изображений, данные, представляющие анатомическую модель анатомического объекта, процессор совмещения изображений, при этом контроллер сконфигурирован для побуждения матричного зонда сканировать в режиме реального времени плоскость изображения, соответствующую данным ориентации плоскости изображения. Способ ультразвуковой визуализации содержит выбор множества отличных друг от друга плоскостей изображения анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения, позиционирование матричного зонда в акустическом окне для целевого анатомического объекта, получение 2D-изображения первой плоскости анатомического объекта, совмещение 2D-изображения с данными анатомической модели целевого анатомического объекта, идентификацию данных ориентации второй плоскости изображения целевого анатомического объекта в ответ на совмещение 2D-изображения первой плоскости, при этом координаты плоскости второй плоскости изображения находятся из данных анатомической модели, управление посредством контроллера формы луча матричным зондом для сканирования первой плоскости и второй плоскости изображения в режиме реального времени в ответ на данные об ориентации, причем данные об ориентации соединяют в стробирующий сигнал для контроллера формы луча, и одновременное отображение ультразвуковых изображений первой плоскости и второй плоскости изображения в режиме реального времени. В способе ультразвуковой визуализации по второму варианту выполнения способа получают объем данных объемного изображения целевого анатомического объекта, совмещают одну плоскость из набора данных с данными анатомической модели и идентифицируют данные об ориентации множества выбранных плоскостей изображения в ответ на совмещение одной плоскости изображения из набора данных объемного изображения. Использование группы изобретений позволяет получить стандартные срезы целевой анатомии в режиме реального времени. 3 н. и 12 з.п. ф-лы, 6 ил.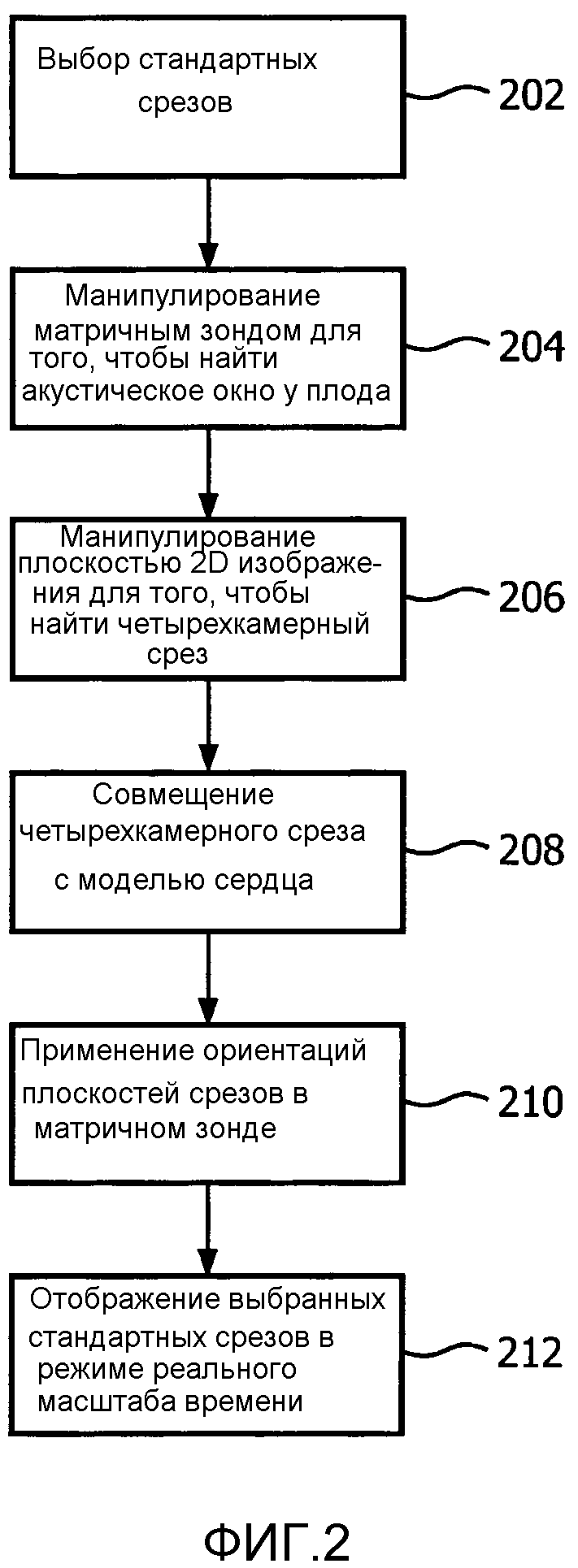
1. Система ультразвуковой диагностики для визуализации нескольких плоскостей целевого анатомического объекта, содержащая:
матричный зонд, выполненный с возможностью сканирования в режиме реального времени множества плоскостей изображения в области тела;
контроллер для управления сканированием посредством матричного зонда;
процессор изображений, соединенный с матричный зондом, выполненный с возможностью формирования в режиме реального времени ультразвуковых изображений плоскостей изображения, сканируемых матричным зондом;
дисплей, соединенный с процессором изображений, для отображения ультразвуковых изображений в режиме реального времени;
данные, представляющие анатомическую модель анатомического объекта;
процессор совмещения изображений, выполненный с возможностью совмещения ультразвукового изображения с данными, представляющими анатомическую модель, генерирования данных ориентации плоскости изображения, выделенных из анатомической модели в ответ на совмещение ультразвукового изображения, и передачи данных ориентации плоскости изображения контроллеру,
при этом контроллер сконфигурирован для побуждения матричного зонда сканировать в режиме реального времени плоскость изображения, соответствующую данным ориентации плоскости изображения.
2. Система ультразвуковой диагностики по п. 1, в которой в качестве целевого анатомического объекта рассматривается сердце плода и анатомическая модель содержит модель сердца, при этом
процессор совмещения изображений обеспечивает совмещение опорного 2D-изображения сердца плода с плоскостью анатомической модели, при этом
данные об ориентации плоскости изображения идентифицируют по меньшей мере одну плоскость изображения стандартного среза.
3. Система ультразвуковой диагностики по п. 2, дополнительно содержащая пользовательский блок управления, посредством которого пользователь выбирает множество стандартных срезов.
4. Система ультразвуковой диагностики по п. 3, в которой опорное 2D-изображение сердца плода дополнительно содержит четырехкамерный срез.
5. Система ультразвуковой диагностики по п. 4, в которой по меньшей мере одна плоскость изображения стандартного среза является плоскостью изображения выводного тракта ЛЖ, или выводного тракта ПЖ, или пятикамерным срезом, или срезом через три главных сосуда, или срезом трахеи.
6. Система ультразвуковой диагностики по п. 5, в которой дисплей отображает одновременно ультразвуковые изображения множества стандартных срезов в режиме реального времени и
в которой дисплей дополнительно отображает графическую иконку сердца, указывающую относительную ориентацию плоскости по меньшей мере одного ультразвукового изображения в режиме реального времени сердца плода.
7. Способ ультразвуковой визуализации множества различных выбранных плоскостей изображения целевого анатомического объекта в режиме реального времени, содержащий:
выбор множества отличных друг от друга плоскостей изображения анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения;
позиционирование матричного зонда в акустическом окне для целевого анатомического объекта;
получение 2D-изображения первой плоскости анатомического объекта;
совмещение 2D-изображения с данными анатомической модели целевого анатомического объекта;
идентификацию данных ориентации второй плоскости изображения целевого анатомического объекта в ответ на совмещение 2D-изображения первой плоскости, при этом координаты плоскости второй плоскости изображения находятся из данных анатомической модели;
управление посредством контроллера формы луча матричным зондом для сканирования первой плоскости и второй плоскости изображения в режиме реального времени в ответ на данные об ориентации, причем данные об ориентации соединяют в стробирующий сигнал для контроллера формы луча; и
одновременное отображение ультразвуковых изображений первой плоскости и второй плоскости изображения в режиме реального времени.
8. Способ по п. 7, в котором качестве целевого анатомического объекта рассматривают сердце плода и анатомическая модель содержит модель сердца, при этом
первая плоскость и вторая плоскость изображения дополнительно содержат плоскости изображения стандартных срезов сердца плода.
9. Способ по п. 7, дополнительно содержащий отображение графической иконки, которая определяет относительные ориентации одной из плоскостей анатомического объекта.
10. Способ по п. 7, дополнительно содержащий адаптацию анатомической модели к характеристикам пациента.
11. Способ по п. 10, дополнительно содержащий:
ввод данных характеристик пациента в ультразвуковую систему и
адаптацию анатомической модели к введенным данным характеристик пациента.
12. Способ по п. 11, в котором адаптация анатомической модели к введенным данным характеристик пациента дополнительно содержит выбор данных анатомической модели в ответ на введенные данные характеристик пациента.
13. Способ по п. 10, в котором адаптация анатомической модели дополнительно содержит деформацию или трансформацию данных анатомической модели в 2D-изображении.
14. Способ ультразвуковой визуализации множества различных выбранных плоскостей изображения целевого анатомического объекта в режиме реального времени, содержащий:
выбор множества отличных друг от друга плоскостей изображения целевого анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения;
позиционирование матричного зонда в акустическом окне на целевом анатомическом объекте;
получение набора данных объемного изображения целевого анатомического объекта;
совмещение по меньшей мере одной плоскости из набора данных объемного изображения с данными анатомической модели целевого анатомического объекта;
идентификацию данных об ориентации множества выбранных плоскостей изображения целевого анатомического объекта в ответ на совмещение по меньшей мере одной плоскости изображения из набора данных объемного изображения, при этом плоскости стандартного среза идентифицируют в анатомической модели;
управление посредством контроллера формы луча матричным зондом для сканирования множества выбранных плоскостей изображения в ответ на данные ориентации плоскостей стандартного среза, причем данные об ориентации соединяются в стробирующем сигнале для контроллера формы луча; и
одновременное отображение ультразвуковых изображений выбранных плоскостей изображения в режиме реального времени.
15. Способ по п. 14, дополнительно включающий в себя:
периодическое получение другого набора данных объемного изображения целевого анатомического объекта и
обновление данных об ориентации в ответ на другой набор данных объемного изображения.
| US 2008009722 A1 10.01.2008 | |||
| US 2012078097 A1 29.03.2012 | |||
| US 2005251036 A1 10.11.2005 | |||
| US 5050610 A 24.09.1991 | |||
| US 2005283079 A1 22.12.2005 | |||
| US 2007249935 A1 25.10.2007. |

