Изобретение относится к области измерительной техники, а именно к системам измерения усилий в стержнях, тягах и других протяженных элементах конструкций, нагруженных осевой силой, и может быть использовано в любой отрасли народного хозяйства, где они применяются, и, в частности, в ракетной технике.
Широко известен способ обеспечения заданного усилия затяжки резьбовых изделий (болтов) с помощью фиксированного момента на головке болта или на гайке (см. Г.Б.Иосилевич, Ю.В.Шарловский «Затяжка и стопорение резьбовых соединений», издательство «Машиностроение», Москва, 1971 г., глава 1, стр.17, формула 23). В регулируемых тягах для обеспечения заданного усилия натяжения наиболее часто используются стяжные втулки (талрепы), включающие в себя концы с правой и с левой резьбой и элемент для вращения талрепа. В этом случае указанный способ натяжения тяг является самым простым и дешевым. Но, как видно из анализа зависимости между усилием затяжки и крутящим моментом, этим способом фактически «измеряется» момент трения при затяжке. Крутящий момент (момент затяжки) при этом зависит от величины сил трения в резьбовых парах, которые, в свою очередь, очень сильно зависят от материалов резьбовых пар, состояния контактных поверхностей и других трудноучитываемых факторов. Кроме того, величина момента затяжки зависит от усилия затяжки, количества затяжек, моменты затяжки при нагружении и при снятии нагрузки не совпадают по величине. В силу вышеизложенного, можно с приемлемой погрешностью оценить усилие затяжки высоконагруженных (максимально деформированных при нагружении) конструкций, но для мало- и средненагруженных конструкций, работающих в зоне упругой деформации материалов, этот способ малопригоден из-за значительного влияния фактического состояния в момент затяжки материалов резьбовых пар и контактных поверхностей, и, как следствие, большого отклонения фактического значения усилия затяжки от измеренного.
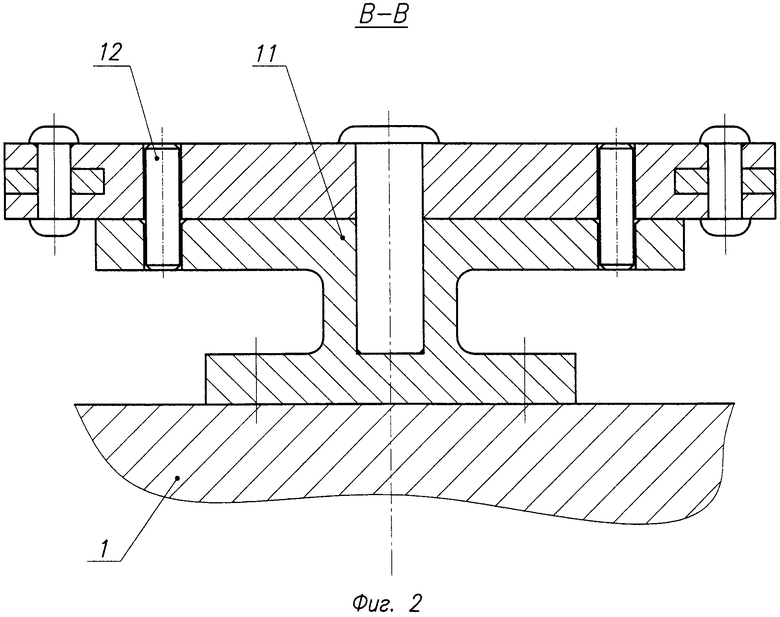
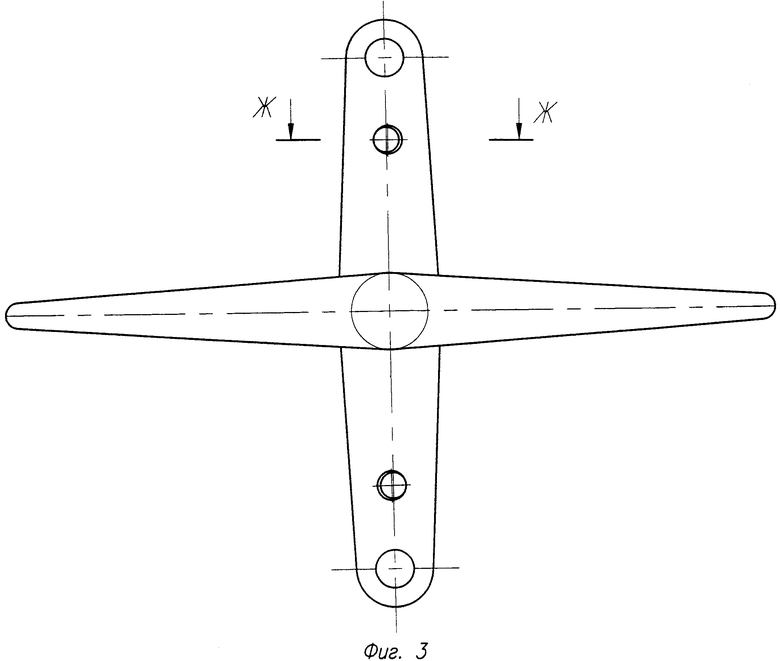
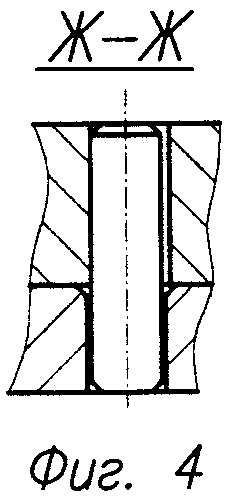
Предложенное техническое решение поясняется чертежами на примере натяжения тяг, используемых для управления рулями крылатой ракеты. На фиг.1 представлена конструктивная схема управления рулями крылатой ракеты с помощью тяг приводом, удаленным от руля; на фиг.2, 3 и 4 приведен вариант исполнения способа натяжения спаренных тяг.
Существуют крылатые ракеты, где в силу различных обстоятельств рулевые агрегаты (приводы) отделены от рулей ракеты и расположены на значительном расстоянии от них. Схематично эти конструкции выглядят следующим образом: закрепленный на корпусе ракеты 1 привод 2 шарнирно соединен с установленным на оси вращения 3 двуплечим рычагом 4, который в свою очередь с помощью двух тяг 5 связан с установленным на оси вращения 6 двуплечим рычагом 7, выполненным заодно с рулем 8 и установленным на основании 11.
Чаще всего по причине минимизации массы и минимального конструктивного пространства тяги 5 выполняются нежесткими, в силу чего могут работать только на растяжение. Для натяжения тяги снабжены стяжными втулками (талрепами) 9. При этом тяги 5 должны быть натянуты так, чтобы при передаче крутящего момента на поворот рулей ни одна из тяг не провисала (в противном случае усилие на одной тяге в момент провиса другой скачком возрастет вдвое, что может привести к разрыву тяги), одним словом, требования к усилиям натяжения тяг достаточно жесткие - с другой - не должно быть слишком большие, чтобы не перетяжелять конструкцию.
Для обеспечения равномерной передачи управляющего момента необходимо, чтобы оси А и Д, проходящие через оси вращения и тяги рычагов, были перпендикулярны плоскости симметрии Е. Этого можно достичь следующим образом.
В двуплечих рычагах 4 и 7 делаются отверстия 10 (см. фиг.2) таким образом, чтобы центры отверстий 10 и оси вращения 3 и 6 лежали в одной плоскости и находились на осях А и Д. Аналогично выполняются ответные отверстия в основании 11. Систему тяг 5 в «расслабленном» состоянии устанавливают на основание 11. В совмещенные отверстия 10 на двуплечих рычагах 4 и 7 вставляют технологические штыри. После чего одну из тяг при помощи талрепа 9 натягивают до необходимого состояния. Натяжение одной тяги 5 приведет к перекосу системы и, как следствие, к зажатию технологического штыря 12 в отверстии 10 (см. фиг.3, 4). Далее при помощи талрепа 9 начинаем натягивать вторую тягу 5 до полного освобождения штыря 12 от зажима («перекоса»), образовавшегося при натяжении первой тяги 5. Освобождение технологического штыря 12 из отверстия 10 будет свидетельствовать о том, что отверстия 10 в двуплечих рычагах 4 и 7 полностью совместились, и, следовательно, оси А и Д перпендикулярны плоскости Е, что будет соответствовать равному натяжению тяг.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЗАДАНОГО УСИЛИЯ НАТЯЖЕНИЯ СПАРЕННЫХ ТЯГ | 2012 |
|
RU2516647C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЗАДАННОГО УСИЛИЯ НАТЯЖЕНИЯ РЕГУЛИРУЕМОЙ МЕХАНИЧЕСКОЙ ТЯГИ | 2011 |
|
RU2484433C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2255022C1 |
| РАБОЧИЙ ОРГАН ТРУБООЧИСТНОЙ МАШИНЫ | 2001 |
|
RU2249491C2 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| Стенд для испытания износостойкости шарниров цепи | 1976 |
|
SU623125A1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА РУЛЯ РАКЕТЫ | 2010 |
|
RU2427798C1 |
Изобретение относится к области измерительной техники, а именно к системам измерения усилий в стержнях, тягах и других протяженных элементах конструкций, нагруженных осевой силой. Способ заключается в следующем. Спаренные тяги фиксируют относительно основания технологическими штырями, после чего натягивают одну тягу с контролем усилия, затем без контроля усилия вторую тягу до полного освобождения технологических штырей от зажима. Для обеспечения равномерной передачи управляющего момента необходимо, чтобы оси, проходящие через оси вращения и тяги рычагов, были перпендикулярны плоскости симметрии системы. Технический результат заключается в обеспечении заданного усилия натяжения тяг. 4 ил. 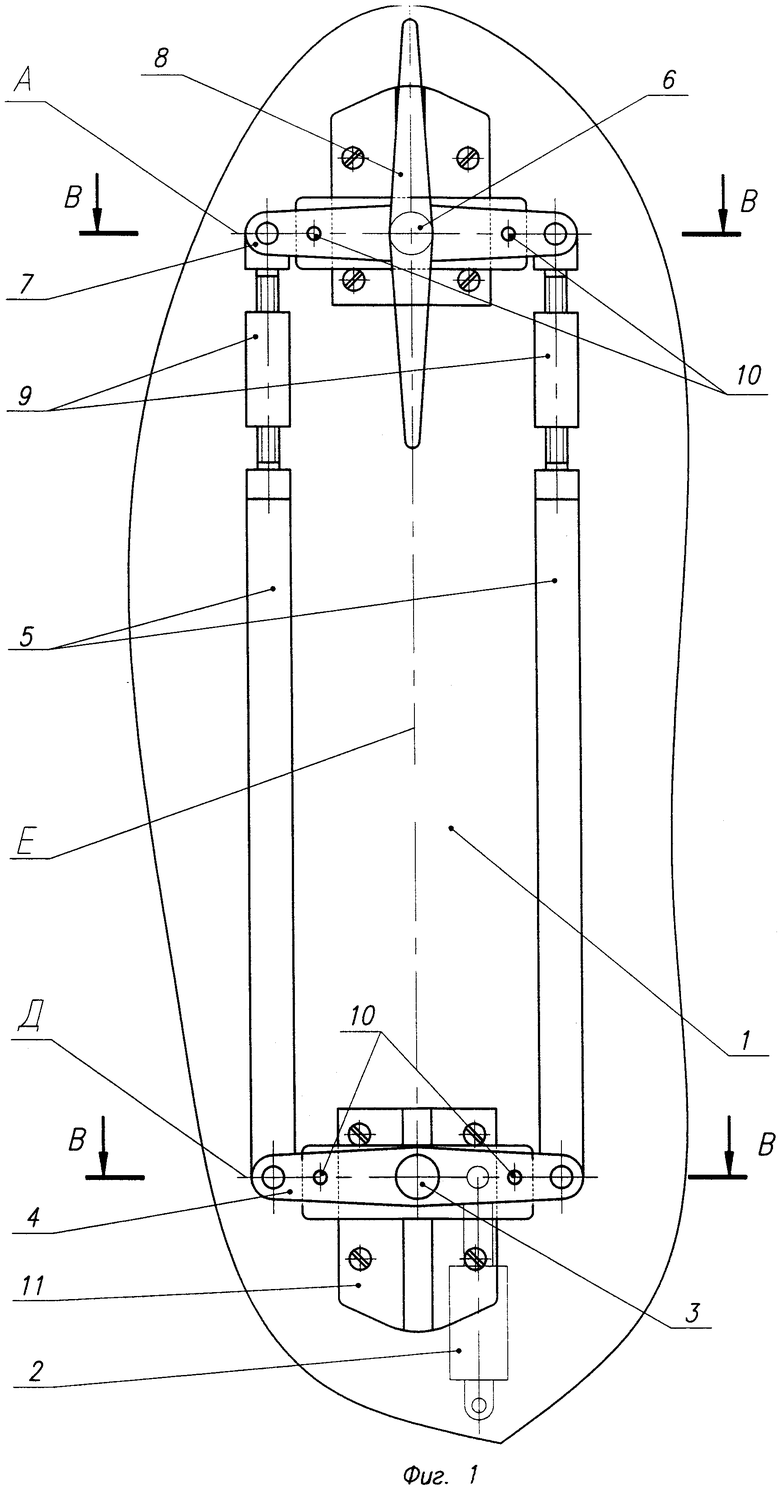
Способ натяжения спаренных тяг, заключающийся в последовательном натяжении на заданное усилие каждой из спаренных тяг, отличающийся тем, что рычаги, к которым подсоединены тяги, фиксируют относительно основания в заданном взаимном положении технологическими штырями, после чего натягивают одну тягу с контролем усилия, затем без контроля усилия вторую тягу до полного освобождения технологических штырей от зажима, образовавшегося при натяжении первой тяги.
| Иосилевич Г.Б., Шарловский Ю.В | |||
| Затяжка и стопорение резьбовых соединений | |||
| - М.: Машиностроение, 1971, стр.17 | |||
| Установка для укладки предварительно напряженной арматуры в форму | 1990 |
|
SU1815321A1 |
| RU 2009115674 A, 27.10.2010 | |||
| СИСТЕМА УПРАВЛЕНИЯ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2000 |
|
RU2178372C2 |

