Изобретение относится к области измерительной техники, а именно к системам измерения усилий в стержнях, тягах и других протяженных элементах конструкций, нагруженных осевой силой, и может быть использовано в любой отрасли народного хозяйства, где они применяются, и, в частности, в ракетной технике.
Широко известен способ обеспечения заданного усилия затяжки резьбовых изделий (болтов) с помощью фиксированного момента на головке болта или на гайке (см. Г.Б.Иосилевич, Ю.В.Шарловский, «Затяжка и стопорение резьбовых соединений», издательство «Машиностроение», Москва, 1971 г., глава 1, стр.17, формула 23). В регулируемых тягах для обеспечения заданного усилия натяжения наиболее часто используются стяжные втулки (талрепы), включающие в себя концы с правой и с левой резьбой и элемент для вращения талрепа. В этом случае указанный способ натяжения тяг является самым простым и дешевым. Но, как видно из анализа зависимости между усилием затяжки и крутящим моментом, этим способом фактически «измеряется» момент трения при затяжке. Крутящий момент (момент затяжки) при этом зависит от величины сил трения в резьбовых парах, которые, в свою очередь, очень сильно зависят от материалов резьбовых пар, состояния контактных поверхностей и других трудноучитываемых факторов. Кроме того, величина момента затяжки зависит от усилия затяжки (резьбовые пары быстрее деформируются), количества затяжек (момент второй и каждой последующей затяжки на одно и то же усилие затяжки уменьшается за счет выглаживания контактных поверхностей); моменты затяжки при нагружениии и при снятии нагрузки не совпадают по величине. В силу вышеизложенного можно с приемлемой погрешностью оценить усилие затяжки высоконагруженных (максимально деформированных при нагружении) конструкций, но для мало- и средненагруженных конструкций, работающих в зоне упругой деформации материалов, этот способ малопригоден из-за значительного влияния фактического состояния в момент затяжки материалов резьбовых пар и контактных поверхностей, и, как следствие, большого отклонения фактического значения усилия затяжки от измеренного - фактически определяется достаточно широкий диапазон значений усилий, одно из которых будет действительным.
Для гибких (нежестких) тяг можно применять способ контроля усилия натяжения по величине прогиба под действием приложенного к тяге перпендикулярного усилия (см. С.Рузга, «Электрические тензометры сопротивления», издательство «Мир», Москва, 1964 г., стр.325, 326, ст.«Силомер для измерения усилий в тросах»). Но, как указывается там же, для достоверности результатов даже для достаточно гибких реальных тросов надо вводить предварительно определенные эмпирические поправки. Для тяг другого вида, например для лент прямоугольного сечения, эти зависимости становятся и вовсе непригодными в силу повышенной жесткости. Даже по полученным эмпирическим путем данным при предварительной тарировке этих тяг нельзя утверждать о достоверности результатов измерений по той причине, что результаты измерений будут очень сильно зависеть от состояния тяги на измеряемом участке (прямолинейности, местной покоробленности, наличия внутренних напряжений в материале тяги и т.д.). Для жестких тяг этот способ и вовсе неприменим.
Наиболее достоверным и точным способом контроля усилия при натяжении является способ, основанный на применении электрических тензодатчиков (тензорезисторов) (см. Г.Б.Иосилевич, Ю.В.Шарловский, «Затяжка и стопорение резьбовых соединений», издательство «Машиностроение», Москва, 1971 г., стр.36-38, рис.36), закрепленных на элементе, входящем в состав тяги. Этим способом непосредственно измеряется деформация нагружаемого элемента, которая зависит только от приложенного усилия, и это решение принято авторами в качестве прототипа.
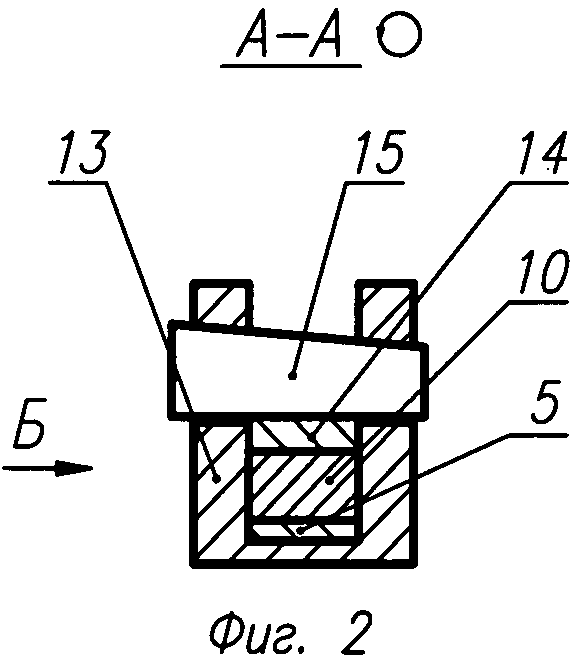
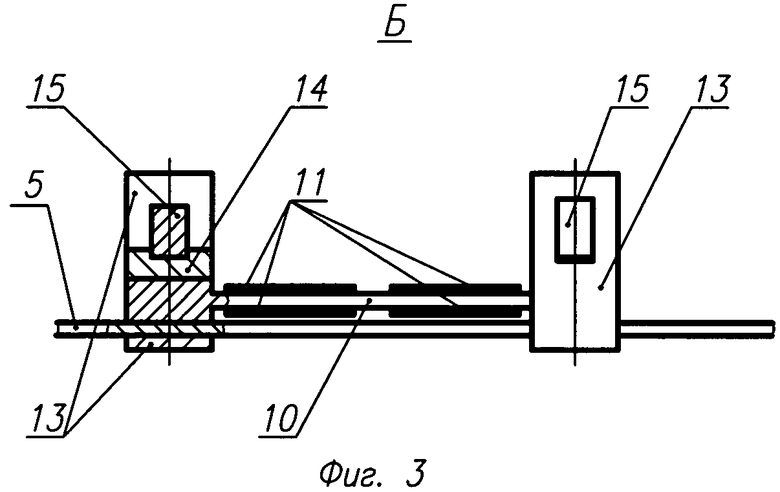
Предложенное техническое решение поясняется чертежами на примере натяжения тяг, используемых для управления рулями крылатой ракеты. На фиг.1 представлена конструктивная схема управления рулем крылатой ракеты с помощью тяг приводом, удаленным от руля, и местоположение на тяге съемного блока с тензодатчиками, на фиг.2 и 3 приведен вариант исполнения съемного элемента с тензодатчиками и зажимного устройства, а на фиг.4, 5 и 6 проиллюстрирован способ натяжения спаренных тяг, работающих совместно.
Существуют крылатые ракеты, где в силу различных обстоятельств рулевые агрегаты (приводы) отделены от рулей ракеты и расположены на значительном расстоянии от них. Схематично эти конструкции выглядят следующим образом: закрепленный на корпусе ракеты 1 привод 2 шарнирно соединен с установленным на оси вращения 3 двуплечим рычагом 4, который в свою очередь с помощью двух тяг 5 связан с установленным на оси вращения 6 двуплечим рычагом 7, выполненным заодно с рулем 8. Чаще всего по причине минимизации массы и минимального конструктивного пространства тяги 5 выполняются нежесткими, в силу чего могут работать только на растяжение. Для натяжения тяги снабжены стяжными втулками (талрепами) 9. При этом тяги 5 должны быть натянуты так, чтобы при передаче крутящего рабочего момента на поворот рулей ни одна из тяг не провисала (в противном случае усилие на одной тяге в момент провиса другой скачком возрастает вдвое, что может привести к разрыву тяги). Одним словом, требования к усилиям натяжения тяг достаточно жесткие, - с одной стороны, они не должны быть меньше минимальных (из условий работы), с другой, - не должны быть слишком большие, чтобы не перетяжелять конструкцию ракеты.
Для обеспечения равномерной передачи управляющего момента необходимо, чтобы оси А и Д, проходящие через оси вращения и тяги рычагов, были перпендикулярны плоскости симметрии Е. Этого можно достичь следующим образом.
Наиболее достоверным и точным является способ контроля усилия натяжения с помощью тензодатчиков, а в случае большого количества тяг - с помощью съемного технологического устройства, оснащенного тензодатчиками. Это устройство включает в себя съемный технологический элемент 10, по величине деформации которого определяется усилие натяжения в тяге 5, закрепленные на элементе 10 тензодатчики 11, автономное устройство декодирования сигналов 12 с тензодатчиков 11 и два зажима для крепления элемента 10 на тяге 5. Простейший зажим состоит из опоры 13, предохранительной прокладки 14 и зажимного клина 15. Измеряемая тяга 5 и съемный элемент 10 укладываются внутрь опоры 13 и поджимаются друг к другу через прокладку 14 клином 15. Усилие поджатия тяги и съемного элемента регулируется положением клина относительно боковых щек опоры.
Устройство работает следующим образом.
В двуплечих рычагах 4 и 7 делаются отверстия 16 (см. фиг.4) таким образом, чтобы центры отверстий 16 и оси вращения 3 и 6 лежали в одной плоскости и находились на осях С и Д. Аналогично выполняются ответные отверстия в основании 17. Систему тяг 5 в «расслабленном» состоянии устанавливают на основание 17. В совмещенные отверстия 16 на двуплечих рычагах 4 и 7 вставляют технологические штыри 18. После чего одну из тяг при помощи талрепа 9 натягивают до необходимого состояния. Натяжение одной тяги 5 приведет к перекосу системы, и, как следствие, к зажатию технологического штыря 18 в отверстии 16 (см. фиг.5 и 6). Далее при помощи талрепа 9 начинаем натягивать вторую тягу 5 до полного освобождения штыря 12 от зажима («перекоса»), образовавшегося при натяжении первой тяги 5. Освобождение технологического штыря 18 из отверстия 16 будет свидетельствовать о том, что отверстия 16 в двуплечих рычагах 4 и 7 полностью совместились, и, следовательно, оси С и Д перпендикулярны плоскости Е, что будет соответствовать равному натяжению тяг 5. Далее, на полностью собранную тягу 5 устанавливают предварительно оттарированный на полном аналоге натягиваемой тяги (технологической тяге) съемный элемент 10 с закрепленными на нем тензодатчиками 11, предварительно закрепляя его с помощью зажимов. Вращая талреп 9, поднатягивают тягу до момента появления сигналов с тензодатчиков 11, выбирают провис тяги (см. выше), после чего полностью ослабляют зажимы и вновь закрепляют съемный элемент уже с усилием, предотвращающим в заданном диапазоне измерения проскальзывание поджатых друг к другу тяги 5 и съемного элемента 10 (определяется эмпирически при первых измерениях или используют более сложные зажимы). С этого момента съемный элемент 10 и тяга 5 работают на растяжение совместно как единый элемент тяги с увеличенной за счет съемного элемента площадью в поперечной сечении. Сила натяжения на этом участке будет такая же, как на любом другом участке тяги, но за счет увеличенной площади поперечного сечения напряжение будет меньше, а следовательно, и степень деформации также будет меньше. Кроме того, усилия в съемном элементе и работающей вместе с ним части тяги в силу одинаковой деформации будут пропорциональны их площадям в поперечном сечении. Таким образом, изменяя площадь поперечного сечения съемного элемента, не меняя при этом геометрических размеров самой тяги, можно изменить степень деформации и измеряемое усилие, а также равномерно распределить управляющий момент на тяге, и тем самым максимально полно совместить диапазон измерений с рабочим диапазоном используемых тензодатчиков (тензорезисторов), что автоматически повышает точность измерения и снижает трудоемкость изготовления и контроля.
Литература
1. Аналог - Г.Б.Иосилевич, Ю.В.Шарловский, «Затяжка и стопорение резьбовых соединений», издательство «Машиностроение», Москва, 1971 г., глава 1, стр.17, формула 23, стр.36-38, рис.36.
2. Прототип - С.Рузга, «Электрические тензометры сопротивления», изд-во «Мир», Москва, 1964 г., стр.325, 326, ст. «Силомер для измерения усилий в тросах»,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЗАДАННОГО УСИЛИЯ НАТЯЖЕНИЯ РЕГУЛИРУЕМОЙ МЕХАНИЧЕСКОЙ ТЯГИ | 2011 |
|
RU2484433C1 |
| СПОСОБ НАТЯЖЕНИЯ СПАРЕННЫХ ТЯГ | 2012 |
|
RU2509993C1 |
| СПОСОБ КОНТРОЛИРУЕМОЙ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 2003 |
|
RU2263290C2 |
| Складной стоечный поддон | 1990 |
|
SU1781140A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| УСТРОЙСТВО РАЗДЕЛЕНИЯ СТУПЕНЕЙ ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2014 |
|
RU2548261C1 |
| СПОСОБ КОНТРОЛЯ УСИЛИЯ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 2009 |
|
RU2401423C1 |
| УСТРОЙСТВО ПРИОТКРЫВАНИЯ КРЫШКИ ВХОДНОГО ЛЮКА | 2004 |
|
RU2268191C1 |
| УСТРОЙСТВО СТИБАЛИЗАЦИИ РАКЕТЫ | 2014 |
|
RU2568967C1 |
| Стенд для испытаний резьбовых соединений и настройки гайковертов | 1987 |
|
SU1421515A1 |



Изобретение относится к области измерительной техники, а именно к системам измерения усилий в стержнях, тягах и других протяженных элементах конструкций, и может быть использовано в любой отрасли народного хозяйства, и, в частности, в ракетной технике. Устройство работает следующим образом. В двуплечих рычагах делаются отверстия таким образом, чтобы центры отверстий и оси вращения лежали в одной плоскости. Аналогично выполняются ответные отверстия в основании. Систему тяг в «расслабленном» состоянии устанавливают на основание. В совмещенные отверстия на двуплечих рычагах вставляют технологические штыри. После чего одну из тяг при помощи талрепа натягивают до необходимого состояния. Натяжение одной тяги приводит к перекосу системы и зажатию одного из технологических штырей в отверстии. Далее при помощи талрепа начинаем натягивать вторую тягу до полного освобождения штыря от зажима («перекоса»), образовавшегося при натяжении первой тяги. Освобождение другого технологического штыря из отверстия будет свидетельствовать о том, что отверстия в двуплечих рычагах полностью совместились. Далее, на полностью собранную тягу устанавливают предварительно оттарированный съемный элемент с закрепленными на нем тензодатчиками, предварительно закрепляя его с помощью зажимов. Вращая талреп, поднатягивают тягу до момента появления сигналов с тензодатчиков, выбирают провис тяги. После чего полностью ослабляют зажимы и вновь закрепляют съемный элемент уже с усилием, предотвращающим проскальзывание поджатых друг к другу тяги и съемного элемента. С этого момента съемный элемент и тяга работают на растяжение совместно как единый элемент тяги. Таким образом, изменяя площадь поперечного сечения съемного элемента, не меняя при этом геометрических размеров самой тяги, можно изменить степень деформации и измеряемое усилие, а также равномерно распределить управляющий момент на тяге, и тем самым максимально совместить диапазон измерений с рабочим диапазоном используемых тензодатчиков, что автоматически повышает точность измерения и снижает трудоемкость изготовления и контроля. 6 ил.
Устройство для обеспечения заданного усилия натяжения спаренных тяг, состоящее из тензодатчиков и автономного устройства декодирования сигналов с тензодатчиков, отличающееся тем, что тензодатчики закреплены на съемном технологическом элементе с площадью поперечного сечения, обеспечивающей наиболее полное использование функциональных возможностей тензодатчиков, причем технологический элемент закреплен на тяге в двух разнесенных по ее длине точках быстросъемными зажимами, обеспечивающими усилия поджатия, без скольжения прижатых концов съемного элемента относительно тяги, а рычаги, к которым подсоединены тяги, зафиксированы штырями.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ | 2005 |
|
RU2283483C1 |
| Способ определения максимального сопротивления резины разрыву | 1950 |
|
SU88145A1 |
| Измеритель натяжения | 1959 |
|
SU130698A1 |
| US 2009145238 А1, 11.06.2009 | |||

