Изобретение относится к области судостроения, а именно оборудования для якорной установки судов.
Известны способ и устройство удержания спасательного судна (СС) в месте выполнения подводных спасательных работ над аварийной подводной лодкой (ПЛ) с помощью системы динамического позиционирования [1].
Недостатком способа является необходимость непрерывной работы системы в течение времени выполнения работ, что требует расхода топлива и ресурса подруливающих устройств.
Известны способ и устройство удержания судна на 3-х или на 4-х судовых якорях [2].
Недостатком способа является сложность и трудоемкость постановки судна на якоря, а также ограниченная держащая сила якорей, что в условиях ветра и волнения снижает надежность удержания судна.
Известен способ удержания судна на рейдовом оборудовании [3].
Недостатком способа является необходимость привлечения килекторного судна для постановки рейдовых бочек, длительность операции по установке судна на бочки, возможность срыва бочек в штормовых условиях.
Известны способ и устройство удержания судна на мертвых якорях, основанный на возможности перемещения точек закрепления якорных канатов на судне с помощью подвижных тележек, что позволяет разворачивать судно носом на ветер и волнение при изменении направления их действия [4] (прототип).
Недостатком способа является длительность, работ по установке мертвых якорей, что не позволяет его использовать в практике аварийно-спасательных работ.
Задачей изобретения является разработка способа и конструкции устройства для удержания судна над аварийной пл более надежного, чем при стоянке на мертвых якорях, повышение оперативности выполнения работ.
Для решения задачи предлагается способ удержания спасательного судна над аварийной ПЛ, при котором в качестве мертвых якорей применяют корпус аварийной ПЛ, лежащей на грунте. Для закрепления канатов используют установленные на ПЛ штоковые устройства (ШУ). За ролик ШУ с судна заводят направляющий канат автоматической следящей лебедки, по которому опускают захват, за проушины которого, закрепляют грузовой синтетический канат транзитной лебедки с накопительной вьюшкой, до автоматической стыковки с ШУ, после чего транзитную лебедку включают в автоматический режим поддержания заданного натяжения каната.
Для реализации указанного способа предлагается устройство, содержащее подъемные штоки на корпусе пл, автоматические захваты, автоматические следящие лебедки, направляющий канат, автоматические транзитные лебедки, накопительные вьюшки и синтетические канаты.
Существенным отличием от прототипа является способ удержания СС над аварийной пл, при котором в качестве мертвых якорей применяют корпус аварийной пл со штоковыми устройствами в оконечностях, а также конструкция устройства, обеспечивающая заведение за ролик ШУ направляющего каната автоматической следящей лебедки, перемещение по направляющему канату автоматического захвата с помощью грузового синтетического каната транзитной лебедки с накопительной вьюшкой и его автоматическое соединение с ШУ пл.
Полезность отличительных признаков состоит в том, что способ удержания и конструкция устройства обеспечивают по сравнению с прототипом:
- упрощение технологии постановки СС над аварийной пл;
- уменьшение времени постановки и снятия с якоря;
- повышение держащей силы якоря.
Сущность изобретения поясняется фиг.1-3.
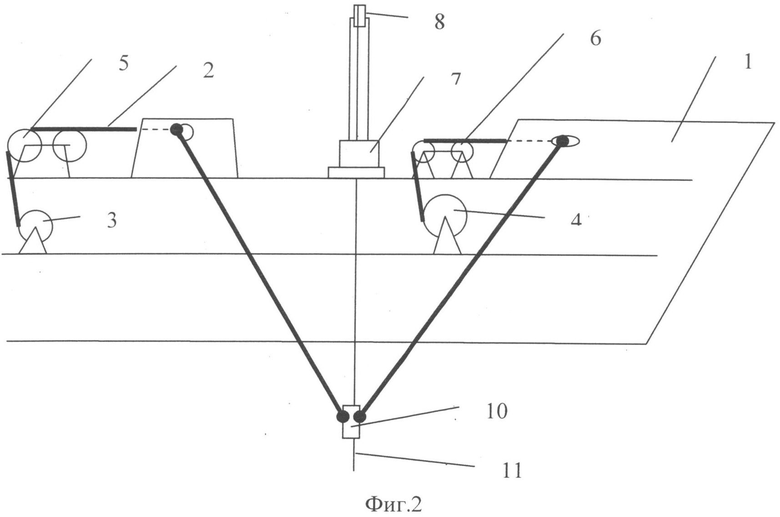
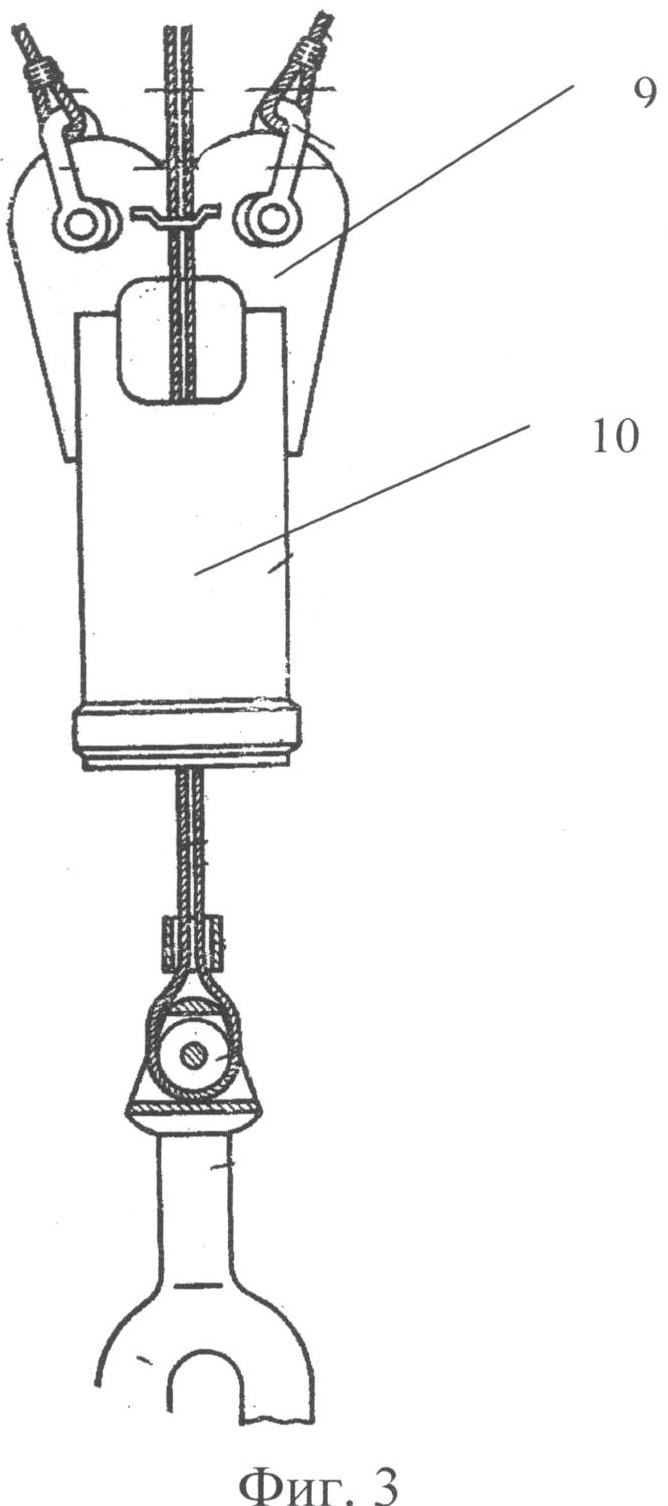
Для осуществления способа в носовой оконечности судна на верхней палубе (ВП) побортно устанавливаются транзитные лебедки 5 (л.б.) и 6 (п.б.) и автоматическая следящая лебедка 7 с ролом 8 направляющего каната 10, а на нижней палубе - накопительные вьюшки 3 и 4 (фиг.2). Подобные механизмы устанавливают побортно и в кормовой оконечности. Для соединения синтетических канатов 2 с ШУ пл предусмотрены автоматические захваты 10 с проушинами 9. Схема соединения автоматического захвата с ШУ приведена на рисунке (фиг.3).
Устройство используется следующим образом.
Для постановки и удержания судна над аварийной пл на судне 1 (фиг.1) синтетические канаты 2 накопительных вьюшек 3, 4, укладывают на барабаны автоматических транзитных лебедок 5 и 6 (фиг.2). С барабанов лебедок 5, 6 канаты 2 пропускают через бортовые клюзы 8 и через борт возвращают на ВП (показано пунктиром), где их ходовые концы закрепляют в проушинах 9 автоматического захвата 10 (фиг.3). Через корпус захвата 10 пропускают направляющий канат 11 автоматической следящей лебедки 7 по ролу 8. Судно 1 удерживают над аварийной пл 12 с помощью средств активного управления (САУ) 14 (фиг.1). Захват 10 опускают за борт. Аналогичные действия выполняют в кормовой оконечности СС. С судна 1 спускают водолазный колокол (ВК). С помощью водолаза ходовой конец направляющего каната 11 заводят за ролик 15 ШУ 16 (фиг.3), после чего включают в режим слежения за натяжением направляющего каната автоматическую следящую лебедку. Травлением лебедок 5 и 6 по направляющему канату 11 опускают захват 10 до автоматической стыковки с ШУ 16. Подобные действия выполняют в кормовой оконечности. Водолаза возвращают в ВК 13. При необходимости ВК 13 поднимают на борт. Судно устанавливают носом к ветру и течению с помощью САУ 14 и транзитных лебедок, после чего САУ 14 останавливают, а транзитные лебедки включают в автоматический режим удержания судна 1 с заданным усилием натяжения канатов 2 для выполнения спасательных работ.
После выполнения спасательных работ захваты 10 отдаются водолазом и устройство приводится в исходное положение.
Источники информации
1. Лебедев Э.П. и др. Средства активного управления судами. Л. «Судостроение», 1969.
2. Кульмач П.П. Якорные системы удержания плавучих объектов. - Л. «Судостроение», 1980.
3. Казменко В.Д. Морская практика для инженера-судоводителя. «Морской транспорт», М. - 1962 г., стр.30-43.
4. Бошен Генри С. Способ и устройство для постановки буровых судов на мертвые якоря (Boschen Henry С., Jr. Method and apparatus for mooring floating vessel.), Патент США, кл. 114-206 R. (B63b 21/50 №3822663), 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА СПАСАТЕЛЬНАЯ ВСПЛЫВАЮЩАЯ | 2011 |
|
RU2479463C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭВАКУАЦИИ ЭКИПАЖА АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ ИЗ ВСПЛЫВШЕЙ СПАСАТЕЛЬНОЙ КАМЕРЫ | 2014 |
|
RU2557684C1 |
| Способ эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры и устройство для его осуществления | 2020 |
|
RU2756949C1 |
| Спуско-подъемное устройство | 2018 |
|
RU2735444C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| СУДНО СНАБЖЕНИЯ ПОДВОДНОЙ НЕФТЕДОБЫВАЮЩЕЙ ПЛАТФОРМЫ | 2012 |
|
RU2498923C2 |
| СПАСАТЕЛЬНАЯ ПОДВОДНАЯ ЛОДКА | 2022 |
|
RU2789096C1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| СПОСОБ СПАСАНИЯ ПОДВОДНИКОВ ИЗ ОТСЕКОВ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2797933C1 |
Изобретение относится к области судоподъема а именно, к оборудованию для якорной установки судов. Способ удержания спасательного судна над аварийной подводной лодкой основан на использовании держащей силы мертвых якорей, за которые закрепляют грузонесущие связи грузовых механизмов судна. В качестве мертвых якорей используют корпус аварийной подводной лодки со штоковыми устройствами в оконечностях. Синтетические канаты накопительных вьюшек правого и левого борта судна укладывают на барабаны автоматических транзитных лебедок, пропускают через бортовые клюзы, закрепляют в проушинах автоматического захвата. Пропускают через корпус захвата направляющий канат автоматической следящей лебедки, опускают захват за борт. Заводят коренной конец направляющего каната за ролик штока аварийной подводной лодки, включают лебедку в режим слежения за натяжением направляющего каната. Опускают захват по направляющему канату до автоматической стыковки со штоком и включают транзитную лебедку в автоматический режим удержания над аварийной подводной лодкой с заданным усилием натяжения. Устройство содержит мертвые якоря, грузонесущие связи и грузовые механизмы. В качестве мертвых якорей используется корпус аварийной подводной лодки со штоковыми устройствами в оконечностях, для стыковки с которыми предусмотрены автоматические захваты, автоматические следящие лебедки с направляющим канатом, автоматические транзитные лебедки и направляющие вьюшки с синтетическими якорными канатами. Упрощается возможность удержания спасательного судна над аварийной подводной лодкой при стоянке на якорях и уменьшается время постановки на якорь. 2 н.п. ф-лы, 3 ил.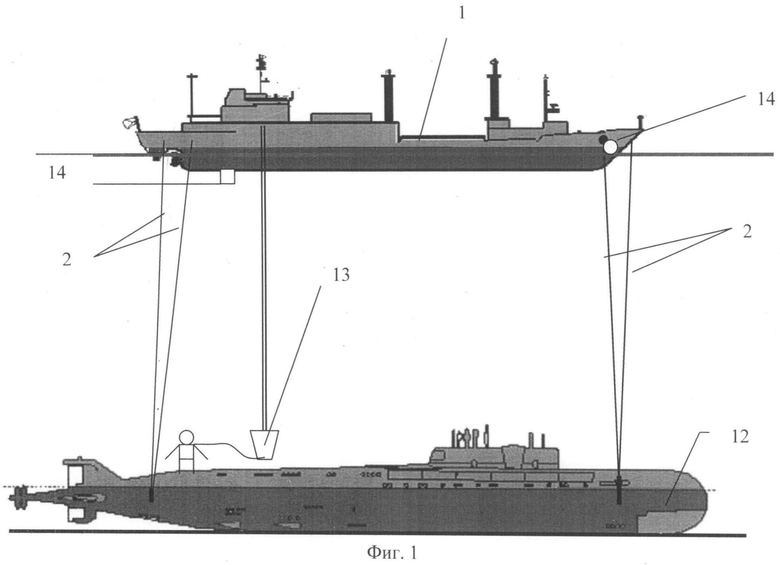
1. Способ удержания спасательного судна над аварийной подводной лодкой, основанный на использовании держащей силы мертвых якорей, за которые закрепляют грузонесущие связи грузовых механизмов судна, отличающийся тем, что в качестве мертвых якорей используют корпус аварийной подводной лодки со штоковыми устройствами в оконечностях, при этом синтетические канаты накопительных вьюшек правого и левого борта судна укладывают на барабаны автоматических транзитных лебедок, пропускают через бортовые клюзы, закрепляют в проушинах автоматического захвата, пропускают через корпус захвата направляющий канат автоматической следящей лебедки, опускают захват за борт, заводят коренной конец направляющего каната за ролик штока аварийной подводной лодки, включают лебедку в режим слежения за натяжением направляющего каната, опускают захват по направляющему канату до автоматической стыковки со штоком и включают транзитную лебедку в автоматический режим удержания над аварийной подводной лодкой с заданным усилием натяжения.
2. Устройство для удержания спасательного судна над аварийной подводной лодкой, содержащее мертвые якоря, грузонесущие связи и грузовые механизмы, отличающееся тем, что в качестве мертвых якорей используется корпус аварийной подводной лодки со штоковыми устройствами в оконечностях, для стыковки с которыми предусмотрены автоматические захваты, автоматические следящие лебедки с направляющим канатом, автоматические транзитные лебедки и направляющие вьюшки с синтетическими якорными канатами.
| US 3822663 A, 09.07.1974 | |||
| CN 101879937 A, 10.11.2010 | |||
| СПОСОБ ПОДЪЁМА ПОДВОДНЫХ ЛОДОК | 2001 |
|
RU2228281C2 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ ЗАХВАТА И ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2000 |
|
RU2176966C2 |

