Изобретение относится к радиолокационным системам отображения данных, а именно к системам и способам трехмерной визуализации яркостной радиолокационной карты местности, и может применяться в охранных радиолокационных системах для повышения детализации и, как следствие, информативности представления данных в охранных системах.
Широко известны системы двумерной визуализации радиолокационной информации, к которым относятся системы, отображающие двумерную яркостную радиолокационную карту с наложенной на нее целевой обстановкой. Визуализацию с разным уровнем детализации радиолокационной информации применяют в разных по назначению системах (системы обзора воздушного пространства или земной поверхности, бортовые системы). Основная функцией подобных систем - это отображение динамики целевой/яркостной обстановки окружающей среды.
Известен (патент РФ №2290663) способ трехмерной визуализации яркостной радиолокационной карты местности, заключающийся в создании режима повышенного разрешения, позволяющего сформировать матрицу A(i, j) двумерного радиолокационного изображения в виде совокупности амплитуд отраженного сигнала, зафиксированных в i-x пикселях по дальности и j-x синтезированных пикселях по азимуту (доплеровской частоте), отличающийся тем, что для каждого i, j-го элемента матрицы изображения поверхности, создающего радиолокационную тень, дополнительно с амплитудой сигнала отражения A(i, j) по длине тени измеряют высоту Н, значение которой присваивают другим элементам матрицы и тем самым формируют матрицу высот H(i, j).
В патентной заявке США №2009167595 описывают систему трехмерной визуализации яркостной радиолокационной карты местности, в которой строят радиолокационную карту рельефа местности по отраженному сигналу РЛС (радиолокационной станции), содержащему данные об азимуте, угле места и дальности относительно положения самолета, на котором установлена РЛС.
Недостатки описанных выше аналогов предложенного изобретения заключаются в том, что в них не используют уровень мощности отраженного радиолокационного сигнала и псевдоцвет для трехмерной цветной визуализации яркостной радиолокационной карты местности, вследствие чего степень визуализации, а именно детализации радиолокационной информации, не достаточно высока.
Наиболее близкими к предложенному изобретению являются система и способ трехмерной визуализации яркостной радиолокационной карты местности, изложенные в патенте США №6212132, в которых определяют азимут, дальность и мощность отраженного радиолокационного сигнала в двумерной полярной системе координат, после чего формируют трехмерную яркостную радиолокационную карту местности на основе полигонов. Данные система и способ выбраны в качестве прототипов предложенного изобретения.
Недостаток системы и способа прототипов заключается в том, что в них термин «трехмерное» используют условно для обозначения двумерного изображения, построенного на основе горизонтальных координат (X, Y) и яркостной координаты В без определения вертикальной координаты Н («высотной» компоненты) на основе уровня мощности радиолокационного сигнала, вследствие чего степень визуализации, а именно детализации радиолокационной информации, не достаточно высока.
Задачей заявленного изобретения является создание системы и способа трехмерной визуализации яркостной радиолокационной карты местности с улучшенной визуализацией, а именно, с увеличенной степенью детализации радиолокационной информации за счет визуального трехмерного отображения уровня мощности радиолокационного сигнала, отраженного как подстилающей поверхностью, так и объектами, расположенными на ней, и с расширенным динамическим диапазоном за счет дополнительного использования псевдоцвета для визуального цветного отображения уровня мощности радиолокационного сигнала.
Таким образом, решение задачи трехмерной визуализации яркостной радиолокационной карты местности основано на использовании энергетической характеристики (мощности) радиолокационных эхо-сигналов, отраженных от земной поверхности, для преобразования данных об азимуте, дальности и мощности A, R, P в трехмерную ортогональную систему координат (X, Y, Z), при этом энергетическая характеристика (мощность) отраженной поверхности Р преобразуют в вертикальную координату ("высотную" компоненту) трехмерной системы координат. Кроме того, для отображения радиолокационной информации вводят псевдоцвет. Формируемое в итоге трехмерное изображение яркостной радиолокационной карты местности отображает энергетические характеристики земной поверхности и не соответствует рельефу местности.
Поставленная задача решена путем создания системы трехмерной визуализации яркостной радиолокационной карты местности, содержащей радиолокационную антенну, соединенную с блоком формирования исходной яркостной радиолокационной карты местности, отличающейся тем, что дополнительно содержит блок преобразования в ортогональную систему координат, вход которого соединен с выходом блока формирования исходной радиолокационной карты местности, а выход которого соединен со входом блока преобразования цветовой модели и со входом блока вычисления яркостной вертикальной координаты ("высотной" компоненты), выходы которых соединены со входом блока формирования итоговой трехмерной яркостной радиолокационной карты местности, выход которого связан со входом устройства отображения, при этом для каждого пикселя исходной двумерной яркостной радиолокационной карты местности:
- блок формирования исходной двумерной яркостной радиолокационной карты местности выполнен с возможностью определения азимута, дальности и мощности отраженного радиолокационного сигнала в двумерной полярной системе координат, при этом формирования исходной двумерной яркостной радиолокационной карты местности;
- блок преобразования в ортогональную систему координат выполнен с возможностью преобразования данных текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), где где A - азимут, R - дальность, P - мощность отраженного сигнала текущего пикселя на исходной двумерной яркостной радиолокационной карте местности, а (x, y) - горизонтальные координаты текущего пикселя на итоговой трехмерной радиолокационной карте местности с однозначным преобразованием (A, R) в (x, y), YUV-цветовая модель текущего пикселя, где цвет представлен в виде трех компонент (Y - ярость, U и V - две разностные компоненты цветопередачи);
- блок преобразования цветовой модели выполнен с возможностью преобразования цветовой модели текущего пикселя из YUV-цветовой модели в RGB-цветовую модель за счет наложения псевдоцвета с использованием заранее сформированной цветовой палитры, использующей RGB-цветовую модель, где R, G, B - интенсивности соответственно красного, зеленого и синего цветов;
- блок вычисления яркостной вертикальной координаты выполнен с возможностью вычисления яркостной вертикальной координаты Н текущего пикселя на итоговой трехмерной радиолокационной карте местности за счет использования Y-компоненты YUV-цветовой модели;
- блок формирования итоговой трехмерной яркостной радиолокационной карты местности выполнен с возможностью вывода текущего пикселя, в соответствии с его данными в ортогональной трехмерной системе координат (x, y, H, R, G, B), на устройство отображения, при этом формирования итоговой трехмерной радиолокационной карты местности.
В предпочтительном варианте осуществления системы трехмерной визуализации яркостной радиолокационной карты местности блок преобразования в ортогональную систему координат выполнен с возможностью преобразования данных текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), при этом:
нормирования мощности отраженного сигнала на секторе сканирования радиолокационной станции путем однозначного преобразования [0, Pmax]->[0,1]: Pн=P/Pmax, где Pmax - максимальное значение радиолокационного сигнала на секторе сканирования;
- приведения нормированной мощности к динамическому диапазону цветовой модели YUV: С-kPн, где k=224-1;
- формирования компоненты YUV: Y=(C>>16), U=(C>>8), V=C.
В предпочтительном варианте осуществления системы трехмерной визуализации яркостной радиолокационной карты местности блок преобразования цветовой модели выполнен с возможностью преобразования цветовой модели текущего пикселя из YUV-цветовой модели в RGB-цветовую модель, при этом: R=Y+1.13983V; G=Y-0.39465U-0.58060V; B=Y+2.03211U.
В предпочтительном варианте осуществления система трехмерной визуализации яркостной радиолокационной карты местности дополнительно содержит блок совмещения, вход которого связан с выходом блока формирования итоговой трехмерной яркостной радиолокационной карты местности, а выход которого связан со входом устройства отображения, выполненный с возможностью вывода на устройство отображения топографической карты местности, соответствующей итоговой трехмерной радиолокационной карте местности.
В предпочтительном варианте осуществления система трехмерной визуализации яркостной радиолокационной карты местности выполнена с возможностью вывода на устройство отображения топографической карты местности, полупрозрачной по сравнению с итоговой трехмерной радиолокационной картой местности.
Поставленная задача решена также путем создания способа трехмерной визуализации яркостной радиолокационной карты местности, в котором
определяют с помощью блока формирования исходной двумерной яркостной радиолокационной карты местности азимут, дальность и мощность отраженного радиолокационного сигнала в двумерной полярной системе координат, при этом формируют исходную двумерную яркостную радиолокационную карту местности; отличающегося тем, что для каждого пикселя исходной двумерной яркостной радиолокационной карты местности выполняют следующие операции:
а) преобразовывают с помощью блока преобразования в ортогональную систему координат данные текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), где где A - азимут, R - дальность, P - мощность отраженного сигнала текущего пикселя на исходной двумерной яркостной радиолокационной карте местности, а (x, y) - горизонтальные координаты текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности с однозначным преобразованием (А, R) в (x, y), YUV-цветовая модель текущего пикселя, где цвет представлен в виде трех компонент (Y - ярость, U и V - две разностные компоненты цветопередачи);
b) преобразовывают с помощью блока преобразования цветовой модели цветовую модель текущего пикселя из YUV-цветовой модели в RGB-цветовую модель за счет наложения псевдоцвета с использованием заранее сформированной цветовой палитры, использующей RGB-цветовую модель, где R, G, В - интенсивности соответственно красного, зеленого и синего цветов;
c) вычисляют с помощью блока вычисления яркостной вертикальной координаты яркостную вертикальную координату Н текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности за счет использования Y-компоненты YUV-цветовой модели;
d) выводят с помощью блока формирования итоговой трехмерной яркостной радиолокационной карты местности текущий пиксель, в соответствии с его данными в ортогональной трехмерной системе координат (x, y, H, R, G, B), на устройство отображения, при этом формируют итоговую трехмерную яркостную радиолокационную карту местности.
В предпочтительном варианте осуществления способа трехмерной визуализации яркостной радиолокационной карты местности выполняют операцию а), при этом:
нормируют мощность отраженного сигнала на секторе сканирования радиолокационной станции путем однозначного преобразования [0, Pmax]->[0,1]: Pн=P/Pmax, где Pmax - максимальное значение радиолокационного сигнала на секторе сканирования;
- приводят нормированную мощность к динамическому диапазону цветовой модели YUV: C=kPн, где k=224-1;
- формируют компоненты YUV: Y=(C>>16), U=(C>>8), V=C.
В предпочтительном варианте осуществления способа трехмерной визуализации яркостной радиолокационной карты местности выполняют операцию а), при этом полагают: R=Y+1.13983V; G=Y-0.39465U-0.58060V; B=Y+2.03211U.
В предпочтительном варианте осуществления способа трехмерной визуализации яркостной радиолокационной карты местности дополнительно выводят с помощью блока совмещения на устройство отображения топографическую карту местности, соответствующую итоговой трехмерной яркостной радиолокационной карте местности.
В предпочтительном варианте осуществления способа трехмерной визуализации яркостной радиолокационной карты местности выводят на устройство отображения топографическую карту местности, полупрозрачную по сравнению с итоговой трехмерной яркостной радиолокационной картой местности.
Для лучшего понимания предложенной полезной модели далее приводится его подробное описание с соответствующими чертежами.
Фиг.1. Общая функциональная схема системы трехмерной визуализации яркостной радиолокационной карты местности согласно изобретению.
Фиг.2. Блок-схема способа трехмерной визуализации яркостной радиолокационной карты местности согласно изобретению.
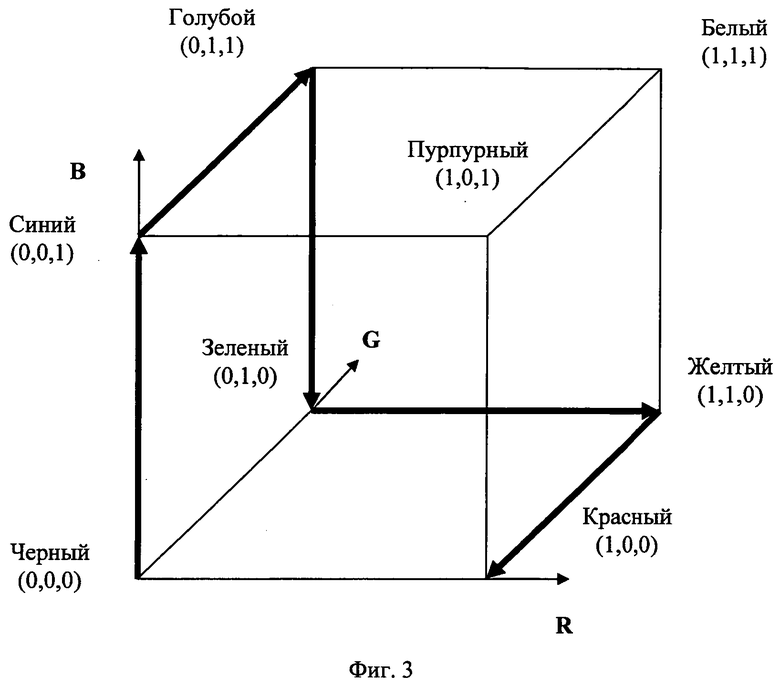
Фиг.3. Схема преобразования цветовой модели в системе и способе трехмерной визуализации яркостной радиолокационной карты местности согласно изобретению.
Фиг.4. Схема представления пикселя в итоговой трехмерной яркостной радиолокационной карте местности согласно изобретению.
Фиг.5. Пример итоговой трехмерной яркостной радиолокационной карты местности, сформированной на устройстве отображения одновременно с топографической картой местности согласно изобретению.
Рассмотрим вариант выполнения предложенных системы и способа трехмерной визуализации яркостной радиолокационной карты местности (Фиг.1-5). Сначала определяют с помощью блока 1 формирования исходной двумерной яркостной радиолокационной карты местности азимут, дальность и мощность отраженного радиолокационного сигнала в двумерной полярной системе координат, при этом формируют исходную двумерную яркостную радиолокационную карту местности (шаг 1).
Для каждого пикселя исходной двумерной яркостной радиолокационной карты местности выполняют следующие операции. Преобразовывают с помощью блока 2 преобразования в ортогональную систему координат данные текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V) (шаг 2), где A - азимут, R - дальность, P - мощность отраженного сигнала текущего пикселя на исходной двумерной радиолокационной карте местности, а (x, y) - горизонтальные координаты текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности с однозначным преобразованием (A, R) в (x, y), YUV -цветовая модель текущего пикселя, где цвет представлен в виде трех компонент (Y - ярость, U и V - две разностные компоненты цветопередачи). При этом на шаге 2: нормируют мощность отраженного сигнала на секторе сканирования радиолокационной станции путем однозначного преобразования [0, Pmax]->[0,1]: Pн=P/Pmax, где Pmax - максимальное значение радиолокационного сигнала на секторе сканирования; приводят нормированную мощность к динамическому диапазону цветовой модели YUV: C=kPн, где k=224-1; формируют компоненты YUV: Y=(C>>16), U=(C>>8), V=C.
Преобразовывают с помощью блока 3 преобразования цветовой модели цветовую модель текущего пикселя из YUV-цветовой модели в RGB-цветовую модель за счет наложения псевдоцвета с использованием заранее сформированной искусственной цветовой палитры (Фиг.3), использующей RGB-цветовую модель, где R, G, B - интенсивности соответственно красного, зеленого и синего цветов (шаг 3), при этом полагают: R=Y+1.13983V; G=Y-0.39465U-0.58060V; B=Y+2.03211U. Причем, чем меньше мощность отраженного радиолокационного сигнала, тем цвет пикселя радиолокационной карты будет стремиться к черному RGB черный = {0,0,0}. Самые яркие радиолокационные объекты будут отображаться красным цветом RGB красный = {1,0,0}.
Вычисляют с помощью блока 4 вычисления яркостной вертикальной координаты яркостную вертикальную координату Н текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности за счет использования Y-компоненты YUV-цветовой модели (шаг 4). Выводят с помощью блока 5 формирования итоговой трехмерной яркостной радиолокационной карты местности текущий пиксель, в соответствии с его данными в ортогональной трехмерной системе координат (x, y, H, R, G, B) (Фиг.4), на устройство отображения 6 одновременно с топографической картой местности, при этом формируют итоговую трехмерную яркостную радиолокационную карту местности (шаг 5) (Фиг.5).
Предпочтительно, чтобы предложенные система и способ трехмерной визуализации яркостной радиолокационной карты местности были реализованы на программируемом графическом процессоре, который может производить дополнительную обработку графических данных, включая рендеринг графического конвейера технологии OpenGL и DirectX на аппаратном уровне.
Хотя описанный выше вариант выполнения предложенного изобретения был изложен с целью иллюстрации предложенного изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла предложенного изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЕРАРХИЧЕСКОЕ ОСНОВАННОЕ НА ИЗОБРАЖЕНИЯХ ПРЕДСТАВЛЕНИЕ НЕПОДВИЖНОГО И АНИМИРОВАННОГО ТРЕХМЕРНОГО ОБЪЕКТА, СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ ЭТОГО ПРЕДСТАВЛЕНИЯ ДЛЯ ВИЗУАЛИЗАЦИИ ОБЪЕКТА | 2001 |
|
RU2215326C2 |
| Устройство разноракурсного многопозиционного синтезирования комплексного изображения земной поверхности | 2020 |
|
RU2756904C1 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЦИФРОВОГО ФОТОИЗОБРАЖЕНИЯ | 2006 |
|
RU2400815C2 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ И КОПИРОВАНИЯ | 2004 |
|
RU2368091C2 |
| ОБРАБОТКА ДАННЫХ ДЛЯ СВЕРХРАЗРЕШЕНИЯ | 2017 |
|
RU2652722C1 |
| УСТРОЙСТВО КОЛОРИЗАЦИИ ЧЕРНО-БЕЛЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2524869C1 |
| Система для построения модели трехмерного пространства | 2023 |
|
RU2812950C1 |
| Устройство формирования комплексного изображения на основе совмещения отдельных разнородных изображений с цифровой картой местности | 2022 |
|
RU2789857C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ НАСАДКА НА СМАРТФОН ДЛЯ ОПРЕДЕЛЕНИЯ ЧИСТОТЫ, ВЛАЖНОСТИ И ФОТОВОЗРАСТА КОЖИ | 2016 |
|
RU2657377C2 |
| СПОСОБ МИКРОСКОПИЧЕСКОГО ИССЛЕДОВАНИЯ ОБРАЗЦА, СОДЕРЖАЩЕГО МИКРООБЪЕКТЫ С РАЗНОРОДНЫМИ ЗОНАМИ | 2006 |
|
RU2308745C1 |



Изобретение относится к радиолокационным системам отображения данных, а именно к системам и способам трехмерной визуализации яркостной радиолокационной карты местности, и может применяться в охранных радиолокационных системах. Достигаемый технический результат - улучшение визуализации, а именно увеличение степени детализации радиолокационной информации. Указанный результат достигается за счет визуального трехмерного отображения уровня мощности радиолокационного сигнала, отраженного как подстилающей поверхностью, так и объектами, расположенными на ней, и расширение динамического диапазона за счет дополнительного использования псевдоцвета для визуального цветного отображения уровня мощности радиолокационного сигнала. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Система трехмерной визуализации яркостной радиолокационной карты местности, содержащая радиолокационную антенну, соединенную с блоком формирования исходной яркостной радиолокационной карты местности, отличающаяся тем, что дополнительно содержит блок преобразования в ортогональную систему координат, вход которого соединен с выходом блока формирования исходной радиолокационной карты местности, а выход которого соединен со входом блока преобразования цветовой модели и со входом блока вычисления яркостной вертикальной координаты ("высотной" компоненты), выходы которых соединены со входом блока формирования итоговой трехмерной яркостной радиолокационной карты местности, выход которого связан со входом устройства отображения, при этом для каждого пикселя исходной двумерной яркостной радиолокационной карты местности:
- блок формирования исходной двумерной яркостной радиолокационной карты местности выполнен с возможностью определения азимута, дальности и мощности отраженного радиолокационного сигнала в двумерной полярной системе координат, при этом формирования исходной двумерной яркостной радиолокационной карты местности;
- блок преобразования в ортогональную систему координат выполнен с возможностью преобразования данных текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), где где A - азимут, R - дальность, P - мощность отраженного сигнала текущего пикселя на исходной двумерной радиолокационной карте местности, а (x, y) - горизонтальные координаты текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности с однозначным преобразованием (A, R) в (x, y), YUV - цветовая модель текущего пикселя, где цвет представлен в виде трех компонент (Y - ярость, U и V - две разностные компоненты цветопередачи);
- блок преобразования цветовой модели выполнен с возможностью преобразования цветовой модели текущего пикселя из YUV-цветовой модели в RGB-цветовую модель за счет наложения псевдоцвета с использованием заранее сформированной цветовой палитры, использующей RGB-цветовую модель, где R, G, B - интенсивности соответственно красного, зеленого и синего цветов;
- блок вычисления яркостной вертикальной координаты выполнен с возможностью вычисления яркостной вертикальной координаты Н текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности за счет использования Y-компоненты YUV-цветовой модели;
- блок формирования итоговой трехмерной яркостной радиолокационной карты местности выполнен с возможностью вывода текущего пикселя, в соответствии с его данными в ортогональной трехмерной системе координат (x, y, H, R, G, B), на устройство отображения, при этом формирования итоговой трехмерной яркостной радиолокационной карты местности.
2. Система трехмерной визуализации яркостной радиолокационной карты местности по п.1, отличающаяся тем, что блок преобразования в ортогональную систему координат выполнен с возможностью преобразования данных текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), при этом:
- нормирования мощности отраженного сигнала на секторе сканирования радиолокационной станции путем однозначного преобразования [0, Pmax]->[0,1]: Pн=P/Pmax, где Pmax - максимальное значение радиолокационного сигнала на секторе сканирования;
- приведения нормированной мощности к динамическому диапазону цветовой модели YUV:
C=kPн, где k=224-1;
- формирования компоненты YUV: Y=(C>>16), U=(C>>8), V=C.
3. Система трехмерной визуализации яркостной радиолокационной карты местности по п.1, отличающаяся тем, что блок преобразования цветовой модели выполнен с возможностью преобразования цветовой модели текущего пикселя из YUV-цветовой модели в RGB-цветовую модель, при этом: R=Y+1.13983V; G=Y-0.39465U-0.58060V; B=Y+2.03211U.
4. Система трехмерной визуализации яркостной радиолокационной карты местности по п.1, отличающаяся тем, что дополнительно содержит блок совмещения, вход которого связан с выходом блока формирования итоговой трехмерной яркостной радиолокационной карты местности, а выход которого связан со входом устройства отображения, выполненный с возможностью вывода на устройство отображения топографической карты местности, соответствующей итоговой трехмерной яркостной радиолокационной карте местности.
5. Система трехмерной визуализации яркостной радиолокационной карты местности по п.4, отличающаяся тем, что выполнена с возможностью вывода на устройство отображения топографической карты местности, полупрозрачной по сравнению с итоговой трехмерной яркостной радиолокационной картой местности.
6. Способ трехмерной визуализации яркостной радиолокационной карты местности, в котором определяют с помощью блока формирования исходной двумерной яркостной радиолокационной карты местности азимут, дальность и мощность отраженного радиолокационного сигнала в двумерной полярной системе координат, при этом формируют исходную двумерную яркостную радиолокационную карту местности; отличающийся тем, что для каждого пикселя исходной двумерной яркостной радиолокационной карты местности выполняют следующие операции:
а) преобразовывают с помощью блока преобразования в ортогональную систему координат данные текущего пикселя на исходной яркостной радиолокационной карте местности из двумерной полярной системы координат (A, R, P) в двумерную ортогональную систему координат (x, y, Y, U, V), где где A - азимут, R - дальность, P - мощность отраженного сигнала текущего пикселя на исходной двумерной радиолокационной карте местности, а (x, y) - горизонтальные координаты текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности с однозначным преобразованием (A, R) в (x, y), YUV - цветовая модель текущего пикселя, где цвет представлен в виде трех компонент (Y - ярость, U и V - две разностные компоненты цветопередачи);
b) преобразовывают с помощью блока преобразования цветовой модели цветовую модель текущего пикселя из YUV-цветовой модели в RGB-цветовую модель за счет наложения псевдоцвета с использованием заранее сформированной цветовой палитры, использующей RGB-цветовую модель, где R, G, B - интенсивности соответственно красного, зеленого и синего цветов;
c) вычисляют с помощью блока вычисления яркостной вертикальной координаты яркостную вертикальную координату Н текущего пикселя на итоговой трехмерной яркостной радиолокационной карте местности за счет использования Y-компоненты YUV-цветовой модели;
d) выводят с помощью блока формирования итоговой трехмерной яркостной радиолокационной карты местности текущий пиксель, в соответствии с его данными в ортогональной трехмерной системе координат (x, y, H, R, G, B), на устройство отображения, при этом формируют итоговую трехмерную яркостную радиолокационную карту местности.
7. Способ трехмерной визуализации яркостной радиолокационной карты местности по п.6, отличающийся тем, что выполняют операцию а), при этом:
- нормируют мощность отраженного сигнала на секторе сканирования радиолокационной станции путем однозначного преобразования [0, Pmax]->[0,1]: Pн=P/Pmax; где Pmax - максимальное значение радиолокационного сигнала на секторе сканирования;
- приводят нормированную мощность к динамическому диапазону цветовой модели YUV:
С=kPн, где k=224-1;
- формируют компоненты YUV: Y=(C>>16), U=(C>>8), V=C.
8. Способ трехмерной визуализации яркостной радиолокационной карты местности по п.6, отличающийся тем, что выполняют операцию а), при этом полагают: R=Y+1.13983V; G=Y-0.39465U-0.58060V; B=Y+2.03211U.
9. Способ трехмерной визуализации яркостной радиолокационной карты местности по п.6, отличающийся тем, что дополнительно выводят с помощью блока совмещения на устройство отображения топографическую карту местности, соответствующую итоговой трехмерной яркостной радиолокационной карте местности.
10. Способ трехмерной визуализации яркостной радиолокационной карты местности по п.8, отличающийся тем, что выводят на устройство отображения топографическую карту местности, полупрозрачную по сравнению с итоговой трехмерной яркостной радиолокационной картой местности.
| US 6212132 B1, 03.04/2001 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В МИЛЛИМЕТРОВОМ И СУБМИЛЛИМЕТРОВОМ ДИАПАЗОНЕ ВОЛН (ВАРИАНТЫ) И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В МИЛЛИМЕТРОВОМ И СУБМИЛЛИМЕТРОВОМ ДИАПАЗОНЕ ВОЛН | 2001 |
|
RU2237267C2 |
| JP 8371612 A, 18.10.1996 | |||
| EP 1895472 A2, 05.03.2008 | |||
| US 5227800 A, 13.07.1993 | |||
| US 6563451 B1, 13.05.2003 | |||
| KR 957590B1, 13.05.2010 | |||

