Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой РЛС, работающей в режиме повышенного разрешения - синтезирования апертуры антенны за счет селекции по доплеровской частоте.
Указанный режим наблюдения используются в бортовых РЛС при боковом или переднебоковом обзоре поверхности. При этом образуется плоское радиолокационное изображение (РЛИ) поверхности в координатах дальность - доплеровская частота (или дальность - азимут), напоминающее двумерное оптическое изображение (Радиолокационные станции с цифровым синтезированием апертуры антенны / А.Н.Антипов, В.Т.Горяинов, А.Н.Кулин и др. Под ред. В.Т.Горяинова. - М.: Радио и связь, 1988. - 304 с.). Однако при таком способе получения РЛИ высота поверхности не определяется, что затрудняет идентификацию изображений объектов на поверхности при их распознавании. В связи с этим возникает необходимость получения трехмерных изображений поверхности, на которых отображается высота.
Наиболее близким по технической сущности является способ получения двумерного (плоского) РЛИ поверхности в режиме узкополосной доплеровской фильтрации (Кондратенков Г.С., Фролов А.Ю. Радиовидение в передней зоне обзора бортовой радиолокационной станции с синтезированной апертурой антенны / Радиотехника, 2004, №1. - С.47-49).
В соответствии с данным способом формируется матрица плоского изображения A(i,j), элементы которой представляют амплитуды сигналов отражения, измеренные в полярной системе координат i-x элементов разрешения дальности (линий постоянного уровня радиальной дальности) и j-x элементов разрешения доплеровской частоты (линий постоянного уровня доплеровского угла отклонения луча РЛС от вектора путевой скорости, который в частном случае переднего обзора в горизонтальной плоскости совпадает с азимутом). При выводе на экран плоское изображение A(i,j) обычно дается в прямоугольной сетке координат. Недостатком данного способа является то, что изображение A(i,j) не несет информации о высоте объектов на поверхности.
Вместе с тем такая информация существует и находится в самом изображении A(i,j). Особенностью получения радиолокационного изображения является наличие радиолокационной тени (РЛ-тени), если она существует, в виде значений амплитуды на уровне шумов аппаратуры для всех точек пространства, расположенных за данной отражающей точкой поверхности по лучу РЛС. Тень создает контрастность на удаленной от наблюдателя части границы (контура) РЛИ высотного объекта и несет в себе информацию о его высоте.
Технический результат направлен на получение трехмерного радиолокационного изображения поверхности путем дополнительного измерения высоты в точках (пикселах) изображения, граничащих с РЛ-тенью, и присвоения измеренных значений высоты другим точкам по определенному правилу.
Технический результат предлагаемого технического решения достигается тем, что способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС заключается в создании режима повышенного разрешения, позволяющего сформировать матрицу A(i,j) двумерного радиолокационного изображения в виде совокупности амплитуд отраженного сигнала, зафиксированных в i-x элементах разрешения дальности и j-x синтезированных элементах разрешения по азимуту или доплеровской частоте, отличающийся тем, что для каждого i,j-го элемента матрицы изображения поверхности, создающего РЛ-тень, дополнительно с амплитудой сигнала отражения A(i,j) по длине тени измеряют высоту И, значение которой присваивают другим элементам матрицы, и тем самым формируют матрицу высот H(i,j), после формирования матрицы амплитуд A(i,j) осуществляют ее пороговую обработку и сегментацию путем разделения матрицы A(i,j) на однородные по амплитуде непересекающиеся подобласти изображения с присвоением каждой такой подобласти своей метки, причем подобласти с амплитудой, лежащей ниже порогового значения шумов аппаратуры, соответствующей РЛ-тени, помечают нулевой меткой, затем для каждого столбца матрицы изображения определяют последовательности следующих подряд элементов с нулевой меткой и для каждой такой последовательности по формуле, указанной ниже, вычисляют высоту поверхности И, зависящую от количества нулей, далее эту высоту присваивают всем элементам сегмента, граничащего с нулевой последовательностью: H(i,j)=Н, и, если с данным сегментом граничит несколько нулевых последовательностей, то для всех точек сегмента или для одной его метки запоминают максимальную высоту, а для незаполненных элементов матрицы H(i,j) оставляют первоначально заданное нулевое значение высоты, тем самым формируют матрицу высот H(i,j).
Способ осуществляется следующим образом.
1. В режиме повышенного разрешения по азимуту формируют матрицу РЛИ поверхности A(i,j) в координатах i-x элементов разрешения дальности и j-x элементов разрешения по азимуту.
2. С помощью специальной пороговой обработки матрицы A(i,j) с несколькими порогами α1<α2<...<αk получают матрицу контрастностей K(i,j), где каждому i,j-му элементу присваивают метку соответствующего уровня амплитуды, причем для элементов с амплитудой на уровне шумов аппаратуры: A(i,j)<α1 присваивают метку K(i,j)=0 признака РЛ-тени.
3. С помощью алгоритма сегментации ненулевые элементы матрицы контрастностей K(i,j), которые имеют одинаковую метку и образуют связные непересекающиеся подмножества, объединяют в сегменты и помечают i,j-e элементы каждого сегмента соответствующей ненулевой меткой M(i,j), a нулевым элементам матрицы K(i,j) оставляют нулевую метку: M(i,j)=0, тем самым формируют матрицу меток M(i,j).
4. Для каждого j-го столбца матрицы M(i,j) просматривают i-e элементы, начиная с i=1, и выделяют последовательности следующих подряд элементов с нулевой меткой M(i0,j),M(i0+1,j),...,М(i0+n,j), затем первому ненулевому элементу М(i1,j),i1=i0+n+1, присваивают значение высоты H(i,j), вычисляемой исходя из пропорции по формуле:
где n - длина РЛ-тени в числе элементов нулевой последовательности; h - высота полета объекта носителя РЛС; m - расстояние между РЛС и начальной точкой i1 образования РЛ-тени в числе элементов разрешения по наклонной дальности.
5. Это же значение высоты H(i1,j) присваивают всем элементам сегмента с меткой М(i1,j), граничащего с данной нулевой последовательностью, или запоминают значение высоты для одной общей метки сегмента. Если с сегментом граничит несколько нулевых последовательностей, то для всех его элементов (или для метки сегмента) запоминают максимальное значение высоты.
6. Для остальных незаполненных элементов матрицы H(i,j), которым не было присвоено расчетное значение высоты, оставляют первоначально присвоенное нулевое значение H(i,j)=0.
7. Полученная таким образом матрица высот H(i,j) совместно с матрицей амплитуд A(i,j) представляет трехмерное изображение поверхности, которое далее передают на алгоритмы индикации для отображения на экране пилота, а также на алгоритмы распознавания изображений протяженных объектов на поверхности.
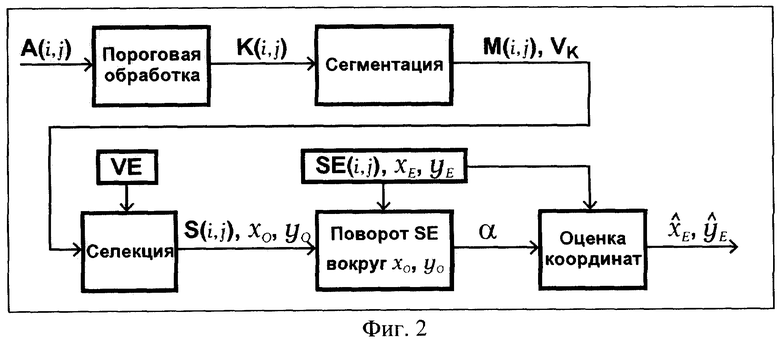
На фиг.1 иллюстрируется образование РЛ-тени при наблюдении объекта (сооружения) прямоугольной формы на фоне поверхности. Показаны матрицы РЛИ при различных положениях объекта по отношению к наблюдателю и образование РЛ-тени при этих положениях. На фиг.2 представлена блок-схема алгоритма распознавания изображения объекта на фоне поверхности, который сводится к следующему (Клочко В.К., Курилкин В.В., Шейнина И.В. Сравнительный анализ алгоритмов распознавания радиолокационных изображений объектов по данным бортовой РЛС // Радиотехника. 2003, №12. С.3-9).
1. Матрица РЛИ A(i,j) подается на вход блока адаптивной пороговой обработки с несколькими меняющимися порогами. В данном блоке каждый элемент матрицы A(i,j) сравнивается с k порогами a1,...,ak, а0=0, аk+1=∞, (k+1) - число уровней контрастности (например, k+1=3 или 5). Если aS-1≤A(i,j)<aS, то K(i,j)=mS, где mS - целочисленная метка s-го уровня. Пороги выбираются или из эмпирических соображений, или на основе статистических характеристик амплитуды элементов, расположенных в рамке, размер которой превышает размер изображения искомого объекта на поверхности. Результатом пороговой обработки является матрица контрастностей K(i,j), которая передается на вход блока сегментации.
2. Блок сегментации объединяет элементы матрицы K(i,j) в связные непересекающиеся подмножества (сегменты) с одинаковым уровнем контрастности с присвоением каждому такому подмножеству определенной метки. Работа блока основана на построчном считывании матрицы K(i,j), объединении соседних элементов с одинаковой контрастностью в участки связности по строке с присвоением каждому участку своего номера, определении перекрывающихся участков в соседних строках с одинаковой контрастностью и их объединении путем переприсвоения номеров участков по определенному правилу. Результатом операций сегментации является матрица меток M(i,j), где каждому i,j-му элементу присваивается номер сегмента, которому он принадлежит. Для снижения объема последующих вычислений в процессе сегментации вычисляются рекуррентно и запоминаются в векторе признаков Vk каждого k-го сегмента геометрические характеристики: координаты центра тяжести, площадь (число элементов), габариты и др.
3. После сегментации матрица меток M(i,j) или векторы признаков Vk, k=1,2,...m, где m - число сегментов, подаются на блок селекции, в котором выбираются группы сегментов, соответствующих по совокупности геометрических характеристик изображению объекта. Необходимость селекции обусловлена наличием изображений объектов, разделяемых на несколько сегментов с разной контрастностью, а также возможностью разделения сегментов (при малом отношении сигнал/шум) на несколько частей. Результатом работы блока селекции является матрица объединенных сегментов S(i,j) предполагаемого изображения объекта или несколько таких матриц, которые одна за другой вместе с координатами (х0, y0) центра тяжести S(i,j) передаются на блок поворота.
4. Блок поворота работает по принципу коррелятора. Вначале центр тяжести (х0, y0) подлежащего распознаванию изображения S(i,j) совмещается с центром тяжести  эталонного изображения SE(i,j).
эталонного изображения SE(i,j).
Далее осуществляется последовательный поворот SE(i,j) относительно S(i,j) с определением угла а наилучшего совмещения изображений в смысле минимума функции ρ(S,SE) - меры расстояния между S и SE. Координаты центра тяжести (х0, y0) и оценка угла поворота α совместно с заданными на эталоне координатами точки сопровождения (хE, yE) подаются на блок оценивания координат, где вычисляются оценки координат  точки сопровождения.
точки сопровождения.
Данный алгоритм позволяет распознавать плоские изображения объектов на поверхности. Однако, если несколько объектов с близкой конфигурацией имеют разную высоту, то алгоритм их не различает.
Предложенный способ получения трехмерных РЛ-изображений позволяет дополнительно с матрицей объединенного сегмента S(i,j) определить значение высоты H(i,j)=Н, общее для всех элементов сегмента S(i,j), которое в качестве дополнительного признака Н учитывается при вычислении меры близости текущего S(i,j) и эталонного SE(i,j) изображений ρ(S,SE,H,HE). Это дает принципиально новое решение проблемы автоматического распознавания радиолокационных изображений объектов с близкой конфигурацией, но различной высоты.
Предложенный способ также позволяет совместно с амплитудным изображением A(i,j) выводить на экран индикатора матрицу высот H(i,j) с указанием высоты либо в градациях основных цветов (соответственно уровню высоты), либо в изометрии. Это дает возможность пилоту своевременно обнаруживать препятствия при маловысотном полете, что увеличивает безопасность таких полетов, а также правильно идентифицировать изображения объектов на поверхности при высотном полете, что увеличивает вероятность правильного обнаружения и распознавания РЛИ объектов.
Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой РЛС, работающей в режиме повышенного разрешения синтезирования апертуры антенны за счет селекции по доплеровской частоте. Технический результат направлен на получение трехмерного радиолокационного изображения поверхности путем дополнительного измерения высоты в точках (пикселах) изображения, граничащих с РЛ-тенью, и присвоения измеренных значений высоты другим точкам. Способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС заключается в создании режима повышенного разрешения, позволяющего сформировать матрицу A(i,j) двумерного радиолокационного изображения в виде совокупности амплитуд отраженного сигнала, зафиксированных в i-x элементах разрешения дальности и j-x синтезированных элементах разрешения по азимуту (доплеровской частоте), отличающийся тем, что для каждого i,j-го элемента матрицы изображения поверхности, создающего РЛ-тень, дополнительно с амплитудой сигнала отражения A(i,j) по длине тени измеряют высоту, значение которой присваивают другим элементам матрицы по определенному правилу, и тем самым формируют матрицу высот H(i,j), которая совместно с матрицей A(i,j) представляет трехмерное изображение поверхности. 2 ил.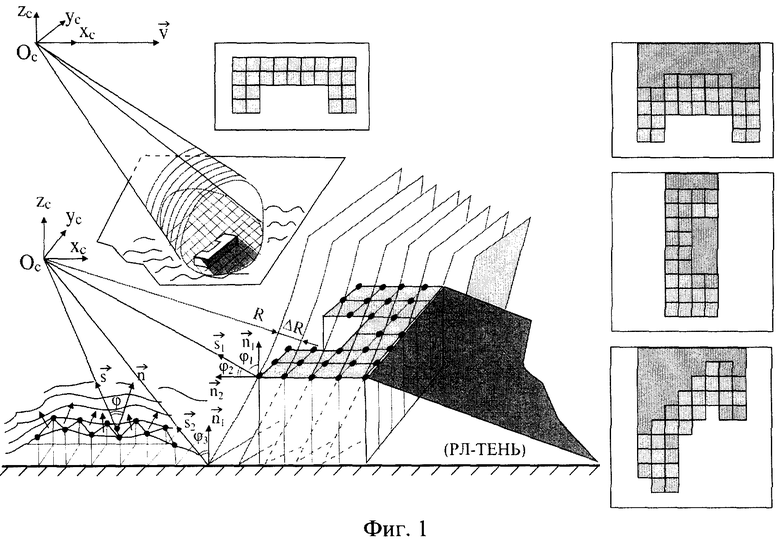
Способ получения трехмерного изображения поверхности в зоне обзора бортовой РЛС, заключающийся в создании режима повышенного разрешения, позволяющего сформировать матрицу A(i,j) двумерного радиолокационного изображения в виде совокупности амплитуд отраженного сигнала, зафиксированных в i-x элементах разрешения дальности и j-x синтезированных элементах разрешения по азимуту (доплеровской частоте), отличающийся тем, что для каждого i,j-го элемента матрицы изображения поверхности, создающего радиолокационную тень, дополнительно с амплитудой сигнала отражения A(i,j) по длине тени измеряют высоту Н, значение которой присваивают другим элементам матрицы, и тем самым формируют матрицу высот H(i,j), после формирования матрицы амплитуд A(i,j) осуществляют ее пороговую обработку и сегментацию путем разделения матрицы A(i,j) на однородные по амплитуде непересекающиеся подобласти изображения с присвоением каждой такой подобласти своей метки, причем подобласти с амплитудой, лежащей ниже порогового значения шумов аппаратуры, соответствующей радиолокационной тени, помечают нулевой меткой, затем для каждого столбца матрицы изображения определяют последовательности следующих подряд элементов с нулевой меткой и для каждой такой последовательности вычисляют высоту поверхности Н по формуле
где n - длина тени в числе элементов нулевой последовательности; h - высота полета объекта носителя РЛС; m - расстояние между РЛС и начальной точкой образования тени в числе элементов разрешения по наклонной дальности, далее эту высоту присваивают всем элементам сегмента, граничащего с нулевой последовательностью, и, если с данным сегментом граничит несколько нулевых последовательностей, то для всех точек сегмента или для одной его метки запоминают максимальную высоту, а для незаполненных элементов матрицы H(i,j) оставляют первоначально заданное нулевое значение высоты, тем самым формируют матрицу высот H(i,j).
| КОНДРАТЕНКОВ Г.С., ФРОЛОВ А.Ю | |||
| Радиовидение в передней зоне обзора бортовой радиолокационной станции с синтезированной апертурой антенны | |||
| Радиотехника | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ТРЕХМЕРНЫЙ ИНДИКАТОР РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1998 |
|
RU2140091C1 |
| ВИЗУАЛЬНОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ | 1995 |
|
RU2168192C2 |
| US 5896098 А, 20.04.1999 | |||
| US 5384573 A, 24.01.1995 | |||
| Способ получения этилового эфира 9-фенилгидразоно-6-метил-4-оксо-6,7,8,9-тетрагидро-4н-пиридо/1,2-а/-пиримидин-3-карбоновой кислоты | 1980 |
|
SU978730A3 |

