Изобретение относится к аудиосигналам (в частности, сигналы преобразователя звука) и к устройствам или способам для их получения, передачи, преобразования и воспроизведения.
В общем случае подобные системы пытаются отображать или внушать для человеческого уха декодируемую пространственную информацию. Это может достигаться либо через воспроизведение двух или более имеющих различные свойства конечных сигналов, посредством дополнения искусственных первых отражений или искусственных диффузных звуков или посредством имитации акустических условий по отношению к голове человека с помощью HRTF. Эти решения используются, в особенности, для того, чтобы монофонические аудиосигналы преобразовать в такие сигналы, которые сообщают уху фактическое или фиктивное ощущение объема помещения. Подобные методы обозначаются как «псевдостереофонические».
Псевдостереофонические сигналы по сравнению с обычными стереосигналами, как правило, имеют недостатки. В особенности, по психоакустическим причинам, возможность локализации источников звука, например, в случае методов, которые распределяют частотный спектр с различными сдвигами фазы на оконечные сигналы, ограничена. Также применение различий во времени распространения приводит, как правило, ввиду подобных причин, к противоречивой локализации. Искусственное замирание, также по психоакустическим причинам, вызывает у слушателя явления утомления. Был предложен ряд решений, в частности Gerzon (см. ниже), которые должны устранять подобные противоречивости при стереофоническом отображении источников звука. Однако воспроизведение первоначальных пространственных условий, как их в состоянии воспроизводить традиционные стереосигналы, не осуществляется, как правило, и при сложных применениях.
В частности, псевдостереофония, основанная на имитации стереофонических по интенсивности методов, обнаруживает особую проблематику, состоящую в том, что основанный на характеристике направленности в форме восьмерки монофонический аудиосигнал невозможно стереофонизировать ввиду отсутствия воспроизведения звука, падающего со стороны.
Уровень техники образуют следующие документы:
Патент США 5173944 рассматривает при постоянном азимуте 90 градусов, 120 градусов, 240 градусов и 270 градусов сигналы, полученные посредством HRTF из различным образом задержанного, но единым образом усиленного основного сигнала, которые накладываются на основной сигнал. При этом коррекции по уровню и времени распространения остаются независимыми от первоначальной ситуации приема.
Патент США 6636608 предлагает определенные в зависимости от частоты сдвиги фазы стереофонизируемого монофонического сигнала, которые с различным - также независимым от ситуации приема - усилением накладываются в левом и в правом канале на первоначальный монофонический аудиосигнал.
Уже упомянутый документ - патент США 5671287 (Gerzon) - усовершенствует предложенный Orban метод (в котором из монофонического аудиосигнала получают суммарный и разностный сигналы, которые имеют частотно-зависимые сдвиги фазы, независимо от ситуации приема), причем эти усовершенствования также основываются на частотно-зависимых сдвигах фазы или на независимом от ситуации приема усилении при легко изменяемом формировании суммарного и разностного сигнала.
Собственная европейская заявка № 060084555 предлагает методический учет вручную или измерениями определяемого угла фи, который заключают главная ось и источник звука, с применением зависимых от угла фи разностей времен распространения и уровней. Если угол фи равен нулю, то совместимое стереофоническое отображение невозможно.
Описываемое далее изобретение должно предоставлять заметное улучшение стереофонического воспроизведения монофонически отображенного источника звука, причем с учетом ситуации приема. Причем для упомянутой, до настоящего времени проблематичной для стереофонических по интенсивности имитаций характеристики направленности в форме восьмерки должен быть предложен надежный метод стереофонизации. Кроме того, должна быть обеспечена возможность совместимого стереофонического воспроизведения и для случая, когда угол фи, который образуют главная ось и источник звука, равен нулю.
Сущность изобретения может быть представлена следующим образом:
Техническое решение (предложенное в собственной европейской заявке № 060084555) методического учета угла фи, который заключают главная ось и источник звука, с применением зависимых от угла фи разностей времени распространения и уровней, содержит MS-матрицирование, причем для входных сигналов M и S и результирующих сигналов L и R справедливы следующие соотношения:
Классический S-сигнал имеет, что характерно для MS-техники, характеристику направленности в форме восьмерки, причем он по отношению к М-сигналу смещен на 90 градусов влево. Если теперь уровень S-сигнала по отношению к М-сигналу повышается, то так называемый угол раскрыва 2α уменьшается (который получается из точек пересечения накладывающихся полярных диаграмм М-системы и S-системы и - как характеристика направленности в форме восьмерки S-системы - расположен постоянно симметрично относительно главной оси М-сигнала) в возрастающей степени.
На первом этапе можно параметризировать фиктивный угол раскрыва 2α в устройстве или способе, который учитывает угол фи, который заключают главная ось и источник звука. Вычисленный имитированный боковой сигнал зависит тогда как от угла фи, так и от половинного фиктивного угла раскрыва α.
На втором этапе коэффициенты усиления применяются только для сигналов, которые в сумме дают боковой сигнал.
На третьем этапе параметризируется зависимое от угла расстояние f между полюсами, описывающее характеристику направленности М-сигнала. Тем самым можно теперь монофонические сигналы любой характеристики направленности стереофонизировать с учетом фиктивного угла раскрыва 2α.
Раскрытие изобретения
Изобретение заключается в параметризации фиктивного угла раскрыва α+β. При этом альфа представляет фиктивный левый угол раскрыва (лежащий слева от главной оси стереофонизируемого монофонического аудиосигнала), бета представляет фиктивный правый угол раскрыва (лежащий справа от главной оси стереофонизируемого монофонического аудиосигнала), причем может выполняться α≠β. Таким образом, рассматривается не возникающий в классическом MS-матрицировании случай возможного несимметричного к главной оси стереофонизируемого монофонического аудиосигнала фиктивного угла раскрыва α+β.
Соответственно этому тригонометрически определенные разности уровней и времен распространения для имитированного бокового сигнала, наряду с фи и f, также делаются зависимыми от фиктивного левого угла раскрыва α и от фиктивного правого угла раскрыва β, причем - если источник звука должен располагаться слева от главой оси - должно выполняться условие φ≤α, или - если источник звука должен располагаться справа от главой оси - должно выполняться условие φ≤β. В каждом случае для альфа и бета должен исключаться нуль или окрестность нуля, так как вычисленные при параметризации альфа или бета разности уровней или времен распространения сходятся к бесконечности, то есть технически не реализуемы.
За счет соответствующего выбора альфа и бета можно, следовательно, достичь стереофонического воспроизведения монофонического аудиосигнала, которое предоставляет по меньшей мере более благоприятные условия, чем методы, которые не учитывают параметризацию фиктивного угла раскрыва α+β. В особенности, возможно также совместимое стереофоническое разрешение для случая, когда фи равно нулю. При этом углы альфа и бета можно при выполнении вышеназванных условий свободно выбирать или соответственно определять посредством подходящего алгоритма.
Тригонометрически для угла фи, зависимого от угла расстояния f между полюсами, описывающего характеристику направленности М-сигнала, и углов альфа и бета получаются следующие времена задержки L(альфа), L(бета) или коэффициенты усиления Р(альфа), Р(бета) (которые следует применять, чтобы обеспечить возможность неограниченного выбора фи, f, а также альфа и бета, к создающим имитированный боковой сигнал S сигналам S(альфа) и S(бета)):
Упрощение для устройств или способов, которое используется согласно сущности изобретения, представляет собой указание, что дискриминанты L(альфа) или L(бета) можно использовать непосредственно для определения Р(альфа) или Р(бета). Схемы включения или алгоритмы тем самым заметно упрощаются, что означает миниатюризацию соответствующих аппаратных средств при максимальной эффективности.
В частности, для вышеупомянутой проблематики стереофонизации монофонического аудиосигнала с характеристикой направленности в форме восьмерки выводится следующее решение на основе описывающего характеристику направленности в форме восьмерки М-сигнала, зависимого от полярного угла ψ расстояния f(ψ)=cos ψ между полюсами:

Для сущности изобретения остается характерным то, что результирующие MS-сигналы в заключение должны подвергаться стереопреобразованию согласно формулам (1) и (2). В результате получается классический стереосигнал.
С включением аппаратуры и методик, которые представляют уровень техники, можно в остальном, с применением изобретения, получить сигналы, которые через более чем два динамика доставляют стереофоническую информацию (как, например, принадлежащие уровню техники системы объемного звучания).
Краткое описание чертежей
Формы выполнения и примеры применения предлагаемого изобретения поясняются ниже со ссылками на следующие чертежи:
фиг.1 представляет принцип функционирования согласно европейской заявке № 060084555.
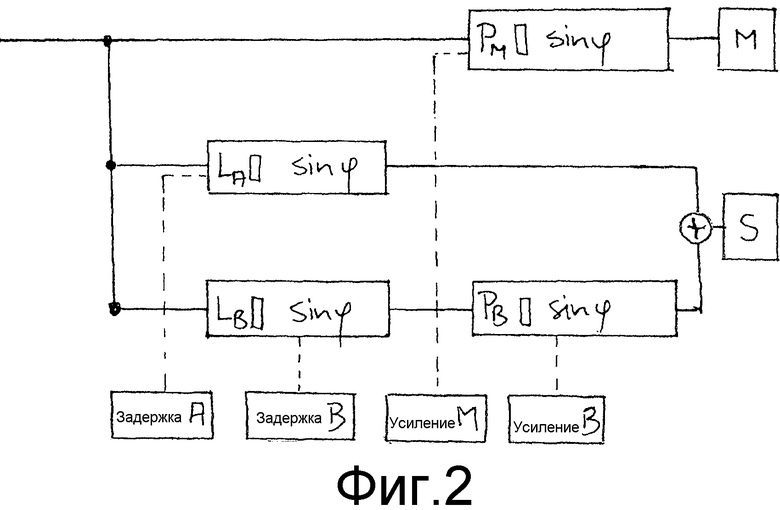
Фиг.2 представляет схему, которая согласно европейской заявке № 060084555 преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать.
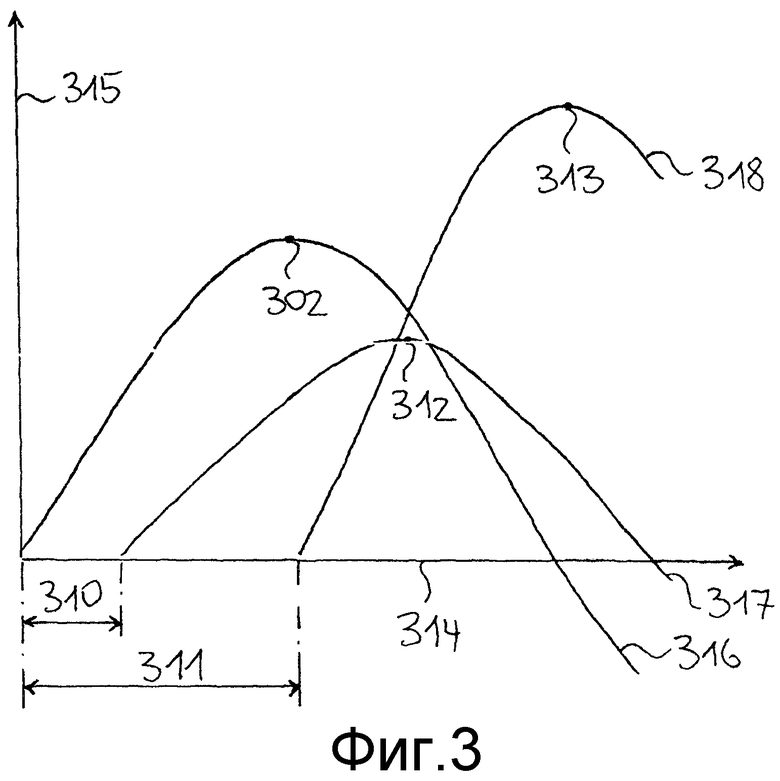
Фиг.3 - отображает внутренние сигналы схемы, показанной на фиг.2.
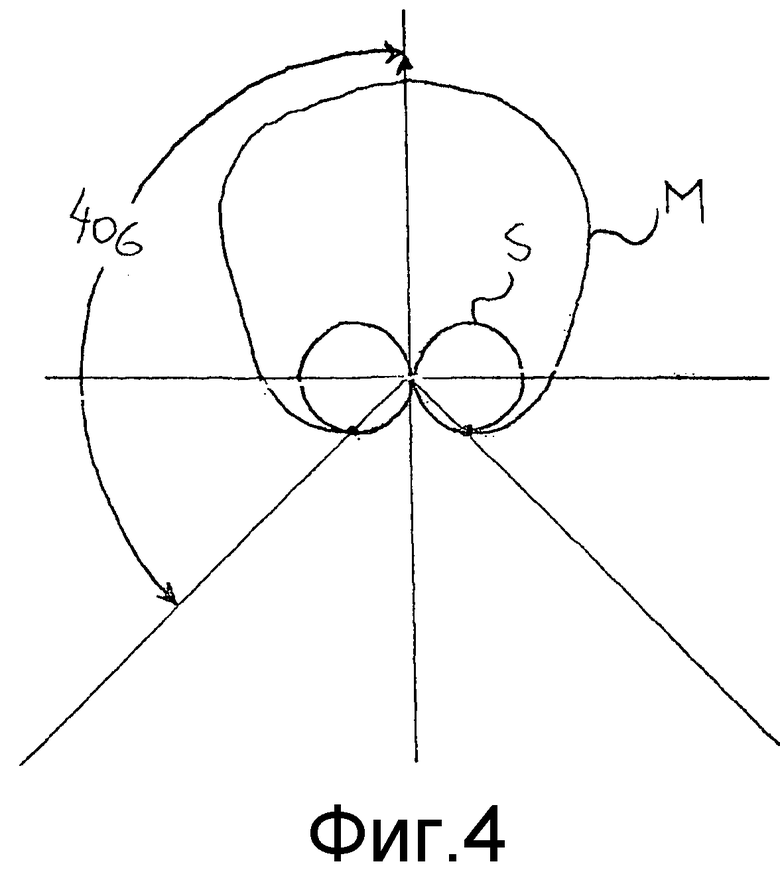
Фиг.4 представляет классическую MS-конфигурацию для половинного угла раскрыва альфа, равного 135 градусам, состоящую из М-системы с характеристикой направленности в форме кардиоиды и S-системы с характеристикой направленности в форме восьмерки.
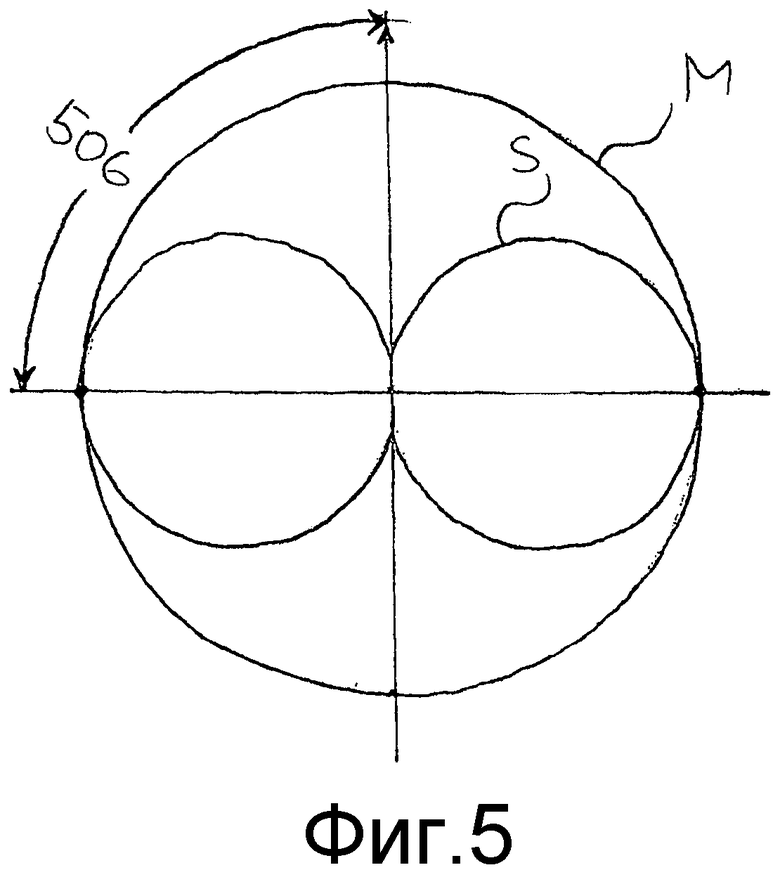
Фиг.5 представляет классическую MS-конфигурацию для половинного угла раскрыва альфа, равного 90 градусам, состоящую из М-системы со сферической характеристикой направленности и S-системы с характеристикой направленности в форме восьмерки.
Фиг.6 представляет классическую MS-конфигурацию для половинного угла раскрыва альфа, равного 53 градусам, состоящую из М-системы с характеристикой направленности в форме кардиоиды и S-системы с характеристикой направленности в форме восьмерки.
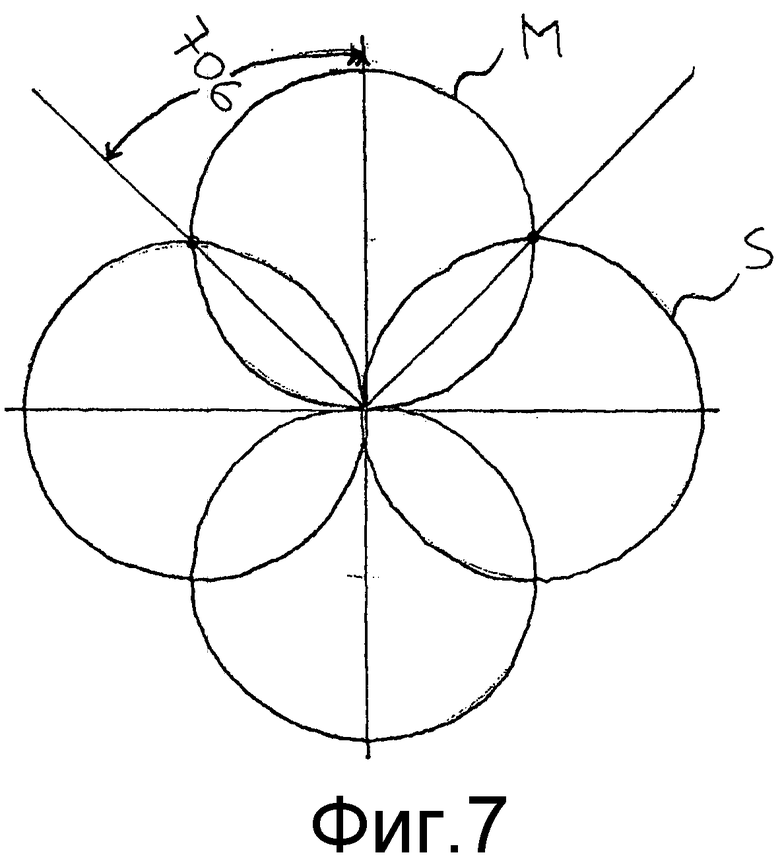
Фиг.7 представляет классическую MS-конфигурацию для половинного угла раскрыва альфа, равного 45 градусам, состоящую из М-системы с характеристикой направленности в форме восьмерки и S-системы с характеристикой направленности в форме восьмерки.
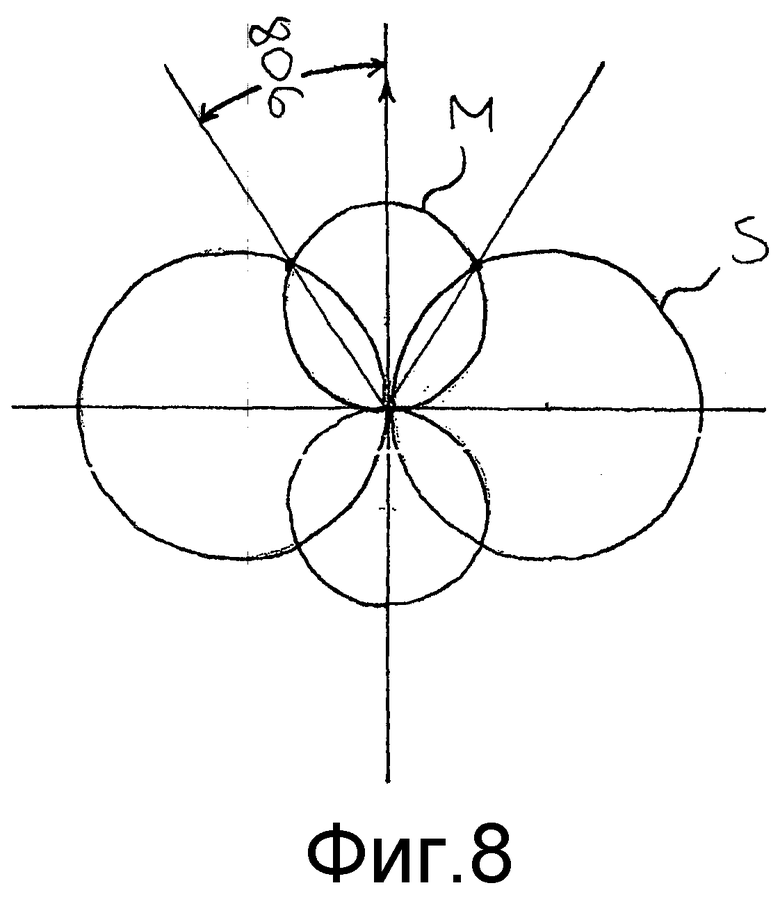
Фиг.8 представляет классическую MS-конфигурацию для половинного угла раскрыва альфа, равного 33,5 градусам, также состоящую из М-системы с характеристикой направленности в форме восьмерки и S-системы с характеристикой направленности в форме восьмерки.
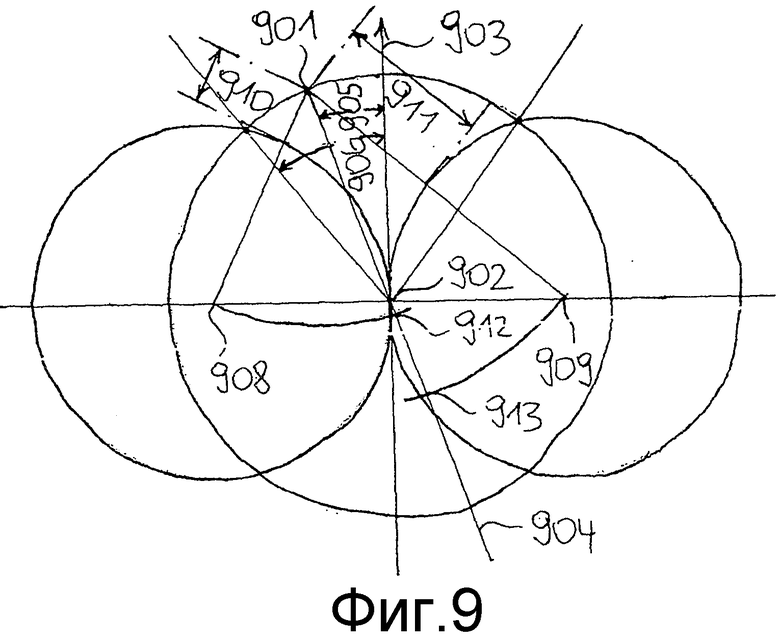
Фиг.9 представляет расширение принципа функционирования согласно европейской заявке № 060084555, при котором учитывается фиктивный половинный угол раскрыва альфа.
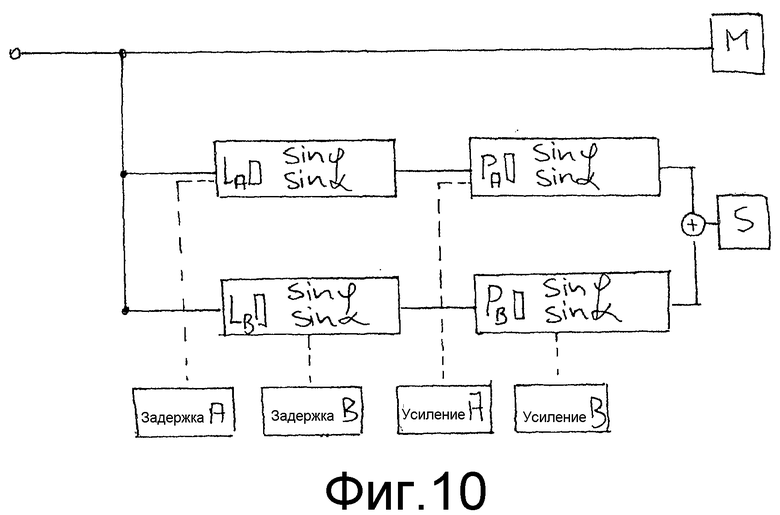
Фиг.10 представляет схему, которая с учетом фиктивного половинного угла раскрыва альфа преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать.
Фиг.11 представляет для примера принцип функционирования изобретения для сигнала со сферической характеристикой направленности, которая учитывает левый фиктивный угол раскрыва альфа и правый фиктивный угол раскрыва бета, которые не могут возникать для S-сигнала в классической MS-конфигурации, ввиду применения повернутой влево на 90 градусов, симметричной относительно главной оси системы с характеристикой направленности в форме восьмерки.
Фиг.12 представляет для примера принцип функционирования изобретения для сигнала с характеристикой направленности в форме кардиоиды.
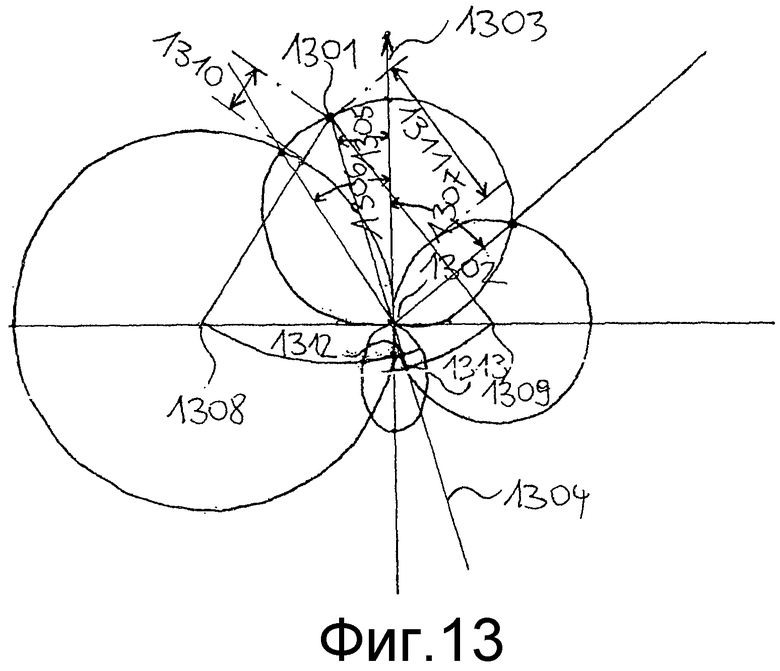
Фиг.13 представляет для примера принцип функционирования изобретения для сигнала с характеристикой направленности в форме гиперкардиоиды.
Фиг.14 представляет для примера принцип функционирования изобретения для сигнала с характеристикой направленности в форме восьмерки.
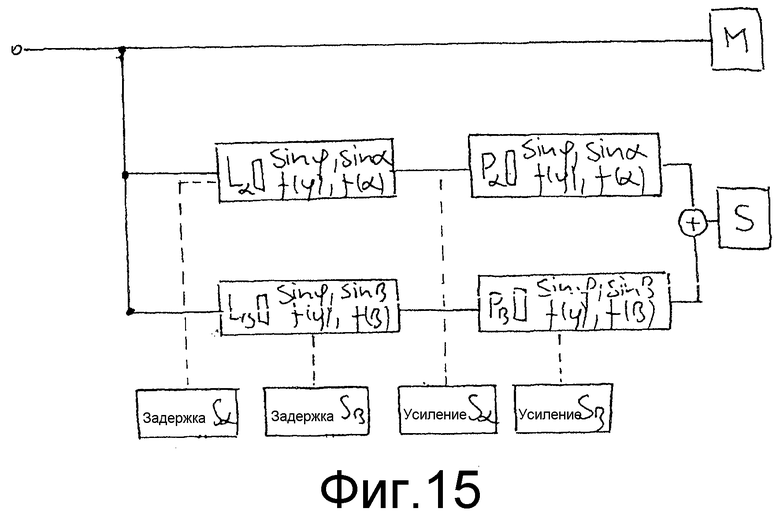
Фиг.15 представляет схему согласно сущности изобретения, которая с учетом угла приема фи, левого фиктивного угла раскрыва альфа, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами, преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать.
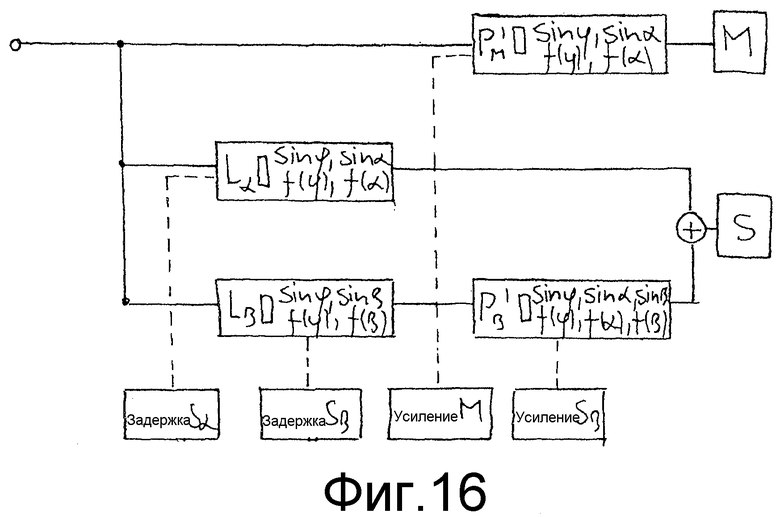
Фиг.16 представляет вариант схемы по фиг.15, причем для угла приема фи, левого фиктивного угла раскрыва альфа и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами, должно выполняться условие, что выражение
не равно нулю или элемент окружения является нулевым.
Фиг.17 представляет другой вариант схемы по фиг.15, причем для угла приема фи, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами, должно выполняться условие, что выражение

не равно нулю или элемент окружения является нулевым.
Фиг.18 представляет параметры ti, Pi(ti) по фиг.19.
Фиг.19 представляет диаграмму последовательности операций способа согласно сущности изобретения, который с учетом угла приема фи, левого фиктивного угла раскрыва альфа, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами при достаточно малых интервалах [ti, ti+1], преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать.
Детальное описание форм выполнения и примеров применения изобретения
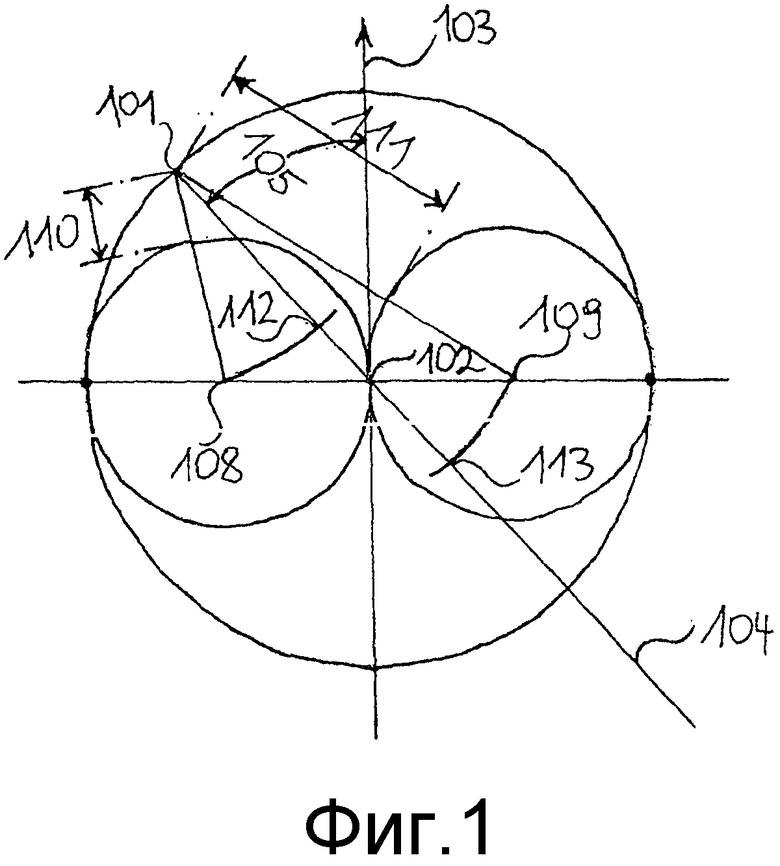
Уровень техники относительно принципа функционирования устройства или способа стереофонизации монофонического сигнала со сферической характеристикой направленности схематично представлен на фиг.1.
Источник 101 звука принимается в позиции 102 микрофоном со сферической характеристикой направленности, причем главная ось 103 и ось пеленга 104 источника звука заключают угол фи (105). 108 и 109 изображают геометрическое позиционирование тех двух имитированных сигналов, которые в сумме дают имитированный боковой сигнал. Разность времени распространения по отношению к главному сигналу для имитированного левого сигнала представлена как 110, уровень имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 101 до 112 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времен распространения по отношению к главному сигналу для имитированного правого сигнала представлена как 111, уровень имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 101 и 113.
При взвешивании уровня, при котором входной сигнал непосредственно соответствует имитированному левому сигналу, для схемы, которая монофонический входной сигнал преобразует в MS-сигналы, которые можно стереофонизировать, получается схема по фиг.2. При этом путем тригонометрического определения для разностей времен распространения LA

Характеристики внутренне обработанных сигналов представлены на фиг.3. Главному сигналу 316 противостоят два имитированных сигнала 317 (с временем задержки 310) и 318 (с временем задержки 311), причем 314 представляет ось времени, а 315 - ось уровня. Максимальная точка 302 уровня вычисляется из максимальной точки 312 уровня по формуле (15), а максимальная точка 313 уровня - по формуле (16).
Для вывода работающих в зависимости от угла устройств или методик для получения псевдостереофонических аудиосигналов сначала рассматривается классическое MS-матрицирование для различных половинных углов раскрыва а и различных характеристик направленности М-системы. Для всех методик, ввиду симметрии повернутой влево на 90 градусов S-системы относительно главной оси М-системы, характерным является также расположенный симметрично относительно главной оси угол раскрыва 2α, который вычисляется из точек пересечения перекрывающихся полярных диаграмм М-системы или S-системы.
Так фиг.4 представляет классическую МS-конфигурацию для половинного угла раскрыва альфа (406), равного 135 градусам, состоящую из М-системы с характеристикой направленности в форме кардиоиды и S-системы с характеристикой направленности в форме восьмерки. Фиг.5 представляет классическую МS-конфигурацию для половинного угла раскрыва альфа (506), равного 90 градусам, состоящую из М-системы со сферической характеристикой направленности и S-системы с характеристикой направленности в форме восьмерки. Фиг.6 представляет классическую МS-конфигурацию для половинного угла раскрыва альфа (606), равного 53 градусам, состоящую из М-системы с характеристикой направленности в форме кардиоиды и S-системы с характеристикой направленности в форме восьмерки. Фиг.7 представляет классическую МS-конфигурацию для половинного угла раскрыва альфа (706), равного 45 градусам, состоящую из М-системы с характеристикой направленности в форме восьмерки и S-системы с характеристикой направленности в форме восьмерки. Фиг.8 представляет классическую МS-конфигурацию для половинного угла раскрыва альфа (806), равного 33,5 градусам, также состоящую из М-системы с характеристикой направленности в форме восьмерки и S-системы с характеристикой направленности в форме восьмерки.
Расширение принципа функционирования, который выводится из фиг.1, представляет дополнительный учет фиктивного половинного угла раскрыва альфа, как представлено на фиг.9. Источник 901 звука принимается при этом монофоническим микрофоном 902 со сферической характеристикой направленности, причем главная ось 903 и ось пеленга 904 источника звука заключают угол фи (905). Вновь учитывается фиктивный половинный угол раскрыва альфа (906). Из него, а также из характеристики направленности главного сигнала выводятся непосредственно геометрическое позиционирование 908 имитированного левого сигнала SA и геометрическое позиционирование 909 имитированного правого сигнала SB, которые в сумме дают имитированный боковой сигнал. Разность времен распространения по отношению к главному сигналу для имитированного левого сигнала представляется как 910, уровень имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 901 до 912 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времен распространения по отношению к главному сигналу для имитированного правого сигнала представлена как 911, уровень имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 901 и 913.
Соответствующую, несколько модифицированную по отношению к схеме по фиг.2, схему представляет фиг.10, которая с учетом фиктивного половинного угла раскрыва альфа преобразует монофонический входной сигнал в MS-сигналы, которые можно стереофонизировать. При этом для разностей времен распространения LA
Применение сущности изобретения к главному сигналу со сферической характеристикой направленности
Первый пример применения изобретения по отношению к монофоническому аудиосигналу показывает фиг.11. Здесь в соответствии с изобретением фиктивный угол раскрыва α+β параметризируется, причем альфа представляет фиктивный левый угол раскрыва 1106 (расположенный влево от главной оси стереофонизируемого монофонического аудиосигнала), бета представляет фиктивный правый угол раскрыва 1107 (расположенный вправо от главной оси стереофонизируемого монофонического аудиосигнала), - таким образом, углы, которые в классической MS-конфигурации, ввиду применения повернутой на 90 градусов влево относительно главной оси симметричной S-системы с характеристикой направленности в форме восьмерки, вообще не могут возникать.
Таким образом, сущность изобретения приводит к учету фиктивного угла раскрыва α+β, возможно несимметричного относительно главной оси стереофонизируемого монофонического аудиосигнала.
Более детально, также устройство содержит источник звука 1101, который принимается монофоническим микрофоном 1102 со сферической характеристикой направленности, причем главная ось 1103 микрофона и ось пеленга 1104 источника звука образуют угол фи (1105). Далее параметризируются фиктивный левый угол раскрыва альфа (1106) и фиктивный правый угол раскрыва бета (1107), причем - если источник звука должен располагаться слева от главой оси - должно выполняться условие φ≤α, или - если источник звука должен располагаться справа от главой оси - должно выполняться условие φ≤β. В каждом случае для альфа и бета должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения сходятся к бесконечности, то есть технически не реализуемы).
Альфа совместно с характеристикой направленности главного сигнала теперь точно определяет геометрическое позиционирование 1108 имитированного левого сигнала S(альфа), и бета совместно с характеристикой направленности главного сигнала точно определяет геометрическое позиционирование 1109 имитированного правого сигнала S(бета), которые в сумме дают имитированный боковой сигнал. Разность времен распространения L(альфа) относительно главного сигнала для имитированного левого сигнала изображает 1110, уровень Р(альфа) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 1101 до 1112 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времен распространения L(бета) по отношению к главному сигналу для имитированного правого сигнала представлена как 1111, уровень Р(бета) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 1101 и 1113.
Тригонометрически получаются согласно этому следующие времена задержки L(альфа), L(бета) или коэффициенты усиления Р(альфа), Р(бета) (которые следует применять, чтобы обеспечить возможность неограниченного выбора фи, альфа и бета, к создающим имитированный боковой сигнал S сигналам S(альфа) и S(бета)):
Применение сущности изобретения к главному сигналу с характеристикой направленности в форме кардиоиды (фиг.12)
Рассматриваемое устройство содержит источник звука 1201, который принимается монофоническим микрофоном 1202 с характеристикой направленности в форме кардиоиды, причем главная ось 1203 микрофона и ось пеленга 1204 источника звука образуют угол фи (1205). Далее параметризируются фиктивный левый угол раскрыва альфа (1206) и фиктивный правый угол раскрыва бета (1207), причем вновь - если источник звука должен располагаться слева от главой оси - должно выполняться условие φ≤α, или - если источник звука должен располагаться справа от главой оси - должно выполняться условие φ≤β. Далее вновь для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения также сходятся к бесконечности, то есть технически не реализуемы).
Альфа совместно с характеристикой направленности главного сигнала теперь точно определяет геометрическое позиционирование 1208 имитированного левого сигнала S(альфа), и бета также совместно с рассматриваемой здесь характеристикой направленности точно определяет геометрическое позиционирование 1209 имитированного правого сигнала S(бета), которые в сумме дают имитированный боковой сигнал. Разность времен распространения L(альфа) относительно главного сигнала для имитированного левого сигнала изображает 1210, уровень Р(альфа) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 1201 до 1212 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времени распространения L(бета) по отношению к главному сигналу для имитированного правого сигнала представлена как 1211, уровень Р(бета) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 1201 и 1213.
Вновь можно тригонометрически вычислить следующие времена задержки L(альфа), L(бета) или коэффициенты усиления Р(альфа), Р(бета) с учетом расстояния между полюсами, зависимого от полярного угла ψ, описывающего характеристику направленности в форме кардиоиды М-сигнала:
(причем коэффициенты усиления следует применять, чтобы обеспечить возможность неограниченного выбора фи, альфа и бета, к создающим имитированный боковой сигнал S сигналам S(альфа) и S(бета)):
Применение сущности изобретения к сигналу с характеристикой направленности в форме гиперкардиоиды (фиг.13)
Устройство содержит источник звука 1301, который принимается монофоническим микрофоном 1302 с характеристикой направленности в форме гиперкардиоиды, причем главная ось 1303 микрофона и ось пеленга 1304 источника звука образуют угол фи (1305). Далее параметризируются фиктивный левый угол раскрыва альфа (1306) и фиктивный правый угол раскрыва бета (1307), причем вновь - если источник звука должен располагаться слева от главой оси - должно выполняться условие φ≤α, или - если источник звука должен располагаться справа от главой оси - должно выполняться условие φ≤β. Вновь для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля, так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения сходятся к бесконечности, то есть технически не реализуемы.
Альфа вновь совместно с характеристикой в форме гиперкардиоиды главного сигнала точно определяет геометрическое позиционирование 1308 имитированного левого сигнала S (альфа), и бета совместно с характеристикой направленности в форме гиперкардиоиды точно определяет геометрическое позиционирование 1309 имитированного левого сигнала S (бета), которые в сумме дают имитированный боковой сигнал. Разность времени распространения L (альфа) относительно главного сигнала для имитированного левого сигнала изображает 1310, уровень Р (альфа) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 1301 до 1312 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времени распространения L (бета) по отношению к главному сигналу для имитированного правого сигнала представлена как 1311, уровень Р (бета) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 1301 и 1313.
Времена задержки L (альфа), L (бета) или коэффициенты усиления Р (альфа), Р (бета) с учетом расстояния между полюсами, зависимого от полярного угла ψ, описывающего характеристику направленности в форме гиперкардиоиды М-сигнала:
(28а) 
(причем n принимает значение 1,5) могут тригонометрически вычисляться (причем коэффициенты усиления - чтобы обеспечивать возможность неограниченного выбора фи, альфа и бета по отношению к характеристике направленности - следует применять к создающим имитированный боковой сигнал S сигналам S(альфа) и S(бета)):
Применение сущности изобретения к сигналам с другими особыми формами характеристики направленности в форме кардиоиды
Если стереофонизируемый входной сигнал имеет особую форму характеристики направленности в форме кардиоиды, то соответствующие разности L(альфа), L(бета) времен распространения или коэффициенты Р(альфа), Р(бета) усиления можно легко рассчитать по формулам (29)-(32). При этом для n справедливо соотношение: 0≤n≤2.
Если n принимает значение 1, то получаются коэффициенты усиления или разности времен распространения для входного сигнала с классической характеристикой направленности в форме кардиоиды, для значения 0 - соответствующие параметры для входного сигнала со сферической характеристикой направленности и для значения 2 - соответствующие параметры для входного сигнала с характеристикой направленности в форме восьмерки. Если n принимает значение 1,25, то получаются разности времен распространения или коэффициенты усиления для входного сигнала с характеристикой направленности в форме суперкардиоиды.
Применение формулы (28а) к расстоянию f между полюсами, которое приводит к формулам (29)-(32), оказывается согласно этому особенно благоприятным. Нужно только определить еще параметр n, чтобы описать почти все возможные характеристики направленности для М-сигнала, выраженные в полярных координатах (исключая лепестковую характеристику, которая при увеличивающейся частоте в возрастающей степени обнаруживает иные полярные координаты, чем они могли бы быть представлены посредством (28а)).
Применение сущности изобретения к сигналу с характеристикой направленности в форме восьмерки
Фиг.14 еще раз детально представляет случай применения для входного сигнала с характеристикой направленности в форме восьмерки, который выше уже обсуждался. Устройство содержит источник звука 1401, который принимается монофоническим микрофоном 1402 с характеристикой направленности в форме восьмерки, причем главная ось 1403 микрофона и ось пеленга 1404 источника звука заключают угол фи (1405). Параметризируются фиктивный левый угол раскрыва альфа (1406) и фиктивный правый угол раскрыва бета (1407), причем вновь - если источник звука должен располагаться слева от главой оси - должно выполняться условие φ≤α, или - если источник звука должен располагаться справа от главой оси - должно выполняться условие φ≤β. Далее вновь для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения также сходятся к бесконечности, то есть технически не реализуемы).
Альфа совместно с характеристикой направленности в форме восьмерки главного сигнала точно определяет геометрическое позиционирование 1408 имитированного левого сигнала S(альфа), и бета совместно с характеристикой направленности в форме восьмерки точно определяет геометрическое позиционирование 1409 имитированного правого сигнала S(бета), которые в сумме дают имитированный боковой сигнал. Разность времен распространения L(альфа) относительно главного сигнала для имитированного левого сигнала изображает 1410, уровень Р(альфа) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния от 1401 до 1412 (коррекция уровня с учетом интенсивности звука, снижающейся как квадрат расстояния). Разность времен распространения L(бета) по отношению к главному сигналу для имитированного правого сигнала представлена как 1411, уровень Р(бета) имитированного сигнала определяется из уровня главного сигнала, умноженного на квадрат расстояния между 1401 и 1413. Соответствующие формулы для времен задержки L(альфа), L(бета) или коэффициентов усиления Р(альфа), Р(бета) получаются из уравнений (7)-10) или из уравнений (29)-(32), если n равно 2 (причем коэффициенты усиления - чтобы обеспечивать возможность неограниченного выбора фи, альфа и бета по отношению к характеристике направленности - следует применять к создающим имитированный боковой сигнал S сигналам S(альфа) и S(бета)).
Применение сущности изобретения к схеме для стереофонизации монофонического сигнала
Фиг.15 представляет схему, обобщающую характеристику направленности входного сигнала, согласно сущности изобретения, которая с учетом угла приема фи, левого фиктивного угла раскрыва альфа, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать. Для разностей L(альфа), L(бета) времен распространения или коэффициентов Р(альфа), Р(бета) усиления можно использовать формулы (3)-(6). При этом входной сигнал непосредственно применяется как М-сигнал. S-сигнал представляется суммированием задержанного на время задержки L(альфа) входного сигнала, усиленного затем на коэффициент усиления Р(альфа), и задержанного на время задержки L(бета) входного сигнала, усиленного затем на коэффициент усиления Р(бета). Опять, - если φ>0 - должно выполняться условие φ≤α, или - если φ<0 - должно выполняться условие |φ|≤β. Также для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения также сходятся к бесконечности, то есть технически не реализуемы).
Вывод схем, которые при небольших ограничениях формируют эквивалентные сигналы
Из фиг.15, при взвешивании коэффициентов усиления, можно вывести работающую с небольшими ограничениями схему в форме, показанной на фиг.16. При этом ограничение состоит в условии, что для угла приема фи, левого фиктивного угла раскрыва альфа и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами, должно выполняться требование, что выражение

не равно нулю или элемент окружения является нулевым. При этом показанные на фиг.16 разности L(альфа), L(бета) времен распространения получаются непосредственно по формулам (3) и (4); для коэффициентов РМ' и Р(бета)' усиления справедливы соотношения:
Дополнительно, - если φ>0 - должно выполняться условие φ≤α, или - если φ<0 - должно выполняться условие |φ|≤β. Вновь для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения частично сходятся к бесконечности, то есть технически не реализуемы).
Второй вывод из фиг.15 при измененном взвешивании коэффициентов усиления дает также работающую с небольшими ограничениями схему в форме, показанной на фиг.17. При этом для угла приема фи, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами, должно выполняться требование, что выражение

не равно нулю или элемент окружения является нулевым. При этом показанные на фиг.17 разности L (альфа), L (бета) времен распространения получаются непосредственно по формулам (3) и (4); однако для коэффициентов РМ” и Р (альфа)' усиления теперь справедливы соотношения:


Вновь, - если φ>0 - должно выполняться условие φ≤α, или - если φ<0 - должно выполняться условие |φ|≤β. Также для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения частично сходятся к бесконечности, то есть технически не реализуемы).
Применение сущности изобретения к вычислительному способу для стереофонизации монофонического сигнала.
Монофонический входной сигнал можно с помощью системы координат в форме, показанной на фиг.18, представить математически, причем 1814 обозначает ось времени, а 1815 - ось уровня. 1819 представляет момент времени ti, 1820 обозначает точку уровня Pi(ti), соответствующую ti. Для достаточно малых интервалов [ti, ti+1], то есть при достаточной частоте выборки, можно теперь отобразить звуковое событие с достаточной точностью.
Фиг.19 представляет соответствующую диаграмму последовательности операций способа согласно сущности изобретения, который с учетом угла приема фи, левого фиктивного угла раскрыва альфа, правого фиктивного угла раскрыва бета и описывающего характеристику направленности М-сигнала, зависимого от угла расстояния f между полюсами при достаточно малых интервалах [ti, ti+1], преобразует монофонический аудиосигнал в MS-сигналы, которые можно стереофонизировать (при упрощающем предположении, что разность L(альфа) времен распространения или разность L(бета) времен распространения остается не равной нулю).
Для разностей L(альфа), L(бета) времен распространения или коэффициентов Р(альфа), Р(бета) усиления далее вновь справедливы уравнения (3)-(6).
Вычисляются М-сигнал (матрица [Mi(ti)]), а также S-сигнал (матрица [Si(ti)]), который представляется суммированием задержанного на время задержки L(альфа) входного сигнала, усиленного затем на коэффициент усиления Р(альфа), и задержанного на время задержки L(бета) входного сигнала, усиленного затем на коэффициент усиления Р(бета). Алгоритм исключает недопустимые значения альфа и бета. В общем случае для подобных алгоритмов, - если φ>0 - выполняется условие φ≤α, или - если φ<0 - выполняется условие |φ|≤β. Также для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения сходятся к бесконечности, то есть технически не реализуемы).
Вывод двух вычислительных способов, которые при небольших ограничениях формируют эквивалентные сигналы
Способ 1: Если алгоритмически гарантируется, что (33) не равно нулю или элемент окружения является нулевым, то можно для монофонического входного сигнала для достаточно малых интервалов [ti, ti+1] применить аналогичный фиг.19 вычислительный способ на основе фиг.16, причем теперь М-сигнал (матрица [Mi(ti)]) представляется усиленным на коэффициент (34). S-сигнал (матрица [Si(ti)]) представляет результат суммирования фактически задержанного на время задержки L(альфа) (см. формулу (3)) входного сигнала (матрица [Pi(ti)]) с фактически задержанным на время задержки L(бета) (см. формулу (4)) и затем усиленным на коэффициент усиления Р(бета)' (см. формулу (35)) входным сигналом (вновь матрица [Pi(ti)]). Алгоритм должен исключать недопустимые значения альфа и бета. Должно - если φ>0 - выполняться условие φ≤α, или - если φ<0 - выполняться условие |φ|≤β. Также для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения частично сходятся к бесконечности, то есть технически не реализуемы).
Способ 2: Если алгоритмически гарантируется, что (36) не равно нулю или элемент окружения является нулевым, то можно для монофонического входного сигнала для достаточно малых интервалов [ti, ti+1] применить аналогичный фиг.19 вычислительный способ на основе фиг.17, причем теперь М-сигнал (матрица [Mi(ti)]) представляется усиленным на коэффициент (37). S-сигнал (матрица [Si(ti)]) представляет результат суммирования фактически задержанного на время задержки L(альфа) (см. формулу (3)) и затем усиленного на коэффициент усиления Р(альфа)' (см. формулу (38) входного сигнала (матрица [Pi(ti)]) с фактически задержанным на время задержки L(бета) (см. формулу (4)) входным сигналом (вновь матрица [Pi(ti)]). Алгоритм должен исключать недопустимые значения альфа и бета. Должно - если φ>0 - выполняться условие φ≤α, или - если φ<0 - выполняться условие |φ|≤β. Также для альфа и бета в каждом случае должен исключаться нуль или окрестность нуля (так как при параметризации альфа или бета тригонометрически вычисляемые разности уровней или времен распространения частично сходятся к бесконечности, то есть технически не реализуемы).
В целом, следует заметить, что описанные устройства и способы позволяют, разумеется, осуществлять усиление соответствующих входных сигналов перед последующей задержкой.
Примеры областей применения изобретения
Пространственное кодирование принимаемого под определенным углом фи источника звука имеет большое практическое значение, особенно для телефонных сигналов. В устройствах громкой связи, применяемых, например, в автомобилях или в Интернет-телефонии, излученный монофонический сигнал принимается не как соответствующий реальной ситуации разговора, собеседник представляется как «ненаправленный». Однако если с помощью относящихся к уровню техники измерительных методов определить угол фи или полярные координаты функционально интерполировать (возможно, посредством алгоритмического учета максимумов и минимумов полярной диаграммы входного сигнала), и затем фиктивный левый угол раскрыва альфа и фиктивный правый угол раскрыва бета алгоритмически или вручную согласовать с ситуацией приема и прослушивания, то можно при применении (миниатюризируемой) схемы в форме, показанной на фиг.15, с последующим MS-матрицированием, получить стереофонический сигнал, который в большей степени соответствует ситуации разговора при естественных условиях.
Аналогичным образом можно действовать с монофоническими звукозаписями, при которых источники звука должны воспроизводиться стереофонически.
Также, если направление воспроизведения изолированного сигнально-технически источника звука в пределах стереофонического отображения воспринимается как слишком резкое, то с применением изобретения направление воспроизведения можно постепенно диспергировать.
Формирование характеристики направленности входного сигнала (возможно, выборочно посредством вариации полярных координат, описывающих характеристику направленности входного сигнала, включая возможное, например, относящееся к уровню техники применение гребенчатых фильтров в соединении с методами, базирующимися на быстром преобразовании Фурье (БПФ)) перед осуществлением устройства или способа согласно изобретению, могло бы, при обстоятельствах, дополнительно улучшить результат или обеспечить нормирование характеристики направленности входного сигнала.
Изобретение, в целом, может решающим образом способствовать дополнительному многомерному учету путей распространения сигналов. Поэтому его применение не ограничено приведенными выше примерами.



Изобретение относится к аудиосигналам и к устройствам или способам для их получения, передачи, преобразования и воспроизведения. Технический результат заключается в улучшении стереофонического воспроизведения монофонически отображаемого источника звука. Монофонический аудиосигнал любой характеристики направленности - при параметризации угла фи (1205), который заключают главная ось (1203) и направление прихода источника сигнала (1204), фиктивного левого угла раскрыва альфа (1206), а также фиктивного правого угла раскрыва бета (1207), а также характеристики направленности стереофонизируемого монофонического сигнала (представленного в полярных координатах) - подвергается целенаправленно коррекции по разности времен распространения (1210, 1211) и уровней (выводится из 1212 и 1213). В результате получаются М-сигнал и S-сигнал, которые позволяют MS-матрицирование (и тем самым стереофоническое воспроизведение первоначально монофонического аудиосигнала). 6 н. и 8 з.п. ф-лы, 20 ил.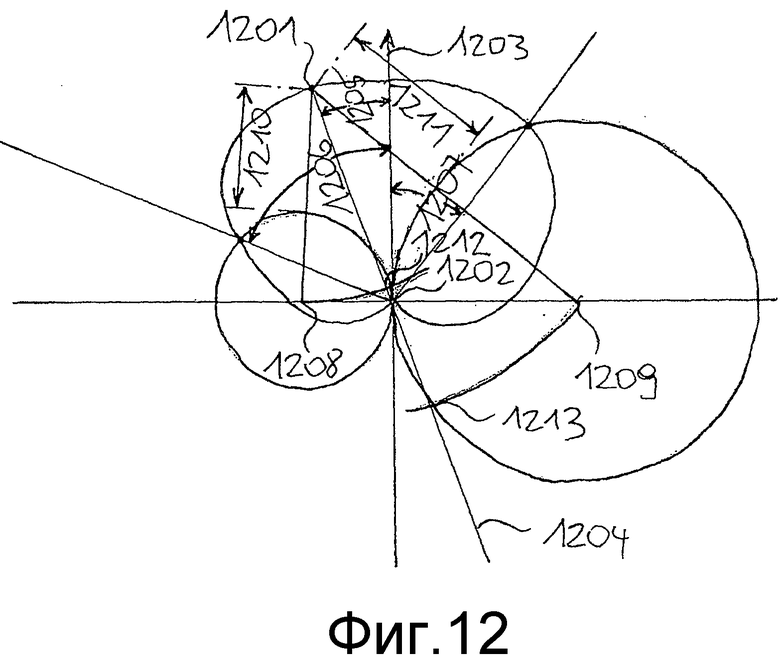
1. Устройство для стереофонизации монофонического сигнала, отличающееся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(cc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемого в полярных координатах;
(b) вычисления коэффициента усиления P(альфа), зависимого от угла фи, угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(бета), зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) непосредственного применения стереофонизируемого монофонического сигнала как главного сигнала;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа) и усиления задержанного сигнала на коэффициент усиления P(альфа); или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(альфа) и задержки усиленного сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета) и усиления задержанного сигнала на коэффициент усиления P(бета); или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления Р(бета) и задержки усиленного сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал.
2. Способ стереофонизации монофонического сигнала, отличающийся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(cc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемого в полярных координатах;
(b) вычисления коэффициента усиления P(альфа), зависимого от угла фи, угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(бета), зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) непосредственного применения стереофонизируемого монофонического сигнала как главного сигнала;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа) и усиления задержанного сигнала на коэффициент усиления P(альфа); или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(альфа) и задержки усиленного сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета) и усиления задержанного сигнала на коэффициент усиления P(бета); или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(бета) и задержки усиленного сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал.
3. Устройство для стереофонизации монофонического сигнала по п.1, отличающееся тем, что
(a) коэффициент усиления P(альфа) равен квадратичному полярному расстоянию для угла альфа, деленному на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(бета) равен квадратичному полярному расстоянию для угла бета, деленному на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи;
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из описанного в (a) коэффициента усиления P(альфа);
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из описанного в (b) коэффициента усиления P(бета).
4. Способ стереофонизации монофонического сигнала по п.2, отличающийся тем, что
(a) коэффициент усиления P(альфа) равен квадратичному полярному расстоянию для угла альфа, деленному на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(бета) равен квадратичному полярному расстоянию для угла бета, деленному на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи;
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из описанного в (a) коэффициента усиления P(альфа);
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из описанного в (b) коэффициента усиления P(бета).
5. Устройство для получения стереосигнала, эквивалентного стереосигналу, полученному согласно п.1, из монофонического сигнала, отличающееся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(cc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемого в полярных координатах;
(dd) выполнением условия, что квадратичное полярное расстояние для угла альфа, деленное на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярное расстояние для угла фи и синуса фи не является элементом окружения нулевым или равным нулю;
(b) вычисления коэффициента усиления PM ', зависимого от угла фи, угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(бета)', зависимого от угла фи, от угла альфа, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, от угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) усиления стереофонизируемого монофонического сигнала на коэффициент усиления PM ', чтобы получить главный сигнал;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета) и усиления задержанного сигнала на коэффициент усиления P(бета)'; или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(бета)' и задержки усиленного сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал,
6. Способ получения стереосигнала, эквивалентного стереосигналу, полученному согласно п.2, из монофонического сигнала, отличающийся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(cc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемого в полярных координатах;
(dd) выполнением условия, что квадратичное полярное расстояние для угла альфа, деленное на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярное расстояние для угла фи и синуса фи не является элементом окружения нулевым или равным нулю;
(b) вычисления коэффициента усиления PM ', зависимого от угла фи, от угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(бета)', зависимого от угла фи, от угла альфа, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, от угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) усиления стереофонизируемого монофонического сигнала на коэффициент усиления PM ', чтобы получить главный сигнал;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета) и усиления задержанного сигнала на коэффициент усиления P(бета)'; или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(бета)' и задержки усиленного сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал.
7. Устройство для стереофонизации монофонического сигнала по п.5, отличающееся тем, что
(a) коэффициент усиления PM ' равен обратному значению результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(бета)' равен произведению описанного в (a) коэффициента усиления PM ' и описанного в пункте 3(b) коэффициента усиления P(бета);
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи.
8. Способ стереофонизации монофонического сигнала по п.6, отличающийся тем, что
(a) коэффициент усиления PM ' равен обратному значению результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(бета)' равен произведению описанного в (a) коэффициента усиления PM ' и описанного в пункте 3(b) коэффициента усиления P(бета);
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи.
9. Устройство для получения стереосигнала, эквивалентного стереосигналу, полученному согласно п.1, из монофонического сигнала, отличающееся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(сc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемого в полярных координатах;
(dd) выполнением условия, что квадратичное полярное расстояние для угла бета, деленное на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи не является элементом окружения нулевым или равным нулю;
(b) вычисления коэффициента усиления PM ″, зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(альфа)', зависимого от угла фи, от угла альфа, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, от угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) усиления стереофонизируемого монофонического сигнала на коэффициент усиления PM, чтобы получить главный сигнал;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа) и усиления задержанного сигнала на коэффициент усиления P(альфа)'; или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(альфа)' и задержки усиленного сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал,
10. Способ получения стереосигнала, эквивалентного стереосигналу, полученному согласно п.2, из монофонического сигнала, отличающийся посредством
(a) оценки определенного вручную или измерениями угла фи, заключающего источник звука и главную ось микрофона, в комбинации с
(aa) произвольно или алгоритмически определенным фиктивным углом раскрыва альфа, который примыкает слева к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи положителен, выполняется условие, что угол фи меньше или равен углу альфа;
(bb) произвольно или алгоритмически определенным фиктивным углом раскрыва бета, который примыкает справа к главной оси микрофона, никакой элемент окружения не является нулевым или равным нулю, и для которого, если угол фи отрицателен, выполняется условие, что величина угла фи меньше или равна углу бета;
(cc) определенной вручную или измерениями характеристикой направленности стереофонизируемого монофонического сигнала, представляемой в полярных координатах;
(dd) выполнением условия, что квадратичное полярное расстояние для угла бета, деленное на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи не является элементом окружения нулевым или равным нулю;
(b) вычисления коэффициента усиления PM, зависимого от угла фи, угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(c) вычисления коэффициента усиления P(альфа), зависимого от угла фи, от угла альфа, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(d) вычисления времени задержки L(альфа), зависимого от угла фи, от угла альфа, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(e) вычисления времени задержки L(бета), зависимого от угла фи, от угла бета, а также характеристики направленности стереофонизируемого монофонического сигнала (представляемого в полярных координатах);
(f) усиления стереофонизируемого монофонического сигнала на коэффициент усиления PM, чтобы получить главный сигнал;
(g) задержки стереофонизируемого монофонического сигнала на время задержки L(альфа) и усиления задержанного сигнала на коэффициент усиления P(альфа); или альтернативно: усиления стереофонизируемого монофонического сигнала на коэффициент усиления P(альфа) и задержки усиленного сигнала на время задержки L(альфа);
(h) задержки стереофонизируемого монофонического сигнала на время задержки L(бета);
(i) суммирования полученных в (g) и (h) сигналов, чтобы получить боковой сигнал;
(j) стереопреобразования главного и бокового сигналов в стереосигнал.
11. Устройство для стереофонизации монофонического сигнала по п.9, отличающееся тем, что
(a) коэффициент усиления PM ″ равен обратному значению результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(альфа)' равен произведению описанного в (а) коэффициента усиления PM ″ и описанного в пункте 3(a) коэффициента усиления P(альфа);
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи.
12. Способ стереофонизации монофонического сигнала по п.10, отличающийся тем, что
(a) коэффициент усиления PM ″ равен обратному значению результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи;
(b) коэффициент усиления P(альфа)' равен произведению описанного в (a) коэффициента усиления PM ″ и описанного в пункте 3(a) коэффициента усиления P(альфа);
(c) время задержки L(альфа) равно отрицательному полярному расстоянию для угла альфа, деленному на удвоенный синус альфа, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла альфа, деленного на умноженный на 4 квадратичный синус альфа, плюс квадратичное полярное расстояние для угла фи, минус деленное на синус альфа произведение полярного расстояния для угла альфа, полярного расстояния для угла фи и синуса фи;
(d) время задержки L(бета) равно отрицательному полярному расстоянию для угла бета, деленному на удвоенный синус бета, плюс квадратный корень из результата, который вычисляется из квадратичного полярного расстояния для угла бета, деленного на умноженный на 4 квадратичный синус бета, плюс квадратичное полярное расстояние для угла фи, плюс деленное на синус бета произведение полярного расстояния для угла бета, полярного расстояния для угла фи и синуса фи.
13. Устройство по п.1, или 3, или 5, или 7, или 9, или 11, отличающееся посредством дополнительного преобразования соответственно полученного сигнала в стереофонические сигналы, которые воспроизводятся более чем двумя динамиками.
14. Способ по п.2, или 4, или 6, или 8, или 10, или 12, отличающийся посредством дополнительного преобразования соответственно полученного сигнала в стереофонические сигналы, которые воспроизводятся более чем двумя динамиками.
| US 6005946 A, 21.12.1999 | |||
| US 20070206690 A1, 06.09.2007 | |||
| RU 2005135650 A, 20.03.2006 | |||
| ОПТИМИЗИРОВАННОЕ ПО ТОЧНОСТИ КОДИРОВАНИЕ С ПЕРЕМЕННОЙ ДЛИНОЙ КАДРА | 2004 |
|
RU2305870C2 |
| СПОСОБ ПОЛУЧЕНИЯ И ЛОКАЛИЗАЦИИ КАЖУЩЕГОСЯ ИСТОЧНИКА ЗВУКА В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2092979C1 |
| КОДИРОВАНИЕ СТЕРЕОФОНИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2316154C2 |

