Изобретение относится к области гидроакустики и предназначено для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования.
Задача панорамного обзора пространства в горизонтальной плоскости всегда ставилась разработчиками аппаратуры гидроакустического шумопеленгования [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб: Наука, 2004].
Известны способы обнаружения шумящих в море объектов [Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S3/80, Антипов В.А., Величкин СМ., Подгайский Ю.П. Патент РФ №2339050 от 20.11.2008. Способ обнаружения шумящих в море объектов. МПК G01S 3/80, G01S 15/04], в которых осуществляется одновременный секторный (панорамный) обзор шумового пространства в горизонтальной плоскости статическим веером характеристик направленности. На выходе способов для оператора формируется визуальная индикаторная картина, по которой он обнаруживает шумящие объекты и определяет направление на них. При этом исходная звуковая информация, которая могла бы поступать к оператору по слуховому каналу, теряется.
Однако известно, что для повышения качества и оперативности анализа гидроакустической информации оператору необходимо использовать и слуховой канал [Деев В.В и др. Анализ информации оператором-гидроакустиком. Л.: Судостроение 1990. 130 с.]. Для этого используется способ шумопеленгования с трактом автоматического сопровождения цели и каналом прослушивания [Справочник по гидроакустике / Евтютов А.П., Колесников А.Е., Корепин Е.А. и др. Л.: Судостроение. 1988. 552 с.]. Недостатком этого способа является то, что канал прослушивания представляет оператору звуковую информацию в монофоническом режиме только по конкретному направлению на фиксированную цель. Оператор не имеет возможности прослушивать одновременно весь акустический горизонт во всем диапазоне курсовых углов режима шумопеленгования, что могло бы обеспечить новую возможность при использовании тракта прослушивания, т.е. повысить вероятность обнаружения морских объектов. Кроме того, указанный способ реализуется на средствах аналоговой техники, и не может быть заимствован без существенной доработки для современных средств цифровой обработки сигнала.
Наиболее близким аналогом по решаемым задачам и выполняемым процедурам к предлагаемому изобретению является способ обнаружения шумящих в море объектов [Антипов В.А., Величкин СМ., Подгайский Ю.П., Янпольская А.А. Патент РФ №2300118 от 27.05.2007. Способ обнаружения шумящих в море объектов. МПК G01S3/80], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают гидроакустический шумовой процесс многоэлементной антенной с развитой апертурой в горизонтальной плоскости,
осуществляют предварительное усиление и фильтрацию, и переводят шумовой процесс в частотную область,
формируют статический веер характеристик направленности, содержащий N пространственных каналов в горизонтальной плоскости,
осуществляют пространственно-частотно-временную обработку шумового процесса в каждом из N пространственных каналов с формированием панорамной индикаторной картины шумового поля,
осуществляют визуальный анализ информации на индикаторной картине, на основании которого принимают решение об обнаружении объекта в конкретном направлении.
Недостаток способа-прототипа заключается в том, что оператору для анализа предоставляется только визуальная информация, что ограничивает его потенциальные возможности по обнаружению объектов с использованием дополнительной слуховой информации.
Задачей изобретения является повышение вероятности обнаружения морских объектов оператором-гидроакустиком.
Для решения поставленной задачи в способ панорамного обнаружения звука в море, в котором принимают гидроакустический шумовой процесс многоэлементной антенной с развитой апертурой в горизонтальной плоскости, осуществляют предварительное усиление и фильтрацию, и переводят шумовой процесс в частотную область, формируют статический веер характеристик направленности, содержащий N пространственных каналов в горизонтальной плоскости, осуществляют обработку шумового процесса, в результате которой формируют панорамную индикаторную картину шумового поля для принятия решения об обнаружении объекта в конкретном направлении на основании анализа визуальной информации оператором-гидроакустиком, введены новые признаки, а именно:
дополнительно формируют панорамное звуковое поле в стереонаушниках, для чего переводят процесс с выхода каждого из N пространственных каналов из частотной во временную область, формируя N временных последовательностей X1(t), X2(t), …XN(t), осуществляют задержку каждой временной последовательности на свое время 
 ,
,
где символ L обозначает задержку для левого канала стереонаушников, символ i обозначает номер пространственного канала, ϕi - угловое направление пространственного канала номер i, М - среднее расстояние между ушами взрослого человека, С - скорость звука в воздухе,
формируют звуковой процесс для левого L(t) канала стереонаушников, осуществляя суммирование N временных последовательностей после задержки 
осуществляют задержку каждой временной последовательности на время 
 ,
,
где символ R обозначает задержку для правого канала стереонаушников,
формируют звуковой процесс для правого R(t) канала стереонаушников, осуществляя суммирование N временных последовательностей после задержки 
подают звуковой процесс L(t) в левый, а процесс R(t) - в правый канал стереонаушников, что формирует при прослушивании панорамное звуковое поле, а для обнаружения объекта используют анализ как визуальной, так и слуховой информации.
Технический результат изобретения заключается в обеспечении одновременного прослушивания всего акустического горизонта во всем диапазоне курсовых углов в стереофоническом представлении в виде панорамного акустического поля. Это дополняет визуальную информацию, предоставляемую оператору в виде индикаторной картины, и увеличивает потенциальные возможности по обнаружению шумящих объектов.
Покажем возможность достижения указанного технического результата предложенным способом.
Естественным восприятием акустической информации для человека является восприятие звука ушами через слуховую систему.
Известно [Алдошина А.А. Основы психоакустики. http://Koob.ru], что у человека локализация звука происходит с помощью взаимодействия двух симметричных половин слуховой системы (бинауральный слух). При этом рассматривают два основных механизма горизонтальной пространственной локализации источника звука:
- локализация по времени, связанная с тем, что моменты прихода одинаковых фаз звука к левому и правому уху не совпадают по времени из-за разнесения ушей в пространстве;
- локализация по интенсивности, связанная с экранирующим действием головы, когда интенсивность звука, огибающего голову, и попадающего в одно ухо, отличается от интенсивности звука, попадающего в другое ухо по прямой.
Оба механизма действуют одновременно во всем диапазоне частот, слышимых человеком. Первый механизм более ярко проявляет себя на низких частотах до 1-1.5 кГц, когда длина звуковой волны больше диаметра головы человека, и звук свободно огибает голову. Второй механизм начинает проявляться на высоких частотах более 1.5 кГц, когда длина волны становится меньше диаметра головы человека. В этом случае, голова становится препятствием на пути звуковой волны, которое приводит к ослаблению интенсивности звука.
Используя указанные механизмы локализации источника звука, можно с помощью стереонаушников искусственно создать для оператора звуковое гидроакустическое поле, которое он в способе-прототипе имеет возможность только наблюдать в виде визуальной индикаторной картины.
В нашем случае, когда мы создаем локализацию звука искусственно, можно ограничиться одним, а именно первым механизмом пространственной локализации, по следующим причинам:
- механизм локализации по времени является основным для человека и работает во всем звуковом диапазоне частот;
- в широкополосном шуме морских объектов преобладают низкочастотные составляющие, так как более высокочастотные составляющие подвержены сильному затуханию в морской среде;
- человек, для которого будет применен механизм локализации источника звука, будет воспринимать звук не непосредственно в воздухе, а через наушники, когда голова не будет являться препятствием для звука.
Тогда, для создания образа звукового гидроакустического поля в стереонаушниках необходимо имитировать попадание звука в левое и правое уши. Для пространственных каналов, расположенных справа, то есть соответствующих положительным значениям курсового угла, будем имитировать задержку, то есть отставание по времени для левого уха. А для пространственных каналов, расположенных слева, при отрицательных значениях курсового угла, будем имитировать задержку по времени для правого уха. Далее для создания панорамного звукового поля, на основании которого слуховая система сама будет локализовать источники звука в пространстве, будем объединять каждую из совокупностей временных последовательностей в единый процесс, и подавать их, соответственно, в левый и правый каналы стереонаушников. Для реализации этого в способе вводятся соответствующие процедуры.
Таким образом, способ позволит дополнить визуальную информацию способа-прототипа естественной для человека звуковой панорамой, что увеличит потенциальные возможности оператора по обнаружению шумящих объектов.
Сущность изобретения поясняется фиг. 1 и фиг. 2. На фиг. 1 изображена укрупненная блок-схема устройства, реализующего предлагаемый способ. На фиг. 2 приведена схема распространения звука, поясняющая бинауральный слух человека.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, на основе обобщенной структурной схемы типовой гидроакустической системы шумопеленгования [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004]. Структурная схема включает блоки: Антенна 1, система 2 формирования характеристик направленности (СФХН), блок 3 пространственно-частотно-временной обработки (ПЧВО), индикатор 4, блок 5 задержек для левого канала (Δ L), сумматор 6 для левого канала (Σ L), стереонаушники 7 (СН), блок 8 задержек для правого канала (Δ R), сумматор 9 для правого канала (Σ R). Выход Антенны 1 соединен с входом СФХН 2, содержащем N выходов по количеству формируемых пространственных каналов (ПК). Каждый из N выходов СФХН 2 соединен с N входами одновременно трех блоков: блока 5 Δ L, блока 8 Δ R и блока 3 ПЧВО. Выход блока 3 соединен с входом Индикатора 4. N выходов блока 5 соединены с N входами сумматора 6 Σ L, выход которого соединен с входом левого канала стереонаушников 7. N выходов блока 8 соединены с N входами сумматора 9 Σ R, выход которого соединен с входом правого канала стереонаушников 7.
С помощью аппаратуры (фиг. 1) заявленный способ реализуется следующим образом. Шумовое звуковое поле принимается многоэлементной Антенной 1, и поступает в СФХН 2, где формируется совокупность пространственных каналов обработки в горизонтальной плоскости. На фиг.1 пространственные каналы обозначены как ПКi, где i=1, N. Шумовые процессы каждого пространственного канала из блока 2 поступают в блок 3 ПЧВО, в котором по совокупности пространственных каналов осуществляется необходимая пространственно-частотно-временная обработка согласно способу-прототипу, и формируется индикаторный процесс, который поступает на Индикатор 4. Одновременно с этим шумовые процессы каждого пространственного канала переводятся во временную область, и из СФХН 2 поступают в блок 5 Δ L и в блок 8 Δ R. Шумовой процесс каждого пространственного канала подвергается задержке по времени, характерной для левого уха в блоке 5, и задержке по времени для правого уха - в блоке 8. Шумовые процессы каждого пространственного канала, задержанные в блоке 5, поступают в сумматор 6 Σ L, а шумовые процессы, задержанные в блоке 8, поступают в сумматор 9 Σ R. В блоках 6 и 9 осуществляются одинаковые процедуры суммирования принятых N шумовых процессов, в результате чего формируются звуковые процессы для левого (в блоке 6) и правого (в блоке 9) каналов стереонаушников. Эти процессы поступают в соответствующие входы стереонаушников 7.
Формирование значений задержек по времени, отдельно для левого (в блоке 5) и правого (в блоке 8) каналов в стереонаушниках осуществляется в блоках 5 и 8 для каждого из N пространственных каналов. Формирование задержек осуществляется по формулам, получение которых понятно из фиг. 2. На рисунке фиг. 2 обозначено: М - расстояние между ушами человека, ϕi - угловое направление пространственного канала i, с которого приходит звук, r - разность между расстоянием, пройденным звуком до правого уха, и расстоянием, пройденным звуком до левого уха. Используя элементарные геометрические соотношения, получим выражение для задержки по времени τi между приходом звука в правое ухо и приходом звука в левое ухо человека:

где М - расстояние между ушами человека, которое в среднем для взрослого человека принято считать равным 20 см,
С - скорость звука в воздухе, которую можно принять равной 330 м/с,
ϕi - угловое направление пространственного канала i, принимающее значения от минус 180 до +180°.
Однако здесь необходимо отметить две особенности.
Во-первых, задержка не должна быть отрицательной. Например, если осуществляется имитация прихода звука со стороны левого уха, то задержку необходимо вводить для правого канала стереонаушников, оставляя составляющие левого канала без задержки. И наоборот, если имитируется звук со стороны правого уха, то задержку необходимо вводить для левого канала стереонаушников, оставляя составляющие правого канала без задержки. Следовательно, задержку необходимо вводить в диапазоне ϕi<0 для правого канала, и в диапазоне ϕi>0 для левого канала.
Во вторых, при значениях ϕi<-90 и ϕi>90, то есть когда звук приходит к слуховой системе сзади, одного механизма локализации источника по задержке по времени становится недостаточно, поскольку в этом случае образуется мнимый источник звука, задержка по времени прихода от которого совпадает с задержкой прихода сигнала от реального источника, то есть τ(ϕ)=τ(180-ϕ). У человека, в этом случае, вступает в действие иной механизм локализации источника, не связанный ни с задержкой по времени, ни с изменением интенсивности звука. При искусственной локализации звука в наушниках для исключения этого эффекта необходимо ограничиться диапазоном угловых направлений пространственных каналов от минус 90 до +90° когда звук приходит только спереди.
С учетом изложенных особенностей, формулы для задержек шумовых процессов для левого L и правого R каналов стереонаушников для каждого пространственного канала i запишутся следующим образом:

Все изложенное позволяет считать задачу изобретения решенной. Предложен способ панорамного обнаружения звука в море, предназначенный для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ панорамного обнаружения шумящих в море объектов | 2020 |
|
RU2754200C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |

Использование: изобретение относится к области гидроакустики и предназначено для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования. Сущность: способ основан на приеме гидроакустического шумового процесса многоэлементной антенной с развитой апертурой в горизонтальной плоскости и формировании совокупности пространственных каналов в секторе обзора, в каждом из которых одновременно осуществляют частотно-временную обработку шумового процесса, в результате которой формируют панорамную индикаторную картину шумового поля, и принимают решение об обнаружении объекта в конкретном направлении на основании анализа визуальной информации. При реализации способа дополнительно формируют панорамное звуковое поле в стереонаушниках, для чего формируют звуковой процесс для левого и правого каналов стереонаушников, осуществляя суммирование временных последовательностей на выходе каждого пространственного канала после задержки по времени, соответствующей направлению канала в горизонтальной плоскости, а для обнаружения объекта используют анализ как визуальной, так и слуховой информации. Технический результат: обеспечение одновременного прослушивания всего акустического горизонта во всем диапазоне курсовых углов в стереофоническом представлении в виде панорамного акустического поля для дополнения визуальной информации, предоставляемой оператору в виде индикаторной картины, и увеличение потенциальных возможностей по обнаружению шумящих объектов. 2 ил.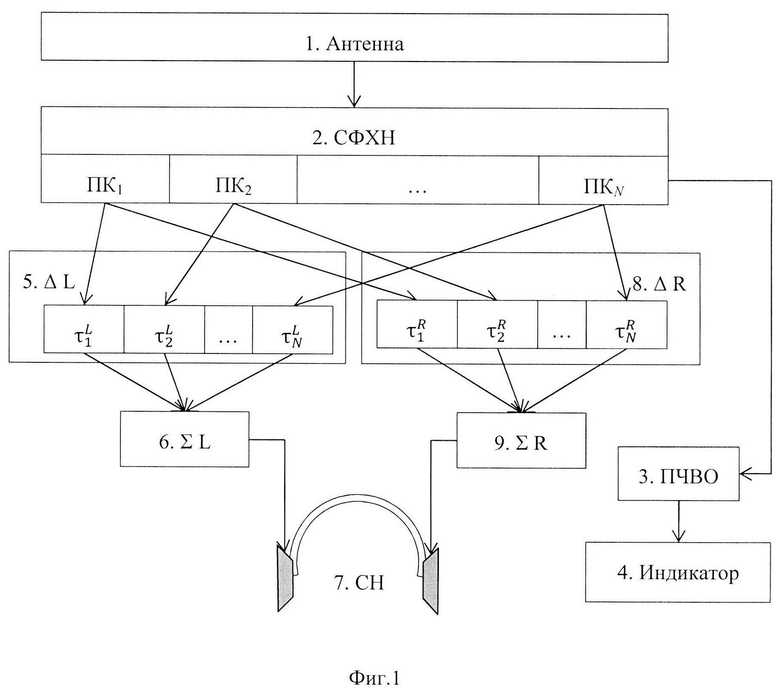
Способ панорамного обнаружения звука в море, в котором принимают гидроакустический шумовой процесс многоэлементной антенной с развитой апертурой в горизонтальной плоскости, осуществляют предварительное усиление и фильтрацию, и переводят шумовой процесс в частотную область, формируют статический веер характеристик направленности, содержащий N пространственных каналов в горизонтальной плоскости, осуществляют обработку шумового процесса, в результате которой формируют панорамную индикаторную картину шумового поля для принятия решения об обнаружении объекта в конкретном направлении на основании анализа визуальной информации оператором-гидроакустиком, отличающийся тем, что дополнительно формируют панорамное звуковое поле в стереонаушниках, для чего переводят процесс с выхода каждого из N пространственных каналов из частотной во временную область, формируя N временных последовательностей X1(t), X2(t), …XN(t), осуществляют задержку каждой временной последовательности на свое время 
 ,
,
где символ L обозначает задержку для левого канала стереонаушников, символ i обозначает номер пространственного канала, ϕi - угловое направление пространственного канала номер i, М - среднее расстояние между ушами взрослого человека, С - скорость звука в воздухе, формируют звуковой процесс для левого L(t) канала стереонаушников, осуществляя суммирование N временных последовательностей после задержки  осуществляют задержку каждой временной последовательности на время
осуществляют задержку каждой временной последовательности на время 
 ,
,
где символ R обозначает задержку для правого канала стереонаушников, формируют звуковой процесс для правого R(t) канала стереонаушников, осуществляя суммирование N временных последовательностей после задержки  подают звуковой процесс L(t) в левый, а процесс R(t) - в правый канал стереонаушников, что формирует при прослушивании панорамное звуковое поле, а для обнаружения объекта используют анализ как визуальной, так и слуховой информации.
подают звуковой процесс L(t) в левый, а процесс R(t) - в правый канал стереонаушников, что формирует при прослушивании панорамное звуковое поле, а для обнаружения объекта используют анализ как визуальной, так и слуховой информации.
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Стенд для исследования взаимодействия подвижного состава и пути в горизонтальной плоскости | 1957 |
|
SU114170A1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
| Гидролокатор с трактом прослушивания эхо-сигналов | 2017 |
|
RU2649655C1 |
| Диафрагмированный волновод | 1949 |
|
SU78953A1 |
| СПОСОБ ПОДАЧИ ДРЕВЕСНОЙ ЩЕПЫ В РЕАКТОР ПРЕДВАРИТЕЛЬНОГО ГИДРОЛИЗА | 2019 |
|
RU2805175C2 |

