Настоящее изобретение относится к области гидроакустики и предназначено для повышения эффективности работы многолучевых эхолотов при измерении глубины места.
Оценка глубины места осуществляется по результатам измерения времен прихода отраженных от дна сигналов с помощью промерного эхолота или многолучевого эхолота. Для точной оценки глубины необходимо достоверно знать распределение скорости звука по глубине на всей обследуемой акватории, что не всегда возможно. Постоянный мониторинг распределения скорости звука по глубине в процессе съемки на больших глубинах не используется, т.к. его практически трудно организовать. Вопросы неконтактной оценки вертикального распределения скорости звука широко исследовались у нас и за рубежом. В большинстве работ предлагаются подходы к решению данной проблемы применительно к большим глубинам, при этом зачастую используются вспомогательные устройства, обеспечивающие отражение сигнала на различных горизонтах, что является весьма затратным. В таком случае часто используют прогнозные сведения о распределении скорости звука, основанные на сезонных исследованиях и получении среднестатистических данных по гидрофизическим характеристикам для различных районов океана. Как результат, возникает методическая погрешность оценки глубины в силу высокой изменчивости характеристик верхнего слоя океана и неизвестной скорости звука на глубине. (В.Н.Матвиенко, Ю.Ф.Тарасюк «Дальность действия гидроакустических средств». Л.: Судостроение, 1981 г., с.21-25).
В условиях промышленного освоения шельфовой зоны океана для проведения инженерно-технических работ и навигации требуется съемка рельефа дна с высокой точностью оценки глубины места, поэтому особенно важны исследования методических погрешностей и поиск способов их минимизации до допустимого значения.
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры воды и солености воды и дальнейший расчет по известным номограммам скорости звука. (В.А.Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане» СПб. «Наука» 2003 г. стр.50-87).
Эти способы позволяют определять скорость звука по физическим измерениям температуры и солености, которые могут быть произведены путем забора проб воды и проведением химического анализа при конкретной процедуре измерения температуры. Измерение производится с использованием специальных судов и стандартных океанографических измерительных средств, в которые входят глубоководный опрокидывающийся термометр, термометр-глубомер, батитермограф, а также комплексные гидрологические зонды. Количество параметров измеряемых зондом и измерительных каналов зависят от выполняемых им конкретных задач. Информация об измеренных параметрах передается в бортовые приборы по одножильному кабель-тросу. Недостатком этих методов является необходимость специализированного судна и длительная процедура измерения.
Существуют прямые методы измерения скорости звука при использовании конкретных приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Для расчетов траекторий распространения сигналов используется таблицы, снятые для всех глубин и для всех морей и океанов, в которых указаны значения скоростей звука на различных глубинах. Как правило, эти значения являются устаревшими и не всегда соответствуют решаемым задачам, (стр.98 там же). Есть разовые гидрофизические зонды, которые погружаются до дна и по мере погружения передают информацию о значении скорости звука на конкретной глубине. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач при определении скорости звука для оценки глубины в многолучевых эхолотах.
Наиболее близким аналогом предложенного изобретения является способ, изложенный при описании работы «Устройства для измерения вертикального распределения скорости звука в жидких средах» по а.с. 761845, кл. G01S 5/00, автор Г.Н.Серавин, рассмотренный в книге В.А.Комлякова «Корабельные средства измерения скорости звука и моделирования акустических полей в океане» СПб., «Наука», 2003 г., стр.104-107.
Этот способ предполагает установку на днище корабля разнесенными по его длине узконаправленных излучающей и приемной антенн, характеристики направленности которых пересекаются в водном пространстве под кораблем. Одна из них направлена вертикально вниз, а вторую сканируют в вертикальной плоскости. Местонахождение и размер звукорассеивающего объема определяется областью пересечения сканирующей характеристики направленности с вертикально ориентированной характеристикой направленности.
Устройство реализует следующие операции:
- узконаправленное излучение вертикально вниз антенной, расположенной в носовой части корабля;
- прием сигналов антенной, расположенной в кормовой части корабля, узконаправленной характеристикой, сканируемой в вертикальной плоскости;
- нахождение звукорассеивающего объема, определяемого областью пересечения соответствующих характеристик направленности;
- измерение времени распространения сигналов по каждой из антенн;
- измерение углов прихода;
- измерение скорости звука на горизонте излучения;
- расчет скорости звука на глубине пересечения характеристик направленности излучающей и приемной антенн.
Как показали результаты исследования, малые коэффициенты объемного рассеяния звукорассеивающего объема существенно снижают уровни принятого сигнала, что уменьшает отношение сигнал/помеха на входе приемного устройства, поэтому эффективность используемого метода оказалась низкой.
Для измерения глубины места с помощью многолучевого эхолота необходимо знание скорости звука вблизи дна, которое не может быть определено с использованием известного метода.
Техническим результатом изобретения является обеспечение возможности определения скорости звука вблизи дна.
Для обеспечения указанного технического результата в способ, содержащий излучение зондирующего сигнала излучающей антенной, прием отраженного от дна сигнала приемной антенной, измерение скорости звука С0 на глубине излучения, измерение времени прихода отраженного от дна сигнала, введены новые операции, а именно: излучающая и приемная антенны расположены в одном месте, излучение производят излучающей антенной, имеющей ненаправленную характеристику направленности (ХН), приемная антенна имеет ХН в виде статического веера парциальных ХН, оси которых разнесены на углы порядка 2°, отраженный от дна сигнал принимают двумя парциальными ХН, оси которых отстоят друг от друга не более чем на 40°, измеряют углы наклона выбранных парциальных ХН α1 и α2, измеряют моменты времени T1 и Т2 прихода отраженных от дна сигналов, принятых этими парциальными ХН, определяют отношение  , последовательно перебирают возможные значения скорости звука CH вблизи дна в диапазоне ±20% от С0, с постоянным шагом, подставляя их в выражение:
, последовательно перебирают возможные значения скорости звука CH вблизи дна в диапазоне ±20% от С0, с постоянным шагом, подставляя их в выражение:

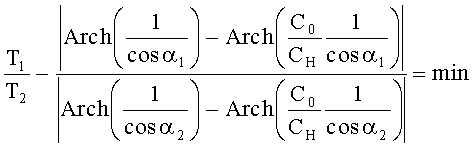
а за оценку CH принимают то ее значение, которое обеспечивает минимум разности по формуле:
Поясним достижение технического результата.
Известно (Бреховских Л.М., Лысанова Ю.П. Акустика океана. - В книге: «Физика океана», т.2, М., «Наука», 1978, с.49-145), что линейное распределение скорости звука характеризуется значением градиента скорости звука:
 ,
,
где ΔС - перепад скорости звука от горизонта наблюдения до дна, H - глубина места под килем. Зависимость скорости звука можно записать как:

где С0 - скорость звука на глубине наблюдения (горизонте приема-излучения).
Допустим, что реальное распределение значений скорости звука по глубине соответствует закону (1), однако известно только значение С0.
Время распространения сигнала по лучу от излучателя до дна в слое с постоянным градиентом скорости звука можно записать (Бреховских Л.М., Лысанова Ю.П. Акустика океана. - В книге «Физика океана», т.2, М., «Наука», 1978, с.49-145) как:

где α и α' - углы положения оси ХН излучающей антенны (относительно горизонтали) в точке излучения и у дна соответственно.
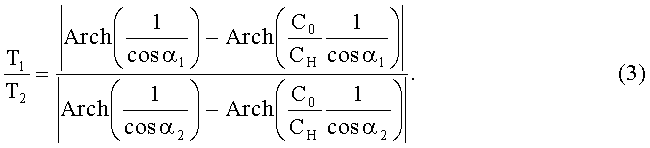
Сравним времена прохождения отраженных сигналов по разным лучам под углами α1 и α2, используя выражение (2), для этого воспользуемся соотношением  , а также
, а также  , что следует из закона Снелиуса. Тогда для соотношения времен можно записать:
, что следует из закона Снелиуса. Тогда для соотношения времен можно записать:
Таким образом, из выражения (3) видно, что путем оценивания времен прихода отраженных от дна сигналов по двум разнесенным по углам парциальных ХН может быть рассчитано значение скорости звука вблизи дна путем перебора, которое обеспечивает минимум разности измеренного соотношения и рассчитанного. Поскольку физической основой метода оценки CH является обязательное отражение от дна сигнала по ХН с углом входа α, то выполняется условие:  , отсюда вытекают требования в ограничении величины угла между осями парциальных ХН до 40°. Воспользуемся асимптотическим приближением гиперболического косинуса для больших аргументов - Archx≈ln(2x) и получим для больших углов
, отсюда вытекают требования в ограничении величины угла между осями парциальных ХН до 40°. Воспользуемся асимптотическим приближением гиперболического косинуса для больших аргументов - Archx≈ln(2x) и получим для больших углов  . Это соотношение времен прихода по ХН с большими углами между ХН практически не зависит от значения скорости звука на глубине CH. Поэтому для расчета должны выбираться парциальные ХН, которые ориентированы вниз, и оси характеристик должны быть разнесены не больше чем на 40°, что обеспечит лучшее результаты при вычислении тригонометрических функций. Для обеспечения работоспособности при малых углах разнесения необходимо обеспечить разрешение по углу, что определяет требования на ширину каждой характеристики направленности порядка 2°.
. Это соотношение времен прихода по ХН с большими углами между ХН практически не зависит от значения скорости звука на глубине CH. Поэтому для расчета должны выбираться парциальные ХН, которые ориентированы вниз, и оси характеристик должны быть разнесены не больше чем на 40°, что обеспечит лучшее результаты при вычислении тригонометрических функций. Для обеспечения работоспособности при малых углах разнесения необходимо обеспечить разрешение по углу, что определяет требования на ширину каждой характеристики направленности порядка 2°.
Блок схема устройства, реализующего предложенный способ, представлена на фиг.1
На фиг.1 многолучевой эхолот 1, в состав которого входит излучающая антенна 2 с генератором, соединенная с системой 4 управления и регистрации многолучевого эхолота 1, приемная антенна 3, соединенная через систему 5 формирования ХН, через основной процессор 6 обработки многолучевого эхолота, с первым входом блока 8 измерения времен прихода отраженных от дна сигналов. Блок 8 через первый вход вычислителя 10 отношений и определителя скорости звука вблизи дна, входящего в состав спецпроцессора 7 вторичной обработки, соединен со входом системы 4, второй выход которой соединен со вторым входом системы 5. Второй выход блока 8 через второй вход блока 9 соединен со вторым входом вычислителя 10, на третий вход которого поступает сигнал от измерителя 11 скорости звука на глубине излучения, а второй выход системы 5 соединен со вторым входом блока 9 спецпроцессора 7.
Реализация способа с использованием предлагаемого устройства происходит следующим образом. Многолучевой эхолот 1 работает в своем штатном режиме. Это известный прибор, который выпускается серийно во многих развитых странах. Достаточно подробно принципы работы многолучевого эхолота рассмотрены в отечественной литературе А.В.Богородский, Д.Б.Островский. Гидроакустические навигационные и поисково-обследовательские средства, СПб., 2009 г. Изд. ЛЭТИ, с.116-122, а также Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев «Корабельная гидроакустическая техника», СПб. «Наука», 2004 г., с.320-327.
Из системы 4 поступает команда на излучение зондирующего сигнала на излучающую антенну 2 с генератором и в блок 5 для обеспечения приема отраженного от дна сигнала, соответствующего излученному зондирующему сигналу. Приемная антенна 3 принимает отраженные от дна сигналы по всей апертуре антенны и через систему 5 передает их в основной процессор обработки 6, где производится оптимальная обработка принятых сигналов в статическом веере парциальных ХН системы 5. Из основного процессора обработки 6 отраженные от дна сигналы поступают в спецпроцессор 7, где в блоке 8 происходит измерение времен прихода отраженных от дна сигналов по всем парциальным ХН, оценки которых передаются в блок 9 измерения угла наклона парциальных ХН. В блоке 9 производится выбор двух парциальных ХН, для которых производится измерение времен прихода отраженных от дна сигналов и определение углов их наклона. Измеренные времена прихода отраженных от дна сигналов и соответствующие им углы наклона парциальных ХН поступают в блок 10 спецпроцессора вторичной обработки 7. На третий вход вычислителя 10 поступает измеренная скорость звука на глубине излучения от измерителя скорости звука 11. В блоке 10 происходит вычисление отношений времен прихода и вычисление функциональной зависимости от углов прихода по приведенной выше функции (3) в соответствии с разработанной программой. Минимальное значение разности между отношением времен и отношением функциональных зависимостей даст оценку скорости звука вблизи дна. Определенное значение скорости звука вблизи дна передается в систему 4 для определения глубины места. Измерение скорости звука на глубине излучения С0 производится измерителем 11, который является известным устройством, выпускается серийно и широко известен в литературе. (В.А.Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане», СПб. «Наука», 2003 г., стр.50-87). Все блоки 6, 7, 8, 9, 10, 11, используемые для определения скорости звука вблизи дна, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа многолучевого эхолота. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации. (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев «Корабельная гидроакустическая техника», СПб. «Наука», 2004 г., с.281-289). Все современные многолучевые эхолоты разрабатываются с использованием современной высокоскоростной цифровой техники на основе спецпроцессоров.
Таким образом, предлагаемое техническое решение позволяет использовать стандартную разработанную аппаратуру многолучевого эхолота с помощью дополнительной программы, определять скорость звука на глубине с достаточной достоверностью, что позволит повысить точность оценки глубины по данным эхолота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ | 2014 |
|
RU2555204C1 |
| Способ определения скорости звука | 2021 |
|
RU2776959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ МОРЯ НА ПОГРУЖЕННОМ АППАРАТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2029439C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОКАТОРОМ ПАРАМЕТРОВ ВЫТЕКАЮЩЕГО ГАЗА ИЗ ТРУБЫ ПОДВОДНОГО ГАЗОПРОВОДА | 2016 |
|
RU2631228C1 |
| СПОСОБ АДАПТИВНОЙ ОБРАБОТКИ СИГНАЛА ШУМОИЗЛУЧЕНИЯ | 2014 |
|
RU2561010C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2516602C1 |
Изобретение относится к области гидроакустической метрологии и может быть использовано для построения современных многолучевых эхолотов.
Производят ненаправленное излучение зондирующего сигнала в сторону дна, прием отраженного сигнала веером статических характеристик направленности (ХН), измерение скорости звука на глубине их излучения, сигнал, отраженный от дна, принимают двумя парциальными ХН под углами меньше, чем 40 градусов от нормали, а их оси разнесены на углы порядка 2 градуса, измеряют углы направленности выбранных парциальных ХН, измеряют времена прихода сигналов, отраженных от дна, в выбранные парциальные ХН, определяют отношение времен распространения принятых сигналов, производят последовательный перебор возможных значений скорости звука на глубине у дна в диапазоне 30% от скорости звука, измеренной на глубине излучения с шагом 0,5 м/сек, а за оценку скорости звука на глубине принимают то значение, которое обеспечивает минимум разности. Техническим результатом является повышение точности измерения глубины многолучевым эхолотом. 1 ил. 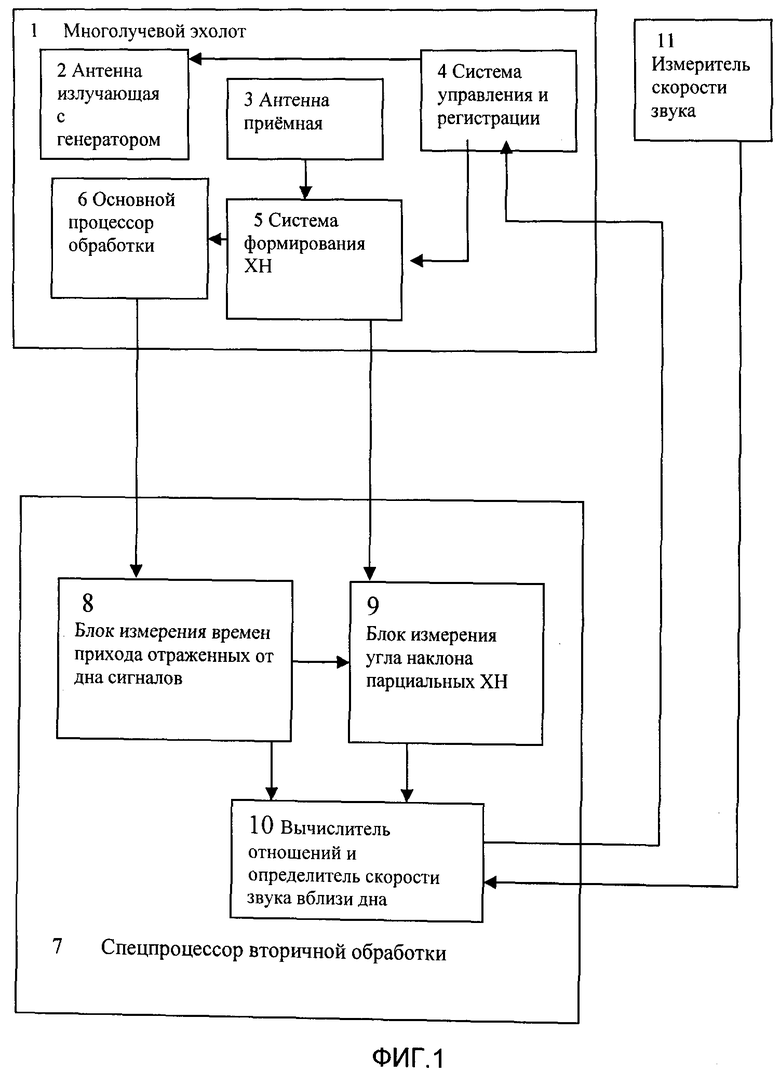
Способ определения скорости звука, содержащий излучение зондирующего сигнала излучающей антенной, прием отраженного от дна сигнала приемной антенной, измерение скорости звука С0 на глубине излучения, измерение времени прихода отраженного от дна сигнала, отличающийся тем, что излучающая и приемная антенны расположены в одном месте, излучение производят излучающей антенной, имеющей ненаправленную характеристику направленности (ХН), приемная антенна имеет ХН в виде статического веера парциальных ХН, оси которых разнесены на углы порядка 2°, отраженный от дна сигнал принимают двумя парциальными ХН, оси которых отстоят друг от друга не более чем на 40°, измеряют углы наклона выбранных парциальных ХН α1 и α2, измеряют моменты времени T1 и T2 прихода отраженных от дна сигналов, принятых этими парциальными ХН, определяют отношение  , последовательно перебирают возможные значения скорости звука CH вблизи дна в диапазоне ±20% от С0, с постоянным шагом, подставляя их в выражение:
, последовательно перебирают возможные значения скорости звука CH вблизи дна в диапазоне ±20% от С0, с постоянным шагом, подставляя их в выражение:
а за оценку CH принимают то ее значение, которое обеспечивает минимум разности по формуле:
| СПОСОБ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКОЙ СРЕДЕ | 2010 |
|
RU2456554C2 |
| SU 761845 А1 (Серавин Г Н), 07.09.1980 | |||
| RU 96121682 А1 (Серавин Г Н), 06.11.1996 | |||
| Способ измерения распределения скорости звука в жидкой среде | 1987 |
|
SU1460619A1 |
| US 2008279045 А1 (Westerngeco L | |||
| L | |||
| C.), 13.11.2008 | |||
| US 5608689 A1 (Seabeam Instruments Inc.), 04.03.1997 | |||
| WO 2001042808 A2 (STN ATLAS MARINE ELECTRONICS), 14.06.2001. | |||

