Изобретение относится к области гидроакустики и может быть использовано в гидроакустических станциях для обнаружения айсбергов и оценки их характеристик.
Как правило, это необходимо для защиты морских сооружений (в том числе нефтяных и газовых буровых платформ) от ледяных образований (в первую очередь айсбергов).
Известен акустогидростатический способ определения толщины погруженной части льда (или осадки айсберга), суть которого состоит в вычислении разности между глубиной погружения акустической антенны узколучевого эхолота с обращенной вверх антенной, определяемой с помощью преобразователя абсолютного гидростатического давления, и дистанции от антенны до границы раздела вода-лед, определяемой с помощью гидролокатора (А.В. Богородский, Д.Б. Островский. Гидроакустические навигационные и поисково-обследовательские средства. СПб., изд. «ЛЭТИ», 2009 г. С.123-170). Основным недостатком этого способа является то, что он позволяет определить осадку айсберга только при его нахождении непосредственно над антенной.
Известен гидроакустический способ определения толщины молодых льдов, сущность которого заключается в том, что оценка толщины льда достигается с помощью направленного к поверхности моря эхолота, излучающего зондирующие импульсы одновременно на двух частотах, высокой и низкой, существенно (на порядок и более) отличающихся друг от друга. Зондирующий импульс с высокочастотной несущей отражается от нижней поверхности льда, а с низкочастотной несущей - от его верхней (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб., изд. «Наука», 2004 г., стр.129-130). Для реализации гидроакустического способа нижняя частота должна находиться в районе 1 кГц, а высокая в районе 100 кГц. Основным недостатком данного способа является то, что его точность зависит от точности знания средней скорости звука в слое льда, которая может меняться в достаточно широких пределах в зависимости от условий образования льда, его возраста, толщины и времени года. В этой связи целесообразная область применения гидроакустического эхоледомера - измерение толщины молодых льдов, толщина которых не превышает 1,0…1,2 м.
Наиболее близким аналогом, который может быть выбран за прототип, является способ обследования нижней поверхности ледового покрова, приведенный на стр.131-139 в книге: Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб., изд. «Наука», 2004 г., с помощью ГАС бокового и кругового (секторного) обзора, которые дают информацию о форме, размерах и распределении акустических неоднородностей нижней поверхности льда в пределах обследуемой ими площади, в виде двумерного яркостного изображения поверхности, формируемого на устройствах отображения. Интерпретация изображений обследуемых участков нижней поверхности льда базируется на различии коэффициентов обратного рассеяния звуковых волн, отраженных поверхностью разводья, и окружающим его льдом. Недостатком такого способа является малая зона обзора, которая зависит от отстояния антенн гидролокатора от нижней поверхности льда. Эффективная полоса зоны обзора ГБО и ГКО при обследовании ровных, не подвергавшихся торошению льдов составляет 6-7 значений отстояния антенн гидролокатора от нижней поверхности льда. При обследовании паковых льдов значение этой основной характеристики ГАС снижается до 3,0…3,5 значений отстояния вследствие проявления эффекта затенения поверхности элементами рельефа на скользящих углах падения акустического луча. Так, например, при отстоянии антенны ГБО от нижней кромки льда, равном 100 м, эффективная полоса обзора пакового льда не превысит 300…350 м.
Задачей предлагаемого способа является повышение эффективности определения параметров айсберга.
Технический результат изобретения заключается в повышении точности определения осадки айсберга в автоматическом режиме.
Для обеспечения заявленного технического результата в способ определения осадки айсберга, содержащий излучение зондирующего сигнала в момент времени Tм.изл, прием эхосигнала, фильтрацию, детектирование и вывод на индикатор, включены новые признаки, а именно: прием эхосигнала осуществляют приемной антенной со статическим веером характеристик направленности (ХН) в вертикальной плоскости (ВП), пронумерованных от поверхности ко дну, выбирают порог П2=а·П1, где П1 - порог, определенный по уровню изотропной помехи, а - эмпирический коэффициент, зависящий от эквивалентного радиуса айсберга, определенного по результатам натурных исследований отражательной способности айсбергов различной формы и размера, измеряют длительность превышения Tпрев принятым эхосигналом порога П2 в каждой ХН в ВП, отбирают ХН, в которых выполняется условие Tпрев>Tизл, где Tизл - длительность излучаемого сигнала, из отобранных ХН выбирают ХН с максимальным номером и фиксируют момент времени обнаружения эхосигнала от айсберга Tм.а, далее в этой ХН определяют момент времени приема эхосигнала от дна Tм.дно как момент превышения амплитуды эхосигнала над порогом П1 при выполнении условия Tм.дно>Tм.а, определяют дистанцию до нижней точки отражения от айсберга Да=(Tм.а-Tм.изл)·C/2, где C - скорость звука в воде, определяют дистанцию до начала отражения от дна Ддно=(Tм.дно-Tм.изл)·C/2, определяют угол β наклона ХН, в которой обнаружен эхосигнал от дна по формуле cos(β)=(Hм-h)/Ддно, где H - глубина размещения фазового центра приемной антенны, Hм - глубина места, определяют осадку айсберга по формуле Hа=Hм-(Ддно-Да)·cos(β) и индицируют числовое значение осадки айсберга.
Сущность предлагаемого способа основана на локации пространства гидролокатором, содержащим излучатель, а также приемную антенну, имеющую статический веер узких ХН в ВП.
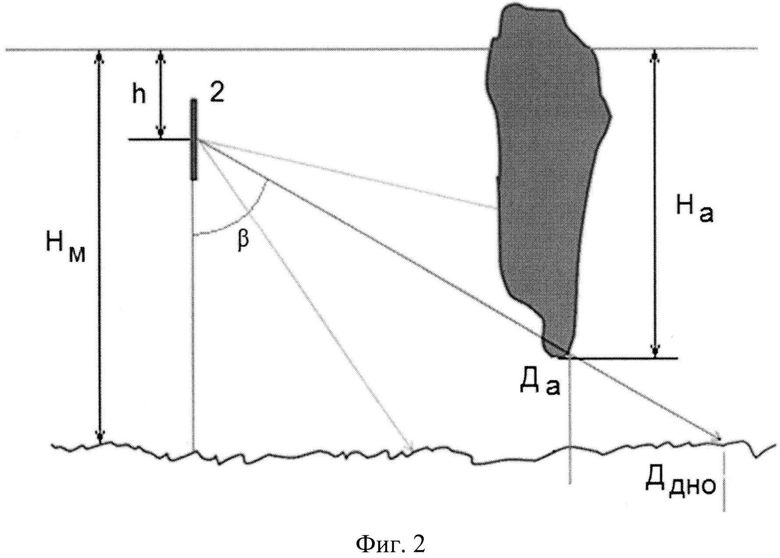
Информацию об осадке айсберга можно получить по величине зоны акустической тени от айсберга, которая характеризуется длиной зоны отсутствия сигнала после отражения от айсберга, что будет определяться ХН, в которой будет обнаружен эхосигнал от айсберга и эхосигнал от дна с максимальным значением момента времени его прихода.
Размер зоны акустической тени напрямую связан с осадкой айсберга и углом локации. Угол локации можно определить по глубине погружения фазового центра приемной антенны, глубине места и по измеренной дистанции до дна (перед зоной акустической тени после айсберга). По длине тени и углу локации можно определить осадку айсберга.
Сущность изобретения поясняется фиг.1 и 2, где на фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ, а на фиг.2 этот способ проиллюстрирован.
Устройство содержит излучающую антенну 1, соединенную через коммутатор 3 приема передачи двусторонней связью с блоком 4 управления и согласования, далее с блоком 5 формирования ХН и зондирующих сигналов, далее с блоком 6 выбора порогов, блоком 7 измерения длительности ответного эхосигнала, далее с блоком 8 селекции ХН, блоком 9 определения дистанции, далее с блоком 10 определения угла локации айсберга и блоком 11 определения осадки айсберга и индикации.
Приемная антенна 2 через коммутатор 3 приема передачи соединена со вторым входом блока 4 двусторонней связью и далее с блоком 5 формирования ХН и зондирующих сигналов.
Антенны 1 и 2 являются известными направленными акустическими антеннами. Также аппаратура приема передачи 3 является известным устройством, используемым в прототипе. Блоки 4-11 могут быть реализованы в едином вычислительном устройстве - спецпроцессоре. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для автоматического определения осадки айсберга (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб., изд. «Наука», 2004 г. Стр.281).
Реализацию способа целесообразно рассмотреть на примере работы устройства.
В блоке 5 формируется зондирующий сигнал, который через блок 4 управления и согласования и аппаратуру 3 приема передачи поступает на излучающую антенну 1, которая облучает айсберг. Отраженный эхосигнал поступает на приемную антенну 2, далее через аппаратуру 3 приема передачи и блок 4 в блок 5, где формируется статический веер ХН приемной антенны 2.
В блоке 6 выполняется выбора порога П2=а·П1 где 
В блоке 8 выполняется селекция ХН, в которых обнаружен эхосигнал от айсберга (амплитуда эхосигнала Uс больше порога обнаружения П2) и длительность эхосигнала больше длительности излученного сигнала (Tпрев>Tизл). Выбирается ХН в ВП с максимальным порядковым номером.
Далее в блоке 9 определяется момент времени Tм.а обнаружения принятого эхосигнала от айсберга и момент времени обнаружения принятого эхо-сигнала от дна Tм.дно в отобранной ХН. Определяется дистанция до начала отражения от айсберга Да (фиг.2) по формуле Да=(Tм.а-Tм.изл)·C/2 и дистанция до начала отражения от дна Ддно за айсбергом по формуле Ддно=(Tм.дно-Tм.изл)·C/2. После этого в блоке 10 определяется угол локации β (угол наклона ХН, в которой обнаружен эхосигнал от дна) из выражения cos(β)=(Hм-h)/Ддно. В блоке 11 вычисляется осадка айсберга Hа с учетом данных о глубине фазового центра приемной антенны и глубине места Hа=(Дпов-Да)·cos(β) и на индикатор выводится числовое значение осадки айсберга Hа.
Таким образом, обеспечивается автоматическое определение осадки айсберга и повышается точность определения осадки, поскольку оценка осадки айсберга вырабатывается автоматически на основе информации о задержках между зондирующим сигналом, отраженным эхосигналом от айсберга и от дна, а не оператором на основе анализа двумерного яркостного изображения лоцируемой поверхности, результат которого зависит от квалификации оператора ГБО (ГКО). Это позволяет считать, что технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА | 2015 |
|
RU2603831C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АЙСБЕРГА ГИДРОЛОКАЦИОННЫМ МЕТОДОМ | 2016 |
|
RU2619311C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ определения вертикального угла положения подводного объекта | 2023 |
|
RU2810693C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
Изобретение относится к области гидроакустики и может быть использовано в навигационных приборах (гидроакустических станциях) обнаружения ледяных образований (в том числе айсбергов) и оценки его характеристик. Способ предназначен для автоматического определения осадки айсберга для защиты морских сооружений (в том числе нефтяных и газовых буровых платформ) от ледяных образований (в первую очередь айсбергов). Для этого айсберг облучают с помощью направленной (в горизонтальной плоскости) гидроакустической антенны и принимают отраженный эхосигнал от айсберга с помощью приемной гидроакустической антенны с формированием статического веера узких характеристик направленности в вертикальной плоскости. Порог автоматического обнаружения выбирается по уровню изотропной помехи как среднее значение амплитуд всех отсчетов первого цикла обработки всех характеристик направленности в вертикальной плоскости (ХН ВП). Определяются в каждой ХН ВП амплитуда отсчета, превысившего порог обнаружения, номер временного отсчета, номер временного цикла обработки. Длительность эхосигнала определяется как произведение числа отсчетов, превысивших порог обнаружения, с длительностью между отсчетами. Решение о наличии эхосигнала от цели принимается путем сравнения амплитуды эхосигнала с порогом обнаружения с одновременной оценкой длительности эхосигнала. После этого выбираются временные циклы обработки соседних ХН и выполняется их анализ. Осадка айсберга определяется по размеру зоны акустической тени на дне, которая будет определять величину задержки между эхосигналом от айсберга и эхосигналом от дна в одной ХН. Точность определения осадки айсберга будет определяться точностью определения глубины погружения фазового центра приемной антенны, глубины места и шириной ХН приемной антенны. 2 ил.
Способ определения осадки айсберга, содержащий излучение зондирующего сигнала в момент времени Tм.изл, прием эхосигнала, фильтрацию, детектирование и индикацию, отличающийся тем, что прием эхосигнала осуществляют приемной антенной со статическим веером характеристик направленности (ХН) в вертикальной плоскости (ВП), пронумерованных от поверхности ко дну, выбирают порог П2=а·П1, где П1 порог, определенный по уровню изотропной помехи, а - эмпирический коэффициент, зависящий от эквивалентного радиуса айсберга, определенного по результатам натурных исследований отражательной способности айсбергов различной формы и размера, измеряют длительность превышения Tпрев принятым эхосигналом порога П2 в каждой ХН в ВП, отбирают ХН, в которых выполняется условие Tпрев>Tизл, где Tизл - длительность излучаемого сигнала, из отобранных ХН выбирают ХН с максимальным номером и фиксируют момент времени обнаружения эхосигнала от айсберга Tм.а, далее в этой ХН определяют момент времени приема эхосигнала от дна Tм.дно как момент превышения амплитуды эхосигнала над порогом П1 при выполнении условия Tм.дно>Tм.а, определяют дистанцию до нижней точки отражения от айсберга Да=(Tм.а-Tм.изл)·C/2, где C - скорость звука в воде, определяют дистанцию до начала отражения от дна Ддно=(Tм.дно-Tм.изл)·C/2, определяют угол β наклона ХН, в которой обнаружен эхосигнал от дна по формуле cos(β)=(Hм-h)/Ддно, где h - глубина размещения фазового центра приемной антенны, Hм - глубина места, определяют осадку айсберга по формуле Hа=(Дпов-Да)·cos(β) и индицируют числовое значение осадки айсберга.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ МОРСКОГО ЛЬДА | 2010 |
|
RU2439490C2 |
| RU2012109367 А, 20.09.2013 | |||
| Способ определения толщины морского льда | 1991 |
|
SU1818606A1 |
| US3665466 A, 23.05.1972 | |||
| US2008295599 A1, 04.12.2008 | |||
| US2004143395 A1, 22.07.2004 | |||

